

خلاصه
پوشش گیاهی کنار جاده می تواند بر عملکرد روشنایی نصب شده جاده تأثیر بگذارد. ما یک جریان کاری را نشان میدهیم که در آن از یک سیستم اندازهگیری سوار بر ماشین برای ارزیابی اثر انسداد نور پوشش گیاهی کنار جاده استفاده میشود. سیستم نقشه برداری سیار (MMS) شامل یک سیستم دوربین پانوراما، اسکنر لیزری، واحد اندازه گیری اینرسی و سیستم موقعیت یابی ماهواره ای است. گردش کار و سیستم اندازهگیری در سالهای 2015 و 2019 در بخش جادهای از Munkkiniemenranta، هلسینکی، فنلاند اعمال شد. توزیع درخشندگی نسبی روی سطح جاده و پوشش گیاهی مانع قبل و بعد از هرس پوشش گیاهی کنار جاده با استفاده از موبایل کالیبرهشده با روشنایی اندازهگیری شد. سیستم نقشه برداری تفاوت بین این دو اندازه گیری ارائه شده است و فرصت های ارائه شده توسط سیستم اندازه گیری روشنایی سه بعدی موبایل مورد بحث قرار می گیرد.
کلید واژه ها:
سیستم نقشه برداری موبایل ; اندازه گیری روشنایی ; روشنایی جاده ؛ پوشش گیاهی کنار جاده
1. معرفی
روشنایی جاده عمدتاً برای افزایش ایمنی ترافیک نصب می شود. روشنایی جاده می تواند تعداد تصادفات و تلفات را به میزان قابل توجهی کاهش دهد [ 1 ، 2 ، 3 ، 4 ، 5 ، 6 ، 7 ]. به عنوان مثال، در یک متاآنالیز توسط الویک [ 8 ]، روشنایی جاده به این نتیجه رسید که تصادفات منجر به مرگ را تا 65 درصد، تصادفات با جراحات را تا 30 درصد، و تصادفات را که فقط خسارت مالی دارند تا 15 درصد کاهش می دهد. علاوه بر این، همبستگی بین سرعت زیاد و عدم نصب روشنایی جاده پیدا شده است [ 9]. با این حال، نصب، نگهداری و استفاده روشنایی از هزینه های شهرداری است. علاوه بر این، نور اضافی یا آلودگی نوری برای ساکنان شهر و جانوران مضر است [ 10 ، 11 ]. از این رو، طراحی نور مناسب بسیار مهم است. روشنایی جاده بر اساس معیارهای خاص یا مقررات ملی نصب می شود که اغلب از یک گزارش فنی بین المللی مانند ANSI/IES RP-8-14 (موسسه ملی استانداردهای آمریکا/روش توصیه شده انجمن مهندسی روشنایی) یا CEN/TR (Comité Européen de Normalization/Technical) نصب می شود. گزارش) 13201:2015 [ 12 ، 13]. دو معیار مهم تنظیم شده یکنواختی کلی و یکنواختی طولی توزیع روشنایی سطح جاده است. معمولاً هنگام نصب روشنایی جاده یکنواختی مطلوب وجود دارد. با این حال، همانطور که پوشش گیاهی همسایه رشد می کند، روشنایی می تواند مسدود شود و یکنواختی حیاتی ایمنی در توزیع روشنایی به خطر بیفتد.
در محوطه سازی شهری، اثرات درختان و مناطق سبز تقریباً صرفاً مثبت در نظر گرفته می شود [ 14 ، 15 ]. عناصر سبز قطعا جذابیت فضاهای شهر را افزایش می دهند، سطح استرس ساکنان شهر را کاهش می دهند و پوششی را از آب و هوا یا نور مستقیم خورشید فراهم می کنند [ 16 ، 17 ، 18 ]. علاوه بر این، درختان و پوشش گیاهی شانس معرفی جانوران شهری مورد نظر را به محیط ساخته شده افزایش می دهد [ 19 ]. با این حال، درختان به عنوان موجودات زنده دائما در حال تغییر هستند. زمانی که پوشش گیاهی با زیرساختهای ایمنی حیاتی مانند روشنایی جاده مشترک باشد، میتواند مشکلاتی ایجاد کند.
سیستم های نقشه برداری متحرک به طور گسترده برای اندازه گیری سه بعدی جاده ها و محیط های ساخته شده [ 20 ، 21 ، 22 ، 23 ، 24 ]، جنگل ها و پوشش گیاهی [ 25 ] و به ویژه برای جمع آوری داده ها برای موجودی درختان شهری [ 26 ، 27 ] استفاده می شود. علاوه بر این، اندازهگیریهای درخشندگی در ابرهای نقطهای که به صورت زمینی و از پلتفرمهای تلفن همراه اسکن شدهاند ادغام شدهاند [ 28 ، 29 ، 30 ]. با این حال، سیستمهای نقشهبرداری روشنایی متحرک هنوز برای اندازهگیری تأثیری که هرس پوشش گیاهی کنار جاده بر درخشندگی سطح جاده دارد، استفاده نشده است.
هدف از این مطالعه نشان دادن جریان کاری است که در آن یک سیستم نقشه برداری متحرک به منظور ارزیابی اثر انسداد نور ناشی از پوشش گیاهی کنار جاده اعمال می شود. علاوه بر این، ما اندازه گیری می کنیم که انسداد چقدر بر توزیع روشنایی در سطح جاده تأثیر می گذارد. اثر انسداد با مقایسه یکنواختی درخشندگی سطح جاده قبل و بعد از هرس درختان کنار جاده ارائه میشود. اندازه گیری ها با استفاده از یک سیستم اسکن لیزری متحرک انجام شد و یکنواختی درخشندگی سطح جاده در سه بعدی تجزیه و تحلیل و مقایسه شد. علاوه بر این، داده ها به صورت جغرافیایی ارجاع داده شدند. در نهایت، مزایای اندازه گیری اثر انسداد نور پوشش گیاهی کنار جاده مورد بحث قرار می گیرد. این مقاله با ارائه یک رویکرد جدید و بین رشتهای برای بررسی ارتباط بین معیارهای درخشندگی سطح جاده و پوشش گیاهی مسدودکننده نور، که یک جنبه مهم در ایمنی ترافیک است، به بحث علمی کمک میکند. این رویکرد با مطالعه قابلیت استفاده که در بخشی از یک خیابان حومه شهر انجام شد، ارائه شده است. سهم این مقاله برانگیختن بحث علمی در مورد دو جنبه اصلی است. در ابتدا، ما میخواهیم استاندارد اندازهگیری درخشندگی و نحوه بازبینی آن را با ظهور روشهای اندازهگیری جدید مورد بحث قرار دهیم. در مرحله دوم، می خواهیم ایده اندازه گیری شبانه را به جامعه فناوری نقشه برداری موبایل معرفی کنیم. سهم این مقاله ارائه مثال ها و شواهد مفید در مورد این دو جنبه ذکر شده در بالا است. این رویکرد با مطالعه قابلیت استفاده که در بخشی از یک خیابان حومه شهر انجام شد، ارائه شده است. سهم این مقاله برانگیختن بحث علمی در مورد دو جنبه اصلی است. در ابتدا، ما میخواهیم استاندارد اندازهگیری درخشندگی و نحوه بازبینی آن را با ظهور روشهای اندازهگیری جدید مورد بحث قرار دهیم. در مرحله دوم، می خواهیم ایده اندازه گیری شبانه را به جامعه فناوری نقشه برداری موبایل معرفی کنیم. سهم این مقاله ارائه مثال ها و شواهد مفید در مورد این دو جنبه ذکر شده در بالا است. این رویکرد با مطالعه قابلیت استفاده که در بخشی از یک خیابان حومه شهر انجام شد، ارائه شده است. سهم این مقاله برانگیختن بحث علمی در مورد دو جنبه اصلی است. در ابتدا، ما میخواهیم استاندارد اندازهگیری درخشندگی و نحوه بازبینی آن را با ظهور روشهای اندازهگیری جدید مورد بحث قرار دهیم. در مرحله دوم، می خواهیم ایده اندازه گیری شبانه را به جامعه فناوری نقشه برداری موبایل معرفی کنیم. سهم این مقاله ارائه مثال ها و شواهد مفید در مورد این دو جنبه ذکر شده در بالا است. ما می خواهیم ایده اندازه گیری شبانه را به جامعه فناوری نقشه برداری موبایل معرفی کنیم. سهم این مقاله ارائه مثال ها و شواهد مفید در مورد این دو جنبه ذکر شده در بالا است. ما می خواهیم ایده اندازه گیری شبانه را به جامعه فناوری نقشه برداری موبایل معرفی کنیم. سهم این مقاله ارائه مثال ها و شواهد مفید در مورد این دو جنبه ذکر شده در بالا است.
