

خلاصه
حسگرهای غیرفعال، که در طیف مرئی (VIS) عمل میکنند، به طور گسترده برای مستندسازی، درک و حفاظت از میراث فرهنگی ملموس (CH) بین رشتهای استفاده شدهاند. اگرچه، بسیاری از زمینه های علوم میراث به طور قابل توجهی از اطلاعات اضافی که می تواند در طیف مادون قرمز نزدیک (NIR) به دست آید، سود می برند. تصاویر NIR، که برای کاربردهای میراث گرفته شده است، بیشتر با رویکردهای دو بعدی (2 بعدی) یا با ادغام دو بعدی به سه بعدی (3 بعدی) به دنبال تکنیک های پیچیده، از جمله سنسورهای تصویربرداری گران قیمت و تنظیمات، بررسی شده است. در دسترس بودن دوربین های دیجیتال اصلاح شده با وضوح بالا و پیاده سازی نرم افزارهای Structure-from-Motion (SfM) و الگوریتم های Multiple-View-Stereo (MVS)، تولید مدل هایی با بافت های طیفی را بیش از همیشه امکان پذیر کرده است. در این تحقیق، مروری کوتاه بر مدل سازی سه بعدی مبتنی بر تصویر با داده های NIR انجام شده است. هدف نویسندگان بررسی استفاده از تصاویر مادون قرمز نزدیک از حسگرهای اصلاح شده نسبتا کم هزینه برای دیجیتالی کردن میراث، در کنار سودمندی بافتهای طیفی تولید شده، جهتگیری به سمت علم میراث است. بنابراین، آزمایش و ارزیابی کامل با نرم افزارهای مختلف با استفاده از تصاویر NIR و روش های SfM/MVS انجام و ارائه شده است. ابرهای نقطهای سه بعدی متراکم و مشهای بافتدار تولید و برای اعتبار متریک و کیفیت رادیومتری آنها، در مقایسه با نتایج حاصل از تصاویر VIS، ارزیابی شدهاند. مجموعه داده های مورد استفاده از دارایی های میراث با ابعاد مختلف، از یک سایت باستان شناسی گرفته تا یک اثر هنری متوسط،
کلید واژه ها:
بررسی میراث فرهنگی ; فتوگرامتری برد نزدیک ؛ استریو چند نمایشی ؛ تصویربرداری طیفی ; مادون قرمز نزدیک ؛ دوربین اصلاح شده
1. معرفی
فتوگرامتری برد نزدیک (CRP) و عکاسی فنی (TP) دو تکنیک ضبط دیجیتال را تشکیل می دهند که به طور گسترده در چارچوب مستندسازی یکپارچه و مطالعه CH ملموس استفاده شده است. ظرفیت CRP برای دیجیتالی کردن ویژگیهای هندسی سهبعدی، ارائه نمایش دقیق سطوح مرئی، همراه با تطبیق پذیری آن، تحلیلهای بین رشتهای CH را امکانپذیر میسازد. این تکنیک میتواند اطلاعات بافتی ارزشمندی را برای بررسی ویژگیهای سطوح تاریخی فراهم کند [ 1 ]. همچنین میتواند دادههای لازم برای مستندسازی مکانهای باستانشناسی با نسبتها و هندسههای مختلف را تولید کند [ 2 , 3 , 4 , 5]، فعالیت های حفاری را پشتیبانی می کند [ 6 ، 7 ]، مداخلات حفاظتی را برنامه ریزی می کند [ 8 ، 9 ]، و به طور کلی، مدل ها و سیستم های مرجع را برای کمک به ادغام سه بعدی داده های تشخیصی چند سنسوری مختلف ایجاد می کند [ 10 ، 11 ]. علاوه بر این، آخرین تحولات الگوریتمی در حوزه بهره برداری متریک از تصاویر دیجیتال، اتوماسیون، سرعت پردازش، دقت و دقت را افزایش داده است [ 12 ، 13 ، 14 ]]. بنابراین، تسهیل اجرای نرم افزار برای تولید ساده ابرهای نقطه متراکم، مدل ها و سایر مشتقات متریک بازسازی دیجیتال. TP شامل طیف گسترده ای از تکنیک های قابل اجرا برای بررسی هنر تاریخی است [ 15 ]. به طور خاص، تصویربرداری مادون قرمز نزدیک (NIR) برای تقویت مشاهدات باستانشناسی [ 16 ]، برای تعیین وضعیت حفاظت از ساختمانها [ 17 ]، برای بازرسی نقاشیهای دیواری [ 18 ]، برای کمک به شناسایی رنگدانهها [ 19 ]، اجرا شده است. برای بررسی نقاشیهای زیرین تابلوهای تابلویی [ 20 ]، زیرچاپها [ 21 ] و پالمپسستها [ 22 ]، برای بررسی هنر صخرهای [ 23 ]]، و برای مطالعه ویژگی های ویژگی های مصنوعات نقاشی شده [ 24 ]. کاربردهای CRP و TP میراث یکپارچه را می توان در کتابشناسی اخیر یافت که ترکیبی امیدوارکننده را نشان می دهد که باید بیشتر مورد ارزیابی قرار گیرد.
