


پردازش داده های لیدار
پردازش داده های لیدار (LIDAR) امروز مهم و کاربردی هستند و بعنوان یک روش بسیار پیشرفته در سنجش از دور محسوب می شوند.
پردازش داده های لیدار از سیستم اسکنر و لیزر لیدار (LIDAR) تشکیل شده است.:لیدار از یک سیستم کنترلر و یک فرستنده و گیرنده تشکیل شده است. اسکن در جهت عمود بر پرواز صورت میگیرد. وظیفه اسکن بر عهده آینه اسکنر میباشد (شکل 1). لیدارهایی که برای برداشت توپوگرافی مورد استفاده قرار میگیرد از طول موجEye safe مادون قرمز نزدیک (1040 تا 1060 نانومتر) استفاده میکنند. لیزر های آبی – سبز تمرکزشان روی طول موج 532 نانومتر بوده و به خاطر قابلیت نفوذ در آب برای تهیه نقشه های عمق مورد استفاده قرار میگیرند.
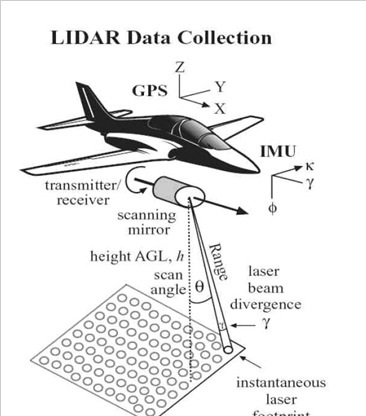
شکل 1- سیستم لیدار پالسهایی از نور لیزر را به وسیله آینه اسکن کننده به سطح زمین ارسال میکند. بخشی از این انرژی پخش شده و به سمت سنجنده برگشت خورده و به وسیله گیرنده سیستم ، ثبت و اندازه گیری میشود.سیستم ،GPS,IMU موقعیت دقیق سنجنده و هم چنین زوایای توجیه سنجنده را در لحظه که پالس لیزر ارسال و دریافت میشود،اندازه گیری میکنند.
پردازش داده های لیدار(LIDAR):لیدار با توجه به اینکه یک سیستم فعال است نیازی به نور خورشید نداشته و قادر است حتی در شب به جمع آوری اطلاعات ارتفاعی بپردازد. سیستمهای لیدار قادر هستند در هر ثانیه بیش از 100,000 پالس ارسال کنند. پالس نور لیزر سرعتی معادل سرعت نور ( clip_image004[1]) دارند.
تکنولوژی لیدار بر اساس اندازه گیری دقیق زمان طی پالس لیزر از فرستنده تا تارگت و سپس از تارگت به سمت گیرنده، کار میکنند. زمان طی پالس لیزرt به صورت زیر میباشد :
clip_image006[1]که در رابطه بالا R فاصله سنسور تا عارضه میباشد . R فاصله سنسور تا عارضه با باز چینی رابطه بالا به صورت زیر ظاهر میشود :
clip_image008[1]
پروسه اندازه گیری فواصل منجر به تولید نقاط ارتفاعی می شودکه به صورت سیستماتیک در طول خط پرواز و عمود بر آن قرار میگیرند(شکل 2 ).
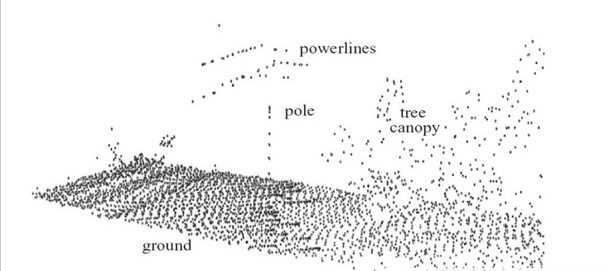
شکل 2 – اطلاعات مسطحاتی و ارتفاعی ثبت شده توسط لیدار را نشان میدهد.که نقاط Mass points نامیده میشوند. برخی از این نقاط روی سطح زمین و برخی دیگر روی عوارضی چون: درخت و گیاهان و ساختمان و غیره قرار دارد.