2. مواد و روشها
2.1. منطقه و شرایط اندازه گیری
اندازه گیری های موبایل دو بار در خیابانی به نام Munkkiniemenranta در هلسینکی فنلاند انجام شد. Munkkiniemenranta جادهای آرام به طول 1 کیلومتر و برون شهری است. وقتی به سمت شمال غربی می روید، Munkkiniemenranta در سمت چپ پارک و ساحل دریا و در سمت راست نصب روشنایی جاده و حاشیه جاده با درختان قرار دارد. بیشتر درختان بلندتر از ارتفاع نصب چراغ ها (8.0 متر) بودند و در سال 2015، شاخه های درختان به شدت نور جاده را مسدود کردند. هر دو اندازهگیری در شب انجام شد، زمانی که سطح جاده فقط توسط چراغهای روشنایی جاده روشن شد. وسیله نقلیه اندازه گیری فقط با چراغ های پارکینگ روشن کار می کرد. از این رو، تأثیر خودرو بر درخشندگی سطح جاده ناچیز بود. از آنجایی که لامپها در طول هر دو اندازهگیری، چراغهای یکسانی بودند، هیچ تغییر قابل اندازهگیری در توزیع توان طیفی که بر اندازهگیری درخشندگی تأثیر بگذارد، وجود نداشت. علاوه بر این، توزیع درخشندگی سطح جاده اندازهگیری شده در معیارهای نسبی مقایسه شد. از این رو، تأثیر تیره شدن یا پیری لامپ ها نیز ناچیز بود. شرایط روی سطح جاده در طول هر دو اندازه گیری خشک بود و تأثیر روشنایی پس زمینه از محیط اطراف ناچیز بود. اثر کم نور یا پیری لامپ ها نیز ناچیز بود. شرایط روی سطح جاده در طول هر دو اندازه گیری خشک بود و تأثیر روشنایی پس زمینه از محیط اطراف ناچیز بود. اثر کم نور یا پیری لامپ ها نیز ناچیز بود. شرایط روی سطح جاده در طول هر دو اندازه گیری خشک بود و تأثیر روشنایی پس زمینه از محیط اطراف ناچیز بود.
اولین اندازه گیری در سپتامبر 2015 و دومین اندازه گیری در آوریل 2019 انجام شد. در تابستان 2018، درختان در امتداد Munkkiniemenranta توسط شهرداری هلسینکی هرس شدند. پنج بخش از خیابان برای تجزیه و تحلیل درخشندگی سطح انتخاب شد. هر بخش هنگام حرکت در جهت شمال غربی، خط سمت راست بود. از نظر طولی، هر بخش مساحت بین دو چراغ مجاور بود. این بخش ها مجاور بودند و در صورت ترکیب، ناحیه ای از خط سمت راست را بین شش چراغ متوالی ایجاد می کردند. شکل 1 مساحت اندازه گیری تقسیم شده به بخش های جاده (A-E) را نشان می دهد. لامپ ها در منطقه اندازه گیری، لامپ های LED AEC Illuminazione 8450 لومن با فاصله نصب طولی 33 متر بودند.
2.2. سیستم اندازه گیری و پردازش داده ها
سیستم نقشه برداری سیار (MMS) مورد استفاده Trimble MX2 بود که یک سیستم اندازه گیری روی وسیله نقلیه و موقعیت جغرافیایی است که فوتومتری پانوراما و اسکن لیزری را ترکیب می کند. در Trimble MX2، موقعیت جغرافیایی توسط سیستم GNSS-Inertial Trimble AP20 انجام می شود و ابر نقطه با دو سر لیزر SLM-250 کلاس 1 اسکن می شود که می تواند 72000 امتیاز در ثانیه جمع آوری کند. برد اسکن لیزری تا 250 متر است و به گفته سازنده، دقت محدوده زیرسیستم اسکن لیزری 1 ± سانتی متر در 50 متر برای کارت سفید Kodak است [ 32 ]. با این حال، دقت دامنه در محیط تجربی ما اندازهگیری یا ارزیابی نشد.
در اندازه گیری های اول و دوم، درخشندگی سطح جاده به ترتیب با سیستم های دوربین پانوراما Ladybug3 و Ladybug5 اندازه گیری شد. هر دو سیستم دوربین تحت شرایط آزمایشگاهی با استفاده از Optronic Laboratories Inc.، مدل 455-6-1 برای روشنایی مرجع و طیف سنج Konica Minolta CS-2000 به عنوان درخشندگی سنج [ 33 ] کالیبره شده بودند. مقادیر درخشندگی از مقادیر دوربین R (قرمز)، G (سبز) و B (آبی) با فاکتور بدست آمده در کالیبراسیون و معادله (1) از استاندارد IEC [ 34 ] تفسیر شد:
L r = 0.2126R + 0.7152G + 0.0722B
در حین اندازه گیری، تصاویر در فواصل 2 متری گرفته شد و حداکثر سرعت اندازه گیری 10 متر بر ثانیه بود. در پردازش پست، مقادیر RGB تصویر (قرمز، سبز، آبی) در ابر نقطه اسکن شده لیزری با تفسیر بصری ویژگیهای ابر نقطه هنگام قرار گرفتن بر روی تصاویر ثبت شد. این روش جهت گیری تعاملی نامیده می شود [ 35 , 36 , 37 , 38]. روش جهت گیری تعاملی ابتدا برای داده های جمع آوری شده در طول روز به منظور به دست آوردن تنظیمات جهت گیری برای داده های شبانه استفاده شد. در نهایت، مقادیر RGB به عنوان مقادیر روشنایی مطلق با استفاده از رابطه (1) و یک ثابت کالیبراسیون مخصوص دوربین محاسبه شد و به عنوان یک اسکالر برای هر نقطه ابر نقطه ثبت شد. میانگین تراکم نقطه در سطح جاده 1450 نقطه در هر متر مربع بود.
برای کاهش نویز، مقادیر درخشندگی سطح جاده تجزیه و تحلیل شده با قطر 1.0 متر فیلتر شد. از این رو، هر نقطه دارای مقدار درخشندگی متوسط در بین نقاطی در فاصله 0.5 متری از خود بود. ما انتخاب کردیم که از معیارهای یکنواختی کلی، U o و یکنواختی طولی، U i برای توصیف کیفیت نور استفاده کنیم. U o نسبت بین کمترین روشنایی و متوسط روشنایی در بخش جاده است و U iنسبت کمترین روشنایی به بالاترین درخشندگی در خط مرکزی خط اندازه گیری شده است. توضیحات مربوط به این اندازهگیریها از گزارش فنی CEN اروپا برای روشنایی جادهها است و در مقررات روشنایی جاده فنلاند استفاده میشود [ 13 ]. علاوه بر این، هر دوی این اقدامات، معیارهای نسبی هستند. بنابراین، آنها را می توان با وجود کاهش خروجی شار نور وابسته به سن در لامپ ها مقایسه کرد. منطقه اندازه گیری در جاده Munkkiniemenranta طبق مقررات طراحی روشنایی جاده فنلاند به عنوان جاده کلاس ME5 طبقه بندی می شود. در کلاس ME5، مقادیر هدف برای U o و U i به ترتیب 0.35 و 0.40 است.