رویکردهای گذشته در رابطه با ادغام مدلسازی میراث متریک و اطلاعات در طیف مادون قرمز نزدیک، در درجه اول بر جمعآوری دادههای جداگانه متمرکز شدهاند. برخی از روشهای مورد بررسی برای تولید مدلهای تقویتشده با بافت NIR از طریق ثبت دو بعدی (2D) به 3D عبارتند از (1) تبدیل ریاضی تصاویر طیفی با استفاده از نقاط متناظر [ 25 ]، (2) روشهای اطلاعات متقابل، مانند استفاده از نقشههای عمق [ 26 ] یا نقشههای شبح، نقشههای بازتابی، و سایر رندرهای مبتنی بر روشنایی [ 27 ]، و (3) ثبت بر اساس موقعیت سنسور شناخته شده، همانطور که میتوان با ردیابی نوری دوربینهای اجرا شده برای اکتساب طیفی انجام داد [ 27] 28]. با این حال، اجرای این رویکردها به دلیل استفاده از حسگرهای متعدد و زمان بر بودن به دلیل نیاز مکرر به توسعه الگوریتمهای خاص برنامه، اغلب گران است.
معرفی اخیر دوربینهای دیجیتال درجه مصرفکننده اصلاح شده برای کسب طیف کامل یا تک طول موج به علم میراث، جایگزینی ارزانتر و با وضوح بالاتر ارائه کرده است [ 29 ، 30 ]. این راه حل دارای قابلیت تصویربرداری طیفی است در حالی که ویژگی ها و رابط های کاربر پسند را برای طیف گسترده ای از لوازم جانبی عکاسی و نرم افزارهای پردازش تصویر حفظ می کند. در ترکیب با نرمافزار فتوگرامتری خودکار یا نیمه خودکار که الگوریتمهای ساختار از حرکت (SfM) و چند نمای استریو (MVS) را پیادهسازی میکند، که برای کاربردهای میراث بسیار محبوب شدهاند، میتواند مدلسازی میراث متریک را در نزدیکی انجام دهد. مادون قرمز [ 31 ، 32 ، 33].
مطالعه حاضر بر بررسی مختصر مدلسازی میراث ملموس چند مقیاسی از تصاویر NIR با اجرای الگوریتم SfM/MVS پیشرفته تمرکز دارد. پژوهش ارائه شده دارای هدف دوگانه، متریک و رادیومتری است. جنبه متریک تحقیق به ارزیابی نتایج هندسی اشاره دارد که با رویکرد ترکیبی CRP و TP قابل دستیابی است. ارزیابیهای متریک با مقایسه با رویکرد کلاسیک CRP (با استفاده از تصاویر دیجیتالی با طیف مرئی) و اسکن نتایج در هر زمان که در دسترس باشد، انجام میشود. جنبه رادیومتری به ارزیابی نتایج سه بعدی بافتدار NIR، در مورد ظرفیت آنها برای بهره برداری بیشتر به سمت مشاهدات باستان شناسی یا تشخیصی مربوط می شود.
بخش دوم مقاله، مطالعات موردی، تجهیزات و روشهای مختلف میراث فرهنگی مختلف آزمایشهای انجامشده را ارائه میکند. ما به ویژگی های سنسورهای درگیر و پارامترهای ضبط و پردازش توجه ویژه ای می کنیم. لازم به ذکر است که به منظور افزایش قابلیت مقایسه نتایج متریک، ما سعی کردیم اکثر پارامترهای تصویربرداری طیفی و بازسازی فتوگرامتری را به صورت ثابت حفظ کنیم. بخش سوم بر نتایج مدل سازی سه بعدی و دقت مبتنی بر تصویر تمرکز دارد. بخش چهارم به بررسی استفاده از نتایج به دست آمده در جهت افزایش احتمالی مشاهدات باستان شناسی و تشخیصی اختصاص دارد. بخش پایانی برخی از اظهارات پایانی و دیدگاه های آینده را مورد بحث قرار می دهد.
2. مواد و روشها
2.1. مطالعات موردی
اولین مطالعه موردی (مجموعه داده 1) ویرانه های سکونتگاه Vassilika، بخشی از سایت باستان شناسی کیمیسالا باستانی، واقع در حدود 70 کیلومتری جنوب غربی شهر رودس در یونان است. کیمیسالا یکی از مهمترین مکانهای باستانشناسی در رودس روستایی است، همانطور که ویرانههای قابل رویت گسترده پراکنده در مکانهای مختلف نشان میدهد که قدمت آن از دوره میسنی تا اواخر باستان است (نگاه کنید به شکل 1 a).
مطالعه موردی دوم (مجموعه داده 2، به شکل 1 ب) به بخشی از دیوارهای آجری حیاط داخلی مرکز حفاظت و مرمت “La Venaria Reale” (متعلق به Consorzio delle Residenze Reali Sabaude ) اشاره دارد. این بنیاد در سال 2005 به عنوان بخشی از کارهای بازسازی گسترده تر در کاخ Reggia di Venaria Reale در خارج از تورین در ایتالیا تاسیس شد. آنها در Scuderie and Maneggio سابق قرن 18 واقع شده اند که توسط Benedetto Alfieri طراحی شده است (ابعاد تقریبی، 5 × 2.5 متر).
سومین مورد مطالعه (مجموعه داده 3، به شکل 1 ج) جزئیاتی از یک صفحه نمایش تاشو کروماندل چهار صفحه ای چینی از Castello Cavour در Santena (تورین)، متعلق به Città di Torino-Fondazione Cavour و متعلق به قرن 18 است. ابعاد تقریبی کامل، 2.6 × 2.2 متر).
