

بازنگری داده های کاداستر در مورد مرزهای زمین با استفاده از یادگیری عمیق در نقشه برداری مبتنی بر تصویر


دانشکده مهندسی عمران و ژئودتیک، دانشگاه لیوبلیانا، Jamova Cesta 2، 1000 لیوبلیانا، اسلوونی
*
نویسنده ای که مسئول است باید ذکر شود.
دریافت: 3 مارس 2022/بازبینی شده: 21 آوریل 2022/پذیرش: 30 آوریل 2022/تاریخ انتشار: 4 مه 2022
چکیده
:
یکی از دغدغه های اصلی اداره زمین در کشورهای توسعه یافته، به روز نگه داشتن سیستم کاداستر است. هدف این تحقیق توسعه رویکردی برای شناسایی مرزهای زمین قابل مشاهده و تجدید نظر در دادههای کاداستر موجود با استفاده از یادگیری عمیق بود. شبکه عصبی کانولوشنال (CNN)، بر اساس معماری اصلاح شده، با استفاده از مجموعه دادههای تقسیمبندی برکلی 500 (BSDS500) که به صورت آنلاین در دسترس است، آموزش داده شد. این مجموعه داده برای تشخیص لبه و مرز شناخته شده است. این مدل در دو منطقه روستایی در اسلوونی آزمایش شد. نتایج با استفاده از یادآوری ، دقت و امتیاز F1 – به عنوان روشی مناسبتر برای کلاسهای نامتعادل، ارزیابی شدند. از نظر کیفیت تشخیص، یادآوری متعادل و دقتمنجر به امتیازات F1 0.60 و 0.54 برای Ponova vas و Odranci شد. با یادآوری (کامل) کمتر، مدل توانست مرزها را با دقت (صحت) 0.71 و 0.61 پیش بینی کند. هنگامی که داده های کاداستر تجدید نظر شد، مقادیر کم به این معنی تفسیر شد که هرچه فراخوان کمتر باشد، نیاز به به روز رسانی داده های کاداستر موجود بیشتر می شود. در مورد Ponova vas، مقدار فراخوان کمتر از 0.1 بود، به این معنی که مرزها همپوشانی نداشتند. در اودرانچی، 21 درصد از مرزهای پیش بینی شده و کاداستر همپوشانی دارند. از آنجایی که جهت خطوط مشکلی نداشت، فراخوان کم بودمقدار (0.21) عمدتاً به دلیل قطعه قطعه شدن بیش از حد بود. به طور کلی، روشهای خودکار سریعتر هستند (پس از آموزش مدل) اما دقت کمتری نسبت به روشهای دستی دارند. برای بازنگری سریع مرزهای کاداستر موجود، یک رویکرد خودکار قطعا برای بسیاری از آژانس های ملی نقشه برداری و کاداستر، به ویژه در کشورهای توسعه یافته، مطلوب است.
کلید واژه ها:
زمین ; مرز قابل مشاهده ؛ کاداستر ; نگهداری ; پهپاد ; یادگیری عمیق
1. مقدمه
ترسیم مرزهای حقوق زمین، ایجاد کاداستر کامل و به روز نگه داشتن آن از دغدغه های اصلی اداره زمین است. با توجه به اینکه سه چهارم حقوق زمین در جهان به رسمیت شناخته و ثبت نشده است، لازم است روند نقشه برداری کاداستر تسریع شود [ 1 ]. چالش ایجاد یک کاداستر کامل معمولاً در کشورهای در حال توسعه – با پوشش کاداستر کم [ 2 ، 3 ] به وجود می آید. نقشه برداری و ثبت حقوق زمین در یک کاداستر رسمی قرار است امنیت مالکیت زمین را افزایش دهد [ 4 ، 5 ]. با این حال، یک کاداستر موثر همچنین باید اطلاعات به روزی را در مورد روابط مردم و زمین فراتر از مرحله قضاوت ارائه کند [ 6 ]، 7 ]. به روز رسانی، در بیشتر موارد، به مقایسه دو مجموعه داده اشاره دارد – یکی منعکس کننده وضعیت پایگاه داده کاداستر و دیگری تازه به دست آمده [ 8 ]. با توجه به این موضوع، اصطلاح “بازبینی” به عنوان مترادف استفاده می شود – زیرا “به روز رسانی” (به عنوان یک عمل تغییر رسمی) مبتنی بر “بازبینی” است.
در کشورهایی که در حال حاضر یک کاداستر کامل دارند، ارائه دادههای زمین بهروز یک اولویت است [ 9 ]. دهه ها طول کشیده است تا کاداستر در این کشورها کامل شود، جایی که تکنیک های مرسوم مانند تکنیک های نقشه برداری زمینی یا فتوگرامتری هوایی آنالوگ به طور معمول استفاده می شود [ 10 ]. هر دو روش کار فشرده و وقت گیر در نظر گرفته می شوند [ 11 ، 12 ]. نتیجه ایجاد نقشههای کاداستر آنالوگ و ثبتهای زمین بود که بعداً باید دیجیتالی میشد و در یک سیستم اطلاعات جغرافیایی (GIS) یا سیستمهای اطلاعات زمین گستردهتر ادغام میشد. اگرچه کاداسترهای کامل ایجاد شد، بسیاری از آژانس های ملی نقشه برداری و کاداستر (NMCAs) نتوانستند به درستی کاداسترها را حفظ کنند.13 ]. واقعیتی که کاداسترها سعی در ترسیم آن دارند، پیچیده و پویا است [ 14 ، 15 ]، و دست کم گرفتن پویایی روابط بین مردم و زمین، در واقعیت، منجر به منسوخ شدن نقشه های کاداستر شده است. جدای از پیشرفتها در فناوریهای نقشهبرداری و نقشهبرداری، که بیشتر آنها قبلاً در کشورهای در حال توسعه آزمایش شدهاند [ 16 ، 17 ، 18 ، 19 ]، نقشه برداری کاداستر و نگهداری دادههای مرزی در کشورهای توسعهیافته همچنان با استفاده از تکنیکهای زمینی انجام میشد. به عنوان روش های تاکئومتری و سیستم های ماهواره ای ناوبری جهانی (GNSS) [ 10 ، 12]. این رویکرد چالشهای زیادی را از نظر کارایی نقشهبرداری ارائه میکند که میتوان با نقشهبرداری کم هزینه و سریع کاداستر و تکنیکهای نقشهبرداری غیرمستقیم بر آن غلبه کرد.
تکنیکهای نگاشت غیرمستقیم بر ترسیم مرزهای کاداستر قابل مشاهده از تصاویر سنجش از دور با وضوح بالا متکی هستند. کاربرد نگاشت کاداستر مبتنی بر تصویر مبتنی بر تشخیص این است که بسیاری از مرزهای کاداستر با ساختارهای طبیعی یا ساخته دست بشر که به آسانی در تصاویر سنجش از دور قابل مشاهده هستند، منطبق هستند [ 3 ، 17 ]. در کاربردهای کاداستر، وسایل نقلیه هوایی بدون سرنشین (پهپادها) پتانسیل زیادی برای نقشه برداری از مرزهای زمین در مناطق روستایی و شهری نشان داده اند [ 18 ، 20 ، 21 ، 22 ]. علاوه بر این، تصویربرداری مبتنی بر پهپاد به عنوان یک نقشه پایه برای ایجاد نقشه های کاداستر و برای تجدید نظر در نقشه های کاداستر موجود در نظر گرفته شده است [ 23 ]., 24 , 25 ]. جدای از دید بالای واحدهای فضایی در تصاویر پهپاد مربوط به نقشهبرداری کاداستر، بسیاری از مطالعات موردی قبلی ترسیم دستی واحدهای فضایی را گزارش کردهاند [ 16 ]، اما تنها تعداد محدودی از مطالعات رویکرد نقشهبرداری خودکار را بررسی کردهاند. هدف رویکردهای نوآورانه سادهسازی و سرعت بخشیدن به نقشهبرداری کاداستر مبتنی بر تصویر با خودکار کردن ترسیم مرزهای قابل مشاهده است. عمدتاً، الگوریتمهای تقسیمبندی تصویر سفارشی و تشخیص لبه برای تنظیم خودکار نقشهبرداری کاداستر استفاده شده است [ 23 ، 26 ].
