

خلاصه
کلید واژه ها:
تحرک وسیله نقلیه ؛ تاب آوری ; تحلیل مکانی – زمانی سنسورهای نظارت بر ترافیک شبکه های حسگر
1. معرفی
-
این مقاله درک ما از قابلیت مشاهده انعطاف پذیر سیستمهای حسگر نظارت بر ترافیک را بهبود میبخشد و نویدی را برای گسترش نحوه تصمیمگیری در مورد طراحی و مدیریت چنین سیستمهایی در پروژههای مقیاس بزرگ نشان میدهد.
-
محدودیتهای شناساییشده دادهها و سیستمهای حسگر میتواند برای پروژههای تحرک شهری مشابه مفید باشد. به عنوان اخطار برای پروژههای آتی، باید توجه ویژهای به این محدودیتها و پیامدها در مراحل اولیه پروژهها به شیوهای فعالتر و محتاطانهتر شود.
2. بررسی ادبیات
2.1. تجزیه و تحلیل داده محور بر روی الگوهای تحرک خودرو
2.2. انعطاف پذیری در سیستم های حسگر
3. روش ها
3.1. شبکه های حسگر و معیارهای مرکزیت
معیارهای مرکزیت را می توان به عنوان معیارهایی برای محک زدن اهمیت نسبی گره ها یا لبه ها در یک شبکه [ 48 ] در نظر گرفت. معیارهای مختلفی برای مرکزیت در تحقیقات شبکه ارائه شده است، مانند مرکزیت درجه، مرکزیت بین، مرکزیت نزدیک و غیره. در اینجا از دو معیار مرکزیت گرهی، یعنی مرکزیت درجه و مرکزیت بین، برای به تصویر کشیدن اهمیت گره ها در شبکه های حسگر مفهومی استفاده کردیم. درجه گره تعداد کل همسایگان متصل گره مورد نظر را اندازه گیری می کند. بنابراین، این شاخص مرکزیت تعداد سنسورهایی که از طریق حرکت خودرو به یک سنسور معین متصل شده اند را اندازه گیری می کند. برای شبکه ای از N گره، درجه کمنگره i را می توان به صورت زیر بیان کرد:
مرکزیت بینابینی نقش اساسی در علم شبکه ایفا می کند، به ویژه در شبکه های حمل و نقل مانند شبکه های برخورد جاده ای و مسافرتی [ 49 ، 50 ]. این معیار شبکه نشان میدهد که یک گره چقدر میتواند از نظر کوتاهترین مسیرها در یک شبکه معین مهم باشد، یعنی تعداد تمام کوتاهترین مسیرهایی است که از آن گره عبور میکنند. گرههایی با مرکزیت بینالمللی بالا تأثیر زیادی بر اتصال و دسترسی کلی شبکه دارند. به عنوان مثال، در شبکه های حمل و نقل، حذف آن گره هایی که بین آنها زیاد است، تأثیرات قابل توجهی بر حرکت وسیله نقلیه خواهد داشت. بنابراین، توجه به این معیار مرکزیت در شبکه های حسگر بسیار جالب است. مرکزیت بین یک گره iبه صورت زیر داده می شود:
که در آن a و b دو گره از این شبکه هستند که نمی توانند گره i باشند ، σآ،بتعداد کل کوتاهترین مسیرها از گره a به گره b و استσآ،بمنتعداد کل کوتاهترین مسیرهایی است که از گره i می گذرد .
3.2. پارادایم و ارزیابی تاب آوری
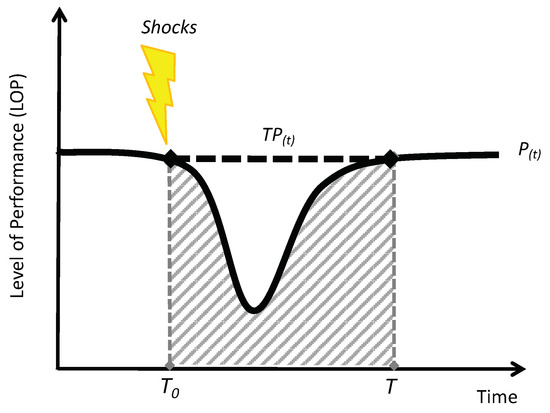
بسیاری از معیارهای انعطافپذیری برای سیستمهای زیرساختی مختلف، مانند سیستمهای جاده شهری [ 4 ]، سیستمهای انرژی [ 51 ] و سیستمهای سایبری [ 52 ] ساخته شدهاند. جدا از آن معیارهای انعطافپذیری وابسته به زمینه، چندین معیار تابآوری عمومی نیز برای سیستمهای تعمیمیافته پیشنهاد شدهاند که بهویژه برای هدف ما از ارزیابی انعطافپذیری شبکههای حسگر مناسب هستند. ما معیار عمومی پیشنهاد شده توسط Ouyang و Duenas-Osorio [ 53 ] را به دو دلیل انتخاب کردیم: (1) این معیار یکی از محبوبترین و پرکاربردترین ابزارها برای ارزیابی تابآوری است که از اثربخشی و سادگی بالایی برخوردار است. (2) این متریک محدوده عددی خود را در داخل محدود می کند [0،1]به عنوان یک نسبت بین سطح عملکرد واقعی ( پ(تی)) و سطح عملکرد هدف ( تیپ(تی)) که برای تجزیه و تحلیل مقایسه ای در موارد مختلف بصری و آسان است. این متریک تاب آوری سیستم را با یک شاخص تاب آوری (RI) کمی می کند و می توان آن را به صورت زیر بیان کرد.