تغییر در میزان پوشش گیاهی نورگیر بین سالهای 2015 و 2019 با استفاده از یک شبکه وکسل ارزیابی شد. برای هر بخش جاده A-E، فضای بین سطح جاده و ارتفاع نصب منابع نور از ابر نقطه برای تجزیه و تحلیل برش داده شد. برای هر ابر نقطه فرعی، یک شبکه وکسل ایجاد شد. شبکه voxel با استفاده از یک برنامه Python ایجاد شد. این برنامه ابتدا مرزهای ابر نقطه زیربخش را جستجو کرد و یک کادر مرزی ایجاد کرد. سپس این جعبه مرزی به وکسل هایی با طول لبه انتخابی تقسیم شد. شبکه وکسل با ابر نقطه فرعی پر شد و سپس شبکه وکسل به طور سیستماتیک از طریق وکسل به وکسل مرور شد. اگر یک وکسل حاوی هر تعداد نقطه باشد، به آن مقدار باینری 1 اختصاص داده می شود. و اگر یک وکسل فاقد نقطه باشد، مقدار دودویی 0 به آن اختصاص داده می شود. به عبارت دیگر، آستانه اشغال برای وکسل هایی که مسدود کننده نور در نظر گرفته می شدند، یک بود و تعداد ووکسل های مسدود کننده بین سطح جاده و ارتفاع منبع نور، معیار انسداد بود. در نهایت، تعداد وکسل های مسدود شده از سال 2015 و سال 2019 مقایسه شد. اندازهگیری حجم یا زیست توده پوشش گیاهی با اسکن لیزری به طور گسترده مورد مطالعه قرار گرفته است و بسته به کاربرد اندازهگیری، اندازههای وکسل مختلفی پیشنهاد میشود. آستانه اشغال برای وکسل هایی که مسدود کننده نور در نظر گرفته می شدند یک بود و تعداد وکسل های مسدود کننده بین سطح جاده و ارتفاع منبع نور معیار انسداد بود. در نهایت، تعداد وکسل های مسدود شده از سال 2015 و سال 2019 مقایسه شد. اندازهگیری حجم یا زیست توده پوشش گیاهی با اسکن لیزری به طور گسترده مورد مطالعه قرار گرفته است و بسته به کاربرد اندازهگیری، اندازههای وکسل مختلفی پیشنهاد میشود. آستانه اشغال برای وکسل هایی که مسدود کننده نور در نظر گرفته می شدند یک بود و تعداد وکسل های مسدود کننده بین سطح جاده و ارتفاع منبع نور معیار انسداد بود. در نهایت، تعداد وکسل های مسدود شده از سال 2015 و سال 2019 مقایسه شد. اندازهگیری حجم یا زیست توده پوشش گیاهی با اسکن لیزری به طور گسترده مورد مطالعه قرار گرفته است و بسته به کاربرد اندازهگیری، اندازههای وکسل مختلفی پیشنهاد میشود.39 , 40 , 41 , 42 , 43 , 44 , 45 , 46 , 47 , 48 ]. در این مطالعه، ما تصمیم گرفتیم وکسلهای مکعبی را با طول لبههای 0.02 متر، 0.05 متر، 0.10 متر و 0.40 متر آزمایش کنیم تا ارزیابی کنیم که اندازه سلول وکسل چگونه بر محاسبه پوشش گیاهی مسدود شده تأثیر میگذارد. هنگام اندازه گیری حجم پوشش گیاهی یا زیست توده، انسداد اغلب یک چالش است. اما در مطالعه ما، انسداد دقیقاً همان پدیده ای است که می خواهیم اندازه گیری کنیم و محاسبه ای که در بالا توضیح داده شد برای تخمین لایه های پوشش گیاهی مناسب می دانیم.
در این مطالعه، برشبندی ابر نقطهای به صورت دستی در نرمافزار ویرایش ابر نقطهای CloudCompare انجام شد. ما توانستیم هر نقطه در فضای بین منبع نور و سطح خط را به عنوان پوشش گیاهی تشخیص دهیم، زیرا این منطقه آزمایشی توسط ما در محل مشاهده شد. ما تشخیص دادیم که تنها ویژگی های مسدود کننده روشنایی در منطقه اندازه گیری، شاخه های درخت بودند. برای مناطق بزرگ، تشخیص خودکار پوشش گیاهی باید در نظر گرفته شود [ 49 ، 50 ، 51 ، 52]. با این حال، برای این مطالعه، این روش دستی قابل استفاده بود، زیرا هدف اصلی ما این بود که به سادگی شناسایی کنیم که آیا هر نوع همبستگی بین توزیع روشنایی سطح جاده و تعداد وکسلهای مسدود شده بین ارتفاع نصب لامپ و سطح جاده وجود دارد یا خیر. برای شفافسازی، مقادیر درخشندگی در هیچ نقطهای به یا از شبکه وکسل محاسبه نشد. مهندسی روشنایی اندازه گیری یکنواختی کلی روشنایی و یکنواختی درخشندگی طولی از اندازه گیری های MMS محاسبه شد. هر دوی این معیارهای یکنواختی روشنایی به یک مقدار نسبی واحد برای هر بخش جاده کاهش مییابد که سطح جاده بین دو چراغ مجاور است. شبکه وکسل فقط برای نقاط مسدود کننده ایجاد شد و تعداد وکسل های مسدود کننده معیار انسداد برای هر بخش جاده در نظر گرفته شد. که فضای بین دو چراغ مجاور است. سپس یکنواختی درخشندگی و اقدامات انسداد مقایسه شد.
3. نتایج
3.1. یکنواختی درخشندگی کلی و طولی
مقادیر اندازه گیری شده برای U o و U i قبل از (2015) و بعد از (2019) هرس پوشش گیاهی کنار جاده در جدول 1 ارائه شده است.
شکل 2 مقادیر درخشندگی شبه رنگی را در سطح جاده برای کل منطقه اندازه گیری قبل از (2015) و پس از (2019) هرس درخت نشان می دهد.
شکل 3 تصویری از پوشش گیاهی اندازه گیری شده را مستقیماً از سمت ناحیه اندازه گیری و از مورب بالای منطقه اندازه گیری نشان می دهد. در ابرهای نقطهای اسکن شده با لیزر قبل از هرس، شاخههای پایینتر اسکنهای لیزری بیشتری را مسدود میکنند و سایبان نقشهبرداری نمیشود. برعکس، اسکن لیزر پس از هرس به شاخه های بالایی نفوذ می کند. واضح تر، شاخه های پایین تر حذف شده و درختان پر را می توان به راحتی هنگام مقایسه ابرهای نقطه قدیمی و جدید تشخیص داد.
3.2. انسداد آنالیز وکسل
جدول 2 تعداد وکسل هایی را که پوشش گیاهی مسدود کننده نور را برای اندازه گیری های انجام شده قبل از (2015) و پس از (2019) هرس درختان کنار جاده ای در بر می گیرد، نشان می دهد. علاوه بر این، جدول 2 تغییر نسبی در تعداد وکسلهایی را که پوشش گیاهی مسدودکننده نور را در بین اندازهگیریهای انجامشده در سالهای 2015 و 2019 در بر میگیرد، نشان میدهد. همه اعداد وکسل برای بخشهای جاده A-E، و برای وکسلهای مکعبی با طول لبهها ارائه شدهاند. 0.02، 0.05، 0.1، و 0.4 متر.
