

سرویسهای مبتنی بر مکان (LBS):سرویسهای مبتنی بر مکان (LBS) برنامههای تلفن همراهی هستند که بسته به موقعیت مکانی کاربر اطلاعاتی را ارائه میکنند. برای کارکرد LBS، اجزای مختلف سیستم مورد نیاز است، به عنوان مثال، دستگاه های تلفن همراه، موقعیت یابی، شبکه های ارتباطی، و ارائه دهنده خدمات و محتوا. تقریباً هر برنامه LBS برای انجام وظایف اصلی موقعیتیابی، مدلسازی داده و ارتباطات اطلاعاتی به چندین عنصر کلیدی نیاز دارد. با پیشرفت سریع در فناوری اطلاعات تلفن همراه، LBS در زندگی روزمره ما با بسیاری از زمینه های کاربردی مانند ناوبری و مسیریابی، شبکه های اجتماعی، سرگرمی و مراقبت های بهداشتی همه جا حاضر شده است. چالشهای متعددی نیز در حوزه LBS وجود دارد که در میان آنها حریم خصوصی یکی از چالشهای اصلی است. این مبحث مؤلفهها و فناوریهای کلیدی، مدلسازی، ارتباطات، برنامههای کاربردی و چالشهای LBS را معرفی میکند.
1. بررسی اجمالی
سالهای اخیر شاهد پیشرفتهای سریع در خدمات مبتنی بر مکان (LBS) با تکامل مداوم فنآوریهای ارتباطی و دستگاههای تلفن همراه بودهاند که زیربنا و پشتیبانی از خدمات هستند. در سطح بالایی از انتزاع، LBS را می توان به عنوان برنامه های کاربردی کامپیوتری (مخصوصاً برنامه های محاسباتی سیار) تعریف کرد که بسته به مکان دستگاه و کاربر اطلاعات را ارائه می دهند (راپر و همکاران، 2007)، بیشتر از طریق دستگاه های قابل حمل سیار (مثلاً). تلفن های هوشمند دارای سیستم موقعیت یاب جهانی (GPS) و شبکه های تلفن همراه (به عنوان مثال، شبکه های مخابراتی بی سیم و شبکه های Wi-Fi). اخیراً LBS نه تنها در محیطهای بیرونی شهر، بلکه در مراکز خرید، موزهها و بسیاری از محیطهای داخلی دیگر نیز محبوبیت بیشتری پیدا کرده است. آنها برای سیستم های ناوبری، خدمات اضطراری، خدمات گردشگری،
LBS با دیگر سیستمهای اطلاعات جغرافیایی سنتی (GIS) و برنامههای نقشهبرداری وب متفاوت است، زیرا از زمینهای که کاربران خود در حال حاضر در آن هستند آگاه هستند و میتوانند محتوا و ارائه را بر این اساس تطبیق دهند (Steiniger et al., 2006). یکی دیگر از ویژگی های متمایز این است که LBS اغلب در یک محیط پویا و متحرک استفاده می شود. این ویژگی های متمایز باعث می شود که توسعه برنامه های کاربردی LBS از سایر برنامه های GIS متفاوت باشد.
در ادامه به معرفی اجزای ضروری در LBS از منظر سیستم می پردازیم. پس از آن، ما در مورد وظایف اصلی که LBS باید با آنها سر و کار داشته باشد، یعنی موقعیت یابی، مدل سازی و ارتباطات اطلاعاتی بحث می کنیم. فن آوری های کلیدی و اجزای هر وظیفه اصلی معرفی شده است. سپس برنامه های معمول LBS و روندهای نوظهور را معرفی می کنیم. ما با خلاصهای از تکامل و چالشهای جاری در حوزه LBS نتیجهگیری میکنیم.
2. اجزای LBS
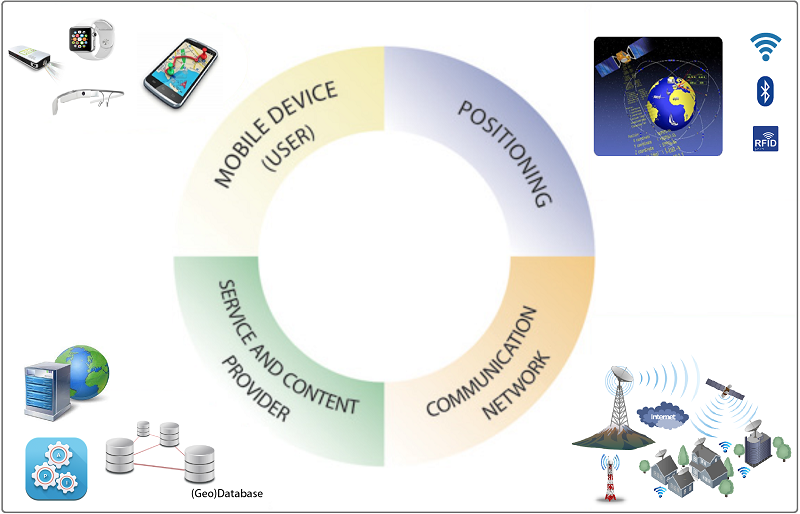
برای کارکرد LBS، چندین مؤلفه کلیدی ضروری است: یک دستگاه تلفن همراه، قابلیت های موقعیت یابی، یک شبکه ارتباطی، و یک ارائه دهنده خدمات و محتوا (شکل 1). در ادامه به معرفی هر یک از این مولفه ها می پردازیم.
شکل 1. اجزای سیستم LBS (اقتباس شده از Steiniger و همکاران (2006) در CartouCHe تحت CC BY 2.0).
دستگاه تلفن همراه: کلاینتی برای درخواست و دریافت اطلاعات مورد نیاز کاربر با توجه به موقعیت مکانی خود در محیط های موبایل. نتایج را می توان در اشکال مختلف، مانند گرافیکی (به عنوان مثال، نقشه های موبایل، واقعیت افزوده، و 3D)، شفاهی (به عنوان مثال، دستورالعمل های شفاهی)، لمسی (به عنوان مثال، لرزش)، و ترکیبی ارائه شده است. دستگاههای احتمالی شامل گوشیهای هوشمند، دستگاههای پوشیدنی مانند ساعتهای هوشمند و شیشه دیجیتال، دستگاههای لمسی، نمایشگرهای عمومی، دستگاههای داخلی (مانند سیستمهای ناوبری داخلی خودرو) و غیره هستند.
موقعیت یابی: جزء موقعیت یابی مکان فعلی کاربر را تعیین می کند. برای کاربردهای LBS در فضای باز، اغلب از GPS استفاده می شود. الگوریتمهای تطبیق نقشه اغلب برای بهبود دقت ضعیف GPS در محیطهای شهری استفاده میشوند. برای کاربردهای LBS داخلی، فناوریهای دیگری مانند WiFi، بلوتوث و شناسایی فرکانس رادیویی (RFID) در دسترس هستند.
شبکه ارتباطی: شبکه ارتباطی (به عنوان مثال شبکه سلولی یا شبکه WiFi) داده ها و درخواست خدمات کاربر را از دستگاه تلفن همراه خود به ارائه دهنده خدمات و محتوا منتقل می کند و اطلاعات درخواستی را به دستگاه کاربر ارسال می کند.
