

کلید واژه ها:
استخراج جاده ; تصاویر سنجش از دور ; تقسیم بندی معنایی ; یادگیری عمیق ؛ مکانیسم توجه
1. مقدمه
2. آثار مرتبط
3. مواد و روشها
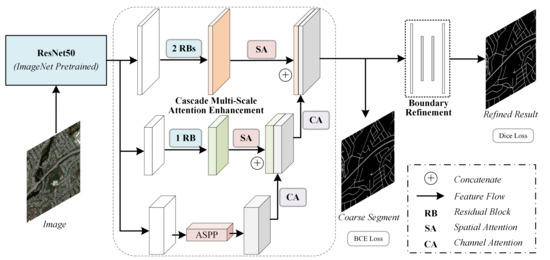
3.1. بررسی اجمالی
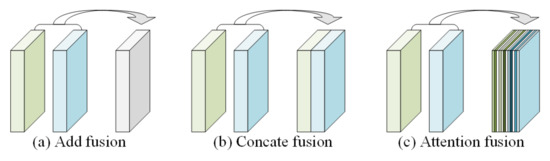
3.2. افزایش ویژگی توجه آبشاری
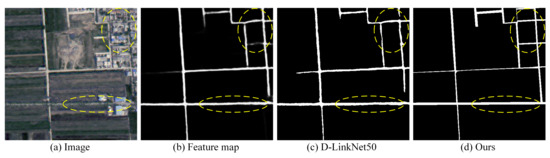
3.3. بهینه سازی مرز درشت به ریز
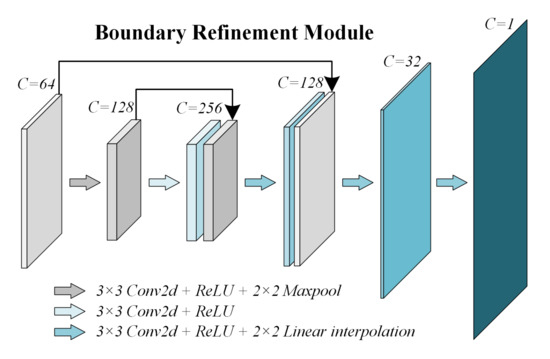
U-Net اضافه شده با توجه به پیچیدگی مدل، سبک وزن است. همانطور که در شکل 7 نشان داده شده است، در انتهای یک شاخه تقسیم بندی متصل می شود و شامل دو واحد رمزگذاری با تعداد کانال های ویژگی کم است تا ویژگی های بهبود یافته را به طور موثر اصلاح کند . تابع تلفات متقاطع آنتروپی استخراج ویژگی را بهینه میکند و تابع تلفات تاس به پالایش مرز جاده میرسد که ساختار استخراج جادهای درشت به ریز را تشکیل میدهد. زیان کل مجموع دو تابع زیان است که در فرمول (3) نشان داده شده است. از آنجایی که L_bce بسیار کوچکتر از L_dice است، وزن ها را تنظیم می کنیم و به ترتیب به 4 و 1 در آزمایش ما برای حفظ وزن متعادل بین شاخه تقسیم بندی و بهینه سازی.
3.4. معیارهای ارزیابی
از آنجایی که مجموعه تست شامل چندین تصویر است، دقت هر تصویر را جداگانه محاسبه می کنیم و در نهایت نتایج ارزیابی تمامی تصاویر را میانگین می گیریم.