مطالعه موردی چهارم (مجموعه داده 4، به شکل 1 د) یک قسمت مبلمان چوبی است که با گل های Palazzo Chiablese (Sala dell’Alcova) در تورین رنگ آمیزی شده است، متعلق به وزارت خارجه Beni e le Attività Culturali بین اواخر 19 و اوایل قرن بیستم (ابعاد تقریبی، 2.4 × 0.8 متر).
2.2. مجموعه داده ها
مجموعه داده 1 از سایت باستان شناسی کیمیسالا باستانی در طول برنامه فشرده اراسموس HERICT 2013، یک مدرسه تابستانی بین المللی برای پشتیبانی مستندات از کاوش های باستان شناسی در سکونتگاه Vassilika در رودس [ 34 ] به دست آمد. این سکونتگاه در داخل محوطه باستانی وسیعتر قرار دارد و خرابههای یک شبکه شهری سازمانیافته است که مساحتی به مساحت تقریبی 200 × 250 متر مربع با حدود 10 متر اختلاف ارتفاع را پوشش میدهد. برای این مطالعه، ما فقط از داده های گرفته شده با سیستم هواپیمای بدون سرنشین بال ثابت Swinglet (UAS) توسط Sensefly استفاده کردیم. دو سنسور دوربین 12 مگاپیکسلی (MP) استفاده شد ( جدول 1 ). دوربین کامپکت Canon Ixus 220HS (اندازه سنسور 6.14 × 4.55 میلی متر مربع، اندازه پیکسل 1.55 میکرومتر) برای تصاویر VIS و دوربین کامپکت Canon PowerShot ELPH300HS (اندازه سنسور 6.14 × 4.55 میلی متر مربع ، اندازه پیکسل 1.55 میکرومتر) برای دریافت NIR. دومی با حذف فیلتر برش مادون قرمز و قرار دادن یک فیلتر داخلی فقط NIR اصلاح شد [ 35 ]. برنامه ریزی ماموریت با هر دو سنسور برای برنامه با استفاده از نرم افزار e-motion، برای چهار پرواز با ارتفاع تقریبی 90 متر، خودکار شده بود. نقاط کنترل زمینی با استفاده از سیستم ماهوارهای ناوبری جهانی (GNSS) و روش سینماتیک بلادرنگ (RTK) با دقت 2 تا 3 سانتیمتر اندازهگیری شدند. آنها با یک الگوی شطرنجی سیاه و سفید 20 × 20 سانتی متر مربع علامت گذاری شده بودند و به منظور پوشش دادن کل منطقه به مؤثرترین شکل ممکن توزیع شدند ( شکل 2).). ما تصمیم گرفتیم که داده های هر یک از چهار سناریو پرواز را به طور جداگانه پردازش کنیم.
مجموعه دادهها برای بقیه مطالعات موردی ( شکل 1 b-d) با یک دوربین 17.9 مگاپیکسلی Canon Rebel SL1 (DSLR) (اندازه سنسور 22.30 × 14.90 میلیمتر مربع ، اندازه پیکسل 4.38 میکرومتر) تبدیل شده است. توسط ‘Life Pixel Infrared’ برای بدست آوردن طیف کامل با حذف فیلتر برش IR. برای خریدهای VIS و NIR، از دو فیلتر خارجی متفاوت استفاده شد. برای مطالعات موردی داخلی، از فلاش و سه پایه استفاده کردیم.
برای به دست آوردن مجموعه داده های تصویری سفت و سخت، یک گردش کار استاندارد برای گرفتن عکس دنبال شد ( شکل 3) با همپوشانی های بزرگ برای بازسازی سه بعدی مبتنی بر تصویر. علاوه بر این، سعی شد برای هر مطالعه موردی، شرایط ثبت (فاصله کانونی، دیافراگم، نوردهی، موقعیتهای دوربین) و فواصل نمونه زمین (GSD) بین طیفهای VIS و NIR ثابت بماند. ارجاع برای مطالعه موردی دیوار آجری با مجموعهای از 18 نقطه کنترل و کنترل از پیش علامتگذاری شده، اندازهگیری شده با تئودولیت کل ایستگاه (TST) GeoMax Zoom30 3 انجام شد که نتایجی با دقت 4-5 میلیمتر در x- ایجاد کرد. محور، 2-3 میلی متر در محور y، و 5-6 میلی متر در محور z. برای پانل ها و مطالعات موردی مبلمان، پوسته پوسته شدن با یک نوار مقیاس اینوار 1.000165 متر (13± نانومتر) انجام شد. ویژگی های همه مجموعه داده ها در جدول 1 خلاصه شده است.
2.3. نرم افزار و سخت افزار پردازش
پردازش فتوگرامتری از طریق دو نرم افزار تجاری مبتنی بر SfM/MVS انجام شد. Agisoft Metashape Pro 1.5.1، که از یک الگوریتم تبدیل ویژگی تغییرناپذیر مقیاس (SIFT) برای شناسایی و توصیف ویژگیها، یک الگوریتم حریصانه برای یافتن مکانهای تقریبی دوربین، و یک الگوریتم تطبیق تنظیم بسته جهانی برای اصلاح آنها استفاده میکند. این یک شکل از محاسبه نابرابری MVS برای بازسازی متراکم و بازسازی سطح Screened Poisson برای مش بندی استفاده می کند. 3DFlow Zephyr Aerial 4.519 یک آشکارساز تغییر یافته گاوسی (DoG) و ترکیبی از جستجوی تقریبی نزدیکترین همسایه، اجماع نمونه M-Etimator، و معیار اطلاعات قوی هندسی را برای تطبیق پیادهسازی میکند، سپس، SfM. Bundle-Adjment سلسله مراتبی را انجام میدهد. بازسازی متراکم MVS با یکپارچه سازی دید سریع و محدودیت های نابرابری تنگ به دست می آید. ساخت شبکه نامنظم مثلثی با رویکرد الگوریتمی حفظ لبه برای تمایز از Agisoft Metashape Professional انتخاب شد. تمام پردازش ها با لپ تاپ SANTECH، با پردازنده 6 هسته ای Intel i7-8750H با فرکانس 2.2 گیگاهرتز (حداکثر 4.1 گیگاهرتز)، 32 گیگابایت رم و پردازنده گرافیکی NVIDIA GeForce RTX 2070 انجام شد.