ارائهدهنده خدمات و محتوا: ارائهدهنده خدمات و محتوا درخواستهای کاربر را پردازش میکند و اطلاعات مورد نیاز را برمیگرداند. ممکن است تمام اطلاعات را ذخیره و نگهداری نکند، و اغلب نیاز به دسترسی و ادغام سایر منابع داده (به عنوان مثال، مرزهای جغرافیایی، داده های شبکه جاده، داده های نقاط مورد علاقه (POI) و داده های رویداد) برای پردازش درخواست خدمات دارد.
در برخی از برنامههای LBS (به عنوان مثال، سیستمهای ناوبری داخلی خودرو)، ممکن است یکی دو مؤلفه آخر وجود نداشته باشد، زیرا برنامههای LBS ممکن است تمام اطلاعات را به صورت محلی روی دستگاه تلفن همراه ذخیره کرده و تمام درخواستهای خدمات را فقط در دستگاه تلفن همراه پردازش کنند. دستگاه بنابراین نیازی به ارسال درخواست از طریق شبکه ارتباطی برای ارائه دهنده خدمات و محتوا نیست. با این حال، اخیراً، سیستمهای اطلاعات رسانه داخلی داخلی جدید استاندارد جدیدی (مانند CarPlay) را برای ترکیب شبکه ارتباطی و خدمات مبتنی بر مکان موجود در تلفنهای هوشمند در سیستمهای اطلاعات سرگرمی خودرو به صورت پویا اتخاذ کردهاند.
3. موقعیت یابی
تعیین موقعیت یک عنصر کلیدی برای پشتیبانی از LBS است. این شامل انواع فنآوریهای حسگر موقعیت و روشهای موقعیتیابی است که برای محیطهای بیرونی و داخلی توسعه داده شدهاند.
3.1 فن آوری های موقعیت یابی در فضای باز
بسته به توسعه زیرساخت های فناوری اطلاعات، جریان اصلی فناوری های موقعیت یابی در فضای باز شامل سیستم های ماهواره ای ناوبری جهانی (GNSS)، شبکه های سلولی و شبکه های بی سیم است.
GNSS: GNSS اطلاعات مکان (طول/طول جغرافیایی) و زمان را در تمام شرایط آب و هوایی، در هر نقطه از سطح زمین یا نزدیک به آن که یک خط دید بدون مانع برای حداقل چهار یا چند ماهواره موقعیت یاب جهانی وجود دارد، ارائه دهید. زیرساخت های معروف GNSS شامل GPS NAVSTAR ایالات متحده، GLONASS روسی، سیستم ماهواره ای ناوبری چینی BeiDou و سیستم گالیله اتحادیه اروپا است. محبوب ترین GNSS که بر روی دستگاه های تلفن همراه در سهم بازار فعلی مستقر شده است GPS است. Trilateration یک رویکرد کلاسیک برای تعیین مختصات گیرنده GPS با اندازه گیری فواصل است (Hofmann-Wellenhof et al., 2012). بسیاری از تکنیکها و روشهای موقعیتیابی بر اساس تراشههای GPS با دقت بالا، GPS دیفرانسیل و GPS کمکی توسعه یافتهاند. برای بهبود دقت مکان یابی در محیط های شهری متراکم،
شبکه های تلفن همراه:امروزه شبکههای سلولی یکی از مهمترین زیرساختهای ارتباطی بین مردم بوده و تقریباً پوشش جهانی دارد. هنگامی که یک تماس تلفن همراه برقرار می شود، سیگنال تلفن همراه معمولاً به نزدیکترین برج تلفن همراه در محدوده ظرفیت ترافیک آن متصل می شود. موقعیت دکل تلفن همراه را می توان برای تخمین موقعیت مکانی کاربر تلفن همراه هنگام برقراری تماس تلفنی استفاده کرد. تقسیمات فضایی چنین شبکه های سلولی بر اساس نمودار Voronoi که هر برج سلولی در آن قرار دارد (مرکز آن) به سلول ها (منطقه ها) تقسیم می شود. یک منطقه متناظر وجود دارد که شامل تمام نقاط نزدیکتر به آن مرکز نسبت به سایر نقاط است. یعنی تمام تماسهای تلفنی در یک چند ضلعی Voronoi به برج سلولی مربوطه نزدیکتر از سایر دکلهای تلفن همراه است. بطور کلی، مناطق مرکزی شهری دارای تراکم سلول های متحرک بالاتری هستند که در آن میانگین فاصله بین ایستگاه های پایه سیار تقریباً یک کیلومتر است. مقدار میانگین تفکیک به اندازه منطقه مورد مطالعه بستگی دارد (گائو و همکاران، 2013).
وای فای:گروه کاری موسسه مهندسین برق و الکترونیک (IEEE) 802.11 استفاده استاندارد از فناوری Wi-Fi را برای فعال کردن اتصالات شبکه بی سیم در پنج محدوده فرکانسی مجزا: 2.4 گیگاهرتز، 3.6 گیگاهرتز، 4.9 گیگاهرتز، 5 گیگاهرتز و 5.9 گیگاهرتز مستند می کند. استفاده گسترده از نقاط دسترسی Wi-Fi برای اتصال به اینترنت در هتل ها، ساختمان های تجاری، کافی شاپ ها و بسیاری از مکان های ثابت دیگر، Wi-Fi را به یک فناوری جذاب برای اهداف موقعیت یابی تبدیل کرده است. همه آن روترهای Wi-Fi که در مکان های ثابت مستقر شده اند، به طور مکرر سیگنال های بی سیم را به منطقه اطراف پخش می کنند. این سیگنالها معمولاً چند صد متر در همه جهات حرکت میکنند، به طوری که میتوانند سطوح سیگنال بیسیم را تشکیل دهند و یک دستگاه میتواند سیگنالهای متمایز را در مکانهای مختلف روی سطح دریافت کند.
زاندبرگن (2009) به طور سیستماتیک سه فناوری موقعیت یابی غالب را مقایسه کرد: کمک GPS، Wi-Fi، و موقعیت یابی سلولی. مزایا و معایب آنها از نظر پوشش، دقت و قابلیت اطمینان مورد بحث قرار گرفته است. گزارش میدهد که Assisted-GPS میانگین خطای 8 متری را در فضای باز به دست میآورد در حالی که موقعیتیابی Wi-Fi تنها 74 متر از آن را دریافت میکند و موقعیتیابی سلولی به طور متوسط حدود 600 متر خطای متوسط دارد و کمترین دقت را دارد. با این حال، چیپستهای موقعیتیابی GPS به دلیل دید محدود ماهوارهای در محیطهای داخلی به خوبی کار نمیکنند. و در نتیجه تعدادی از فن آوری ها و سیستم های موقعیت یابی داخلی برای افزایش دقت موقعیت یابی داخلی طراحی و توسعه یافته اند.
3.2 فن آوری های موقعیت یابی داخلی
به طور کلی، فناوریهای موقعیتیابی داخلی را میتوان به دو دسته کلی تقسیم کرد: فناوریهای مبتنی بر فرکانس رادیویی (RF) و فناوریهای مبتنی بر فرکانس رادیویی (NRF). گروه RF شامل اما نه محدود به سیستم های WLAN، بلوتوث و RFID است، در حالی که گروه NRF شامل اولتراسوند، میدان های مغناطیسی و سیستم های مبتنی بر بینایی است. محققان با استفاده از این حسگرها و فناوری ها پیشرفت هایی در موقعیت یابی داخل ساختمان داشته اند. منطقه پوشش فضایی و دقت موقعیت یابی آن فناوری های مختلف توسط Mautz (2009) بررسی شده است. در اینجا، ما فقط به طور خلاصه در مورد فن آوری های RF که در سهم بازار محبوب ترین هستند و مسائل چالش برانگیز زیادی برای بررسی دارند صحبت می کنیم.
