1. مقدمه
بر اساس گزارش سازمان بهداشت جهانی (WHO)، سالانه نزدیک به 1.2 میلیون نفر در سراسر جهان در تصادفات رانندگی جان خود را از دست می دهند [ 1 ]. کشورهای اتحادیه اروپا مشارکت های ملی و بین المللی را برای کاهش تصادفات رانندگی در بزرگراه ها سازماندهی کرده اند و اقدامات کوتاه مدت و بلندمدتی را برای به حداقل رساندن تعداد این تصادفات اتخاذ کرده اند (چشم انداز صفر) [ 2 ]. در چند سال آینده، تحقیقات در مورد تجزیه و تحلیل ویژگی های حمل و نقل ترویج خواهد شد. هدف آن کاهش تصادفات رانندگی در کشورهای اتحادیه اروپا برای به حداقل رساندن آنها تا سال 2050 است. بنابراین، مطالعات چند رشته ای و بین رشته ای در مورد سیستم های حمل و نقل و شبکه های جاده ای توجه جامعه علمی را برای طراحی سیستم های حمل و نقل کارآمدتر در سراسر جهان جلب کرده است.
عوامل متعددی (مانند نوع وسیله نقلیه، نوع جاده، محیط و راننده) به طور مستقیم یا غیرمستقیم بر شدت تصادفات رانندگی و ایمنی جاده در بزرگراه تأثیر میگذارند. برخی از این عوامل در مطالعات تجربی و نظری مختلف آشکار شده است. تحقیقات در مورد تصادفات یا برخورد وسایل نقلیه نشان می دهد که ویژگی های راننده مهم ترین عوامل هستند. مهارت های روانی حرکتی راننده (یعنی سرعت واکنش و هماهنگی چشم، دست و پا)، ویژگی های ذهنی (یعنی ادراک، توجه و حافظه)، سطح تحصیلات، تجربه رانندگی، سن، جنسیت، عادت و ویژگی های شخصیتی (مانند خطر). گرفتن، پرخاشگری و مسئولیت) متغیرهای مستقیماً مؤثر در تصادفات و تصادفات وسایل نقلیه هستند [ 3 ، 4 ، 5 ،6 ، 7 ]. برخی از مطالعات از تحلیل زمانی و مکانی با استفاده از متغیرهای مختلف برای پیشنهاد مدلهای مختلف تصادف جادهای و ایمنی بهرهمند شدند. از این نظر، GIS به طور گسترده ای برای تعیین متغیرهای مختلف موثر بر تصادفات رانندگی در جاده های بسیار خطرناک استفاده می شود [ 8 ، 9 ، 10 ، 11 ، 12 ]. تخمین چگالی هسته (KDE) و روش پواسون نیز برای تجزیه و تحلیل تصادفات ترافیکی استفاده می شود [ 13 ، 14 ، 15] و پارامترهای هندسی جاده در محیط های GIS استفاده می شود. برای تجزیه و تحلیل ایمنی جاده ها و تصادفات ترافیکی، داده های مکانی زیادی در تکنیک های مختلف در محیط های GIS به منظور ارائه راه حل های موثر برای کاهش و جلوگیری از تعداد تصادفات ترافیکی ادغام می شوند [ 8 ، 9 ، 10 ، 11 ، 12 ، 16 ].
هندسه راه (به عنوان مثال، فوق ارتفاع و منحنی های جانبی و افقی) یک موضوع تحقیقاتی محبوب است، زیرا یکی از عوامل تعیین کننده دیگر تصادفات و تصادفات رانندگی در نظر گرفته می شود. محاسبه دستی انحنای جاده ممکن است برای ارزیابی خطرات تصادف در یک شبکه جاده ای پرهزینه باشد. به دلیل ماهیت مقرون به صرفه و صرفه جویی در زمان، تکنیک های GIS به یک روش مهم تولید داده در موضوعات مختلف فنی و علمی (به عنوان مثال، تصادفات ترافیکی و حیوانات وحشی، تکه تکه شدن زیستگاه و تعیین محدودیت های سرعت) برای پیش بینی پارامترهای هندسی تبدیل شده است. در شبکه های جاده ای [ 17 ، 18 ، 19]. به طور خاص، افزایش تعداد مطالعات به کمک GIS در تجزیه و تحلیل تصادفات رخ داده در پیچ های جاده و در برآورد ویژگی های منحنی افقی مزایای زیادی از نظر زمان و هزینه ارائه می دهد [ 20 ]. برای تخمین ویژگیهای منحنی جادهای هندسی، چندین نرمافزار و افزودنی برای محاسبه خودکار، نیمه خودکار یا دستی انواع مختلف پیچهای جاده، مانند «Curve Calculator» (ESRI، ایالات متحده آمریکا)، «Curve Finder» در دسترس هستند. [ 20 ، 21 ]، “Curvature Extension” [ 22 ]، “Road Curvature Analyst” (ROCA) [ 23 ]، و “CurvS” [ 24 ].
