

خلاصه
کلید واژه ها:
حساسیت زمین لغزش ; وزن شواهد شبکه تابع پایه شعاعی ; بیز ساده لوح ; SysFor
1. معرفی
2. تنظیمات زمین شناسی و ژئومورفولوژیکی
3. مواد و روشها
3.1. روش شناسی
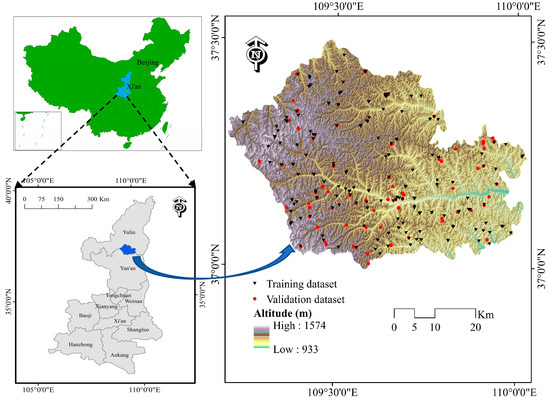
3.2. تهیه مجموعه داده های آموزشی و اعتبار سنجی
3.3. عوامل موثر بر زمین لغزش
شاخص توان جریان (SPI) به فرسایش آب جاری، ضخامت لایه خاک و محتوای ماسه و سیلت اشاره دارد. SPI به طور گسترده در مطالعه حساسیت زمین لغزش استفاده شده است [ 52 ]. این عوامل بر وقوع حوادث آسیب شیب تأثیر خواهند گذاشت [ 53 ]. SPI دارای فرمول زیر است:
که در آن As یک حوضه خاص و B نشان دهنده یک شیب محلی است [ 53 ]. با توجه به مقدار محاسبه شده، SPI به پنج دسته گروه بندی می شود: (1) < 10; (2) 10-20; (3) 20-30; (4) 30-40; (5) > 40.
شاخص رطوبت توپوگرافی (TWI) می تواند میزان رطوبت موجود در خاک را منعکس کند. TWI را می توان با فرمول [ 54 ] بیان کرد
که در آن ∂ یک منطقه مشارکت محلی سربالایی است که نشان دهنده مقدار آب جاری به یک مکان خاص است و tan B یک شیب محلی است. نقشه TWI منطقه مورد مطالعه شامل شش دسته زیر بود: (1) 1.11-2. (2) 2-3; (3) 3-4; (4) 4-5; (5) > 5.
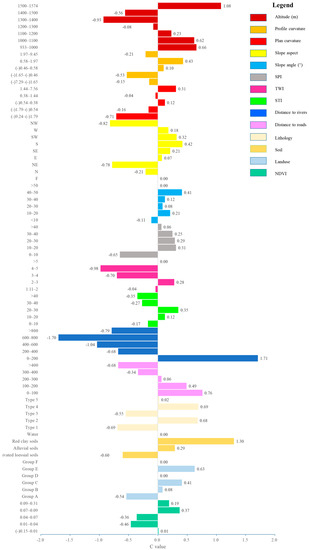
3.4. اوزان شواهد
مدل وزن شواهد از شکل لگاریتمی قانون بیز ساخته شده است. مقادیر وزنی برای طبقات عوامل متاثر از زمین لغزش را می توان در معادلات (3) و (4) نوشت [ 60 ]:
که در آن P1 و P2، به ترتیب، تعداد پیکسل هایی را نشان می دهند که در یک دسته عامل مشخص ظاهر می شوند و ظاهر نمی شوند. P3 تعداد پیکسل هایی را نشان می دهد که هیچ لغزشی در یک دسته عامل خاص ندارند. هنگامی که نه لغزش و نه یک پیکسل زمین لغزش در یک دسته عامل خاص وجود دارد، P4 استفاده می شود [ 61 ].
وزن مثبت (W+) نه تنها نشان دهنده وجود عوامل موثر بر زمین لغزش است، بلکه نشان دهنده همبستگی مثبت بین عوامل و زمین لغزش است. وزن منفی (W-) میزان همبستگی منفی بین آنها را نشان می دهد [ 60 ]. تفاوت بین دو وزن را می توان به صورت معادله (5) بیان کرد:
که در آن C کنتراست وزن است. با توجه به مقدار C، رابطه بین متغیرهای پیش بینی کننده و زمین لغزش ها می تواند به طور جامع تری منعکس شود.
3.5. بیز ساده لوح
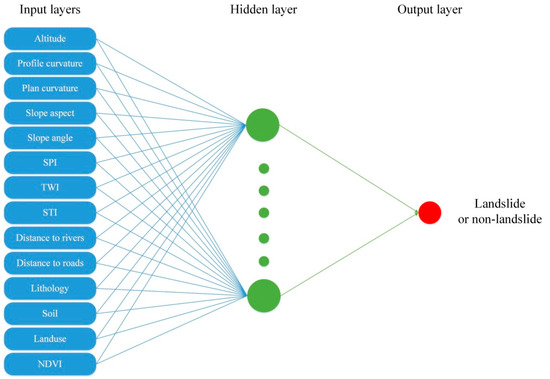
3.6. شبکه تابع پایه شعاعی
برای تمام گزینه های ممکن برای f ، تابع گاوسی را می توان به صورت زیر نوشت:
که در آن C i ∈ Rn مرکز تابع پایه را نشان می دهد. n گره لایه پنهان وجود دارد. فرض کنید f i d i ∈ R شعاع اولین گره لایه پنهان باشد. از طریق ماتریس وزن (W ∈ Rn i × n) برای اتصال گره های لایه پنهان و خروجی شبکه، f p بردار گره پنهان است.