WLAN:سیستم های موقعیت یابی با استفاده از زیرساخت شبکه محلی بی سیم (WLAN) به عنوان راه حل های مقرون به صرفه و عملی برای تخمین و ردیابی مکان داخلی در نظر گرفته می شوند. شبکههای بیسیم بهطور گسترده در بسیاری از انواع ساختمانهای داخلی که در آنها نقاط دسترسی بیسیم معمولاً در موقعیتهای خاصی ثابت میشوند، اجرا میشوند. این نقاط دسترسی به دستگاههای بیسیم (به عنوان مثال، تلفنهای همراه، لپتاپ و تبلتها) اجازه میدهند تا با استفاده از فناوری Wi-Fi به یک شبکه سیمی متصل شوند. و فاصله نسبی بین دستگاههای بیسیم و نقاط دسترسی را میتوان بر اساس قدرت سیگنال Wi-Fi با استفاده از مدلهای انتشار سیگنال تخمین زد (Motley & Keenan، 1988). همچنین به خوبی شناخته شده است که دقت تخمین موقعیت داخلی بر اساس قدرت سیگنال Wi-Fi تحت تأثیر بسیاری از عوامل محیطی و رفتاری مانند دیوارها، درها، تنظیمات نقاط دسترسی، جهت گیری بدن انسان و غیره (فریس و همکاران، 2007). بنابراین، یک رویکرد موقعیتیابی اثر انگشت اغلب استفاده میشود، که در آن اثر انگشتهای اندازهگیری شده در حال حاضر (به عنوان مثال، نشانگر قدرت سیگنال دریافتی، RSSI) با اثرانگشتهای اندازهگیری شده قبلی در پایگاه داده مقایسه میشوند تا موقعیت فعلی تعیین شود. در کاربردهای عملی، یک تقریب خوب از سطوح سیگنال محیطی ناهمگن می تواند به بهبود دقت موقعیت یابی داخلی کمک کند. رگرسیون فضایی، یک روش تحلیل فضایی پرکاربرد در یافتن الگوهای فضایی سطوح، به طور بالقوه می تواند کاندیدای خوبی باشد. یک گردش کار ژئوپردازش برای تولید سطح سیگنال WLAN داخلی از نمونه های محدود برای موقعیت یابی توسط Gao & Prasad (2016) پیشنهاد شده است. یک رویکرد تعیین موقعیت اثر انگشت اغلب استفاده می شود، که در آن اثر انگشت اندازه گیری شده فعلی (به عنوان مثال، نشانگر قدرت سیگنال دریافتی، RSSI) با اثر انگشت های اندازه گیری شده قبلی در پایگاه داده مقایسه می شود تا موقعیت فعلی تعیین شود. در کاربردهای عملی، یک تقریب خوب از سطوح سیگنال محیطی ناهمگن می تواند به بهبود دقت موقعیت یابی داخلی کمک کند. رگرسیون فضایی، یک روش تحلیل فضایی پرکاربرد در یافتن الگوهای فضایی سطوح، به طور بالقوه می تواند کاندیدای خوبی باشد. یک گردش کار ژئوپردازش برای تولید سطح سیگنال WLAN داخلی از نمونه های محدود برای موقعیت یابی توسط Gao & Prasad (2016) پیشنهاد شده است. یک رویکرد تعیین موقعیت اثر انگشت اغلب استفاده می شود، که در آن اثر انگشت اندازه گیری شده فعلی (به عنوان مثال، نشانگر قدرت سیگنال دریافتی، RSSI) با اثر انگشت های اندازه گیری شده قبلی در پایگاه داده مقایسه می شود تا موقعیت فعلی تعیین شود. در کاربردهای عملی، یک تقریب خوب از سطوح سیگنال محیطی ناهمگن می تواند به بهبود دقت موقعیت یابی داخلی کمک کند. رگرسیون فضایی، یک روش تحلیل فضایی پرکاربرد در یافتن الگوهای فضایی سطوح، به طور بالقوه می تواند کاندیدای خوبی باشد. یک گردش کار ژئوپردازش برای تولید سطح سیگنال WLAN داخلی از نمونه های محدود برای موقعیت یابی توسط Gao & Prasad (2016) پیشنهاد شده است. RSSI) با اثر انگشت های اندازه گیری شده قبلی در پایگاه داده مقایسه می شوند تا موقعیت فعلی را تعیین کنند. در کاربردهای عملی، یک تقریب خوب از سطوح سیگنال محیطی ناهمگن می تواند به بهبود دقت موقعیت یابی داخلی کمک کند. رگرسیون فضایی، یک روش تحلیل فضایی پرکاربرد در یافتن الگوهای فضایی سطوح، به طور بالقوه می تواند کاندیدای خوبی باشد. یک گردش کار ژئوپردازش برای تولید سطح سیگنال WLAN داخلی از نمونه های محدود برای موقعیت یابی توسط Gao & Prasad (2016) پیشنهاد شده است. RSSI) با اثر انگشت های اندازه گیری شده قبلی در پایگاه داده مقایسه می شوند تا موقعیت فعلی را تعیین کنند. در کاربردهای عملی، یک تقریب خوب از سطوح سیگنال محیطی ناهمگن می تواند به بهبود دقت موقعیت یابی داخلی کمک کند. رگرسیون فضایی، یک روش تحلیل فضایی پرکاربرد در یافتن الگوهای فضایی سطوح، به طور بالقوه می تواند کاندیدای خوبی باشد. یک گردش کار ژئوپردازش برای تولید سطح سیگنال WLAN داخلی از نمونه های محدود برای موقعیت یابی توسط Gao & Prasad (2016) پیشنهاد شده است. یک روش تحلیل فضایی پرکاربرد در یافتن الگوهای فضایی سطوح، به طور بالقوه می تواند کاندیدای خوبی باشد. یک گردش کار ژئوپردازش برای تولید سطح سیگنال WLAN داخلی از نمونه های محدود برای موقعیت یابی توسط Gao & Prasad (2016) پیشنهاد شده است. یک روش تحلیل فضایی پرکاربرد در یافتن الگوهای فضایی سطوح، به طور بالقوه می تواند کاندیدای خوبی باشد. یک گردش کار ژئوپردازش برای تولید سطح سیگنال WLAN داخلی از نمونه های محدود برای موقعیت یابی توسط Gao & Prasad (2016) پیشنهاد شده است.
بلوتوث:فناوری بلوتوث که برای مصرف انرژی کم طراحی شده است، به چندین دستگاه الکترونیکی اجازه می دهد تا با استفاده از همان باند فرکانس رادیویی 2.4 گیگاهرتز مانند Wi-Fi، بدون کابل با یکدیگر ارتباط برقرار کنند. محدوده فاصله ای که موقعیت یابی بلوتوث می تواند در آن کار کند حدود 10 متر است. در حالت beaconing، پیامهای مجاز بلوتوث میتوانند برای تشخیص نزدیکی فیزیکی بین دو دستگاه استفاده شوند (Faragher & Harle, 2014). در یک محیط داخلی مجهز به چراغهای کممصرف بلوتوث (BLE) یا مساوی یا بزرگتر، میتوان با استفاده از روشهای سهلایهبندی هندسی یا موقعیتیابی اثر انگشت، مکان یک دستگاه تلفن همراه هدف با بلوتوث را تعیین کرد. به این ترتیب، محرکها، اعلانها و فعالیتهای ردیابی وابسته به مکان را میتوان با استفاده از چندین چراغ BLE فعال کرد.