منحنی افقی بهعنوان یکی از ویژگیهای هندسی راه که با استفاده از روشهای کم هزینه بهدست میآید، اغلب شامل مکانهای فضایی نامربوط است که ممکن است بر دادههای مکانی جمعآوریشده تأثیر منفی بگذارد. تأثیر تعمیم در پیش بینی و دقت محاسبه عناصر منحنی افقی در GIS کاملاً تعیین کننده است [ 25 ، 26 ]. بنابراین، خطوط بردار دیجیتالی مانند جادهها باید تعمیم یا سادهسازی شوند تا میزان دقت پیشبینی بالاتری داشته باشند [ 17 ]]. استانداردهای کلی شبکه های جاده ای دیجیتالی شده در پیش بینی ویژگی های منحنی افقی با استفاده از روش های اتوماتیک و نیمه اتوماتیک معمولاً بدون جزئیات بیشتر تنظیم می شوند. با این حال، این روشها جریانهای کاری استانداردی را در مورد خط بردار جاده بهدستآمده با استفاده از روشهای مختلف و تأثیر تحمل تعمیم ارائه نمیدهند. داده های مربوط به سازه های خطی مانند شبکه جاده ای در قالب بردار خط دیجیتال ذخیره می شود. داده های برداری شبکه راه با استفاده از روش های مختلف با دقت و دقت مکانی متفاوت به دست می آید. نرم افزارهای تشخیص منحنی نیمه خودکار و خودکار برای انجام موفقیت آمیز به داده های با کیفیت بالا نیاز دارند [ 21]. بنابراین توجه به عملکرد و دقت نرم افزار تحلیل شعاع منحنی های افقی کوچک ضروری است که به کاربران GIS کمک می کند تا اطلاعات قابل اعتمادی را در مورد بخش های جاده به دست آورند. بر این اساس، پرداختن به عواملی که بر دقت جغرافیایی دادههای نقشهکشی و دیجیتالی بهدستآمده از تجزیه و تحلیل پیچیده GIS تأثیر میگذارند، اهمیت دارد [ 27 ، 28 ].
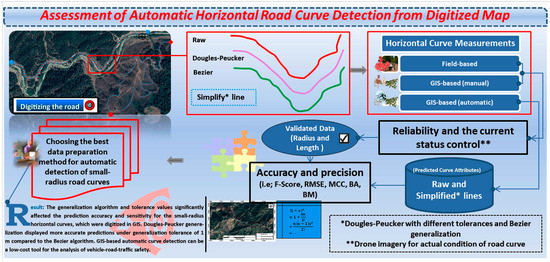
سهم اصلی این مطالعه ارزیابی این بود که آیا ویژگیهای هندسه منحنی افقی پیشبینیشده بهطور خودکار در یک GIS میتواند برای مدلسازی هندسه جادهای-خودرو-حادثه استفاده شود، و اینکه آیا تأثیر الگوریتمهای تعمیم بر موفقیت پیشبینی منحنی افقی وجود دارد یا خیر. هدف از این مطالعه تجزیه و تحلیل دقت پیشبینی منحنیهای جاده افقی با شعاع کوچک در دو جاده دیجیتالی شده است. ابزار محاسبه خودکار منحنی جاده، که در محیط GIS مورد استفاده قرار گرفت، برای پیچهای افقی کوچک جادهها انجام و آزمایش شد. شعاع و طول منحنی افقی نیز به صورت میدانی اندازه گیری و محاسبه شد. از آنجایی که جاده یک بردار خط دیجیتال بود، تأثیر ضریب تعمیم و دقت الگوریتم برای مجموعه داده نیز مورد ارزیابی قرار گرفت. سپس، با استفاده از اطلاعات منحنی افقی بهدستآمده از GIS، دو جاده مختلف گروهبندی و مورد مقایسه آماری قرار گرفتند. به طور خلاصه، هدف اصلی نیز ارائه داده های امن، آسان، سریع و موثر در تشخیص منحنی های افقی خطرناک با استفاده از تکنیک های GIS بود.
2. مواد و روشها
2.1. منطقه مطالعه
در این تحقیق، بخشهای جادهای روستایی و جنگلی دو بانده با پیچهای تند و خطرناک، استانداردهای هندسی پایین و حجم ترافیک کم مورد بررسی قرار گرفت. این دو جاده در محدوده منطقه اندیرین در استان قهرمان مراس در شرق منطقه مدیترانه ترکیه قرار دارند. طول راه های کم حجم در این مطالعه، یعنی یک جاده روستایی و یک قطعه جاده جنگلی، به ترتیب تقریباً ≅6900 متر و ≅3400 متر است و در یک منطقه کوهستانی با ساختار زمین شیب دار قرار دارند ( شکل 1). ).
2.2. تجهیزات
Leica Disto s910 برای اندازه گیری ویژگی های هندسی جاده و Garmin Oregon 600 GPS handheld برای جمع آوری داده های مکانی استفاده شد. یک پهپاد (DJI Phantom 4) و یک دوربین 12 مگاپیکسلی نیز برای تصاویر دید پرنده از منطقه مورد مطالعه استفاده شد [ 29 ]. نرم افزار ArcGIS و افزونه آن (یعنی ROCA) برای پیش بینی ویژگی های منحنی، ذخیره سازی و پردازش داده های برداری و نقشه برداری استفاده شد. یک رایانه رومیزی با حافظه دسترسی تصادفی (RAM) i7 16 گیگابایتی (GB) برای پردازش داده ها استفاده شد.
یک نقشه توپوگرافی 1/25000 و تصاویر ماهواره ای Google Earth به عنوان مبنایی برای دیجیتالی کردن جاده ها و اندازه گیری دستی عناصر منحنی استفاده شد. منحنی ها در ArcGIS با افزونه Road Curvature Analyst (ROCA) [ 23 ] شناسایی شدند و با استفاده از اتصال فضایی، تقاطع، پردازش همپوشانی و نقشه برداری [ 30 ] تجزیه و تحلیل شدند.