3.7. SysFor
3.8. ماشین بردار پشتیبانی
کیفیت مدل انتخابی و داده های ورودی بر کیفیت ارزیابی حساسیت زمین لغزش تأثیر می گذارد [ 73 ]. استفاده از این روش برای آزمایش عامل تأثیرگذار را می توان به صورت (معادله (8)) بیان کرد:
که در آن w T یک ماتریس معکوس را نشان می دهد، ماتریس وزن هر عامل تأثیرگذار زمین لغزش در این مطالعه، a = (a1, a2, …, a14) بردار ورودی (14 عامل مؤثر بر زمین لغزش) و b جبران از مبدا است. از ابر هواپیما هر چه وزن w i به صفر نزدیکتر باشد، عوامل مؤثر بر زمین لغزش برای پیش بینی زمین لغزش اهمیت کمتری دارند [ 74 ].
4. نتایج و تجزیه و تحلیل
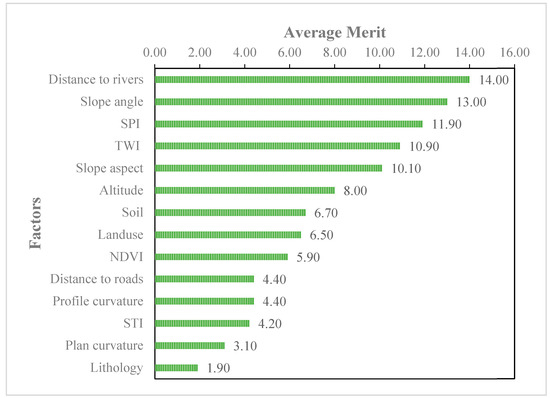
4.1. تحلیل همبستگی عوامل مؤثر
4.2. انتخاب عوامل موثر بر زمین لغزش
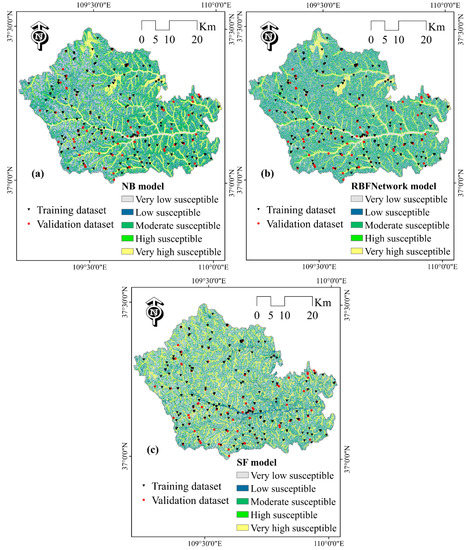
4.3. ساخت نقشه های حساسیت به زمین لغزش
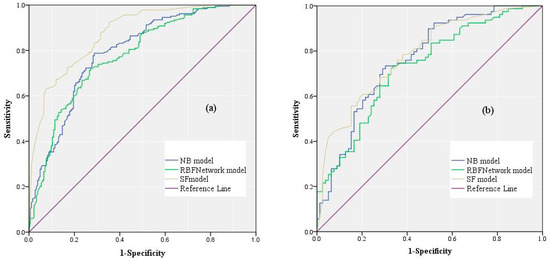
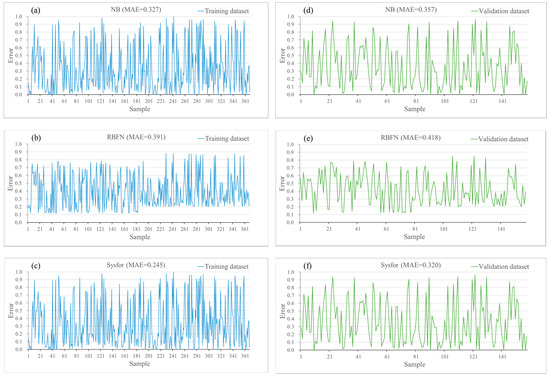
4.4. اعتبارسنجی و مقایسه مدل ها
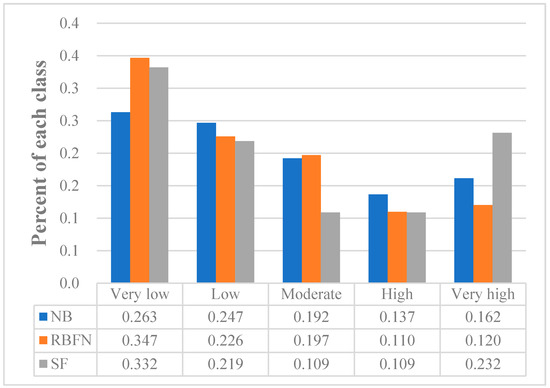
4.5. مقایسه نقشه های حساسیت به زمین لغزش
5. بحث
6. نتیجه گیری
منابع
- تین بوی، دی. Tuan، TA; کلمپه، اچ. پرادان، بی. Revhaug، I. مدل های پیش بینی فضایی برای خطرات زمین لغزش کم عمق: ارزیابی مقایسه ای از کارایی ماشین های بردار پشتیبان، شبکه های عصبی مصنوعی، رگرسیون لجستیک هسته، و درخت مدل لجستیک. زمین لغزش 2016 ، 13 ، 361-378. [ Google Scholar ] [ CrossRef ]
- ون وستن، سی. Van Asch، TW; Soeters، R. خطر زمین لغزش و پهنه بندی خطر – چرا هنوز اینقدر دشوار است؟ گاو نر مهندس جئول محیط زیست 2006 ، 65 ، 167-184. [ Google Scholar ] [ CrossRef ]
- پرادان، ب. نقشهبرداری حساسیت زمین لغزش یک حوضه با استفاده از نسبت فرکانس، منطق فازی و رویکردهای رگرسیون لجستیک چند متغیره. J. شرکت هندی Remote Sens. 2010 , 38 , 301–320. [ Google Scholar ] [ CrossRef ]
- وانگ، جی. لی، ایکس. چن، دبلیو. شهابی، ح. شیرزادی، ع. روشهای هوش محاسباتی ترکیبی برای نقشهبرداری حساسیت زمین لغزش. Symmetry 2020 , 12 , 325. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Wan, S. یک سیستم پشتیبانی تصمیم فضایی برای استخراج عوامل اصلی و آستانه برای نقشه حساسیت زمین لغزش. مهندس جئول 2009 ، 108 ، 237-251. [ Google Scholar ] [ CrossRef ]
- آکگون، ا. Bulut، F. حساسیت زمین لغزش مبتنی بر GIS برای منطقه Arsin-Yomra (ترابزون، شمال ترکیه). محیط زیست جئول 2007 ، 51 ، 1377-1387. [ Google Scholar ] [ CrossRef ]
- لی، اس. ریو، J.-H. کیم، آی.-اس. تحلیل حساسیت زمین لغزش و تأیید آن با استفاده از نسبت احتمال، رگرسیون لجستیک و مدلهای شبکه عصبی مصنوعی: مطالعه موردی یانگین، کره. زمین لغزش 2007 ، 4 ، 327-338. [ Google Scholar ] [ CrossRef ]
- آکگون، A. مقایسه نقشه های حساسیت زمین لغزش تولید شده با روش های رگرسیون لجستیک، تصمیم گیری چند معیاره و نسبت احتمال: مطالعه موردی در زمیر، ترکیه. زمین لغزش 2012 ، 9 ، 93-106. [ Google Scholar ] [ CrossRef ]
- Nefeslioglu، HA; گوکچ اوغلو، سی. Sonmez, H. ارزیابی استفاده از رگرسیون لجستیک و شبکههای عصبی مصنوعی با استراتژیهای نمونهگیری مختلف برای تهیه نقشههای حساسیت زمین لغزش. مهندس جئول 2008 ، 97 ، 171-191. [ Google Scholar ] [ CrossRef ]
- ژائو، ایکس. Chen, W. بهینه سازی مدل های هوش محاسباتی برای ارزیابی حساسیت زمین لغزش. Remote Sens. 2020 , 12 , 2180. [ Google Scholar ] [ CrossRef ]
- کلوز، ام. گروبر، دی. دام، بی. Gerold، G. پایگاه های اطلاعاتی فضایی و GIS به عنوان ابزاری برای مدل سازی حساسیت زمین لغزش منطقه ای. ز. ژئومورفول. 2014 ، 58 ، 1-36. [ Google Scholar ] [ CrossRef ]