4. آزمایش ها و نتایج
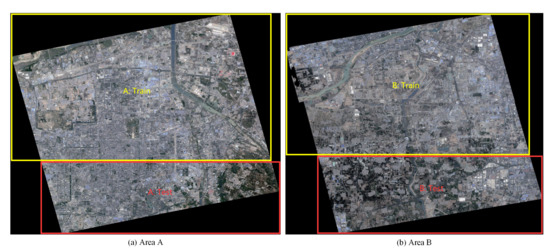
4.1. مجموعه داده ها و استراتژی ها
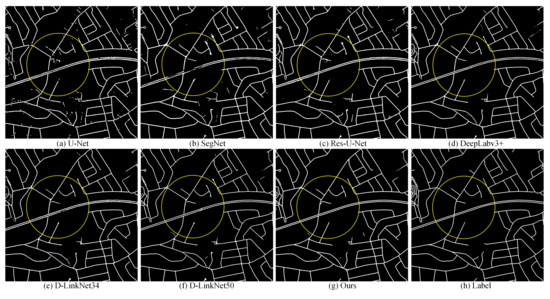
4.2. اجرا در ماساچوست
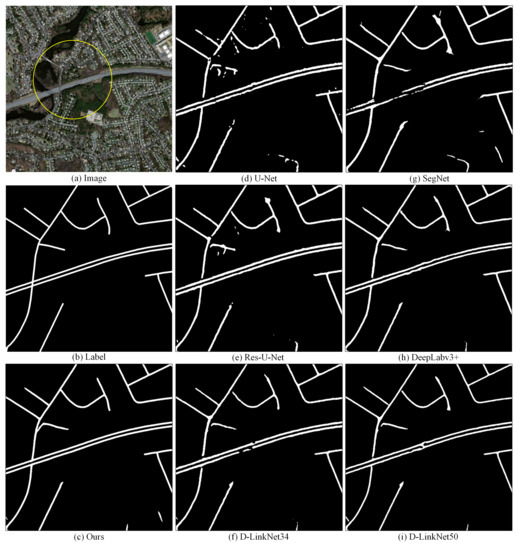
4.3. عملکرد در DeepGlobe
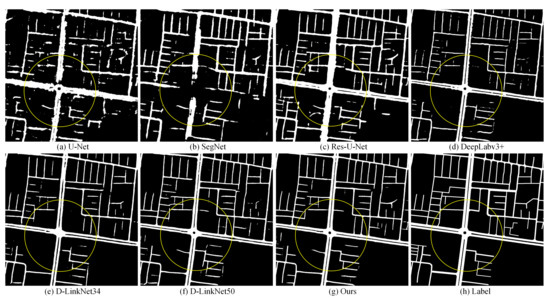
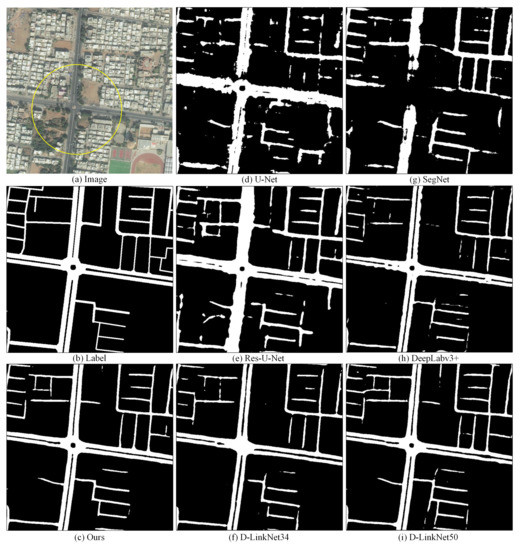
4.4. عملکرد در هواوی Cloud
4.5. مطالعه فرسایش
4.6. مقایسه کارایی
5. بحث و نتیجه گیری
منابع
- وانگ، دبلیو. یانگ، ن. ژانگ، ی. وانگ، اف. کائو، تی. Eklund, P. مروری بر استخراج جاده از تصاویر سنجش از دور. J. Traffic Transp. مهندس (Engl. Ed.) 2016 ، 3 ، 271-282. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- میائو، ز. شی، دبلیو. گامبا، پی. Li, Z. یک روش مبتنی بر شی برای استخراج شبکه جاده در تصاویر ماهواره ای VHR. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2015 , 8 , 4853–4862. [ Google Scholar ] [ CrossRef ]
- عبدالهی، ع. پرادان، بی. شوکلا، ن. چاکرابورتی، اس. Alamri، A. رویکردهای یادگیری عمیق به کار رفته در مجموعه دادههای سنجش از راه دور برای استخراج جاده: بررسی پیشرفتهتر. Remote Sens. 2020 , 12 , 1444. [ Google Scholar ] [ CrossRef ]
- لیان، آر. وانگ، دبلیو. مصطفی، ن. روشهای استخراج جاده در تصاویر سنجش از دور با وضوح بالا: مروری جامع. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2020 , 13 , 5489–5507. [ Google Scholar ] [ CrossRef ]
- چن، ال. زو، س. Xie، X. متعجب.؛ Zeng, H. استخراج جاده از تصاویر سنجش از دور VHR از طریق تقسیم بندی شیء محدود شده توسط ویژگی های گابور. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 362. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- بدرینارایانان، وی. کندال، ا. Cipolla، R. SegNet: معماری رمزگذار-رمزگشای پیچیده پیچیده برای تقسیم بندی تصویر. IEEE Trans. الگوی مقعدی ماخ هوشمند 2017 ، 39 ، 2481-2495. [ Google Scholar ] [ CrossRef ]
- چن، ال سی; زو، ی. پاپاندرو، جی. شروف، اف. آدام، اچ. رمزگذار-رمزگشا با پیچیدگی قابل جداسازی آتروس برای تقسیم بندی تصویر معنایی. در کامپیوتر ویژن-ECCV 2018 ؛ عنوان مجموعه: نکات سخنرانی در کامپیوتر، علوم; فراری، وی.، هبرت، ام.، اسمینچیسسکو، سی.، ویس، ی.، ویرایش. انتشارات بین المللی اسپرینگر: چم، سوئیس، 2018; جلد 11211، ص 833–851. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- او، اچ. یانگ، دی. وانگ، اس. وانگ، اس. Li, Y. استخراج جاده با استفاده از شبکه هرم فضایی Atrous Pooling یکپارچه رمزگذار-رمزگشا و از دست دادن تشابه ساختاری. Remote Sens. 2019 , 11 , 1015. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، اس. مو، ایکس. یانگ، دی. او، اچ. ژائو، پی. استخراج جاده از تصاویر سنجش از دور با استفاده از پیچیدگی داخلی شبکه یکپارچه رمزگذار-رمزگشا و زمینه های تصادفی شرطی جهت دار. Remote Sens. 2021 , 13 , 465. [ Google Scholar ] [ CrossRef ]