2.3. آماده سازی داده ها و پایگاه داده
جاده ها در تصاویر ماهواره ای Google Earth در یک محیط GIS در مقیاس ترسیمی 1/4000 توسط کاربری با حداقل 10 سال تجربه دیجیتالی شدند. سپس جاده های دیجیتالی شده از طریق نقشه توپوگرافی با مقیاس 1/25000 بررسی شدند. WGS84 UTM Zone 37 به عنوان یک سیستم طرح ریزی فضایی استفاده شد. داده های به دست آمده به عنوان داده های ShapeFile (*.shp) پردازش و ذخیره شدند.
دادههای منحنی افقی، که بهصورت دستی از تصاویر ماهوارهای (ASat) بهدست آمدهاند، با استفاده از ابزار ماشینحساب میدانی به جداول ویژگی متصل شدند. برای حذف رئوس رسم در بخشهای جادهای که به صورت دستی در یک محیط GIS دیجیتالی شدهاند، باید بردارهای خط دیجیتال سادهسازی شوند. بنابراین، به منظور آشکار کردن تأثیر تعمیم بر محاسبه خودکار منحنیهای افقی، دادههای بردار خط دیجیتال با و بدون تعمیم (ANoT) تولید و به گروههای داده مختلف تقسیم شدند. در نتیجه، 20 داده بردار خط دیجیتال مختلف برای جاده های روستایی (A) و جنگلی (B) تولید شد. الگوریتم های تعمیم داگلاس-پوکر و بزیه به منظور حذف رئوس رسم با در نظر گرفتن تحمل تعمیم 20 سانتی متر، 40 سانتی متر، 60 سانتی متر، 80 سانتی متر، 1 متر، 2 متر، 3 متر و 4 متر استفاده شد.شکل 2 مفاهیم کلی این تحقیق را نشان می دهد.
2.4. اندازه گیری منحنی های افقی
تصاویر ماهواره ای و بردارهای خط دیجیتال در یک محیط GIS همپوشانی شدند. پس از آن، نقطه شروع (PC) و نقطه پایان (PT) انحنا پیدا شد و روی تصویر با وضوح بالا مشخص شد و لایه نقطه دیجیتال ذخیره شد. PC و PT برای ایجاد یک آکورد (C) ترکیب شدند. نقطه میانی وتر (MC) به دورترین نقطه (مماس منحنی = ToC) در منحنی جاده متصل شد. بنابراین، یک چند خط به منظور تعیین یک ارتین میانی (MO)، که فاصله بین MC و ToC بر روی انحنا است، رسم شد. سپس، رابطه بین طول C (CL)، MO، و شعاع (R) محاسبه شد ( شکل 3 ). در نهایت داده ها در جداول ویژگی های لایه های مرتبط تعریف شدند.
جاده های مستقیم (مماس) و منحنی ها با استفاده از ArcGIS بر اساس نقاط PC و PT از یکدیگر جدا شدند. پس از آن، طول منحنی افقی در پایگاه داده ویژگی محاسبه شد و یک معادله شعاع ریاضی (معادله (1)) برای محاسبه مقادیر شعاع [ 31 ] استفاده شد.
2.5. اندازه گیری های میدانی
اندازهگیریهای میدانی برای هر منحنی افقی در جاده به لطف یک برد یاب لیزری انجام شد. برای تعیین مکان در نقشه میدانی از GPS دستی استفاده شد. از روش “طول وتر” برای محاسبات استفاده شد، که در آن سه اندازه گیری مخالف در دو طرف داخلی و خارجی منحنی بین نقاط PC، ToC و PT روی منحنی افقی انجام شد ( شکل 3 ). نقاط مبهم در ابتدا و انتهای منحنی با استفاده از یک هواپیمای بدون سرنشین در ارتفاع کمتر از 120 متر، همانطور که توسط قانون مشخص شده است، بررسی شد ( شکل 4 ). علاوه بر این، شرایط فعلی هر دو جاده بررسی شد.
تمام نقاط منحنی بر اساس نقاط روی یک فنر مارپیچ به جای خطوط مماس مجاور محاسبه شد. دادههای نقطهای پیچهای اندازهگیری شده از حاشیههای جاده مخالف بهدست آمد. برای یافتن شعاع انحنای واقعی و نقطه وسط جاده، دو اندازه گیری متفاوت مخالف در ابتدا و انتهای پیچ انجام شد. سپس، منحنی در نقطه میانی جاده برای محاسبه شعاع منحنی استفاده شد. مقدار محاسبه شده با استفاده از این روش، شعاع واقعی در نظر گرفته شد و با مقدار پیش بینی شده با استفاده از تصاویر ماهواره ای مقایسه شد [ 31 ، 32 ].
2.6. مفهوم اصلی ابزار تشخیص خودکار منحنی
در این مطالعه، ROCA، که شامل ایده طبقه بندی کننده ساده بیز است، به عنوان جعبه ابزار برای ArcGIS [ 23 ] مورد بررسی قرار گرفت. مراحل اصلی شامل تعمیم دادههای جادهای دیجیتالی، محاسبه متغیرهای توضیحی، و تجزیه و تحلیل دادههای شبکه جادهای تعمیمیافته با استفاده از آموزش و مجموعه دادههای آزمایشی است. همچنین امکان ایجاد مجموعه داده های آموزشی مختلف برای افزونه GIS وجود دارد. سپس مدل شامل فرآیند طبقه بندی، محاسبه شعاع و استفاده از اکتشافات [ 17 ] است. جزئیات بیشتر در مورد افزودنی ROCA و داده های آموزش تجزیه و تحلیل منحنی افقی را می توانید در https://roca.cdvinfo.cz/downloads/ (در 19 سپتامبر 2022 در دسترس قرار دهید) پیدا کنید.