روشهای مدرن برای تشخیص خودکار مرز در نقشهبرداری کاداستر نیز شامل یادگیری عمیق است [ 27 ، 28 ، 29 ، 30 ]. مطالعات اخیر نشان می دهد که یادگیری عمیق مانند شبکه های عصبی کانولوشنال (CNN) دقت بالاتری را در تعیین مرزهای زمین قابل مشاهده نسبت به برخی از پیشرفته ترین تکنیک های یادگیری ماشینی یا مبتنی بر شی تضمین می کند [ 27 ، 28 ]. CNN ها را می توان به دو روش آموزش داد: از ابتدا یا با انتقال یادگیری [ 31]. هنگام آموزش مدل از ابتدا، داده های سنجش از راه دور باید ارائه شوند، به عنوان مثال، تصاویر و برچسب ها. در یادگیری انتقال، مدل از قبل آموزش داده شده است، معمولا با حجم زیادی از داده ها با ویژگی های انتزاعی تر، و آخرین لایه کانولوشن با ویژگی های خاص برنامه جدید آموزش داده می شود. کروملینک و همکاران [ 27 ] مدل را با استفاده از یادگیری انتقالی از قبل آموزش داد و گزارش کرد که VGG19، یعنی 19 لایه عمیق CNN، تشخیص خودکار و دقیقتری از مرزهای قابل مشاهده از تصاویر پهپاد را نسبت به جنگل تصادفی فراهم میکند. پیش آموزش بر اساس تصاویر هوایی بود که باید ارائه می شد. علاوه بر این، این مطالعه نشان میدهد که مدل مبتنی بر VGG19 معیارهای امیدوارکنندهتری را نسبت به برخی معماریهای دیگر (مانند ResNet، MobileNet و DenseNet) ارائه میکند. شیا و همکاران [ 28] یک CNN کاملاً برای تشخیص مرزهای کاداستر در مناطق شهری و نیمه شهری بررسی کرد. این مدل از ابتدا با استفاده از کاشیهای پهپاد آموزش داده شد و نتایج نشان میدهد که این رویکرد از تکنیکهای مبتنی بر شی، از جمله مرز احتمال جهانی (gPb) و تقسیمبندی چند وضوح (MRS) بهتر عمل میکند. پارک و سونگ [ 32 ] با هدف شناسایی تغییرات بین نقشههای کاداستر موجود و مرزهای کاربری فعلی زمین در این زمینه انجام شد. این مدل از ابتدا با استفاده از تصاویر پهپاد فراطیفی آموزش داده شد. با این حال، ارائه هزاران داده آموزشی پهپاد می تواند یک محدودیت در نظر گرفته شود، به خصوص زمانی که یک مدل از ابتدا آموزش داده شود، همانطور که در [ 29 برجسته شده است.]. این را می توان با معماری CNN که به داده های آموزشی کمتری نیاز دارد، به عنوان مثال U-Net، و به دنبال آن افزایش داده ها قبل از پردازش [ 29 ، 33 ] غلبه کرد. چالشی که در اینجا وجود دارد این است که تأیید کنیم که چه مقدار از دادههای آموزشی پهپاد برای یادگیری یک مدل شبکه قوی باید وجود داشته باشد.
هدف مطالعه
به طور کلی، استدلال میشود که چالش اصلی CNNهایی که از نقشهبرداری کاداستر پشتیبانی میکنند، پردازش مقدار زیادی از دادههای آموزشی سنجش از دور و الزامات محاسباتی است. بنابراین، یک شرط مهم برای هر روش یادگیری عمیق این است که کل زمان مورد نیاز برای تشخیص مرزهای نهایی، از جمله پیش و پس پردازش، نباید بیشتر از کل زمان یک روش دستی باشد [ 10 ]. این به عنوان یک توجیه عمل می کند و اجازه می دهد تا هدف این مطالعه تعریف شود.
هدف اصلی این مطالعه توسعه یک رویکرد کارآمد و مقرون به صرفه برای نقشه برداری مرزهای زمین قابل مشاهده با استفاده از CNN بود. رویکرد نقشه برداری بر اساس تشخیص مرزهای زمین قابل مشاهده است که با بخش های بزرگی از مرزهای کاداستر منطبق است – به ویژه در مناطق روستایی. اتوماسیون تشخیص مرز قابل مشاهده زمین می تواند برای اصلاح نقشه های کاداستر موجود و شناسایی خودکار مناطقی که به روز رسانی مورد نیاز است استفاده شود. در این مرحله باید تاکید کرد که تمام مرزهای کاداستر قابل مشاهده نیستند و تشخیص برخی از آنها در تصاویر پهپاد دشوار است.
2. مواد و روشها
گردش کار این مطالعه از چهار بخش اصلی تشکیل شده است، یعنی رویکرد آموزشی، تشخیص مرز قابل مشاهده، ارزیابی دقت، و برداری از نقشه های مرزی. تک تک مراحل و جزئیات در زیر بخش های زیر توضیح داده شده است. گردش کار تعمیم یافته در شکل 1 نشان داده شده است .
2.1. رویکرد آموزشی و مجموعه داده
با توجه به هدف اصلی، CNN که به مقدار کمتری از داده های آموزشی نیاز دارد، ترجیح داده می شود. U-Net یک معماری CNN است که محلی سازی سریع و دقیق ویژگی ها را از تصاویر فراهم می کند. U-Net از یک مسیر رمزگذاری و یک مسیر رمزگشایی تشکیل شده است که به آن یک شکل U می دهد. مسیر رمزگذاری یک شبکه کانولوشن است که از پیچیدگی های مکرر (3×3) تشکیل شده است که هر کدام توسط یک عملیات ReLU و حداکثر ادغام (2×2) دنبال می شود. در طول مسیر رمزگذاری، وضوح فضایی کاهش می یابد در حالی که اطلاعات ویژگی افزایش می یابد. مسیر رمزگشایی اطلاعات فضایی و ویژگی را از طریق دنباله ای از پیچیدگی های بالا (2×2) و ادغام با ویژگی های با وضوح بالا از مسیر رمزگشایی ترکیب می کند، جایی که اندازه تصاویر به اندازه اصلی خود تبدیل می شود. شرح مفصلی از معماری اصلی U-Net را می توان در [33 ]. در این مطالعه، U-Net به عنوان یک آشکارساز مبتنی بر یادگیری عمیق برای مرزهای قابل مشاهده در نظر گرفته شد.
با توجه به پیچیدگی مشکل دامنه ما، یعنی تشخیص مرزهای زمین قابل مشاهده برای اصلاح نقشه های کاداستر موجود، معماری اصلی سفارشی شد و در شکل 2 نشان داده شده است . سفارشی سازی شامل حذف اولین سطح U-Net اصلی بود. این تعداد پارامترهای قابل آموزش را کاهش می دهد و از نظر پیچیدگی برای مشکل دامنه ما کافی بود.
این مدل با استفاده از مجموعه دادههای تقسیمبندی برکلی 500 (BSDS500) آموزش داده شد و در [ 34 ] موجود است.]. BSDS500 یک مجموعه داده قابل دسترسی و یک معیار استاندارد برای تقسیمبندی تصویر و وظایف تشخیص لبه یا مرز است که میتواند برای آموزش CNN در حین مطابقت با مشکل دامنه این مطالعه استفاده شود. مجموعه داده شامل 500 تصویر روزمره و برچسب های مربوط به آنها است. این رویکرد در نظر گرفته شده است که قابل انتقال به تصاویر صحنه ها و زمینه های دیگر باشد – به عنوان مثال، تصاویر پهپاد. داده ها در زیر مجموعه های آموزشی، اعتبار سنجی و آزمایش سازماندهی می شوند. هر تصویر دارای مرزهایی با برچسب دستی است که به طور متوسط از پنج حاشیه نویس یا در مجموع حدود 2500 نمونه می آید. برای افزایش تعداد نمونه های آموزشی و بهبود انعطاف پذیری تقسیم اعتبار، تصاویر زیر مجموعه های آموزشی و اعتبار سنجی در یکی ادغام شدند. علاوه بر این، اندازه تصویر مورد نظر روی 256 × 256 پیکسل تنظیم شد.
آموزش CNN به حافظه زیاد و یک واحد پردازش گرافیکی قدرتمند (GPU) برای انجام محاسبات کارآمد نیاز دارد. برای مبارزه با این، آموزش U-Net سفارشی شده با مجموعه داده BSDS500 در Google Collaboratory [ 35 ] انجام شد. مدل در Keras [ 36 ] پیادهسازی شد و فرآیند با استفاده از کتابخانه TensorFlow [ 37 ] در پایتون نوشته شد. مدل آموزش دیده با استفاده از تصاویر پهپاد با اندازه 256 × 256 پیکسل آزمایش شد.
2.2. تشخیص مرز قابل مشاهده از داده های پهپاد
دو منطقه روستایی برای آزمایش مدل U-Net انتخاب شدند، یکی در Ponova vas و دیگری در Odranci، هر دو در اسلوونی. مناطق روستایی به این دلیل انتخاب شدند که تعداد مرزهای قابل مشاهده کاداستر در این مناطق بیشتر از مناطق متراکم شهری است.
در Ponova Vas، ارتفاع پرواز روی 80 متر تنظیم شد و 354 تصویر برای پوشش منطقه مورد مطالعه به دست آمد ( شکل 3 a). تصاویر پهپاد به طور غیرمستقیم با استفاده از 12 نقطه کنترل زمینی (GCP) که به طور مساوی در میدان توزیع شده اند، ارجاع داده شدند. GCPها با سینماتیک بلادرنگ (RTK) با استفاده از سیستم ماهواره ناوبری جهانی (GNSS) و گیرنده لایکا ویوا بررسی شدند. منطقه مورد مطالعه دارای مساحت 25 هکتار بود و از تصاویر پهپاد یک تصویر ارتو با فاصله نمونه برداری از زمین (GSD) 0/2 سانتی متر تهیه شد.
در Odranci، تصاویر پهپاد در ارتفاع 90 متری و 997 تصویر برای پوشش منطقه مورد مطالعه به دست آمد ( شکل 3 ب). در مجموع از 18 GCP برای ارجاع جغرافیایی تصاویر پهپاد استفاده شد. GCPها با استفاده از RTK با گیرنده GNSS Leica GS18 بررسی شدند. GSD تصویر ارتوی تولید شده 3/2 سانتی متر و مساحت منطقه مورد مطالعه 9/63 هکتار بود.
تمام داده های پهپاد با استفاده از یک پهپاد بال چرخشی به نام DJI Phantom 4 Pro به دست آمده است. مناطق روستایی منتخب شامل مزارع کشاورزی، جاده ها، نخلستان های درختی و پرچین بود. جدول 1 مشخصات داده های پهپاد را نشان می دهد.
