

چکیده
شرکت های صنعت جنگل از سیستم های مدیریت کیفیت در عملیات تهیه چوب خود استفاده می کنند. داده های کیفیت مکانی برای بهبود کیفیت برداشت چوب و دستیابی به پایداری محیطی استفاده می شود. برخی از مطالعات سیستم های مدیریت جدیدی را بر اساس LiDAR پیشنهاد کرده اند. هدف اصلی این مطالعه بررسی این موضوع بود که چگونه سیستمهای برنامهریزی کارآمد میتوانند مناطقی را برای برداشت چوب به صورت پیشینی با توجه به جلوگیری از آسیب برداشت ناشی از ماشینآلات جنگل انتخاب کنند. بررسی ادبیات امکان استفاده از GIS را نشان داد و مطالعات موردی معیارهای مورد نیاز برای پیشبینی سطوح کیفی مورد نیاز را نشان داد. LiDAR زمینی را می توان در سیستم های کنترل کیفیت مقامات استفاده کرد، اما برای برنامه ریزی از قبل بدون جمع آوری داده های پرتو گامای زمینی ناکارآمد است. اطلاعات هوابرد LiDAR و اشعه گاما در مورد خاکهای جنگلی را فقط میتوان برای برنامهریزی مناطق بزرگتر در سطح جنگل استفاده کرد، زیرا این اطلاعات شامل عدم قطعیت بسیار زیادی است که امکان استفاده از آن را برای برنامهریزی در مناطق کوچک قبل از عملیات برداشت چوب شامل تهیه چوب فراهم میکند. علاوه بر این، LiDAR موجود در هوا، حتی در سطح جنگل، برای برنامه ریزی سیستم های تهیه چوب به اندازه کافی دقیق نیست زیرا برداشت چوب بدون اندازه گیری های میدانی چالش برانگیز است. بنابراین نیاز به استفاده از رادار دستی نفوذ به زمین برای تعیین ضخامت لایه پیت و عمق تا سطح آب زیرزمینی وجود دارد. برای برنامه ریزی سیستم های تهیه چوب زیرا برداشت چوب بدون اندازه گیری های میدانی چالش برانگیز است. بنابراین نیاز به استفاده از رادار دستی نفوذ به زمین برای تعیین ضخامت لایه پیت و عمق تا سطح آب زیرزمینی وجود دارد. برای برنامه ریزی سیستم های تهیه چوب زیرا برداشت چوب بدون اندازه گیری های میدانی چالش برانگیز است. بنابراین نیاز به استفاده از رادار دستی نفوذ به زمین برای تعیین ضخامت لایه پیت و عمق تا سطح آب زیرزمینی وجود دارد.
کلید واژه ها:
GIS ; اسکن لیزری ؛ عکاسی ؛ پایداری ؛ صنعت جنگل ; آسیب درخت ؛ شیار شدن خاک ؛ کیفیت برداشت چوب
1. مقدمه
در فنلاند می توان از منابع ملی چوب برای جایگزینی مواد فسیلی خام و کاهش مصرف سوخت استفاده کرد زیرا افزایش سالانه بیشتر از کاهش ذخایر چوب جنگل ها است. این وضعیت حدود چهل سال است که وجود داشته است و تهدیدی برای توسعه یک مخزن کربن قابل دوام و تعادل زیست محیطی آن است [ 1 ، 2 ]. بنابراین، به عنوان یک هدف پایداری، سهم منابع تجدیدپذیر باید تا سال 2030 حداقل 50 درصد افزایش یابد. این مقررات توسط دولت فنلاند در هنگام تصویب استراتژی آب و هوا و انرژی برای سال 2030 در سال 2016 تنظیم شد [ 3 ]]. اهداف خوش بینانه گنجانده شده در این استراتژی شامل وضعیت فنلاند به عنوان یک کشور اتحادیه اروپا بدون کربن در سال 2045 و ایجاد تعادل انرژی 100٪ کربن خنثی بین تولید و مصرف است.
کشورهایی مانند فنلاند می توانند از جنگل ها به عنوان منبع انرژی، سوخت و سایر محصولات بدون کربن استفاده کنند [ 4 ]. با این حال، این بدان معناست که عملیات برداشت چوب در مناطق توربزار افزایش مییابد، که در صورت اعمال سیستمهای مدیریت تهیه چوب معمولی، ممکن است خسارت جنگل را افزایش دهد. در نتیجه، لجستیک تهیه چوب بر انتقال سریع به سمت برداشت چوب پایدار از نظر زیست محیطی در زمینهای ذغال سنگ نارس تمرکز خواهد کرد، که بخشی از استراتژی پایداری خواهد بود که توسط شرکتهای صنعت جنگل اتخاذ میشود. در اینجا، پایداری به پایداری اکولوژیکی، اجتماعی، اقتصادی و محیطی اشاره دارد [ 4 ، 5]. این مطالعه به بررسی ادبیات GIS می پردازد که برای ارزیابی مدیریت کیفیت محیطی و آسیب برداشت چوب منتشر شده است. نتایج این بررسی ادبیات و دو مدل تجربی، دیدگاه مدیریتی مفیدی را در اختیار ذینفعان قرار میدهد تا مقایسه سیستمهای برداشت چوب مناسب برای مدیریت کیفیت تهیه چوب در موقعیتهای توسعه چالش برانگیز را تسهیل کند ( شکل 1 ).
در عمل، کیفیت پایین برداشت چوب را می توان با آسیب توده و آسیب خاک [ 6 ، 7 ] شناسایی کرد، که ویژگی های پایداری اصلی الزامات پایداری محیطی ذکر شده در بالا هستند، اما آنها نیز مسائل زیست محیطی و اقتصادی هستند. به حداقل رساندن خطرات مربوط به آسیب ساقه درخت و شیار شدن خاک در مناطق عملیات مکانیزه جنگل نیازمند برنامه ریزی به ترتیب اولویت زیر است: انتخاب ماشین آلات، زمان بندی فصلی برداشت چوب، رانندگی با ماشین ماهر و انتخاب مسیر برای حمل و نقل چوب گرد. برخی از محققان پیشنهاد کرده اند که اپراتورهای ماشین ممکن است این تصمیمات را بگیرند [ 8]. با این حال، برنامه ریزی باید قبل از برداشت چوب عملیاتی انجام شود، زیرا در عمل، اپراتور یک دروگر تنها انتخاب مسیرهای جزئی را برای فرستنده ها در طول عملیات چوب بری انجام می دهد. علاوه بر این، اپراتور فورواردر فقط تصمیم می گیرد که در یک جاده نواری آماده رانندگی کند یا نه. در تهیه چوب توسط صنعت جنگل فنلاند، مدیران و پیمانکاران مسئول برنامه ریزی برداشت چوب هستند.
برای دههها، سیستمهای برنامهریزی مبتنی بر GIS خانگی توسط صنعت جنگل توسعه یافتهاند و از مدیران در تصمیمگیری در مورد عملیات برداشت چوب حمایت میکنند [ 9 ، 10 ، 11 ، 12 ، 13 ، 14 ]. اخیراً، منابع داده عمومی GIS باز توسط محققان توسعه داده شده است و می توان آنها را در سیستم های برنامه ریزی ادغام کرد. آنها شامل شاخص نقشهبرداری عمق به آب خاک [ 15 ، 16 ، 17 ] و تجمعهای مختلف شاخصهای رطوبتی [ 7 ] است.]. علاوه بر این، منابع داده باز (به عنوان مثال، نقشه های خاک و مدل های زمین دیجیتال) و مدل های ظرفیت باربری خاک در این سیستم ها گنجانده شده است [ 18 ، 19 ]. تلاش های مالی قابل توجهی به این منظور انجام شده است و تاکنون پیشرفت های زیادی در حفظ محیط زیست و طبیعت جنگل حاصل شده است. از سوی دیگر، این منابع داده عمومی مبتنی بر GIS میتواند برای برنامهریزی برداشت چوب و کار عملیاتی در تهیه چوب توسط بخش صنعت جنگل سودمندتر باشد.
در حال حاضر، نقشههای رطوبت خاک برای هدایت برنامهریزی جنگل توسط مقامات استفاده میشود، اما پیشبینی دقیق و قوی شیارشدگی خاک ناشی از ماشینآلات برداشت برای مناطق معمولی جنگلی و توربزارها در دسترس نیست. این نقشه ها بر اساس داده های LiDAR هستند و برای محاسبه شاخص نقشه برداری عمق به آب (DTW) استفاده می شوند. مقادیر شاخص نشان دهنده نزدیکی فضایی به نزدیکترین خط جریان با تالاب فرضی یا مناطق برداشت چوب با زهکشی ناقص است. در این شرایط، شاخص حساسیت بالایی به شیار شدن خاک نشان می دهد. در مقابل، مقادیر شاخص متضاد، مناطق خشک و در نتیجه مناسب برداشت چوب را نشان می دهد.
در طول دهه گذشته، روشهای مبتنی بر دادههای پیشرفته در زمینههای علوم زمین و سنجش از دور برای طبقهبندی و تقسیمبندی مواد روی یا زیر سطح زمین توسعه یافتهاند. آنها در این فصل برای معرفی آخرین کار پیشرفته با استناد به مطالعات زیر مورد بحث قرار می گیرند [ 20 ، 21 ، 22 ]. پیشرفتهای اخیر در تکنیکهای یادگیری عمیق، راهحلهایی را برای دشواری طبقهبندی تکوجهی تحت سلطه با توسعه روشهای یادگیری عمیق چندوجهی ارائه میکند [ 20 ]. در سالهای اخیر، روشهای مختلف فاکتورسازی ماتریس غیرمنفی نیز برای حل این مشکل محاسباتی رایج شدهاند و به سطوح عملکرد امیدوارکنندهای دست یافتهاند [ 21 ].]. برای تأیید اثربخشی رویکردهای پیشنهادی، آزمایشهایی بر روی هر دو مجموعه داده ابرطیفی شبیهسازیشده و واقعی انجام شده است [ 22 ]. این آزمایشات تجربی با استفاده از تصاویر ابرطیفی شهری انجام شده است. به عنوان مثال، نتایج تجربی بر اساس مجموعه دادههای ISPRS 2D Potsdam و Vaihingen نشان میدهد که شبکه تقسیمبندی دقیق پیشنهادی بهتر از شبکههای مدال منفرد عمل میکند و نتایج تقسیمبندی بهتری را با پیچیدگی محاسباتی نسبتاً متوسط ارائه میدهد [ 21 ]]. جالب است که این تکنیکهای طبقهبندی و تقسیمبندی امیدوارکننده را در شرایط سختتر برداشت جنگل با تغییرات نامشخص در عناصر تصویر آزمایش کنیم. علاوه بر این، آزمایش ها باید به طور دقیق و قوی اجرا شوند تا طبقه بندی مفیدی در رابطه با معیارهای چالش برانگیز زیست محیطی مورد نیاز مقامات ارائه شود. اینها در بخش بعدی معرفی می شوند.
1.1. ماشین آلات برداشت برای برداشت چوب پیت لند زهکشی شده
در سطح جنگل ملی، از اسکن لیزری هوابرد برای جمع آوری اطلاعات برای محاسبه موجودی جنگل ها و تعیین تعادل زیست محیطی آنها استفاده می شود. بر اساس محاسبات، جنگلهای پیتلند حدود 25 درصد از کل ذخایر چوب و رشد فنلاند را تشکیل میدهند [ 23 ]. سهم مناطق زهکشی شده تورب 55 درصد است و این فقط در تولید الوار استفاده می شود. به این ترتیب میزان چوب قابل برداشت سالانه حدود 15 میلیون متر مکعب است که سهمی حدود 20 درصد از برداشت سالانه چوب را نشان می دهد. واضح است که مناطق پیتلند منبع مهمی از چوب تجدیدپذیر برای صنعت جنگل هستند. علاوه بر این، طبق محاسبات، سینک کربن جنگلهای پیت لند حدود 13 MtCO 2 eq است. (میلیون تن معادل دی اکسید کربن) [24 ]. از آنجایی که حدود 50 درصد چوب در سیستم ریشه قرار دارد، سینک کربن قسمت خشکی توده های تورب حدود 6 MtCO 2 برابر است که اگر بدون عملیات برداشت چوب فعال در اتمسفر رها شود، خطری است.
به نظر می رسد ماشین آلات مورد استفاده برای برداشت چوب پیتلند مشکل ساز باشد. این تعجب آور است زیرا چندین دهه پیش، ماشین آلات ویژه ای برای برداشت چوب در تابستان اختراع شد. اما مشکل اصلی مربوط به سودآوری عملیات برداشت است. به ندرت امکان استفاده از ماشین آلات ویژه برای عملیات برداشت چوب ذغال سنگ نارس هنگام استفاده از روش برش به طول (CTL) وجود دارد، زیرا دروگرها و فرواردرها گران هستند. معمولاً همین ماشینهای برداشت روی زمینهای پیتلند و معدنی کار میکنند ( شکل 2).). علاوه بر این، اغلب از همان ماشین آلات برای نازک کردن و قطع باز نهایی استفاده می شود. بنابراین استفاده از ماشین آلات خاص به صرفه نیست. در طول چهار سال گذشته، تقریباً 2100-2300 فرآورده برای عملیات برداشت چوب در فصل زمستان عملیاتی شده اند، اما در تابستان، برداشت تنها توسط حدود 1400-1700 فرآورده مدیریت می شود [ 25 ]. این تفاوت دلیل اصلی سودآوری کم برداشت چوب است، زیرا نرخ بهره برداری از ماشین آلات در تابستان به دلیل فصلی بودن برداشت چوب به طور قابل توجهی کاهش می یابد [ 26 ]. افزایش تعداد فورواردرهای ویژه به عنوان جایگزینی برای بهبود مدیریت کیفیت تهیه چوب غیرممکن است زیرا هزینه بالای ماشین آلات برداشت چوب، نرخ بهره برداری سالانه بالایی را ایجاب می کند.