برای ارزیابی موثر عملکرد نرمافزار پیادهسازیشده و اثرات مدلسازی مبتنی بر تصویر سهبعدی بر روی طیفهای مختلف، پارامترهای مشابه، در صورت امکان، برای گردشهای کاری بازسازی سهبعدی انتخاب شدند، همانطور که در جدول ۲ خلاصه شده است. پارامترها پس از آزمایش برای بهینه سازی نتایج نهایی با بافت سه بعدی انتخاب شدند. آنها به منظور به حداکثر رساندن جزئیات سطح حفظ شده انتخاب شدند، در حالی که نتایجی با چگالی بالا غیرضروری، به معنی نقاط تکراری تولید نکردند – با در نظر گرفتن هر GSD، بنابراین مراحل پردازش را کند میکنند.
مقایسه هندسی بین رئوس مدل های نهایی با اندازه گیری فواصل Hausdorff در نرم افزار Cloud Compare انجام شد. هیچ مدل محلی برای محاسبه این فواصل استفاده نشده است.
ما باید تأکید کنیم که برای پردازش مجموعه دادههای 1 و 4، تنها مناطق خاصی از ابرهای متراکم قبل از مرحله بازسازی مش سهبعدی انتخاب شدند تا نتایج مدلسازی مبتنی بر تصویر را در مناطق مورد علاقه بیشتر برای مشاهدات باستانشناسی/باستانسنجی بهتر به نمایش بگذارند. به طور خاص، برای سایت باستان شناسی کیمیسالا، مساحتی به مساحت تقریبی 230 × 180 متر مربع و برای قسمت مبلمان چوبی رنگ آمیزی شده با گل، مساحت 60 × 60 سانتی متر مربع انتخاب شد. در نتیجه، مراحل محاسباتی و نتایج مش بندی و بافت دهی تنها به آن مناطق مربوط می شود.
3. نتایج
برای مجموعه داده 1، بازسازی های کامل برای سناریوهای 1 و 2 تولید شد (به فایل تکمیلی PDF-S1 مراجعه کنید ). برای سایر سناریوهای پرواز، به دلیل برخی بینظمیهای موجود در شرایط پرواز و به دلیل همپوشانیهای کوچکتر، مناطق خاصی حداقل در دو تصویر به تصویر کشیده نشد و بنابراین بازسازی نشد ( شکل 4 ). سناریوهای ارتفاعات پروازی مشابه نتایج فتوگرامتری مشابهی را با Metashape Professional از نظر تراکم ابرها، حفظ جزئیات سطح روی شبکهها، کیفیت بافتها و زمانهای پردازش مورد نیاز تولید کردند ( جدول 3).). بازسازی با تصاویر NIR نیمی از خطاهای ریشه میانگین مربع (RMS) را در نقاط کنترل و بازرسی برای سناریوهای پرواز پایینتر اما همان سطوح خطاهای RMS را برای سناریوهای ارتفاع بالاتر تولید کرد ( جدول 4 ). شکل 5 نتایج بافت دهی به دست آمده را نشان می دهد.
با Zephyr Aerial، صحنه محوطه باستانی در هیچ یک از سناریوهای اکتساب به طور کامل بازسازی نشد و ابرهای نقطه پراکنده ( جدول 5 ) با ناپیوستگی های زیادی تولید کرد. در نتیجه، در این مورد خاص، تصمیم گرفته شد که به مرحله بازسازی مش ادامه داده نشود زیرا نتایج پراکنده در منطقه مورد نظر تولید می شود.
بازسازی 3 بعدی مبتنی بر تصویر برای مجموعه داده 2 نتایج مدلسازی بسیار متراکمی را از جزئیات سطح با وفاداری بالا ایجاد کرد (به فایل تکمیلی PDF-S2 مراجعه کنید ). به طور کلی، Metashape Pro نتایج متراکمتری را با زمان پردازش کمتر مورد نیاز تولید کرد ( جدول 6 )، اما با بررسی دقیق، مشخص شد که هر چهار ترکیب پردازشی حفظ جزئیات سه بعدی مشابهی را ارائه میکنند، با وجود اینکه مدل Zephyr Aerial NIR تعداد سوراخهای کمی داشت. قسمت بالایی آن
Metashape Pro همچنین منجر به خطاهای بازپرداخت کوچکتر و خطاهای RMS نقاط اندازه گیری شده برای هر دو تصویر VIS و NIR شد. علاوه بر این، دو نرم افزار مختلف منجر به یک سطح خطا بین پردازش تصویر VIS و NIR شدند. Metashape Pro خطاهای RMS کنترل و بررسی را در حدود 1-1.5 میلی متر و Zephyr Aerial تقریباً 2.5-3 میلی متر تولید کرد.
