

خلاصه
کلید واژه ها:
درون یابی ; حمام سنجی رودخانه ; پژواک تک پرتو ; مقطع رودخانه ; رودخانه سیرت
1. معرفی
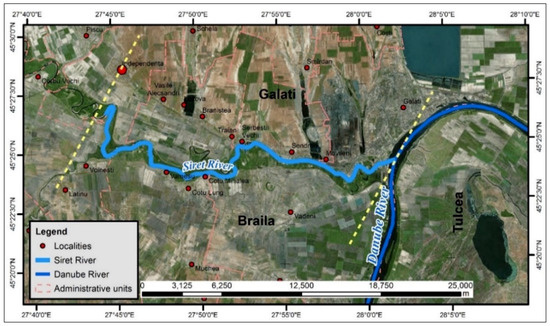
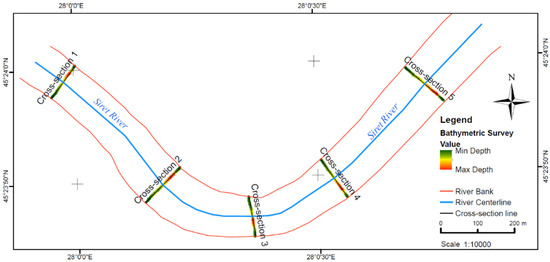
منطقه مطالعه
پژواک تک پرتو (SBES) رایج ترین ابزار مورد استفاده در بنادر و در بررسی دریاچه ها و رودخانه ها است، زیرا ابزاری کارآمد، کم هزینه و در دسترس است. SBES از اندازهگیریهای عمق آکوستیک استفاده میکند، که بر اساس اندازهگیری زمان سپری شده که یک پالس صوتی برای حرکت از مبدل به پایین و عقب آبراه طول میکشد، انجام میشود. فرمول کلی عمق تصحیح شده توسط [ 23 ] ارائه می شود:
جایی که: d = عمق تصحیح شده. v = سرعت متوسط صوت در آب. t = زمان از مبدل به پایین و عقب. k = ثابت شاخص سیستم. d r = فاصله از سطح آب مرجع تا مبدل.
2. مواد و روشها
2.1. مواد
2.2. مواد و روش ها
2.2.1. وزن معکوس فاصله (IDW)
IDW یک مدل درونیابی فضایی قطعی را نشان می دهد، بر اساس این فرض که مقدار در یک نقطه نمونه برداری نشده را می توان با میانگین وزنی مقادیر مشاهده شده در یک محله جستجوی دایره ای تقریب زد [ 31 ]. شعاع دایره جستجو با محدوده تعداد ثابتی از نزدیکترین نقاط تعریف می شود. در بیشتر موارد، وزنهای مورد استفاده برای میانگینگیری مقدار دادهها تابعی کاهشی از فاصله بین نقاط نمونهبرداری شده و نمونهبرداری نشده است [ 32 ، 33 ، 34 ]. معادله کلی مورد استفاده IDW به منظور تخمین یک مقدار در یک نقطه نمونه برداری نشده به صورت زیر است:
که در آن Z i (i = 1، 2، …، N) مقادیر در N نقطه اندازه گیری می شود و λ i توسط:
که در آن d i فاصله بین نقطه نمونه برداری شده ( z i ) و نقطه نمونه برداری نشده ( z * ) است و p متغیر توان است. توان بالاتر باعث تأثیر کمتری از نقاط دور می شود و بالعکس. مقدار توان استاندارد دو است.