2.7. مقایسه داده ها
اندازهگیریهای میدانی و مبتنی بر GIS نقش مرجعی در مشاهده شرایط فعلی در منطقه مورد مطالعه و پیشبینی دقیق شعاع و طول منحنی داشتند. برای اعتبارسنجی ویژگیهای منحنی اندازهگیری دستی مبتنی بر GIS، مقادیر مجموع میانگین مربعات خطا ( RMSE ) به عنوان یک معیار خطا در نظر گرفته شد (معادله (2)). خطی بودن نیز برای رابطه بین شعاع و طول منحنی جاده برای اندازهگیری میدان و تصویر در نظر گرفته شد. بنابراین، تفاوت بین مقادیر شعاع و طول در اندازهگیریهای کنترل و میدان بر مبنای ریاضی تعریف شد. این مرحله برای اطمینان از محاسبه قابل اعتماد پیشبینی ویژگی منحنی خودکار مبتنی بر GIS انجام شد.
واحدهای نمونه برداری با وضوح 10 × 10 متر برای ارزیابی عملکرد پیش بینی تشخیص منحنی خودکار مبتنی بر GIS طراحی شدند. جاده و واحدهای نمونه برای محاسبه حساسیت ویژگیهای منحنی پیشبینیشده تقاطع شدند. تجزیه و تحلیل درست / نادرست در جدول ماتریس سردرگمی برای محاسبه حساسیت پیشبینی منحنی در واحدهای نمونهگیری از طریق معادلات (3) – (6) انجام شد. بنابراین، دقت پیشبینی با استفاده از تجزیه و تحلیل F-Score به صورت مثبت واقعی ( TP )، مثبت کاذب ( FP = خطای کمیسیون)، و منفی کاذب ( FN = خطای حذف) ارزیابی شد. F-Score همانطور که در رابطه (3) داده شده محاسبه شد. در این فرمول، TPنشان دهنده عدد منحنی به درستی تشخیص داده شده است، FP نشان دهنده بخش منحنی اضافی است که در منطقه وجود ندارد، و FN به منحنی هایی اشاره دارد که در ناحیه مورد مطالعه وجود دارند اما در منطقه مورد مطالعه قابل شناسایی نیستند. از آنجایی که مقادیر F-Score گاهی اوقات به احتمال زیاد مغرضانه هستند، سایر اندازه گیری های متریک نیز در نظر گرفته شدند [ 33 ]. بنابراین، ضریب همبستگی ماتیوس ( MCC ) (معادله (4)) [ 34 ]، دقت متوازن ( BA ) (معادله (5)) و اطلاعات کتابساز ( BM ) (معادله (6)) نیز به عنوان معیارهای متریک مورد استفاده قرار گرفتند.
برای گروه های داده از آزمون همگنی و نرمال بودن استفاده شد. هنگامی که آنها توزیع همگن را نشان دادند، ANOVA ( 0.05 < p ) و Kruskal-Wallis برای مقایسه گروهی و داده های گروه ناپارامتریک استفاده شد. عبارات زیر برای مقایسه مقادیر شعاع و طول منحنی افقی فرض شد.
-
H0: شعاع منحنی در گروه های مختلف برای جاده روستایی تفاوت معنی داری با یکدیگر ندارند.
-
H1: مقادیر طول منحنی در گروه های مختلف برای جاده روستایی به طور قابل توجهی با یکدیگر متفاوت است.
-
H0 a : مقادیر شعاع منحنی در گروه های مختلف برای جاده جنگلی تفاوت معنی داری با یکدیگر ندارند.
-
H1 a : مقادیر طول منحنی در گروه های مختلف برای جاده جنگلی به طور قابل توجهی با یکدیگر متفاوت است.
3. نتایج
3.1. مقایسه داده های منحنی به دست آمده از اندازه گیری های میدانی و مبتنی بر GIS
در این مطالعه، مقادیر شعاع و طول منحنی بهدستآمده از تصاویر ماهوارهای با وضوح بالا به کمک GIS با اندازهگیریهای میدانی مقایسه شد ( شکل 5 ). اندازهگیریهای اندازهگیری شده با GIS و اندازهگیریهای میدانی برای طول و شعاع منحنی افقی جادههای روستایی ( شکل 5 الف) و جنگلی ( شکل 5 ب) خوب بودن خط تناسب را با R2 نشان میدهند .. مجموع RMSE که یک مقدار پارامتریک است، برای 30 مقدار منحنی اندازهگیری شده در جاده روستایی و 29 مقدار منحنی اندازهگیری شده در جادههای جنگلی محاسبه شد. RMSE برای شعاع و طول منحنی در جاده روستایی به ترتیب 22.86 متر و 22.99 متر محاسبه شد. همچنین، RMSE برای شعاع و طول منحنی در جاده جنگلی به ترتیب 16.17 متر و 8.63 متر محاسبه شد. بعداً مشخص شد که برخی از کارهای نگهداری و تعمیرات در جاده جنگلی (مانند تعریض در برخی پیچ ها) انجام شده است. به همین ترتیب، چند تکه آسفالت روی راه روستایی اجرا شده است که تغییری در ساختار هندسی و تراز آن ایجاد نکرده است. محاسبه و اندازهگیری منحنی با استفاده از تصاویر ماهوارهای با پشتیبانی GIS زمان کمتری نسبت به مطالعات میدانی گرفت.