با افزایش اندازه وکسل، تعداد وکسلهایی که حداقل یک نقطه پوشش گیاهی اسکن شده دارند، کاهش مییابد.
3.3. وکسل های مسدود و مقایسه یکنواختی درخشندگی
جدول 3 قدر مطلق درصد تغییر در یکنواختی کلی، یکنواختی طولی، و تعداد وکسل های مسدود شده بین اندازه گیری های انجام شده در سال 2015 و 2019 برای هر بخش جاده A-E را نشان می دهد. شکل 4 همان مقادیر یک نمودار ستونی را نشان می دهد.
کاهش وکسل های پوشش گیاهی با مقادیر یکنواختی درخشندگی بهبود یافته برای بخش های جاده A-D ارتباط دارد. برای بخش جاده E، حذف پوشش گیاهی نیز با بهبود یکنواختی روشنایی ارتباط دارد، اما نه به همان نسبت با بخش های جاده A-D. این ممکن است با این واقعیت توضیح داده شود که در ابتدا در اندازه گیری سال 2015 پوشش گیاهی مسدود کننده بسیار کمی وجود داشت و همه آن ها قبل از اندازه گیری سال 2019 حذف شدند. از این رو، تعداد نسبی وکسلهای حذف شده که پوشش گیاهی را در بر میگیرد، 100٪ بود، حتی اگر فضای زیادی برای بهبود در مقادیر یکنواختی درخشندگی وجود نداشت.
4. بحث
در این مطالعه، ما یک سیستم اندازهگیری و یک گردش کار را برای ارزیابی اثر مسدودکننده روشنایی جادهای از پوشش گیاهی کنار جاده ارائه کردیم. به طور خاص، موردی را توصیف کردیم که در آن از یک جریان کاری شامل تجزیه و تحلیل تغییر معیارهای درخشندگی سطح جاده برای یکنواختی کلی و یکنواختی طولی اندازهگیری شده قبل و بعد از هرس پوشش گیاهی کنار جاده استفاده کردیم. با استفاده از گردش کار توسعهیافته، ما بهبود یکنواختی درخشندگی کلی و طولی سطح جاده را پس از هرس پوشش گیاهی تأیید کردیم.
نویسندگان سیستم ارائه شده را یک ابزار عالی برای اندازه گیری روشنایی جاده می دانند. در مقایسه با اندازهگیریهای ایستا، اندازهگیری موبایل امکان پوشش سریع و ضبط دادههای کل جادهها یا خیابانهای بزرگ را فراهم میکند. با سیستم ارائه شده، نتیجه یک ابر نقطه روشنایی سه بعدی است. مدلهای درخشندگی سهبعدی به طور غیرقابل انکاری نسبت به تصاویر روشنایی دو بعدی معمولی متنوعتر هستند. هر نقطه درخشندگی اندازهگیری شده به صورت جغرافیایی ارجاع داده شده و در مقیاس است، که با نورسنجی درخشندگی تصویربرداری دوبعدی امکانپذیر نیست. برای مورد خاص در این مطالعه – تأیید بهبود یکنواختی روشنایی سطح جاده – سیستم اندازه گیری ارائه شده بسیار خوب عمل کرد. علاوه بر این، مقدار پوشش گیاهی حذف شده بین سالهای 2015 و 2019 با استفاده از شبکه وکسل مورد تجزیه و تحلیل قرار گرفت. مقدار پوشش گیاهی حذف شده با یکنواختی کلی روشنایی بهبود یافته و مقادیر یکنواختی طولی مقایسه شد. یک همبستگی بین این معیارها پیدا شد. با این حال، تحقیقات بیشتری برای تأیید همبستگی مورد نیاز است. علاوه بر این، ما یک روش دستی برای برش ابر نقطه و شناسایی وکسل مسدود شده اعمال کردیم. روش دستی برای مطالعه قابلیت استفاده ما در یک منطقه محدود قابل مدیریت بود. برای برنامه های کاربردی نقشه برداری موبایل، این روش های دستی امکان پذیر نیستند و اتوماسیون باید هم برای تشخیص پوشش گیاهی و هم برای تقسیم منطقه اندازه گیری شده در نظر گرفته شود. برای تشخیص پوشش گیاهی و استخراج ویژگی، ابزارهای یادگیری ماشینی مانند ماشینهای بردار پشتیبان، شبکههای مارکوف انجمنی، یا طبقهبندی نظارت شده میتوانند اعمال شوند. یک همبستگی بین این معیارها پیدا شد. با این حال، تحقیقات بیشتری برای تأیید همبستگی مورد نیاز است. علاوه بر این، ما یک روش دستی برای برش ابر نقطه و شناسایی وکسل مسدود شده اعمال کردیم. روش دستی برای مطالعه قابلیت استفاده ما در یک منطقه محدود قابل مدیریت بود. برای برنامه های کاربردی نقشه برداری موبایل، این روش های دستی امکان پذیر نیستند و اتوماسیون باید هم برای تشخیص پوشش گیاهی و هم برای تقسیم منطقه اندازه گیری شده در نظر گرفته شود. برای تشخیص پوشش گیاهی و استخراج ویژگی، ابزارهای یادگیری ماشینی مانند ماشینهای بردار پشتیبان، شبکههای مارکوف انجمنی، یا طبقهبندی نظارت شده میتوانند اعمال شوند. یک همبستگی بین این معیارها پیدا شد. با این حال، تحقیقات بیشتری برای تأیید همبستگی مورد نیاز است. علاوه بر این، ما یک روش دستی برای برش ابر نقطه و شناسایی وکسل مسدود شده اعمال کردیم. روش دستی برای مطالعه قابلیت استفاده ما در یک منطقه محدود قابل مدیریت بود. برای برنامه های کاربردی نقشه برداری موبایل، این روش های دستی امکان پذیر نیستند و اتوماسیون باید هم برای تشخیص پوشش گیاهی و هم برای تقسیم منطقه اندازه گیری شده در نظر گرفته شود. برای تشخیص پوشش گیاهی و استخراج ویژگی، ابزارهای یادگیری ماشینی مانند ماشینهای بردار پشتیبان، شبکههای مارکوف انجمنی، یا طبقهبندی نظارت شده میتوانند اعمال شوند. روش دستی برای مطالعه قابلیت استفاده ما در یک منطقه محدود قابل مدیریت بود. برای برنامه های کاربردی نقشه برداری موبایل، این روش های دستی امکان پذیر نیستند و اتوماسیون باید هم برای تشخیص پوشش گیاهی و هم برای تقسیم منطقه اندازه گیری شده در نظر گرفته شود. برای تشخیص پوشش گیاهی و استخراج ویژگی، ابزارهای یادگیری ماشینی مانند ماشینهای بردار پشتیبان، شبکههای مارکوف انجمنی، یا طبقهبندی نظارت شده میتوانند اعمال شوند. روش دستی برای مطالعه قابلیت استفاده ما در یک منطقه محدود قابل مدیریت بود. برای برنامه های کاربردی نقشه برداری موبایل، این روش های دستی امکان پذیر نیستند و اتوماسیون باید هم برای تشخیص پوشش گیاهی و هم برای تقسیم منطقه اندازه گیری شده در نظر گرفته شود. برای تشخیص پوشش گیاهی و استخراج ویژگی، ابزارهای یادگیری ماشینی مانند ماشینهای بردار پشتیبان، شبکههای مارکوف انجمنی، یا طبقهبندی نظارت شده میتوانند اعمال شوند.48 ، 49 ، 50 ]. برای تقسیمبندی منطقه جاده، طبقهبندی بر اساس نزدیکی مختصات جادهای شناخته شده و تکنیکهای پردازش تصویر شطرنجی میتواند مفید باشد [ 51 ].