که در آن، T کل زمان مشاهده است، پ(تی)سطح عملکرد واقعی در زمان t است و تیپ(تی)سطح عملکرد هدف یا مورد انتظار در زمان t است.
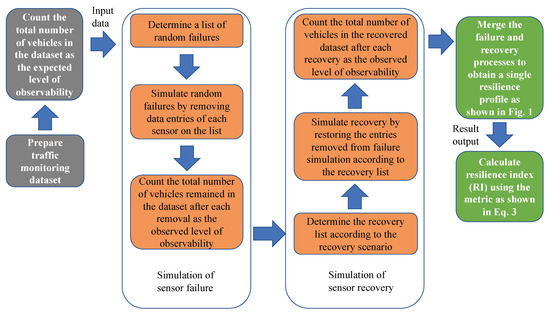
3.3. شبیه سازی تاب آوری
-
سناریو 1- مورد کنترل: مورد کنترل به عنوان حملات تصادفی با بازیابی اولین شکست-اول-اول- تعمیر طراحی شده است. این سناریو شهودیترین و اساسیترین استراتژی را شبیهسازی میکند [ 56 ]، که در آن میتوان حسگرهای خراب را با توجه به ترتیب خرابیهایشان تعمیر کرد، بهعنوان مثال، به نوبه خود، ابتدا سنسورها از کار افتادند، پس از تکمیل مجموعه اولیه خرابیها، ابتدا تعمیر میشوند.
-
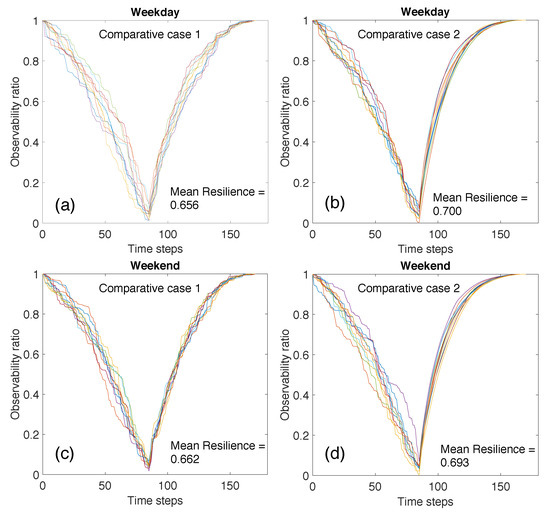
سناریو 2 – موارد مقایسه ای: این سناریو به عنوان حملات تصادفی با بازیابی ترجیحی [ 57 ] طراحی شده و از دو مورد مقایسه ای تشکیل شده است. مورد مقایسه ای 1 این است که با یک توالی ترجیحی از سنسورهای شکست خورده با توجه به مرکزیت بین سنسورها در شبکه بازیابی شود، به عنوان مثال، دنباله بازیابی سنسورهای خراب از رتبه نزولی مرکزیت بین بودن سنسورهای شکست خورده پیروی می کند. مورد مقایسه ای 2 این است که با یک توالی ترجیحی از سنسورهای شکست خورده مطابق با حجم ترافیک در سطح حسگر بازیابی شود، به عنوان مثال، توالی بازیابی از رتبه نزولی مشاهده پذیری هر حسگر منفرد پیروی می کند.