- تین بوی، دی. پرادان، بی. لوفمن، او. Revhaug، I. ارزیابی حساسیت زمین لغزش در ویتنام با استفاده از ماشینهای بردار پشتیبان، درخت تصمیم، و مدلهای ساده بیز. ریاضی. مشکل مهندس 2012 , 2012 . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پرادان، بی. لی، اس. ارزیابی حساسیت زمین لغزش و تحلیل اثر عاملی: شبکههای عصبی مصنوعی پس انتشار و مقایسه آنها با نسبت فرکانس و مدلسازی رگرسیون لجستیک دو متغیره. محیط زیست مدل. نرم افزار 2010 ، 25 ، 747-759. [ Google Scholar ] [ CrossRef ]
- ژائو، ایکس. Chen, W. ارزیابی مبتنی بر GIS مدلهای حساسیت زمین لغزش با استفاده از عوامل قطعی و تکنیکهای مجموعه مبتنی بر درختان عملکردی. Appl. علمی 2020 ، 10 ، 16. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وانگ، جی. چن، ایکس. Chen, W. پیش بینی فضایی حساسیت زمین لغزش بر اساس GIS و توابع متمایز. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 144. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Nsengiyumva، JB; لو، جی. آمانامبو، AC؛ Mind’je، R. Habiyaremye، G. کاراماژ، اف. Ochege، FU؛ Mupenzi، C. مقایسه روش های احتمالی و آماری در مدل سازی حساسیت زمین لغزش در رواندا / مرکز شرق آفریقا. علمی کل محیط. 2019 ، 659 ، 1457–1472. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- موندال، اس. ماندال، S. مدل تابع اعتقاد شواهد مبتنی بر داده (EBF) در کاوش مناطق حساس به لغزش برای دارجلینگ هیمالیا، هند. Geocarto Int. 2020 ، 35 ، 818-856. [ Google Scholar ] [ CrossRef ]
- Althuwaynee، OF; پرادان، بی. لی، اس. کاربرد مدل تابع باور شواهدی در نگاشت حساسیت زمین لغزش. محاسبه کنید. Geosci. 2012 ، 44 ، 120-135. [ Google Scholar ] [ CrossRef ]
- ژانگ، ز. یانگ، اف. چن، اچ. وو، ی. لی، تی. لی، دبلیو. وانگ، کیو. تجزیه و تحلیل حساسیت زمین لغزش مبتنی بر GIS با استفاده از نسبت فرکانس و مدلهای تابع باور شواهدی لیو، پی. محیط زیست علوم زمین 2016 ، 75 ، 948. [ Google Scholar ] [ CrossRef ]
- رامش، وی. انبازهاگان، S. نقشهبرداری حساسیت زمین لغزش در امتداد بخش جاده گات تپههای کولی (هند) با استفاده از مدلهای نسبت فرکانس، اثر نسبی و منطق فازی. محیط زیست علوم زمین 2015 ، 73 ، 8009-8021. [ Google Scholar ] [ CrossRef ]
- راسید، ع. باندری، NP; یاتابه، آر. عملکرد نسبت فرکانس و مدل رگرسیون لجستیک در ایجاد نقشه حساسیت زمین لغزش مبتنی بر GIS در کوه لومپوباتانگ، اندونزی. Geoenviron. Disasters 2016 ، 3 ، 19. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- هونگ، اچ. لیو، جی. Bui، DT; پرادان، بی. آچاریا، تی دی. فام، بی تی؛ زو، ا. چن، دبلیو. احمد، BB نقشهبرداری حساسیت زمین لغزش با استفاده از درخت تصمیم J48 با مجموعههای AdaBoost، Bagging و Rotation Forest در منطقه Guangchang (چین). Catena 2018 ، 163 ، 399-413. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. Li، Y. ارزیابی مبتنی بر GIS حساسیت زمین لغزش با استفاده از مدلهای هوش محاسباتی ترکیبی. CATENA 2020 , 195 , 104777. [ Google Scholar ] [ CrossRef ]
- فام، بی تی؛ Bui، DT; پراکاش، آی. Dholakia، M. ادغام ترکیبی شبکه های عصبی پرسپترون چند لایه و مجموعه های یادگیری ماشین برای ارزیابی حساسیت زمین لغزش در منطقه هیمالیا (هند) با استفاده از GIS. Catena 2017 ، 149 ، 52-63. [ Google Scholar ] [ CrossRef ]
- فام، بی تی؛ جعفری، ع. پراکاش، آی. Bui, DT یک مدل جدید ترکیبی هوشمند از ماشینهای بردار پشتیبان و مجموعه MultiBoost برای مدلسازی حساسیت زمین لغزش. گاو نر مهندس جئول محیط زیست 2019 ، 78 ، 2865–2886. [ Google Scholar ] [ CrossRef ]