چندین سیستم مانیتورینگ دروگر و حمل و نقل تک دسته برای برداشت چوب CTL استفاده شده است. یک جایگزین برای حمایت از نظارت بر کیفیت برداشت ماشینآلات شامل استفاده از تئوری پردازش تصویر است. به عنوان مثال، دروگرهای تک دسته ممکن است منجر به آسیب ساقه به درختان باقی مانده، در نتیجه کاهش رشد و کیفیت چوب درختان شود [ 6 ]. این امر نیاز به توسعه یک سیستم پشتیبانی تصمیم را برای نظارت بر آسیب ساقه ناشی از دروگرها تقویت می کند. برای بهبود سیستم پایش آسیب، کار توسعه می تواند بر روی اسکن لیزری زمینی یا فتوگرامتری چند نمای آسیب ساقه تمرکز کند [ 6 ، 27 ، 28 ، 29 ، 30 ، 31 .]. همچنین پیشنهاد شده است که از این تکنیک ها و روش ها برای نظارت بر کار برداشت چوب استفاده شود زیرا ظرفیت باربری پایین باعث شیار شدن خاک و آسیب درختان می شود. بر اساس بررسی انواع و مدلهای ماشینهای برداشت چوب موجود، تفاوتهای قابلتوجهی بین فشارهای اسمی زمین اعمال شده توسط ماشینهای فعلی و در نتیجه میزان شیارشدگی خاک ناشی از ماشینآلات وجود دارد [ 32 ، 33 ، 34 ، 35 ].]. توصیه میشود که از فورواردهای نور مجهز به حداقل هشت چرخ و عریضترین مسیرهای ممکن برای حمل و نقل چوب جنگلی استفاده شود. در همین مطالعات، هم ماشینهای دروگر مبتنی بر فناوری چرخدار و هم ماشینهای برداشت بر اساس بیلهای ردیابی برای استفاده به عنوان ماشینهای برش چوب در فصلهای پرچالش تابستان و پاییز برداشت چوب مناسب در نظر گرفته شدند.
ماشین آلات ردیابی برای زمینهای ذغال سنگ نارس مناسبتر از ماشینهای برداشت چوب چرخدار هستند زیرا فشار اسمی زمین ماشینهای ردیابی به طور مساوی به زمین تقسیم میشود [ 36 ]. اما اغلب ماشین آلات برداشت چوب چرخدار انتخاب می شود زیرا همانطور که گفته شد انتخاب ماشین آلات با سودآوری عملیات برداشت مرتبط است. بنابراین، استفاده از سیستمهای مسیر درست بر روی چرخها برای بهبود ظرفیت حمل بار مهم است. با این حال، معمولاً نمی توان از شیار شدن خاک جنگل به طور کامل اجتناب کرد. از این نظر، فوروارد 6 چرخ باعث ایجاد شیارهای عمیق تری در زمین نسبت به فورواردهای 8 و 10 چرخ می شود [ 32 ].
طبقه بندی فورواردها بر حسب سطوح مختلف فشار نامی زمین، اطلاعات برنامه ریزی مفیدی است [ 37 ]. در تئوری، اندازه بار فورواردر را می توان با محاسبه تاثیر بار بر روی جرم محور و فشار نامی زمین تعیین کرد. پالاندر و همکاران [ 33] بیان کرد که در عمل، توزیع وزن کمی از عقب بهتر از توزیع وزن از جلو است. با استفاده از توزیع وزن با بار عقب، اپراتور یک فورواردر می تواند بر تعادل بار فورواردر تأثیر بگذارد، به عنوان مثال، با بارگیری از جلو به گونه ای که شیارهای پیت لند ناشی از فورواردرها کاهش یابد. علاوه بر این، با استفاده از لودر چوب، اپراتور این پتانسیل را دارد که بر توزیع وزن چرخها و در نتیجه تشکیل شیارها در نواحی نرم کوچک درون زمینهای پیت لند تأثیر بگذارد.
طبقهبندی ظرفیت تحمل جایگاهها و ماشینآلات برای برنامهریزی برداشت چوب در زمینهای ذغال سنگ نارس موجود است [ 37 ]]. این را می توان برای برداشت چوب در تابستان و پاییز استفاده کرد تا با کاهش آسیب برداشت چوب، از خرید چوب سازگار با محیط زیست اطمینان حاصل شود. از همان مواد مطالعه، مدلهای علیت تجربی برای تخمین فرآیند شیار شدن خاک ناشی از ماشینآلات ترسیم شدهاند. با استفاده از این مدلها در سیستمهای برنامهریزی، طبقهبندی ظرفیت حمل مکانهای برداشت و ماشینآلات برداشت چوب، هم از مدیران و هم پیمانکاران در کار مدیریتی خود برای دستیابی به سطح برداشت چوب سازگار با محیط زیست پشتیبانی میکند. در نهایت، میتوان یک فرستنده مناسب را برای استفاده در زمینهای ذغال سنگ نارس در شرایط چالش برانگیز برداشت چوب انتخاب کرد. در این برنامه ریزی، مهمترین متغیرها، نوع ماشین آلات برداشت چوب، عمق تا سطح آب زیرزمینی، بارندگی در چهار هفته قبل،37 ]. این عوامل نیز متغیرهای مهم مدلهای GIS هستند که باید بهعنوان دادههای مکانی با عکاسی یا سیستمهای اسکن لیزری جمعآوری شوند.
اثرات آسیب درختان و شیار شدن خاک برای مالکان جنگل و تا حدی برای پیمانکاران اهمیت دارد [ 38 ، 39 ، 40 ]. با توجه به ظرفیت باربری پایین و شیار شدن خاک، سودآوری حمل و نقل چوب تحت تأثیر مصرف سوخت بالاتر و کاهش بهره وری است. بنابراین، برخی از مطالعات GIS تنها بر روی اندازه گیری این مشکلات با مدل سازی قابلیت تردد ماشین آلات تمرکز کرده اند [ 41 ]. این مفهوم به عنوان یک معیار برای ارزیابی قابلیت حرکت وسیله نقلیه در یک منطقه استفاده می شود. این بر اساس رابطه بین یک فورواردر و ویژگی های خاص منطقه ای است که فورواردر از طریق آن حرکت می کند [ 11 ].
اساساً شیار شدن خاک پیتلند به خواص خاک بستگی دارد. در رشته های علمی، یک مشکل جدی فقدان یک سیستم طبقه بندی خاک سازگار جهانی است. مشاهده شده است که تقریباً در هر کشوری، گروههای تحقیقاتی از نامگذاریهای متفاوتی استفاده میکنند. این امر باعث ایجاد مشکلاتی در هنگام بحث و انتشار نتایج علمی می شود. این امر به ویژه در میان زمین شناسان و افرادی که با مکانیک خاک کار می کنند رایج است. به همین دلیل، کارهای تحقیقاتی باید یک طبقه بندی و اصطلاحات جهانی را اتخاذ کنند، به عنوان مثال، سیستم طبقه بندی خاک فائو-یونسکو [ 42 ، 43 ، 44 ].]. با ساخت پایگاههای اطلاعاتی عمومی، عمومی و باز دانش خاک (به عنوان مثال، نقشه شاخص رطوبت خاک)، پارامترهای خاک میتوانند به طور موثر توسط رشتههای علمی جداگانه برای توسعه قابلیت تردد ماشینآلات برداشت چوب استفاده شوند.
1.2. اهداف مطالعه فعلی
با توجه به ادبیات، آسیب محیطی برداشت چوب در مناطق پیتلند معمولاً شامل آسیب درختان و شیار شدن خاک میشود. هیچ مشکلی در مورد قطع نهایی جنگل ها وجود ندارد، اما مهم است که بتوانیم پیش بینی کنیم که مکان برداشت چوب برای نازک شدن بدون ایجاد آسیب مناسب است. اندازه گیری های فضایی آسیب ساقه درخت و شیار شدن خاک (درصد و حداکثر عمق) به عنوان شاخص سطح قابل قبول آسیب استفاده می شود. با این حال، با توجه به هر دو معیار، مشخص نیست که چگونه اندازهگیریهای مکانی آسیب درختان و شیار شدن خاک باید انجام شود یا چه کسی از این اندازهگیریها استفاده خواهد کرد. آیا هدف از اندازه گیری های پیشنهادی برای سیستم های اطلاعات اداری یا سیستم های مدیریت تدارکات چوب استفاده می شود؟ در این مطالعه، استدلال می شود که GIS های مختلف باید برای اهداف مختلف در جنگلداری استفاده شوند. بنابراین، این مطالعه توجیهات برای نتیجهگیری در مورد استفاده پیشنهادی از برنامههای GIS شامل رادار نفوذی زمین، عکاسی، LiDAR هوابرد، پرتو گامای هوابرد، پرتو گامای زمینی و LiDAR زمینی را ارزیابی میکند. علاوه بر سیستم های برنامه ریزی مقامات، این مطالعه بررسی می کند که چگونه GIS کارآمد می تواند مناطق برداشت را برای برداشت چوب برای تهیه چوب توسط صنعت جنگل انتخاب کند، که سهم منحصر به فرد این نشریه در ادبیات است. این تحقیق از دیدگاه سیستم های مدیریت کیفیت انجام شده است. عکاسی، LiDAR هوابرد، پرتو گامای هوابرد، پرتو گامای زمینی و LiDAR زمینی. علاوه بر سیستم های برنامه ریزی مقامات، این مطالعه بررسی می کند که چگونه GIS کارآمد می تواند مناطق برداشت را برای برداشت چوب برای تهیه چوب توسط صنعت جنگل انتخاب کند، که سهم منحصر به فرد این نشریه در ادبیات است. این تحقیق از دیدگاه سیستم های مدیریت کیفیت انجام شده است. عکاسی، LiDAR هوابرد، پرتو گامای هوابرد، پرتو گامای زمینی و LiDAR زمینی. علاوه بر سیستمهای برنامهریزی مقامات، این مطالعه بررسی میکند که چگونه GIS کارآمد میتواند مناطق برداشت را برای برداشت چوب برای تهیه چوب توسط صنعت جنگل انتخاب کند، که سهم منحصر به فرد این نشریه در ادبیات است. این تحقیق از دیدگاه سیستم های مدیریت کیفیت انجام شده است.
2. چارچوب برنامه های کاربردی GIS نوآورانه: بررسی ادبیات
مدیران تدارکات چوب به یک سیستم مدیریت کیفیت برای برنامه ریزی، نظارت و کنترل معیارهای پایداری برداشت چوب در سطح جنگل نیاز دارند [ 5 ]. سیستمهای اطلاعات جغرافیایی و طبقهبندی ظرفیت حمل نیز در حال حاضر برای مناطق کوچک، به عنوان مثال، در سطح پایه موجود است و میتوانند برای در نظر گرفتن معیارهای کیفیت قبل از برداشت چوب استفاده شوند. اگرچه روشهای طبقهبندی تصویر یا نقشهبرداری از راه دور، مانند مشاهده زمین و تجزیه و تحلیل ترکیب خاک، اهمیت فزایندهای در برنامهریزی جنگل پیدا میکنند، اما همه آنها به طراحی طبقهبندیکنندههای کارآمد و محصولات طبقهبندی بستگی دارند [ 44 ].]. با این حال، یک سیستم مدیریت دیجیتال برای کنترل کیفیت آسیب درختان و خاک پس از برداشت هنوز در دسترس نیست.
در سطح سیستم ماشین آلات، امکان استفاده از نظارت خودکار و جمع آوری داده ها، به عنوان مثال، در حین عملیات فورواردر وجود دارد. بنابراین، پیشنهاد میشود که آنها میتوانند بهعنوان نوعی از اطلاعات فضایی مورد نیاز مدیران هم برای کنترل کار واقعی و هم برای برنامهریزی برداشت چوب در آینده عمل کنند [ 6 ، 8 ]. با این حال، استفاده از اندازهگیریهای عملیاتی برای کنترل اداری در مورد آسیب درختان و آسیبهای ناشی از شیار شدن خاک، کار بزرگی است که به سختی ارزش انجام آن را ندارد، زیرا با استفاده از دوربین عکاسی در کابین حملکننده و بررسی دستی، آسیب را میتوان به راحتی و مقرون به صرفه کنترل کرد. کنترل اداری در صورت نیاز [ 6 ، 28 ].
به عنوان یک ابزار GIS، در نظر گرفتن رادار نفوذ به زمین به عنوان یک امکان جمع آوری داده برای استفاده در سیستم های برنامه ریزی مهم است. این یک تکنیک سنجش است که در آن زمان سفر دو طرفه یک پالس انرژی فرکانس بالا که از سطح مشترک بین پیت و لایههای زمین زیرین منعکس میشود اندازهگیری میشود [ 45 ]. در عمل، این روش اندازهگیریهای فضایی ضخامت ذغال سنگ نارس را در یک منطقه پیتلند تولید میکند. 46 ، 47 ، 48 ]. سپس یک سری از اندازه گیری ها را می توان به راحتی درون یابی کرد تا یک نقشه عمق پیت تهیه شود. با این حال، اندازهگیریهای رادار نفوذی به زمین، به ویژه هنگام نقشهبرداری از عمق پیت در یک منطقه جنگلی بزرگ، کار فشرده هستند [ 49 ].
2.1. سیستم های برنامه ریزی برداشت چوب
اندازهگیری دستی عمق پیت و اندازهگیری رادار نفوذی زمین توسط ابزارهای مختلف قابل انجام است. محاسبه دستی عمق ذغال سنگ نارس می تواند با داده های رادار نفوذی به زمین جایگزین شود، که می تواند برای محاسبه و مدل سازی اطلاعات عمق پیت برای سیستم های برنامه ریزی برداشت چوب برای تهیه چوب استفاده شود. روشهای اندازهگیری از خطوط جمعآوری دادهها با فاصله 10 متر بین نقاط نفوذ در مناطقی به وسعت صدها کیلومتر مربع در مطالعات پیتلند استفاده میکنند. 50 ]. در مقایسه با سایر روشهای اندازهگیری عمق پیت، روش رادار نفوذی زمین به دلیل دقت بالا، کارایی هزینه و حداقل نیاز به تجهیزات، متداولترین روش اندازهگیری است [ 50 ، 51 ، 52 ].]. اگرچه این روش دقیقترین روش برای جمعآوری دادههای برنامهریزی تهیه چوب است، اما استفاده از آن هم قبل از ورود به سیستم و هم برای سیستمهای مدیریت کیفیت برداشت چوب پس از آن بسیار گران است.