برای مجموعه داده 2، مقایسه هندسی بین مدل VIS و NIR از Metashape Pro تفاوت 0.9 میلی متر میانگین و 0.4 میلی متر RMS و برای Zephyr Aerial، از میانگین 1.2 میلی متر و 0.2 میلی متر RMS را نشان داد. تفاوت بین دو مدل NIR زیر 2 GSD بود. علاوه بر این، تفاوتهای اندازهگیریشده بین تصاویر VIS و NIR دارای میانگین 2.6 میلیمتر و فاصله RMS 1.1 میلیمتری برای Metashape Pro بود، همان مقدار تغییراتی که بین مدل VIS و مش تولید شده توسط یک ابر نقطه اسکنر Leica BLK 360 اندازهگیری شد. همچنین، فاصلههای مشابه 2.5 میلیمتر و 1.0 میلیمتر RMS برای Zephyr Aerial، در مقایسه با همان ابر نقطه سهبعدی اسکن لیزری پس از انجام نمونهبرداری پایین، وجود داشت. شکل 6 نتایج بافت NIR به دست آمده با هر دو نرم افزار را نشان می دهد.
از مجموعه داده 3، Zephyr Aerial قادر به بازسازی صحنه نبود، نه برای VIS و نه برای سناریوی NIR. مش های بافتی تولید شده با Metashape Professional از دو طیف مختلف از چگالی و کیفیت مشابهی برخوردار بودند ( جدول 7 ). اگرچه، مش VIS حاوی مقدار کمی نویز در مقایسه با NIR بود ( شکل 7 )، که عمدتاً از طریق محاسبه تفاوتهای هندسی بین آنها قابل شناسایی است، زیرا سطح جزئیات یکسان در هر دو حفظ شده بود ( شکل 8 ). فاصله Hausdorff محاسبه شده بین دو مدل 0.4 میلی متر میانگین و 0.3 میلی متر RMS، برای منطقه بازرسی تقریبا 45 × 75 سانتی متر مربع بود .
بازسازی مبتنی بر تصویر برای مجموعه داده 4 نتایج با چگالی بسیار بالایی را با Metashape Pro در مقایسه با Zephyr Aerial ایجاد کرد و به طور کلی با تصاویر غیر VIS بهتر عمل کرد، زیرا Zephyr Aerial در زمانهای پردازش طولانیتر نتایج کمتر، نویزتر و کمتر کاملتر را تولید کرد. ( جدول 8 ). برای اهداف تجسم بهتر، بخشی از نتایج مش و بافت در شکل 9 نشان داده شده است. تفاوت هندسی محاسبهشده بین مدلهای سهبعدی VIS و NIR 0.5 میلیمتر میانگین و 0.7 میلیمتر RMS برای Metashape Professional، و میانگین 1.0 میلیمتر و 1.0 RMS برای Zephyr Aerial بود، در حالی که فاصله Hausdorff بین دو بازسازی VIS با رویکردهای الگوریتمی متفاوت میلیمتر و 0 بود. 0.8 میلی متر RMS، و بین بازسازی های NIR، میانگین 1.0 و 1.1 RMS برای فاصله نمونه برداری 0.1 میلی متر از تصاویر اصلی. مجدداً، مش VIS حاوی مقدار کمی نویز در مقایسه با NIR است که از طریق محاسبه تفاوتهای هندسی بین آنها قابل شناسایی است، زیرا همان سطح از جزئیات در هر دو حفظ شده است. فاصله بین تمام مدلهای سه بعدی و مش تولید شده از اسکنر نور ساختاری Stonex F6 در محدوده 1.0 ± 1.0 میلی متر بود.
4. بحث
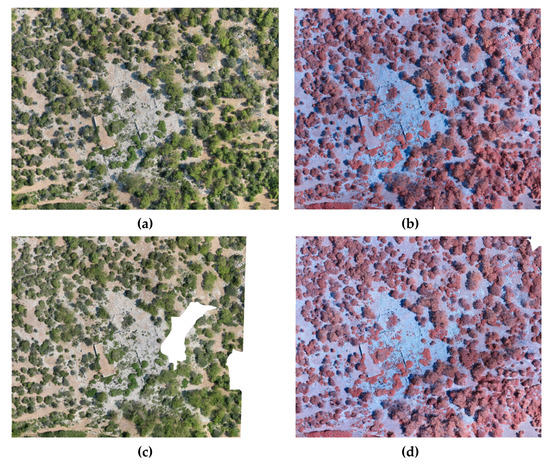
مدلسازی مادون قرمز نزدیک از سایت باستانشناسی Kymissala منجر به بهبود جزئی مشاهدات باستانشناسی شد، بدون اینکه بینش قابلتوجهی در مقایسه با اسناد سه بعدی قابل مشاهده ارائه کند ( شکل 10 ). اگرچه، با استفاده از نتایج بازسازی NIR متراکم، ما توانستیم تقریبی دقیقی از مدل زمین دیجیتال بسازیم. لازم به ذکر است که مدل های دیجیتال زمین با حذف سایبان تنها با فیلتر رنگی ساخته شده اند. برای ابرهای نقطه متراکم VIS و NIR، از مقادیر رنگ در مختصات یکسان، مربوط به پوشش گیاهی بالاتر، پایین تر و سایه دار استفاده کردیم تا پوشش گیاهی را طبقه بندی و سپس پاک کنیم (با حفظ مقادیر تحمل ثابت). همانطور که در شکل 11 نشان داده شده است، مدل زمین تولید شده توسط تصاویر NIR تقریباً بی صدا است و شناسایی بقایای باستان شناسی را تسهیل می کند. بنابراین، میتوانیم ادعا کنیم که برای این مطالعه موردی، مدلسازی NIR جداسازی سایبان را برای ایجاد یک مدل زمین دقیقتر آسانتر کرد (به فایلهای تکمیلی TIF-S3 و TIF-S4 مراجعه کنید).