شناسایی فرکانس رادیویی (RFID): RFID یک اصطلاح کلی است که برای سیستمی استفاده می شود که با استفاده از امواج رادیویی بین یک خواننده و یک برچسب الکترونیکی متصل به یک جسم ارتباط برقرار می کند. در مقایسه با فناوری بلوتوث، سیستمهای RFID معمولاً از خوانندهها و برچسبهایی تشکیل میشوند که اطلاعات نسبتاً محدودی در مورد شی مانند اطلاعات مکان و ویژگی ذخیره میکنند. این برچسب ها می توانند برای ارسال اطلاعات ذخیره شده فعال شوند، در صورتی که سیگنال را از خوانندگان RFID در آستانه های فاصله مشخصی دریافت کنند، که سپس می تواند برای تخمین موقعیت خواننده و نشان دادن اطلاعات مرتبط استفاده شود. در حال حاضر سیستم های ردیابی و موقعیت یابی RFID به طور گسترده ای برای ردیابی دارایی ها، ردیابی محموله ها در زنجیره تامین و موقعیت یابی اشیا در مکان های خرده فروشی و مراکز خرید استفاده می شود.
به دلیل تنوع حسگر و چالشهای موقعیتیابی در محیطهای مختلف داخلی، روند افزایشی به سمت ترکیب و یکپارچهسازی شبکههای حسگر متعدد برای دستیابی به پوشش مکانی و دقت موقعیتی بهتر نسبت به استفاده از یک منبع داده وجود دارد.
4. مدل سازی
LBS بیشتر برای تسهیل تصمیم گیری و فعالیت های روزانه کاربران در فضا طراحی شده است. کاربران در LBS مرکزی هستند. برای حمایت مؤثر از کاربران، LBS باید اطلاعات و خدمات مرتبط با مکان، زمینه، ویژگی ها و نیازهای یک کاربر تلفن همراه را ارائه دهد. این نوع اطلاعات در مورد کاربر ملاحظات مهمی در مسیر طراحی LBS، از جمله رابط های کاربر است (جیانگ و یائو، 2006).
4.1 مدل سازی کاربر
کاربر نقطه شروعی برای هر طراحی برنامه کاربردی LBS است و بنابراین رویکرد طراحی کاربر محور (UCD) اغلب تطبیق داده می شود. UCD که در ابتدا در علوم کامپیوتر معرفی شد، سعی می کند محصول ارائه شده را بر اساس خواسته و نیاز کاربران بهینه کند، نه اینکه آنها را مجبور کند که رفتار خود را برای سازگاری با محصول تغییر دهند. UCD حتی در LBS اهمیت بیشتری پیدا می کند زیرا کاربران LBS اغلب با فعالیت های دیگری مانند پیاده روی، رانندگی و گشت و گذار در طول استفاده از برنامه های LBS درگیر می شوند. آنهایی که با کاربران خود سازگار نیستند توسط آنها اخراج خواهند شد. سوالات اساسی در مورد کاربران در LBS شامل اینکه کاربران چه کسانی هستند. وظایف، اهداف و در نتیجه نیازهای آنها چیست؟ و ترجیحات و محدودیت های آنها چیست. در مقایسه با کاربران دیگر سیستمها و برنامههای GIS،
مدل کاربر مجموعه ای از داده های شخصی مرتبط با یک کاربر خاص است. اینکه چه داده هایی باید در نظر گرفته شوند و مدل سازی شوند به برنامه های کاربردی بستگی دارد. درک کامل و مدل سازی هر کاربر و نیازهای او کار آسانی نیست، زیرا کاربران معمولاً بسیار متنوع هستند. دسته بندی کاربران از نظر پروفایل های شخصی، علایق و رفتارها اغلب هنگام توسعه برنامه های LBS به کار می رود. به عنوان مثال، برای طراحی یک برنامه LBS برای یک موزه، کاربران را می توان از نظر سبک های تماشا و علایق طبقه بندی کرد (جیانگ و یائو، 2006): کاربران پرشوری که به اطلاعات عمیق در مورد هر نمایشگاه نیاز دارند، کاربران انتخابی که می خواهند جزئیات بیشتری داشته باشند. اطلاعات مربوط به نمایشگاه انتخابی و کاربران گذرا که در گالری حرکت می کنند و به شدت درگیر آنچه می بینند نمی شوند. بر اساس طبقه بندی کاربران،
اطلاعات مربوط به کاربران را می توان به صورت دستی توسط خود کاربران در هنگام استفاده (اول) از برنامه ارائه کرد، به طور خودکار از رفتارهای (گذشته) آنها یا تعامل با برنامه یاد گرفت، یا از طریق یک رویکرد ترکیبی دریافت کرد. در حالی که روش اول میتواند به سرعت دادههای اصلی کاربران را جمعآوری کند، فاقد توانایی سازگاری خودکار با تغییرات در علایق و نیازهای کاربران است. روش دوم مستقیماً از کاربران اطلاعات شخصی و ترجیحات آنها را نمیپرسد، بلکه علایق و نیازهای کاربران را با تفسیر رفتار آنها استنباط میکند. قادر است تغییرات نیازهای کاربران را به تصویر بکشد. با این حال، این روش مستلزم آن است که سیستم قبل از اینکه بتواند نیازهای کاربران را با دقت کافی مدلسازی کند، مقدار مشخصی از داده ها را جمع آوری کند. رویکرد ترکیبی آمیزهای از این روشها است و سعی در تلفیق مزایای آنها دارد.
4.2 مدل سازی مکان
همانطور که از اصطلاح نشان می دهد، مکان نقش اساسی در حوزه LBS ایفا می کند. پرسشهای رایج در LBS، مانند «من کجا هستم»، «نزدیکترین رستوران چینی چیست»، و «چگونه به X برسم» براساس مکان اشیاء فیزیکی، خدمات یا افراد است. مدلهای مکان ابزاری برای استدلال فضایی معمولاً مبتنی بر مختصات فراهم میکنند، بهعنوان مثال، برای تعیین اینکه آیا یک مختصات در محدوده معینی قرار دارد یا کدام مختصات نزدیک است، و همچنین روابط توپولوژیکی (مثلاً همپوشانی یا مهار) بین اشیاء فضایی، با تعریف رسمی توپولوژی با استفاده از چارچوب روابط فضایی توپولوژیکی مجموعه نقطه ای (Egenhofer، 1991)، حساب اتصال منطقه (RCC) (Randell et al., 1992)، یا مدل 9-تقاطع گسترش یافته (کلمنتینی و همکاران، 1993) . یک مکان را می توان به صورت مختصات هندسی نشان داد (به عنوان مثال، چند مختصات گزارش شده توسط GPS در سیستم مرجع WGS-84)، یا مختصات نمادین (به شکل نمادهای انتزاعی، به عنوان مثال، آدرس پستی، نام مکان، یا شماره اتاق). مختصات هندسی، همانطور که اکثر GIS های موجود اتخاذ می کنند، امکان محاسبه فاصله مستقیم و محاسبات روابط توپولوژیکی را فراهم می کند. بر خلاف آنچه در مختصات هندسی، فاصله و روابط توپولوژیکی بین دو مختصات نمادین به صراحت تعریف نشده است. با این حال، بازنماییهای نمادین بیشتر با روشی که عموم مردم برای بیان مکانها و ویژگیهای فضایی در گفتگوهای انسانی استفاده میکنند، همخوانی دارند. امکان محاسبه فاصله مستقیم و محاسبات روابط توپولوژیکی. بر خلاف آنچه در مختصات هندسی، فاصله و روابط توپولوژیکی بین دو مختصات نمادین به صراحت تعریف نشده است. با این حال، بازنماییهای نمادین بیشتر با روشی که عموم مردم برای بیان مکانها و ویژگیهای فضایی در گفتگوهای انسانی استفاده میکنند، همخوانی دارند. امکان محاسبه فاصله مستقیم و محاسبات روابط توپولوژیکی. بر خلاف آنچه در مختصات هندسی، فاصله و روابط توپولوژیکی بین دو مختصات نمادین به صراحت تعریف نشده است. با این حال، بازنماییهای نمادین بیشتر با روشی که عموم مردم برای بیان مکانها و ویژگیهای فضایی در گفتگوهای انسانی استفاده میکنند، همخوانی دارند.
