

خلاصه
این مطالعه بر استخراج شبکه ناوبری داخلی برای برنامه های ناوبری بر اساس داده های ساختمان سه بعدی موجود و با استفاده از کتابخانه SFCGAL، به عنوان مثال کتابخانه الگوریتم های هندسه محاسباتی ویژگی های ساده متمرکز شده است. در این مطالعه، توجه ویژه ای به مجموعه داده های کاداستر سه بعدی و BIM (مدل سازی اطلاعات ساختمان) شده است که به عنوان منابع داده برای مدل سازی هندسی سه بعدی داخلی استفاده شده است. توابع سه بعدی SFCGAL برای استخراج یک شبکه داخلی استفاده می شود که در قالب نمودارهای اتصال داخلی بر اساس هندسه های سه بعدی ویژگی های داخلی مدل شده است. استخراج با ادغام نرم افزار بارگذاری تبدیل استخراج (ETL) و پایگاه داده فضایی برای پشتیبانی از چندین منبع داده و دسترسی به توابع SFCGAL انجام می شود. با این رویکرد یکپارچه، فقدان فعلی پشتیبانی نرم افزاری ساده برای تحلیل های فضایی سه بعدی پیچیده بررسی شده است. بر اساس روش توسعهیافته، ما استخراج یک شبکه ناوبری داخلی از دادههای کاداستر سه بعدی و BIM را انجام داده و مورد بحث قرار میدهیم. کارایی و عملکرد تحلیل های شبکه با استفاده از زمان های پردازش و اجرای پرس و جو ارزیابی شد. نتایج نشان میدهد که روش پیشنهادی برای استخراج شبکه ناوبری مبتنی بر هندسه ساختمانها کارآمد است و میتواند با انواع دادههای هندسی سهبعدی داخلی استفاده شود. کارایی و عملکرد تحلیل های شبکه با استفاده از زمان های پردازش و اجرای پرس و جو ارزیابی شد. نتایج نشان میدهد که روش پیشنهادی برای استخراج شبکه ناوبری مبتنی بر هندسه ساختمانها کارآمد است و میتواند با انواع دادههای هندسی سهبعدی داخلی استفاده شود. کارایی و عملکرد تحلیل های شبکه با استفاده از زمان های پردازش و اجرای پرس و جو ارزیابی شد. نتایج نشان میدهد که روش پیشنهادی برای استخراج شبکه ناوبری مبتنی بر هندسه ساختمانها کارآمد است و میتواند با انواع دادههای هندسی سهبعدی داخلی استفاده شود.
کلید واژه ها:
SFCGAL ; DBMS _ ETL ; ناوبری داخلی ؛ توپولوژی ; پرس و جو فضایی ; کاداستر سه بعدی ; BIM
1. معرفی
دامنه دادههای مکانی سهبعدی با اطلاعات و کاربردهای سهبعدی زمینفضایی مشتقشده، توسعه سریعی را در همه جنبههای خود تجربه میکند، از جمله جمعآوری دادههای مکانی سهبعدی، مدلسازی و پردازش دادههای مکانی، تحلیل و تجسم فضایی [ 1 ، 2 ، 3 ، 4 ].]. دادههای سهبعدی زمینفضایی و کاربردهای اطلاعات جغرافیایی سهبعدی در دهه گذشته بهعنوان یک صنعت زمینفضایی بهسرعت در حال توسعه با سنسورها و پلتفرمهای جدید و همچنین پیشرفت سریع فناوری اطلاعات و ارتباطات، فرصتهایی را برای دستیابی، جمعآوری، مدلسازی و تجزیه و تحلیل بزرگ باز کرده است. مجموعه داده های جغرافیایی با این حال، مدیریت و تجزیه و تحلیل داده های فضایی سه بعدی همراه با تمام جنبه های داده های فضایی داخلی تا همین اواخر عقب مانده بود [ 5 ]. پرس و جوها و تجزیه و تحلیل داده های مکانی برای تصمیم گیری و برنامه های کاربردی داخلی به مدل های داده پیشرفته با هندسه و توپولوژی با کیفیت بالا نیاز دارند. در حالی که بسیاری از نشریات با رویکردهای هندسی و توپولوژیکی مدلسازی سه بعدی زمینفضایی سروکار دارند [ 6 ، 7 ، 8]، یکپارچه سازی و مدیریت داده های زمین فضایی سه بعدی در هر دو سطح هندسی و معنایی یک چالش بزرگ باقی مانده است و تمرکز چندین فعالیت تحقیقاتی است [ 9 ، 10 ، 11 ]. اهمیت یکپارچه سازی و مدیریت داده های فضایی سه بعدی در این واقعیت است که بسیاری از تحلیل های فضایی که اطلاعات ارزشمندی را تولید می کنند از داده های منابع مختلف استفاده می کنند که نیاز به هماهنگ و یکپارچه سازی دارند. پشتیبانی نرم افزار فعلی برای تجزیه و تحلیل داده های فضایی سه بعدی ناکافی است، زیرا اکثر الگوریتم ها تنها از پردازش و تجزیه و تحلیل داده های فضایی دو بعدی پشتیبانی می کنند. تقاضا و اهمیت اطلاعات فضایی داخلی به سرعت در حال رشد است و نیاز به یکپارچه سازی داده ها از حوزه های مختلف را ایجاد می کند [ 2 ، 12 ، 13 ]]. استخراج و مدل سازی داده ها و اطلاعات مربوط به ناوبری داخلی از منابع داده های مختلف به شدت در سال های اخیر مورد مطالعه قرار گرفته است [ 14 ، 15 ، 16 ، 17 ، 18 ]. هدف اصلی این مطالعه توسعه روشی برای انجام استخراج یک شبکه ناوبری داخلی بر اساس هندسه سه بعدی با استفاده از توابع SFCGAL و بحث در مورد مسائل و مزایای استفاده از این رویکرد است. این روش برای دو منبع داده فضایی داخلی مختلف، یعنی دادههای کاداستر سهبعدی و دادههای BIM، که منابع داده هندسی سهبعدی و ویژگیهای شناخته شده برای فضای داخلی ساختمان هستند، اعمال میشود.
در بخش اول مقاله، ادغام نرم افزار بار تبدیل عصاره فضایی (ETL) [ 19 ] و پایگاه داده فضایی مورد استفاده برای توسعه روش استخراج شبکه ناوبری داخلی مبتنی بر هندسه ارائه شده است. با استفاده از FME Desktop (FME) و PostgreSQL با پسوندهای PostGIS و SFCGAL [ 20 ] پیاده سازی شده است. با فرض اینکه نرمافزار ETL از هندسه سهبعدی پشتیبانی میکند، میتوان آن را به طور موثر برای تجزیه، ادغام و استخراج دادههای مکانی سه بعدی، که بخش مهمی از مدلسازی و تحلیلهای فضایی سه بعدی پیچیده است، استفاده کرد. FME پشتیبانی قوی برای دستکاری داده های سه بعدی جغرافیایی دارد و اخیراً فرمت های استاندارد فایل داده مانند CityGML [ 21 ]، IndoorGML [21] را پذیرفته است. 22 ] را پذیرفته است.] و IFC (کلاس های بنیاد صنعت) [ 23]، همراه با سایر فرمت های فایل داده های سه بعدی (OBJ، COLLADA، STL، FBX، 3DS، و X3D). با این حال، FME دارای برخی عملکردها، هرچند بسیار محدود، برای پردازش هندسه های سه بعدی است. برای این کار، پایگاه داده PostgreSQL انتخاب شد زیرا دسترسی به توابع سه بعدی SFCGAL را فراهم می کند که پردازش هندسه های سه بعدی را امکان پذیر می کند. SFCGAL یک کتابخانه پوششی C++ است که از ISO 19107:2013 و OGC (کنسرسیوم فضایی باز) ویژگی های ساده دسترسی 1.2 برای عملیات سه بعدی پشتیبانی می کند. این کتابخانه حول محور CGAL (کتابخانه الگوریتمهای هندسه محاسباتی) ساخته شده است که الگوریتمهایی را برای محاسبات هندسی ارائه میکند. علاوه بر انواع ویژگیهای فضایی رایج، پایگاه داده PostGIS و SFCGAL فعال از ذخیرهسازی TIN (شبکههای نامنظم مثلثی)، سطوح چندوجهی و جامدات پشتیبانی میکند و عملکردهایی را برای انجام عملیات فضایی سه بعدی با استفاده از هندسههای سه بعدی ذخیره شده ارائه میدهد. از آنجایی که نرم افزار ETL برای کار با پایگاه های داده طراحی شده است، معمولاً فرآیندهای ETL شامل پایگاه های داده می شوند. رویکرد ما متفاوت است، زیرا از پایگاه داده برای دسترسی به عملکردهای سه بعدی مورد نیاز برای استخراج یک شبکه ناوبری داخلی بر اساس هندسه های سه بعدی استفاده می کند.