- لو، ایکس. ژونگ، ی. ژنگ، ز. لیو، ی. ژائو، جی. ما، ا. یانگ، جی. چارچوب یادگیری عمیق چند مقیاسی و چند وظیفه ای برای استخراج خودکار جاده. IEEE Trans. Geosci. Remote Sens. 2019 , 57 , 9362–9377. [ Google Scholar ] [ CrossRef ]
- دینگ، ال. Bruzzone، L. DiResNet: شبکه باقیمانده آگاه از جهت جهت استخراج جاده در تصاویر سنجش از دور VHR. IEEE Trans. Geosci. Remote Sens. 2021 ، 1-12. [ Google Scholar ] [ CrossRef ]
- وو، کیو. لو، اف. وو، پی. وانگ، بی. یانگ، اچ. Wu, Y. استخراج خودکار جاده از تصاویر سنجش از دور با وضوح بالا با استفاده از روشی مبتنی بر هرم با ویژگیهای فضایی به هم پیوسته متراکم. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2021 , 14 , 3-17. [ Google Scholar ] [ CrossRef ]
- شلهامر، ای. لانگ، جی. دارل، تی. شبکه های کاملاً پیچیده برای تقسیم بندی معنایی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2017 ، 39 ، 640-651. [ Google Scholar ] [ CrossRef ]
- ژانگ، ی. ژو، جی. زو، س. زی، ی. لی، دبلیو. فو، ال. ژانگ، جی. Tan, J. ساخت محیط های فاجعه زمین لغزش مجازی شخصی شده بر اساس نمودارهای دانش و شبکه های عصبی عمیق. بین المللی جی دیجیت. زمین 2020 ، 13 ، 1637-1655. [ Google Scholar ] [ CrossRef ]
- بوسلایف، آ. سفربکوف، اس. ایگلوویکوف، وی. Shvets، A. شبکه کاملاً پیچیده برای استخراج خودکار جاده از تصاویر ماهواره ای. در مجموعه مقالات کنفرانس IEEE/CVF 2018 در کارگاه های آموزشی بینایی و تشخیص الگوی کامپیوتری (CVPRW)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ IEEE: سالت لیک سیتی، UT، ایالات متحده آمریکا، 2018؛ صفحات 197-1973. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وی، ی. وانگ، ز. Xu, M. Road Structure CNN اصلاح شده برای استخراج جاده در تصویر هوایی. IEEE Geosci. سنسور از راه دور Lett. 2017 ، 14 ، 709-713. [ Google Scholar ] [ CrossRef ]
- باستانی، ف. او هست.؛ آببر، س. علیزاده، م. بالاکریشنان، اچ. چاولا، س. مدن، اس. DeWitt, D. RoadTracer: استخراج خودکار شبکه های جاده ای از تصاویر هوایی. در مجموعه مقالات کنفرانس IEEE/CVF 2018 در مورد دید رایانه و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ IEEE: سالت لیک سیتی، UT، ایالات متحده آمریکا، 2018؛ صص 4720–4728. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- الشهی، ر. Marpu، PR; وون، WL; Mura, MD استخراج همزمان جاده ها و ساختمان ها در تصاویر سنجش از دور با شبکه های عصبی کانولوشن. ISPRS J. Photogramm. Remote Sens. 2017 ، 130 ، 139-149. [ Google Scholar ] [ CrossRef ]
- گرینیاس، آی. پاناگیوتاکیس، سی. Tziritas، G. تقسیمبندی مبتنی بر MRF و طبقهبندی بدون نظارت برای تشخیص ساختمان و جاده در مناطق پیرامون شهری از تصاویر ماهوارهای با وضوح بالا. ISPRS J. Photogramm. Remote Sens. 2016 ، 122 ، 145-166. [ Google Scholar ] [ CrossRef ]