تصاوير ارتومي پهپاد براي Ponova vas و Odranci به صورت تصادفي در ابعاد 256×256 پيکسل کاشي شد. برای افزایش میدان دید برای هر کاشی، با استفاده از روش نمونهگیری مجدد نزدیکترین همسایه، وضوح فضایی اصلی تصاویر اورتومیک پهپاد باید به یک GSD بزرگتر، از 2 سانتیمتر به 25 سانتیمتر تبدیل میشد. علاوه بر این، تصاویر مربوط به حقیقت زمین (که تصاویر برچسب نیز نامیده می شود) برای هر تصویر پهپاد ایجاد شد. تصاویر زمینی 256 × 256 × 1 از مرزهای زمین قابل مشاهده دیجیتالی شده به صورت دستی ایجاد شده اند که در ابتدا در قالب برداری بودند ( شکل 3 a,b). از آنجایی که نقشه های مرزی پیش بینی شده در قالب شطرنجی بودند، مرزهای مرجع با 50 سانتی متر بافر شدند و بعداً با استفاده از ابزار GRASS GIS [ 38 ] شطرنجی شدند.]. مقایسه مرزهای پیشبینیشده با مرزهای بردار دستی به مدل CNN امکان ارزیابی میدهد، به عنوان مثال، توانایی مدل برای تولید نقشههای مرزی برای مرزهای زمین قابل مشاهده است.
علاوه بر این، از مرزهای کاداستر نیز به عنوان داده های مرجع استفاده شد. مرزهای کاداستر با استفاده از ابزار و اندازه بافر مشابه با مرزهای دستی شطرنجی شدند. بر خلاف رویکرد دستی، با مقایسه مرزهای پیش بینی شده با مرزهای کاداستر، می توان تعداد مرزهای کاداستر را که با مرزهای زمین قابل مشاهده همپوشانی دارند، تعیین کرد. این رویکرد اجازه می دهد تا نقشه های کاداستر موجود تجدید نظر شود. مرزهای کاداستر فعلی از پورتال الکترونیکی NMCA اسلوونی، یک پلت فرم آنلاین برای درخواست داده های رسمی کاداستر [ 39 ] بازیابی شد.
نقشههای مرزی پیشبینیشده ارجاع داده نشدند. از آنجایی که ارجاع جغرافیایی یک جزء کلیدی در نقشه برداری کاداستر است، ویرایش های بیشتری انجام شد. ابتدا نقشههای مرزی پیشبینیشده (برای هر کاشی پهپاد) ارجاع داده شدند. دوم، کاشیهای زمین مرجع ادغام شدند تا نقشه مرزی برای کل وسعت به دست آید. تجزیه و تحلیل و پردازش بیشتر با استفاده از GDAL [ 40 ]، Rasterio [ 41 ] و Numpy [ 42 ] انجام شد. پس از ارجاع جغرافیایی، نقشه های مرزی ادغام شده برای ارزیابی دقت و کمیت همپوشانی بین مرزهای مرئی و کاداستر استفاده شد.
2.3. ارزیابی دقت
ارزیابی دقت به ارزیابی مدل CNN و ارزیابی کیفیت تشخیص مرزهای زمین قابل مشاهده برای داده های پهپاد اشاره دارد.
مدل CNN، یعنی مدل سفارشی U-Net، در طول آموزش با دقت و از دست دادن نظارت شد . زیان نشان دهنده تفاوت بین مرزهای پیش بینی شده توسط مدل و مرزهای مرجع است. در این مطالعه، از دست دادن آنتروپی متقاطع استفاده شد – رایج ترین تابع تلفات مورد استفاده در CNN ها. عملکرد مدل با استفاده از دقت کلی اندازه گیری شد . دقت کلی به عنوان یک معیار ارزیابی به عنوان مجموع مرزهای پیش بینی شده به درستی توسط مدل تقسیم بر تمام مرزهای پیش بینی شده تعریف می شود. تعاریف و معادلات آنتروپی متقاطع و دقت کلیرا می توان در [ 43 ] یافت.
تشخیص مرز بر اساس CNN ها در حوزه طبقه بندی باینری قرار می گیرد. در اینجا، یافتن پیکسل های متعادل برای کلاس های “مرز” و “بدون مرز” یک چالش است. دلیل آن این است که تعداد پیکسلهای پسزمینه (کلاس «بدون مرز») در نقشههای مرزی پیشبینیشده یا نقشههای کاداستر همیشه بسیار بیشتر از تعداد پیکسلهایی است که خود مرزها را نشان میدهند. به همین دلیل، کیفیت تشخیص (یعنی درجه مرزهای قابل مشاهده به درستی شناسایی شده در مقایسه با داده های مرجع) با محاسبه امتیاز F1 ، یادآوری و دقت ارزیابی شد.– معیارهای مناسب تر برای کلاس های نامتعادل. در چنین محاسبهای، پیکسلهای “مرز” به عنوان یک کلاس مثبت تعریف میشوند، زیرا این تمرکز مطالعه ما بود.
جدول 2 ماتریس سردرگمی را نشان می دهد که برای ارزیابی کیفیت تشخیص مرزهای زمین قابل مشاهده و همپوشانی بین مرزهای قابل مشاهده و کاداستر استفاده می شود. ماتریس سردرگمی پیکسل ها را به مثبت واقعی (TP)، مثبت کاذب (FP)، منفی واقعی (TN) و منفی کاذب (FN) طبقه بندی می کند.
بر اساس تعداد پیکسلهای ماتریس سردرگمی، فراخوانی و دقت با معادلات زیر محاسبه میشوند:
یادآوری را می توان به عنوان کامل بودن تفسیر کرد، در حالی که دقت به معنای صحت است و هر دو برای نقشه برداری کاداستر مهم هستند. امتیاز F1 از یادآوری و دقت تشکیل شده است و با معادله زیر بیان می شود:
2.4. بردار سازی نقشه های مرزی پیش بینی شده – تبدیل هاف
نقشه های کاداستر فعلی در قالب برداری هستند و معمولاً در محیط GIS ادغام می شوند. برای به دست آوردن داده های خروجی مطابق با کاداستر، یک فرآیند برداری خودکار اجرا شد. نقشههای مرزی پیشبینیشده در قالب شطرنجی، با مقادیر پیکسل از ۰ تا ۱ – برای هر کاشی پهپاد به عنوان ورودی، در دسترس بودند. پس از ارجاع جغرافیایی، مرزهای پیش بینی شده به طور خودکار با استفاده از تبدیل Hough [ 44 ، 45 ] بردار شدند. بردارسازیها برای نقشههای پیشبینیشده باینری، با آستانه “مرز” ≥0.3 و “مرز” ≥0.5 انجام شد. آستانه ها بر اساس ارزیابی دقت مرزهای زمین قابل مشاهده شناسایی شده انتخاب شدند.
تبدیل Hough خطوط مستقیم یا منحنی ها را از تصاویر استخراج می کند و می تواند برای دیجیتالی کردن نقشه های کاداستر [ 46 ]، یا برای استخراج مرزهای زمین [ 47 ] استفاده شود. تکنیک استخراج ویژگی در Matlab پیاده سازی شد. در اینجا، این تکنیک برای تشخیص خطوط با استفاده از نمایش پارامتریک یک خط طراحی شده است:
جایی که:
ρ – فاصله مبدا تا خط در امتداد بردار عمود بر خط،
θ – زاویه بین محور x و این بردار.
پارامترهای مختلف برای برداری آزمایش شدند و به طور تجربی تأیید کردند که پارامترهای زیر به طور کلی بهترین نتایج را ارائه می دهند: وضوح برای ρ و θبه ترتیب روی 2 و 0.05 تنظیم شد و خطوطی با طول حداقل 10 پیکسل و شکاف های 10 پیکسلی بین پاره های یک خط مستقیم جستجو شد. بردارسازی کاشیهای نسبتاً کوچک با استفاده از تبدیل Hough از نظر محاسباتی سخت نیست، که به ما اجازه میدهد آن را به طور مکرر پیادهسازی کنیم. پس از بردار کردن خط مستقیم که با بالاترین مقدار تبدیل Hough مطابقت دارد، پیکسل های تصویر باینری در فاصله 3 پیکسلی از خط بردار روی 0 تنظیم شدند. سپس تبدیل Hough دوباره انجام شد. با روش اجرا شده، خطوط ساده شده و از بردار شدن خطوط دوتایی مجاور جلوگیری شد.
3. نتایج
3.1. CNN و رویکرد آموزشی
بر اساس معماری سفارشی U-Net، CNN با مجموعه داده BSDS500 با اندازه هدف روی ۲۵۶×۲۵۶ پیکسل آموزش دید. تصاویر آموزشی به صورت RGB بود و 30 درصد از داده های آموزشی برای اعتبارسنجی استفاده شد. این منجر به 1505 نمونه برای آموزش و 645 نمونه برای اعتبار سنجی شد.
پس از چند آزمایش، پارامترهای آموزشی برای تنظیم دقیق مدل تنظیم شدند. برای جلوگیری از تغییر اندازه نقشههای مرزی پیشبینیشده برای هر تصویر ورودی، یک روش حداکثر ادغام با لایهبندی برابر مشخص شد. همچنین از نرخ ترک تحصیل 0.5 استفاده شد. نرخ ترک تحصیل برای نادیده گرفتن نورونهای انتخابی تصادفی برای جلوگیری از برازش بیش از حد مدل استفاده میشود. عمق لایه روی 1024 تنظیم شد و یک سیگموئید به عنوان لایه فعال سازی نهایی استفاده شد. در طول آموزش، بهینه ساز Adam با نرخ یادگیری 10-4 استفاده شد .