هدف مطالعه موردی کاداستر سه بعدی تقویت ایده کاداستر سه بعدی چند منظوره است. این بر اساس مدل داده های کاداستر سه بعدی است که در [ 24 ] مورد بحث قرار گرفت، با این تفاوت که هندسه های جامد فقط در معابر (مثلاً درها) لمس می شوند. دادههای مکانی سهبعدی باید در یک کاداستر سهبعدی برای مدلسازی کارآمد تقسیمبندیهای پیچیده واحدهای دارایی واقعی در یک محیط سهبعدی که حقوق، محدودیتها و مسئولیتها به آن مرتبط است، استفاده شود [ 25 ]. کاربردهای ناوبری داخلی عموماً فراتر از محدوده مدیریت سنتی زمین، به عنوان مثال، کاداستر بوده است. با این حال، پیشرفتها در اکتساب، مدیریت و تجسم دادههای فضایی سهبعدی، بهویژه در دهه گذشته، این دو زمینه را بسیار نزدیکتر کرده است [ 26 ].]. استفاده از دادههای کاداستر دارای مزایایی نسبت به سایر منابع داده است زیرا دادهها رسمی هستند، از یک مدل داده از پیش تعریفشده پیروی میکنند و کیفیت آن کنترل میشود (یا باید کنترل شود). بزرگترین نقطه ضعف فعلی این است که سیستم های کاداستر سه بعدی دیجیتال هنوز به صورت عملیاتی در مقیاس بزرگتر معرفی نشده اند.
داده های BIM مطابق با استانداردهای IFC (ISO 16739-1:2018) یک منبع داده غنی برای بسیاری از برنامه های مرتبط با ساختمان، از جمله ناوبری داخلی است. دیاکیته و زلاتانوا [ 12 ] و لین و همکاران. [ 27 ] قبلاً داده های IFC را به عنوان منبع داده برای برنامه های ناوبری داخلی در نظر گرفته اند. خو و همکاران [ 28 ] و لین و همکاران. [ 17 ] کاهش مسئله به فضای دو بعدی و شطرنجی سازی هندسه برداری را پیشنهاد می کند. شیونگ و همکاران [ 14 ] از voxelization برای اجتناب از وظایف پردازش برداری پیچیده استفاده کرد. یک مدل voxel نیز توسط Staats و همکاران استفاده شد. [ 29 ]. تئو و چو [ 30 ] و خان و همکاران. [ 31 ] از اطلاعات معنایی استفاده کنید (IfcRelSpaceBoundary ) در فایل های IFC برای استخراج شبکه ناوبری. در مقابل، مطالعه ما بر استخراج یک شبکه ناوبری مبتنی بر هندسه سه بعدی نهادهای IfcSpace ، IfcDoor و IfcStair متمرکز است. رویکرد ما قابل مقایسه با رویکردهایی است که استخراج مبتنی بر معنایی یک شبکه ناوبری از یک فایل IFC را پیشنهاد میکنند [ 30 ، 31 ].
2. روش شناسی
این مطالعه بر پردازش داده های هندسی سه بعدی برای استخراج یک شبکه ناوبری داخلی متمرکز است. هندسه های سه بعدی که در این زمینه استفاده می شوند، فضاهای داخلی سه بعدی قابل کشتیرانی هستند. برای انجام عملیات سه بعدی و استخراج شبکه ناوبری از داده های ورودی، نرم افزار ETL فضایی FME و پایگاه داده PostgreSQL را با پسوندهای PostGIS و SFCGAL یکپارچه می کنیم ( شکل 1 ).
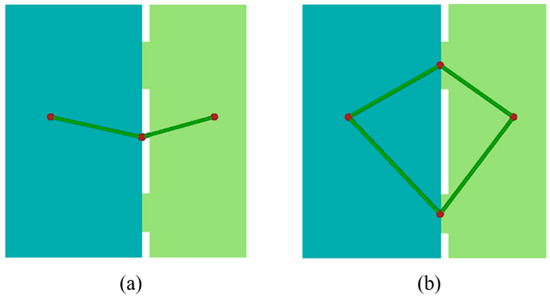
قبل از اینکه داده ها به پایگاه داده منتقل شوند، باید از قبل پردازش شوند. هدف استخراج هندسه ها و ویژگی های سه بعدی از داده های ورودی و تبدیل آنها به شکلی است که می تواند به پایگاه داده PostGIS وارد شده و با توابع SFCGAL تجزیه و تحلیل شود. در مرحله اول، تمام موجودیت های مربوطه که هندسه های سه بعدی ویژگی های داخلی را نشان می دهند باید از داده های ورودی استخراج شوند. برخی از مجموعه داده های ورودی (مثلاً فایل های IFC) باید ابتدا به موجودیت های جداگانه تجزیه شوند. تجزیه و استخراج داده های مربوطه را می توان در طول وارد کردن مجموعه داده به FME انجام داد. پس از آن، فیلترهای مختلف ویژگی یا هندسه نیز می توانند برای انتخاب داده های مربوطه برای پردازش سه بعدی با توابع SFCGAL اعمال شوند. در این مرحله، بسته به منبع داده، هندسه ها را می توان با استفاده از ابزارهای FME اعتبار سنجی کرد و تا حدی، برای خطاها تصحیح شد ذخیره سازی داده ها معمولاً فرآیند ETL را خاتمه می دهد. در این مورد، نوشتن داده ها در پایگاه داده PostGIS در طول فرآیند انجام می شود و اجازه می دهد تا پس از بارگیری داده ها ادامه یابد. بیشترین توجه در این مرحله باید به هندسه داده شود، زیرا فقط انواع هندسه پشتیبانی شده توسط PostGIS را می توان در پایگاه داده درج کرد. در این مقاله، تمرکز بر روی هندسه های جامد سه بعدی است که توسط سطوح چند وجهی محدود شده اند. سطوح مرزی هندسه ها را می توان در FME با جداسازی هندسه های ورودی به دست آورد. هنگامی که هندسه های ورودی از هم جدا می شوند (به قطعات تقسیم می شوند)، حفظ ویژگی های منحصر به فرد آنها مهم است. این ویژگی ها برای گروه بندی سطوحی که هر هندسه جامد را در هنگام ایجاد هندسه های جامد محدود می کنند، استفاده می شود.شکل 2نمونه ای از یک جامد سه بعدی معتبر در FME را نشان می دهد (هیچ خطای اعتبار سنجی جامد گزارش نشده است) (الف) قبل و (ب) پس از درج در پایگاه داده PostGIS. در این مورد، سطوح مرزی در PostGIS مانند FME نیستند. این در مورد سطوحی که دارای سوراخ های داخلی هستند اتفاق می افتد. چنین هندسه هایی توسط PostGIS به عنوان نامعتبر گزارش شده است. PostGIS همچنین خطای اعتبار را گزارش می کند، زمانی که نقاط یک سطح روی یک صفحه قرار نگیرند. چنین هندسه هایی اجازه استفاده از توابع سه بعدی SFCGAL را در پایگاه داده PostGIS نمی دهند. راه حل عمومی برای این موضوع انجام مثلث بندی تمام سطوح در FME قبل از ایجاد هندسه های جامد است. این مرحله اضافی تمام سطوح محدود جامدات را مثلث می کند. با مثلثها، از مسائل اعتبار اجتناب میکنیم، زیرا سوراخهای داخلی ندارند و همچنین نمیتوانند نقاطی در یک صفحه نداشته باشند.
لازم به ذکر است که مثلث سازی ساختار سطوح مرزی را تغییر می دهد، اما این موضوع برای برنامه ارائه شده برای استخراج شبکه ناوبری مبتنی بر هندسه مطرح نیست. هندسه ها باید همراه با شناسه ها به پایگاه داده وارد شوند تا امکان ارجاع به نتایج عملیات سه بعدی در FME برای پردازش و نوشتن نتایج بعدی فراهم شود.
هنگامی که هندسه ها ( geom )، شناسه ها ( sn ) و ویژگی های اضافی اختیاری به پایگاه داده وارد می شوند ( فضاهای جدول موقت )، پرس و جوهای SQL با استفاده از توابع SFCGAL 3D می توانند برای استخراج روابط توپولوژیکی هندسه های درج شده اجرا شوند. به طور کلی، فضاهای قابل کشتیرانی که در یک رابطه لمسی هستند امکان انتقال از یکی به دیگری را فراهم می کند. برخی از مدلهای داده نیز امکان همپوشانی فضاهای قابل کشتیرانی را فراهم میکنند که امکان انتقال را فراهم میکند. در اینجا، ما فرض می کنیم که فضاهای قابل کشتیرانی که از نظر مکانی ناهمگون هستند، اجازه انتقال از یکی به دیگری را نمی دهند. بسته به پیچیدگی مورد نیاز شبکه می توان از روش های مختلفی استفاده کرد.