- شی، دبلیو. میائو، ز. Debayle, J. یک روش یکپارچه برای استخراج خط مرکزی جاده اصلی شهری از تصاویر سنجش از دور نوری. IEEE Trans. Geosci. Remote Sens. 2014 , 52 , 3359–3372. [ Google Scholar ] [ CrossRef ]
- زو، س. چن، ال. متعجب.؛ پیراسته، س. لی، اچ. Xie, X. آموزش ویژگی بدون نظارت برای بهبود قابلیت انتقال بازنمایی های حساسیت زمین لغزش. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2020 , 13 , 3917–3930. [ Google Scholar ] [ CrossRef ]
- زو، س. لیائو، سی. متعجب.؛ می، ایکس. Li, H. MAP-Net: شبکه عصبی مسیر حضور چندگانه برای استخراج ردپای ساختمان از تصاویر سنجش از دور. IEEE Trans. Geosci. Remote Sens. 2021 , 59 , 6169–6181. [ Google Scholar ] [ CrossRef ]
- لیائو، سی. متعجب.؛ لی، اچ. Ge، X. چن، ام. لی، سی. زو، کیو. یادگیری مشترک کانتور و ساختار برای استخراج ساختمان های حفظ شده با مرز. Remote Sens. 2021 , 13 , 1049. [ Google Scholar ] [ CrossRef ]
- زی، ی. میائو، اف. ژو، ک. Peng, J. HsgNet: یک شبکه استخراج جاده بر اساس درک جهانی از اطلاعات مکانی با مرتبه بالا. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 571. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دینگ، سی. ونگ، ال. شیا، م. Lin, H. شبکه جستجوی ویژگی غیرمحلی برای بخش بندی ساختمان و جاده تصویر سنجش از دور. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 245. [ Google Scholar ] [ CrossRef ]
- ژائو، ایکس. تائو، آر. لی، دبلیو. فیلیپس، دبلیو. Liao، W. Fractional Gabor Convolutional Network for Multisource Remote Sensing Data Classification. IEEE Trans. Geosci. Remote Sens. 2021 , 60 . [ Google Scholar ] [ CrossRef ]
- رونبرگر، او. فیشر، پی. Brox، T. U-Net: شبکه های کانولوشن برای تقسیم بندی تصویر زیست پزشکی. در محاسبات تصویر پزشکی و مداخله به کمک کامپیوتر – MICCAI 2015 ; عنوان مجموعه: نکات سخنرانی در کامپیوتر، علوم; نواب، ن.، هورنگر، ج.، ولز، دبلیو ام، فرانگی، اف.اف.، ویرایش. انتشارات بین المللی Springer: چم، سوئیس، 2015; جلد 9351، ص 234–241. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ز. لیو، کیو. وانگ، Y. استخراج جاده توسط Deep Residual U-Net. IEEE Geosci. از راه دور. سنس لت. 2018 ، 15 ، 749-753. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شین، جی. ژانگ، ایکس. ژانگ، ز. Fang, W. استخراج از راه دور تصاویر سنجش از دور با وضوح بالا برگرفته از DenseUNet. Remote Sens. 2019 , 11 , 2499. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، ز. وانگ، سی. لی، جی. زی، ن. هان، ی. Du, J. Reconstruction Bias U-Net برای استخراج جاده از تصاویر سنجش از دور نوری. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2021 , 14 , 2284–2294. [ Google Scholar ] [ CrossRef ]
- رن، ی. یو، ی. Guan, H. DA-CapsUNet: یک کپسول U-Net با توجه دوگانه برای استخراج جاده از تصاویر سنجش از دور. Remote Sens. 2020 , 12 , 2866. [ Google Scholar ] [ CrossRef ]