در جمع آوری داده های اسکن لیزری، پالس های لیزر به سمت یک جسم (به عنوان مثال، ساقه درخت یا سطح زمین) فرستاده می شوند [ 53]. هنگامی که آنها به سمت زمین فرستاده می شوند، نبض ها ممکن است به زمین، زیر درختان، بالای درختان ایستاده یا شاخه های درختان برخورد کنند. پالس منعکس شده را می توان برای تعیین محل آیتم دریافت کننده پالس استفاده کرد و ارتفاع اسکنر را می توان بر اساس اطلاعات مکان و مدت زمانی که پالس لیزر برای حرکت به آن صرف می کند تعیین کرد. اسکنر همچنین قدرت پالس برگشتی را اندازه گیری می کند. از این نظر، مقدار پالس بر اساس مجموعه ای از آیتم ها در ناحیه مشخص شده است که نشان دهنده پالس لیزر به جای یک آیتم جداگانه است. مختصات تک تک پالس های لیزر را می توان به سیستم مختصات زمینی و یافته های ارتفاع تبدیل کرد. با استفاده از ابرهای نقطه ای به دست آمده از پردازش بازتاب ها و/یا از پژواک، می توان مدل های سطح پیوسته را تشکیل داد.31 ]. در تئوری، تفاوت بین زمین جنگلی و کف شیار خاک را می توان از مدل ها محاسبه کرد. از سوی دیگر، Hyyppä و همکاران. [ 54 ] گزارش داد که مقادیر مدل ارتفاع درخت معمولاً دست کم گرفته می شود زیرا پالس لیزر ممکن است همیشه به بالای درخت برخورد نکند.
چندین مطالعه GIS سیستم های برنامه ریزی برداشت چوب را بر اساس داده های باز توصیه می کنند [ 18 ، 29 ، 55 ، 56 ]. حسگر هوابرد LiDAR به عنوان جایگزینی برای جمعآوری دادههای پیتلند برای سیستمهای برنامهریزی در محیط جنگل، به عنوان مثال، برای نیازهای مقامات در سطوح جنگل و توده استفاده شده است. دادههای ارتفاعی مشتقشده از LiDAR نیز برای استفاده در مدلسازی عمق پیت و نقشهبرداری قابلیت تردد ماشینآلات جنگل آزمایش شدهاند [ 17 ، 57 ، 58 ]]. برای توصیف توپوگرافی، شیب، شاخص رطوبت و فواصل تا عناصر آب (خندق، رودخانه) از مدل رقومی ارتفاع استفاده شد. تلاشها برای مدلسازی استاتیک عمق پیت با استفاده از دادههای سنجش از دور مانند ارتفاع و شیب، امیدوارکننده بوده است [ 15 ]، اما لازم است فرض کنیم که یک رابطه عملکردی دینامیکی پیشینی بین انباشته تدریجی (در یک دوره زمانی طولانی) وجود دارد. عمق ذغال سنگ نارس و شرایط برداشت فعلی [ 59 ]. بنابراین، میتوان نتیجه گرفت که مدلسازی دینامیک عمق پیت با دقت کافی بر اساس دادههای تولید شده توسط LiDAR موجود در هوا غیرممکن است. بر این اساس، این روش برای جمعآوری دادههای برنامهریزی تهیه چوب هم قبل و هم بعد از استفاده از سیستمهای مدیریت کیفیت برداشت به اندازه کافی دقیق نیست.
برخی از مطالعات اخیر نشان میدهند که استفاده ترکیبی از دادههای پرتو گامای هوابرد و دادههای LiDAR موجود در هوا، ابزاری عملی برای تخمین عمق پیت بدون دانش پیشینی که توسط اندازهگیریهای دستی جمعآوری شده است، فراهم میکند [ 6 ، 59 ، 60 ]. گاتیس و همکاران [ 59 ] متغیرهای مشتق شده از LiDAR را بررسی کرد که بر تجمع ذغال سنگ نارس (ارتفاع، شیب، رطوبت توپوگرافی) تأثیر میگذارند. علاوه بر این، آنها به این نتیجه رسیدند که داده های طیف سنجی اشعه گاما با وقوع پیت همبستگی دارد. بر اساس این دانش و دانش قبلی، گاتیس و همکاران. [ 59 ] متغیرهای مشتق شده از LiDAR را با داده های بررسی طیف سنجی اشعه گاما ترکیب کرد تا بررسی کند که آیا دو فناوری می توانند به طور مؤثرتری برای توسعه یک مدل عمق پیت پویا استفاده شوند یا خیر. آزمایشها موفقیتآمیز بودند و نشان داده شد که این مدلها میتوانند در سیستمهای برنامهریزی تهیه چوب قبل از برداشت چوب مورد استفاده قرار گیرند، که مدیریت مناطق بزرگ توربزار را در سطح جنگل تسهیل میکند.
تمام خاک های معدنی، به درجات مختلف، رادیواکتیو هستند. به همین دلیل است که ایزوتوپ های رادیواکتیو خاک معدنی تابش الکترومغناطیسی موج کوتاه از زمین ساطع می کنند. اندازهگیریهای مغناطیسی، الکترونیکی و رادیومتریک توسط نقشهبرداری هوا-ژئوفیزیک تولید میشوند. این پروازهای نقشه برداری خاک به طور سیستماتیک از ابتدای دهه 1970 در ارتفاع پروازی بین 30 تا 50 متر و فاصله خط پروازی 200 متر انجام شده است. این عناصر از مواد تشعشع گامای طبیعی بر روی یک شطرنجی 50 × 50 متر درونیابی شدند [ 61 ]]. از ابزارهای هوابرد و زمینی می توان برای اندازه گیری تشعشع در خاک های معدنی استفاده کرد تا از ضخامت لایه ذغال سنگ نارس استفاده کرد و مناطق تالاب را شناسایی کرد زیرا شار تابش اشعه گاما، به ویژه از پتاسیم و توریم، زمانی که رطوبت خاک کاهش می یابد، کاهش می یابد. محتوا افزایش می یابد [ 62 ، 63 ، 64 ، 65 ]. محتوای آب ذغال سنگ نارس به طور متوسط 90٪ است. به همین دلیل است که اگر ضخامت لایه ذغال سنگ نارس بیش از 0.6 متر باشد، تشخیص پرتوهای گاما در زمین های ذغال سنگ نارس با سطوح رطوبت طبیعی غیرممکن است [ 63 ]. این رابطه برای ارائه تخمین های مرطوب و شاخص سایت پیتلندها استفاده شده است. اخیراً، Pohjankukka و همکاران. [ 56] دریافت که انواع خاک های ماسه ای و پیت اسفاگنوم را می توان به خوبی از داده های اشعه گاما تشخیص داد. آنها با استفاده از این اطلاعات، انواع خاک های موجود را پیش بینی کردند.
با توجه به توسعه سیستم های برنامه ریزی، استفاده از LiDAR زمینی برای تولید داده های شیارهای زمین آزمایش شده است، به عنوان مثال، با استفاده از داده های برداشت کننده برای نیازهای مقامات در سطح جنگل و توده [ 8 ]. اگرچه تکنیک های استانداردی برای فناوری لیزر برای شناسایی اشیاء ایجاد شده است، جداسازی اشیا و پس زمینه های فردی از محیط های جنگلی مشکلاتی را ایجاد می کند که هنوز به طور رضایت بخشی حل نشده اند و چالش اصلی در سیستم های برنامه ریزی هستند [ 66 ، 67 ]. بر اساس نتایج یک مطالعه میدانی تجربی، یک حسگر LiDAR روی ماشین جنگلی میتواند برای جمعآوری دادههای عمق شیارها با وضوح فضایی 10 تا 20 متر با پردازش دقیق دادههای ابر نقطه خام استفاده شود [ 67 ]]. مطالعات نشان دادهاند که دادههای مکانی تولید شده میتواند برای توسعه نقشههای ترددپذیری جنگل در سراسر کشور از برداشت چوب برای مدیریت استفاده شود [ 68 ]. با این حال، این اطلاعات مکانی برای استفاده در تعیین قابلیت تردد ماشین آلات جنگلی در شرایط برداشت چوب فنلاند به اندازه کافی دقیق نیست، اگرچه مطالعه قبلی نشان داد که میانگین ریشه میانگین مربعات خطا (RMSE) سایت های آزمایش برای LiDAR در مقایسه با اندازه گیری های دستی 3.5 متر بود. 8]. علاوه بر این، با توجه به توپوگرافی سطح و پوشش گیاهی، محاسبه سطح زمین تحتتاثیر عدم قطعیتهای ناشی از بازتابهای سایر اجسام در دادههای عمق شیار قرار میگیرد. علاوه بر این، سنگها و کندههای بین چرخها باعث ایجاد نقاط پرت در دادههای عمق شیارهای اندازهگیری شده با LiDAR میشوند. به دلیل این اختلالات رایج، اعماق شیارها را می توان در چندین مکان کمتر یا بیش از حد تخمین زد. علاوه بر این، باید به خاطر داشت که دادههای قدیمی برای سیستمهای برنامهریزی تهیه چوب بیفایده هستند، زیرا تصمیمات باید درست قبل از انتقال ماشینآلات به محل برداشت چوب گرفته شود.
2.2. سیستم نظارت و کنترل
چندین بخش از تحقیقات گزارش کرده اند که LiDAR زمینی می تواند برای تقسیم بندی تک درختان و تشخیص آسیب درختان از داده های مکانی استفاده شود [ 69 ، 70 ]. با این حال، تشخیص آسیب ساقه یک کار چالش برانگیز است [ 71 ، 72 ]. بنابراین، با توجه به توسعه شاخصهای کنترل خسارت درختان، استفاده از ابزارهای عکاسی به جای ابزارهای لیزری برای نظارت و کنترل آسیب در برداشت چوب پیتلند مقرون به صرفهتر است [ 66 ].]. علاوه بر این، به نظر میرسد که پیمانکاران نیازی به استفاده از LiDAR زمینی در برنامهریزی عملیاتی برداشت چوب ندارند و بدون حمایت مالی عمومی برای سرمایهگذاری در یک حسگر خودکار بلادرنگ، تولید دادههای کاربردی برای مقامات برای مدلسازی پیشبینیهای ترددپذیری جنگل غیرممکن است. دستگاه.
بر این اساس، به عنوان یک مزیت LiDAR زمینی و عکاسی ارائه شده است که جمعآوری دادههای بلادرنگ توسط ماشینهای جنگلداری در طول برداشت چوب میتواند برای سیستمهای کیفیت برداشت چوب مفید باشد [ 68 ، 71 ]. با این حال، بدون سیستم های محاسباتی اضافی، داده های بلادرنگ بی فایده هستند [ 72 ]. در حال حاضر، از روشهای یادگیری ماشینی برای تولید نقشههای peatland استفاده میشود، زیرا میتوانند دادههای طبقهبندی را با ویژگیهای ابعاد بزرگ شناسایی کنند. مطالعات قبلی نشان می دهد که پتانسیل زیادی برای تولید برنامه های کاربردی کامپیوتری برای سیستم های کیفیت وجود دارد [ 6 , 68 , 73]. با این حال، این کاربردها به روشهای محاسباتی بسیار پیچیده نیاز دارند و بنابراین برای اهداف برداشت چوب بسیار گران هستند. علاوه بر این، در یادگیری ماشین، توسعهدهندگان اغلب فرض میکنند که اجزای داده خام هنگام ارزیابی عملکرد مدل مستقل هستند. با این حال، این به ندرت در عمل صادق است. بنابراین، روش یادگیری ماشین برای کنترل کیفیت پس از برداشت چوب در سیستم های اطلاعات تهیه چوب مناسب نیست. دادهها در شرایط عدم قطعیت طبیعی جمعآوری میشوند که باعث تغییرات زیادی در شرایط برداشت چوب میشود، اما اندازهگیری کیفیت باید با دقت بالا و کارایی هزینه انجام شود. اخیراً، نتایج تجربی نشان دادهاند که ساختارهای یادگیری ماشین پیشنهادی جدید ممکن است راهحلهای بخشبندی امیدوارکنندهتری را ارائه دهند [ 20 ، 21 ]، 22 ]. با این حال، نتایج بر اساس مجموعه دادههای تجربی بدون در نظر گرفتن تغییرات طبیعی فوقالعاده در زمینهای پیت در طول کار با ماشین واقعی است.
پیشنهاد میشود که کنترل کیفیت پس از برداشت عمق شیارها دادههای LiDAR گسترده مکانی و زمانی را برای توسعه مدلهای قابلیت تردد جنگل برای حمل و نقل چوب فراهم کند [ 8 ]. اگر این اتفاق بیفتد، همچنین لازم است الزامات روشهای محاسباتی پیچیده، مانند روشهای ارائه شده توسط Pohjankukka و همکاران، در نظر گرفته شود. [ 72]. این مشکل همبستگی خودکار اطلاعات مکانی را کنترل می کند. مجموعه دادههای GIS نمونهای از نقاط دادهای هستند که هر چه از نظر جغرافیایی به یکدیگر نزدیکتر باشند، وابستگی قویتری به یکدیگر دارند. این پدیده به عنوان خودهمبستگی فضایی شناخته می شود. در این شرایط، روشهای اعتبارسنجی متقاطع استاندارد نتایجی بسیار خوشبینانه تولید میکنند، به عنوان مثال، تخمینهای پیشبینی مغرضانه برای مدلهای فضایی، که منجر به افزایش هزینهها و آسیب کاری در عمل میشود. پوهجانکوکا و همکاران [ 72 ] یک روش اعتبار سنجی متقاطع k-fold فضایی برای غلبه بر مشکلات داده مرتبط با LiDAR زمینی پیشنهاد کرد. با این حال، همانطور که در بالا ذکر شد، این روش در شرایط ایدهآل برداشت از جنگل تجربی توسعه و آزمایش شد.