- آدا، م. San، BT مقایسه تکنیکهای یادگیری ماشینی برای نقشهبرداری حساسیت زمین لغزش با استفاده از نمونهگیری تصادفی دو سطحی (2LRS) در حوضه آبریز آلاکیر، آنتالیا، ترکیه. نات. خطرات 2018 ، 90 ، 237-263. [ Google Scholar ] [ CrossRef ]
- شیرزادی، ع. سلیمانی، ک. حبیب نژاد، م. کاویان، ع. چاپی، ک. شهابی، ح. چن، دبلیو. خسروی، ک. تای فام، بی. پرادان، بی. الگوریتم های جدید یادگیری ماشین مبتنی بر GIS برای نگاشت حساسیت زمین لغزش کم عمق. Sensors 2018 , 18 , 3777. [ Google Scholar ] [ CrossRef ]
- او، س. شهابی، ح. شیرزادی، ع. لی، اس. چن، دبلیو. وانگ، ن. چای، اچ. بیان، اچ. ما، جی. چن، ی. و همکاران مدلسازی فضایی لغزش با استفاده از الگوریتمهای یادگیری ماشینی مبتنی بر آماری دو متغیره جدید، طبقهبندیکننده rbf و الگوریتمهای یادگیری ماشین شبکه rbf. علمی کل محیط. 2019 ، 663 ، 1-15. [ Google Scholar ] [ CrossRef ]
- کیم، جی. لی، اس. یونگ، اچ. لی، اس. نقشهبرداری حساسیت زمین لغزش با استفاده از مدلهای جنگل تصادفی و درخت تقویتشده در پیونگ چانگ، کره. Geocarto Int. 2018 ، 33 ، 1000-1015. [ Google Scholar ] [ CrossRef ]
- پائودل، یو. اوگوچی، تی. Hayakawa، YS تجزیه و تحلیل حساسیت زمین لغزش با وضوح چندگانه با استفاده از DEM و جنگل تصادفی. بین المللی جی. ژئوشی. 2016 ، 07 ، 726–743. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هونگ، اچ. میائو، ی. لیو، جی. Zhu، A. بررسی اثرات طراحی و کمیت دادههای غیبت بر عملکرد نقشهبرداری تصادفی حساسیت زمین لغزش مبتنی بر جنگل. Catena 2019 ، 176 ، 45–64. [ Google Scholar ] [ CrossRef ]
- فام، بی تی؛ پرادان، بی. Bui، DT; پراکاش، آی. Dholakia، MB مطالعه مقایسه ای روش های مختلف یادگیری ماشین برای ارزیابی حساسیت زمین لغزش. محیط زیست مدل. نرم افزار 2016 ، 84 ، 240-250. [ Google Scholar ] [ CrossRef ]
- فیضی زاده، ب. رودپشتی، ام اس; بلاشکه، تی. Aryal, J. مقایسه عملکردهای هسته ماشین بردار پشتیبان مبتنی بر GIS برای نگاشت حساسیت زمین لغزش. عرب جی. ژئوشی. 2017 ، 10 ، 122. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. شهابی، ح. شیرزادی، ع. لی، تی. گوا، سی. هونگ، اچ. لی، دبلیو. پان، دی. هوی، جی. Ma، M. یک رویکرد جدید مجموعه ای از طبقه بندی درخت مدل لجستیک مبتنی بر آماری دو متغیره برای ارزیابی حساسیت زمین لغزش. Geocarto Int. 2018 ، 33 ، 1398–1420. [ Google Scholar ] [ CrossRef ]
- Truong، XL; میتامورا، م. کونو، ی. رغوان، وی. یونزاوا، جی. Truong، XQ; انجام دهید، TH; تین بوی، دی. لی، اس. بهبود عملکرد پیشبینی مدل حساسیت زمین لغزش با استفاده از رویکرد یادگیری ماشین ترکیبی مجموعه کیسهای و درخت مدل لجستیک. Appl. علمی 2018 ، 8 ، 1046. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لومباردو، ال. کاما، م. کونوسنتی، سی. Mrker، M. Rotigliano، E. رگرسیون لجستیک باینری در مقابل درختان تصمیم افزایش یافته گرادیان تصادفی در ارزیابی حساسیت زمین لغزش برای رویدادهای زمین لغزش چندگانه: کاربرد برای رویداد طوفان 2009 در مسینا (سیسیل، جنوب ایتالیا). نات. خطرات 2015 ، 79 ، 1621-1648. [ Google Scholar ] [ CrossRef ]