2.2.2. کریجینگ ساده (KRG)
کریجینگ (KRG) روشی است که در دهه 1960 توسط ریاضیدان فرانسوی Matheron [ 35 ] توسعه یافت و Coburn [ 36 ] به طور جزئی آن را مثال زد. این یک روش درونیابی زمین آماری است که در زمینه های مختلف بسیار مفید است. نقشه های تولید شده توسط این روش ظاهر بصری بسیار خوبی دارند که همگی بر اساس داده های فضایی نامنظم هستند [ 35 ]. مدل کلی این روش مبتنی بر یک μ(های) ثابت برای مجموعه داده ها و خطاهای تصادفی ε(ها) است که وابستگی مکانی دارند [ 37 ، 38 ، 39 ، 40 ]:
پیشبینی مقدار در یک موقعیت سلول جدید با جمع کردن مقادیر وزن نقاط ضرب شده با مقدار Z دادههای مورد استفاده در درونیابی انجام میشود [ 41 ]:
از آنجایی که روشی بسیار انعطافپذیر است، میتوان آن را بهطور پیشفرض مورد استفاده قرار داد یا برای مطابقت با دادهها با تعیین نزدیکترین مدل نیمهواریوگرام، آن را سفارشی کرد. نیمه واریوگرام از دو جزء تشکیل شده است: نیمه متغیر تجربی (تجربی) و مدل نظری نیمه واریوگرام [ 42 ]. نیمه واریوگرام تجربی از محاسبه واریانس هر نقطه اندازهگیری شده در برابر سایر نقاط مورد استفاده در فضاییسازی نتیجه میشود [ 43 ]:
جایی که: N j مجموعه ای از جفت مکان هایی است که با فاصله h از هم جدا شده اند . ساعت¯ساعت¯– میانگین فاصله بین جفت های متمایز N j را نشان می دهد.
روش SKRG شامل تعیین مقدار مجهول با تخمین مقادیر میانگین وزنی نقاط همسایه است [ 44 ]:
جایی که ز(س0)ز(س0)نشان دهنده مقدار تخمینی است، ز(سمن)ز(سمن)مقدار نقاط همسایه است، λمن�منضرایب وزن است که شرایط را برآورده می کند ∑نi = 1λمن= 1∑من=1ن�من=1، و ε�خطای پیش فرض تخمین است.
روش UKRG از این فرض استفاده می کند که تغییرات فضایی z به سه جزء وابسته است: ساختار مجموعه داده، یک جزء تصادفی همبسته، و یک خطای باقیمانده. این یک روش ترکیبی است، که در آن روند فضایی با سطوح چند جملهای از مرتبههای مختلف، بهصورت جهانی یا محلی [ 45 ] اندازهگیری میشود:
جایی که ز(س0)ز(س0)مقدار تخمینی متغیر مجهول را نشان می دهد، μ (س0)�(س0)تابع قطعی است و ε (س0)�(س0)تنوع تصادفی است
2.2.3. تابع پایه شعاعی (RBF)
تابع پایه شعاعی (RBF) یک روش درون یابی شبیه به خانواده کریجینگ است، اما از مشارکت تحلیل داده های فضایی فضایی از طریق واریوگرام [ 46 ] بهره نمی برد:
جایی که φ ( r )�(�)تابع پایه شعاعی است، r = ∥سمن–س0∥�=∥سمن-س0∥فاصله شعاعی بین نقطه ای است که یک مقدار s 0 جدید برای آن محاسبه می شود و نقاط با مقادیر اندازه گیری شده s i است و ω نماد وزن هایی است که باید تخمین زده شوند.
-
تابع چند چهارگانه (MQ):
φ ( r ) =(r2+σ2)1/2 _ _.�(�)=(�2+�2)1/2. -
اسپلاین صفحه نازک (TPS):
φ ( r ) =( σ+ ر )2ln ( σ+ ر ) .�(�)=(�+�)2لوگاریتم(�+�). -
اسپلاین با کشش (ST):
φ ( r ) = ln σ∗r2+ک0σ∗ r +سیه�(�)=لوگاریتم�∗�2+ک0�∗�+سیهکه در آن K 0 (x) تابع بسل اصلاح شده است.
-
اسپلاین کاملاً منظم (CRS):
θ ( r ) = –∑n = 1∞( – 1 )n( σ∗ r )2 nn ! n= ln( σ∗r2)2+E1( σ∗r2)2+سیه.�(�)=-∑�=1∞(-1)�(�∗�)2��!�=لوگاریتم(�∗�2)2+�1(�∗�2)2+سیه.که در آن E 1 (x) تابع یکپارچه سازی نمایی است و C e ثابت اویلر است.