در تئوری، هر دو مشکل کیفیت برداشت چوب مربوط به آسیب اشیاء نظارت شده (آسیب ساقه درخت و شیار شدن خاک) باید با استفاده از تکنیک دوربین استریو در فورواردها که پس از استفاده از دروگرها در جنگل کار می کنند، به طور موثر حل شوند. بنابراین، مهم است که چگونه معرفی کنیم که چگونه دوربین زمینی نصب شده در کابین حمل و نقل میتواند عکسهای عملیاتی دیجیتال و اطلاعات آسیبهای فضایی مورد نیاز را ارائه دهد، تحقیق کنیم. مطالعات اخیر مرتبط با جنگلداری نشان داده است که فتوگرامتری چند نمای و پردازش تصویر را می توان به صورت عملیاتی اجرا کرد، زیرا آنها جایگزین های مقرون به صرفه تری برای سیستم های اسکن لیزری هستند [ 27 ، 28 ، 29 ، 30 ، 74 ،75 ، 76 ، 77 ]. به طور خاص، ماهیت منابع فشرده سیستمهای نظارتی مبتنی بر LiDAR زمینی فعلی نگرانکننده است [ 28 ، 30 ، 78 ]. مارا و همکاران [ 77 ] بعد از افزایش تعداد پاس های فوروارد، ابعاد شیارهای خاک و فشردگی خاک را به صورت فتوگرامتری تخمین زد. آنها گزارش کردند که مشکل فتوگرامتری انعکاس اشیا (علف، بقایای چوب و آب) است که در برخی موارد بر دقت روش تأثیر می گذارد. بخش قبل مشکلات مربوط به LiDAR زمینی را ذکر کرد که به نظر می رسد در شرایط برداشت چوب عملی در زمین های ذغال سنگ نارس با توجه به برنامه ریزی و کنترل عملیاتی جدی تر باشد.
به گفته Salmivaara و همکاران. [ 8]، نصب حسگر زمینی LiDAR بر روی یک وسیله نقلیه جنگلی عملیاتی یک ابزار مقرون به صرفه برای انجام جمعآوری گسترده دادههای عمق شیار به عنوان بخشی از عملیات جنگلداری عادی است. با این حال، آنها هیچ داده هزینه را تجزیه و تحلیل نکردند. علاوه بر این، آزمایش میدانی آنها در اواسط ماه مه در فصل برداشت چوب انجام شد که شرایط آزمایشگاهی ایدهآلی را برای جمعآوری دادههای LiDAR زمینی فراهم کرد. در عمل، نازک شدن جنگلهای پیتلند در طول تابستان و پاییز اتفاق میافتد، زمانی که شرایط برداشت چوب برای حسگرهای LiDAR با توجه به میزان پوشش گیاهی روی زمین مشکلسازتر است. علاوه بر این، نویسندگان به این نتیجه رسیدند که روش LiDAR در سراسر محدوده ملی شرایط جنگل قابل استفاده است. اگرچه استفاده از آن پس از جمعآوری به موقع دادهها در تابستان و پاییز هنوز مورد بررسی و توجیه قرار نگرفته است که پیشنیاز جمعآوری گسترده دادههای ملی است. تا به امروز، نتایج فقط برای خاک آزمایشی ایده آل و ویژگی های توپوگرافی سطحی و پوشش گیاهی قوی هستند. از آنجایی که تغییرات دادهها در اندازهگیریهای LiDAR در شرایط برداشت واقعی متفاوت (بزرگتر) خواهد بود، نتیجهگیریهای قوی از مطالعات موردی تجربی باید قبل از تعمیم به دقت در نظر گرفته شوند. قبل از اینکه نتایج ارائه شده فعلی در مورد توانایی LiDAR زمینی برای تولید اطلاعات مکانی توجیه شود، باید تحقیقات بیشتری انجام شود. هنگام برداشت چوب در تابستان یا پاییز،
2.3. سنتز ادبیات برای سیستم مدیریت کیفیت
چندین GIS برای توسعه سیستم های نظارت و کنترل آسیب موجود است. آنها به دقت در رابطه با توسعه یک سیستم مدیریت کیفیت برای تهیه چوب تأیید شده اند. به طور فرضی، از نظر تشخیص آسیب، یک سیستم مانیتورینگ خودکار مبتنی بر پردازش تصویر عکسبرداری یا اسکن لیزری میتواند پشتیبانی تصمیمگیری را برای ذینفعان فراهم کند در حالی که عوامل مرتبط با کیفیت خرید چوب پایدار را در طول عملیات چوببرداری روزانه در نظر میگیرد. با این حال، همانطور که در بالا توضیح داده شد، سیستم های برنامه ریزی روزانه برای مدیران تدارکات چوب مهم تر از مقامات هستند. در نهایت، آنها باید از نظر فضایی بر اساس ارزیابیهای علّی و پیامد شرایط گزارششده برداشت چوب و خطرات آسیب باشد. ترکیب مشاهدات یک مرور ادبیات با استفاده از نمودار جریان اطلاعات هنگام طراحی سیستم های مدیریت کیفیت همیشه مفید است. بنابراین، به عنوان ساختار اساسی سیستم مدیریت، سه پایگاه داده مجزا برای ذینفعان در نظر گرفته شد.شکل 1 ). این پایگاه های داده در حال حاضر در عمل در دسترس هستند. بر اساس آنها، شکل 3 فلوچارتی از نیازهای اطلاعات مکانی برای یک سیستم مدیریت کیفیت خرید چوب مبتنی بر GIS را ارائه می دهد. با توجه به این ساختار پیشنهادی، تحقیقات آینده مطمئناً کارایی سیستمهای فتوگرامتری و اسکن لیزری را برای توسعه برنامهریزی برداشت چوب و سیستمهای مدیریت کیفیت به ترتیب از نظر دقت و هزینه مقایسه خواهند کرد.
در حال حاضر نقشه خاک پایه با مقیاس 1:20000 برای فنلاند وجود دارد. داده های GIS باز شامل یک مدل ارتفاعی دیجیتال است که در سراسر کشور برای شرکت های تهیه چوب در دسترس است [ 79 ]. علاوه بر یک شبکه 10 متری، یک شبکه DEM شبکه 2 متری مبتنی بر اسکن لیزری هوابرد برای اکثر نقاط کشور موجود است. علاوه بر این، کل کشور توسط یک نقشه خاک کلی در مقیاس 1:200000 [ 80 ] پوشانده شده است. الگوهای عددی نوع خاک (≥6.25 هکتار) برای این نقشه با مرتبط کردن خواص و کیفیت دادهها، عمدتاً با تفسیر، ویرایش و استفاده از مجموعه دادههای GIS ژئوفیزیکی موجود و تکنیکهای پردازش تصویر، تولید شدهاند.
بهبودهای قابل توجهی در نقشه برداری باز عمومی جنگل ها و مناطق تورب کوهی نیز انجام شده است که از توسعه سیستم های برنامه ریزی برداشت چوب حمایت می کند. در نقشه، خاک ها را می توان هم برای خاک سطحی و هم برای لایه های زمینی نمایش داد. علاوه بر این، یک پایگاه داده توپوگرافی برای مناطق مرزی استفاده می شود و از داده های ژئوفیزیکی برای تعیین ضخامت لایه پیت استفاده می شود. به عنوان مثال، شاخص مرطوب تورب زمین از یک شبکه 16 متری [ 8 ] استفاده می کند که شامل داده های نقشه برداری هوا-ژئوفیزیک و یک پایگاه داده توپوگرافی به شکل برداری است که شامل عناصر مهم نقشه و اجزای داده مانند نقاط کوچک و مرطوب تورب زمین ها است.
3. مواد مورد استفاده برای مدل سازی شاخص های کیفیت برداشت چوب
شکل 3 آسیب ساقه درخت و شیار شدن خاک را به عنوان شاخص های مرتبط با کیفیت برداشت چوب نشان می دهد، و اینها نیز عوامل مرتبط با کیفیت مرتبط با تهیه چوب پایدار از نظر زیست محیطی در طول عملیات روزانه هستند. آنها را می توان به طور مستقیم در زمان واقعی از فرواردر به عنوان مرحله نهایی عملیات اندازه گیری کرد. در مرحله بعد، دو تحلیل تجربی برای توصیف متغیرهای توضیحی مرتبط با این شاخصها که بر موفقیت اندازهگیری آسیب ساقه درخت و شیار شدن خاک تأثیر میگذارند، استفاده شد.
3.1. اندازه گیری پایش آسیب درخت
دادهها در مورد کیفیت و شرایط برداشت چوب از سایتهای چالش برانگیز برداشت چوب – جنگلهای خصوصی واقع در مناطق کارلیای جنوبی، کارلیای شمالی، ساوونیای جنوبی، ساوونیای شمالی و استروبوتنیا شمالی در فنلاند جمعآوری شد. در طول کار جنگلی، محل شیارهای خاک و آسیب درختان و مختصات هر قطعه مطالعه با استفاده از دستگاه جی پی اس Trimble GeoExplorer 2005 ذخیره شد. سپس این اطلاعات در برنامه ArcMap 10 ذخیره شد. مکانهای مجموعه دادههای فضایی توسط “مقادیر استخراج” برای تشکیل پایگاه داده طرح مطالعه انتخاب شدند، که مشاهدات از آن به Microsoft Office Excel صادر شد. مشاهدات کیفیت برداشت چوب جمعآوریشده از قطعات مطالعه نیز در Microsoft Office Excel ذخیره شد. تجزیه و تحلیلهای آماری با استفاده از آمار SPSS 20.0 انجام شد.
عکاسی در پاییز انجام شد. سپس دادههای مکانی آسیب واقعی ساقه پس از ورود به سیستم جمعآوری شد. اطلاعات پس زمینه دروگرهای تک دستگیره و قطعات نمونه در جدول 1 توضیح داده شده است. تعداد کل مشاهدات آسیب ساقه 558 در پانزده غرفه برداشت چوب بود ( جدول 2). تمام مشاهدات از یک جهت عکس گرفته شده است. میانگین فاصله بین یک نقطه عکاسی و ساقه آسیب دیده 6.4 متر بود. آسیب ساقه با دوربین دیجیتال تک لنز رفلکس Canon EOS 60D عکسبرداری شده است. فاصله کانونی لنز دوربین 18 میلی متر تعیین شد. دوربین به سه پایه متصل شد تا پایداری آن به حداکثر برسد. تصاویر با فرمت JPEG ضبط شدند. تصاویر 5184 پیکسل در عرض و 3456 پیکسل در ارتفاع بودند. نمایه رنگ تصویر استاندارد آبی قرمز سبز (RGB) و عمق بیت 24 بود.
3.2. اندازه گیری پایش شیارهای خاک
داده های ماشین برداشت چوب از پیمانکاران جمع آوری شد. سه علامت تجاری مختلف دروگر و شش علامت تجاری حمل و نقل در پیتلندها استفاده شد ( جدول 3 ). به عنوان داده های اولیه در مورد شرایط برداشت، حجم درخت و حذف درخت در هکتار از کرت های مورد مطالعه اندازه گیری شد. علاوه بر این، میانگین فاصله حمل و نقل جنگلی و فواصل بین گودال های پیت لند بر اساس نقشه هر توده محاسبه شد. عمق جدول آب زیرزمینی با حفر یک گودال نزدیک به هر نقطه جمع آوری داده ها اندازه گیری شد. محل حفاری عمیق ترین نقطه در طرح بود. ضخامت لایه پیت توسط نمونه پیت در وسط کرت های مورد مطالعه اندازه گیری شد.
یک نقشه کلی خاک (1:200000) برای تمام 240 قطعه مطالعه موجود بود. برای تعیین مکان داده ها، یک شبکه نقطه سیستماتیک (50×50 متر) توسط برنامه ArcGIS ایجاد شد. نقاط جمعآوری دادهها در کرتهای مطالعه ایجاد شد و فاصله هر نقطه تا مرکز نزدیکترین جاده نواری ماشینها اندازهگیری شد. شطرنجی (25×25 متر) در 144 قطعه نمونه مورد مطالعه استفاده شد. اگر مواد شطرنجی (2×2 متر) در سایتهای برداشت چوب در دسترس نباشد، برای محاسبه عمق سطح آب زیرزمینی و تغییر در مدل ارتفاع سطح زمین استفاده شد. علاوه بر این، 179 قطعه مطالعه شامل یک رستر پتاسیم (25×25 متر) بود که برای به دست آوردن اطلاعات پرتو گاما ایجاد شد.
از وسط قطعه مورد مطالعه، شش متر در جاده نواری پیشروی جنگلی در هر دو جهت اندازه گیری شد. طول شیارهای خاک از این قسمت از جاده (یعنی 12 متر) تعیین شد. درصد جاده آسیب دیده از طول شیارهای خاک بر اساس مقررات برداشت چوب که توسط مقامات تهیه شده است محاسبه شد. اگر خاک بیش از 10 سانتیمتر عمق، بیش از 50 سانتیمتر طول داشته باشد و در جادههای نواری توسعهیافته برای حمل و نقل جنگل قرار داشته باشد، این آسیب به عنوان شیار شدن خاک تفسیر میشود. علاوه بر این، عمیق ترین نقطه شیار (یعنی حداکثر عمق شیار) در مسیر چرخ هر جاده اندازه گیری شد و میانگین عمق شیار هر توده جنگلی محاسبه شد.
میانگین درصد شیارشدگی خاک در کل طول راه 12.2 درصد (انحراف معیار، 23.3 درصد) بود. حداکثر عمق شیارها به طور متوسط 10.8 سانتی متر و میانگین عمق شیارهای همه مسیرهای نواری 3.8 سانتی متر بود. بیشترین درصد شیارشدگی خاک یک توده 56.3 درصد بود. به همین ترتیب، حداکثر عمق شیار 11.2 سانتی متر و میانگین عمق شیارهای مسیرهای راه نواری 5.2 سانتی متر بود.