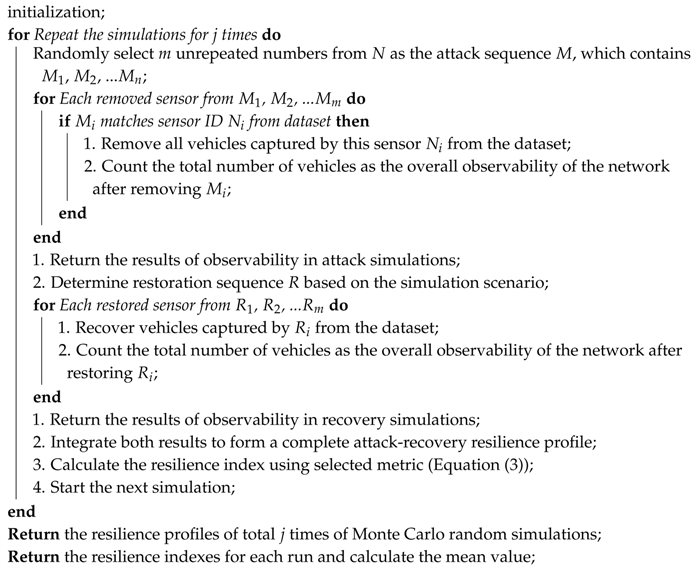
از آنجایی که ما بهطور تصادفی حسگرهایی را برای خرابی در شبکه انتخاب میکنیم، هر شبیهسازی نتیجهای کمی متفاوت به همراه خواهد داشت. بنابراین، ما تکنیکهای مونت کارلو را برای جبران عدم قطعیت تصادفی هنگام شبیهسازی خرابیهای تصادفی در شبکههای حسگر به کار بردیم. مزیت این روش این است که از طریق نمونه گیری تصادفی مکرر می توان به نتایج معناداری دست یافت. از نظر فنی، با توجه به اینکه ما حملات تصادفی m را بر روی یک شبکه حسگر از n گره شبیه سازی می کنیم ( ن={1،2،3،…،n}) و j بار نمونه برداری تصادفی را در شبیه سازی مونت کارلو تکرار می کنیم، می توان آن را به صورت شبه کد زیر اجرا کرد (الگوریتم 1). برای هر اجرا، می توانیم از رابطه (3) برای محاسبه یک RI استفاده کنیم. مساحت زیر منحنی با استفاده از تابع ادغام عددی ذوزنقه ای در Matlab محاسبه شد. این تابع انتگرال تقریبی یک تابع را با استفاده از روش ذوزنقه ای با فاصله واحد محاسبه می کند [ 58 ]. سپس میانگین عددی نمرات انعطافپذیری را میتوان برای j بار تکرار در هر سناریو به دست آورد تا به یک RI نهایی معنادار دست یافت.
| الگوریتم 1: شبه کد برای شبیه سازی مونت کارلو. |
 |
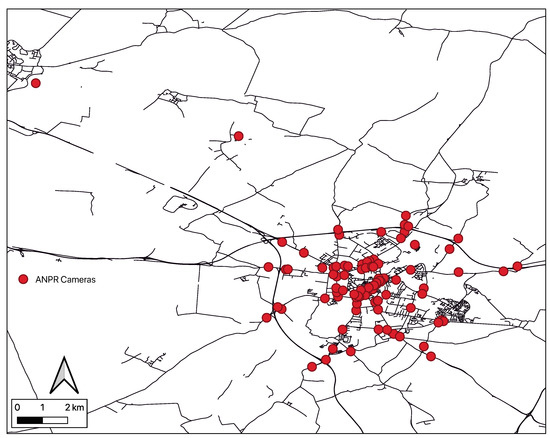
4. منطقه مطالعه و توصیف داده ها
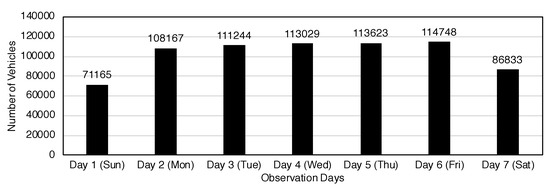
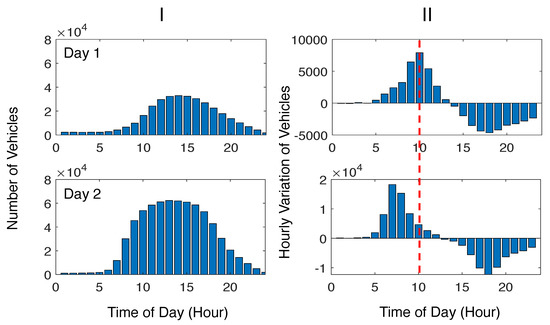
5. الگوهای حرکت مکانی-زمانی خودرو