2.2.4. درون یابی توپو به شطرنجی (TopoR)
درونیابی Topo به Raster توسط ANU (دانشگاه ملی استرالیا) توسعه داده شد، اما این روش اغلب در بسیاری از کشورها و مقالات تحقیقاتی مورد استفاده قرار می گیرد [ 55 ، 56 ]. این روش از تکنیک درون یابی دیفرانسیل محدود استفاده می کند و برای ساده کردن روش محاسباتی درون یابی محلی مانند درون یابی IDW، بدون از دست دادن تداوم سطوح به دست آمده با روش های درون یابی کریجینگ یا RBF Spline، بهینه شده است. این تفاوت به عنوان درجه اول و دوم مشتق جزئی f از روش درونیابی توصیف شده توسط معادلات زیر تعریف می شود [ 56 ]:
J 1 و J 2 باید به حداقل برسد تا حداکثر و حداقل اثر پیک (سطح بیش از حد صاف یا قله دار) از بین برود و زمین سطحی واقعی به دست آید. اگر فقط J 2 به حداقل برسد، یک سطح بسیار صاف به دست می آید و بالعکس، اگر فقط J 1 به حداقل برسد، حداکثر و حداقل پیک رخ می دهد [ 57 ]. هاچینسون [ 50 ] پیشنهاد میکند که با در نظر گرفتن وضوح سلول، مجازات زبری اعمال شود تا این اثر کاهش یابد:
3. نتایج و بحث
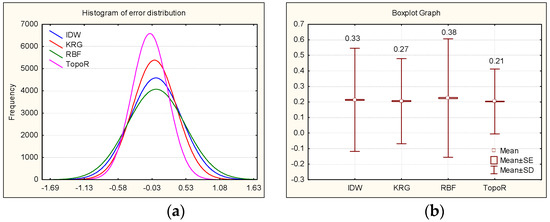
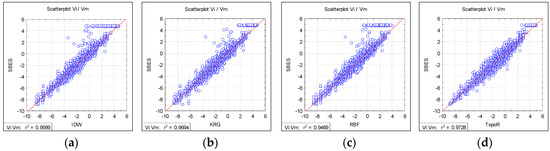
3.1. بلوک تجزیه و تحلیل عملکرد داده ها
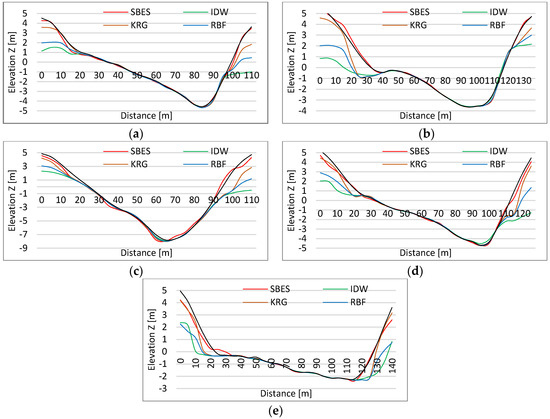
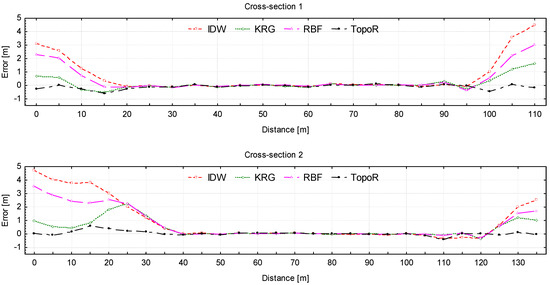
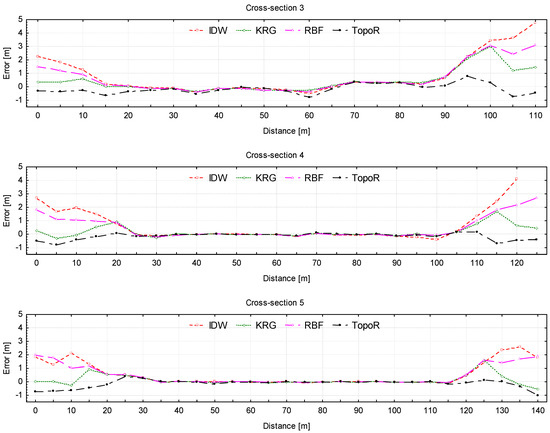
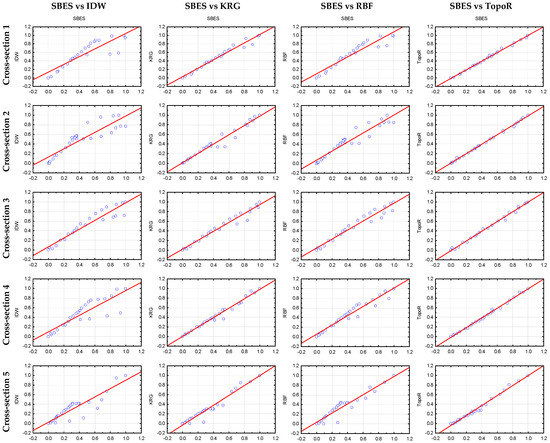
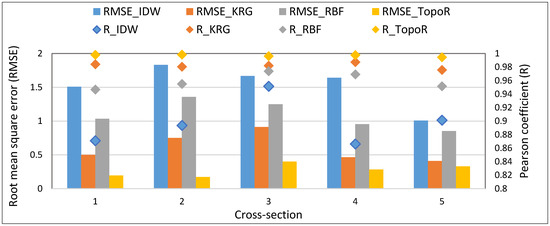
3.2. تجزیه و تحلیل عملکرد مقطع محلی
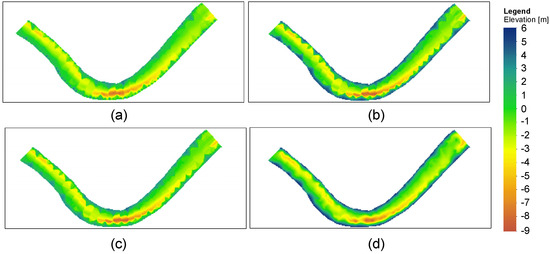
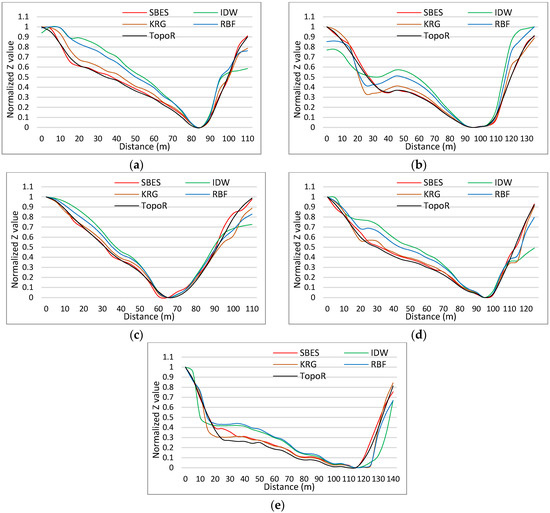
علاوه بر این، تمام داده ها با مقدار ارتفاع ( Z ) نرمال شده اند، که نشان دهنده ارتفاع کانال بستر رودخانه است. نرمال سازی با محاسبه مجدد مقادیر Z بین 0 و 1 با استفاده از فرمول زیر انجام شد:
که در آن X = (X 1 , X 2 , …, X n ) و Z i نشان دهنده i مین داده نرمال شده است.
4. نتیجه گیری
پیوست اول

ضمیمه B

منابع
- Quadros، فناوری ND در تمرکز: لیدار Bathymetric. GIM Int. جهانی Mag. Geomat. 2016 ، 30 ، 46-47. [ Google Scholar ]