مدل ارتفاع درخت (2×2 متر) با پالس های لیزری در 96 قطعه مورد مطالعه ایجاد شد. علاوه بر این، یک مدل ارتفاع (25×25 متر) از منحنی های ارتفاع توپوگرافی محاسبه شد. علاوه بر آن مدل (2 × 2 متر)، مدل دیگری (6 × 6 متر) برای انعکاس پالس از پوشش گیاهی (> 2 متر) استفاده شد. دقت اطلاعات ارتفاع تقریباً 30 سانتی متر بود. داده های مطالعه نیز شامل 85 قطعه مطالعه بود و اطلاعات جمع آوری شده شامل تعداد درختان، تراکم درختان در توده، سطح پایه درختان در توده و گونه های درختی موجود بود.
4. روش های استفاده شده توسط مدل های با کیفیت برداشت چوب
داده ها در سه مرحله تجزیه و تحلیل شدند. ابتدا، تجزیه و تحلیل تجربی عوامل مرتبط با آسیب درختان و شیار شدن خاک در طول برداشت چوب را بررسی کرد. ثانیاً، ما بررسی کردیم که آیا امکان مدلسازی شاخصهای کیفیت از طریق تحلیل رگرسیون وجود دارد یا خیر. ثالثاً، ما بررسی کردیم که آیا جمعآوری اطلاعات مکانی در مورد معیارهای کیفیت به طور مؤثر بدون اندازهگیری دستی امکانپذیر است یا خیر. با استفاده از عوامل اکتشافی، مدلهای رگرسیون برای انتخاب مکانهای برداشت برای پیشبرد تهیه چوب پایدار از نظر زیستمحیطی، تهیه و ارزیابی شدند. مدل سازی اطلاعات درک ما را در مورد توانایی پیش بینی یک شاخص زمانی که به عنوان یک معیار کیفیت استفاده می شود افزایش می دهد.
تجزیه و تحلیل رگرسیون لجستیک برای مدل سازی روابط بین تشخیص آسیب ساقه موفق، شرایط برداشت چوب و تکنیک پردازش تصویر استفاده شد [ 6 ]. در اینجا، فرض بر این بود که این مدل به عنوان یک ابزار برنامه ریزی دیجیتال برای حمایت از تهیه چوب قبل از کار برداشت مناسب است. تجزیه و تحلیل رگرسیون توضیحی روابط بین شیارهای خاک، تکنولوژی ماشین و شرایط برداشت چوب را در شبکه جاده نواری توربزارها بررسی کرد. این وابستگی برای حداکثر عمق شیارهای خاک که توسط یک فرستنده در رده ظرفیت حمل دو شکل میگیرد [ 37 ] مدلسازی شد.]. مدلها نشان دادند که آیا تغییر در متغیرهای مستقل منجر به تغییر در شاخصهای کیفیت (یعنی درصد شیارشدگی خاک و حداکثر عمق شیارشدگی خاک) میشود یا خیر.
5. مدل های شاخص کیفیت تجربی
مدل رگرسیون لجستیک روابط بین شناسایی موفق آسیب ساقه درخت و متغیرهای پردازش تصویر را توصیف می کند ( جدول 4 ). هنگامی که شرایط عکاسی معنی دار آماری برای گنجاندن در مدل انتخاب شد، درصد کلی مدل از تشخیص آسیب ساقه موفق 88٪ با شرایط برداشت چوب در عمل موجود بود ( جدول 5 ). این بدان معنی است که شاخص آسیب ساقه درخت در کرت های مورد مطالعه برای استفاده در نظارت بر سیستم مدیریت کیفیت به اندازه کافی دقیق بود. این می تواند به مقامات اجازه دهد تا با موفقیت در مورد کیفیت برداشت چوب تصمیم گیری کنند. اگر کیفیت پایین تر از حد قابل قبول باشد، عملیات کنترل اضافی باید با استفاده از اندازه گیری های دستی در جنگل اجرا شود.
هر دو معیار آسیب شیارگی خاک (یعنی درصد شیار شدن خاک و حداکثر عمق شیار شدن خاک) با عمق سطح آب زیرزمینی، تغییرات ارتفاع (2×2 متر) توده و چگالی پالس های لیزر منعکس شده از همبستگی منفی داشتند. پوشش گیاهی همچنین بین مقادیر پتاسیم و درصد شیارشدگی خاک همبستگی منفی وجود داشت. هر دو متغیر شیاردار خاک با ضخامت لایه ذغال سنگ نارس و مقدار توصیف ارتفاع درخت در توده همبستگی مثبت داشتند.
درجه تبیین مدل رگرسیون حداکثر عمق شیارشدگی خاک 514/0 بود ( جدول 6).). بر اساس ضرایب رگرسیون استاندارد، نوع سیستم برداشت چوب (یعنی سیستم یک ماشینی با یک هارودر در مقابل یک سیستم دو ماشینی با یک دروگر و فورواردر) با موفقیت درجه شیار شدن خاک را توضیح داد. نوع سیستم برداشت مورد استفاده و ضخامت لایه پیت از نظر آماری بسیار معنی دار بود. فاصله حمل و نقل جنگل و عمق تا سطح آب زیرزمینی متغیرهای توضیحی تقریباً معنیدار آماری بودند. هنگامی که ضخامت لایه ذغال سنگ نارس و فاصله حمل و نقل افزایش یافت، حداکثر عمق شیار شدن خاک افزایش یافت. علاوه بر این، هنگامی که عمق سطح آب زیرزمینی کاهش یافت، حداکثر عمق شیارگی خاک کاهش یافت.
با توجه به تحلیل واریانس، مدل از نظر آماری بسیار معنادار بود. انحراف معیار باقیمانده های مدل در هر دو طرف حدود صفر بود که حداکثر عمق شیار کمتر از 15 سانتی متر بود. با عمق شیارشدن خاک بیشتر، مدل مقادیر بالاتر از واقعی را برای حداکثر عمق شیارشگی خاک ارائه میکند، اما مدل با درجه اطمینان کافی در محدوده عملیاتی قابل قبول کار میکند. می توان از آن برای انتخاب غرفه های چوب برای برداشت چوب در تابستان استفاده کرد که در آن حداکثر عمق شیار شدن خاک کمتر یا مساوی 10 سانتی متر است. با توجه به این معیار، داده های تحقیق از 33 قطعه مطالعاتی واقع در توده ها که باید در فصل زمستان برداشت می شدند، جمع آوری شد. این بدان معناست که تصمیمات برداشت چوب اتخاذ شده در تابستان در 86.3 درصد از قطعات مورد مطالعه صحیح بوده است.
6. بحث
آسیب ساقه درختان و شیار شدن خاک به عنوان معیار و شاخص سطح قابل قبول خسارت ناشی از برداشت چوب استفاده می شود. با توجه به هر دو معیار، مشخص نیست که چگونه اندازهگیریهای مکانی آسیب درختان و شیار شدن خاک باید انجام شود و چه کسی از این اندازهگیریها استفاده خواهد کرد. مشخص نیست که آیا اندازهگیریهای مقررات باید برای سیستمهای اطلاعات اداری استفاده شود یا برای سیستمهای مدیریت برداشت چوب در تهیه چوب. این مطالعه توجیهات نتایج مطالعات قبلی در مورد استفاده های پیشنهادی از کاربردهای GIS از جمله رادار نفوذی زمین، عکاسی زمینی، LiDAR هوابرد و زمینی و اسکن پرتو گامای هوابرد و زمینی را ارزیابی کرد.
هدف اصلی این مطالعه بررسی میزان کارآمدی سیستمهای برنامهریزی میتواند مناطق برداشت را برای برداشت چوب انتخاب کند و در عین حال از آسیب برداشت ناشی از ماشینآلات جنگلی جلوگیری کند. بررسی ادبیات، احتمالات مرتبط با استفاده از GIS را نشان داد و مدلها معیارهایی را برای پیشبینی سطوح کیفی مورد نیاز توصیف کردند. LiDAR زمینی می تواند برای سیستم های کنترل کیفیت برداشت چوب توسط مقامات مورد استفاده قرار گیرد، اما این یک سیستم ناکارآمد برای استفاده در برنامه ریزی قبلی بدون جمع آوری داده های پرتو گامای زمینی است. دادههای پرتو گامای خاک و LiDAR هوابرد فقط برای برنامهریزی مناطق بزرگتر در سطح جنگل قابل استفاده هستند، زیرا اطلاعات شامل عدم قطعیت بیش از حد برای برنامهریزی در مناطق کوچکتر قبل از برداشت چوب است. علاوه بر این، LiDAR موجود در هوا به اندازه کافی دقیق نیست، حتی در سطح جنگل، در سیستم های تهیه چوب، زیرا برنامه ریزی برداشت چوب بدون اندازه گیری های مزرعه همچنان چالش برانگیز است. بنابراین، نیاز به استفاده از رادار دستی نفوذ به زمین برای اندازه گیری ضخامت لایه پیت و عمق سطح آب زیرزمینی وجود دارد.49 ]، و این را می توان با مدل شیاربندی خاک استفاده کرد ( جدول 6 ).
هیچ نگرانی در مورد قطع نهایی باز جنگل ها در تورب های زهکشی شده وجود ندارد، اما در صورتی که محل برداشت برای نازک شدن بدون آسیب مناسب باشد، پیش بینی احتمالات زمانی قبل از برداشت چوب بسیار مهم است. با توجه به ادبیات مرتبط، معمولاً نمی توان از شیار شدن زمین های جنگلی اجتناب کرد [ 81 ]. بنابراین، قطع نهایی توربزارها بدون تنک شدن از طریق جنگلداری با چرخش کوتاه میتواند یک روش مدیریت کارآمد از نظر زیستمحیطی باشد. از سوی دیگر، استفاده از ماشین آلات برداشت با فشار نامی زمین کم (<30 کیلو پاسکال) توسط شرکت های تهیه چوب برای ارائه یک روش برداشت چوب سازگار با محیط زیست برای مالکان جنگل مورد نیاز است [ 33 ].]. همچنین باید توجه داشت که ماشینهای ردیابشده برای زمینهای پیتلند نسبت به ماشینهای برداشت چوب چرخدار مناسبتر هستند، زیرا فشار اسمی زمین تولید شده توسط ماشینهای ردیابی به طور یکنواختتر از فشار تولید شده با ماشینهای چرخدار به زمین تقسیم میشود [ 36 ، 82 ].
ضخامت لایه ذغال سنگ نارس و عمق تا سطح آب زیرزمینی به عنوان مهمترین عوامل خاک در مطالعات مربوط به برنامه ریزی برداشت چوب پیتلند و سیستم های مدیریت کیفیت شناسایی شده است. همچنین مشخص شد که آنها متغیرهای مستقل آماری معنیداری در مدل رگرسیون خطی حداکثر عمق شیار هستند ( جدول 6 ). مدلهایی که تغییرات دادههای مکانی را در زمینهای پیت توصیف میکنند، بهعنوان مثال، مقادیر چگالی پالسهای لیزر منعکسشده از درختان و کف شیار خاک، نسبت به مدل ارائهشده در این مطالعه درجه توضیح کمتری داشتند ( جدول 6).). شاخص موفقیت کیفی مورد استفاده در مطالعه حاضر برای برداشت چوب در توربزارها بر اساس درصد شیارشدن خاک است که بر اساس شرایط مورد استفاده در این آزمایش از نظر برداشت عملی چوب، شاخص دقیق کمتری نسبت به حداکثر است. عمق شیار شدن خاک محتمل ترین دلیل برای استفاده از شاخص های مختلف در ادبیات، دشواری اندازه گیری حداکثر عمق شیارشدن خاک توسط LiDAR در شیارهای عمیقی است که ممکن است پر از آب باشد. LiDAR زمینی همچنین دارای چندین مشکل دیگر در هنگام اندازه گیری حداکثر عمق شیارشدگی خاک است که بر دقت محاسبه درصد شیارشدگی خاک نیز تأثیر منفی می گذارد [ 67 ].
ما موافقیم که خاکهای مرطوب در منجلابها و نزدیک نهرها و دریاچهها ظرفیت باربری پایینی دارند و بنابراین بیشتر در معرض شیار شدن هستند. این زمینه پژوهشی چندین نشریه [ 15 ، 16 ] بوده است. تحت این شرایط برداشت، شاخص نقشهکشی عمق به آب تازه توسعهیافته، که جریان و فاصله تا آب آزاد را اندازهگیری میکند، بهترین پیشبینیکننده رطوبت خاک است. زمینه تحقیق ما متفاوت است – برداشت عملیاتی چوب برای تهیه چوب. ما باید ضخامت لایه پیت و فاصله تا سطح آب زیرزمینی را درست قبل از برداشت چوب در عمل اندازه گیری کنیم. علاوه بر این، مناطق برداشت در پیتلند دور از آب های آزاد قرار دارند.
از سوی دیگر، پیشنهاد میشود که نقشههای رطوبتی خاک برگرفته از DTW میتواند برای کاهش هزینههای زیستمحیطی و اقتصادی اثرات ترافیک خارج از جاده، مانند شیارهای غیرقابل قبول خاک استفاده شود [ 15 ].]. با این حال، روابط علی بین دادههای مرتبط با شیار شدن توسط ماشینهای برداشت چوب پس از برداشت عملیاتی چوب به ندرت تحلیل شده است. بر اساس نتایج این مطالعه، تعیین علل متغیر وابسته (شیار شدن) و متغیرهای توضیحی (ضخامت لایه پیت و عمق تا سطح آب زیرزمینی) ضروری است و این موارد باید در عمل اندازهگیری شوند. دقت سیستم های برنامه ریزی برای برش چوب (روش برش به طول) و ارسال چوب به انتخاب هدف اندازه گیری (متغیر توضیحی) بستگی دارد. اگر تحقیقات فقط بر بررسی و توسعه برنامه ریزی جنگل متمرکز شود، می توان از این مشکل جلوگیری کرد. از این نظر، DTW ابزار مفیدی برای برنامه ریزی در سطح جنگل است. در فنلاند، برنامه ریزی جنگل فقط از روش های برداشت چوب استفاده می کند، اما در عمل، لازم نیست ذینفعان کاری انجام دهند. برنامههای برداشت مسئولان برای مالکان جنگل مفید است، اما خریداران چوب باید پس از خرید تودههای جنگلی، قبل از برداشت، برنامهریزی بسیار دقیقتری برای تودههای جنگلی انجام دهند، زیرا مسئول خسارت هستند.