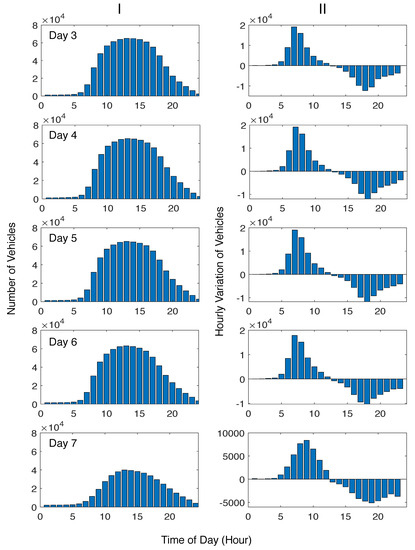
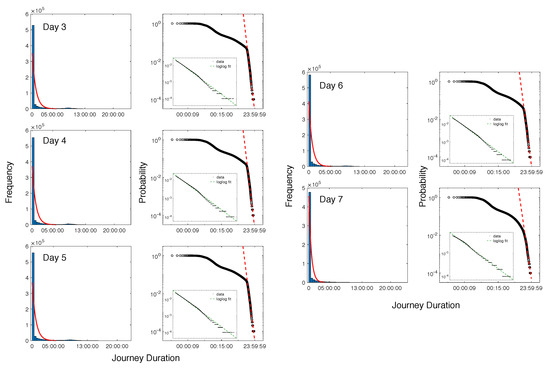
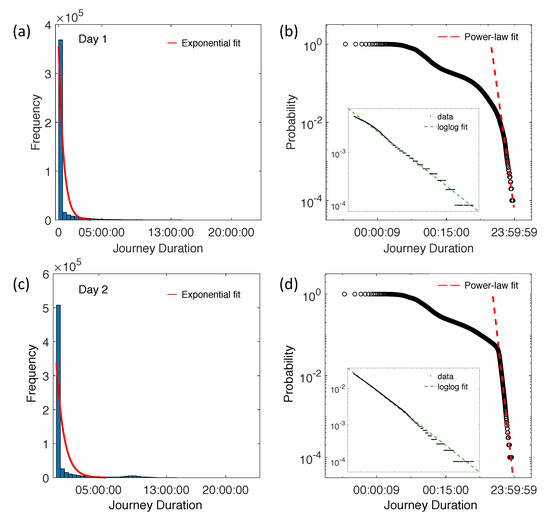
5.1. تحلیل زمانی
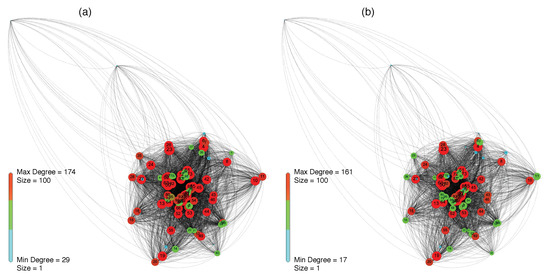
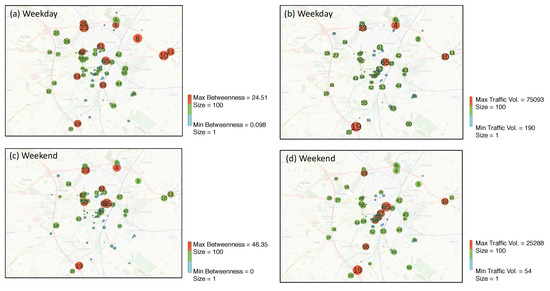
5.2. تحلیل فضایی
6. قابلیت مشاهده انعطاف پذیر شبکه های حسگر
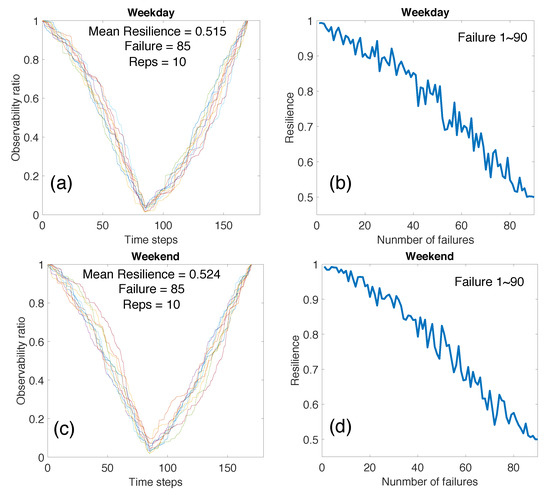
6.1. سناریو 1: مورد کنترل
6.2. سناریو 2: موارد مقایسه ای
7. بحث و نتیجه گیری
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| جی پی اس | سیستم موقعیت یاب جهانی |
| KPI | شاخص کلیدی عملکرد |
| RI | شاخص تاب آوری |
| ANPR | تشخیص خودکار پلاک |
| HGV | وسیله نقلیه کالاهای سنگین |
| VRN | شناسه خودرو |
پیوست اول
منابع
- گیورگی، ک. آتیلا، ا. تاماس، اف. چارچوب جدید برای نظارت بر تحرک شهری در شهرهای اروپایی. ترانسپ Res. Proc. 2017 ، 24 ، 155-162. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیون، جی. هوشمند شدن در مورد تحرک شهری – همراستایی با پارادایم های هوشمند و پایدار. حمل و نقل. Res. A-Pol. 2018 ، 115 ، 4-14. [ Google Scholar ] [ CrossRef ]
- فلمینگ، الف. موردی برای … ساختن شهرهای «گنگ» با فناوری پایین به جای شهرهای «هوشمند». در دسترس آنلاین: https://www.theguardian.com/cities/2020/jan/15/the-case-for-making-low-tech-dumb-cities-instead-of-smart-ones (در 16 آوریل 2020 قابل دسترسی است ).