- آهنگ، ی. نیو، ر. خو، اس. بله، آر. پنگ، ال. گوا، تی. لی، اس. چن، تی. نقشهبرداری حساسیت زمین لغزش بر اساس درخت تصمیمگیری افزایش گرادیان وزنی در بخش وانژو از منطقه مخزن سه دره (چین). ISPRS Int. J. Geo-Inf. 2018 ، 8 ، 4. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چن، دبلیو. شهابی، ح. ژانگ، اس. خسروی، ک. شیرزادی، ع. چاپی، ک. فام، بی تی؛ ژانگ، تی. ژانگ، ال. چای، اچ. و همکاران مدلسازی حساسیت زمین لغزش بر اساس GIS و رگرسیون لجستیک هسته مبتنی بر کیسههای جدید. Appl. علمی 2018 ، 8 ، 2540. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لی، ی. Chen, W. ارزیابی حساسیت زمین لغزش با استفاده از ادغام ترکیبی تابع اعتقاد شواهد و تکنیکهای یادگیری ماشین. Water 2019 ، 12 ، 113. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پورقاسمی، HR; Rossi، M. مدلسازی حساسیت زمین لغزش در یک منطقه مستعد زمین لغزش در استان مازندران، شمال ایران: مقایسه بین روشهای GLM، GAM، MARS و M-AHP. نظریه. Appl. کلیماتول. 2017 ، 130 ، 609-633. [ Google Scholar ] [ CrossRef ]
- بورلی، ال. سیورلئو، ام. Gullà، G. ارزیابی حساسیت زمین لغزش کم عمق در سنگ های گرانیتی با استفاده از روش های آماری مبتنی بر GIS: سهم نقشه درجه هوازدگی. زمین لغزش 2018 ، 15 ، 1127–1142. [ Google Scholar ] [ CrossRef ]
- هونگ، اچ. پورقاسمی، HR; پورتقی، ZS ارزیابی حساسیت زمین لغزش در شهرستان لیانهوا (چین): مقایسه بین تکنیک داده کاوی تصادفی جنگل و مدلهای آماری دو متغیره و چند متغیره. ژئومورفولوژی 2016 ، 259 ، 105-118. [ Google Scholar ] [ CrossRef ]
- مزال، MR; پرادان، بی. الگوریتم بهبود یافته برای شناسایی زمین لغزش های کم عمق و عمیق در جنگل های انبوه استوایی از داده های اسکن لیزری هوابرد. Catena 2018 ، 167 ، 147–159. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. پورقاسمی، HR; نقیبی، SA اولویتبندی عوامل شرطیسازی زمین لغزش و مدلسازی فضایی آن در شهرستان شانگنان، چین با استفاده از الگوریتمهای داده کاوی مبتنی بر GIS. گاو نر مهندس جئول محیط زیست 2018 ، 77 ، 611-629. [ Google Scholar ] [ CrossRef ]
- کاوزوغلو، تی. شاهین، EK; Colkesen, I. انتخاب عوامل شرطی سازی بهینه در نگاشت حساسیت زمین لغزش انتقالی کم عمق با استفاده از الگوریتم ژنتیک. مهندس جئول 2015 ، 192 ، 101-112. [ Google Scholar ] [ CrossRef ]
- محلینگم، ر. اولسن، ام جی; O’Banion، MS ارزیابی تکنیک های نقشه برداری حساسیت زمین لغزش با استفاده از عوامل شرطی سازی مشتق از لیدار (مطالعه موردی اورگان). Geomat. نات. خطر خطرات 2016 ، 7 ، 1884-1907. [ Google Scholar ] [ CrossRef ]
- سیویک، ای. Topal، T. نقشهبرداری حساسیت زمین لغزش مبتنی بر GIS برای بخش مشکلساز خط لوله گاز طبیعی، هندک (ترکیه). محیط زیست جئول 2003 ، 44 ، 949-962. [ Google Scholar ] [ CrossRef ]
- یالچین، ا. Bulut، F. نقشهبرداری حساسیت زمین لغزش با استفاده از GIS و تکنیکهای فتوگرامتری دیجیتال: مطالعه موردی از Ardesen (NE-Turkey). نات. خطرات 2007 ، 41 ، 201-226. [ Google Scholar ] [ CrossRef ]
- لی، اس. کاربرد مدل رگرسیون لجستیک و اعتبار سنجی آن برای نگاشت حساسیت زمین لغزش با استفاده از GIS و داده های سنجش از دور. بین المللی J. Remote Sens. 2005 ، 26 ، 1477-1491. [ Google Scholar ] [ CrossRef ]
- گالی، م. آردیزون، اف. کاردینالی، م. گوزتی، اف. Reichenbach, P. مقایسه نقشههای فهرست زمین لغزش. ژئومورفولوژی 2008 ، 94 ، 268-289. [ Google Scholar ] [ CrossRef ]
- Yalcin، A. نقشهبرداری حساسیت زمین لغزش مبتنی بر GIS با استفاده از فرآیند تحلیل سلسله مراتبی و آمار دو متغیره در Ardesen (ترکیه): مقایسه نتایج و تأییدها. Catena 2008 ، 72 ، 1-12. [ Google Scholar ] [ CrossRef ]
- کوستانزو، دی. روتیگلیانو، ای. ایریگارای، سی. Jiménez-Perálvarez, J. Chacón, J. رویههای انتخاب فاکتور در مدل حساسیت زمین لغزش با کمک Google Earth TM: کاربرد در حوضه رودخانه بیرو (اسپانیا). در علم و عمل زمین لغزش ; Springer: برلین/هایدلبرگ، آلمان، 2013; صص 541-550. [ Google Scholar ]