- کوادروس، ن. Collier، P. ادغام LiDAR عمق سنجی و توپوگرافی: یک بررسی مقدماتی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2008 ، 36 ، 1299-1304. [ Google Scholar ]
- Kinzel، PJ; Legleiter, CJ; نلسون، JM Mapping River Bathymetry With Small Footprint LiDAR سبز: کاربردها و چالش ها. JAWRA J. Am. منبع آب دانشیار 2013 ، 49 ، 183-204. [ Google Scholar ] [ CrossRef ]
- سایلام، ک. هاپ، جی آر؛ اورت، آر. گوتلیوس، WF; Gelhar، BW Airborne lidar bathymetry: ارزیابی تضمین کیفیت و روش های کنترل کیفیت با نمونه های Leica Chiroptera. بین المللی J. Remote Sens. 2018 , 39 , 2518–2542. [ Google Scholar ] [ CrossRef ]
- فالکوفسکی، تی. اوستروفسکی، پ. تغییرات مورفولوژی کانال Siwicki، PBM و رابطه آنها با زمین شناسی پایین دره و مداخلات انسانی. مطالعه موردی از دره ویستولا در ورشو. ژئومورفولوژی 2017 ، 297 ، 100-111. [ Google Scholar ] [ CrossRef ]
- چنیر، آر. فاچر، MA; آهولا، ر. شلات، ی. ساگرام، M. فتوگرامتری Bathymetric برای به روز رسانی نمودارهای CHS: مقایسه رویکردهای دستی و خودکار سه بعدی معمولی. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 395. [ Google Scholar ] [ CrossRef ]
- چاپلوت، وی. داربوکس، اف. بورنان، اچ. Leguédois, S. دقت تکنیک های درونیابی برای استخراج مدل های ارتفاعی رقومی در رابطه با انواع شکل زمین و چگالی داده ها. ژئومورفولوژی 2006 ، 77 ، 126-141. [ Google Scholar ] [ CrossRef ]
- بنجانکار، ر. تونینا، دی. Mckean، J. مدل سازی هیدرودینامیکی یک بعدی و دو بعدی خواص جریان مشتق شده: تأثیرات بر پیش بینی کیفیت زیستگاه های آبی. زمین گشت و گذار. روند. Landf. 2015 ، 40 ، 340-356. [ Google Scholar ] [ CrossRef ]
- Kinsman، N. دادههای حمامسنجی تک پرتو جمعآوریشده در مناطق کمعمق در نزدیکی Gambell، Golovin، Hooper Bay، Savoonga، Shishmaref، و Wales، آلاسکا 2012-2013 . اداره منابع طبیعی بخش بررسی های زمین شناسی و ژئوفیزیک: فیربنکس، AK، ایالات متحده آمریکا، 2015.