- تانگ، جی. ارزیابی تاب آوری در سیستم های پیچیده شهری. در دایره المعارف اهداف توسعه پایدار سازمان ملل: صنعت، نوآوری و زیرساخت ؛ Leal Filho, W., Azul, A., Brandli, L., Özuyar, P., Wall, T., Eds.; Springer: Cham، سوئیس، 2019; صص 1-10. [ Google Scholar ]
- ژائو، ک. تارکوما، اس. لیو، اس. Vo, H. داده کاوی تحرک انسانی شهری: یک مرور کلی. در مجموعه مقالات کنفرانس بین المللی IEEE در سال 2016 درباره داده های بزرگ (Big Data)، واشنگتن دی سی، ایالات متحده، 5 تا 8 دسامبر 2016؛ صفحات 1911-1920. [ Google Scholar ]
- هوگینگ، اچ. گلنسور، ک. Lah, O. نیاز به ارزیابی کل نگر از اقدامات تحرک شهری – بررسی روش های موجود و طراحی یک رویکرد ساده شده. ترانسپ Res. Proc. 2014 ، 4 ، 3-13. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سان، ال. Axhausen، KW درک الگوهای تحرک شهری با چارچوب فاکتورسازی تانسور احتمالی. حمل و نقل. Res. B Meth. 2016 ، 91 ، 511-524. [ Google Scholar ] [ CrossRef ]
- کومار، دی. وو، اچ. لو، ی. کریشناسوامی، اس. Palaniswami، M. درک تحرک شهری از طریق خوشه بندی سفرهای تاکسی. در مجموعه مقالات 2016 هفدهمین کنفرانس بین المللی IEEE در مدیریت داده های تلفن همراه (MDM)، پورتو، پرتغال، 13 تا 16 ژوئن 2016؛ صص 318-324. [ Google Scholar ]
- کومار، دی. وو، اچ. راجاسگرار، س. لکی، سی. کریشناسوامی، اس. Palaniswami، M. خوشهبندی مسیر دادههای بزرگ سریع و مقیاسپذیر برای درک تحرک شهری. IEEE Trans. هوشمند ترانسپ 2018 ، 19 ، 3709–3722. [ Google Scholar ] [ CrossRef ]
- یانگ، تی. جین، ی. یان، ال. Pei, P. آرزوها و واقعیت های توسعه چندمرکزی: بینش از داده های چند منبعی به شکل شهری در حال ظهور شانگهای. محیط زیست برنامه ریزی کنید. B 2019 ، 46 ، 1264-1280. [ Google Scholar ] [ CrossRef ]
- سرنا، ا. Gerrikagoitia، JK; برنابه، U. رویز، تی. تجزیه و تحلیل پایداری در تحرک شهری بر اساس محتوای رسانه های اجتماعی. ترانسپ Res. Proc. 2017 ، 24 ، 1-8. [ Google Scholar ] [ CrossRef ]
- اوسوریو-آرجونا، جی. García-Palomares, JC رسانه های اجتماعی و تحرک شهری: استفاده از توییتر برای محاسبه ماتریس های سفر خانه-کار. شهرها 2019 ، 89 ، 268–280. [ Google Scholar ] [ CrossRef ]
- جرونیمو، CLM; کامپلو، CEC؛ د سوزا باپتیستا، سی. استفاده از داده های باز برای تحلیل تحرک شهری از شبکه های اجتماعی. J. Inf. مدیریت داده ها 2017 ، 8 ، 83-99. [ Google Scholar ]
- تانگ، جی. لیو، اف. وانگ، ی. وانگ، اچ. کشف تحرک انسان شهری از داده های جی پی اس تاکسی در مقیاس بزرگ. فیزیک A 2015 ، 438 ، 140-153. [ Google Scholar ] [ CrossRef ]
- تراونمولر، ام. جانسون، ن. مالک، ع. Kontokosta، CE ردیابی دیجیتال: مدلسازی تحرک شهری با استفاده از دادههای کاوشگر WIFI. در مجموعه مقالات ششمین کارگاه بین المللی محاسبات شهری (ACM KDD 2017)، هالیفاکس، NS، کانادا، 14 اوت 2017؛ صفحات 1-9. [ Google Scholar ]
- رودریگز، DO; بوکرچه، ا. سیلوا، تی. لوریرو، AA; ویلاها، لس آنجلس ترکیب تاکسی و دادههای رسانههای اجتماعی برای بررسی مسائل مربوط به تحرک شهری. محاسبه کنید. اشتراک. 2018 ، 132 ، 111-125. [ Google Scholar ] [ CrossRef ]