رد پای لیزر در سطح زمین بسته به ناهمواری زمین و زاویه اسکن، تقریبا به صورت دوایری ظاهر میشوند. قطر رد پای لحظه ای لیزر در سطح زمین در شکل 1 به صورت زیر محاسبه میشود:
clip_image012[1]
در این رابطه h ارتفاع متوسط سنجنده از سطح زمین، clip_image014[1] زاویه اسکن لحظه مورد بررسی، clip_image016[1]دیورژانس بیم لیزر است.
عرض برداشت پهلونگر (SW) به صورت زیر محاسبه میشود :
clip_image018[1]
clip_image020[1] زاویه اسکن میباشد .
فواصل بین نقاط پهلونگر (clip_image022[1]) ، با داشتن فرکانس تکرار پالس(PRF) ، ارتفاع سنجنده(h) ، سرعت اسکن زاویه ای لحظه ای(clip_image024[1]) به صورت رادیانس در ثانیه و زاویه اسکن لحظه ای (clip_image026[1]) به صورت زیر محاسبه میشود:
clip_image028[1]clip_image030[1]
چگالی نمونه های واقعی برای یک ناحیه به سرعت پیش روی سنجنده بستگی دارد . تراکم داده های لیدار از یک نقطه در 20 متر مربع تا 20 نقطه در یک متر مربع در ارتفاع پرواز 1000 متر، متنوع است. در صورتی که به تراکم بالایی نیاز باشد لازم است تا خطوط پرواز در یک مسیر چند بار تکرار شود.
زاویه off-nadir بیشینه میتواند برای تهیه اطلاعات مورد نیازپروژه ، تعدیل شود. شکل 3 نشان میدهد که با فرض یک دست بودن ارتفاع و تراکم پوشش گیاهی ، با افزایش زاویه اسکن از نادیر ، قادر است تا از پوشش گیاهی عبور کرده و نقاط ارتفاعی از سطح عریان زمین برای تولید DTM را فراهم کند. داده های لیدار میتواند برای تهیه مدل رقومی ارتفاعی زمین عریان و یا هم چنین تهیه مدل رقومی سطح مورد استفاده قرار گیرد.
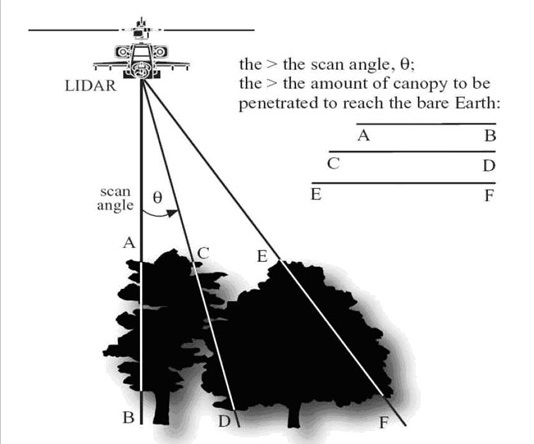
شکل 3 – با فرض یک دست بودن ارتفاع و تراکم پوشش گیاهی، با افزایش زاویه اسکن از نادیر ، قادر است تا از پوشش گیاهی عبور کرده و نقاط ارتفاعی از سطح عریان زمین برای تولید DTM فراهم کند.

پردازش داده های لیدار(LIDAR):لیدار مشکلات مثلث بندی هوایی و ترمیم قائم (Ortho Rectification) را ندارد. دلیلش این است که دادهها در حین جمع آوری ، زمین مرجع شدهاند. ولی به هر حال پردازشهایی برای تبدیل فاصله اندازه گیری شده توسط لیدار به نقاط مختصات دار نیز لازم است. مهمترین متغیرهایی که به پردازش نیاز دارند عبارتند از:
موقعیت x,y,zدر لحظه ای که پرتو لیزر ارسال و در یافت میشود.
ارتفاع و توجیه سنجنده لیدار در زمانی که پرتو لیزر ارسال و در یافت میشود.
زاویه اسکن در زمانی که پرتو لیزر ارسال و در یافت میشود.
اثر انکسار و اتمسفر روی سرعت پرتو لیزر ارسالی
زمان طی شده بین لحظه ارسال و دریافت پرتو لیزر