- لی، جی. Heap، AD مروری بر مطالعات تطبیقی روشهای درونیابی فضایی در علوم محیطی: عوامل عملکرد و تأثیر. Ecol. آگاه کردن. 2011 ، 6 ، 228-241. [ Google Scholar ] [ CrossRef ]
- لیفنر، جی. هیوا، جی. Peel, M. حساسیت هیپسومتری حوضه و خواص هیپسومتری به وضوح DEM و نظم چند جمله ای. ژئومورفولوژی 2018 ، 309 ، 112-120. [ Google Scholar ] [ CrossRef ]
- مرواد، وی. Maidment، D. گاف، J. ملاحظات ناهمسانگرد در حین درونیابی عمق سنجی کانال رودخانه. جی هیدرول. 2006 ، 331 ، 731-741. [ Google Scholar ] [ CrossRef ]
- Merwade, V. تأثیر روندهای فضایی بر درونیابی عمق سنجی رودخانه. جی هیدرول. 2009 ، 371 ، 169-181. [ Google Scholar ] [ CrossRef ]
- پاتل، ا. کاتیار، SK; Prasad, V. ارزیابی عملکرد DEM های متن باز مختلف با استفاده از سیستم موقعیت یاب جهانی متفاوت (DGPS). مصر. J. Remote Sens. Space Sci. 2016 ، 19 ، 7-16. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گرونولد، RA; Meeden, G. اندازه گیری چولگی و کورتوزیس. JR Stat. Soc. سر. D 1984 , 33 , 391. [ Google Scholar ] [ CrossRef ]
- Bhunia، GS; شیت، پی کی; Maiti, R. مقایسه روشهای درونیابی مبتنی بر GIS برای توزیع فضایی کربن آلی خاک (SOC). J. عربستان سعودی Soc. کشاورزی علمی 2018 ، 17 ، 114-126. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آویلا، آر. هورن، بی. موریارتی، ای. هادسون، آر. Moltchanova، E. ارزیابی عملکرد مدل آماری در پیشبینی کیفیت آب. جی. محیط زیست. مدیریت 2018 ، 206 ، 910–919. [ Google Scholar ] [ CrossRef ]
- ارسنی، م. روزو، ا. نیکولای، A.-F. جورجسکو، PL; کنستانتین، دی مقایسه مدلها و تعیین حجمی دریاچه کاتوزا، گالاتی. Tehnomus J. فناوری جدید. تولید ماخ Manuf. تکنولوژی 2007 ، 24 ، 67-71. [ Google Scholar ]
- رومانسکو، جی. Stoleriu, C. علل و اثرات سیل فاجعه بار در رودخانه Siret (رومانی) در ژوئیه تا اوت 2008. Nat. خطرات 2013 ، 69 ، 1351-1367. [ Google Scholar ] [ CrossRef ]
- دااسکالیتا، دی. دانیلا، پی. اولاریو، ص. جنبه های مربوط به برخی پدیده های آب اقلیمی با خصوصیات خطر از منطقه هیدروگرافی سیرت. اقدامات ساختاری و غیرساختاری پیشگیری و اورژانس. محیط کنونی حفظ کنید. توسعه دهنده 2008 ، 1 ، 318-332. [ Google Scholar ]
- گرکو، اف. زهاریا، ال. یوانا-توریماک، جی. Armaș، I. سیلاب ها و سیلاب های ناگهانی مرتبط با دینامیک کانال رودخانه. در دینامیک و تکامل شکل زمین در رومانی ؛ Springer: Cham, Switzerland, 2017; صص 821-844. [ Google Scholar ] [ CrossRef ]
- آرسنی، م. تکنیک های مدرن GIS برای تعیین خطرات سرزمینی تکنیک های مدرن GIS برای تعیین خطرات سرزمینی. Ph.D. پایان نامه، دانشگاه “Dunarea de Jos” از گالاتی، گالاتی، رومانی، 2018. [ Google Scholar ]
- سپاه مهندسین ارتش آمریکا نقشه برداری هیدروگرافی. جلد 5 . وزارت ارتش: واشنگتن، دی سی، ایالات متحده آمریکا، 2013.