مدلسازی مکان در LBS عمدتاً با نمایش موقعیت فعلی کاربران و همچنین نشان دادن فضای جغرافیایی و مکان برای برنامههای LBS سر و کار دارد. برای نشان دادن موقعیت کاربران، مختصات هندسی جهانی (یعنی مختصات WGS-84 گزارش شده توسط GPS) اغلب برای کاربردهای LBS در فضای باز استفاده می شود، در حالی که LBS داخلی اغلب از مختصات هندسی در برخی از سیستم های مرجع محلی یا حتی مختصات نمادین استفاده می کند (به عنوان مثال، شماره اتاق به عنوان 8028). برای پشتیبانی از پرس و جوهای مختلف در LBS، فضای جغرافیایی نیز باید به طور موثر مدل شود. در حالی که دادههای مکانی موجود، لایههای داده پایه (مانند دادههای توپوگرافی و دادههای شبکه جادهای) را فراهم میکنند، بسته به کاربردهای خاص LBS به منابع داده بیشتری نیاز است. برای مثال، برای برنامههای LBS که برای راهنمایی گردشگران طراحی شدهاند، تمام جاذبههای فیزیکی (نقاط دیدنی، به عنوان مثال، موزهها، مکان ها و پارک های تاریخی) و اطلاعات مربوط به آنها باید ذخیره شود. در یک محیط داخلی، استفاده ترکیبی از نمودار اتصال مبتنی بر توپولوژی و نقشه ساختار داخلی میتواند مدلسازی مکان و ناوبری را تسهیل کند (Yang & Worboys، 2015). علاوه بر این اطلاعات ثابت، گاهی اوقات برنامه های LBS همچنین نیاز به دسترسی به اطلاعات مربوط به اشیاء تلفن همراه (به عنوان مثال، مکان دوستان کاربر) یا پدیده های پویا (به عنوان مثال، رویدادهایی که در یک شهر اتفاق می افتد یا خواهند افتاد) دارند. در سالهای اخیر، برنامههای کاربردی جدید نیازمندیهای جدید بسیاری را برای مجموعه دادههای مکانی سنتی ایجاد کردهاند. به عنوان مثال، برنامههای LBS فعلی که برای ناوبری خودرو طراحی شدهاند، اغلب به اطلاعات ترافیکی در زمان واقعی و حتی نقشههای جادهای با دقت بالا در زمان واقعی با علائم دقیق نیاز دارند.
4.3 مدل سازی زمینه
در مقایسه با سایر برنامه های GIS، LBS اغلب قادر به تشخیص زمینه ای است که در آن مورد استفاده قرار می گیرد و محتویات، رابط و رفتار سیستم خود را بر این اساس تطبیق می دهد. به عبارت دیگر، آگاهی از زمینه نقش اساسی در LBS ایفا می کند. دی تعریف گسترده ای از زمینه ارائه کرد: «زمینه هر اطلاعاتی است که می تواند برای توصیف وضعیت یک موجودیت استفاده شود. موجودیت به شخص، مکان یا شیئی گفته می شود که با تعامل بین کاربر و یک برنامه کاربردی مرتبط در نظر گرفته می شود» (دی، 2001، ص 5). از این نظر، مکان و کاربر بخشهایی از زمینه هستند، با این حال، بیشتر از مکان و کاربر در زمینه وجود دارد.
مطالعات مختلف تلاش کرده اند تا انواع مختلف عوامل زمینه ای را که به طور بالقوه به یک کاربر LBS مرتبط هستند، شناسایی کنند. به عنوان مثال، نیوالا و همکاران. (2003) یک طبقه بندی از عوامل زمینه ای را پیشنهاد کرد که باید در هنگام توسعه LBS مبتنی بر نقشه در نظر گرفته شوند، به عنوان مثال، LBS که اطلاعات و خدمات را از طریق ابزارهای نقشه برداری ارائه می دهد. آنها 9 نوع عامل زمینه را شناسایی کردند: کاربران (به عنوان مثال، پروفایل های کاربری و ترجیحات آنها)، مکان فعلی ، زمان (به عنوان مثال، زمان روز، روز هفته، ماه ها، فصل ها)، جهت گیری (یعنی جهتی که کاربر در حال حرکت است. ؛ در راهنمای توریستی می توان از آن برای تعیین اینکه کاربر با چه بنای تاریخی روبروست، تاریخچه ناوبری استفاده کرد(به عنوان مثال، جایی که کاربر بوده است، و آنچه که دیده و انجام داده است)، هدف از استفاده (به عنوان مثال، فعالیت ها، اهداف و نقش های کاربران)، جنبه های اجتماعی و فرهنگی (به عنوان مثال، افرادی که با کاربر هستند، روابط اجتماعی) محیط فیزیکی ( به عنوان مثال، نور، دما، شرایط آب و هوایی، سطح نویز و چشم انداز اطراف)، و دستگاه (به عنوان مثال، نوع دستگاه، اندازه نمایشگر، روش ورودی، اتصال به شبکه). این نوع طبقه بندی ساختارهایی را برای در نظر گرفتن عوامل زمینه ای فراهم می کند. عوامل زمینه ای که باید در نظر گرفته شوند و مدل سازی شوند به کاربردهای خاص LBS بستگی دارد (هوانگ و گارتنر، 2009).
شکل 2. انواع مختلف عوامل زمینه ای که ممکن است با LBS مرتبط باشند (Steiniger و همکاران (2006) در CartouCHe تحت CC BY 2.0)
پس از شناسایی عوامل زمینهای که باید در نظر گرفته شوند، برنامههای LBS باید دادههای این عوامل را جمعآوری کنند تا زمینه (موقعیتی) را که کاربر در حال حاضر در آن قرار دارد، شناسایی کند. ، وضعیت آب و هوا را می توان از طریق API های سرویس آب و هوای آنلاین به دست آورد)، یا از حسگرهای مختلف در دستگاه های تلفن همراه یا در محیط (به عنوان مثال، داده های مربوط به مکان، زمان و جهت گیری فعلی را می توان از حسگرهای دستگاه های تلفن همراه جمع آوری کرد). گاهی اوقات، دادههای خام سطح پایین، بهویژه خروجیهای حسگر عددی، اغلب انتزاع میشوند و به اطلاعات زمینه یا فعالیت سطح بالا تبدیل میشوند (مثلاً «رانندگی»).