LiDAR برای استفاده در برنامه ریزی جنگل در چندین نشریه پیشنهاد شده است. به عنوان مثال، پیشرفتهای اخیر DTW با پتانسیل نقشهبرداری و تأثیرات واقعی آشفتگی خاک به منظور انجام ارزیابی ترددپذیری خاک خارج از جاده سروکار دارد (کمپبل و همکاران 2013). به گفته کمبل، بهترین رگرسیون حاصل بین شاخص مخروطی، log(10) (DTW) و ارتفاع (یا منطقه مورد مطالعه) برای نقشهبرداری از شاخص مخروطی و اعماق شیارهای مخصوص وسایل نقلیه زمین تفریحی مورد انتظار در سراسر چشمانداز استفاده شد. نقشه های تولید شده به طور کلی با نتایج یک بررسی اختلال خاک به طول 40 کیلومتر که در امتداد یک بخش دنباله وسیله نقلیه تفریحی در منطقه کوهپایه انجام شد، مطابقت داشت. با این حال، آنها شیارهای ناشی از ماشینهای برداشت چوب را مدلسازی نکردند، که زمینه تحقیق این مطالعه است. از این رو، استفاده از LiDAR و DTW برای تهیه چوب باید در عمل تجزیه و تحلیل شود قبل از اینکه بتوانیم آنها را برای استفاده در سیستم های برنامه ریزی برداشت چوب در سطح جنگل توصیه کنیم. متأسفانه، آزمایشهای برداشت چوب واقعی وجود ندارد، یا فقط آزمایشهای رانندگی جزئی هستند.
مزایای برنامهریزی واقعی جنگلداری LiDAR شامل بهبود برنامهریزی برداشت چوب (تابستان در مقابل پاییز در مقابل زمستان)، ناوبری در میدان، بهینهسازی مسیرهای دسترسی غرفهها و راهنمایی در مسیرهای حمل و نقل چوب [ 15 ، 83 ] است. با این حال، در یک مطالعه اخیر، اندازه گیری شیارها مستقل از میزان رطوبت خاک بود که با استفاده از DTW [ 84 ] شبیه سازی شد. تأثیر رطوبت خاک بر شیارهای خاک به طور گسترده گزارش شده است [ 85 ، 86]، و نشان داده شده است که تأثیر اجتناب ناپذیری بر شیار شدن دارد. محتوای رطوبت نسبتاً کم (40 درصد حجمی) موجود در طول آزمایشهای صحرایی، قابلیت پیشبینی عمق شیار را با استفاده از شاخصهای کارتوگرافی محدود میکند. اگرن و همکاران [ 15 ] همچنین به هدف دیگری در رابطه با استفاده از دانش نقشهنگاری برای تعیین نحوه چیدمان مسیرهای پیشبینی شده بسته به شرایط آب و هوایی فعلی یا پیشبینیشده با تغییر شاخص DTW با استفاده از آستانه شروع جریان اشاره کرد [ 87 ]، یعنی تعیین زمان و مکان. برداشت چوب باید بسته به شرایط جوی و خاک غالب از منظر عملیات جنگلی انجام شود.
در تهیه چوب توسط صنعت جنگل، ارزیابی دقیق شرایط برداشت قبل از استفاده از تردد ماشینها برای برنامهریزی عملیاتی برای اطمینان از استفاده کارآمد از ماشین و جلوگیری از آسیب به درختان و توربزارها یا مسیرهای عملیاتی ماشین ضروری است. از این نظر، به نظر میرسد شاخصهای نقشهبرداری مبتنی بر سنجش از دور برای استفاده در عملیات نویدبخش هستند، زیرا ممکن است بتوانند پیشبینی شیارهای خاک را انجام دهند. با این حال، سطح بالایی از دقت اندازهگیری باید از قبل در نظر گرفته شود، به عنوان مثال، DTW مبتنی بر LiDAR به عنوان جایگزین قابل اعتمادی برای اندازهگیریهای میدانی زمین مکانیکی معمولی شرایط واقعی جایگاه برداشت چوب در عمل ثابت نشده است [ 84 ]]. به جای LiDAR هوابرد، رادار دستی نفوذ به زمین می تواند برای اندازه گیری ضخامت لایه ذغال سنگ نارس و عمق سطح آب زیرزمینی استفاده شود تا مدل شیارشدن خاک دقیق تری ارائه شود [ 49 ]. بر خلاف LiDAR، هر دو اندازهگیری میدان ترامکانیکی دادههایی را بر اساس متغیرهای توجیهی توجیهشده مربوط به شیارشدن خاک تولید میکنند.
این مطالعه ادبیات مربوط به GIS مربوط به مدیریت کیفیت محیطی را برای جلوگیری از آسیب برداشت چوب بررسی کرد. این نتایج به ذینفعان خرید چوب دیدگاه مفیدی را برای تسهیل مقایسه بین سیستم های اطلاعاتی مناسب برای توسعه مدیریت کیفیت ارائه می دهد. شکل 1 جریان اطلاعات سیستم مدیریت تدارکات چوب را در سطح کلی نشان می دهد. علاوه بر این، شکل 3فلوچارت اطلاعات فضایی برداشت چوب را ارائه می دهد که می تواند برای توسعه یک سیستم مدیریت کیفیت مبتنی بر GIS برای تهیه چوب استفاده شود. نمودارهای جریان نشان می دهد که مدیران و پیمانکاران مسئول برنامه ریزی برداشت چوب هستند زیرا برنامه ریزی باید درست قبل از برداشت چوب عملیاتی انجام شود. در عمل، اپراتور دروگر مسیرهای انتخابی را برای فورواردرها در طول عملیات ورود به سیستم اجرا میکند و اپراتور فورواردر فقط تصمیم میگیرد که در مسیرهای آماده رانندگی کند یا نبرد. همچنین خاطرنشان می شود که به حداقل رساندن آسیب ساقه درخت و خطر شیار شدن خاک در عملیات مکانیزه جنگل مستلزم برنامه ریزی دقیق به ترتیب اولویت زیر است: انتخاب ماشین آلات، زمان بندی فصلی برداشت چوب، رانندگی با ماشین ماهر و انتخاب مسیر برای حمل و نقل در جنگل.
7. نتیجه گیری
در حال حاضر، سیستم های نظارت و کنترلی که به طور خودکار اطلاعات مکانی را در مورد آسیب برداشت چوب جمع آوری می کنند، به خوبی شناخته شده نیستند. چندین محقق به این نتیجه رسیدهاند که GIS مورد نیاز برای چنین سیستمهایی هنوز در دسترس نیست، زیرا انتظارات در مورد نصب آنها در ماشینآلات برش تا طول تک گیره (یعنی دروگرها) بسیار خوش بینانه بوده است. این مطالعه هر دو شیار شدن خاک و آسیب درختان را با توجه به سیستمهای مدیریت کیفیت دستی و دیجیتالی فعلی بررسی کرد. استفاده از ترکیبی از سیستم های دستی و اتوماتیک برای مقامات و مدیران تدارکات چوب پیشنهاد شده است. عکاسی از آسیب برداشت چوب توسط دوربین استریو روشی مقرون به صرفه و سودآور برای جمع آوری داده ها در عمل است و دوربین باید در کابین حمل کننده نصب شود. بر اساس پردازش خودکار تصویر و محاسبات شاخص کیفیت برداشت، آسیب جنگل می تواند به صورت دستی توسط مقامات کنترل شود. این سیستم مدیریت کیفیت همچنین یک سیستم مقرونبهصرفه برای مقامات است زیرا اندازهگیریهای کیفی دستی آنها به جای انتخاب تصادفی اهداف جنگلی اغلب با کیفیت خوب، که در حال حاضر انجام میشود، فقط بر روی تودههای آسیبدیده با کیفیت پایین متمرکز است. مقامات همچنین می توانند از سیستم های اسکن لیزری برای جمع آوری داده های مکانی برای اهداف هنجاری و استراتژیک در سطح فهرست جنگل های ملی استفاده کنند. علاوه بر این، صنعت جنگل و پیمانکاران می توانند از سیستم مدیریت کیفیت باز مقامات، داده های خاک مکانی و مدل شیارشدن خاک در سیستم های برنامه ریزی خود برای بهبود کیفیت برداشت چوب و دستیابی به پایداری زیست محیطی استفاده کنند. آسیب جنگل را می توان به صورت دستی توسط مقامات کنترل کرد. این سیستم مدیریت کیفیت همچنین یک سیستم مقرونبهصرفه برای مقامات است زیرا اندازهگیریهای کیفی دستی آنها به جای انتخاب تصادفی اهداف جنگلی اغلب با کیفیت خوب، که در حال حاضر انجام میشود، فقط بر روی تودههای آسیبدیده با کیفیت پایین متمرکز است. مقامات همچنین می توانند از سیستم های اسکن لیزری برای جمع آوری داده های مکانی برای اهداف هنجاری و استراتژیک در سطح فهرست جنگل های ملی استفاده کنند. علاوه بر این، صنعت جنگل و پیمانکاران می توانند از سیستم مدیریت کیفیت باز مقامات، داده های خاک مکانی و مدل شیارشدن خاک در سیستم های برنامه ریزی خود برای بهبود کیفیت برداشت چوب و دستیابی به پایداری زیست محیطی استفاده کنند. آسیب جنگل را می توان به صورت دستی توسط مقامات کنترل کرد. این سیستم مدیریت کیفیت همچنین یک سیستم مقرونبهصرفه برای مقامات است زیرا اندازهگیریهای کیفی دستی آنها به جای انتخاب تصادفی اهداف جنگلی اغلب با کیفیت خوب، که در حال حاضر انجام میشود، فقط بر روی تودههای آسیبدیده با کیفیت پایین متمرکز است. مقامات همچنین می توانند از سیستم های اسکن لیزری برای جمع آوری داده های مکانی برای اهداف هنجاری و استراتژیک در سطح فهرست جنگل های ملی استفاده کنند. علاوه بر این، صنعت جنگل و پیمانکاران می توانند از سیستم مدیریت کیفیت باز مقامات، داده های خاک مکانی و مدل شیارشدن خاک در سیستم های برنامه ریزی خود برای بهبود کیفیت برداشت چوب و دستیابی به پایداری زیست محیطی استفاده کنند. این سیستم مدیریت کیفیت همچنین یک سیستم مقرونبهصرفه برای مقامات است زیرا اندازهگیریهای کیفی دستی آنها به جای انتخاب تصادفی اهداف جنگلی اغلب با کیفیت خوب، که در حال حاضر انجام میشود، فقط بر روی تودههای آسیبدیده با کیفیت پایین متمرکز است. مقامات همچنین می توانند از سیستم های اسکن لیزری برای جمع آوری داده های مکانی برای اهداف هنجاری و استراتژیک در سطح فهرست جنگل های ملی استفاده کنند. علاوه بر این، صنعت جنگل و پیمانکاران می توانند از سیستم مدیریت کیفیت باز مقامات، داده های خاک مکانی و مدل شیارشدن خاک در سیستم های برنامه ریزی خود برای بهبود کیفیت برداشت چوب و دستیابی به پایداری زیست محیطی استفاده کنند. این سیستم مدیریت کیفیت همچنین یک سیستم مقرونبهصرفه برای مقامات است زیرا اندازهگیریهای کیفی دستی آنها به جای انتخاب تصادفی اهداف جنگلی اغلب با کیفیت خوب، که در حال حاضر انجام میشود، فقط بر روی تودههای آسیبدیده با کیفیت پایین متمرکز است. مقامات همچنین می توانند از سیستم های اسکن لیزری برای جمع آوری داده های مکانی برای اهداف هنجاری و استراتژیک در سطح فهرست جنگل های ملی استفاده کنند. علاوه بر این، صنعت جنگل و پیمانکاران می توانند از سیستم مدیریت کیفیت باز مقامات، داده های خاک مکانی و مدل شیارشدن خاک در سیستم های برنامه ریزی خود برای بهبود کیفیت برداشت چوب و دستیابی به پایداری زیست محیطی استفاده کنند. مقامات همچنین می توانند از سیستم های اسکن لیزری برای جمع آوری داده های مکانی برای اهداف هنجاری و استراتژیک در سطح فهرست جنگل های ملی استفاده کنند. علاوه بر این، صنعت جنگل و پیمانکاران می توانند از سیستم مدیریت کیفیت باز مقامات، داده های خاک مکانی و مدل شیارشدن خاک در سیستم های برنامه ریزی خود برای بهبود کیفیت برداشت چوب و دستیابی به پایداری زیست محیطی استفاده کنند. مقامات همچنین می توانند از سیستم های اسکن لیزری برای جمع آوری داده های مکانی برای اهداف هنجاری و استراتژیک در سطح فهرست جنگل های ملی استفاده کنند. علاوه بر این، صنعت جنگل و پیمانکاران می توانند از سیستم مدیریت کیفیت باز مقامات، داده های خاک مکانی و مدل شیارشدن خاک در سیستم های برنامه ریزی خود برای بهبود کیفیت برداشت چوب و دستیابی به پایداری زیست محیطی استفاده کنند.
منابع
- پالاندر، تی. هاویککو، اچ. Kärhä، K. به سوی خرید چوب پایدار در صنعت جنگل – بهره وری انرژی وسایل نقلیه بزرگتر و سنگین تر در فنلاند. تمدید کنید. حفظ کنید. Energy Rev. 2018 , 96 , 100-118. [ Google Scholar ] [ CrossRef ]
- پالاندر، تی. هاویککو، اچ. کورتلاینن، ای. Kärhä, K. مقایسه شاخص های بهره وری انرژی حمل و نقل جاده ای برای مدل سازی پایداری محیطی در صنعت دایره ای “سبز”. پایداری 2020 ، 12 ، 2740. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- گزارش دولت در مورد استراتژی ملی انرژی و اقلیم برای سال 2030. وزارت امور اقتصادی و اشتغال فنلاند، انتشارات وزارت امور اقتصادی و اشتغال 4. 2017. موجود آنلاین: https://julkaisut.valtioneuvosto.fi/bitstream/handle /10024/79247/TEMjul_12_2017_verkkojulkaisu.pdf (دسترسی در 27 فوریه 2021).