- ارسنی، م. روزو، ا. جورجسکو، LP; موراریو، جی. تکنیکهای اندازهگیری عمق آکوستیک تک پرتو و نقشهبرداری عمق سنجی برای دریاچه کاتوزا، گالاتی. ان دانشگاه Dunarea Jos Galati Fascicle II ریاضی. فیزیک نظریه. مکانیک. 2016 ، 39 ، 281-287. [ Google Scholar ]
- موراریو، جی. پوشکاسو، جی. گوگونسه، وی. آنجلوپولوس، آ. Fildisis، T. ارزیابی سیل غیر خطی با شبکه عصبی. AIP Conf. Proc. 2010 ، 1203 ، 812-819. [ Google Scholar ] [ CrossRef ]
- سازمان بین المللی هیدروگرافی (IHO). استانداردهای بررسی هیدروگرافی ، ویرایش پنجم. مشخصات انتشار شماره 44; دفتر بین المللی هیدروگرافی: موناکو، 2008. [ Google Scholar ]
- مشخصات فنی SOUTH S82V. در دسترس آنلاین: https://geo-matching.com/gnss-receivers/s82v (در 19 ژوئیه 2019 قابل دسترسی است).
- پاندی، دی. ماهارجان، بی. شالیز، دی. Shrestha، RK; Twanabasu، B. نقشه برداری دیجیتالی خاک در ناحیه بارا نپال با استفاده از ابزار کریجینگ در ArcGIS. PLoS ONE 2018 , 13 , e0206350. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- دی بورخس، PA; فرانکه، جی. da Anunciação، YMT; ویس، اچ. Bernhofer, C. مقایسه روشهای درونیابی فضایی برای تخمین توزیع بارش در Distrito Federal, برزیل. نظریه. Appl. کلیماتول. 2016 ، 123 ، 335-348. [ Google Scholar ] [ CrossRef ]
- بارو، PA; MCDonnell، RA; Lloyd, CD Principles of Geographical Information Systems , 3rd ed.; انتشارات دانشگاه آکسفورد: آکسفورد، بریتانیا، 2015. [ Google Scholar ]
- هارمن، بی. کوسو اوغلو، اچ. Yigit، CO ارزیابی عملکرد روش های درون یابی IDW، کریجینگ و چند چهارگانه در تولید نقشه نویز: مطالعه موردی در شهر اسپارتا، ترکیه. Appl. آکوست. 2016 ، 112 ، 147-157. [ Google Scholar ] [ CrossRef ]
- او، س. ژانگ، ز. یی، C. درونیابی داده های طیفی فلورسانس سه بعدی با استفاده از IDW. اسپکتروشیم. Acta Part A Mol. بیومول. Spectrosc. 2008 ، 71 ، 743-745. [ Google Scholar ] [ CrossRef ]
- لی، ام. یوان، ی. وانگ، ن. لی، ز. لیو، ایکس. Zhang، X. مقایسه آماری الگوریتمهای درونیابی مختلف برای بازسازی نقشههای یونوسفر شبکه منطقهای بر روی چین. J. Atmos. Sol.-Terr. فیزیک 2018 ، 172 ، 129-137. [ Google Scholar ] [ CrossRef ]
- ژانگ، اچ. لو، ال. لیو، ی. لیو، دبلیو. استراتژی های نمونه برداری فضایی برای اثر دقت درونیابی. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2742-2768. [ Google Scholar ] [ CrossRef ]
- Matheron, G. اصول زمین آمار. اقتصاد جئول 1963 ، 58 ، 1246-1266. [ Google Scholar ] [ CrossRef ]
- Coburn، TC; یاروس، JM; Chambers، RL مدلسازی تصادفی و زمین آمار: اصول، روش ها، و مطالعات موردی . انجمن زمین شناسان نفت آمریکا: تولسا، OK، ایالات متحده آمریکا، 2006; جلد 2. [ Google Scholar ]
- لیو، دبلیو. ژانگ، منابع انسانی؛ Yan، DP; Wang, SL مدلسازی سطح تطبیقی خصوصیات خاک در اشکال پیچیده زمین. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 178. [ Google Scholar ] [ CrossRef ]