3.2. محاسبه پیچ های راه روستایی
از آنجایی که گروه ها بر اساس مقادیر مختلف تحمل تعمیم ارزیابی شدند، مقادیر منحنی متفاوتی در هر روش یافت شد، به جز آنهایی که تحمل تعمیم 20 سانتی متر و 40 سانتی متر داشتند. اگرچه میانگین شعاع منحنی در گروههای داده به جز گروههایی که تحمل تعمیم 20 سانتیمتر و 40 سانتیمتر داشتند متفاوت بود، میانگین طول منحنی در همه گروهها متفاوت بود. میانگین طول منحنی در گروه های با تحمل تعمیم 20 سانتی متر و 40 سانتی متر محاسبه شده در GIS تا حدی مشابه بود. تعداد ASat (اندازه گیری منحنی مبتنی بر ماهواره از جاده آسفالته)، A20cm (روش داگلاس-پوکر با تحمل تعمیم 20 سانتی متر) و A40cm 30 منحنی بود. حداقل و حداکثر شعاع و طول پیشبینیشده در گروههای داده با تحمل تعمیم بر حسب سانتیمتر مشابه بود. بر اساس داده های تعمیم الگوریتم بزیر، تعداد منحنی های محاسبه شده (ABez) در مقایسه با منحنی های پیش بینی شده بسیار بیشتر بود. داده های منحنی آماری محاسبه و پیش بینی شده در GIS برای راه روستایی در خلاصه شده استجدول 1 .
3.3. محاسبه منحنی جاده های جنگلی
مشابه راه روستایی، تعداد منحنی ها، شعاع ها و طول ها در گروه های داده های مختلف برای جاده جنگلی نیز محاسبه شد. از آنجایی که این مطالعه بر روی منحنی هایی با حداکثر شعاع منحنی 100 متر تمرکز دارد، داده های آماری مربوط به گروه های کنترل در جدول 2 آورده شده است.. مشاهده میشود که مقادیر متفاوتی از منحنیها و مقادیر طول منحنی به دلیل مقادیر تعمیم در خط جاده محاسبه شدهاند، به جز موارد بدون تعمیم و با تحمل تعمیم 20 سانتیمتر، 60 سانتیمتر و 1 متر. تجزیه و تحلیل رابطه آماری بین شعاع منحنی محاسبهشده با استفاده از تصاویر ماهوارهای و بردارهای خط دیجیتالی شده با تحمل تعمیم 20 سانتیمتر، 40 سانتیمتر، 60 سانتیمتر و 1 متر، پیشبینیهای مشابهی با اختلاف میانگین جزئی به دست آورد. بیشترین تعداد پیچ ها در جاده با تعمیم بزیر پیش بینی شد. از سوی دیگر، تعداد پیچهای پیشبینیشده در جادههای با تحمل تعمیم ۲ متر یا بالاتر کمتر بود.
3.4. دقت پیش بینی برای جاده روستایی
راه های انتخاب شده برای گروه های آزمایشی به 437 واحد نمونه برداری مساوی برای راه روستایی تقسیم شدند ( شکل 6 ). یک ماتریس خطا در محیط GIS برای میزان دقت پیشبینی در همه گروهها ایجاد شد. راه های روستایی به منظور مشاهده هرگونه پیش بینی منحنی در هر واحد به واحدهای نمونه تقسیم شدند. توزیع فضایی تحلیل درست-کاذب برای جاده روستایی در شکل 6 نشان داده شده است. مشاهده کردیم که نرخهای دقت پیشبینی منحنی در گروهها ( شکل 6 b-f,h-k) با و بدون تحمل تعمیم به طور قابلتوجهی در استانداردهای منحنی کوچک افزایش یافته است، به استثنای گروههایی که تحمل تعمیم 1 متر دارند ( شکل 6 g).
امتیاز F، (معادله (3))، ضریب همبستگی ماتیوس (MCC) (معادله (4))، دقت متوازن (BA) (معادله (5)) و اطلاعات کتابساز (BM) (معادله (6)) در نظر گرفته شد. حساب در تحلیل بر اساس این معیارها، منحنیهای اندازهگیری شده به صورت دستی بر روی تصاویر ماهوارهای و نرخهای دقت پیشبینی 10 گروه آزمون بهدستآمده از تجزیه و تحلیل ROCA منحنیها با و بدون مقدار تحمل تعمیم محاسبه شد. نتایج نشان داد که دادههای منحنی با استفاده از محیط GIS نرخهای دقت پیشبینی متفاوتی را بسته به ضرایب تعمیم و الگوریتمهای مختلف نشان میدهند. همچنین مشاهده شد که بالاترین میزان دقت پیشبینی در پیچهای جاده دیجیتالی شده با تحمل تعمیم 20 سانتیمتر و 1 متر با استفاده از روش داگلاس-پیکر بهدست آمد ( جدول 3).). از سوی دیگر، موفقترین دادههای گروه آزمایش مربوط به روش داگلاس-پوکر با تحمل تعمیم 1 متر (A1m) بود.
3.5. روابط آماری بین گروه های کنترل و آزمایش برای پیچ های جاده روستایی
شعاع منحنی بهدستآمده از گروههای داده در جاده روستایی، توزیع همگنی را نشان میدهد ( 0.05 > p، 0.752 = p ، 0.620 = F)، که H0 را تأیید میکند. به عبارت دیگر، از نظر آماری تفاوت معنی داری بین گروه های داده مشاهده نشد. با این حال، تا آنجا که به مقادیر میانگین مربوط می شود، تفاوت آماری معنی داری بین گروه های داده با و بدون تعمیم داگلاس-پیکر و بزیر مشاهده شد ( شکل 7 ).