این مدل با اندازه دسته ای 16 برای 50 دوره آموزش داده شد. عملکرد توقف اولیه با صبر 10 دوره فعال شد. این ویژگی زمانی که بهبود عملکرد مدل در مجموعه داده اعتبار سنجی متوقف شود، آموزش را متوقف می کند. تعداد مراحل در هر دوره با تقسیم تعداد کل نمونه های آموزشی بر اندازه دسته محاسبه شد. آموزش در Google Collaboratory انجام شد. این سرویس دسترسی به GPU های مختلف را فراهم می کند که بر زمان آموزش تأثیر می گذارد. در این مطالعه، این سرویس یک پردازنده گرافیکی با 12.7 گیگابایت رم ارائه کرد. توقف زودهنگام به تمرین در دوره 18 پایان داد که 1.5 ساعت طول کشید. با یک GPU قدرتمندتر، به عنوان مثال، 25 گیگابایت، آموزش مدل برای 100 دوره 82 دقیقه (با اندازه دسته ای 32 و بدون توقف اولیه) طول کشید. عملکرد آموزشی U-Net سازگار شده در شکل 4 نشان داده شده است.
3.2. تشخیص مرز قابل مشاهده از تصاویر پهپاد
هنگامی که مدل آموزش داده شد، برای تشخیص مرزهای زمینی قابل مشاهده، روی تصاویر پهپاد 256 × 256 × 3 اعمال شد. یک نقشه مرزی پیش بینی برای هر کاشی پهپاد ایجاد شد. نقشه های مرزی برای تعیین وسعت کل منطقه آزمایشی، جغرافیایی ارجاع و ادغام شدند. نتایج نقشههای مرزی پیشبینیشده بر اساس کاشیهای پهپاد با ارجاع جغرافیایی و ادغام شده در شکل 5 و شکل 6 نشان داده شده است. علاوه بر این، نتایج به دست آمده با CNN سفارشی شده با U-Net اصلی مقایسه شد.
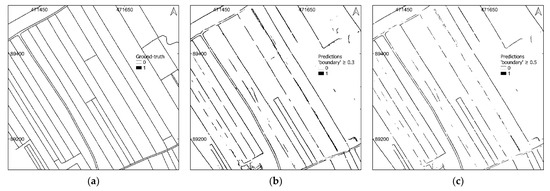
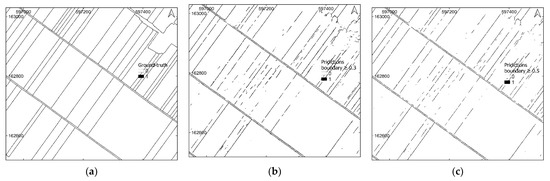
نقشه های مرزی پیش بینی شده، نشان داده شده در شکل 5 و شکل 6 ، دارای مقادیر پیکسلی از 0 تا 1 بودند. برای ارزیابی کیفیت تشخیص مرزهای زمین قابل مشاهده، پیش بینی ها با داده های حقیقت زمینی در مرزهای زمین که به صورت دستی دیجیتالی شده بودند، مقایسه شدند. از تصاویر پهپاد داده های زمینی شامل دو کلاس، یعنی «مرز» و «بدون مرز» به ترتیب با مقادیر 1 و 0 بود، بنابراین نقشه های مرزی پیش بینی شده به دو کلاس با مقادیر آستانه 0.3 و 0.5 طبقه بندی شدند. نتایج نقشه های مرزی طبقه بندی مجدد در شکل 7 و شکل 8 نشان داده شده است.
3.3. بازنگری داده های کاداترال موجود در مورد مرزهای زمین
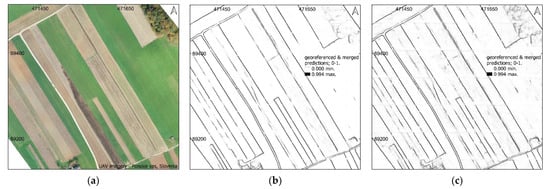
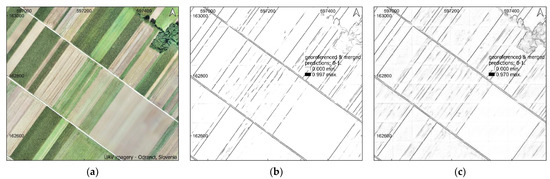
نقشه های مرز زمین پیش بینی شده با بالاترین امتیاز F1 ، به دست آمده با CNN سفارشی شده ( جدول 3 و جدول 4 )، برای بازنگری بیشتر نقشه های کاداستر موجود برای دو منطقه آزمایشی، Ponova vas و Odranci استفاده شد. علاوه بر این، مرزهای مرئی بردار دستی با دادههای کاداستر موجود در مرزهای زمین برای به دست آوردن مقادیر مرجع برای همپوشانی دو لایه دادههای مکانی مقایسه شدند. بازنگری نقشه های کاداستر موجود بر اساس همان معیارهای مورد استفاده برای ارزیابی دقت در بخش قبل بود. همانطور که در شکل 9 و شکل 10 نشان داده شده است، نقشه های کاداستر موجود با مرزهای قابل مشاهده به طور خودکار شناسایی شدند .. ارزیابی دقت در جدول 5 و جدول 6 نشان داده شده است .
مرزهای پیشبینیشده برای مطابقت با قالب دادههای کاداستر فعلی بردار شدند. برداری با استفاده از تبدیل Hough انجام شد. شکاف پر 10 به این دلیل اعمال شد که مناسبتر در نظر گرفته شد و بنابراین از احتمال سوگیری در مرزهای پیشبینیشده اجتناب کردیم. این رویکرد نه تنها پیکسل های تعریف شده به عنوان “مرز” را بردار می کند، بلکه خطوط مستقیمی را نیز تولید می کند که برای نقشه برداری کاداستر بسیار مهم هستند. این را می توان یک مرحله برداری و ساده سازی در نظر گرفت. هنگامی که بردارسازی کامل شد، ما همچنین یک نقشه همپوشانی (اختلاف) ایجاد کردیم که در شکل 11 قابل مشاهده است.
4. بحث
بحث به سه بخش تقسیم میشود: (من) CNN و رویکرد آموزشی برای نقشهبرداری مرز قابل مشاهده. (2) تشخیص مرزهای زمین قابل مشاهده با استفاده از تصاویر پهپاد و یادگیری عمیق و (iii) بازنگری نقشههای کاداستر موجود بر اساس مرزهای زمین قابل مشاهده شناسایی شده و دیجیتالی شده، با توجه به اهداف مطالعه ما.
4.1. CNN و رویکرد آموزشی
به طور کلی، یادگیری عمیق یک حوزه تحقیقاتی نسبتاً جدید در حوزه جغرافیایی است و پتانسیل زیادی برای تشخیص ویژگی از تصاویر سنجش از دور ارائه میدهد [ 30 ]. ارتقاء راه حل های یادگیری عمیق، از جمله CNN ها، برای تشخیص مرزهای زمینی قابل مشاهده، به طور فزاینده ای مهم می شود، به ویژه برای نقشه برداری کاداستر مبتنی بر پهپاد [ 27 ، 29 ]. یادگیری عمیق نیازمند پردازش حجم زیادی از داده های آموزشی و محاسبات قدرتمند است. در این مطالعه، یک رویکرد یادگیری عمیق کارآمد و مقرون به صرفه ایجاد شد که نتایج معقولی ارائه میدهد و به خودکارسازی بیشتر فرآیند نقشهبرداری کاداستر کمک میکند.
مدل CNN بر اساس معماری U-Net [ 33 ] است. از آنجایی که مشکل تحقیق ما طبقه بندی باینری بود، معماری اصلی U-Net ساده شد ( شکل 2 ) تا تعداد پارامترهای آموزشی و زمان آموزش کاهش یابد. این منجر به نتیجه کارآمدتر و در عین حال دقیق تر در مقایسه با معماری اصلی شد ( شکل 5 و شکل 6 و جدول 3 و جدول 4 ).
آموزش مدل CNN بر اساس مجموعه داده BSDS500 [ 34 ] بود. این مجموعه داده به خوبی برای وظایف تشخیص لبه یا مرز شناخته شده است و قبلاً با هدف مطالعه مطابقت دارد. مدل CNN از ابتدا آموزش داده شد و هیچ آمادهسازی اضافی برای دادههای آموزشی تکمیل نشد زیرا مجموعه داده حاوی تصاویر و برچسبها بود. به طور معمول، CNN ها از ابتدا یا با یادگیری انتقالی آموزش داده می شوند. هر دو رویکرد مستلزم آماده سازی داده های آموزشی سفارشی، از جمله تصاویر و برچسب ها هستند که معمولاً مدتی طول می کشد و قبلاً در [ 27 ، 28 ، 29 برجسته شده است.]. با این حال، مقدار داده های آموزشی به نوع معماری CNN مورد استفاده بستگی دارد. به عنوان مثال، U-Net یک معماری است که به داده های آموزشی کمتری نیاز دارد و همچنان محلی سازی های دقیق را ارائه می دهد [ 33 ]. در این مطالعه، مدل با 1505 نمونه آموزش داده شد که میتوان آن را مقدار کمی از دادههای آموزشی در نظر گرفت، اما مدل همچنان نتایج رضایتبخشی ارائه کرد. علاوه بر این، این مدل برای 18 دوره آموزش داده شد و در مجموع به 1.5 ساعت برای تکمیل آموزش نیاز داشت که می تواند یک رویکرد سریع نیز در نظر گرفته شود. مدل CNN در Google Collaboratory [ 35]. این رویکرد هزینه پردازنده های گرافیکی و رم قوی را کاهش می دهد و می توان آن را یک رویکرد کم هزینه در نظر گرفت. تنها گلوگاه حافظه رم ارائه شده است که از 12.7 گیگابایت تا 25 گیگابایت متغیر است. این تغییرات بر زمان تمرین نیز تاثیر می گذارد. علاوه بر این، وقفه هایی در طول آموزش وجود داشت، بنابراین یک کامپیوتر محلی در این زمینه مفید است و می تواند راه حل پایدارتری در نظر گرفته شود.