- مور، شناسه; گریسون، آر. Ladson، A. مدلسازی دیجیتال زمین: مروری بر کاربردهای هیدرولوژیکی، ژئومورفولوژیکی و بیولوژیکی. هیدرول. روند. 1991 ، 5 ، 3-30. [ Google Scholar ] [ CrossRef ]
- بون، ک. کرکبی، ام. شوفیلد، ن. Tagg, A. آزمایش یک مدل پیشبینی سیل مبتنی بر فیزیکی (TOPMODEL) برای سه حوضه آبریز بریتانیا. جی هیدرول. 1984 ، 69 ، 119-143. [ Google Scholar ] [ CrossRef ]
- Devkota، KC؛ رژمی، م. پورقاسمی، HR; یوشیدا، ک. پرادان، بی. ریو، آی سی; Dhital، MR; Althuwaynee، نقشهبرداری حساسیت زمین لغزش با استفاده از ضریب اطمینان، شاخص آنتروپی و مدلهای رگرسیون لجستیک در GIS و مقایسه آنها در بخش جاده موگلینگ – نارایانگات در نپال هیمالیا. نات. خطرات 2013 ، 65 ، 135-165. [ Google Scholar ] [ CrossRef ]
- پورقاسمی، ح. مرادی، ح. عقدا، نقشهبرداری حساسیت زمین لغزش SF با رگرسیون لجستیک باینری، فرآیند تحلیل سلسله مراتبی و مدلهای شاخص آماری و ارزیابی عملکرد آنها. نات. خطرات 2013 ، 69 ، 749-779. [ Google Scholar ] [ CrossRef ]
- لیو، جی. میسون، پی. کلریسی، ن. چن، اس. دیویس، ا. میائو، اف. دنگ، اچ. لیانگ، L. ارزیابی خطر زمین لغزش در منطقه سه دره رودخانه یانگ تسه با استفاده از تصاویر ASTER: Zigui-Badong. ژئومورفولوژی 2004 ، 61 ، 171-187. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. هونگ، اچ. پناهی، م. شهابی، ح. وانگ، ی. شیرزادی، ع. پیراسته، س. آلشیخ، ع.ا. خسروی، ک. پناهی، س. پیش بینی فضایی حساسیت زمین لغزش با استفاده از تکنیک های داده کاوی مبتنی بر gis از anfis با الگوریتم بهینه سازی نهنگ (woa) و بهینه ساز گرگ خاکستری (gwo). Appl. علمی 2019 ، 9 ، 3755. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چن، دبلیو. ژائو، ایکس. شهابی، ح. شیرزادی، ع. خسروی، ک. چای، اچ. ژانگ، اس. ژانگ، ال. ما، جی. چن، ی. پیشبینی فضایی حساسیت زمین لغزش با ترکیب تابع اعتقاد شواهد، رگرسیون لجستیک و درخت مدل لجستیک. Geocarto Int. 2019 ، 34 ، 1177-1201. [ Google Scholar ] [ CrossRef ]
- رگمی، NR; جیاردینو، جی آر. Vitek، JD مدلسازی حساسیت به زمین لغزش با استفاده از رویکرد وزن شواهد: کلرادو غربی، ایالات متحده. ژئومورفولوژی 2010 ، 115 ، 172-187. [ Google Scholar ] [ CrossRef ]
- اوزدمیر، ا. Altural، T. مطالعه مقایسه ای نسبت فراوانی، وزن شواهد و روش های رگرسیون لجستیک برای نقشه برداری حساسیت زمین لغزش: کوه های سلطان، جنوب غربی ترکیه. J. آسیایی زمین علوم. 2013 ، 64 ، 180-197. [ Google Scholar ] [ CrossRef ]
- بهرگوی، پ. Jyothi, S. استفاده از روش داده کاوی ساده بیز برای طبقه بندی خاک های زمین کشاورزی. بین المللی جی. کامپیوتر. علمی شبکه امن 2009 ، 9 ، 117-122. [ Google Scholar ]
- وو، ایکس. کومار، وی. کوینلان، جی آر. گوش، ج. یانگ، کیو. موتودا، اچ. مک لاکلان، جی. نگ، ا. لیو، بی. فیلیپ، SY 10 الگوریتم برتر در داده کاوی. دانستن Inf. سیستم 2008 ، 14 ، 1-37. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فام، بی تی؛ خسروی، ک. پراکاش، I. کاربرد و مقایسه روشهای یادگیری ماشینی مبتنی بر درخت تصمیم در ارزیابی حساسیت زمین در منطقه پاوری گرهوال، اوتاراکند، هند. محیط زیست روند. 2017 ، 4 ، 711-730. [ Google Scholar ] [ CrossRef ]
- پاول، MJ نظریه تقریب تابع مبنای شعاعی در سال 1990. Adv. عدد. مقعدی 1992 ، 105-210. [ Google Scholar ]
- Broomhead، DS; Lowe، D. توابع پایه شعاعی، درون یابی تابعی چند متغیره و شبکه های تطبیقی . سیگنالهای سلطنتی و تأسیسات رادار مالورن (بریتانیا): مالورن، بریتانیا، 1988. [ Google Scholar ]
- مک کوئین، جی. برخی روشها برای طبقهبندی و تحلیل مشاهدات چند متغیره. در مجموعه مقالات پنجمین سمپوزیوم برکلی در مورد آمار و احتمالات ریاضی، اوکلند، کالیفرنیا، ایالات متحده آمریکا، 21 ژوئن تا 18 ژوئیه 1965; ص 281-297. [ Google Scholar ]