- او، ک. ژانگ، ایکس. رن، اس. Sun، J. یادگیری باقیمانده عمیق برای تشخیص تصویر. در مجموعه مقالات کنفرانس IEEE 2016 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لاس وگاس، NV، ایالات متحده آمریکا، 27 تا 30 ژوئن 2016؛ IEEE: لاس وگاس، NV، ایالات متحده آمریکا، 2016؛ صص 770-778. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دیاکوگیانیس، فی. والدنر، اف. کاکتا، پی. Wu, C. ResUNet-a: یک چارچوب یادگیری عمیق برای تقسیم بندی معنایی داده های سنجش از راه دور. ISPRS J. Photogramm. Remote Sens. 2020 , 162 , 94–114. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هوانگ، جی. لیو، ز. ون در ماتن، ال. واینبرگر، شبکههای کانولوشن با اتصال متراکم KQ. در مجموعه مقالات کنفرانس IEEE 2017 در مورد دید رایانه و تشخیص الگو (CVPR)، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ IEEE: هونولولو، HI، ایالات متحده آمریکا، 2017؛ ص 2261-2269. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دای، جی. زو، تی. وانگ، ی. ما، ر. Fang, X. استخراج جاده از تصاویر ماهواره ای با وضوح بالا بر اساس توصیفگرهای متعدد. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2020 , 13 , 227–240. [ Google Scholar ] [ CrossRef ]
- وانگ، اس. یانگ، اچ. وو، کیو. ژنگ، ز. وو، ی. لی، جی. یک روش بهبود یافته برای استخراج جاده از تصاویر سنجش از دور با وضوح بالا که اطلاعات مرزی را افزایش می دهد. Sensors 2020 , 20 , 2064. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Wegner، JD; Montoya-Zegarra، JA; شیندلر، کی. یک مدل CRF با مرتبه بالاتر برای استخراج شبکه جاده ای. در مجموعه مقالات کنفرانس IEEE 2013 در مورد بینایی کامپیوتری و تشخیص الگو، پورتلند، OR، ایالات متحده آمریکا، 23 تا 28 ژوئن 2013. IEEE: Portland, OR, USA, 2013; صفحات 1698-1705. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، ال سی; پاپاندرو، جی. کوکینوس، آی. مورفی، ک. Yuille، AL DeepLab: Semantic Segmentation image with Deep Convolutional Nets، Atrous Convolution، و CRFهای کاملاً متصل. IEEE Trans. الگوی مقعدی ماخ هوشمند 2018 ، 40 ، 834-848. [ Google Scholar ] [ CrossRef ]
- چن، ز. فن، دبلیو. ژونگ، بی. لی، جی. دو، ج. وانگ، سی. استخراج جاده از کورس به ریز بر اساس مدلهای مخلوط دیریکله محلی و یادگیری عمیق چند مقیاسی. IEEE Trans. هوشمند ترانسپ سیستم 2019 ، 21 ، 4283-4293. [ Google Scholar ] [ CrossRef ]
- ژانگ، ی. Xiong، Z. زنگ، ی. وانگ، سی. لی، جی. Li, X. استخراج شبکه جاده ای آگاه از توپولوژی از طریق شبکه های متخاصم مولد با نظارت. Remote Sens. 2019 , 11 , 1017. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، ام. سویی، اچ. چن، اس. وانگ، جی. Chen, X. BT-RoadNet: یک شبکه عصبی مرزی و آگاه از توپولوژی برای استخراج جاده از تصاویر سنجش از دور با وضوح بالا. ISPRS J. Photogramm. Remote Sens. 2020 , 168 , 288–306. [ Google Scholar ] [ CrossRef ]