4.4 یکپارچه سازی
برای وضوح و راحتی، تکنیکهای مدلسازی فوق را در رابطه با کاربر، مکان و زمینه به صورت جداگانه معرفی میکنیم. با این حال، باید توجه داشت که این جنبه ها جدایی ناپذیر و به هم مرتبط هستند و باید در فرآیند مدل سازی و طراحی برای هر برنامه کاربردی LBS یکپارچه شوند. به عنوان مثال، توسعه یک برنامه LBS برای حمایت از گردشگران شهری باید تمام این جنبه ها را در نظر گرفته و مدل سازی کند، و محتوا و ارائه آن را مطابق با آن تطبیق دهد.
چندین موضوع دیگر نیز باید در فرآیند مدلسازی در نظر گرفته شود. اولاً، LBS اغلب در محیطهای پویا و متحرک استفاده میشود، که به این معنی است که مدلهای دینامیک مربوط به کاربر، مکان و زمینه باید اتخاذ شود. دوم، همانطور که از بالا مشاهده می شود، بسیاری از داده های ارائه شده در این مدل ها حاوی اطلاعات شخصی و حساس هستند و بنابراین نگرانی های مربوط به حریم خصوصی اغلب مطرح می شود. طراحان LBS اغلب باید تعادلی بین حریم خصوصی و کیفیت مدل پیدا کنند.
5. ارتباط و سازگاری
از دیدگاه کاربر، برنامه های کاربردی LBS اطلاعات مربوطه را از طریق دستگاه های تلفن همراه برای پشتیبانی از تصمیم گیری و فعالیت های او در فضا ارائه می دهند. این را می توان به عنوان یک فرآیند ارتباطی در نظر گرفت که در آن اطلاعات (مکانی) مرتبط از برنامه های LBS به کاربران منتقل می شود. در این فرآیند باید به دو سوال اساسی پاسخ داده شود: چه اطلاعاتی باید به کاربر منتقل شود و در کدام فرم های ارائه. پاسخ به این سوالات بسیار به کاربر، مکان و زمینه بستگی دارد. در این قسمت ابتدا به معرفی فرم های مختلف ارائه که برای برنامه های LBS پیشنهاد شده است می پردازیم. سپس در مورد تکنیک های سازگاری در LBS بحث خواهیم کرد.
5.1 فرم ها و رابط های ارتباطی
مانند ارتباطات انسانی، اطلاعات در LBS می تواند به اشکال مختلف مانند گرافیکی، شفاهی و لمسی به کاربران خود منتقل شود. در میان آنها، نقشه ها، به عنوان یک فرم گرافیکی، محبوب ترین آنها در LBS هستند. در ادامه چندین فرم ارائه اصلی بکار رفته در LBS را معرفی می کند.
نقشه های موبایل: نقشه ها به طور کلی مهمترین فرم ارائه هنگام برقراری ارتباط اطلاعات جغرافیایی ارجاع شده هستند. این برای LBS نیز صدق می کند، زیرا بسیاری از سوالاتی که برنامه های کاربردی LBS سعی می کنند به آنها پاسخ دهند، مربوط به جغرافیا هستند. به عنوان مثال، نقشه های “You-Are-Here” اغلب در LBS برای پاسخ دادن به سوالاتی مانند “من کجا هستم” و “اینجا در اطراف من چیست” استفاده می شود. در حالی که نماهای نقشه بر اساس نقشه های همه منظوره مانند نقشه های گوگل یا نقشه خیابان باز اغلب استفاده می شود، انواع دیگری از نقشه ها نیز پیشنهاد می شوند، مانند نقشه های شماتیک (مانند نقشه لوله لندن)، پلان طبقه (مثلاً برای برنامه های داخلی) و سه بعدی. نقشه ها. یکی از محدودیتهای اصلی طراحی هنگام استفاده از نقشهها در LBS، اندازه صفحه نمایش کوچک و عملکرد فنی محدود دستگاههای تلفن همراه (به عنوان مثال، تلفنهای هوشمند و حتی ساعتهای هوشمند در سال اخیر) است. این امر انگیزه تحقیقات زیادی در رشته نقشه برداری برای تعریف و ارائه اصول، قوانین، روش ها و تکنیک های نقشه برداری (بهبود یا جدید) برای طراحی نقشه موبایل می شود. لطفا تاپیک رو ببینیدطراحی رابط کاربری و تجربه کاربری (UI/UX) برای جزئیات بیشتر.
واقعیت افزوده: AR یک فناوری رابط جدید است که اطلاعات تولید شده توسط رایانه (به عنوان مثال، تصاویر یا متون) را بر روی دیدگاه کاربر از دنیای واقعی قرار می دهد و بنابراین یک نمای “افزوده” ارائه می دهد. در سال های اخیر، AR به یک فرم ارائه محبوب در بسیاری از برنامه های LBS تبدیل شده است. به عنوان مثال، یک بازی محبوب مبتنی بر مکان به نام “Pokemon Go” از این فناوری برای نمایش موجودات مجازی در نمای دوربین از محیط دنیای واقعی در تلفن های هوشمند استفاده می کند. برخی از برنامه های کاربردی LBS که برای ناوبری و راهیابی طراحی شده اند نیز از AR استفاده می کنند و اطلاعات مسیر را بر روی نمای دوربین دنیای واقعی قرار می دهند (Huang et al., 2012). هنگام استفاده از AR در برنامه های LBS، از حسگرهای روی گوشی های هوشمند یا سایر دستگاه های تلفن همراه مانند GPS، مغناطیس سنج و شتاب سنج برای محاسبه موقعیت و جهت گیری دستگاه ها استفاده می شود.
شکل 3. تصویری از رابط مبتنی بر AR برای پیمایش عابر پیاده در فضای باز، با نمای دوربین دنیای واقعی، پوشش مسیر، نام خیابان ها و نشانه های مربوطه.
توصیفات شفاهی: اطلاعات در برنامه های LBS نیز می تواند از طریق توضیحات شفاهی به کاربران منتقل شود. این نوع توصیفات کلامی اغلب به صورت شفاهی و اغلب با سایر اشکال ارائه مانند نقشه ها ترکیب می شوند. به عنوان مثال، سیستمهای ناوبری خودرو، که محبوبترین برنامههای LBS هستند، دستورالعملهای مسیر را به صورت شفاهی به کاربران خود منتقل میکنند، در حالی که همزمان از نقشههای موبایل برای نمایش یک نمای کلی از محیط اطراف استفاده میکنند. برخی از مزایای توصیف های شفاهی این است که به منابع فنی کمتری نیاز دارند و توجه بصری کاربران را نمی طلبند. بنابراین برای انتقال اطلاعات به کاربران کم بینا بسیار مفید هستند. با این حال، ارتباط کلامی می تواند به راحتی تحت تأثیر محیط قرار گیرد و محدود شود. به عنوان مثال، کاربران برای شنیدن توضیحات کلامی در یک محیط بسیار پر سر و صدا به چالش کشیده می شوند.
بازخورد لمسی : بازخورد لمسی یا لمسی، مانند ارتعاش در گوشیهای هوشمند، کمتر به صورت مستقل استفاده میشود، اما بیشتر با سایر اشکال ارتباطی ادغام میشود تا تجربیات و عملکرد کاربران را با برنامههای LBS افزایش دهد. می توان از آن برای جلب توجه کاربر و همچنین به عنوان وسیله ای برای انتقال اطلاعات خاص استفاده کرد. به عنوان مثال، ارتعاشات توسط بسیاری از سیستم های ناوبری عابر پیاده استفاده می شود تا کاربر را از نقطه تصمیم گیری که در آن نیاز به تغییر جهت ایجاد کند، مطلع می کند. برخی از سیستم ها نیز از الگوها و شدت های مختلف ارتعاش برای نشان دادن گردش به چپ یا راست استفاده می کنند.