برای مطالعه موردی دیوارهای آجری، مدلسازی مادون قرمز نزدیک امکان شناسایی تقریبی مناطق زوال زیستی روی سطوح را فراهم کرد، زیرا این مناطق پوسیده پاسخ متفاوتی نسبت به مواد سالم در طیف NIR دارند. در نواحی پایینتر مدل NIR ( شکل 12 )، پوسیدگی به راحتی قابل شناسایی است و میتوان آنها را از نواحی با رطوبت بالا، که در مدل VIS تاریک نیز به نظر میرسند، تشخیص داد. نتایج با بازرسی های درجا تأیید شد.
برای مطالعه موردی جزئیات از صفحه نمایش کروماندل چهار صفحه ای چینی، مدل سازی NIR به شناسایی نواحی روتوش شده و معیوب کمک کرد ( شکل 13 )، که تیره تر از سطح پس زمینه لاک بدون رنگ به نظر می رسند. علاوه بر این، مدلسازی NIR به تولید یک مدل سه بعدی سطحی بدون نویز، همانطور که در بالا توضیح داده شد، کمک کرد.
مدل سازی نزدیک به مادون قرمز قسمت مبلمان چوبی رنگ شده با گل به شناسایی بهتر عیوب و مناطق بازسازی شده کمک کرد ( شکل 14 ). در مدل NIR، ما توانستیم ویژگیهای زیرسطحی مانند ترمیمهای قبلی را مشاهده کنیم که با پر کردن با مواد جدید و با رنگآمیزی مجدد، ترکها و نواحی کوچک تخریب شده انجام میشد. در غیر این صورت نمی توان آن ویژگی ها را تنها با بازرسی بصری و مدل سازی VIS شناسایی کرد.
5. نتیجه گیری ها
این مقاله نشان میدهد که چگونه میتوان از تصاویر مادون قرمز نزدیک از دوربینهای DSLR مصرفکننده اصلاحشده برای بهبود هندسه و بافت مدلهای میراث سه بعدی در مقیاسهای مختلف، با استفاده از نرمافزار مدلسازی مبتنی بر تصویر استفاده کرد. با در نظر گرفتن GSD و دقت هر روش، مدلسازی با مجموعه دادههای NIR نتایج بسیار دقیقی را در مقایسه با مجموعههای داده VIS تولید کرد. علاوه بر این، برای مطالعات موردی در مقیاس بسیار بزرگ، مدلسازی مستقیم از تصاویر NIR متراکم منجر به مدلهای بدون نویز با وضوح بالا شد، که مشکلات خیرهکننده در تصاویر مرئی ناشی از شرایط نور و مواد بسیار بازتابنده را جبران میکند. برای تمام بازسازی های CRP، چه در طیف مرئی و چه در طیف مادون قرمز نزدیک، Agisoft Metashape بهتر از 3DFlow Zephyr عمل کرد. بازسازیهای تولید شده توسط 3DFlow Zephyr به طور کلی پراکندهتر بودند. پر سر و صداتر بود و ناپیوستگی داشت. اگرچه، پیادهسازیهای الگوریتمی مورد استفاده عمداً بسیار متفاوت بودند و برخی از آنها برای هر مطالعه موردی مناسب نبودند. علاوه بر این، باید اشاره کنیم که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. و ناپیوستگی هایی داشت. اگرچه، پیادهسازیهای الگوریتمی مورد استفاده عمداً بسیار متفاوت بودند و برخی از آنها برای هر مطالعه موردی مناسب نبودند. علاوه بر این، باید اشاره کنیم که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. و ناپیوستگی هایی داشت. اگرچه، پیادهسازیهای الگوریتمی مورد استفاده عمداً بسیار متفاوت بودند و برخی از آنها برای هر مطالعه موردی مناسب نبودند. علاوه بر این، باید اشاره کنیم که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. اگرچه، پیادهسازیهای الگوریتمی مورد استفاده عمداً بسیار متفاوت بودند و برخی از آنها برای هر مطالعه موردی مناسب نبودند. علاوه بر این، باید اشاره کنیم که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. اگرچه، پیادهسازیهای الگوریتمی مورد استفاده عمداً بسیار متفاوت بودند و برخی از آنها برای هر مطالعه موردی مناسب نبودند. علاوه بر این، باید اشاره کنیم که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. پیاده سازی های الگوریتمی مورد استفاده عمداً بسیار متفاوت بودند و برخی از آنها برای هر مطالعه موردی مناسب نبودند. علاوه بر این، باید اشاره کنیم که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. پیاده سازی های الگوریتمی مورد استفاده عمداً بسیار متفاوت بودند و برخی از آنها برای هر مطالعه موردی مناسب نبودند. علاوه بر این، باید اشاره کنیم که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. لازم به ذکر است که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. لازم به ذکر است که Agisoft Metashape دارای قابلیت های عالی در فیلتر کردن نویز بود. همچنین، در موارد کاربردهای در مقیاس بسیار بزرگ، نیازمندی های میلی متری یا زیر میلی متری، 3DFlow Zephyr می تواند عملکرد بهتری داشته باشد، با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، نتیجه مشبک سازی نزدیک تر به نتایج بازسازی خام ایجاد کند. . برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، یک نتیجه مشبک سازی نزدیک به نتایج بازسازی خام ایجاد می کند. برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد. با الگوریتم حفظ لبه، که هیچ داده ای را درون یابی نمی کند، یک نتیجه مشبک سازی نزدیک به نتایج بازسازی خام ایجاد می کند. برعکس، 3DFlow Zephyr برای مناطق با ابعاد بزرگ توصیه نمی شود، زیرا معمولاً خراب می شود. علاوه بر این، به نظر نمی رسد استفاده از تصاویر NIR تأثیر قابل توجهی بر مدت زمان پردازش یا خطاهای بازسازی در هیچ یک از نرم افزارهای تجاری استفاده شده داشته باشد.