مشابه جاده جنگلی، مقادیر طول منحنی برای جاده روستایی توزیع همگنی را نشان نداد. بنابراین از آزمون کروسکال والیس به جای آنالیز ANOVA استفاده شد. نتایج آزمون (χ 2 = 158.561، p <0.005) تفاوت آماری معنیداری را بین گروههای داده نشان داد که با H1 در تضاد است. بنابراین می توان بیان کرد که از نظر آماری تفاوت معنی داری بین گروه های داده مشاهده شد. انحراف معیار در بین گروه های کنترل، یعنی ASat، A20cm، A1m و ANoT تا حدی مشابه بود. بنابراین، زمانی که انحراف معیار در همه گروه ها محاسبه شد، از نظر آماری تفاوت معنی داری در بین همه گروه ها مشاهده شد ( شکل 6 ).
تفاوت بین میانگین طول شعاع محاسبهشده با استفاده از ANoT و ASat برای جاده روستایی (01/2± متر) در مقایسه با سایر گروههای کنترل کمتر بود، در حالی که تفاوت بین میانگین شعاع منحنی محاسبهشده با استفاده از A20cm و ASat (75/5± متر) در مقایسه با گروه کنترل کمتر بود. به گروه های دیگر
3.6. دقت پیشبینی برای جاده جنگلی
توزیع فضایی تحلیل درست/کاذب برای جاده جنگلی در شکل 8 نشان داده شده است . دویست و سیزده (213) سایت نمونه برای جاده جنگلی انتخاب شدند ( شکل 8 الف). یک ماتریس خطا در یک محیط GIS برای میزان دقت پیشبینی در همه گروههای داده تولید شد. گروههای داده با تحمل تعمیم 20 سانتیمتر و 40 سانتیمتر در واحدهای نمونهبرداری مدلسازیشده در GIS حساسیت مشابهی را برای همترازی جادهها و پیشبینیهای منحنی نشان دادند ( شکل 8 c,d). با این حال، مشاهده شد که میزان دقت پیشبینی منحنی و تراز جاده برای تحمل تعمیم بالاتر از 1 متر و تعمیم الگوریتم Bezier کاهش یافت ( شکل 8).h–k). واحدهای نمونه گیری ممکن است تفاوت هایی را در تحلیل نقشه نشان دهند.
مشابه راه روستایی، از آنجایی که تحلیل آماری برای جاده جنگلی به حداکثر شعاع منحنی 100 متر محدود شده است، بالاترین میزان دقت پیشبینی در گروههایی با تحمل تعمیم 80 سانتیمتر و 1 متر با استفاده از الگوریتم داگلاس-پوکر به دست آمد. همچنین میزان دقت پیشبینی منحنی در گروههای داده بدون تعمیم و با تحمل تعمیم 20 سانتیمتر و 40 سانتیمتر مشابه یکدیگر بود. با توجه به تجزیه و تحلیل درست/کاذب واحدهای نمونهگیری، گروههای داده با تحمل تعمیم 0 متر و 2 متر نرخ دقت پیشبینی بالاتری را در مقایسه با سایر مقادیر تحمل تعمیم نشان دادند ( جدول 4 ).
3.7. روابط آماری بین گروه های کنترل و آزمایش برای منحنی های جاده جنگلی
شعاع منحنی بهدستآمده از گروههای داده برای جادههای جنگلی، توزیع همگنی را نشان میدهد ( p > 0.05، p = 0.733، F = 0.691)، که H0 a را تأیید میکند. تفاوت آماری بین مقادیر میانگین در دادههای گروه کنترل به نسبت الگوریتم داگلاس-پوکر افزایش مییابد. در همین راستا، مشابه ترین مقادیر منحنی میانگین در گروه های داده با تحمل تعمیم 1 متر مشاهده شد ( شکل 8 ). به دلیل انحراف معیار مشابه در همه گروههای داده، تفاوت آماری معنیداری بین مقادیر میانگین مشاهده شد. مقادیر طول منحنی در میان گروههای داده توزیع همگنی را نشان نداد و Kruskal-Wallis به جای ANOVA اعمال شد. نتایج آزمایش (χ2 = 127.152، p <0.005) با H1 a در تضاد است. بنابراین، هیچ رابطه آماری بین مقادیر طول منحنی در گروه های داده پیدا نشد. تا آنجا که به مقادیر میانگین مربوط می شود، گروه های داده بدون تعمیم و با تحمل تعمیم 0.2 متر و 1 متر با استفاده از الگوریتم داگلاس-پوکر در مقایسه با مقادیر طول منحنی در سایر گروه های داده مشابهت بیشتری داشتند ( شکل 9 ).
از سوی دیگر، تفاوت بین مقادیر میانگین طول منحنی محاسبه شده با استفاده از BNoT و B1m برای جاده جنگلی (1.14± متر) که شعاع منحنی افقی کمتری داشت، در مقایسه با سایر گروههای کنترل کمتر بود. با این حال، در مقایسه با گروه های دیگر، تفاوت بین میانگین شعاع منحنی محاسبه شده با استفاده از B20cm و BSat (±0.25 متر) کمتر است.