5.2 سازگاری
همانطور که در بالا ذکر شد، برنامه های کاربردی LBS باید اطلاعات مربوطه را در یک فرم ارائه درست مطابق با مکان، زمینه، ویژگی ها و نیازهای یک کاربر تلفن همراه ارائه دهند. برای شناسایی “چه اطلاعاتی مرتبط است” و “چگونه اطلاعات مربوطه باید ارائه شود”، طراحان LBS اغلب نیاز به استفاده از رویکرد تجربی و کاربر محور دارند، به عنوان مثال، با تجزیه و تحلیل دقیق نیازهای اطلاعاتی کاربران. یافتههای حوزههای تحقیقاتی شناخت (فضایی) و ارگونومی (یعنی عوامل انسانی) نیز ادغام شدهاند.
دو راه مختلف برای تطبیق محتوا و ارائه در LBS وجود دارد: سازگار و تطبیقی. این طبقه بندی تمایز بین فرآیند انطباق به صورت دستی و خودکار است. سیستمهای قابل تطبیق، کاربران را قادر میسازد تا خدمات (به عنوان مثال، محتوا و سبکهای ارائه) را خودشان سفارشی کنند. مزیت این رویکرد این است که “کاربر سیستم را در کنترل دارد”، در حالی که نقطه ضعف آن این است که “کاربر باید کارهایی (قابل توجه) انجام دهد.” در مقابل، سیستم های تطبیقی خدمات خود را به طور خودکار مطابق با داده های مدل سازی شده در مورد کاربر و زمینه تطبیق می دهند. مزیت “کم (یا بدون) تلاش کاربر است، در حالی که ضعف “از دست دادن کنترل” را دارد. با توجه به این واقعیت که کاربران LBS اغلب در هنگام استفاده از دستگاه های تلفن همراه درگیر بسیاری از وظایف و فعالیت ها هستند، همچنین اندازه صفحه نمایش کوچک و عملکرد تعامل محدود دستگاه های تلفن همراه،
6. برنامه های کاربردی
LBS با پیشرفت بسیاری از پروژه ها و محصولات تحقیقاتی (Schiller & Voisard, 2004)، از جمله ناوبری و مسیریابی (به عنوان مثال، HERE WeGo)، ردیابی اشیا، راهنماهای شهر/موزه (به عنوان مثال، “I amsterdam Maps & Routes) به سرعت در حال تحول هستند. ”)، مدیریت اضطراری، بازاریابی (به عنوان مثال، تبلیغات مبتنی بر مکان)، تجزیه و تحلیل ورزشی، سرگرمی (به عنوان مثال، بازی های مبتنی بر مکان، مانند Pokemon Go و همچنین موارد در حال ظهور از جمله اشتراک گذاری سواری (به عنوان مثال، Uber، Lyft، و Didi)، مراقبت های بهداشتی، شبکه های اجتماعی (به عنوان مثال، Foursquare)، رسانه های اجتماعی، واقعیت افزوده (به عنوان مثال، Wikitude)، و غیره. صرف نظر از یک برنامه خاص. دامنه، برنامه های LBS تعامل بین مکان و کاربر یا بین تصمیم گیرندگان را تسهیل می کند. به عنوان مثال، نرخ اشغال بالای هر وسیله نقلیه از طریق اشتراک سواری می تواند به کاهش ترافیک کمک کند. با کمک برنامههای LBS مانند Waze و Uber، ناوبری جمعسپاری با اطلاعات تقریباً همزمان و خدمات همنشینی مبتنی بر سفر امکانپذیر میشود. با این حال، جستجو برای مکانها و مسیرهای تعامل بالقوه که شامل افراد متعدد با محدودیتهای فضا-زمانی و مشارکت فعالیتهایشان میشود، همچنان یک چالش باقی میماند (وانگ و همکاران، 2018). این نیاز به توسعه بیشتر ابزارها، روش ها،
رسانه های اجتماعی مبتنی بر مکان به سرعت در حال رشد هستند. متون، شکل ها و ویدیوهای دارای برچسب جغرافیایی به طور گسترده در منابع متعددی مانند فیس بوک، توییتر، اینستاگرام و فلیکر توزیع می شوند. این مطالب دارای برچسب جغرافیایی به طور گسترده در حوزه های تحقیقاتی از جمله تجزیه و تحلیل تحرک/ مهاجرت انسان، تشخیص رویدادها، هوش تجاری، اپیدمیولوژی و غیره استفاده می شود. به طور کلی، دو نوع محتوای LBS وجود دارد: «در مکان (محلی)» و «درباره مکان (ذکر)». نوع اول به آن دسته از ورودی های دارای برچسب جغرافیایی اشاره دارد که در آن مکان جغرافیایی پست می شوند، در حالی که نوع دیگر لزوماً در آن مکان جغرافیایی ایجاد نمی شود که افراد فقط نظرات یا تجربیات خود را به اشتراک بگذارند.
7. ارزیابی مستمر و چالش ها
LBS در زندگی روزمره ما بیشتر و بیشتر محبوب شده است. چندین روند را می توان از تحقیق و توسعه صنعتی در سال های اخیر مشاهده کرد، به ویژه در مورد، به عنوان مثال، افزایش تقاضا در گسترش LBS از فضای باز به داخل و مخلوط محیط های بیرونی/داخلی، از موقعیت مکانی تا آگاه به زمینه، از سیستم های ناوبری و موبایل. راهنمای برنامههای کاربردی متنوعتر (مثلاً تبلیغات، سرگرمی/بازی، حملونقل و مراقبتهای بهداشتی)، از نقشهها و صوت فقط تا رابطهای متنوعتر و «طبیعی»، و همچنین از فناوریمحور تا تحقیقات بینرشتهای. این روندها در سال های آینده ادامه خواهند داشت و LBS را در بسیاری از جنبه های زندگی روزمره ما هوشمندتر و فراگیرتر می کند.
چالشهای متعددی نیز در حوزه LBS وجود دارد، مانند دقت موقعیتیابی، کیفیت محتوا، سازگاری با رابطهای کاربری جدید و حریم خصوصی. حریم خصوصی چالش اصلی در توسعه LBS است. LBS در طبیعت اطلاعات مرتبط را با استفاده از موقعیت مکانی و ترجیحات فعلی و همچنین زمینه ای که کاربران در آن قرار دارند به کاربران ارائه می دهد. برای رسیدگی به این نگرانیهای مربوط به حریم خصوصی، راهحلهای فنی مختلفی مانند K-Anonymity و مبهمسازی پیشنهاد شدهاند (به مبحث حریم خصوصی مکان مراجعه کنید برای جزئیات بیشتر). بسیاری از سازمانهای دولتی و انجمنهای صنعتی نیز شروع به منظم کردن رسیدگی به دادههای حساس خصوصی به شیوهای قانونی کردهاند، به عنوان مثال، “دستورالعمل حریم خصوصی و ارتباطات الکترونیکی 2002/58/EC”. با این حال، سوال در مورد انطباق با نگرانی های حریم خصوصی کاربران LBS همچنان یک چالش اصلی در LBS خواهد بود. از سوی دیگر، همانطور که LBS وارد زندگی روزمره عموم مردم می شود، این موضوع نیز مسائل جدیدی را در مورد پیامدهای اجتماعی، اخلاقی، قانونی و رفتاری LBS به همراه دارد (مایکل و مایکل، 2011؛ کسلر و مک کنزی، 2018).