- برنامه جنگل ملی فنلاند رفاه بیشتر از جنگل های متنوع – قطعنامه دولت. انتشار فین وزیر کشاورزی برای. 2015 ، 3 ، 1-52.
- لاوکانن، اس. پالاندر، تی. کانگاس، جی. استفاده از نظریه رای گیری در حمایت از تصمیم گیری مشارکتی برای برداشت چوب پایدار. می توان. جی. برای. Res. 2004 ، 34 ، 1511-1524. [ Google Scholar ] [ CrossRef ]
- پالاندر، تی. ارونن، جی. پلتونیمی، ن. آرنیو، ا. کاره، ک. Ovaskainen، H. بهبود یک سیستم نظارت بر آسیب ساقه برای یک دروگر تک دسته با استفاده از یک مدل رگرسیون لجستیک در پردازش تصویر. Biosyst. مهندس 2019 ، 180 ، 36-49. [ Google Scholar ] [ CrossRef ]
- یوسیتالو، جی. آلا-ایلوماکی، ج. لیندمن، اچ. توییو، جی. Sirén، M. مدلسازی رطوبت خاک – رابطه قدرت خاک خاکهای جنگلی مرتفع ریزدانه. Silva Fennica 2019 ، 53 ، 10050. [ Google Scholar ] [ CrossRef ]
- سالمیوارا، ا. میتینن، ام. فینر، ال. لاونیاینن، اس. کورپونن، اچ. توومینن، اس. هایکونن، جی. نوالاینن، پی. سیرن، م. آلا-ایلوماکی، ج. و همکاران اندازه گیری شیار چرخ توسط حسگرهای LiDAR نصب شده در ماشین جنگل – دقت و پتانسیل برای کاربردهای عملیاتی؟ بین المللی جی. برای. مهندس 2018 ، 29 ، 41-52. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Palander، T. یک سیستم محلی DLP-GIS-LP برای برنامه ریزی و تصمیم گیری تدارکات چوب غیرمتمرکز جغرافیایی. سیلوا فن 1997 ، 31 ، 179-192. [ Google Scholar ] [ CrossRef ]
- Dean, DJ یافتن مسیرهای بهینه برای شبکه های جاده های دسترسی محل برداشت با استفاده از تکنیک های مبتنی بر GIS. می توان. جی. برای. Res. 1997 ، 27 ، 11-22. [ Google Scholar ] [ CrossRef ]
- دانلون، جی جی. Forbus، KD با استفاده از یک سیستم اطلاعات جغرافیایی برای استدلال فضایی کیفی در مورد ترافیک. In Proceedings of the QR99, Loch Awe, UK, 6–9 ژوئن 1999; در دسترس آنلاین: https://www.qrg.northwestern.edu/papers/Files/Donlon_Forbus_QR99_Distribution.pdf (دسترسی در 23 آوریل 2021).
- کیو، آر. Mikkonen، E. سیستم پشتیبانی تصمیم گیری مبتنی بر GIS برای لجستیک چوب. برای. گل میخ. چین 2004 ، 6 ، 29-33. [ Google Scholar ] [ CrossRef ]
- Suvinen، A. یک مدل شبیه سازی مبتنی بر GIS برای تراکم پذیری زمین. J. Terramech. 2006 ، 43 ، 427-449. [ Google Scholar ] [ CrossRef ]
- واینیو، پ. توکولا، تی. پالاندر، تی. Kangas، A. یک سیستم مدیریت پایه مبتنی بر GIS برای تخمین منابع انرژی محلی چوب. Biomass Bioenergy 2009 ، 33 ، 1278-1288. [ Google Scholar ] [ CrossRef ]
- Ågren، AM; لیدبرگ، دبلیو. حلقه، E. ترسیم پویایی های زمانی در یک شبکه جریان جنگلی – مفاهیمی برای مدیریت جنگل های ساحلی. Forests 2015 ، 6 ، 2982-3001. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Ågren، AM; لیدبرگ، دبلیو. استرومگرن، ام. اوگیلوی، جی. Arp، PA ارزیابی شاخصهای زمین دیجیتال برای نقشهبرداری رطوبت خاک – مطالعه موردی سوئدی. هیدرول. زمین. سیستم علمی 2014 ، 18 ، 3623-3634. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نیمی، MT; واستارانتا، م. واکونن، جی. ملكاس، ت. Holopainen، M. دادههای ارتفاعی مشتقشده از LIDAR در نقشهبرداری قابلیت تردد زمین. Scand. جی. برای. Res. 2017 ، 32 ، 762-773. [ Google Scholar ] [ CrossRef ]
- کمپبل، DMH؛ سفید، بی. Arp، PA مدل سازی و نقشه برداری مقاومت خاک در برابر نفوذ و شیار با استفاده از داده های ارتفاعی دیجیتال مشتق شده از LiDAR. J. حفظ آب خاک. 2013 ، 68 ، 460-473. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جونز، M.-F. Arp، PA مربوط به نفوذ مخروط و مقاومت شیاردار به تغییرات در خواص خاک جنگل و نوسانات رطوبت روزانه. باز J. Soil Sci. 2017 ، 7 ، 149-171. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هونگ، دی. گائو، ال. یوکویا، ن. یائو، جی. چانوسوت، جی. دو، س. ژانگ، بی. تنوع بیشتر یعنی بهتر: یادگیری عمیق چندوجهی با طبقهبندی تصاویر سنجش از دور مطابقت دارد. IEEE Trans. Geosci. Remote Sens. 2020. [ CrossRef ]
- پان، X. گائو، ال. مارینونی، آ. ژانگ، بی. یانگ، اف. گامبا، P. برچسبگذاری معنایی تصاویر هوایی با وضوح بالا و دادههای LiDAR با شبکه تقسیمبندی ظریف. Remote Sens. 2018 , 10 , 743. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یائو، جی. منگ، دی. ژائو، کیو. کائو، دبلیو. Xu، Z. غیرمحدب-پراکندگی و غیرمحلی-صافی مبتنی بر غیرمخلوط ابرطیفی کور. IEEE Trans. Image Process 2019 ، 28 ، 2991-3006. [ Google Scholar ] [ CrossRef ]
- آمار جنگل فنلاند 2020; موسسه منابع طبیعی فنلاند: هلسینکی، فنلاند؛ 573p، در دسترس آنلاین: https://stat.luke.fi/en/uusi-etusivu (در 23 آوریل 2021 قابل دسترسی است).
- اطلاعات در مورد اقدامات LULUCF. 2016; گزارش پیشرفت؛ وزارت زراعت و جنگلداری؛ 24p. در دسترس آنلاین: https://uk-air.defra.gov.uk/assets/documents/reports/cat07/1703311112_UK_LULUCF_Action_Progress_Report.pdf (در 23 آوریل 2021 قابل دسترسی است).
- آمار جنگل فنلاند 2019; موسسه منابع طبیعی فنلاند: هلسینکی، فنلاند؛ 417p، در دسترس آنلاین: https://stat.luke.fi/en/uusi-etusivu (در 23 آوریل 2021 قابل دسترسی است).
- کاره، ک. تامینن، تی. لینونن، تی. Suvinen، A. کاهش فصلی در عملیات برداشت چوب در فنلاند. در مجموعه مقالات سمینار مشترک ترتیب داده شده توسط NB-NORD و NOFOBE، Lappeenranta، فنلاند، 14-16 ژوئن 2017. 47، ص. 41. [ Google Scholar ]
- رز، جی سی. پاولوس، اس. Kuhlmann، H. تجزیه و تحلیل دقت یک رویکرد استریو چند نما برای فنوتیپ کردن گیاهان گوجه فرنگی در سطح اندام. Sensors 2015 , 15 , 9651–9665. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فورسمن، ام. بورلین، ن. Holmgren, J. برآورد صفات ساقه درخت با استفاده از فتوگرامتری زمینی با دوربین. Forests 2016 ، 7 ، 61. [ Google Scholar ] [ CrossRef ]
- نوالاینن، پی. سالمیوارا، ا. آلا-ایلوماکی، ج. لاونیاینن، اس. هیدانپا، جی. فینر، ال. Pahikkala، P. Heikkonen, J. تخمین عمق شیار توسط فتوگرامتری پهپاد. Remote Sens. 2017 , 9 , 1279. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Hyyppä، J.; ویرتانن، جی.-پی. جااکولا، ا. یو، ایکس. Hyyppä، H.; لیانگ، ایکس. امکان سنجی Google Tango و Kinect برای جمع سپاری اطلاعات جنگلداری. Forests 2018 ، 9 ، 6. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Hyyppä، J.; Inkinen, M. تشخیص و تخمین صفات برای تک درختان با استفاده از اسکنر لیزری. فتوگرامتری J. Finl. 1999 ، 16 ، 27-42. [ Google Scholar ]
- آلا-ایلوماکی، ج. هوگناس، تی. لامینن، اس. Sirén, M. تجهیز یک فورواردر چرخ دار معمولی برای عملیات peatland. بین المللی جی. برای. مهندس 2011 ، 22 ، 7-13. [ Google Scholar ] [ CrossRef ]
- پالاندر، تی. پونتیلا، تی. Kariniemi، A. Forwarder’s کنترل انبوه با یک لودر برای برداشت چوب در پیتلند. میرس پیت 2012 ، 63 ، 57-72. [ Google Scholar ]
- یوسیتالو، جی. Ala-Ilomäki، J. اهمیت زیست توده بالای زمین، محتوای رطوبت و خواص مکانیکی لایه ذغال سنگ نارس بر ظرفیت باربری باتلاق های کاج خندق شده. سیلوا فن 2013 ، 47 ، 1-18. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یوسیتالو، جی. سالوماکی، م. Ala-Ilomäki، J. اثر مسیرهای پیادهروی گستردهتر بر تشکیل شیارها در برداشت جنگلهای peatland. کروات. جی. برای. مهندس 2015 ، 36 ، 125-130. [ Google Scholar ]
- برگروث، جی. پالاندر، تی. Kärhä, K. دروگرهای مبتنی بر بیل مکانیکی در عملیات برش چوب در فنلاند. برای. گل میخ. 2006 ، 45 ، 74-88. [ Google Scholar ]
- هوگناس، تی. کاره، ک. لیندمن، اچ. پالاندر، تی. طبقه بندی ظرفیت تحمل برای رقیق شدن تورب. Metsätehon Tuloskalvosarja 2009 ، 17 ، 1-24. [ Google Scholar ]
- کاره، ک. Oinas، S. رضایت و وفاداری شرکت که توسط مالکان غیر صنعتی جنگل های خصوصی نسبت به سازمان های تهیه الوار در فنلاند بیان شده است. سیلوا فن 1998 ، 32 ، 27-42. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Kärhä, K. مدلسازی سوابق و پیامدهای رضایت مالکان جنگل در معاملات فروش الوار. جی. برای. اقتصاد 1999 ، 5 ، 389-411. [ Google Scholar ]
- کاره، ک. ارونن، جی. پالاندر، تی. اواسکاینن، اچ. ریکی، ک. Hämäläinen، H. نیازهای اطلاعاتی مالکان جنگل های خصوصی غیر صنعتی پس از عملیات چوب برداری در فنلاند: یک مطالعه موردی. مقیاس کوچک برای. 2020 ، 19 ، 205-230. [ Google Scholar ] [ CrossRef ]
- سووینن، ا. توکولا، تی. Saarilahti، M. پیش بینی ترافیک زمین با تجزیه و تحلیل GIS. برای. علمی 2009 ، 55 ، 433-442. [ Google Scholar ]
- افسانه نقشه خاک جهان ; فائو/یونسکو: پاریس، فرانسه، 1974; جلد 1، صص 1–62.