با این حال، سیستم ارائه شده خالی از کاستی نیست. اولاً، گرفتن تصویر از سیستم اندازه گیری ارائه شده به طور کامل از دستورالعمل های هیچ استاندارد اندازه گیری روشنایی جاده پیروی نمی کند. به طور طبیعی می توان MMS را برای پیروی از استانداردها تغییر داد. در این مطالعه، این نوع اصلاح چگالی نقطه و دقت ابر نقطه را به شدت کاهش می دهد. نویسندگان در نظر گرفتند که این امر ضد نوآوری است و تصمیم گرفتند از سیستم نقشه برداری موبایل در بالاترین تنظیمات ممکن برای شرایط استفاده کنند. به همین ترتیب، استاندارد اندازهگیری میتواند بهروزرسانی شود تا امکانات همهکاره نقشهبرداری سهبعدی موبایل را در بر گیرد. ثانیاً دینامیک و نسبت سیگنال به نویز دوربین های پانوراما MMS هنوز بهینه نیست و نمی تواند از این نظر با نورسنجی روشنایی تصویربرداری ثابت رقابت کند. با این حال، این فناوری ها به طور مداوم در حال بهبود هستند. نویسندگان به این نتیجه رسیدند که این فناوری به اندازه کافی توسعه یافته است تا یک مکالمه علمی در مورد اندازه گیری درخشندگی موبایل را آغاز کند. به زودی، تفاوت بین کیفیت اندازه گیری موبایل و استاتیک از نظر اندازه گیری روشنایی سطح جاده ناچیز خواهد بود.
در این تحقیق، هندسه محیط جاده صرفاً با اسکنر لیزری اندازه گیری شد و تصاویر دیجیتالی گرفته شده بر روی هندسه نمایش داده شد. پوشش گیاهی شهری نیز تنها با استفاده از فتوگرامتری مبتنی بر دوربین ترسیم شده است [ 53]. با این حال، جنبه های زیر استفاده از اسکن لیزری را تشویق می کند. اولا، یک اسکنر لیزری فواصل مطلق را اندازه گیری می کند، در حالی که داده های مبتنی بر دوربین فقط از نظر مقیاس نسبی هستند. ثانیاً، اسکنرهای لیزری حسگرهای فعالی هستند، به این معنی که می توانند هندسه را در شرایط تاریک اندازه گیری کنند، در حالی که فتوگرامتری مبتنی بر دوربین همیشه به یک منبع نور خارجی برای انتشار نور بر روی سطوح اندازه گیری شده نیاز دارد. به خصوص هنگام اندازه گیری در شرایط شبانه، اگر فقط از فتوگرامتری مبتنی بر دوربین استفاده شود، کیفیت اندازه گیری هندسه کاهش می یابد. گزینه سوم یک روش ترکیبی است که در آن هندسه با استفاده از اسکنرهای لیزری و فتوگرامتری مبتنی بر دوربین اندازه گیری می شود. این یک روش مطلوب برای اندازهگیری زمینی در روز محیطهای ساخته شده است [ 54]. قابلیتهای این روش ترکیبی باید در مطالعات آتی برای اندازهگیری محیطهای جادهای با نور مصنوعی مورد ارزیابی قرار گیرد.
مناطق سبز شهری، درختان و پوشش گیاهی در آینده بیشتر مورد تاکید و برجسته خواهند بود. اثر سایهزنی و کاهش دما پوشش گیاهی شهری به مقابله با اثرات تغییرات آب و هوایی کمک میکند [ 14 ، 55 ]. علاوه بر این، درختان ارزش دارایی را افزایش می دهند [ 56 ]، به طور بالقوه جرم را کاهش می دهند [ 57 ، 58 ] و کیفیت هوا را بهبود می بخشند [ 54 ]. از نظر زیرساخت های ترافیکی، انسداد روشنایی معابر تنها اثر منفی پوشش گیاهی کنار جاده نیست. رشد درختان نیز می تواند باعث آسیب به پیاده رو شود [ 59]. سیستم اندازهگیری ارائهشده در این مطالعه احتمالاً میتواند آسیبهای روسازی را نیز ترسیم کند و بنابراین، این دو اثر منفی ناشی از پوشش گیاهی شهری را با یک اندازهگیری اندازهگیری کند.
ظهور تجهیزات ارزان قیمت امکان استفاده از MLS را در تعداد فزاینده ای از برنامه ها افزایش می دهد. Jaakkola و همکاران [ 60 ] عملکرد سیستم های MLS مقرون به صرفه را نشان داده اند. کاهش اندازه و وزن سیستمهای MLS همچنین امکان نصب آنها بر روی پهپادها را فراهم کرده است و به طور بالقوه دیدگاه کمتری از محیط شهری را ارائه میدهد. سیستمهای MLS بسیار قابل حمل نیز میتوانند توسط عابران پیاده مورد استفاده قرار گیرند و انعطافپذیری آنها را افزایش دهند [ 61 ]]. سیستم هایی که بر اصل SLAM متکی هستند همچنین می توانند در مناطق مسدود شده GNSS کار کنند. این پیشرفتها به طور بالقوه کاربرد نقشهبرداری روشنایی مبتنی بر MLS را در تونلها، سطوح زیرین پلها، مناطق عابر پیاده و غیره، بسته به عملکرد و مناسب بودن سنسورهای تصویربرداری در این سیستمها، گسترش میدهند. همانطور که نقشه برداری و تصویربرداری سه بعدی در سیستم های نزدیک به سطح مصرف کننده نیز نشان داده شده است، همچنین می توان استدلال کرد که تا حدی نگاشت درخشندگی نیز می تواند از طریق یک رویکرد جمع سپاری در مناطق عابر پیاده انجام شود.
نقشه برداری از پوشش گیاهی کنار جاده علاوه بر ارزیابی روشنایی جاده، کاربردهای مختلفی دارد. برخورد گوزنها، گوزنها و گوزنها با پوشش گیاهی کنار جاده ارتباط دارد، زیرا آنها در حال جستجوی سایتهایی برای Cervidae هستند [ 62 ]. از سوی دیگر، مشخص شده است که پوشش گیاهی کنار جاده باعث کاهش ناامیدی و پرخاشگری در رانندگان می شود [ 63 ]. علاوه بر این، درختان کنار جاده پتانسیل کاهش آلودگی نوری ناشی از لامپ های خیابان را دارند [ 64 ]. با توجه به نتیجه مثبت، پوشش گیاهی کنار جاده تا زمانی که بتوان آن را کنترل کرد ترجیح داده می شود. سیستم اندازه گیری ارائه شده در این مطالعه یک ابزار بهینه برای کنترل است.
5. نتیجه گیری ها
این مطالعه یک برنامه جدید و خاص را برای یک سیستم نقشه برداری موبایل نشان داد. روش ارائه شده می تواند تأثیر مستقیمی بر ایمنی ترافیک و بهره وری انرژی داشته باشد زیرا می توان روشنایی جاده را بهبود بخشید و پوشش گیاهی کنار جاده را با توجه به اندازه گیری ها بازسازی کرد. علاوه بر این، این مطالعه به روندهای فناوری مانند نقشههای معنایی سه بعدی با کیفیت بالا و حتی وسایل نقلیه خودمختار مرتبط است، زیرا وسایل نقلیه خودمختار میتوانند به طور مداوم دادهها را برای تجزیه و تحلیل پوشش گیاهی و درخشندگی جمعآوری کنند. نقشه برداری موبایل و فناوری های تصویربرداری دیجیتال به طور اجتناب ناپذیری بهبود خواهند یافت. به همین ترتیب، شهرنشینی سریع تقاضاهای بیشتری را برای نقشه های سه بعدی معنایی ایجاد می کند. بیشتر نقشه برداری موبایل در طول روز انجام می شود. اندازه گیری روشنایی جاده یکی از انگیزه های نقشه برداری موبایل در شب است. همزمان با اندازه گیری روشنایی، محیط شهری شبانه اندازه گیری می شود و از این اندازه گیری کلی تر می توان برای ایجاد مدل های شبانه سه بعدی از محیط شهری استفاده کرد. با این حال، توجه به این نکته مهم است که این روندهای فناوری می توانند از طریق مسیرهای تکمیلی تکامل یابند. هدف نهایی برای مدلهای شهر سهبعدی بهروز شده در زمان واقعی که نشاندهنده دادههای روشنایی دقیق در میان سایر اطلاعات معنایی قابل تصور است، به تدریج محقق خواهد شد.