- Sghaier، MO; Lepage، R. استخراج جاده از تصاویر نوری سنجش از دور با وضوح بسیار بالا بر اساس تجزیه و تحلیل بافت و تبدیل پرتو. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2016 ، 9 ، 1946-1958. [ Google Scholar ] [ CrossRef ]
- الشهی، ر. Marpu، بخشبندی مبتنی بر نمودار سلسله مراتبی روابط عمومی برای استخراج شبکههای جادهای از تصاویر ماهوارهای با وضوح بالا. ISPRS J. Photogramm. Remote Sens. 2017 , 126 , 245–260. [ Google Scholar ] [ CrossRef ]
- باترا، ا. سینگ، اس. پانگ، جی. باسو، س. جواهر، ج. Paluri، M. بهبود اتصال جاده با یادگیری مشترک جهت گیری و تقسیم بندی. در مجموعه مقالات کنفرانس IEEE/CVF 2019 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 15 تا 20 ژوئن 2019؛ IEEE: لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 2019؛ ص 10377–10385. [ Google Scholar ] [ CrossRef ]
- قهوهای مایل به زرد، YQ; گائو، SH; Li، XY; چنگ، MM; Ren, B. VecRoad: کاوش نمودار تکراری مبتنی بر نقطه برای استخراج نمودارهای جاده. در مجموعه مقالات کنفرانس IEEE/CVF 2020 در مورد دید رایانه و تشخیص الگو (CVPR)، سیاتل، WA، ایالات متحده آمریکا، 13 تا 19 ژوئن 2020؛ IEEE: سیاتل، WA، ایالات متحده آمریکا، 2020؛ صص 8907–8915. [ Google Scholar ] [ CrossRef ]
- فو، جی. لیو، جی. تیان، اچ. لی، ی. بائو، ی. نیش، ز. لو، اچ. شبکه توجه دوگانه برای تقسیم بندی صحنه. در مجموعه مقالات کنفرانس IEEE/CVF 2019 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 15 تا 20 ژوئن 2019؛ IEEE: لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 2019؛ صص 3141-3149. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، ایکس. گیرشیک، آر. گوپتا، ا. او، K. شبکه های عصبی غیر محلی. در مجموعه مقالات کنفرانس IEEE/CVF 2018 در مورد دید رایانه و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018؛ IEEE: سالت لیک سیتی، UT، ایالات متحده آمریکا، 2018؛ صفحات 7794-7803. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هو، جی. شن، ال. آلبانی، اس. سان، جی. وو، ای. شبکه های فشار و برانگیختگی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2020 ، 42 ، 2011–2023. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وان، جی. زی، ز. خو، ی. چن، اس. Qiu, Q. DA-RoadNet: شبکه ای با توجه دوگانه برای استخراج جاده از تصاویر ماهواره ای با وضوح بالا. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2021 , 14 , 6302–6315. [ Google Scholar ] [ CrossRef ]
- لی، جی. لیو، ی. ژانگ، ی. Zhang، Y. آبشاری توجه DenseUNet (CADUNet) برای استخراج جاده از تصاویر با وضوح بسیار بالا. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 329. [ Google Scholar ] [ CrossRef ]
- لوک، پی. کوپری، سی. چینتالا، اس. Verbeek, J. Semantic Segmentation with Adversarial Networks. arXiv 2016 , arXiv:1611.08408. [ Google Scholar ]