- راملهارت، دی. یادگیری بازنمایی های داخلی با انتشار خطا. توزیع موازی روند. 1986 ، 1 ، 318-362. [ Google Scholar ]
- هایکین، اس. شبکه های عصبی: یک بنیاد جامع . Prentice Hall PTR: Upper Saddle River، نیوجرسی، ایالات متحده آمریکا، 1994. [ Google Scholar ]
- اسلام، ز. گیگینز، اچ. کشف دانش از طریق SysFor: یک جنگل توسعه یافته سیستماتیک از درختان تصمیم گیری چندگانه. در مجموعه مقالات نهمین کنفرانس داده کاوی استرالیا – جلد 121، بالارات، استرالیا، 1-2 دسامبر 2011. صص 195-204. [ Google Scholar ]
- السقف، ی. اسلام، MZ داده کاوی و حریم خصوصی کاربران سایت های شبکه های اجتماعی: پیامدهای مشکل داده کاوی. علمی مهندس اخلاق 2015 ، 21 ، 941-966. [ Google Scholar ] [ CrossRef ]
- السقف، ی. نیلسن، اس. خود افشاگری در فیس بوک در میان کاربران زن و رابطه آن با احساس تنهایی. محاسبه کنید. هوم رفتار 2014 ، 36 ، 460-468. [ Google Scholar ] [ CrossRef ]
- پرادان، ب. مطالعه تطبیقی بر روی توانایی پیشبینی درخت تصمیم، ماشین بردار پشتیبان و مدلهای عصبی فازی در نقشهبرداری حساسیت زمین لغزش با استفاده از GIS. محاسبه کنید. Geosci. 2013 ، 51 ، 350-365. [ Google Scholar ] [ CrossRef ]
- ملادنیچ، دی. برانک، جی. گروبلنیک، ام. Milic-Frayling، N. انتخاب ویژگی با استفاده از وزن طبقهبندی خطی: تعامل با مدلهای طبقهبندی. در مجموعه مقالات بیست و هفتمین کنفرانس بین المللی سالانه ACM SIGIR در مورد تحقیق و توسعه در بازیابی اطلاعات، شفیلد، انگلستان، 25-29 ژوئیه 2004. صص 234-241. [ Google Scholar ]
- گروبر، اس. Haeberli، W. Permafrost در شیبهای سنگ بستر و بیثباتی مربوط به دمای آن به دنبال تغییرات آب و هوایی. جی. ژئوفیس. Res. زمین گشت و گذار. 2007 112 . _ [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اقدم، IN; ورزنده، MHM; پرادان، ب. نقشهبرداری حساسیت زمین لغزش با استفاده از شاخص آماری مجموعی (Wi) و مدل سیستم استنتاج عصبی فازی تطبیقی (ANFIS) در کوههای البرز (ایران). محیط زیست علوم زمین 2016 ، 75 ، 1-20. [ Google Scholar ] [ CrossRef ]
- چاوهان، اس. شارما، م. Arora، MK پهنهبندی حساسیت به زمین لغزش منطقه Chamoli، گرهوال هیمالیا، با استفاده از مدل رگرسیون لجستیک. زمین لغزش 2010 ، 7 ، 411-423. [ Google Scholar ] [ CrossRef ]
- پراندینی، ال. گویدینی، جی. بوتورا، ج. پان آنو، دبلیو. سانتوس، الف. رفتار پوشش گیاهی در پایداری شیب: بررسی انتقادی. گاو نر بین المللی دانشیار مهندس Geol.-Bull. l’Assoc. بین المللی 1977 ، 16 ، 51-55. [ Google Scholar ] [ CrossRef ]
- Chung, C.-JF; Fabbri، AG اعتبار سنجی مدل های پیش بینی فضایی برای نقشه برداری خطر زمین لغزش. نات. خطرات 2003 ، 30 ، 451-472. [ Google Scholar ] [ CrossRef ]
- حسینعلی زاده، م. کریمی نژاد، ن. چن، دبلیو. پورقاسمی، HR; علی نژاد، م. محمدیان بهبهانی، ع. مدلسازی حساسیت تیفنباخر، JP Gully با استفاده از درختهای عملکردی، درخت بیز ساده و مدلهای جنگل تصادفی. Geoderma 2019 ، 342 ، 1-11. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. ژائو، ایکس. سانگاراتوس، پ. شهابی، ح. ایلیا، آی. شو، دبلیو. وانگ، ایکس. احمد، BB ارزیابی استفاده از روشهای مجموعهای مبتنی بر درخت در نقشهبرداری پتانسیل چشمههای آب زیرزمینی. جی هیدرول. 2020 , 583 , 124602. [ Google Scholar ] [ CrossRef ]