منابع
- پین، دی.ام. Fenske, JC تحلیلی از میزان تصادفات، جراحات و تلفات در شرایط نوری مختلف: مطالعه پاسخ اضطراری میشیگان در مورد تعقیبهای پلیس ایالتی. پلیس 1997 ، 20 ، 357-373. [ Google Scholar ] [ CrossRef ]
- اویا، اچ. آندو، ک. کانوشیما، HA تحقیق در مورد رابطه بین روشنایی در تقاطع ها و کاهش تصادفات رانندگی. J. Light Vis. محیط زیست 2002 ، 26 ، 29-34. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پلینیس، اس. موری، آی جی; Pallikaris، تلفات ترافیک جاده ای IG: درک آمار تلفات شبانه Inj. قبلی 2006 ، 12 ، 125-138. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- سالیوان، جی.ام. Flannagan، MJ تعیین مزیت ایمنی بالقوه بهبود روشنایی در سه سناریوی تصادف عابر پیاده. اسید. مقعدی قبلی 2007 ، 39 ، 638-647. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Wanvik، PO اثرات روشنایی جاده: تجزیه و تحلیل بر اساس آمار تصادف هلندی 1987-2006. اسید. مقعدی قبلی 2009 ، 41 ، 123-128. [ Google Scholar ] [ CrossRef ]
- جکت، ام. فریت، دبلیو. تعیین کمیت تأثیر روشنایی جاده بر ایمنی جاده – مطالعه نیوزلند. IATSS Res. 2013 ، 36 ، 139-145. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یانیس، جی. کندیلی، ع. Mitzalis, N. تأثیر روشنایی بر فراوانی و شدت تصادفات جاده ای. Proc. Inst. مدنی مهندس ترانسپ 2013 ، 166 ، 271-281. [ Google Scholar ] [ CrossRef ]
- الویک، آر. متاآنالیز ارزیابی های روشنایی عمومی به عنوان اقدام متقابل حادثه. ترانسپ Res. ضبط 1995 ، 1485 ، 12-24. [ Google Scholar ]
- دی بلیس، ای. شولت-مکلنبک، ام. بروکز، دبلیو. هرمان، ا. هرتویگ، آر. عجله کور: با کاهش نور، سرعت افزایش می یابد. PLoS ONE 2018 , 13 , e0188951. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هولکر، اف. ماس، تی. گریفهن، بی. کلواس، دبلیو. Voigt، CC; هنکل، دی. هانل، ا. کاپلر، PM; وولکر، اس. شووپ، آ. و همکاران سمت تاریک نور: دستور کار تحقیقاتی فرا رشته ای برای سیاست آلودگی نوری Ecol. Soc. 2010 ، 15 ، 13. [ Google Scholar ] [ CrossRef ]
- رودریگز، آ. بورگان، جی. دان، پی. جسوپ، آر. سیاه پوست، جی جی. Chiaradia، A. کشش کشنده آب های برشی دم کوتاه به نورهای مصنوعی. PLoS ONE 2014 ، 9 ، e110114. [ Google Scholar ] [ CrossRef ]
- انجمن مهندسی روشنگر آمریکای شمالی. ANSI/IES RP-8-14، روشنایی جاده ؛ انجمن مهندسی روشنگر آمریکای شمالی: نیویورک، ایالات متحده آمریکا، 2014; شابک 978-0-87995-299-0. [ Google Scholar ]
- کمیته استانداردسازی اروپا (CEN). CEN-EN 13201-3، روشنایی جاده—بخش 3: محاسبه عملکرد . کمیته اروپایی استانداردسازی (CEN): بروکسل، بلژیک، 2015. [ Google Scholar ]
- پیتمن، SD; دانیلز، CB; زیرساخت سبز Ely، ME به عنوان پشتیبان زندگی: طبیعت شهری و تغییرات آب و هوایی. ترانس. R. Soc. اس. اوست. 2015 ، 139 ، 97-112. [ Google Scholar ] [ CrossRef ]
- Nieuwenhuijsen، MJ; خریس، ح. تریگورو-ماس، ام. گاسکون، ام. دادوند، ص پنجاه سایه سبز. اپیدمیولوژی 2017 ، 28 ، 63-71. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- چانگ، CR; لی، MH اثرات پارک های شهری بر محیط حرارتی شهری محلی. شهری برای. سبز شهری. 2014 ، 13 ، 672-681. [ Google Scholar ] [ CrossRef ]
- السادک، م. لیو، بی. لیان، ز. Xie، J. تأثیر درختان کنار جاده شهری و محیط فیزیکی آنها بر اقدامات کاهش استرس: یک آزمایش میدانی در شانگهای. شهری برای. سبز شهری. 2019 ، 42 ، 51-60. [ Google Scholar ] [ CrossRef ]
- هوانگ، Q. یانگ، م. جین، HA; لی، اس. بائر، N. درختان، چمن، یا بتن؟ تاثیر انواع محیط ها بر کاهش استرس Landsc. طرح شهری. 2020 ، 193 ، 103654. [ Google Scholar ] [ CrossRef ]
- Threlfall، CG; ویلیامز، NS; Hahs، AK; رویکردهای Livesley، SJ به مدیریت پوشش گیاهی شهری و تأثیرات آن بر مجموعه پرندگان و خفاش های شهری. Landsc. طرح شهری. 2016 ، 153 ، 28-39. [ Google Scholar ] [ CrossRef ]
- جااکولا، ا. Hyyppä، J.; هایپا، اچ. Kukko، A. الگوریتم های بازیابی برای مدل سازی سطح جاده با استفاده از نقشه برداری موبایل مبتنی بر لیزر. Sensors 2008 , 8 , 5238-5249. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لهتوماکی، ام. جااکولا، ا. Hyyppä، J.; کوکو، ا. کارتینن، اچ. تشخیص اشیاء عمودی مانند قطب در یک محیط جاده با استفاده از دادههای اسکن لیزری مبتنی بر وسیله نقلیه. Remote Sens. 2010 , 2 , 641-664. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کابو، سی. کوکو، ا. گارسیا-کورتس، اس. کارتینن، اچ. Hyyppä، J.; Ordoñez, C. الگوریتمی برای ترسیم خودکار لبه آسفالت جاده از داده های اسکنر لیزری سیار با استفاده از مفهوم ابرهای خط. Remote Sens. 2016 , 8 , 740. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جوانمردی، م. جوانمردی، ا. گو، ی. Kamijo، S. به سمت نقشه برداری شهری سه بعدی با کیفیت بالا: ثبت سیستم های نقشه برداری موبایل و تصاویر هوایی مبتنی بر ویژگی جاده. Remote Sens. 2017 , 9 , 975. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بالادو، ج. گونزالس، ای. آریاس، پ. کاسترو، دی. رویکرد جدید به فهرست خودکار علائم ترافیکی بر اساس داده های سیستم نقشه برداری موبایل و یادگیری عمیق. Remote Sens. 2020 , 12 , 442. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هولوپاینن، م. کانکاره، وی. واستارانتا، م. لیانگ، ایکس. لین، ی. واجا، MT; یو، ایکس. Hyyppä، J.; هایپا، اچ. کارتینن، اچ. و همکاران نقشه برداری درخت با استفاده از اسکن لیزری هوابرد، زمینی و سیار – مطالعه موردی در یک جنگل شهری ناهمگن شهری برای. سبز شهری. 2013 ، 12 ، 546-553. [ Google Scholar ] [ CrossRef ]