عملکرد مدل در طول تمرین با از دست دادن ، دقت کلی و امتیاز F1 کنترل شد ( شکل 4 ). باخت از دوره اول تا پایان تمرین به طور پیوسته کاهش یافت. تابع توقف زودهنگام از دست دادن اعتبارسنجی را برای توقف آموزش قبل از برازش بیش از حد مدل نظارت کرد. دقت کلی از ابتدای آموزش مقادیر بالایی داشت، که عمدتاً به دلیل پیکسل های نامتعادل برای کلاس های “مرز” و “بدون مرز” بود. علاوه بر این، امتیاز F1 اعمال شد. در این مرحله باید تاکید کرد که دقت کلینمی تواند به عنوان یک معیار مناسب برای نظارت بر عملکرد مدل در طول آموزش در نظر گرفته شود. دلیل آن این است که مشکل اصلی در وظایف تشخیص مرز، تعداد نامتعادل پیکسل ها در هر کلاس است. به طور معمول، پیکسل های مرزی در مقایسه با پیکسل های پس زمینه، تعداد پیکسل های کمی را اشغال می کنند. به همین دلیل، مدل علاوه بر این با امتیاز F1 ، که فقط برای پیکسلهای کلاس «مرز» محاسبه میشد، نظارت شد.
4.2. تشخیص مرز قابل مشاهده از تصاویر پهپاد
در این مطالعه از یادگیری عمیق به عنوان آشکارساز برای مرزهای قابل مشاهده زمین استفاده شد. هنگامی که مدل آموزش داده شد، بر روی داده های آزمایش پهپاد اعمال شد. ابتدا، پهپادهای اصلی از 2 سانتی متر به 25 سانتی متر GSD نمونه برداری شدند. این کار برای افزایش میدان دید برای هر کاشی پهپاد آزمایشی با اندازه 256 × 256 پیکسل انجام شد. یک نقشه از مرزهای قابل مشاهده زمین برای هر کاشی ایجاد شد. دوم، نقشههای مرزی پیشبینیشده ارجاع داده شدند و بعداً ادغام شدند، زیرا این برای نقشهبرداری کاداستر ضروری است.
برای ارزیابی کیفیت نقشههای مرزی پیشبینیشده، آنها با مرزهای دیجیتالی دستی از تصویر ارتوام پهپاد مقایسه شدند. ارزیابی بر اساس یادآوری ، دقت و امتیاز F1 بود ، زیرا این یک رویکرد معقول و بدون ابهام در نظر گرفته میشود. نقشه های مرزی بافر (با 50 سانتی متر) و شطرنجی شدند و مقدار 0 برای کلاس “بدون مرز” و مقدار 1 برای کلاس “مرز” تعیین شد. نقشه های مرزی تولید شده توسط مدل CNN در ابتدا از 0 تا 1 متغیر بودند. بنابراین، نقشه های مرزی با مقدار آستانه ای که در آن “مرز” ≥ 0.3 و “مرز” ≥ 0.5 باشد، دوباره طبقه بندی شدند.
نقشه های مرزی با آستانه 0.3 مقادیر متعادل تری را برای یادآوری و دقت (و در عین حال نمره F1 بالاتر ) در مقایسه با پیش بینی های با آستانه 0.5 ( جدول 3 و جدول 4 ) ایجاد کردند. برای Ponova vas، امتیاز F1 0.60 برای آستانه 0.3 و نمره F1 0.55 برای آستانه 0.5 به دست آوردیم. در مورد اودرانچی، نتایج امتیاز F1 0.54 و 0.51 را برای آستانه 0.3 و 0.5 نشان داد. در اینجا شایان ذکر است که هرچه آستانه کلاس “مرز” بالاتر باشد، دقت بالاتر و فراخوان کمتر است.. برای نقشه برداری کاداستر، هر دو مقدار را می توان مرتبط در نظر گرفت زیرا یادآوری کامل بودن (تعداد مرزهای شناسایی شده در مقایسه با داده های مرجع) را نشان می دهد، در حالی که دقت نشان دهنده درستی مرزهای شناسایی شده است. با توجه به این موضوع، امتیاز F1 تا حد امکان مطلوب خواهد بود. آستانه می تواند به عنوان کمک یا تعادل بین یادآوری و دقت استفاده شود و بسته به هدف یا نیاز می تواند مورد استفاده قرار گیرد. به طور خلاصه، هر چه کامل بودن یا مرزهای شناسایی شده بیشتر باشد، صحت کمتر است و بالعکس.
نقشه های مرزی ایجاد شده با استفاده از یک CNN سفارشی شده (عمداً یک U-Net ساده شده) علاوه بر این با یک CNN بر اساس معماری اصلی U-net مقایسه شد [ 33 ]. این برای ارزیابی رویکرد اقتباس شده ما استفاده شد. نتایج بهدستآمده با U-Net اصلی برای هر دو نقشه مرزی آستانه نتایج بدتری را در مقایسه با مدل تطبیقشده ما نشان داد. بهترین نتایج برای نقشه های مرزی طبقه بندی شده با آستانه 0.3 به دست آمد، یعنی امتیاز F1 0.54 برای Ponova vas و امتیاز F1 0.49 برای Odranci.
تعیین امتیاز F1 کامل برای نقشه برداری کاداستر آسان نیست. اول از همه، همه مرزهای کاداستر قابل مشاهده نیستند. دوم، بستگی به منطقه ای دارد که مدل CNN در آن آزمایش می شود و صحنه هایی که پوشش می دهد، به عنوان مثال، روستایی، شهری یا مختلط. این همچنین هنگام مقایسه نتایج یک مطالعه با مطالعه دیگر صادق است، زیرا روش ها و مطالعات موردی متفاوت هستند، بنابراین مقایسه قابل اعتماد را غیرممکن می کند [ 27 ، 28 ]. با این حال، برای تجزیه و تحلیل های بیشتر، مانند بازنگری در مرزهای کاداستر موجود، نمره F1 60 برای تجزیه و تحلیل سریع، به ویژه در مناطق روستایی کافی در نظر گرفته می شود.
4.3. بازنگری داده های کاداترال موجود در مورد مرزهای زمین
مرزهای قابل مشاهده پیش بینی شده زمین با داده های رسمی، به عنوان مثال، مرزهای کاداستر، برای اصلاح نقشه های کاداستر فعلی مقایسه شد [ 39 ]. مرزهای کاداستر به همان شیوه ای که به صورت دستی مشخص شده اند، بافر و شطرنجی شدند. نقشههای مرزی که امتیاز F1 بالاتری را ارائه میکردند، برای اصلاح نقشههای کاداستر موجود در Ponova vas و Odranci، هر دو در اسلوونی، انتخاب شدند. این تجدید نظر بر اساس معیارهای مشابه، یعنی یادآوری ، دقت و امتیاز F1 بود . قبل از مقایسه مرزهای پیش بینی شده با مرزهای کاداستر، مقادیر مرجع با مقایسه مرزهای کاداستر با مرزهای زمین قابل مشاهده به صورت دستی در همان تصاویر پهپاد ایجاد شد.جدول 5 و جدول 6 ). این به این دلیل انجام شد که مرزهای دیجیتالی دستی دارای داده های کامل و صحیح فرض می شدند و به عنوان داده های حقیقت زمینی تعریف می شدند.
در مورد Ponova vas، حتی از طریق تفسیر بصری مشخص بود که نقشه کاداستر قدیمی شده است ( شکل 9 a). مرزهای زمین قابل مشاهده در حال حاضر (مرزهایی که استفاده از زمین را در سایت مشخص می کنند) با مرزهای کاداستر مطابقت نداشتند. این نیز توسط ارزیابی دقت تایید شد. نتایج ارائه شده در جدول 5 مقادیر بسیار پایینی را نشان می دهد، یعنی فراخوانی 0.06، دقت 0.10 و امتیاز F1 0.07 در مقایسه با مرزهای پیش بینی شده. تقریباً نتایج مشابهی هنگام مقایسه با داده های حقیقت زمینی به دست آمد ( یادآوری : 0.05، دقت : 0.09، امتیاز F1: 0.07). در این مورد، معیارهای بسیار کم، به ویژه یادآوری کم ، میتواند به عنوان شاخصی برای شناسایی مناطق خاصی که در آن بهروزرسانیهای کاداستر مورد نیاز است، تفسیر شود. علاوه بر این، معیارهای تولید شده در مقایسه با پیشبینیها نیز هیچ همپوشانی بین مرزهای قابل مشاهده و کاداستر را نشان نمیدهند (صرف نظر از این واقعیت که همه مرزهای قابل مشاهده به طور خودکار ایجاد نمیشوند). یک یادآوری بسیار کمنشان می دهد که باید در جهت های مرزهای کاداستر نیز مشکلی وجود داشته باشد و با وضعیت موجود مطابقت ندارد. به منظور تراز کردن مالکیت زمین و دادههای کاداستر (قانونی)، یک بازنگری پیچیده در دادههای کاداستر در Ponova vas با استفاده از ابزارهای قانونی کاداستر، مانند تنظیم دادههای کاداستر یا بازسازی قطعات زمین از طریق یکپارچهسازی زمین پیچیده، مورد نیاز است. برای این اهداف، داده های ارائه شده در مورد مرزهای زمین قابل مشاهده می تواند به عنوان داده های ورودی مهم، برای ایجاد یا به روز رسانی نقشه های کاداستر استفاده شود [ 16 ، 20 ].