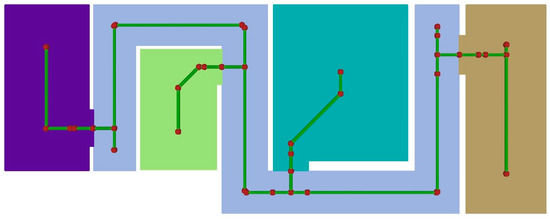
اولین و اساسیترین روش از ابزار قرار دادن مرکز FME و تابع بولی SFCGAL ST_3DI برای شناسایی جفتهایی از هندسههایی که متقاطع میشوند استفاده میکند. این تابع برای هندسه های همپوشانی و لمس کردن، TRUE را برمی گرداند. با استفاده از پرس و جو ( پیوست A.1 )، دو جفت شناسه متقارن (به عنوان شروع و پایان ) را برای هر اتصال از فضاهای یافت شده انتخاب می کنیم. اگر فقط یکی از دو جفت را بخواهیم، a.sn! = شرط b.sn باید به a.sn > b.sn تغییر کند. پرس و جو منجر به شناسه های فضاهای متصل می شود. به موازات اجرای پرس و جو در پایگاه داده، هندسه های جامد سه بعدی با استفاده از ابزار قرار دادن مرکز FME به گره های گراف تبدیل می شوند. این الگوریتم گزینه ای برای اجبار قرار دادن مرکز در داخل چند ضلعی دارد، بنابراین مشکل مرکز خارجی برای چند ضلعی های پیچیده (چند ضلعی های مقعر و دونات) را حل می کند. از آنجایی که فقط چند ضلعی های دو بعدی پشتیبانی می شوند، هر هندسه جامد سه بعدی به یک چندضلعی دو بعدی تبدیل می شود که نمایانگر طرح کلی هر جامد در صفحه افقی است. هر گره به صورت عمودی در وسط بین مرزهای عمودی جامد مربوطه قرار می گیرد. شبکه ناوبری نهایی با پیوستن گره ها به نتیجه پرس و جو SQL و ایجاد خطوط بین گره های متصل محقق می شود. اولین رویکرد منجر به یک شبکه ناوبری اساسی می شود،32 ]، با اتصالاتی که نشان دهنده مسیر بین گره ها نیستند ( شکل 3 ). در نتیجه، چنین شبکه ای را می توان برای برنامه های ناوبری اساسی بدون گزینه ای برای تجسم مسیر استفاده کرد. بوگوسلاوسکی و همکاران [ 33 ] و لیو و زلاتانوا [ 34 ] از این نوع شبکه به عنوان مبنایی برای استخراج شبکههای قابل کشتیرانی پیچیدهتر استفاده میکنند.
روش دوم غنی سازی NRS اصلی به ساختار ارتباط گره و ورودی (NRSE) [ 32 ] را فراهم می کند. برای انجام این کار با استفاده از SFCGAL، تابع ST_3Dintersection معرفی میشود که هندسه تقاطع را خروجی میدهد ( پیوست A.2 ). با استفاده از هندسه های تقاطع و ابزار قرار دادن مرکز FME، گره های اضافی را که در اتصالات فضایی قرار می گیرند، می توان استخراج کرد و به شبکه ناوبری اضافه کرد ( شکل 4 ).
این روش برای فضاهایی کار می کند که تنها یک اتصال به هر فضای متصل دارند ( شکل 4 ). شکل 5 الف نمونه ای از دو فضایی را نشان می دهد که با گذرگاه های متعدد به هم متصل شده اند. بنابراین، روش استخراج NRSE باید برای سازگاری با چنین مواردی اصلاح شود. در این موارد، تابع ST_3Dintersection چندین هندسه تقاطع را به عنوان یک ویژگی برمیگرداند. ابزار جمعآوری FME برای تقسیم هندسههای تقاطع ناهمگون و در نتیجه قرار دادن یک گره در هر اتصال استفاده شد ( شکل 5 ب).
همانطور که در شکل 3 و شکل 4 نشان داده شده است ، پیچیدگی فضاهای داخلی نیازمند رویکردهای پیشرفته تری است که تعداد گره ها را افزایش داده و محل قرارگیری آنها را بهینه می کند. بسیاری از مطالعات روش های مختلفی را برای استخراج شبکه ناوبری برای برنامه ریزی مسیر بهینه پیشنهاد کردند. اکثر آنها از روش هایی استفاده می کنند که شامل تبدیل محور میانی [ 30 ، 32 ، 35 ]، بخش بندی ساختار با استفاده از شبکه های نامنظم مثلثی (TINs) [ 18 ، 33 ] است. تابع SFCGAL ST_ApproximateMedialAxisدر روش پیشنهادی سوم که شبکه ناوبری را در داخل هر فضا متراکم می کند، استفاده می شود. از آنجایی که این تابع فقط روی هندسههای دو بعدی کار میکند، هندسههای جامد به خطوط دو بعدی خود در FME تبدیل میشوند و بهعنوان چندضلعی ( geom ) همراه با شناسههای فضاها ( sn ) در پایگاه داده PostGIS (فضاهای جدول موقت 2d) قرار میگیرند . در آنجا، محور میانی تقریبی برای هر چند ضلعی محاسبه می شود و لبه های شبکه به دست می آید ( پیوست A.3 ). تابع ST_Dump برای استخراج گره های لبه های محاسبه شده استفاده می شود ( پیوست A.4). در این مرحله شبکه های محاسبه شده متصل نیستند. گره های اتصال فضاها بر اساس روش دوم مشتق شده و با شناسه منحصر به فرد ( id ) هندسه ( geom ) و شناسه های هر دو فضای متصل ( شروع، پایان ) در پایگاه داده PostGIS ( اتصالات جدول موقت) وارد می شوند. پس از پیوستن لبه های محاسبه شده (نتیجه پرس و جو پیوست A.3 ) به جدول اتصالات ، نزدیکترین نقطه لبه را می توان با استفاده از تابع ST_ClosestPoint که در توابع استاندارد PostGIS گنجانده شده است ( پیوست A.5 ) پیدا کرد. این امکان اتصال شبکه های ناوبری فردی را به شبکه ناوبری نهایی (شکل 6 ).
3. نتایج
3.1. شبکه ناوبری از داده های کاداستر سه بعدی
برای مطالعه موردی کاداستر سهبعدی، دادههای ورودی روی ساختمانها متمرکز شدهاند و میتوانند بهعنوان یک نسخه سهبعدی از پلانهای طبقه دوبعدی سنتی مورد استفاده برای ثبت آپارتمان مشخص شوند. دامنه مجموعه داده انتخابی مورد استفاده در مطالعه موردی به دادههای کاداستر محدود میشود، که بر نمایش وضعیت قانونی (به عنوان مثال، واحدهای دارایی واقعی) با استفاده از فضاهای داخلی به عنوان یک واحد فضایی هسته، که توسط ساختار فیزیکی تعریف میشود، متمرکز است. ساختمان. ارجاع وضعیت حقوقی به ساختار فیزیکی ساختمان برای ثبت مالکیت کاندومینیوم یا طبقات با استفاده از پلان های دوبعدی در بسیاری از کشورهای جهان شناخته شده است. فضاهای داخلی سه بعدی، مدلسازی شده با هندسههای جامد، نشاندهنده هسته مدل دادههای آزمایشی است که در [ 24 ] نیز مورد بحث قرار گرفته است.]. از آنجایی که تمرکز مطالعه موردی بر روی آزمایش عملکرد روشهای توسعهیافته بود، از چهار مجموعه داده کاداستر سهبعدی عمومی، متشکل از یک، سه، شش و نه طبقه با طرح افقی یکسان و یک اتصال عمودی در هر طبقه استفاده شد ( شکل 7).). مجموعه داده های آزمون با استفاده از نرم افزار مدل سازی سه بعدی SketchUp مدل سازی شدند. اتصالات بین فضاهای داخلی (به عنوان مثال، درها) توسط سطوح مشترک انجام می شود که استخراج اطلاعات توپولوژی را با استفاده از توابع هندسه سه بعدی SFCGAL امکان پذیر می کند. واحدهای ملکی را می توان با تجمیع فضاهای مربوطه، یعنی واحدهای فضایی، به دست آورد. اگر فرمت داده توسط FME پشتیبانی شود و اگر از همان اصل مدلسازی داده پیروی کند، با داشتن هندسههای سهبعدی فضاهای داخلی در روابط لمسی، میتوان روشهای پیشنهادی را برای هر مجموعه داده کاداستری سه بعدی دیگر اعمال کرد. رویکرد مدلسازی چنین مجموعههای داده از اسناد دو بعدی موجود، که در بسیاری از کشورهای جهان یافت میشود، در [ 24 ] پیشنهاد شده است.