- دل کامپو-سانچز، آ. مورنو، ام. بالستروس، آر. هرناندز-لوپز، دی. خصوصیات هندسی انگور از ابرهای نقطه سه بعدی به دست آمده با سیستم های اسکنر لیزری. Remote Sens. 2019 , 11 , 2365. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هولوپاینن، م. واستارانتا، م. کانکاره، وی. کانتولا، تی. کارتینن، اچ. کوکو، ا. واجا، MT; Hyyppä، J.; Hyyppä، H. اسکن لیزری زمینی سیار در موجودی درخت شهری. در مجموعه مقالات یازدهمین کنفرانس بینالمللی برنامههای LiDAR برای ارزیابی اکوسیستمهای جنگلی (SilviLaser 2011)، هوبارت، استرالیا، 16 تا 20 اکتبر 2011. [ Google Scholar ]
- وو، جی. یائو، دبلیو. Polewski، P. نقشه برداری از گونه های درختی منفرد و سرزندگی در امتداد راهروهای جاده شهری با LiDAR و سنسورهای تصویربرداری: چگالی نقطه در مقابل دیدگاه دید. Remote Sens. 2018 ، 10 ، 1403. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- واجا، MT; کورکلا، م. ویرتانن، جی.-پی. ماکسیمینن، م. هایپا، اچ. Hyyppä، J.; ابرهای نقطه سه بعدی تتری، E. درخشندگی تصحیح شده برای محیطهای جاده و خیابان. Remote Sens. 2015 ، 7 ، 11389–11402. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- واجا، MT; کورکلا، م. ماکسیمینن، م. ویرتانن، جی.-پی. کوکو، ا. Lehtola، VV; Hyyppä، J.; Hyyppä، H. نقشه برداری سیار از شرایط روشنایی محیط جاده در شب. فتوگرام J. فنلاند 2018 ، 26 ، 1-7. [ Google Scholar ] [ CrossRef ]
- Helsingin Karttapalvelu (سرویس نقشه هلسینکی). در دسترس آنلاین: https://kartta.hel.fi (در 18 مارس 2020 قابل دسترسی است).
- سیستم نقشه برداری موبایل Trimble MX2. در دسترس آنلاین: https://www.webcitation.org/6sc5p4MvX (در 18 مارس 2020 قابل دسترسی است).
- کورکلا، م. ماکسیمینن، م. واجا، MT; ویرتانن، جی.-پی. کوکو، ا. Hyyppä، J.; Hyyppä، H. آماده سازی دوربین و عملکرد برای نقشه برداری روشنایی سه بعدی محیط های جاده. فتوگرام J. فنلاند 2017 ، 25 ، 1-23. [ Google Scholar ] [ CrossRef ]
- کمیسیون بین المللی الکتروتکنیکی سیستمها و تجهیزات چندرسانهای – اندازهگیری و مدیریت رنگ – بخش ۲-۱: مدیریت رنگ – فضای رنگی RGB پیشفرض – sRGB ; IEC 61966-2-1; کمیسیون بین المللی الکتروتکنیکی: ژنو، سوئیس، 1999. [ Google Scholar ]
- باربر، دی. میلز، جی. برایان، اسکن لیزری PG و فتوگرامتری – مترولوژی قرن 21. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2002 ، 34 ، 360-366. [ Google Scholar ]
- رونهولم، پی. هونکوارا، ای. لیتکی، پی. هایپا، اچ. Hyyppä, J. ادغام اسکن لیزری و فتوگرامتری. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2007 ، 36 ، 355-362. [ Google Scholar ]
- عبدالحافظ، ع. ریدل، بی. Niemeier, W. به سمت یک فضای رنگی واقعی سه بعدی با ادغام ابر نقطه اسکنر لیزری و عکس های دیجیتال. در مجموعه مقالات کارگروه ISPRS V/4 کارگاه آموزشی 3D–ARCH 2005، Mestre-Venice، ایتالیا، 22-24 اوت 2005. [ Google Scholar ]
- رونهولم، پی. هایپا، اچ. Hyyppä، J.; هاگرن، اچ. جهتیابی ابرهای نقطهای اسکن لیزری هوابرد با بلوکهای تصویری چندمقیاسی. Sensors 2009 , 9 , 6008-6027. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Moskal, LM; ژنگ، جی. بازیابی متغیرهای موجودی جنگل با اسکن لیزری زمینی (TLS) در جنگل ناهمگن شهری. Remote Sens. 2012 ، 4 ، 1-20. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هاگلین، ام. آستروپ، آر. گوباکن، تی. Næsset، E. تخمین زیست توده تک شاخه درخت صنوبر نروژ با اسکن لیزری زمینی با استفاده از ویژگیهای بعد وکسل و تاج. Scand. جی. برای. Res. 2013 ، 28 ، 456-469. [ Google Scholar ] [ CrossRef ]
- وو، بی. یو، بی. یو، دبلیو. شو، اس. تان، دبلیو. هو، سی. هوانگ، ی. وو، جی. لیو، اچ. یک روش مبتنی بر وکسل برای شناسایی خودکار و تخمین پارامترهای مورفولوژیکی درختان خیابان منفرد از دادههای اسکن لیزری سیار. Remote Sens. 2013 ، 5 ، 584-611. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یائو، دبلیو. فن، اچ. تشخیص خودکار درختان منفرد سه بعدی در امتداد راهروهای جاده شهری توسط سیستمهای اسکن لیزری سیار. در مجموعه مقالات سمپوزیوم بین المللی فناوری نقشه برداری موبایل، تاینان، تایوان، 6 مه 2013. [ Google Scholar ]
- بینرت، آ. هس، سی. ماس، HG; فون اوهایمب، جی. تکنیکی مبتنی بر وکسل برای تخمین حجم درختان از دادههای اسکنر لیزری زمینی. در مجموعه مقالات آرشیو بین المللی فتوگرامتری، سنجش از راه دور و کمیسیون علوم اطلاعات فضایی سمپوزیوم پنجم، ریوا دل گاردا، ایتالیا، 23 تا 25 ژوئن 2014. [ Google Scholar ]
- سیفوئنتس، آر. ون درزنده، دی. فریفته، ج. سالاس، سی. Coppin، P. اثرات اندازه وکسل و تنظیم نمونه بر روی تخمین کسر شکاف تاج پوشش جنگل از دادههای اسکن لیزری زمینی. کشاورزی برای. شهاب سنگ 2014 ، 194 ، 230-240. [ Google Scholar ] [ CrossRef ]