در مورد Odranci، وضعیت کمی متفاوت است زیرا جهت مرزهای کاداستر با جهت مرزهای زمین قابل مشاهده مطابقت دارد ( شکل 10 a). نتایج یک یادآوری 0.21، دقت 0.49، و F1 0.29 را در مقایسه با مقادیر مرجع 0.37، 0.63 و 0.47 به دست آورد. از این معیارها، 37٪ از مرزهای زمین قابل مشاهده با مرزهای کاداستر همپوشانی دارند که با صحت 63٪ (بر اساس داده های حقیقت زمین) مطابقت دارد. CNN ما امتیاز F1 کمتری ارائه کرد که قابل انتظار بود، اما در عین حال برای تعیین همپوشانی مرزها کافی بود [ 3 ]. ارزش های یادآوری ودقت نشان داد که جهت و مکان مرزهای کاداستر با مرزهای قابل مشاهده مطابقت دارد. مقادیر کم برای همپوشانی می تواند به دلیل تکه تکه شدن بیش از حد باشد. بسیاری از بسته ها به قطعات کوچک تقسیم شدند در حالی که در تصاویر پهپاد زیر همان پوشش زمین نشان داده شدند. این از تفسیر بصری نیز مشهود بود. ادغام واحدهای زمین ساده شده با یکپارچگی زمین در Odranci ترجیح داده می شود، جایی که، دوباره، داده های ارائه شده در مورد مرزهای زمین قابل مشاهده می تواند به عنوان داده ورودی مهم عمل کند.
برای هر دو منطقه مورد مطالعه، نقشه های مرزی پیش بینی شده نیز با استفاده از تبدیل هاف بردار شدند ( شکل 11 ). علاوه بر بردارسازی، تبدیل Hough خطوط مستقیمی را ارائه کرد و برخی از شکاف ها را پر کرد – این نیز می تواند یک رویکرد ساده سازی در نظر گرفته شود. در این مطالعه از یک شکاف پرکننده 10 استفاده شد تا نتایج پیشبینیشده سوگیری نشود. علاوه بر این، افزایش ارزش برای پر کردن شکاف ها گاهی منجر به نتایج نامطلوب می شود. برداری برای نقشه برداری کاداستر بسیار مهم است زیرا امکان تجزیه و تحلیل بیشتر را فراهم می کند. در این مطالعه ارزیابی دقت بر اساس پیکسل انجام شد. مطالعات بیشتر میتواند بر مقایسه روشهای مبتنی بر پیکسل با روشهای مبتنی بر شی برای ارزیابی دقت تمرکز کند، مانند روش پوشش بافر [ 48 ]]، زمانی که مرزهای پیش بینی شده بردار شوند. در روش پوشش بافر، بافر را می توان در اطراف داده های کاداستر افزایش داد، که به آن تلورانس در کاربردهای کاداستر گفته می شود. این ممکن است بر ارزیابی کامل بودن تأثیری نداشته باشد زیرا این رویکرد بر اساس طولی است که در بافر قرار می گیرد. در روش مبتنی بر پیکسل، اگر عرض یا بافر دادههای مرجع افزایش یابد در حالی که پیشبینیها نازکتر هستند، این منجر به یک سوگیری در کامل و صحت میشود.
5. نتیجه گیری ها
در دهه گذشته، توجه زیادی به ایجاد نقشههای کاداستر و استقرار سیستمهای کاداستر، از جمله روشهای نوآورانه نقشهبرداری و نقشهبرداری شده است، اما کمتر به نگهداری و پایداری سیستمهای کاداستر پرداخته شده است. این مقاله بر روی نگهداری داده ها با بازنگری نقشه های کاداستر موجود با استفاده از یادگیری عمیق متمرکز شده است. کل گردش کار با آموزش CNN، شناسایی مرزهای زمین قابل مشاهده، ارجاع جغرافیایی، ارزیابی مدل و بردار کردن نقشههای مرزی پیشبینیشده، و بازنگری نقشههای کاداستر موجود، توسعه و ارائه شد. این مدل با تصاویر پهپاد آزمایش شد، اما رویکرد توسعهیافته میتواند برای تصاویر ماهوارهای یا هوایی نیز استفاده شود.
این رویکرد را می توان در شناسایی خودکار مناطقی که به روز رسانی نقشه های کاداستر نیاز است، کارآمد و مقرون به صرفه دانست. علاوه بر این، مرزهای زمین قابل مشاهده شناسایی شده می تواند به عنوان داده ورودی برای به روز رسانی داده های کاداستر یا سایر روش های کاداستر که می تواند برای نقشه برداری کاداستر، از جمله برای بازسازی قطعه زمین، استفاده شود، استفاده شود. مرزهای زمین قابل مشاهده شناسایی شده مرزهای نهایی کاداستر را نشان نمی دهد. آنها را می توان به عنوان مرزهای اولیه برای تجزیه و تحلیل سریع و ارائه عمومی از وضعیت فعلی هنر در نظر گرفت.
یکی از مشکلات اصلی اداره زمین در کشورهای توسعه یافته، به روز نگه داشتن سیستم کاداستر است. در اینجا، یک رویکرد خودکار که مناطقی را که چنین بهروزرسانیهایی مورد نیاز است شناسایی میکند، این چالش را برای NMCAها برجسته و محدود میکند. به طور کلی، میتوان گفت که روشهای خودکار سریعتر اما دقت کمتری دارند (پس از آموزش مدل)، در حالی که روشهای دستی ترسیم مرزها کندتر اما دقیقتر را ارائه میکنند. ترکیب روش های خودکار با اصلاحات دستی می تواند تلاش کاربر را کاهش دهد و همچنان دقت بالایی را ارائه دهد. با این حال، هنگام بازنگری مرزهای کاداستر موجود، یک رویکرد خودکار قطعا برای بسیاری از NMCA ها مطلوب است. همچنین باید تکرار شود که تمام مرزهای کاداستر در تصاویر سنجش از راه دور قابل مشاهده نیستند و نمی توان همه آنها را به طور خودکار شناسایی یا استخراج کرد. از این رو،
مشارکت های نویسنده
مفهوم سازی، بوجار فتائی و آنکا لیسک; روش شناسی، بوجار فتایی; نرم افزار، بوجار فتایی و دژان گریگیلو; اعتبارسنجی، بوجار فتای، دژان گریگیلو و آنکا لیزک. تحلیل رسمی، بوجار فتائی و آنکا لیسک; تحقیق، بوجار فتایی; منابع، Bujar Fetai و Anka Lisec; گزینش داده، بوجار فتائی و آنکا لیسک. نگارش – تهیه پیش نویس اصلی، بوجار فتایی; نگارش-بررسی و ویرایش، بوجار فتائی، دژان گریگیلو و آنکا لیسک. تجسم، بوجار فتایی; نظارت، Anka Lisec. همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
منابع مالی
این تحقیق و APC توسط آژانس تحقیقات اسلوونی (با بودجه هسته تحقیقاتی کمک مالی رصد زمین و ژئوانفورماتیک شماره P2-0406) و توسط آژانس تحقیقات اسلوونی و سازمان نقشه برداری و نقشه برداری جمهوری اسلوونی (تحقیقات پروژه شماره V2-1934) تامین مالی شد. .
بیانیه هیئت بررسی نهادی
قابل اجرا نیست.
بیانیه رضایت آگاهانه
قابل اجرا نیست.
بیانیه در دسترس بودن داده ها
دادههای ارائهشده در این مطالعه بهطور آشکار در پیوند ( https://unilj-my.sharepoint.com/:f:/g/personal/bfetai_fgg_uni-lj_si/ErN_s1uLnidMmdyGk2ZPk8oBKEyFDzbT7wQ6PpS2yr9k-Q0?e ، 2 March2yr9k-PJO=m) در دسترس هستند. ; داده های آموزشی در [ 34 ]; و داده های رسمی کاداستر در [ 39 ].
قدردانی
این تحقیق بخشی از دوره دکتری می باشد. پایان نامه نویسنده مسئول. ما از بازبینان ناشناس برای نظرات و پیشنهادات روشنگرانه آنها تشکر می کنیم. ما از Klemen Kozmus Trajkovski برای گرفتن داده های UAV و Matej Račič برای پشتیبانی فنی قدردانی می کنیم.
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند. تامین کنندگان مالی هیچ نقشی در طراحی مطالعه نداشتند. در جمع آوری، تجزیه و تحلیل یا تفسیر داده ها؛ در نوشتن دستنوشته یا تصمیم به انتشار نتایج.