تمام مجموعه دادههای آزمون با هر سه روش ارائهشده به منظور ارزیابی عملکرد هر روش و پرسشهای SQL موجود در هر روش پردازش شدند. زمان پردازش به عنوان نتیجه استفاده می شود. در حالی که آنها مقایسه های نسبی را امکان پذیر می کنند، به شدت به سخت افزاری که برای پردازش استفاده می شود بستگی دارند. تمامی تست ها بر روی یک کامپیوتر مجهز به پردازنده i7-8565U، 16 گیگابایت رم و هارد دیسک SSD انجام شد. جدول 1 نتایج پردازش روش اول و دوم را خلاصه می کند. جدول 2 نتایج روش سوم را خلاصه می کند. برای هر روش، یک زمان پردازش کامل داده می شود که شامل تمام فرآیندهای FME و PostGIS می شود. علاوه بر این، زمان های اجرای پرس و جو برای هر کوئری که در متد گنجانده شده است، داده می شود. زمان پردازش برای Queryضمیمه A.2 در جدول 2 از جدول 1 تکرار می شود، زیرا هم پرس و جو و هم داده ها برای هر دو روش ضمیمه A یکسان هستند .
3.2. شبکه ناوبری از داده های IFC
مطالعه موردی دوم بر اساس نمونه پروژه IFC فایل از BIMcollab [ 36 ] برای ساختمان نوع اداری است ( شکل 8 ). از آنجایی که نسخههای بسیاری از مدلهای IFC وجود دارد، باید تأکید کرد که روش ما را میتوان با موفقیت فقط برای مدلهایی که حاوی نهادهای IfcSpace ، IfcDoor و IfcStair هستند، اعمال کرد.
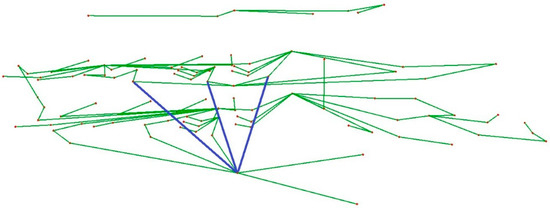
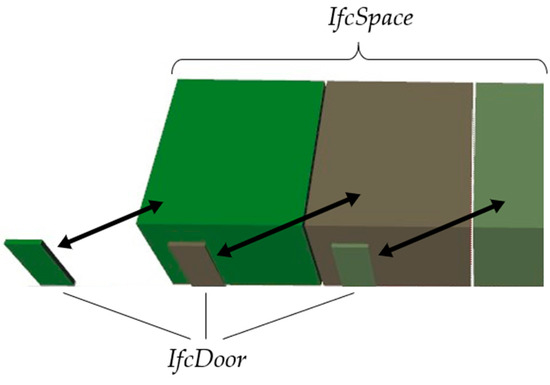
فایل ورودی IFC در FME وارد و تجزیه شد و امکان انتخاب نهادهای IFC منفرد را فراهم کرد. ابتدا، ما انتخاب موجودیت ها را به IfcSpace ، IfcDoor محدود کردیم . هندسه ها را بر اساس نوع هندسه فیلتر کردیم، جایی که فقط هندسه های جامد از آن عبور می کردند. فیلتر دیگری فقط جامدادی درب را با مقدار مشخصه Name “Box” و جامدات فضایی با مقدار مشخصه Name “Body” عبور می دهد. برای درها، نمایش هندسه جعبه به دلیل نمایش هندسه پیچیده بدنه انتخاب شد. هندسه درها و فضاها در پایگاه داده PostGIS (جدول فضاها و درها ) درج شد، جایی که یک پرس و جو ( پیوست A.6 )) با انتخاب درها و فضاهایی که در فضای سه بعدی تلاقی می کنند، اجرا شد. این فرآیند با روش اول ما (فقط با استفاده از تابع ST_3DI intersects ) همسو میشود، اما نتایجی مشابه روش دوم (NRSE) به دست میدهد، زیرا درها به عنوان فضا در نظر گرفته میشوند. این رویکرد می تواند برای استخراج یک شبکه ناوبری برای یک طبقه استفاده شود زیرا فاقد اتصالات عمودی است که با نهادهای IfcStair مدل شده است. برای اضافه کردن آنها، هندسه های جامد IfcStair را با مقدار مشخصه Name “Box” انتخاب کرده و آنها را در پایگاه داده ( پله های جدول ) قرار می دهیم. اتحاد سه پرس و جو ( پیوست A.7) جفت در و فضاهای متقاطع، جفت فضاها و پله های متقاطع و جفت پله های متقاطع را انتخاب می کند. شکل 9 شبکه ناوبری به دست آمده از نتیجه این پرس و جوها را نشان می دهد. نتیجه شامل ارتباطات بین تمام ویژگی هایی است که در یک رابطه متقاطع هستند. برخی از درها با فضاهایی که در طبقه متفاوتی هستند تلاقی میکنند و در نتیجه اتصالات عمودی بین فضاها وجود ندارد (خطوط آبی در شکل 9 ). برای جلوگیری از استخراج این اتصالات، پرس و جو ضمیمه A.7 با سه پرس و جو جداگانه ( پیوست A.8 ) با یکی با استفاده از ST_3Dintersection جایگزین شد.تابعی که هندسه تقاطع را خروجی می دهد. اتصالات موجود در FME با استفاده از گستره عمودی هندسه های تقاطع فیلتر شدند.
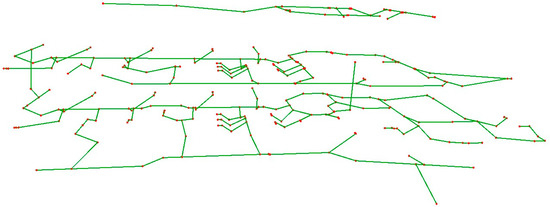
در مرحله دوم، ما سومین روش پیشنهادی را به کار بردیم که از تابع SFCGAL ST_ApproximateMedialAxis برای متراکم کردن شبکه ناوبری و مناسب ساختن آن برای برنامه های برنامه ریزی مسیر استفاده می کند. شکل 10 شبکه ناوبری به دست آمده با اعمال روش سوم را نشان می دهد.
جدول 3 نتایج پردازش فایل IFC آزمایشی را که شامل 51 IfcSpace ، 58 IfcDoor و 3 نهاد IfcStair است، خلاصه می کند. اولین روشی که ساختار شبکه NRSE را ایجاد کرد با استفاده از پرس و جوهای ضمیمه A.6 ، ضمیمه A.7 و ضمیمه A.8 پیاده سازی شد ، در حالی که روش سوم با استفاده از پرس و جوهای ضمیمه A.8 ، همراه با پرسش های ضمیمه A.3 پیاده سازی شد. پیوست A.4 و ضمیمه A.5 برای محاسبه تقریبی محورهای میانی و یافتن نزدیکترین نقاط اتصال روی آنها.
4. بحث
روش های پیشنهادی برای استخراج شبکه ناوبری داخلی از توابع پیشرفته SFCGAL استفاده می کند که هندسه ها را به صورت سه بعدی پردازش می کند. این ما را قادر میسازد تا بسته به هندسه کاملاً خودکار با دادههای سه بعدی کار کنیم. در دو بعدی، می توان از یک رویکرد مشابه استفاده کرد، اما برای جلوگیری از همپوشانی عمودی ویژگی ها، که نمی تواند به درستی توسط الگوریتم های دوبعدی مدیریت شود، ساختمان به طبقات تقسیم می شود. تقسیم بندی به اطلاعات معنایی در مدل های ساختمان بستگی دارد یا باید به صورت دستی انجام شود. همچنین مشکل مونتاژ تمام طبقات پردازش شده در یک مدل به صورت عمودی وجود دارد. با این حال، در برخی از بخشهای فرآیند، باید از هندسههای دو بعدی نیز استفاده کنیم. مورد اول قرارگیری مرکز و مورد دوم محاسبه محور تقریبی میانی است. هر دو فرآیند برای محاسبه قرارگیری گره های شبکه ناوبری استفاده می شوند. قبل از تبدیل هندسه ها به دو بعدی، مرزهای عمودی آنها محاسبه می شود تا امکان قرارگیری سه بعدی گره های محاسبه شده را فراهم کند. ما از centroids خارجی در 2D با گزینه ای در FME که تضمین می کند نقطه در داخل چند ضلعی دو بعدی باشد اجتناب می کنیم. گره ها به صورت سه بعدی با استفاده از مقدار میانی مرزهای عمودی هندسه های فضا قرار می گیرند. در برخی موارد که هندسه فضاها پیچیده تر است، گره ها را می توان خارج از هندسه سه بعدی فضا قرار داد. گره ها به صورت سه بعدی با استفاده از مقدار میانی مرزهای عمودی هندسه های فضا قرار می گیرند. در برخی موارد که هندسه فضاها پیچیده تر است، گره ها را می توان خارج از هندسه سه بعدی فضا قرار داد. گره ها به صورت سه بعدی با استفاده از مقدار میانی مرزهای عمودی هندسه های فضا قرار می گیرند. در برخی موارد که هندسه فضاها پیچیده تر است، گره ها را می توان خارج از هندسه سه بعدی فضا قرار داد.شکل 11 ).