- یانگ، ی. هپنستال، ا. ترنر، آ. Comber، A. چه کسی، کجا، چرا و چه زمانی؟ استفاده از کارت هوشمند و داده های رسانه های اجتماعی برای درک تحرک شهری. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 271. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیو، جی. هان، ک. چن، XM; Ong، GP استنتاج مکانی-زمانی انتشارات ترافیک شهری بر اساس مسیرهای تاکسی و داده های شهری چند منبعی. حمل و نقل. Res. سی امر. 2019 ، 106 ، 145-165. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اسپرلینگ، جی. جوان، SE; گاریکاپاتی، وی. دووال، آل. Beck, J. Mobility Data and Models Informing Citys Smart ; گزارش فنی؛ آزمایشگاه ملی انرژی های تجدیدپذیر (NREL): طلایی، CO، ایالات متحده آمریکا، 2019؛ صص 1-73. [ Google Scholar ]
- لوترو، ال. هردیا، RH; Álvarez، PJ پرده برداری از تفاوت های اجتماعی و اقتصادی در کلمبیا با استفاده از شبکه های پیچیده تحرک شهری. Memorias 2018 ، 1 ، 80-86. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ییلدیری اوغلو، م. Kim, J. شناسایی جوامع در شبکه های تحرک شهری با استفاده از نمودارهای چند لایه ترافیک شبکه. حمل و نقل. Res. سی امر. 2018 ، 89 ، 254-267. [ Google Scholar ] [ CrossRef ]
- آهنگ، HY; شما، دی. مدلسازی تحرک شهری با تجزیه و تحلیل یادگیری ماشینی داده های حمل و نقل تاکسی عمومی. بین المللی جی. پرواس. Comp. اشتراک. 2018 ، 14 ، 73-87. [ Google Scholar ] [ CrossRef ]
- ژانگ، اف. وو، ال. زو، دی. لیو، ی. سنجش اجتماعی از تصویرسازی سطح خیابان: مطالعه موردی در یادگیری الگوهای تحرک شهری فضایی-زمانی. ISPRS J. Photogramm. 2019 ، 153 ، 48-58. [ Google Scholar ] [ CrossRef ]
- مگی، ای. والینو، ای. درک تحرک شهری و تأثیر سیاستهای عمومی: نقش مدلهای مبتنی بر عامل. Res. ترانسپ اقتصاد 2016 ، 55 ، 50-59. [ Google Scholar ] [ CrossRef ]
- تانگ، جی. هاینیمن، اچ. خوجا، L. ارزیابی کمی چرخه های انعطاف پذیری متوالی در عملکرد بازار سهام: یک رویکرد سیستم محور. فیزیک A 2019 , 532 , 121794. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رگیانی، ع. Nijkamp، P. لانزی، دی. انعطاف پذیری و آسیب پذیری حمل و نقل: نقش اتصال. حمل و نقل. Res. A-Pol. 2015 ، 81 ، 4-15. [ Google Scholar ] [ CrossRef ]
- ژانگ، دبلیو. وانگ، N. کاهش خطر مبتنی بر انعطاف پذیری برای شبکه های جاده ای. ساختار. Saf. 2016 ، 62 ، 57-65. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Brabhaharan, P. پیشرفت های اخیر در بهبود انعطاف پذیری شبکه های جاده ای. در مجموعه مقالات کنفرانس مهندسی زلزله نیوزلند 2006، ولینگتون، نیوزلند، 1 آوریل 2006; صفحات 1-9. [ Google Scholar ]
- وانگ، دی. Ip، W. ارزیابی و تجزیه و تحلیل انعطاف پذیری شبکه لجستیک با کاربرد در خدمات هواپیما. سیستم IEEE J. 2009 ، 3 ، 166-173. [ Google Scholar ] [ CrossRef ]
- ژائو، ک. کومار، ا. هریسون، تی پی؛ ین، جی. تجزیه و تحلیل انعطاف پذیری توپولوژی های شبکه تامین پیچیده در برابر اختلالات تصادفی و هدفمند. سیستم IEEE J. 2011 ، 5 ، 28-39. [ Google Scholar ] [ CrossRef ]
- Murray-Tuite, P. ارزیابی استراتژیهای افزایش انعطافپذیری سیستم حملونقل در برابر ازدحام ناشی از حوادث . گزارش فنی؛ مرکز حمل و نقل دانشگاه مید آتلانتیک، موسسه پلی تکنیک ویرجینیا و دانشگاه ایالتی: بلکسبورگ، ویرجینیا، ایالات متحده آمریکا، 2008; صص 1-63. [ Google Scholar ]
- وانگ، ی. لیو، اچ. هان، ک. فریز، TL; یائو، تی. قیمتگذاری ازدحام روزانه و انعطافپذیری شبکه. ترانسپ A 2015 , 11 , 873-895. [ Google Scholar ] [ CrossRef ]