- کرسی، ن. ریشه های کریجینگ. ریاضی. جئول 1990 ، 22 ، 239-252. [ Google Scholar ] [ CrossRef ]
- اردوغان، اس. مقایسه روشهای درونیابی برای تولید مدلهای ارتفاعی دیجیتال در مقیاس میدانی. زمین گشت و گذار. روند. Landf. 2009 ، 34 ، 366-376. [ Google Scholar ] [ CrossRef ]
- چنگ، م. وانگ، ی. انگل، بی. ژانگ، دبلیو. پنگ، اچ. چن، ایکس. Xia، H. ارزیابی عملکرد درون یابی فضایی بارش برای شبیه سازی فرآیند هیدرولوژیکی در حوضه سه دره. Water 2017 , 9 , 838. [ Google Scholar ] [ CrossRef ]
- VerH oef, JM; Krivoruchko, K. با استفاده از ArcGIS Geostatistical Analyst ; Esri: Redlands، استرالیا، 2001. [ Google Scholar ]
- Gundogdu، KS; Guney، I. تجزیه و تحلیل فضایی سطوح آب زیرزمینی با استفاده از کریجینگ جهانی. J. Earth Syst. علمی 2007 ، 116 ، 49-55. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Pebesma، EJ زمین آمار چند متغیره در S: بسته gstat. محاسبه کنید. Geosci. 2004 ، 30 ، 683-691. [ Google Scholar ] [ CrossRef ]
- پاتریش، روشهای آماری رزومه کاربردی در اقلیمشناسی. Terra Nostra: Iasi، رومانی، 2009. [ Google Scholar ]
- تزیاکریس، پی. متاکسا، ای. پاپادوپولوس، اف. پاپادوپولو، م. مدل سازی فضایی و ارزیابی پیش بینی آهن خاک با استفاده از درونیابی کریجینگ با pH به عنوان اطلاعات کمکی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 283. [ Google Scholar ] [ CrossRef ]
- اسمیت، ام جی. Goodchild، MF; Longley، PA تجزیه و تحلیل جغرافیایی: راهنمای جامع اصول، تکنیک ها و ابزارهای نرم افزاری . Troubador Publishing LTD: Leicester, UK, 2007. [ Google Scholar ]
- Buhman, MD توابع پایه شعاعی: نظریه و پیاده سازی ; انتشارات دانشگاه کمبریج: کمبریج، انگلستان، 2003. [ Google Scholar ]
- Dumitrescu، A. فضایی سازی پارامترهای هواشناسی و آب و هوایی توسط تکنیک های SIG. Ph.D. پایان نامه، دانشگاه بخارست، بخارست، رومانی، 2012. [ Google Scholar ]
- Childs، C. درونیابی سطوح در تحلیلگر فضایی ArcGIS. ArcUser جولای تا سپتامبر. 2004 ، 3235 ، 569. [ Google Scholar ]
- هاچینسون، MF یک روش جدید برای شبکه بندی داده های ارتفاع و خط جریان با حذف خودکار گودال های جعلی. جی هیدرول. 1989 ، 106 ، 211-232. [ Google Scholar ] [ CrossRef ]
- هاچینسون، MF یک رویکرد تطبیقی محلی برای درونیابی مدلهای ارتفاعی دیجیتال. در مجموعه مقالات سومین کنفرانس بین المللی / کارگاه آموزشی یکپارچه سازی (GIS) و مدل سازی محیطی . مرکز ملی اطلاعات و تحلیل جغرافیایی: سانتا باربارا، کالیفرنیا، ایالات متحده آمریکا، 1996; ص 21-26. [ Google Scholar ]
- هاچینسون، MF بهینه سازی درجه هموارسازی داده ها برای خطوط هموار دو متغیره المان محدود تطبیقی محلی. ANZIAM J. 2000 , 42 , 774. [ Google Scholar ] [ CrossRef ]
- هاچینسون، MF; خو، تی. Stein، JA پیشرفت اخیر در روش شبکه بندی ارتفاعی ANUDEM. ژئومورفومتری 2011 ، 19-22. [ Google Scholar ]