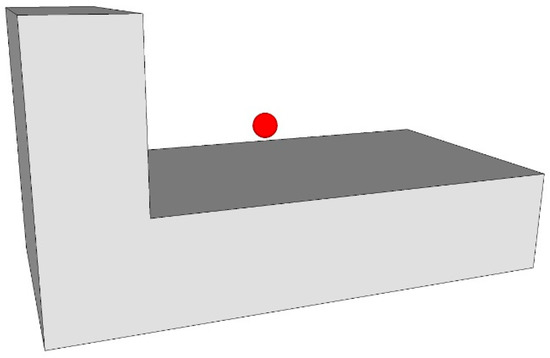
این خطاها را می توان با پردازش اضافی در PostGIS پیدا کرد. گرهها باید در PostGIS وارد شوند، جایی که میتوانیم شناسههای هندسه جامد را پیدا کنیم که شامل گره مربوطه با استفاده از پرس و جوی SQL نیست ( پیوست A.9 ). پرس و جو از تابع محاسباتی ST_3Dintersection استفاده می کند. دلیل آن این است که تابع ST_3DIintersects هنگام مقایسه هندسه جامد و هندسه نقطه به درستی کار نمی کند. در عوض، تقاطع ST_3Dاز تابع برای بررسی خالی بودن هندسه تقاطع استفاده می شود، به این معنی که گره خارج از هندسه جامد مربوطه است. گزینه دیگری که از خطاهای ارائه شده جلوگیری می کند، ایجاد یک خط عمودی برای هر گره و تقاطع آن با هندسه فضا ( شکل 12 ) با استفاده از پرس و جوی SQL ( پیوست A.10 ) است. خط در محل گره قرار می گیرد و وسعت عمودی بیشتری نسبت به هندسه فضا دارد. گره ای که در داخل هندسه فضا قرار دارد (نقطه قرمز) بین تقاطع های محاسبه شده (نقاط سبز) قرار دارد. به دلیل استفاده از تقاطع ST_3Dتابع، هر دو رویکرد به طور قابل توجهی عملکرد روش های پیشنهادی را کاهش می دهند، به ویژه روش سوم، که در آن گره های شبکه زیادی برای هر فضا ایجاد می شود. تحقیقات بیشتری برای بهبود عملکرد رویکردهای ارائه شده برای قرار دادن گره در هندسه های سه بعدی مورد نیاز است.
نتایج اولین مطالعه موردی ( جدول 1 و جدول 2 ) بهترین عملکرد روش اول را نشان می دهد که اساسی ترین نتایج را ایجاد می کند. با این حال، نتایج روش اول میتواند به عنوان ورودی برای روشهای پیشرفتهتر استخراج شبکه ناوبری داخلی استفاده شود [ 33 ]. در حالی که سهم زمانی زمان اجرای پرس و جو SQL ضمیمه A.1 برای روش اول کم است، زمان اجرای پرس و جو SQL ضمیمه A.2 بیشتر زمان پردازش روش های 2 و 3 را نشان می دهد. این امر توسط SFCGAL ایجاد می شود. ST_3D تابع تقاطع از نظر محاسباتی بسیار بیشتر از SFCGAL ST_3Dتقاطع استتابع. زمان پردازش FME تقریباً برای همه روشها یکسان است و با افزایش تعداد فضاهای پردازش شده به صورت خطی افزایش مییابد. تفاوت در زمان پردازش برای روشهای 2 و 3 حداقل است زیرا درخواست پیوست A.2 برای هر دو روش یکسان است. پرسوجوهای اضافی در روش 3 که محورهای میانی تقریبی و اتصالات آنها را محاسبه میکنند، اساساً از نظر زمان اجرا بیاهمیت هستند، زیرا همه آنها در کمتر از 0.6 ثانیه برای همه موارد اجرا میشوند. مدل دادههای کاداستر سهبعدی که در این مطالعه موردی استفاده میشود، هنگامی که با استفاده از توابع سهبعدی پردازش میشود، مزیت بیشتری دارد. هندسه تقاطع محاسبه شده در روش های 2 و 3 با استفاده از تابع تقاطع ST_3D یک سطح است. تابع SFCGAL ST_3DAreaمی توان از آن برای محاسبه مساحت یک تقاطع استفاده کرد تا بررسی شود که آیا گذرگاه برای یک نوع حرکت خاص قابل پیمایش است یا خیر.
نتایج مطالعه موردی دوم ( جدول 3 ) ثابت میکند که روشهای پیشنهادی میتوانند به طور کارآمدی برای دادههای IFC اعمال شوند که دارای موجودیتهای مورد نیاز ( IfcSpace ، IfcDoor و IfcStair ) باشند. از آنجایی که مدل دادههای IFC استاندارد شده است، هر مجموعه داده دیگر IFC که حاوی این موجودیتها باشد، میتواند همانند مجموعه داده آزمایشی پردازش شود. روش 2 در این مطالعه موردی مورد استفاده قرار نگرفت زیرا هدف آن استخراج گره ها در اتصالات فضاها (جایی که آنها را لمس می کنند) و هندسه های IfcSpace یکدیگر را لمس نمی کنند. در ترکیب با IfcDoorهندسه، روش 1 نتایج مشابه روش 2 را در مطالعه موردی اول ایجاد می کند. پرس و جو A8 خطاهای شبکه ناوبری را کاهش می دهد، اما نیاز به استفاده از تابع ST_3DIintersection دارد که عملکرد پرس و جو را به میزان قابل توجهی کاهش می دهد.
در مدل دادههای کاداستر، فضاهای پلکانی همانند فضاهای دیگر مدلسازی شدهاند که در مورد مدل دادههای IFC صدق نمیکند. اگر پله ها در داخل ساختمان قرار داشته باشند، رویکرد ما با موفقیت اتصالات عمودی را استخراج کرده است. برخی از نهادهای IfcStair در مجموعه داده آزمایشی هیچ تماس هندسی با سایر نهادهای IfcStair یا هر یک از نهادهای IfcDoor و IfcSpace ندارند ، که باعث شد برخی از اتصالات عمودی حذف شوند. این را می توان در قسمت بالای شکل 9 و شکل 10 مشاهده کرد، جایی که بخشی از شبکه ناوبری به بقیه شبکه متصل نیست. این یک نقطه ضعف روشهای مبتنی بر هندسه است، زیرا در صورتی که هندسههای ویژگیها از نظر فضایی از هم جدا باشند، هیچ گزینهای برای استخراج اتصال وجود ندارد. در این موارد روش هایی که مبتنی بر اطلاعات معنایی هستند دارای مزیت هستند. ما رویکرد خود را با رویکردهای مبتنی بر معنایی [ 30 ، 31 ] مقایسه کردیم، که از موجودیتهای IfcRelSpaceBoundary برای استخراج شبکه ناوبری از مجموعه داده IFC استفاده میکنند. مقایسه را می توان فقط برای مدل های IFC انجام داد، که دارای موجودیت IfcRelSpaceBoundary نیز هستند . ما ویژگی RelatingSpace را از موجودیت IfcRelSpaceBoundary بهIfcDoor ، بنابراین اطلاعاتی در مورد روابط IfcDoor و IfcSpace که برای استخراج شبکه ناوبری استفاده می شد به دست می آورد. این فرآیند بسیار سریع بود، زیرا اتصالات بر اساس ویژگی ها پیدا شدند. با این حال، متوجه شدیم که موجودیتهای IfcRelSpaceBoundary حاوی خطاهایی هستند که باعث ایجاد برخی اتصالات اشتباه بین فضاها و درها میشود که در شکل 13 نشان داده شده است. لازم به ذکر است که فایل های موجود در سال 2020 برای این خطاها تغییر و اصلاح شدند.