- لوپینگ، ی. Dalin، Q. تجزیه و تحلیل آسیب پذیری شبکه های جاده ای. J. Transp. سیستم مهندس Inf. فنی 2012 ، 12 ، 105-110. [ Google Scholar ]
- وان، سی. یانگ، ز. ژانگ، دی. یان، ایکس. فن، اس. انعطاف پذیری در سیستم های حمل و نقل: یک بررسی سیستماتیک و جهت گیری های آینده. ترانسپ Rev. 2018 , 38 , 479-498. [ Google Scholar ] [ CrossRef ]
- فاتورچی، ر. میلر هوکس، E. اندازه گیری عملکرد سیستم های زیرساخت حمل و نقل در بلایا: یک بررسی جامع. J. زیرساخت. سیستم 2014 ، 21 ، 04014025. [ Google Scholar ] [ CrossRef ]
- توکاموهابوا، BR; استیونسون، ام. بازبی، جی. Zorzini، M. تاب آوری زنجیره تامین: تعریف، بررسی و مبانی نظری برای مطالعه بیشتر. بین المللی J. Prod. Res. 2015 ، 53 ، 5592-5623. [ Google Scholar ] [ CrossRef ]
- ماتسسون، ال جی؛ جنلیوس، ای. آسیبپذیری و انعطافپذیری سیستمهای حمل و نقل – بحثی در مورد تحقیقات اخیر. حمل و نقل. Res. A-Pol. 2015 ، 81 ، 16-34. [ Google Scholar ] [ CrossRef ]
- گوس، ا. گروسکلاگز، جی. Chuang, J. ذخیره سازی داده محور انعطاف پذیر در شبکه های حسگر بی سیم ad-hoc. در کنفرانس بین المللی مدیریت داده های تلفن همراه ; Springer: برلین/هایدلبرگ، آلمان، 2003; صص 45-62. [ Google Scholar ]
- Erdene-Ochir، O. مینیر، م. والوا، اف. کونتوریس، الف. به سمت مسیریابی انعطاف پذیر در شبکه های حسگر بی سیم: مسیریابی مبتنی بر گرادیان در تمرکز. در مجموعه مقالات چهارمین کنفرانس بین المللی 2010 در زمینه فناوری ها و کاربردهای حسگر، ونیز، ایتالیا، 18 تا 25 ژوئیه 2010. صص 478-483. [ Google Scholar ]
- کاستیلو، ای. نوگل، م. ریواس، ا. سانچز-کامبرونرو، S. قابلیت مشاهده شبکه های ترافیکی. مکان بهینه دستگاه های شمارش و اسکن. ترانسپ B 2013 ، 1 ، 68-102. [ Google Scholar ] [ CrossRef ]
- کاستیلو، ای. گرانده، ز. کالوینو، آ. Szeto، WY; Lo, HK یک بررسی پیشرفته از موقعیت سنسور، مشاهده پذیری جریان، برآورد و مشکلات پیش بینی در شبکه های ترافیکی. J. Sens. 2015 ، 2015 ، 1-26. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خو، X. Lo, HK; چن، آ. Castillo، E. مکان حسگر شبکه قوی برای مشاهده کامل جریان پیوند در شرایط عدم قطعیت. حمل و نقل. Res. B Meth. 2016 ، 88 ، 1-20. [ Google Scholar ] [ CrossRef ]
- بیانکو، ال. اعتراف، جی. Reverberi، P. یک مدل مبتنی بر شبکه برای مکان سنسور ترافیک با مفاهیمی بر برآورد ماتریس O/D. حمل و نقل. علمی 2001 ، 35 ، 50-60. [ Google Scholar ] [ CrossRef ]
- ژو، ایکس. فهرست، GF یک مدل مکان سنسور نظری اطلاعاتی برای برنامه های کاربردی برآورد تقاضای مبدا-مقصد ترافیک. حمل و نقل. علمی 2010 ، 44 ، 254-273. [ Google Scholar ] [ CrossRef ]
- رینالدی، م. Viti, F. تولید مجموعه مسیر دقیق و تقریبی برای مشاهده پذیری جزئی انعطاف پذیر در مشکلات مکان سنسور. حمل و نقل. Res. B Meth. 2017 ، 105 ، 86-119. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مروان، ن. Donges, JF; زو، ی. Donner، RV; کورتس، جی. رویکرد شبکه پیچیده برای تحلیل عود سری های زمانی. فیزیک Lett. A 2009 , 373 , 4246-4254. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بن نعیم، ای. Frauenfelder، H.; Toroczkai, Z. Complex Networks ; Springer-Verlag: برلین/هایدلبرگ، آلمان، 2004; صص 35-37. [ Google Scholar ]
- نیومن، من؛ Barabási، ALE; Watts, DJ ساختار و دینامیک شبکه ها ; انتشارات دانشگاه پرینستون: پرینستون، نیوجرسی، ایالات متحده آمریکا، 2006; صص 1-8. [ Google Scholar ]