- جالونن، جی. ژرولا، جی. ویرتانن، جی.-پی. واجا، MT; کورکلا، م. Hyyppä، H. تعیین مناطق پوشش گیاهی مشخصه با اسکن لیزری زمینی برای مدلسازی جریان دشت سیلابی. آب 2015 ، 7 ، 420-437. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیانگ، ایکس. کانکاره، وی. Hyyppä، J.; وانگ، ی. کوکو، ا. هاگرن، اچ. یو، ایکس. کارتینن، اچ. جااکولا، ا. گوان، اف. و همکاران اسکن لیزری زمینی در فهرست جنگل ها ISPRS J. Photogramm. Remote Sens. 2016 ، 115 ، 63-77. [ Google Scholar ] [ CrossRef ]
- گراو، ای. دوریو، اس. فورنیه، آر. Gastellu–Etchegorry، JP; Yin, T. برآورد تراکم گیاهی سه بعدی با دادههای اسکن لیزری زمینی با استفاده از وکسل. تجزیه و تحلیل حساسیت پارامترهای تأثیرگذار سنسور از راه دور محیط. 2017 ، 191 ، 373-388. [ Google Scholar ] [ CrossRef ]
- کوکنبرینک، دی. اشنایدر، FD; لیترر، آر. Schaepman، ME; Morsdorf, F. کمی سازی حجم تاج پنهان داده های اسکن لیزری هوابرد با استفاده از الگوریتم پیمایش وکسل. سنسور از راه دور محیط. 2017 ، 194 ، 424-436. [ Google Scholar ] [ CrossRef ]
- لوگین، ا. اونیگا، وی. Giurma–Handley، C. طبقهبندی ابر نقطهای سه بعدی محیطهای طبیعی با استفاده از دادههای اسکن لیزری هوابرد. صبح. J. Eng. Res. 2018 ، 7 ، 191-197. [ Google Scholar ]
- لوکاس، سی. بوتن، دبلیو. کوما، ز. بوسیدن، WD; Seijmonsbergen، AC شناسایی عناصر پوشش گیاهی خطی در یک منظر روستایی با استفاده از ابرهای نقطه LiDAR. Remote Sens. 2019 , 11 , 292. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- واینمن، ام. واینمن، ام. مالت، سی. Brédif, M. یک چارچوب طبقه بندی-بخش بندی برای تشخیص درختان منفرد در داده های ابر نقطه MMS متراکم به دست آمده در مناطق شهری. Remote Sens. 2017 , 9 , 277. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Hůlková، M. پاولکا، ک. Matoušková, E. طبقه بندی خودکار ابرهای نقطه ای برای بزرگراه. Acta Polytech. 2018 ، 58 ، 165-170. [ Google Scholar ] [ CrossRef ]
- سیفرلینگ، آی. نایک، ن. راتی، سی. خیابانهای پرولکس، آر. Landsc. طرح شهری. 2017 ، 165 ، 93-101. [ Google Scholar ] [ CrossRef ]
- جولین، آ. جعلمه، ک. ویرتانن، جی.-پی. ماکسیمینن، م. کورکلا، م. Hyyppä، J.; Hyyppä، H. بازسازی سه بعدی چند سنسور خودکار برای وب. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 221. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ون رنترگم، تی. هورنیککس، م. فورسن، جی. Botteldooren، D. پتانسیل سبز شدن پوشش ساختمان برای دستیابی به سکوت. ساختن. محیط زیست 2013 ، 61 ، 34-44. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پاندیت، آر. پولیاکوف، م. تاپسوان، س. موران، تی. تأثیر درختان خیابان بر ارزش دارایی در پرث، استرالیای غربی. Landsc. طرح شهری. 2013 ، 110 ، 134-142. [ Google Scholar ] [ CrossRef ]
- کوندو، ام سی؛ هان، اس. دونوان، جی اچ. مک دونالد، جی. Landsc. طرح شهری. 2017 ، 157 ، 193-199. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آیزنمن، تی اس; چورکینا، جی. Jariwala، SP; کومار، پی. لواسی، جی اس. پاتاکی، دی. واینبرگر، KR; ویتلو، TH درختان شهری، کیفیت هوا، و آسم: یک بررسی بین رشته ای. Landsc. طرح شهری. 2019 ، 187 ، 47-59. [ Google Scholar ] [ CrossRef ]
- مولانی، جی. لوک، تی. Trueman, SJ مروری بر مزایا و چالشها در رشد درختان خیابانی در محیطهای آسفالتشده شهری. Landsc. طرح شهری. 2015 ، 134 ، 157-166. [ Google Scholar ] [ CrossRef ]
- جااکولا، ا. Hyyppä، J.; کوکو، ا. یو، ایکس. کارتینن، اچ. لهتوماکی، ام. Lin, Y. یک سیستم نقشه برداری متحرک چند حسی کم هزینه و امکان سنجی آن برای اندازه گیری درخت. ISPRS J. Photogramm. Remote Sens. 2010 , 65 , 514-522. [ Google Scholar ] [ CrossRef ]
- نوچرینو، ای. منا، اف. رموندینو، اف. توشی، آی. Rodríguez-Gonzálvez، P. بررسی عملکرد داخلی و خارجی دو سیستم نقشه برداری سیار قابل حمل. مجموعه مقالات Videometrics، Range Imaging, and Applications XIV، مونیخ، آلمان، 26-27 ژوئن 2017. [ Google Scholar ]
- Tanner, AL; Leroux, SJ اثر برش گیاهی کنار جاده در جستجوی گوزن. PLoS ONE 2015 ، 10 ، e0133155. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Cackowski، JM; Nasar, JL اثرات ترمیمی پوشش گیاهی کنار جاده: پیامدهایی برای خشم و ناامیدی راننده خودرو. محیط زیست رفتار 2003 ، 35 ، 736-751. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گاستون، کی جی. دیویس، TW; بنی، جی. هاپکینز، جی. کاهش پیامدهای اکولوژیکی آلودگی نوری در شب: گزینهها و پیشرفتها. J. Appl. Ecol. 2012 ، 49 ، 1256-1266. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]

شکل 1. مساحت کامل اندازهگیری و بخشهای سطح جاده تحلیلشده A، B، C، D، و E. [ 31 ] (Orthophotograph © اداره بررسی شهر هلسینکی، 2017).
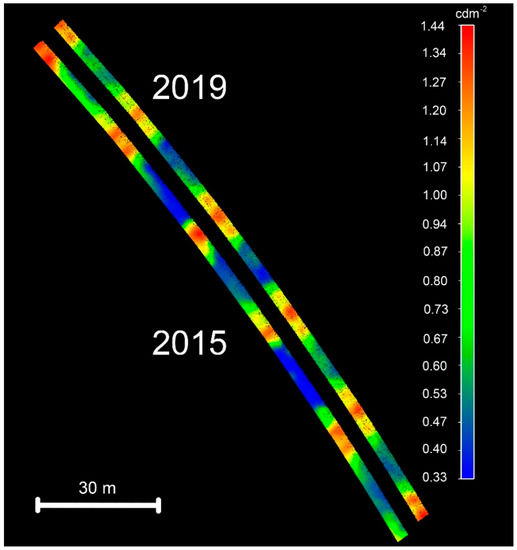
شکل 2. مقادیر درخشندگی شبه رنگی در سطح جاده برای کل منطقه اندازه گیری قبل از (2015) و پس از (2019) هرس درختان.

شکل 3. ارزیابی بصری پوشش گیاهی کنار جاده. از سمت ( a. ) و مورب بالا ( b. ). نقشه های شبه رنگی ارتفاع (m) یا محور z در مختصات محلی.
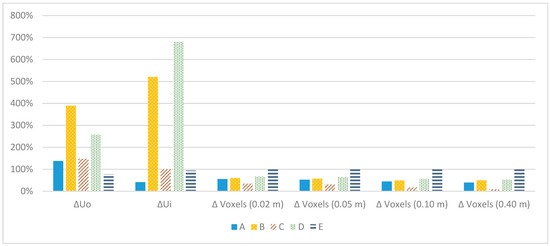
شکل 4. مقدار مطلق درصد تغییر در یکنواختی کلی U o ، یکنواختی طولی U i ، و تعداد وکسل های مسدود کننده (طول لبه: 0.02؛ 0.05؛ 0.10؛ 0.40 متر) بین اندازه گیری های انجام شده در سال 2015 و 2019 برای هر یک. قطعه جاده A-E.


بدون دیدگاه