منابع
- Enemark، S. بل، KC؛ لمن، سی. مک لارن، آر. مدیریت زمین مناسب برای هدف: انتشارات مشترک فیگ/بانک جهانی ؛ شکل: کپنهاگ، دانمارک، 2014; شابک 978-87-92853-10-3/978-87-92853-11-0. [ Google Scholar ]
- ویلیامسون، مدیریت زمین IP برای توسعه پایدار ، ویرایش اول. ESRI Press Academic: Redlands, CA, USA, 2010; ISBN 9781589480414. [ Google Scholar ]
- لو، ایکس. بنت، آر. کووا، م. لمن، سی. Quadros، N. کمی کردن همپوشانی بین مرزهای کاداستر و بصری: مطالعه موردی از وانواتو. علوم شهری 2017 ، 1 ، 32. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Enemark، S. مدیریت زمین و سیستم های کاداستر در حمایت از حاکمیت زمین پایدار: یک رویکرد جهانی. در مجموعه مقالات سومین مجمع آمایش سرزمین برای منطقه آسیا و اقیانوسیه، تهران، ایران، 24-26 مه 2009; صص 53-71. [ Google Scholar ]
- سیمبیزی، MCD; بنت، آر.ام. Zevenbergen، J. امنیت مالکیت زمین: بازبینی و اصلاح مفهوم برای فقرای روستایی جنوب صحرای آفریقا. سیاست کاربری زمین 2014 ، 36 ، 231-238. [ Google Scholar ] [ CrossRef ]
- گرانت، دی. Enemark، S. زونبرگن، جی. میچل، دی. مک کملی، جی. مدل مثلثی کاداستر. خط مشی استفاده از زمین 2020 , 97 , 104758. [ Google Scholar ] [ CrossRef ]
- Enemark، S. مک لارن، آر. Lemmen, C. مدیریت زمین مناسب برای هدف – ارائه حقوق امن زمین در مقیاس. Land 2021 , 10 , 972. [ Google Scholar ] [ CrossRef ]
- هیپکه، سی. وودسفورد، PA; Gerke, M. به روز رسانی پایگاه داده های جغرافیایی از تصاویر. در پیشرفت در فتوگرامتری، سنجش از دور و علوم اطلاعات مکانی: کتاب کنگره ISPRS 2008 ; Baltsavias, E., Li, Z., Chen, J., Eds. CRC Press: لندن، انگلستان، 2008; شابک 978-0-415-47805-2/978-0-203-88844-5. [ Google Scholar ]
- کوچور برا، ک. Frąszczak، H. انسجام داده های کاداستر در مدیریت زمین – مطالعه موردی مناطق روستایی در لهستان. Land 2021 , 10 , 399. [ Google Scholar ] [ CrossRef ]
- بنت، آر.ام. کووا، م. آسیاما، ک. بررسی سنجش از دور برای اداره زمین: ریشه ها، بحث ها، و موارد منتخب. Remote Sens. 2021 , 13 , 4198. [ Google Scholar ] [ CrossRef ]
- کووا، م. استوکر، سی. کروملینک، اس. چیپوفیا، م. کوندرت، ک. شورینگ، آ. صاحب، ج. زین، تی. تیم، سی. همایون، م. و همکاران راه حل های ابداعی جغرافیایی برای نقشه برداری زمین. RJESTE 2020 ، 3 ، 34-49. [ Google Scholar ] [ CrossRef ]
- استوکر، سی. بنت، آر. کووا، م. نکس، اف. Zevenbergen، J. افزایش پهپادها برای اداره زمین: به سمت فلات بهره وری. خط مشی استفاده از زمین 2022 ، 114 ، 105930. [ Google Scholar ] [ CrossRef ]
- Zevenbergen، J. مجموعه مقالات اداره زمین: برای مشاهده تغییر از روز به روز: سخنرانی افتتاحیه توسط Jaap Zevenbergen، استاد سیستم های مدیریت زمین، Enschede، هلند، 22 آوریل 2009. ITC: Enschede, The Netherlands, 2009. ISBN 978-90-6164-274-9.
- لو، ایکس. بنت، آر.ام. کووا، م. لمن، سی. بررسی استخراج مرزهای کاداستر نیمه خودکار از داده های اسکن شده لیزری هوابرد. Land 2017 , 6 , 60. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Zevenbergen، J. رویکرد سیستمی به ثبت زمین و کاداستر. نورد. J. Surv. Results Estate Res. 2004 ، 1 ، 11-24. [ Google Scholar ]
- کروملینک، اس. بنت، آر. گرکه، ام. نکس، اف. یانگ، م. Vosselman, G. بررسی استخراج ویژگی های خودکار از داده های حسگر نوری با وضوح بالا برای نقشه برداری کاداستر مبتنی بر پهپاد. Remote Sens. 2016 ، 8 ، 689. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کهلی، د. بنت، آر. لمن، سی. مورالس، آ. پینیرو، آ. Zevenbergen, J. مقایسه کمی بسته های کاداستری کاملاً قابل مشاهده با استفاده از تصاویر ماهواره ای: گامی به سوی اتوماسیون. در مجموعه مقالات هفته کاری FIG 2017، هلسینکی، فنلاند، 29 مه تا 2 ژوئن 2017. صص 1-14. [ Google Scholar ]
- رمضانی، س. بنت، آر.ام. Nex, FC Exploring UAV در جمع آوری داده های مرزی کاداستر اندونزی. علوم زمین به اطلاع رساندن. 2018 ، 11 ، 129-146. [ Google Scholar ] [ CrossRef ]
- کاسیانو فلورس، سی. تان، ای. Crompvoets، J. ارزیابی حاکمیت اجرای پهپاد در سیستم مدیریت زمین کنیا. Technology in Society 2021 , 66 , 101664. [ Google Scholar ] [ CrossRef ]
- کووا، م. مونزا، م. گوارت، سی. گرکه، ام. Nex, F. استفاده از پهپاد برای ایجاد و به روز رسانی نقشه. مطالعه موردی در رواندا Surv. Rev. 2018 , 50 , 312-325. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- استوکر، سی. نکس، اف. کووا، م. Gerke, M. Orthophotos با کیفیت بالا مبتنی بر پهپاد برای نقشه برداری کاداستر: راهنمایی برای تنظیمات پرواز بهینه. Remote Sens. 2020 , 12 , 3625. [ Google Scholar ] [ CrossRef ]
- ریجسدیک، ام. ون هینسبرگ، WHM; ویتوین، دبلیو. بورن، GHM; Schakelaar، GA; پوپینگا، جی. ون پرسی، ام. Ladiges, R. سیستم های هوایی بدون سرنشین در فرآیند تأیید حقوقی مرز کاداستر. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2013 ، XL-1/W2 ، 325–331. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کروملینک، اس. بنت، آر. گرکه، ام. یانگ، م. Vosselman، G. تشخیص کانتور برای نقشه برداری کاداستر مبتنی بر پهپاد. Remote Sens. 2017 , 9 , 171. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پونیاچ، ای. بیدا، ا. Ćwiąkała، P. Kwartnik-Pruc، A.; پرزیچ، ص. استفاده از وسایل نقلیه هوایی بدون سرنشین (پهپاد) برای به روز رسانی داده های کاداستر زمین های کشاورزی در مناطق در معرض زمین لغزش. IJGI 2018 ، 7 ، 331. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مانووکی، ام. تیلر، پی. استودلر، دی. Eisenbeiss, H. هواپیمای بدون سرنشین در کاربردهای کاداستر. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2011 ، XXXVIII-1/C22 ، 57-62. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- واسی، YA; کووا، MN; بنت، آر.ام. Lemmen, CHJ رویه ای برای استخراج ویژگی های مرزی نیمه خودکار کاداستر از تصاویر ماهواره ای با وضوح بالا. جی. اسپات. علمی 2018 ، 63 ، 75-92. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کروملینک، اس. کووا، م. یانگ، من؛ Vosselman, G. کاربرد یادگیری عمیق برای ترسیم مرزهای مرئی کاداستر از تصاویر سنجش از دور. Remote Sens. 2019 ، 11 ، 2505. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Xia، X. پرسلو، سی. کووا، ام. شبکه های کاملاً پیچیده عمیق برای تشخیص مرزهای کاداستر از تصاویر پهپاد. Remote Sens. 2019 ، 11 ، 1725. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فتایی، ب. راچیچ، م. Lisec، A. یادگیری عمیق برای تشخیص مرزهای زمین قابل مشاهده از تصاویر پهپاد. Remote Sens. 2021 , 13 , 2077. [ Google Scholar ] [ CrossRef ]
- ما، ال. لیو، ی. ژانگ، ایکس. بله، ی. یین، جی. جانسون، کارشناسی یادگیری عمیق در کاربردهای سنجش از دور: یک متاآنالیز و بررسی. ISPRS J. Photogramm. Remote Sens. 2019 , 152 , 166–177. [ Google Scholar ] [ CrossRef ]
- گارسیا-گاسولا، دی. پارس، اف. ویلالتا، ا. مورنو، جی. آیگواده، ای. لابارتا، جی. کورتس، U. Suzumura, T. در مورد رفتار شبکه های کانولوشن برای استخراج ویژگی. Jair 2018 , 61 , 563-592. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پارک، اس. Song، A. تجزیه و تحلیل اختلاف برای شناسایی قطعات نامزدی که نیاز به به روز رسانی رده زمین در نقشه کاداستر دارند با استفاده از تصاویر UAV فراطیفی: مطالعه موردی در Jeonju، کره جنوبی. Remote Sens. 2020 , 12 , 354. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رونبرگر، او. فیشر، پی. Brox، T. U-Net: شبکه های کانولوشن برای تقسیم بندی تصویر زیست پزشکی. 2015. در دسترس آنلاین: https://arxiv.org/pdf/1505.04597v1 (در 22 فوریه 2022 قابل دسترسی است).
- آربلاز، پ. فاولکس، سی. مارتین، دی. مجموعه داده های تقسیم بندی برکلی و معیار. در دسترس آنلاین: https://www2.eecs.berkeley.edu/Research/Projects/CS/vision/bsds/ (در 2 مارس 2022 قابل دسترسی است).
- Google Collaboratory در دسترس آنلاین: https://colab.research.google.com (در 6 دسامبر 2021 قابل دسترسی است).
- Chollet، F. دیگران. کراس _ 2015. در دسترس آنلاین: https://keras.io (در 29 آوریل 2021 قابل دسترسی است).