نتایج مطالعات موردی نشان می دهد که کیفیت شبکه ناوبری استخراج شده به عوامل متعددی بستگی دارد. اولی مدل داده داده های ورودی است که نحوه ساختار و مدل سازی داده های ورودی را تعیین می کند. در نتیجه، تعیین میکند که دادههای ورودی چقدر از استخراج شبکه ناوبری مبتنی بر هندسه پشتیبانی میکنند. در مطالعات موردی، مجموعه داده کاداستر سه بعدی هیچ مشکلی با استخراج شبکه ناوبری برای پله ها ایجاد نمی کند، در حالی که برای مجموعه داده IFC، برخی از اتصالات عمودی را نمی توان بر اساس توابع هندسه SFCGAL استخراج کرد. از آنجایی که مقاله بر روی استفاده از توابع SFCGAL متمرکز است، کیفیت شبکه ناوبری استخراج شده با روشهای پیشنهادی توسط قابلیتهای محدود آن توابع محدود میشود. برای روش سوم ازتابع ST_ApproximateMedialAxis برای استخراج شبکه ناوبری در داخل هر اتاق. برای فضاهای بزرگتر، شبکه ای را تولید می کند که برای برنامه ریزی مسیرهای داخلی کمتر مناسب است. راه حل های پیشرفته تری وجود دارد که از سوی دیگر به داشتن اتصال اتاق در دسترس است [ 33 ]. گزینههای ادغام این راهحلها با روشهای پیشنهادی باید در آینده مورد بررسی قرار گیرند تا بهطور خودکار شبکههای ناوبری پیشرفتهتر، مناسب برای برنامهریزی مسیرهای داخلی به دست آیند. از جمله مهم ترین عواملی که بر کیفیت نتایج تأثیر می گذارد، خطا در داده های ورودی است. ما نشان دادیم که چگونه خطاها در IfcRelSpaceBoundary وجود داردموجودیت بر استخراج شبکه ناوبری مبتنی بر معنایی تأثیر می گذارد. رویکرد مبتنی بر هندسه ارائه شده به خطاهای هندسی حساس است. در مدل داده های کاداستر سه بعدی، فضاهای داخلی متصل باید در یک رابطه لمسی باشند. در فرآیند مدل سازی سه بعدی یا پردازش داده های ورودی، ممکن است شکاف هایی بین فضاها ایجاد شود. این شکاف ها باعث شکست روش ها در استخراج اتصالات می شود. راهحل ممکن برای شکافهای کوچک گرد کردن مختصات است، اما میتواند در برخی موارد شکاف را بزرگتر کند (مثلاً 0.149 به 0.1 و 0.151 به 0.2 گرد میشود). راه حل این است که یک تنظیم تحمل انعطاف پذیر برای پردازش هندسی داشته باشید، اما این برای توابع SFCGAL در دسترس نیست. نهادهای IFC می توانند چندین نمایش هندسی داشته باشند. به دلیل پیچیدگی نمایش «بدن»،نهادهای IfcDoor و IfcStair . استفاده از این هندسههای کمتر پیچیده میتواند باعث شود تا برخی از اتصالات غیرموجود با روشهای پیشنهادی ما شناسایی شوند. همانطور که قبلاً گفته شد، روشهای پیشنهادی را میتوان برای هر فایل IFC که حاوی نهادهای IfcSpace ، IfcDoor و IfcStair است، اعمال کرد، اما باید از محدودیتهای ارائهشده که میتواند بر کیفیت شبکه ناوبری استخراجشده تأثیر بگذارد آگاه بود. تحقیقات آینده برای بررسی استفاده تکمیلی از روشهای مبتنی بر هندسه پیشنهادی همراه با رویکردهای مبتنی بر معنایی که تحت تأثیر هندسههای نامعتبر و بیش از حد پیچیده قرار نمیگیرند، مورد نیاز است.
5. نتیجه گیری ها
روش ارائه شده برای استخراج شبکه ناوبری داخلی مبتنی بر هندسه با استفاده از توابع SFCGAL که از هندسه های سه بعدی پشتیبانی می کنند، توسعه یافته است. این اجازه می دهد تا از هندسه های سه بعدی اصلی مدل های ساختمان در فرآیندی بدون تقسیم مدل های ساختمان به طبقات جداگانه استفاده شود. روش توسعهیافته اتوماسیون کامل فرآیند را از وارد کردن دادههای ورودی تا نتیجه نهایی در قالب یک شبکه ناوبری امکانپذیر میسازد. سه روش برای نشان دادن امکانات استفاده از توابع SFCGAL برای استخراج شبکه ناوبری مبتنی بر هندسه توسعه داده شده است. روش ها در پیچیدگی شبکه ناوبری خروجی متفاوت است. برای دستیابی به انعطاف پذیری از نظر داده های ورودی و دسترسی به توابع SFCGAL، نرم افزار ETL فضایی FME، از طیف گسترده ای از فرمت های داده پشتیبانی می کند. با پایگاه داده PostGIS ادغام شد و دسترسی به توابع SFCGAL را فراهم کرد. تحقیقات آتی می تواند احتمالات استفاده از نرم افزارهای جایگزین را برای اجرای روش های پیشنهادی بررسی کند. طیف وسیعی از فرمتهای پشتیبانی شده و انعطافپذیری نرمافزار FME به روشهای پیشنهادی اجازه میدهد تا بر روی مجموعه دادههای مختلفی که اطلاعات داخلی سهبعدی را علاوه بر دادههای مطالعه موردی (مثلاً مدلهای CityGML LOD 4 یا فایلهای DWG) ارائه میدهند، اعمال شود که همچنین نیاز به بررسی دارد. در آینده. پیش پردازش هندسه ها برای اجرای کارآمد روش های پیشنهادی بسیار مهم است. تجمیع انواع هندسه ورودی و مثلثسازی سطح در FME یک روش کارآمد برای به دست آوردن هندسه جامد معتبر در PostGIS است که میتواند با استفاده از توابع SFCGAL تجزیه و تحلیل شود. از پرس و جوهای SQL برای پردازش هندسه های سه بعدی و استخراج اطلاعات اتصال استفاده شد. علاوه بر استخراج شبکه ناوبری، از این ادغام می توان برای انجام تحلیل های سه بعدی مختلف داده های مکانی استفاده کرد.
مطالعات موردی نشان میدهد که روشهای پیشنهادی به اندازه کافی کارآمد هستند تا پردازش مجموعه دادههای بزرگتر را امکانپذیر کنند. مطالعه موردی با مجموعه داده کاداستر سه بعدی با هدف تاکید بر نقش چند منظوره یک سیستم و داده های کاداستر سه بعدی در آینده است. در حالی که هندسه های سه بعدی فضاهای داخلی به طور قابل توجهی به روشن شدن وضعیت حقوقی ساختمان کمک می کنند، اما اگر ساختار مناسبی داشته باشند، می توانند از بسیاری از برنامه های جدید از جمله ناوبری داخلی نیز پشتیبانی کنند. مطالعه موردی دوم برخی از کاستیهای روش ارائه شده را هنگام اعمال بر دادههای IFC نشان داد. اگرچه بیشتر اتصالات به صورت سه بعدی شناسایی و به درستی مدلسازی شدند، برخی از اتصالات به دلیل اینکه روش کاملاً مبتنی بر هندسه و کاملاً خودکار است، یافت نشد. علاوه بر این، روش پیشنهادی می تواند برای اعتبار سنجی استفاده شودنهادهای IfcRelSpaceBoundary . در مجموعه داده آزمایشی، آنها برخی از اتصالات فیزیکی غیرممکن را ارائه کردند که با استفاده از روش پیشنهادی کشف شدند.