بافتهای مادون قرمز نزدیک با وضوح بالا بازسازیشده به افزایش مشاهدات باستانشناسی و ارزیابی وضعیت حفاظت، بسته به مطالعه موردی میراث کمک کردند. برای مطالعه موردی سایت باستانشناسی، مدلسازی NIR طبقهبندی سایبان را برای ایجاد یک مدل تقریبی زمین دیجیتال تسهیل کرد. برای بقیه مطالعات موردی، اطلاعات با ارزش حفاظت گرا در رابطه با ویژگی های سطحی و زیرسطحی مواد تاریخی ارائه کرد. لازم به ذکر است که بر خلاف سایر تکنیک های تصویربرداری طیفی، زمانی که اطلاعات دقیقی در مورد ویژگی های مواد و محصولات پوسیده در معماری یا مصنوعات تاریخی مورد نیاز است، این رویکرد نمی تواند جایگزین خصوصیات آزمایشگاهی شود. با اينكه،
برای نتیجهگیری، رویکرد مدلسازی سهبعدی نشاندادهشده در اینجا ثابت کرد که یک جایگزین ساده و انعطافپذیر برای روشهای قبلاً اجرا شده برای بهبود NIR مدلهای میراث است. این رویکرد به طور بالقوه می تواند برای تشخیص سریع و حفاظت از میراث ملموس چند مقیاسی، از مصنوعات کوچک گرفته تا معماری تاریخی، سودمند باشد. بنابراین، تحقیقات آینده ما بر اجرای مدلسازی سهبعدی مادون قرمز نزدیک و حرارتی برای شناسایی، نقشهبرداری و کمیسازی مواد و زوال آنها در داراییهای میراث متمرکز خواهد بود.
مواد تکمیلی
موارد زیر در https://www.mdpi.com/2220-9964/9/4/269/s1 موجود است. PDF-S1: فایل پی دی اف 3 بعدی مدل بافت دار مادون قرمز نزدیک از سایت باستان شناسی Ancient Kymissala، تولید شده با Agisoft Metashape Professional، به 1,000,000 مثلث کاهش یافته و با یک فایل تک فایل بافتی با ابعاد 4096 × 4096 پیکسل 2 بافت. PDF-S2: فایل پی دی اف 3 بعدی مدل بافت نزدیک مادون قرمز از دیوار آجری حیاط داخلی مرکز حفاظت و مرمت La Venaria Reale، تولید شده با Agisoft Metashape Professional، به 1,000,000 مثلث کاهش یافته و با یک فایل تک فایل 4096 بافت شده است. × 4096 پیکسل 2بافت TIF-S3: فایل TIF مدل دیجیتال زمین از سایت باستان شناسی Ancient Kymissala، تولید شده با Agisoft Metashape Professional از تصاویر قابل مشاهده پهپاد، با GSD 5.5 سانتی متر. TIF-S4: فایل TIF مدل دیجیتال زمین از سایت باستان شناسی Ancient Kymissala، تولید شده با Agisoft Metashape Professional از تصاویر پهپاد مادون قرمز نزدیک، با GSD 5.5 سانتی متر.