- آبادی، م. آگاروال، ا. برهم، پ. برودو، ای. چن، ز. سیترو، سی. کورادو، جی اس. دیویس، ا. دین، جی. دوین، ام. و همکاران TensorFlow: یادگیری ماشینی در مقیاس بزرگ در سیستمهای ناهمگن. 2015. در دسترس آنلاین: https://www.tensorflow.org/ (دسترسی در 10 دسامبر 2021).
- تیم توسعه GRASS. GRASS GIS آوردن فن آوری های پیشرفته زمین فضایی به جهان، نسخه 7.8 . بنیاد زمین فضایی منبع باز: Beaverton، OH، ایالات متحده، 2020. [ Google Scholar ]
- نقشه برداری; سازمان نقشه برداری جمهوری اسلوونی. داده های نقشه برداری الکترونیکی داده های نقشه برداری الکترونیکی در دسترس آنلاین: https://egp.gu.gov.si/egp/?lang=en (در 17 ژانویه 2022 قابل دسترسی است).
- مشارکت کنندگان GDAL/OGR. کتابخانه نرم افزار انتزاع داده های جغرافیایی GDAL/OGR . 2021. در دسترس آنلاین: https://gdal.org (دسترسی در 20 ژانویه 2022).
- Gillies، S. Rasterio: Geospatial Raster I/O برای برنامه نویسان پایتون . 2013. در دسترس آنلاین: https://github.com/mapbox/rasterio (در 4 فوریه 2022 قابل دسترسی است).
- هریس، CR; میلمن، کی جی. ون در والت، اس جی; گومرز، آر. ویرتانن، پی. کورناپو، دی. ویزر، ای. تیلور، جی. برگ، اس. اسمیت، نیوجرسی؛ و همکاران برنامه نویسی آرایه با NumPy. طبیعت 2020 ، 585 ، 357–362. [ Google Scholar ] [ CrossRef ]
- ضرر در مقابل دقت در دسترس آنلاین: https://kharshit.github.io/blog/2018/12/07/loss-vs-accuracy (دسترسی در 3 فوریه 2022).
- دودا، روسی. هارت، PE استفاده از تبدیل هاف برای تشخیص خطوط و منحنی ها در تصاویر. اشتراک. ACM 1972 ، 15 ، 11-15. [ Google Scholar ] [ CrossRef ]
- هاف، روش پی وی سی و ابزاری برای شناخت الگوهای پیچیده. پتنت ایالات متحده شماره 3.069.654، 18 دسامبر 1962. [ Google Scholar ]
- کیم، شمال غربی؛ لی، جی. لی، اچ. Seo, J. تقسیم بندی دقیق مناطق زمین در نقشه های کاداستر تاریخی. J. Vis. اشتراک. تصویر نشان می دهد. 2014 ، 25 ، 1262-1274. [ Google Scholar ] [ CrossRef ]
- هونگ، آر. پارک، جی. جانگ، اس. شین، اچ. کیم، اچ. آهنگ، I. توسعه یک الگوریتم استخراج مرز زمین در سطح قطعه برای تصویربرداری هوایی از مناطق کشاورزی منظم. Remote Sens. 2021 , 13 , 1167. [ Google Scholar ] [ CrossRef ]
- هیپکه، سی. مایر، اچ. Wiedemann, C. ارزیابی استخراج خودکار جاده. اینتر قوس. فتوگرام Remote Sens. 1997 , 32 , 1-10. [ Google Scholar ]
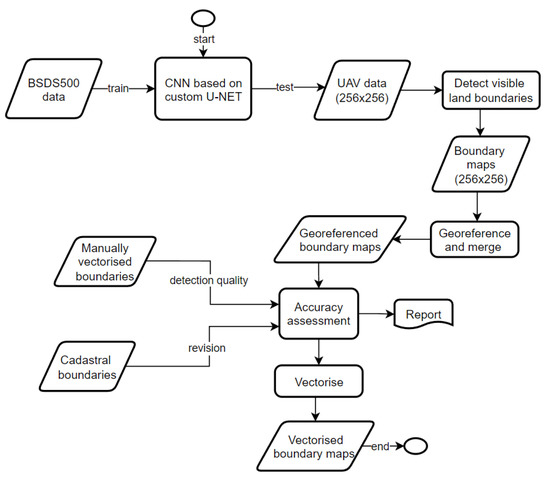
شکل 1. گردش کار تعمیم یافته اعمال شده در این مطالعه.
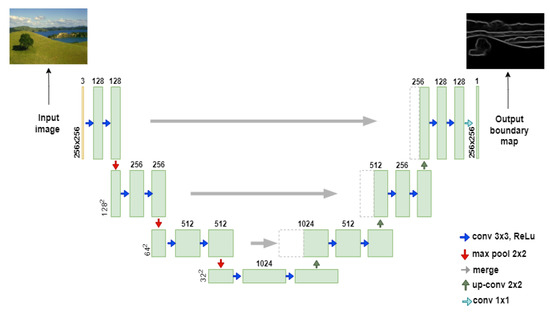
شکل 2. شبکه عصبی کانولوشن (CNN) بر اساس معماری سفارشی U-Net.
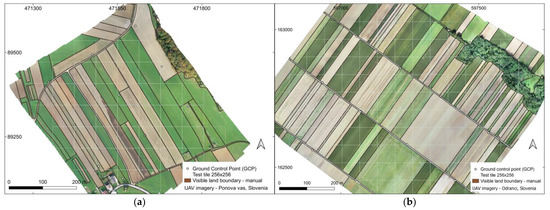
شکل 3. مرزهای زمین قابل مشاهده به صورت دستی مشخص شده است. ( الف ) تصوير ارتومي پهپاد با فاصله نمونهبرداري از زمين (GSD) 0.25 متر Ponova vas، اسلووني. ( ب ) تصوير ارتومي پهپاد با GSD 0.25 متر براي Odranci، اسلووني. ( a , b ) (EPSG 3794).
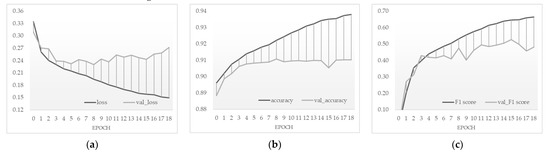
شکل 4. عملکرد U-Net سفارشی شده: ( الف ) ضرر ، ( ب ) دقت ، و ( ج ) امتیاز F1 برای مدل دقیق تنظیم شده ما.
شکل 5. نقشه های مرزی ارجاع شده و ادغام شده برای منطقه آزمایشی در ( a ) Ponova vas، اسلوونی. نقشه مرزی پیشبینیشده با ( ب ) CNN سفارشیشده، و ( ج ) معماری اصلی U-Net.
شکل 6. نقشه های مرزی جغرافیایی مرجع و ادغام شده برای منطقه آزمایشی در ( a ) Odranci، اسلوونی. نقشه مرزی پیشبینیشده با ( ب ) CNN سفارشیشده، و ( ج ) معماری اصلی U-Net.
شکل 7. ( الف ) تصویر حقیقت زمینی برای Ponova vas، اسلوونی. ( ب ، ج ) نقشههای مرزی طبقهبندیشده با CNN سفارشیشده: ( ب ) با آستانه «مرز» ≥ 0.3، و ( ج ) با آستانه «مرز» ≥ 0.5.
شکل 8. ( الف ) تصویر حقیقت زمینی برای اودرانچی، اسلوونی. ( ب ، ج ) نقشههای مرزی طبقهبندیشده با CNN سفارشیشده: ( ب ) با آستانه 0.3، و ( c ) با آستانه 0.5.
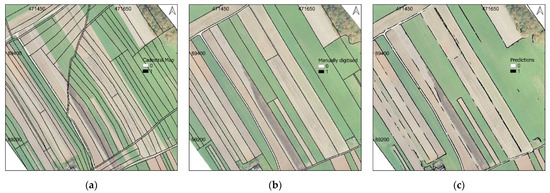
شکل 9. بازنگری نقشه کاداستر در Ponova vas: ( الف ) مرزهای کاداستر. ( ب ) مرزهای مرئی بردار دستی. و ( ج ) مرزهای قابل مشاهده پیش بینی شده با CNN سفارشی. ( الف – ج ) روی تصاویر پهپاد پوشانده شده است.
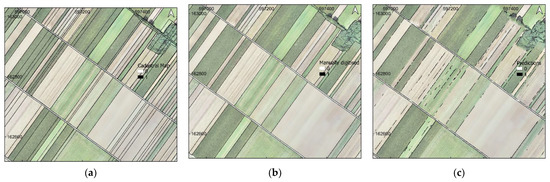
شکل 10. بازنگری نقشه کاداستر در اودرانچی: ( الف ) مرزهای کاداستر. ( ب ) مرزهای مرئی بردار دستی. و ( ج ) مرزهای قابل مشاهده پیش بینی شده با CNN سفارشی. ( الف – ج ) روی تصاویر پهپاد پوشانده شده است.
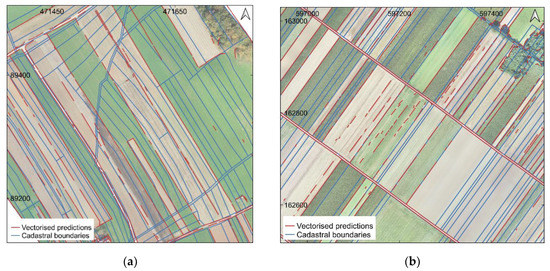
شکل 11. پیش بینی های برداری که با مرزهای کاداستر پوشانده شده اند: ( الف ) نقشه اختلاف برای Ponova vas. ( ب ) نقشه اختلاف برای Odranci.


بدون دیدگاه