پیوست اول
ضمیمه A.1. پرس و جوی SQL برای انتخاب شناسه های هندسه هایی که در فضای سه بعدی متقاطع می شوند – روش 1
a.sn را به عنوان شروع، b.sn را به عنوان پایان از فضاهای a، فاصله b انتخاب کنید
WHERE ST_3Dقطع می کند (a.geom، b.geom) و a.sn! = b.sn
ضمیمه A.2. پرس و جوی SQL برای انتخاب شناسه ها و هندسه تقاطع هندسه هایی که در فضای سه بعدی متقاطع می شوند – روش 2
a.sn به عنوان شروع، b.sn به عنوان پایان، ST_3Dتقاطع(a.geom، b.geom) FROM فضاهای a، فاصله b
WHERE ST_3Dقطع می کند (a.geom، b.geom) و a.sn! = b.sn
ضمیمه A.3. پرس و جوی SQL که یک محور میانی تقریبی برای هر فضا ایجاد می کند
SELECT sn، ST_ApproximateMedialAxis(geom) به عنوان geom FROM spaces2d
ضمیمه A.4. پرس و جوی SQL که نقاطی را از محور میانی تقریبی برای هر فضا ایجاد می کند
SELECT sn، (ST_DumpPoints (ST_ApproximateMedialAxis(geom)).geom به عنوان geom FROM spaces2d
ضمیمه A.5. پرس و جوی SQL که نزدیک ترین نقاط را در لبه های شبکه های متصل پیدا می کند
a.id، b.sn، ST_ClosestPoint (b.geom، a.geom) را انتخاب کنید
از اتصالات a
پیوستن داخلی
(انتخاب pn، ST_ApproximateMedialAxis (geom) به عنوان geom FROM spaces2d) b
ON a.start = b.sn یا a.end = b.sn
ضمیمه A.6. پرس و جوی SQL برای انتخاب درها و فضاهای متقاطع
a.id را به عنوان شروع، b.id را به عنوان پایان از درها انتخاب کنید
JOIN فضاهای b روی ST_3قطع می کند (a.geom، b.geom)
ضمیمه A.7. پرس و جوی SQL برای انتخاب درها، فضاها و پله های متقاطع
a.id را به عنوان شروع، b.id را به عنوان پایان از درها انتخاب کنید
JOIN فضاهای b روی ST_3قطع می کند (a.geom، b.geom)
اتحاد همه
a.id را به عنوان شروع، b.id را به عنوان پایان از پلهها انتخاب کنید
JOIN فضاهای b روی ST_3قطع می کند (a.geom، b.geom)
اتحاد همه
a.id را به عنوان شروع، b.id را به عنوان پایان از پلهها انتخاب کنید
به پلهها بپیوندید b روی ST_3قطعها (a.geom، b.geom)
AND a.id < b.id
ضمیمه A.8. پرسشهای SQL برای انتخاب درها، فضاها و پلههای متقاطع با هندسه تقاطع اضافه شده برای تقاطعهای در-فضا
a.id را به عنوان شروع، b.id به عنوان پایان، ST_3Dتقاطع (a.geom، b.geom) از درهای a
JOIN فضاهای b روی ST_3قطع می کند (a.geom، b.geom)
a.id را به عنوان شروع، b.id را به عنوان پایان از پلهها انتخاب کنید
JOIN فضاهای b روی ST_3قطع می کند (a.geom، b.geom)
a.id را به عنوان شروع، b.id را به عنوان پایان از پلهها انتخاب کنید
به پلهها بپیوندید b روی ST_3قطعها (a.geom، b.geom)
AND a.gid < b.gid
ضمیمه A.9. پرس و جوی SQL برای انتخاب فضاهایی که حاوی Centroid مربوطه نیستند
a.sn را از فضاهای a، مرکز b انتخاب کنید
WHERE a.sn = b.sn و ST_IsEmpty (ST_3Dتقاطع(ST_MakeSolid (a.geom)، b.geom))
ضمیمه A.10. پرس و جوی SQL که نقاط متقاطع خطوط و فضاها را برای قرار دادن Centroid به صورت سه بعدی انتخاب می کند.
SELECT a.sn، ST_3Dتقاطع (a.geom، b.geom) FROM فضاهای a، خطوط b
WHERE a.sn = b.sn
منابع
- بیلجکی، اف. استوتر، جی. لدوکس، اچ. زلاتانوا، اس. Çöltekin، A. کاربردهای مدل های سه بعدی شهر: بررسی وضعیت هنر. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2842-2889. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوندوز، م. ایسیکداغ، یو. Basaraner, M. مروری بر تحقیقات اخیر در مدل سازی و نقشه برداری داخلی. ISPRS–Int. قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2016 ، 41 ، 289-294. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیو، ایکس. وانگ، ایکس. رایت، جی. چنگ، جی. لی، ایکس. لیو، آر. بررسی پیشرفتهای در مورد ادغام مدلسازی اطلاعات ساختمان (BIM) و سیستم اطلاعات جغرافیایی (GIS). ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 53. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- رحمان، AA پیشرفت در اطلاعات جغرافیایی سه بعدی ؛ Springer International Publishing: Cham, Switzerland, 2017. [ Google Scholar ] [ CrossRef ]
- برنا، RF; گارسیا وازکز، جی پی. Galvan-Tejada، CE; مونوز-رودریگز، دی. بارگاس-روزالس، سی. Fangmeyer, J. تکامل فن آوری های موقعیت یابی داخلی: یک بررسی. J. Sens. 2017 , 6 , 359. [ Google Scholar ] [ CrossRef ]
- پل، ن. بورمن، الف. رویکردهای هندسی و توپولوژیکی در مدلسازی اطلاعات ساختمان. J. Inf. تکنولوژی ساخت و ساز 2009 ، 14 ، 705-723. [ Google Scholar ]
- گروگر، جی. Plümer, L. نحوه دستیابی به سازگاری برای مدل های سه بعدی شهر. GeoInformatica 2011 ، 15 ، 137-165. [ Google Scholar ] [ CrossRef ]
- ژائو، ز. استوتر، جی. Ledoux, H. چارچوبی برای تعمیر هندسی خودکار مدلهای CityGML. در Cartography from Pole to Pole, Lecture Notes in Geoinformation and Cartography . Buchroithner, M., Prechtel, N., Burghardt, D., Eds. Springer: Berlin/Heidelberg, Germany, 2014. [ Google Scholar ] [ CrossRef ]
- دنگ، ی. چنگ، JCP; Anumba، C. نقشه برداری بین BIM و 3D GIS در سطوح مختلف جزئیات با استفاده از میانجیگری طرحواره و مقایسه نمونه. خودکار ساخت و ساز 2016 ، 67 ، 1-21. [ Google Scholar ] [ CrossRef ]
- اوهوری، کالیفرنیا؛ دیاکیته، آ. کریجنن، تی. لدوکس، اچ. Stoter، J. پردازش مدل های BIM و GIS در عمل: تجربیات و توصیه های یک پروژه GeoBIM در هلند. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 23. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Knoth، L. شولز، جی. استروبل، جی. میتلبوک، ام. وکنر، بی. آتزل، سی. رجبی فرد، ع. عطازاده، ب. مدل های ساخت متقابل دامنه-گامی به سوی قابلیت همکاری. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 363. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Diakité، AA; Zlatanova، S. شرح فضای معتبر در BIM برای ناوبری سه بعدی داخلی. بین المللی J. 3-D Inf. مدلسازی 2016 ، 5 ، 1-17. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کانگ، H.-K. لی، ک.-جی. یک مدل استاندارد داده فضایی داخلی – OGC IndoorGML و رویکردهای پیاده سازی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 116. [ Google Scholar ] [ CrossRef ]
- Xiong، Q. زو، س. دو، ز. زلاتانوا، اس. ژانگ، ی. ژو، ی. Li, Y. استخراج رایگان فضای داخلی چند طبقه از مدل های پیچیده ساختمان های سه بعدی. علوم زمین آگاه کردن. 2017 ، 10 ، 69-83. [ Google Scholar ] [ CrossRef ]
- یانگ، ال. Worboys, M. Generation of Navigation graphs for space indoor. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 1737-1756. [ Google Scholar ] [ CrossRef ]
- Diakité، AA; زلاتانوا، اس. استخراج فضای آزاد سه بعدی از مدل های ساختمان برای ناوبری داخلی. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، 4 ، 241-248. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لین، ز. خو، ز. هو، دی. هو، کیو. لی، دبلیو. مدل داده های فضایی ترکیبی برای فضای داخلی: توپولوژی و شبکه ترکیبی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 343. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مرتاری، ف. کلمنتینی، ای. زلاتانوا، اس. لیو، ال. یک مدل ناوبری داخلی و استخراج شبکه آن. Appl. Geomat. 2019 ، 11 ، 413-427. [ Google Scholar ] [ CrossRef ]
- تامسن، سی. استخراج-تبدیل-بار. در دایره المعارف فناوری های داده بزرگ ; Sakr, S., Zomaya, AY, Eds.; انتشارات بین المللی Springer: چم، سوئیس، 2019; صص 728-733. [ Google Scholar ] [ CrossRef ]
- SFGGAL. بسته بندی اطراف کتابخانه CGAL برای عملیات دو بعدی و سه بعدی بر اساس استانداردهای OGC. 2019. در دسترس آنلاین: https://www.sfcgal.org (در 5 مارس 2020 قابل دسترسی است).
- کنسرسیوم فضایی باز استاندارد رمزگذاری زبان جغرافیای شهر (CityGML)، نسخه 2.0. 2012. در دسترس آنلاین: https://www.opengeospatial.org/standards/citygml (در 5 مارس 2020 قابل دسترسی است).
- کنسرسیوم فضایی باز IndoorGML، نسخه 1.02. 2014. در دسترس آنلاین: https://www.opengeospatial.org/standards/indoorgml (در 5 مارس 2020 قابل دسترسی است).