Bulusu, N., Heidemann, J., & Estrin, D. (2000). محلی سازی کم هزینه در فضای باز بدون GPS برای دستگاه های بسیار کوچک. ارتباطات شخصی IEEE ، 7 (5)، 28-34. DOI: 10.1109/98.878533
کلمنتینی، ای.، دی فلیس، پی، و ون اوستروم، پی. (1993، ژوئن). مجموعه کوچکی از روابط توپولوژیکی رسمی مناسب برای تعامل با کاربر نهایی. در سمپوزیوم بین المللی پایگاه های اطلاعاتی فضایی (ص 277-295). اسپرینگر، برلین، هایدلبرگ.
دی، AK (2001). درک و استفاده از متن محاسبات شخصی و همه جا حاضر ، 5 ، 4-7. DOI: 10.1007/s007790170019
Egenhofer، MJ، و Franzosa، RD (1991). روابط فضایی توپولوژیکی مجموعه نقطه ای. مجله بین المللی سیستم اطلاعات جغرافیایی، 5 (2)، 161-174. DOI: 10.1080/02693799108927841
فراگر، آر، و هارل، آر (2014، سپتامبر). تجزیه و تحلیل دقت بلوتوث کم انرژی برای کاربردهای موقعیت یابی داخلی در مجموعه مقالات بیست و هفتمین نشست فنی بین المللی بخش ماهواره ای موسسه ناوبری (ION GNSS+’14).
فریس، بی، فاکس، دی، و لارنس، ND (2007، ژانویه). WiFi-SLAM با استفاده از مدلهای متغیر پنهان فرآیند گاوسی. در مجموعه مقالات کنفرانس مشترک بین المللی هوش مصنوعی (جلد 7، ص 2480-2485).
Gao, S., Liu, Y., Wang, Y., & Ma, X. (2013). کشف جوامع تعامل فضایی از داده های تلفن همراه. Transactions in GIS , 17 (3), 463-481. DOI: 10.1111/tgis.12042
Gao, S., & Prasad, S. (2016، اکتبر). استفاده از تجزیه و تحلیل فضایی در موقعیت یابی و ردیابی فضای داخلی با استفاده از نقاط دسترسی Wi-Fi. در مجموعه مقالات هشتمین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی (ص 27-34). ACM.
Gao, S., Janowicz, K., Montello, DR, Hu, Y., Yang, JA, McKenzie, G., …Yan, B. (2017). یک روش مبتنی بر سنتز داده برای شناسایی و استخراج مناطق شناختی مبهم. مجله بین المللی علوم اطلاعات جغرافیایی , 31 (6), 1245-1271. DOI: 10.1080/13658816.2016.1273357
Gartner, G., & Huang, H. (eds.) (2017). پیشرفت در خدمات مبتنی بر مکان 2016. یادداشت های سخنرانی در اطلاعات جغرافیایی و نقشه برداری ، برلین/هایدلبرگ، اسپرینگر.
Huang, H., & Gartner, G. (2009). استفاده از تئوری فعالیت برای شناسایی پارامترهای زمینه مرتبط. در G. Gartner & K. Rehrl, (Eds.) Location Based Services and TeleCartography II . نکات سخنرانی در اطلاعات جغرافیایی و کارتوگرافی . اسپرینگر برلین هایدلبرگ، ص 35-45.
هوانگ، اچ، اشمیت، ام.، گارتنر، جی (2012). کسب دانش فضایی با نقشه های موبایل، واقعیت افزوده و صدا در زمینه ناوبری عابر پیاده مبتنی بر GPS: نتایج یک آزمایش میدانی. نقشه برداری و علم اطلاعات جغرافیایی ، 39(2)، 107-116. DOI: 10.1559/15230406392107
Hofmann-Wellenhof، B.، Lichtenegger، H.، & Collins، J. (2012). سیستم موقعیت یابی جهانی: تئوری و عمل . Springer Science & Business Media.
جیانگ، بی، و یائو، X. (2006). خدمات مبتنی بر مکان و GIS در چشم انداز. کامپیوترها، محیط زیست و سیستم های شهری ، 30 ، 712-725. DOI: 10.1016/j.compenvurbsys.2006.02.003
Keßler, C., & McKenzie, G. (2018). مانیفست حریم خصوصی جغرافیایی معاملات در GIS , 22 (1), 3-19. DOI: 10.1111/tgis.12305
Mautz, R. (2009). مروری بر سیستم های موقعیت یابی فعلی داخلی Geodezija ir kartografija , 35 (1), 18-22. DOI: 10.3846/1392-1541.2009.35.18-22(لینک خارجی است)
مایکل، کی، و مایکل، ام جی (2011). پیامدهای اجتماعی و رفتاری خدمات مبتنی بر مکان. مجله خدمات مبتنی بر مکان , 5 (3-4), 121-137. DOI: 10.1080/17489725.2011.642820
Motley، AJ، و Keenan، JMP (1988). پوشش رادیویی ارتباط شخصی در ساختمان ها با فرکانس 900 مگاهرتز و 1700 مگاهرتز. نامه های الکترونیک، 24 (12)، 763-764. DOI: 10.1049/el:19880515
نیوالا، A.-M. و سارجاکوسکی، LT (2003). رویکردی به نقشه های هوشمند: آگاهی از زمینه ارائه شده در کارگاه “HCI در راهنمای تلفن همراه”، اودینه، ایتالیا.
Randell, DA, Cui, Z., & Cohn, AG (1992). یک منطق فضایی مبتنی بر مناطق و اتصال. در مجموعه مقالات سومین کنفرانس بین المللی بازنمایی و استدلال دانش (KR’ 92) ، 165-176.
Raper, J., Gartner, G., Karimi, H., & Rizos, C. (2007). ارزیابی انتقادی خدمات مبتنی بر مکان و پتانسیل آنها. مجله خدمات مبتنی بر مکان , 1 (1), 5-45. DOI: 10.1080/17489720701584069
Schiller, J., & Voisard, A. (Eds.). (2004). خدمات مبتنی بر مکان . الزویر.
Steiniger, S., Neun, M., & Edwardes A. (2006). مبانی خدمات مبتنی بر مکان. دانشگاه زوریخ، موجود در https://www.e-cartouche.ch/content_reg/cartouche/LBSbasics/en/text/LBSbasics.pdf
وانگ، اس.، گائو، اس.، فنگ، ایکس.، موری، AT، و Zeng، Y. (2018). یک چارچوب ژئوپردازش مبتنی بر زمینه برای بهینهسازی مکان ملاقات چندین اشیاء متحرک در امتداد شبکههای جادهای. مجله بین المللی علم اطلاعات جغرافیایی ، 1-23. DOI: 10.1080/13658816.2018.1431838
یانگ، ال.، و وربویز، ام. (2015). تولید نمودارهای ناوبری برای فضای داخلی. مجله بین المللی علوم اطلاعات جغرافیایی ، 29 (10)، 1737-1756. DOI: 10.1080/13658816.2015.1041141
زاندبرگن، پی ای (2009). دقت مکان های آیفون: مقایسه GPS کمکی، WiFi و موقعیت یابی سلولی. معاملات در GIS، 13 (s1)، 5-25. DOI: 10.1111/j.1467-9671.2009.01152.x