- Yli-Halla، M. طبقه بندی خاک های اسید سولفات فنلاند بر اساس طبقه بندی خاک و افسانه FAO/یونسکو. کشاورزی علوم غذایی فنلاند 1997 ، 6 ، 247-258. [ Google Scholar ] [ CrossRef ]
- یلی هالا، م. Mokma، DL طبقه بندی خاک های فنلاند بر اساس طبقه بندی خاک. خاک Surv. هوریز. 1999 ، 40 ، 56-69. [ Google Scholar ] [ CrossRef ]
- دیویس، جی ال. عنان، رادار نافذ زمینی AP برای نقشه برداری با وضوح بالا از چینه شناسی خاک و سنگ. ژئوفیز. چشم انداز. 1989 ، 37 ، 531-551. [ Google Scholar ] [ CrossRef ]
- پلادو، جی. سیبول، آی. مستعار، م. Jõeleht، A. مطالعه رادار نفوذی زمین در باتلاق ذغال سنگ نارس Rahivere، شرق استونی. برآورد J. Earth Sci. 2011 ، 60 ، 31-42. [ Google Scholar ] [ CrossRef ]
- پری، LE; غرب، LJ; هولدن، جی. چاپمن، پی جی ارزیابی رویکردهای تخمین عمق پیت. جی. ژئوفیس. Res. Biogeosci. 2014 ، 119 ، 567-576. [ Google Scholar ] [ CrossRef ]
- کوماس، ایکس. تری، ن. اسلاتر، ال. وارن، ام. کلکا، ر. کریستیونو، ا. سودیانا، ن. نورجمان، د. Darusman، T. تصویربرداری از توربزارهای استوایی در اندونزی با استفاده از رادار نفوذی زمین (GPR) و تصویربرداری مقاومت الکتریکی (ERI): پیامدهایی برای تخمینهای ذخایر کربن و توصیف خاک ذغال سنگ نارس. Biogeosciences 2015 ، 12 ، 2995-3007. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پارسکیان، م. اسلاتر، ال. نترلاگیانیس، دی. نولان، جی. Sebesteyen، SD; کلکا، RK; Hanson، PJ عدم قطعیت در حجم ذغال سنگ نارس و کربن خاک با استفاده از رادار و کاوشگر نافذ زمین تخمین زده شد. علم خاک Soc. صبح. J. 2012 , 76 , 1911-1918. [ Google Scholar ] [ CrossRef ]
- یوسیتالو، جی. Ala-Ilomäki، J. طبقه بندی قابلیت تردد زمین ماشین آلات چوب بری در منجلاب های کاج. در: شماره ویژه. چکیده کنفرانس های بین المللی که توسط LSFRI Silava با همکاری SNS و IUFRO برگزار می شود. Mezzinatne 2012 ، 25 ، 85-87. [ Google Scholar ]
- هولدن، NM; کانولی، جی. تخمین ذخایر کربن یک منطقه پیت پتو با استفاده از مدل استنتاج عمق پیت. کاتنا 2011 ، 86 ، 75-85. [ Google Scholar ] [ CrossRef ]
- خانوار، JE; Janovec، JP; توبلر، مگاوات؛ پیج، اس. Lähteenoja، O. Peatlands رودخانه Madre de Dios پرو: توزیع، ژئومورفولوژی، و تنوع زیستگاهی. Wetlands 2012 ، 32 ، 359-368. [ Google Scholar ] [ CrossRef ]
- آکومو، م. مک لافلین، جی. مدلسازی ذخایر کربن پیتلند در بخش مشخصی از حوضه آبخیز رودخانه Nayshkootayaow در شمال دور انتاریو، با استفاده از یک سیستم اطلاعات جغرافیایی یکپارچه و رویکرد سنجش از دور. Catena 2014 ، 121 ، 297-306. [ Google Scholar ] [ CrossRef ]
- Hyyppä، J.; کلی، او. Lehikoinen، M. Inkinen، M. روشی مبتنی بر تقسیم بندی برای بازیابی تخمین های حجم ساقه از مدل های ارتفاع درخت سه بعدی تولید شده توسط اسکنر لیزری. IEEE Trans. Geosci. Remote Sens. 2001 , 39 , 969-975. [ Google Scholar ] [ CrossRef ]
- پیکیو، آر. لاترینی، اف. مدرسکی، ص. توچی، دی. ونانزی، ر. استفانونی، دبلیو. Pari, L. کاربردهای نرم افزار مبتنی بر GIS برای بهبود پایداری عملیات حمل و نقل در مرکز ایتالیا. پایداری 2020 ، 12 ، 5716. [ Google Scholar ] [ CrossRef ]
- پوهجانکوکا، ج. نوالاینن، پی. Pahikkala، T. هیونن، ای. هانینن، پ. سوتینن، آر. آلا-ایلوماکی، ج. Heikkonen, J. پیش بینی نفوذپذیری آب خاک بر اساس داده های باز. در مجموعه مقالات دهمین کنفرانس بین المللی کاربردها و نوآوری های هوش مصنوعی (AIAI 2014)، رودس، یونان، 19 تا 21 سپتامبر 2014 . پیشرفت های IFIP در فناوری اطلاعات و ارتباطات؛ Iliadis, L., Maglogiannis, I., Papadopoulos, H., Eds. Springer: برلین/هایدلبرگ، آلمان، 2014; جلد 436، ص 436–446. [ Google Scholar ]
- پری، LE; چارمن، دی جی; Noades، JPW روشی برای مدلسازی عمق پیت در زمینهای پت پتو. مدیریت استفاده از خاک 2012 ، 28 ، 614-624. [ Google Scholar ] [ CrossRef ]
- رودیانتو، MB; ستیوان، BI; عارف، ج. Saptomo، SK; Chadirin، Y. نقشه برداری دیجیتال برای پیش بینی مقرون به صرفه و دقیق از عمق و ذخایر کربن در تورب های اندونزی. Geoderma 2016 ، 272 ، 20-31. [ Google Scholar ] [ CrossRef ]
- گاتیس، ن. لوسکومب، دی جی; کارلس، دی. پری، LE; Fyfe، RM; هارود، TR; Brazier, RE; اندرسون، ک. نقشه برداری عمق پیت کوهستانی با استفاده از داده های بررسی رادیومتری هوابرد و لیدار. Geoderma 2019 ، 335 ، 78-87. [ Google Scholar ] [ CrossRef ]
- ماتیلا، یو. Tokola، T. برآورد تحرک زمین با استفاده از داده های پرتو گامای TWI و هوابرد. جی. محیط زیست. مدیریت 2018 ، 232 ، 531-536. [ Google Scholar ] [ CrossRef ]
- هیونن، ای. تورونن، پی. وانانن، ای. آرکیما، اچ. Sutinen، R. بررسی های پرتو گامای هوابرد در فنلاند. در: Airo, M.-L. (ویرایش). آئروژئوفیزیک در فنلاند 1972-2004. روش ها، ویژگی های سیستم و کاربردها. جئول Surv. فنلاند 2005 ، 39 ، 119-134. [ Google Scholar ]
- Grasty، RL رادون و اثرات رطوبت خاک بر اندازهگیریهای پرتو گاما در هوا. ژئوفیزیک 1997 ، 62 ، 1379-1385. [ Google Scholar ] [ CrossRef ]
- آیرو، ام.-ال. پاسخ هوا مغناطیسی و آئرورادیومتری به دگرسانی گرمابی Surv. ژئوفیز. 2002 ، 23 ، 273-302. [ Google Scholar ] [ CrossRef ]
- هیونن، ای. پانتاجا، م. سوتینن، ام.-ال. Sutinen, R. ارزیابی مناسب بودن سایت برای کاج اسکاتلندی با استفاده از اندازهگیریهای پرتو گامای هوابرد و زمینی در لاپلند فنلاند. می توان. جی. برای. Res. 2003 ، 33 ، 796-806. [ Google Scholar ] [ CrossRef ]
- Virtanen، K. داده های تابش گامای ژئوفیزیکی هوابرد در تحقیقات ذغال سنگ نارس. در: زمین شناسی اقتصادی کواترنر در کشورهای شمال اروپا. STRIAE 1990 ، 29 ، 111-114. [ Google Scholar ]
- هلستوم، تی. Lärkeryd، P. نوردفجل، تی. Ringdahl، O. خودروهای جنگلی خودمختار: تاریخی، پیشبینیشده و پیشرفته. بین المللی جی. برای. مهندس 2009 ، 20 ، 31-38. [ Google Scholar ]
- کنگ، جی. وانگ، ز. جین، ایکس. وانگ، ایکس. سو، تی. Wang, J. چارچوب تقسیمبندی نیمه نظارت شده بر اساس وکسلسازی فوقالعاده نقطهای واگرایی دادههای فیوژن چند سنسوری برای برنامههای ماشین جنگلی خودمختار. Sensors 2018 , 18 , 3061. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آلا-ایلوماکی، ج. کوهن، جی. هایلیمو، جی. هیونن، ای. هانینن، پ. آیکنن، جی. میدلتون، ام. نوالاینن، پی. Pahikkala، T. پوهجانکوکا، ج. و همکاران روش های محاسباتی جدید برای استفاده کارآمد از داده های عمومی جئول Surv. فنلاند تحقیق. 2015 ، 217 ، 1-55. [ Google Scholar ]
- لیانگ، ایکس. کانکاره، وی. Hyyppä، J.; وانگ، ی. کوکو، ا. هاگرن، اچ. یو، ایکس. کارتینن، اچ. جااکولا، ا. گوان، اف. و همکاران اسکن لیزری زمینی در فهرست جنگل ها ISPRS J. Photogramm. Remote Sens. 2016 ، 115 ، 63-77. [ Google Scholar ] [ CrossRef ]
- ژونگ، ال. چنگ، ال. خو، اچ. وو، ی. چن، ی. Li، M. تقسیم بندی درختان فردی از داده های TLS و MLS. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2017 , 10 , 774–787. [ Google Scholar ] [ CrossRef ]
- ایگلهات، جی. کابو، سی. پولیتی، س. پیرماتی، ال. اوکانر، جی. Rosette, J. Structure from Motion Photogrammetry in Forestry: A Review. Curr. برای. Rep. 2019 , 5 , 155–168. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پوهجانکوکا، ج. Pahikkala، T. نوالاینن، پی. Heikkonen, J. برآورد عملکرد پیشبینی مدلهای فضایی از طریق اعتبارسنجی متقاطع k-fold فضایی. بین المللی جی. جئوگر. Inf. علمی 2017 ، 31 ، 2001–2019. [ Google Scholar ] [ CrossRef ]
- پوهجانکوکا، ج. ریهیماکی، اچ. نوالاینن، پی. Pahikkala، T. آلا-ایلوماکی، ج. هیونن، ای. وارجو، ج. Heikkonen، J. قابل پیش بینی ظرفیت باربری خاک جنگل های شمالی با یادگیری ماشین. J. Terramech. 2016 ، 68 ، 1-8. [ Google Scholar ] [ CrossRef ]
- Acuna, M. اندازه گیری حجمی خودکار بارهای کامیون از طریق فتوگرامتری چند نمای و نرم افزار پردازش تصویر سه بعدی. در مجموعه مقالات FORMEC 2017: پنجاهمین سالگرد سمپوزیوم بین المللی در مورد مکانیزاسیون جنگلداری، براشوف، رومانی، 25 تا 29 سپتامبر 2017. [ Google Scholar ]
- آکونا، ام. Sosa, A. اندازه گیری حجمی خودکار بارهای کامیون از طریق فتوگرامتری چند نمای و نرم افزار بازسازی سه بعدی. کروات. جی. برای. مهندس 2019 ، 40 ، 151-162. [ Google Scholar ]
- برز، س. آکونا، ام. هاینیمن، اچ. پالاندر، تی. Spinelli، R. نوآوری در مزیت رقابتی: از تحقیق تا تأثیر در زنجیره ارزش جنگل: نیم قرن FORMEC. ان برای. Res. 2017 ، 60 ، 199-201. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مارا، ای. کامبی، ام. فرناندز-لاکروز، آر. جیانتی، اف. مارکی، ای. Nordfjell, T. برآورد فتوگرامتری ابعاد شیار چرخ و فشردگی خاک پس از افزایش تعداد پاس های فوروارد. Scand. جی. برای. Res. 2018 ، 33 ، 613-620. [ Google Scholar ] [ CrossRef ]
- اولوفسون، ک. هولمگرن، جی. Olsson، H. اندازه گیری ساقه و ارتفاع درخت با استفاده از اسکن لیزری زمینی و الگوریتم RANSAC. Remote Sens. 2014 , 6 , 4323–4344. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نقشه برداری ملی زمین فنلاند؛ 2020. در دسترس آنلاین: https://www.maanmittauslaitos.fi/en/maps-and-spatial-data/expert-users/product-descriptions/topographic-database (در 23 آوریل 2021 قابل دسترسی است).
- سازمان زمین شناسی فنلاند . 2020. در دسترس آنلاین: https://www.gtk.fi/en/services/data-sets-and-online-services-geo-fi/map-services/ (در 23 آوریل 2021 قابل دسترسی است).
- یوسیتالو، جی. کااکوریوارا، تی. هااویستو، ام. استفاده از فناوری اسکن لیزری هوابرد در پیشبینی ظرفیت باربری جنگل پیتلند. کروات. جی. برای. مهندس 2012 ، 33 ، 329-337. [ Google Scholar ]
- پالاندر، تی. برگروث، جی. Kärhä, K. تکنولوژی بیل مکانیکی برای افزایش راندمان انرژی چوب و برداشت چوب خمیر. Biomass Bioenergy 2012 ، 40 ، 120-126. [ Google Scholar ] [ CrossRef ]
- نقشههای کانال جریان و مناطق مرطوب با وضوح بالا Arp، PA: ابزاری برای برنامهریزی بهتر عملیات جنگل. حفظ کنید. برای. مدیریت شبکه SFM Netw. Res. یادداشت 2009 ، 55 ، 1-6. [ Google Scholar ]
- شوناور، ام. هافمن، اس. ماک، جی. یانسن، م. Jaeger, D. مقایسه روشهای تست ترامکانیکی منتخب و شاخصهای کارتوگرافی برای پیشبینی شیارهای ناشی از ترافیک ماشین در طول عملیات نازکسازی برش. Forests 2021 , 12 , 113. [ Google Scholar ] [ CrossRef ]
- کامبی، ام. سرتینی، جی. نری، ف. مارکی، ای. تأثیر ترافیک سنگین بر خاک های جنگلی: بررسی. برای. Ecol. مدیریت 2015 ، 338 ، 124-138. [ Google Scholar ] [ CrossRef ]
- یوسیتالو، جی. آلا-ایلوماکی، ج. لیندمن، اچ. توییو، جی. سیرن، ام. ان برای. علمی 2020 ، 77 ، 42. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وگا-نیوا، دی جی؛ مورفی، PNC؛ کاستونگوای، ام. اوگیلوی، جی. Arp، PA یک مدل زمین مدولار برای تغییرات روزانه در قابلیت تردد جنگل خاک مخصوص ماشین. می توان. J. Soil Sci. 2009 ، 89 ، 93-109. [ Google Scholar ] [ CrossRef ]
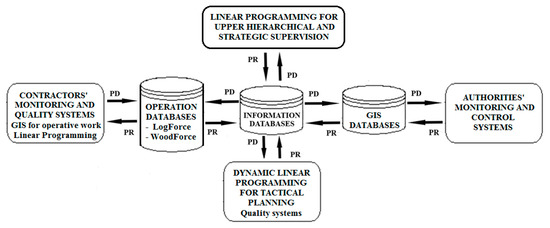
شکل 1. نمودار جریان اطلاعات برای مدیریت تدارکات چوب: PD = داده های برنامه ریزی. روابط عمومی = نتایج برنامه ریزی

شکل 2. فورودر و دروگر در حال استفاده در عملیات برداشت چوب در تابستان. منبع: John Deere Forestry Ltd.
شکل 3. نمودار جریان اطلاعات فضایی برداشت چوب مربوط به توسعه یک سیستم مدیریت کیفیت مبتنی بر GIS برای تهیه چوب.


بدون دیدگاه