4. بحث
ارزیابی این مطالعه با استفاده از داده های دیجیتالی شدن جاده های موجود با توجه به برآورد موفقیت در پارامترهای منحنی جاده انجام شد. ما روش کنترل دقت را با اثر تعمیم / ساده شده مختلف بر روی تخمین خودکار ویژگیهای جاده (شعاع منحنی، طول و تعداد) پیشنهاد کردیم.
معمولاً برای انجام اندازهگیریهای شبکه جادهای در محل، استفاده از روشهای دستی/سنتی به زمان طولانی و هزینه بالایی نیاز دارد. فتوگرامتری، اسکنرهای لیزری هوایی، و اسکنرهای لیزری زمینی که در منطقه مورد مطالعه انجام میدهند، که همچنین تعداد مراحل پرهزینه و زمانبر در اندازهگیری میدانی را افزایش میدهند، کمک زیادی به اندازهگیریهای میدانی خواهند کرد [ 35 ]. روش دیگر، تکنیک های یادگیری بینایی می تواند ویژگی های منحنی جاده را از تصاویر هوایی یا ماهواره ای تشخیص دهد [ 36 ]. با این حال، تشخیص هندسه منحنی با استفاده از تکنیکهای پیشرفته بینایی رایانهای فعلی برای شبکههای جادهای در مقیاس بزرگ هنوز محدود است. به طور خلاصه، تمام تکنیک های مورد استفاده در تشخیص منحنی دارای مزایا و معایب هستند [ 16]. تجزیه و تحلیل دادههای برداری در شبکههای جادهای دیجیتالی در یک GIS به جای تکنیکهای پیشرفته پردازش تصویر و تجهیزات گرانقیمت نقشهبرداری به پردازندهها و هزینههای کمتری نیاز دارد.
شکی نیست که دقت پیشبینی تشخیص خودکار و نیمه خودکار برای عناصر هندسی جاده تحت تأثیر فناوری اندازهگیری دادههای مکانی است. اطمینان از صحت، وضوح، مقیاس و دقت داده های مورد استفاده در GIS برای به دست آوردن ویژگی های هندسی جاده ها بسیار مهم است. از آنجایی که اندازهگیریهای ویژگیهای هندسی جادهها از تشخیص و محدوده نور (LiDAR) به دست میآیند، چنین ابزاری با دقت مکانی بالا و دقیق، امروزه هنوز بحثبرانگیز هستند [ 37 ، 38 ، 39 ].]. تشخیص منحنی به کمک GIS، که هنوز جایگزینی برای فناوری LiDAR است، یک تکنیک مقرون به صرفه و صرفه جویی در زمان است. روشهای نوآورانه و سنتی (تصاویر دیجیتال، نقشه و نقشهبرداری راه مبتنی بر سیستم موقعیتیابی جهانی) [ 40 ، 41 ، 42 ] همچنین خطر تولید دادههای نسبتاً با کیفیت پایین و حساستر را به دنبال دارد که انجام مطالعات دقیق را ضروری میسازد. در مورد امکان سنجی
استفاده از فناوری در تحقیقات علمی، به دست آوردن داده ها از این حوزه را آسان می کند. به عنوان مثال، انواع مختلفی از ویژگی های هندسی جاده، مانند شعاع منحنی، طول، نقطه میانی و زاویه، می توانند به طور خودکار در واحد نمونه برداری جاده در عرض چند ثانیه تولید شوند [ 43 ]. در مقایسه با مدت زمان و هزینه اندازهگیریهای میدانی، محاسبه خودکار دادههای منحنی افقی در GIS مزایای زیادی برای کارشناسانی که ایمنی وسایل نقلیه جادهای را مطالعه میکنند، دارد.
تعداد نقاط مکانی در محاسبه دقت و حساسیت پیشبینی شعاع منحنی افقی در GIS مستقیماً با دقت پیشبینی ماشین حساب منحنی متناسب بود، در حالی که منحنی یاب و گسترش انحنا تحتتاثیر توالی نقاط فضایی (راس) قرار نگرفتند [ 28 ]. ، 44 ]. در تجزیه و تحلیل حساسیت ROCA مشاهده شد که الگوریتم های تعمیم و تحمل ها تأثیر قابل توجهی بر نتایج دارند ( جدول 3 و جدول 4 ) [ 17 ]]. بنابراین، برای مقایسه عملکرد تخمین هندسه منحنی، می توان توضیح داد که انجام اندازه گیری در محل در طول مسیر به جای یک نقطه واحد، موثرتر است. الگوریتم داگلاس-پوکر که در تجزیه و تحلیل منحنیهای شعاع کوچک در این مطالعه استفاده شد، نرخ دقت پیشبینی منحنی را برای خط بردار دیجیتالی با تحمل تعمیم 20 سانتیمتر و 1 متر افزایش داد. معیارهای عملکردی مختلف (مانند F-Score، MCC، BA، و BM) نشان دادند که دقت پیشبینی الگوریتم Bezier برای مقادیر میانگین منحنی شعاع و طول نسبتاً پایین بود. این ممکن است به فراوانی نقاط اعمال شده در GIS یا تأثیر مقیاس ترسیمی نسبت داده شود. از این نظر، مقیاس ترسیمی بزرگتر (> 1/4000) برای خطوط شبکه راه در مناطق کوهستانی احتمالاً عملکرد پیشبینی را افزایش میدهد. برای رابطه آماری بین گروه های آزمون و کنترل، یک رابطه آماری معنی دار بین شعاع منحنی افقی محاسبه شده وجود دارد که H0 و H0 را تأیید می کند.یک _ با این حال، هیچ رابطه آماری معنی داری بین طول منحنی مشاهده نشد که با H0 و H0 a دو جاده در تضاد بود.