- ISO کلاس های بنیاد صنعت (IFC) برای به اشتراک گذاری داده ها در صنایع ساخت و ساز و مدیریت تاسیسات ؛ استاندارد بین المللی ISO 16739-1:2018; سازمان بین المللی استانداردسازی: ژنو، سوئیس، 2018. [ Google Scholar ]
- تکاوک، جی. Lisec، A. دادههای کاداستر به عنوان منبعی برای مدلسازی سه بعدی داخلی. خط مشی استفاده از زمین 2020 ، 104322. [ Google Scholar ] [ CrossRef ]
- آیین، ا. رجبی فرد، ع. کلانتری، م. ویلیامسون، اول. بررسی و ارزیابی مدلهای دادههای کاداستر فعلی برای کاربردهای کاداستر سه بعدی. در پیشرفت در اطلاعات جغرافیایی سه بعدی، یادداشت های سخنرانی در اطلاعات جغرافیایی و کارتوگرافی ؛ رحمان، AA، ویرایش. انتشارات بین المللی اسپرینگر: چم، سوئیس، 2017; صص 423-442. [ Google Scholar ] [ CrossRef ]
- آلاتاس، ا. زلاتانوا، اس. ون اوستروم، پی. Chatzinikolaou، E. لمن، سی. لی، ک.-جی. پشتیبانی از ناوبری داخلی با استفاده از حقوق دسترسی به فضاها بر اساس استفاده ترکیبی از مدلهای IndoorGML و LADM. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 384. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لین، YH; لیو، YS; گائو، جی. هان، XG; لای، سی. Gu, M. برنامه ریزی مسیر مبتنی بر IFC برای فضاهای داخلی سه بعدی. Adv. مهندس آگاه کردن. 2013 ، 27 ، 189-205. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خو، ام. وی، اس. زلاتانوا، اس. Zhang, R. برنامه ریزی مسیر داخلی مبتنی بر BIM با توجه به موانع. ISPRS Ann. فتوگرام از راه دور. حس اسپات. Inf. Sci 2017 , 4 , 417-423. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Staats، BR; Diakité، AA; Voûte, RL; Zlatanova، S. تشخیص درها در یک مدل وکسل، مشتق شده از یک ابر نقطه و مسیر اسکنر آن، برای بهبود بخشبندی فضای قابل راه رفتن. بین المللی J. Urban Sci. 2018 ، 23 ، 369-390. [ Google Scholar ] [ CrossRef ]
- تئو، T.-A. چو، ک.-اچ. مدل شبکه داخلی مبتنی بر BIM برای برنامه ریزی مسیر ترکیبی داخلی و خارجی. Adv. مهندس آگاه کردن. 2016 ، 30 ، 268-282. [ Google Scholar ] [ CrossRef ]
- خان، ع.ا. دوناوبائر، آ. Kolbe، TH یک فرآیند تبدیل چند مرحلهای برای تولید خودکار نمودارهای مسیریابی داخلی از مدلهای ساختمانی سه بعدی معنایی موجود. در مجموعه مقالات نهمین کنفرانس اطلاعات جغرافیایی سه بعدی، دبی، امارات متحده عربی، 11 تا 13 نوامبر 2014. [ Google Scholar ]
- لواندویچ، ای. لیسوفسکی، پ. Flisek، P. یک روش اصلاح شده برای تولید مدل های ناوبری داخلی. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 60. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- بوگوسلاوسکی، پ. مهجوبی، ل. زوروویچ، وی. Fadli, F. ساخت خودکار شبکه های قابل پیمایش با چگالی متغیر در یک محیط داخلی سه بعدی برای پاسخ اضطراری. خودکار ساخت و ساز 2016 ، 72 ، 115-128. [ Google Scholar ] [ CrossRef ]
- لیو، ال. زلاتانوا، اس. به سمت یک مدل شبکه سه بعدی برای ناوبری داخلی. در مدیریت داده های شهری و منطقه ای ; Zlatanova, S., Ledoux, H., Fendel, EM, Rumor, M., Eds. CRCpress/گروه تیلور و فرانسیس: لندن، بریتانیا، 2012. [ Google Scholar ] [ CrossRef ]
- تانگ، اس جی. زو، س. وانگ، WW; Zhang، YT اشتقاق توپولوژی خودکار از مدل ساختمان IFC برای ناوبری هوشمند داخل در. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی – ISPRS Arch. 2015 ، 40 ، 7-11. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- BIMcollab، نمونه ها و الگوها. در دسترس آنلاین: https://www.bimcollab.com/en/Support/Support/Downloads/Examples-templates (در 5 مارس 2020 قابل دسترسی است).
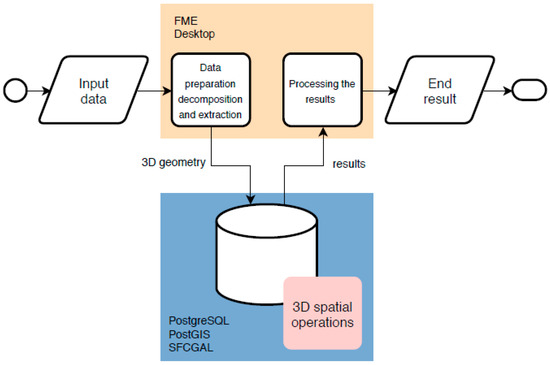
شکل 1. مفهوم یکپارچه سازی داده های مبتنی بر ETL و تجزیه و تحلیل سه بعدی.
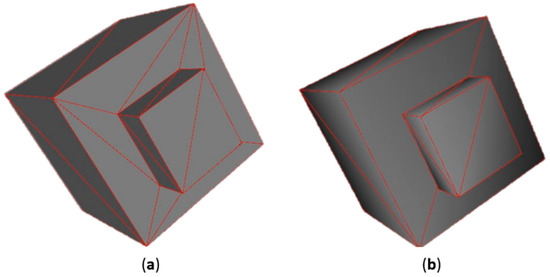
شکل 2. ( الف ) هندسه جامد در FME و ( ب ) سطح چند وجهی وارد شده در PostGIS.
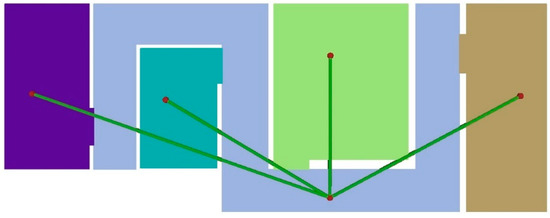
شکل 3. شبکه اصلی ناوبری داخلی (NRS) با گره های قرمز و اتصالات سبز.
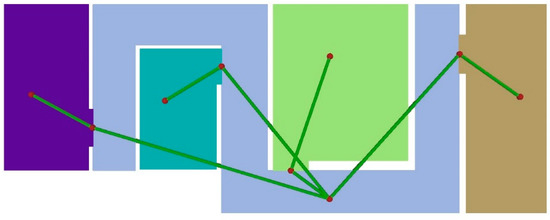
شکل 4. ساختار ارتباط گره و شبکه ناوبری ورودی (NRSE) با گره های قرمز و اتصالات سبز.
شکل 5. روش مشتق NRSE پایه ( a ) و روش اصلاح شده برای فضاهای با اتصالات متعدد ( b ).
شکل 6. نتیجه سومین روش پیشنهادی.
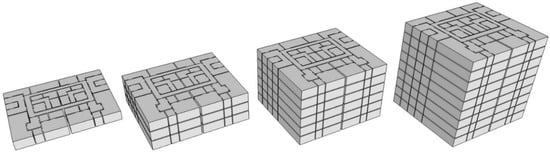
شکل 7. مجموعه داده های کاداستر سه بعدی.
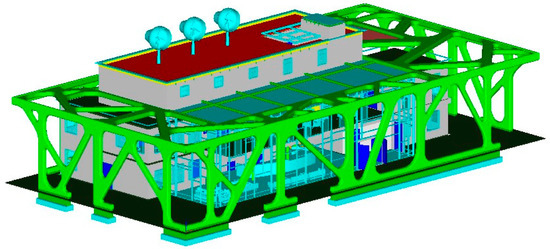
شکل 8. مجموعه داده آزمایشی IFC [ 36 ] که با استفاده از FZK Viewer تجسم شده است.
شکل 9. شبکه ناوبری مشتق شده از مجموعه داده IFC با استفاده از روش اول.
شکل 10. شبکه ناوبری برگرفته از مجموعه داده IFC با اعمال روش سوم.
شکل 11. گره (قرمز) به دلیل ارتفاع سقف متغیر خارج از هندسه جامد قرار گرفته است.

شکل 12. تقاطع خط-فضا (سبز) و مرکز (قرمز).
شکل 13. خطاهای روابط IfcSpace و IfcDoor (دارای رنگ مساوی) از موجودیت IfcRelSpaceBoundary بازیابی شده است.


بدون دیدگاه