- کوستئا، دی. مارکو، ا. لئوردئانو، ام. Slusanschi، E. ایجاد نقشههای راه در تصاویر هوایی با شبکههای دشمن مولد و بهینهسازی مبتنی بر هموارسازی. در مجموعه مقالات کنفرانس بین المللی IEEE 2017 در کارگاه های بینایی کامپیوتری (ICCVW)، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ IEEE: ونیز، ایتالیا، 2017؛ ص 2100–2109. [ Google Scholar ] [ CrossRef ]
- ژانگ، ایکس. هان، ایکس. لی، سی. تانگ، ایکس. ژو، اچ. جیائو، ال. استخراج تصویر هوایی از جاده بر اساس شبکه دشمنان مولد بهبود یافته. Remote Sens. 2019 , 11 , 930. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، ال. ژانگ، سی. Wu, M. D-LinkNet: لینک نت با رمزگذار از پیش آموزش دیده و پیچش گشاد شده برای استخراج جاده تصاویر ماهواره ای با وضوح بالا. در مجموعه مقالات کنفرانس IEEE/CVF 2018 در کارگاه های آموزشی بینایی و تشخیص الگوی کامپیوتری (CVPRW)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ IEEE: سالت لیک سیتی، UT، ایالات متحده آمریکا، 2018؛ صفحات 192-1924. [ Google Scholar ] [ CrossRef ]
- دمیر، من. کوپرسکی، ک. لیندنباوم، دی. پانگ، جی. هوانگ، جی. باسو، س. هیوز، اف. تویا، دی. Raskar, R. DeepGlobe 2018: چالشی برای تجزیه زمین از طریق تصاویر ماهواره ای. در مجموعه مقالات کنفرانس IEEE/CVF 2018 در کارگاه های آموزشی بینایی و تشخیص الگوی کامپیوتری (CVPRW)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ IEEE: سالت لیک سیتی، UT، ایالات متحده آمریکا، 2018؛ صفحات 172-17209. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بهداناو، د. چو، خ. Bengio، Y. ترجمه ماشینی عصبی با یادگیری مشترک تراز و ترجمه. در مجموعه مقالات سومین کنفرانس بینالمللی بازنماییهای یادگیری (ICLR)، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 7 تا 9 مه 2015. [ Google Scholar ]
- میلتاری، ف. نواب، ن. احمدی، SA V-Net: شبکه های عصبی کاملاً کانولوشن برای تقسیم بندی تصویر حجمی پزشکی. در مجموعه مقالات چهارمین کنفرانس بین المللی 2016 در 3D Vision (3DV)، استانفورد، کالیفرنیا، ایالات متحده آمریکا، 25-28 اکتبر 2016. IEEE: استانفورد، کالیفرنیا، ایالات متحده آمریکا، 2016؛ صص 565-571. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Mnih، V. یادگیری ماشین برای برچسب گذاری تصویر هوایی. Ph.D. پایان نامه، دانشگاه تورنتو، اتاوا، ON، کانادا، 2013. [ Google Scholar ]
- Huawei Cloud Road Extraction Challenge 2020. در دسترس آنلاین: https://competition.huaweicloud.com/information/1000041322/introduction (در 26 دسامبر 2021 قابل دسترسی است).
- گنگ، ک. سان، ایکس. یان، ز. دیائو، دبلیو. Gao, X. تقطیر دانش فضایی توپولوژیکی برای استخراج جاده فشرده در تصاویر سنجش از دور نوری. Remote Sens. 2020 , 12 , 3175. [ Google Scholar ] [ CrossRef ]
- ژانگ، ز. Wang, Y. JointNet: یک شبکه عصبی مشترک برای استخراج جاده و ساختمان. Remote Sens. 2019 , 11 , 696. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]


بدون دیدگاه