- چن، سی. لی، ی. یان، سی. دای، اچ. لیو، جی. یک الگوریتم قوی از روش چند چهارگانه بر اساس یک تابع تلفات هوبر بهبود یافته برای درونیابی مجموعه داده های ارتفاعی مشتق از سنجش از دور. Remote Sens. 2015 ، 7 ، 3347–3371. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، سی. یانگ، کیو. یوپ، دی. Pang, G. مدلسازی تغییر ساختارهای فضایی توپوگرافی با وضوح DEM با استفاده از تحلیل نیمه واریوگرام و بانک فیلتر. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 107. [ Google Scholar ] [ CrossRef ]
- سالکین، اس. برگس، جی. مورگنروث، جی. میسون، ای. Meason, D. A مطالعه مقایسه ای سه روش غیر زمین آماری برای بهینه سازی درونیابی مدل رقومی ارتفاع. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 300. [ Google Scholar ] [ CrossRef ]
- شیلژگ، ا. لوزیچ، اس. Radoš, D. اثر روش های درونیابی بر کیفیت یک مدل زمین دیجیتال برای تحلیل های ژئومورفومتریک. ته Vjesn. گز. 2015 ، 22 ، 1149-1156. [ Google Scholar ]
- روزو، ا. روزو، بی. کنستانتین، دی. وویکولسکو، ام. ارسنی، م. موراریو، جی. جورجسکو، LP همبستگی بین نقشه های توزیع NO 2 با استفاده از اندازه گیری های GIS و DOAS موبایل در شهر گالاتی. ان دانشگاه Dunarea Jos Galati 2018 ، 41 ، 23–31. [ Google Scholar ]
- محارنا، س. خاتوآ، KK پیش بینی ضریب زبری یک جریان کانال باز پرپیچ و خم با استفاده از سیستم استنتاج عصبی فازی. اندازه گیری 2014 ، 51 ، 112-123. [ Google Scholar ] [ CrossRef ]
- خو، ی. ژانگ، جی. لانگ، ز. تانگ، اچ. ژانگ، X. پیشبینی تقاضای آب شهری ساعتی با استفاده از شبکه دولتی پژواک باور عمیق. Water 2019 , 11 , 351. [ Google Scholar ] [ CrossRef ]
- کوربال، آی. افه، ر. اوزدمیر، اچ. سویکان، ع. Sönmez، S. رویکرد مبتنی بر GIS برای تجزیه و تحلیل سیل: مطالعه موردی رویداد سیل ناگهانی Keçidere (ترکیه). Geocarto Int. 2016 ، 31 ، 355-366. [ Google Scholar ] [ CrossRef ]
- الشاذلی، ع. Hoermann, G. توسعه ظرفیت ذخیره سازی و مورفولوژی مخزن سد بلند اسوان. هیدرول. علمی J. 2016 , 61 , 2639–2648. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گاف، ج.ا. Nordfjord، S. درونیابی مورفولوژی رودخانه با استفاده از تبدیل مختصات کانال گرا: مطالعه موردی از قفسه نیوجرسی. ریاضی. جئول 2004 ، 36 ، 643-658. [ Google Scholar ] [ CrossRef ]
- زیمرمن، دی. پاولیک، سی. راگلز، ا. آرمسترانگ، MP مقایسه تجربی کریجینگ معمولی و جهانی و وزن دهی فاصله معکوس. ریاضی. جئول 1999 ، 31 ، 375-390. [ Google Scholar ] [ CrossRef ]
- Podsadneaea، EA؛ Pavliuc, B. روشهای درونیابی برای داده های ارتفاع. شهر مدیریت. عمل تئوری. 2017 ، 3 ، 52-60. [ Google Scholar ]
- Pankalakr، SS; Jarag، AP ارزیابی تکنیک های درونیابی فضایی برای تولید عمق سنجی رودخانه حوضه رودخانه پانچگانگا با استفاده از تکنیک های ژئوانفورماتیک. آسیایی J. Geoinform. 2016 ، 15 ، 9-15. [ Google Scholar ]



بدون دیدگاه