عملکرد نرم افزار در محاسبه خودکار یا نیمه خودکار داده های منحنی افقی در یک محیط GIS در برخی از مطالعات ارزیابی شده است. نرخ دقت پیشبینی مدلهایی مانند ماشینحساب منحنی، منحنی یاب، گسترش انحنا و ROCA به ترتیب 78، 69، 80، و 95 درصد گزارش شده است [ 23 ، 28 ].]. با توجه به نتایج تشخیص منحنی شعاع کوچکتر، عملکرد تشخیص ROCA روند نزولی دارد. داده های آموزش دیده، که توسط مالک برنامه افزودنی ارائه شده است، ممکن است برای شعاع منحنی کوچک تجدید نظر شود. ما فرض میکنیم که نتایج قابل اعتمادتری میتوان به دست آورد. مشاهده کردیم که افزایش تعداد منحنیهای شناساییشده با استفاده از بردار خط دیجیتال با تعمیم الگوریتم Bezier حساسیت پیشبینی را در منحنیهای کوچک افزایش میدهد. داگلاس-پوکر با مقدار تلورانس ترجیحی در تخمین دقت پارامترهای هندسی بسیار مهم است. به دلیل استفاده از ارزش تحمل بالا در طول فرآیند تعمیم، بخش های جاده بسیار نزدیک با شعاع های کوچک می تواند منجر به مشکلات خود تقاطع شود [ 26 ]]. علاوه بر این، خطاهای طول منحنی برآورد شده بزرگتر از شعاع تخمین زده شده است. بنابراین، این مطالعه ممکن است عملکرد متفاوتی را در تشخیص و پیشبینی شبکههای جادهای دیجیتالی در یک خط مستقیم یا صاف یا منحنی جاده افقی نشان دهد [ 45 ].
5. نتیجه گیری و کار آینده
این مطالعه نشان میدهد که تشخیص خودکار منحنی بر اساس مفهوم GIS و چگالی نقطهای خطوط دیجیتالی که خطوط جاده را نشان میدهند مستقیماً بر دقت پیشبینی و حساسیت تشخیص منحنیهای افقی با شعاع کوچک تأثیر میگذارد. مشخص شد که دقت پیشبینی تعداد منحنیهای افقی، همراه با مقادیر شعاع و طول منحنی، بسته به مقادیر مختلف تحمل متفاوت است. بنابراین، مقادیر مختلف تحمل تعمیم را می توان برای بهبود دقت و حساسیت پیش بینی برای شعاع و طول منحنی استفاده کرد. برای منحنیهای افقی با شعاع کوچک، الگوریتم داگلاس-پوکر بهتر از بزیر عمل میکند.
نتایج این مطالعه نشان داد که الگوریتم تعمیم و مقادیر تحمل به طور قابل توجهی بر دقت پیشبینی و حساسیت منحنیهای افقی شعاع کوچک که در GIS دیجیتالی شدهاند، تأثیر میگذارد. مشاهده می شود که در عملکرد تشخیص منحنی افقی دو جاده، MC و BM نسبت به سایر معیارها به خطا حساس تر هستند ( جدول 3 و جدول 4).). از این نظر، مطالعات آینده باید از معیارهای متریک برای تجزیه و تحلیل درست/نادرست در سایتهای نمونه مربوطه خود برای یافتن روش تعمیم و تحمل بهینه بهره ببرند. بنابراین، احتمال بیشتری وجود دارد که هندسه منحنی را مطابق با مقدار تحمل تعمیم مناسب برای اهداف خاص مطالعه خود پیشبینی کنند. این یک رویکرد عملی و مقرون به صرفه است که پتانسیل استفاده از داده های هندسی جاده را به عنوان یک متغیر تصمیم گیری در مدل های تصادفات ترافیکی جاده ای مبتنی بر GIS افزایش می دهد. ابزارهای به کمک GIS، که به طور خودکار پارامترهای هندسی منحنیهای شعاع کوچک را محاسبه میکنند، یک تکنیک امیدوارکننده برای مطالعات مرتبط با حملونقل هستند. محاسبه خودکار داده های منحنی افقی با استفاده از ابزار GIS مزایای زیادی دارد. با این حال، روش مبتنی بر GIS دارای محدودیت در عدم شناسایی موثر انواع پیچ های جاده است. دادههایی که میتوانند در تجزیه و تحلیل تخمینهای سرعت عبور از منحنی ایمن و زمانهای حمل و نقل وسایل نقلیه واکنش اضطراری در محیط GIS استفاده شوند، میتوانند در جادههای با شعاع کم که کار میدانی دشوار و خطرناک است تولید شود. می توان آن را به عنوان مجموعه داده های اطلاعات جاده به سیستم های ناوبری خودرو اضافه کرد.
در مطالعه بعدی، منحنی هایی که به طور بالقوه برای شبکه جاده ها خطرناک هستند، شناسایی خواهند شد. سپس اطلاعات هندسی منحنی که به عنوان یک متغیر در نظر گرفته می شود، بر اساس نوع وسیله نقلیه، سطح جاده، سرعت و واژگونی و لغزش مورد تجزیه و تحلیل قرار می گیرد. در نتیجه با تشخیص منحنی های افقی که با استانداردها مطابقت ندارند، روشی مقرون به صرفه برای انجام اقدامات احتیاطی لازم برای وسایل نقلیه اضطراری و سنگین آشکار می شود.












بدون دیدگاه