- گیزبرگر، آر. سندرز، پی. Schultes، D. تقریب بهتر از مرکزیت بینایی. در مجموعه مقالات دهمین کارگاه مهندسی الگوریتم و آزمایشات (ALENEX)، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 19 ژانویه 2008; ص 90-100. [ Google Scholar ]
- سان، ال. Axhausen، KW; لی، دی اچ. Huang, X. درک الگوهای شهری از برخوردهای روزانه. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2013 ، 110 ، 13774–13779. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شریفی، ع. یاماگاتا، Y. اصول و معیارهای ارزیابی تاب آوری انرژی شهری: بررسی ادبیات. تمدید کنید. سوست انرژی Rev. 2016 , 60 , 1654–1677. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لینکف، آی. آیزنبرگ، دی. پلورد، ک. سیگر، تی پی; آلن، جی. کوت، الف. معیارهای انعطاف پذیری برای سیستم های سایبری. Env. سیستم تصمیم می گیرد. 2013 ، 33 ، 471-476. [ Google Scholar ] [ CrossRef ]
- اویانگ، ام. Dueñas-Osorio، L. ارزیابی تاب آوری وابسته به زمان و بهبود سیستم های زیرساخت شهری. Chaos 2012 , 22 , 033122. [ Google Scholar ] [ CrossRef ][ Green Version ]
- چن، پی. Hero، AO ارزیابی و حفاظت از انعطاف پذیری شبکه در برابر حملات گره ای. IEEE Commun. Mag. 2014 ، 52 ، 138-143. [ Google Scholar ] [ CrossRef ]
- گانین، AA; ماسارو، ای. گاتفریند، ا. استین، ن. کیسلر، جی.ام. کوت، ا. منگوبی، ر. لینکف، I. انعطاف پذیری عملیاتی: مفاهیم، طراحی و تجزیه و تحلیل. علمی Rep. 2016 , 6 , 19540. [ Google Scholar ] [ CrossRef ] [ PubMed ] [ نسخه سبز ]
- بهاتیا، U. کومار، دی. کدرا، ای. Ganguly، کمی سازی تاب آوری مبتنی بر علم شبکه AR در شبکه راه آهن هند نشان داده شد. PLoS ONE 2015 ، 10 ، e0141890. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هو، اف. یونگ، CH; یانگ، اس. وانگ، دبلیو. Zeng، A. بازیابی شبکه های زیرساختی پس از حملات محلی. علمی Rep. 2016 , 6 , 24522. [ Google Scholar ] [ CrossRef ]
- ریاضیات. ادغام عددی ذوزنقه ای ; جعبه ابزار MathWorks Matlab: Natick، MA، ایالات متحده آمریکا، 2020؛ در دسترس آنلاین: https://www.mathworks.com/help/matlab/ref/trapz.html (در 16 آوریل 2020 قابل دسترسی است).
- داده های باز کمبریج شایر اینسایت. داده های ANPR کمبریج بزرگ ; شورای شهرستان کمبریج شایر: کمبریج، بریتانیا، 2020؛ در دسترس آنلاین: https://data.cambridgeshireinsight.org.uk (در 16 آوریل 2020 قابل دسترسی است).
- باورز، ک. بوشر، وی. دنتن، آر. ادواردز، ام. انگلستان، جی. انزر، م. مدرسه، ج. پارلیکاد، الف. زیرساخت هوشمند: کسب اطلاعات بیشتر از دارایی های استراتژیک . گزارش فنی؛ مرکز زیرساخت و ساخت و ساز هوشمند کمبریج: کمبریج، بریتانیا، 2017؛ صص 1-7. [ Google Scholar ]
- تمواکیس، پ. Xenidis، Y. ارزیابی مقایسه ای روش های کمی سازی انعطاف پذیری برای سیستم های زیرساخت. روند Soc. Behv. 2013 ، 74 ، 339-348. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فاکس-لنت، سی. لینکف، I. ماتریس تاب آوری برای برنامه ریزی جامع تاب آوری شهری. در برنامه ریزی شهری تاب آوری ; انتشارات بین المللی Springer: بازل، سوئیس، 2018; ص 29-47. [ Google Scholar ]
- Gutfraind، A. بهینه سازی انعطاف پذیری آبشار توپولوژیکی بر اساس ساختار شبکه های تروریستی. PLoS ONE 2010 ، 5 ، e13448. [ Google Scholar ] [ CrossRef ]


بدون دیدگاه