- شیائو، تی. سگونی، س. چن، ال. یین، ک. Casagli، N. مرحله ای فراتر از نقشه های حساسیت زمین لغزش: یک روش ساده برای بررسی و توضیح نتایج مختلف به دست آمده توسط رویکردهای مختلف. رانش زمین 2019 ، 1-14. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوا، سی. Qin، Y. ما، دی. شیا، ی. چن، ی. سی، س. ترکیب یونی، امضای زمین شناسی و اثرات زیست محیطی متان بستر زغال سنگ آب تولید شده در چین. منابع انرژی بخش A ابزار بازیابی. محیط زیست اف. 2019 ، 1-15. [ Google Scholar ] [ CrossRef ]
- عابدینی، م. ارزیابی مدل های LNRF، FR و AHP در شاخص نگاشت حساسیت زمین لغزش: مطالعه تطبیقی حوزه آبخیز نوژیان در استان لرستان، ایران. محیط زیست علوم زمین 2018 ، 77 ، 405. [ Google Scholar ] [ CrossRef ]
- نقشه کشی حساسیت زمین لغزش با استفاده از تجزیه و تحلیل آماری در منطقه گسل آناتولی شمالی (NAFZ) در بخش شمالی شهر سوشهری، ترکیه. نات. خطرات 2018 ، 92 ، 133-154. [ Google Scholar ] [ CrossRef ]
- لین، W.-T. لین، سی.-ای. چو، دبلیو.-سی. ارزیابی بازیابی پوشش گیاهی و فرسایش خاک در زمین لغزش های ناشی از یک زلزله فاجعه بار: مطالعه موردی در مرکز تایوان. Ecol. مهندس 2006 ، 28 ، 79-89. [ Google Scholar ] [ CrossRef ]
- گونزالس-اولائوری، آ. Mickovski، SB اثر هیدرولوژیکی پوشش گیاهی در برابر زمین لغزش های ناشی از بارندگی. جی هیدرول. 2017 ، 549 ، 374-387. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هادموکو، دی اس؛ لوین، اف. Samodra, G. کاربرد یک مدل آماری نیمه کمی و مبتنی بر GIS برای پهنه بندی حساسیت زمین لغزش در حوضه آبریز Kayangan، جاوه، اندونزی. نات. خطرات 2017 ، 87 ، 437-468. [ Google Scholar ] [ CrossRef ]
- ژانگ، ز. وانگ، تی. وو، اس. تانگ، اچ. لیانگ، سی. ویژگی دینامیک خاک رس قرمز در زمین لغزش عمیق، شمال غربی چین: یک مطالعه آزمایشی. مهندس جئول 2018 ، 239 ، 254-268. [ Google Scholar ] [ CrossRef ]
- فام، بی تی طبقهبندیکننده جدید بر اساس ابرمکعبهای مرکب بر روی پیشبینیهای تصادفی تکراری برای ارزیابی حساسیت زمین لغزش. جی. جئول. Soc. هند 2018 ، 91 ، 355-362. [ Google Scholar ] [ CrossRef ]
- فام، بی تی؛ Bui، DT; پورقاسمی، HR; ایندرا، پی. Dholakia، M. ارزیابی حساسیت زمین لغزش در منطقه Uttarakhand (هند) با استفاده از GIS: مطالعه مقایسه ای قابلیت پیش بینی خلیج های داخلی، شبکه های عصبی پرسپترون چند لایه، و روش های درختان عملکردی. نظریه. Appl. کلیماتول. 2017 ، 128 ، 255-273. [ Google Scholar ] [ CrossRef ]
- بیبری، SE علم داده برای پایداری شهری: داده کاوی و تفکر تحلیلی داده در موج بعدی تحلیل شهری. در شهرهای هوشمند پایدار آینده Springer: برلین/هایدلبرگ، آلمان، 2018; ص 189-246. [ Google Scholar ]
- چن، دبلیو. فن، ال. لی، سی. Pham، BT پیشبینی فضایی زمین لغزش با استفاده از ادغام ترکیبی الگوریتمهای هوش مصنوعی با نسبت فرکانس و شاخص آنتروپی در شهرستان نانژنگ، چین. Appl. علمی 2020 ، 10 ، 29. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چن، دبلیو. یان، ایکس. ژائو، ز. هونگ، اچ. Bui، DT; پرادان، ب. پیش بینی فضایی حساسیت زمین لغزش با استفاده از رگرسیون لجستیک هسته مبتنی بر داده کاوی، مدل های ساده بیز بیز و شبکه RBF برای منطقه لانگ کانتی (چین). گاو نر مهندس جئول محیط زیست 2019 ، 78 ، 247-266. [ Google Scholar ] [ CrossRef ]
- فام، بی تی؛ پراکاش، آی. سینگ، SK; شیرزادی، ع. شهابی، ح. مدلسازی حساسیت زمین لغزش Bui، DT با استفاده از درختان هرس با خطای کاهشیافته و تکنیکهای مختلف مجموعه: رویکردهای یادگیری ماشین ترکیبی. Catena 2019 ، 175 ، 203–218. [ Google Scholar ] [ CrossRef ]
- پرادان، بی. مدلسازی حساسیت زمین لغزش سامین، MI: بهینه سازی و تحلیل اثر عاملی. در کاربردهای اسکن لیزری در ارزیابی زمین لغزش ; Springer: برلین/هایدلبرگ، آلمان، 2017; صص 115-132. [ Google Scholar ]



بدون دیدگاه