منابع
- دوستال، سی. Yamafune, K. نگاشت بافت فتوگرامتری: روشی برای افزایش وفاداری مدل های سه بعدی مواد میراث فرهنگی. J. Archeol. علمی Rep. 2018 , 18 , 430-436. [ Google Scholar ] [ CrossRef ]
- سوئیل، اس. تسیلیمانتو، ای. کرامیداس، وی. کاروگلو، م. بورکسیس، اف. آداموپولوس، ای. دلگو، تی. لامپروپولوس، ک. یوآنیدیس، سی. موروپولو، ا. و همکاران اسناد چند رشته ای با استفاده از تکنیک های آزمایش غیر مخرب برای مطالعه تشخیصی یک معبد باستانی. در ارزیابی و پایش غیرمخرب فنآوریهای مستندسازی، تشخیص و حفاظت از میراث فرهنگی ؛ Osman, A., Moropoulou, A., Eds. انتشارات بین المللی Springer: چم، سوئیس، 2019; صص 17-36. [ Google Scholar ]
- آیلو، دی. بوشمی، اف. داگوستینو، جی. گالیزیا، م. میلیتللو، پی. سانتاگاتی، سی. تکنیک های کم هزینه برای بررسی دیجیتالی یک معماری مینوی در سایت باستان شناسی Phaistos (کرت). بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2019 ، XLII-2/W17 ، 31–38. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مناجیت پراسرت، س. تریپاتی، NK; Arunplod، S. مدلسازی سه بعدی (3 بعدی) سایت میراث فرهنگی با استفاده از تصاویر پهپاد: مطالعه موردی بتکده ها در Wat Maha That، تایلند. Appl. علمی 2019 ، 9 ، 3640. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چیابراندو، اف. D’Andria، F. سامارتانو، جی. اسپانو، A. فتوگرامتری پهپاد برای بررسی سایت باستان شناسی. مدل های سه بعدی در هیراپولیس در فریجیا (ترکیه). باستانی مجازی Rev. 2018 , 9 , 28. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- روسی، سی. آشیل، سی. فاسی، ف. لری، ف. ریچیچی، ف. Fiorillo, F. گردش کار دیجیتال برای حمایت از کاوش های باستان شناسی: از بررسی سه بعدی تا اشتراک گذاری داده ها در وب. در مدل های نوآورانه برای توسعه پایدار در کشورهای نوظهور آفریقایی ؛ Aste, N., Della Torre, S., Talamo, C., Adhikari, RS, Rossi, C., Eds. انتشارات بین المللی Springer: Cham، سوئیس، 2020; صص 149-157. [ Google Scholar ]
- اسپانو، آ. چیابراندو، اف. سامارتانو، جی. Teppati Losè, L. رویکردهای تصویربرداری یکپارچه حمایت از فعالیت های حفاری. اسناد جغرافیایی چند مقیاسی در هیراپولی (TK). بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2018 ، XLII–2 ، 1075–1082. [ Google Scholar ]
- میرابلا روبرتی، جی. Nannei، VM; آزولا، پی. Cardaci، A. حفظ قلعه ونیزی برگامو: بررسی فتوگرامتری سریع برای برنامه ریزی حفاظت. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2019 ، XLII-2/W11 ، 873–879. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آداموپولوس، ای. تسیلیمانتو، ای. کرامیداس، وی. آپوستولوپولو، م. کاروگلو، م. تاپیناکی، س. یوآنیدیس، سی. جورجوپولوس، آ. Moropoulou، A. مستندات چند سنسوری اطلاعات متریک و کیفی سازه های سنگی تاریخی. ISPRS Ann. فتوگرام Remote Sens. Spatial Inf. علمی 2017 ، IV-2/W2 ، 1-8. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آپولونیو، فی. باسیلیسی، وی. کالیری، م. دلپیان، م. گایانی، م. پونچیو، اف. ریزو، اف. روبینو، آر. اسکوپیگنو، آر. Sobra, G. یک سیستم اطلاعاتی سه بعدی برای مستندسازی یک مداخله مرمت پیچیده. J. Cult. میراث. 2018 ، 29 ، 89-99. [ Google Scholar ] [ CrossRef ]
- تسیلیمانتو، ای. دلگو، ای تی. نیکیتاکوس، IA؛ یوآنیدیس، سی. Moropoulou، A. GIS و BIM به عنوان محیط های دیجیتال یکپارچه برای مدل سازی و نظارت بر بناهای تاریخی. Appl. علمی 2020 ، 10 ، 1078. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- نیکولوف، آی. Madsen, C. محک زدن ساختار برد نزدیک از نرم افزار بازسازی سه بعدی Motion تحت شرایط مختلف عکسبرداری. در میراث دیجیتال. پیشرفت در میراث فرهنگی: مستندسازی، حفاظت و حفاظت ؛ یادداشت های سخنرانی در علوم کامپیوتر; Ioannides, M., Fink, E., Moropoulou, A., Hagedorn-Saupe, M., Fresa, A., Liestøl, G., Rajcic, V., Grussenmeyer, P., Eds. انتشارات بین المللی اسپرینگر: چم، سوئیس، 2016; جلد 10058، صص 15-26. [ Google Scholar ]
- آداموپولوس، ای. Rinaudo، F. مقایسه به روز شده در رویکردهای معاصر برای دیجیتالی کردن اشیاء میراث. در مجموعه مقالات پنجمین کنفرانس بین المللی IMEKO TC-4 در مترولوژی برای باستان شناسی و میراث فرهنگی، فلورانس، ایتالیا، 4 تا 6 دسامبر 2019؛ کاتلانی، ام.، داپونته، پی.، ویرایش. IMEKO: فلورانس، ایتالیا، 2019؛ صص 1-6. [ Google Scholar ]
- استاتوپولو، EK; ولپونر، م. Remondino، F. خطوط لوله بازسازی سه بعدی مبتنی بر تصویر منبع باز: بررسی، مقایسه و ارزیابی. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2019 ، XLII-2/W17 ، 331–338. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوسنتینو، آ. گیل، م. ریبیرو، ام. Di Mauro, R. عکاسی فنی برای نقاشی های دیواری: نقاشی های دیواری تازه کشف شده در Aci Sant’Antonio (سیسیل، ایتالیا). منفی پاتریم. 2014 ، 20 ، 23-33. [ Google Scholar ] [ CrossRef ]
- ورهوون، جی. اسمت، پی اف. پولمن، دی. Vermeulen، F. خصوصیات طیفی اصلاح NIR یک دوربین عکاسی دیجیتال برای تقویت مشاهدات باستان شناسی. IEEE Trans. Geosci. Remote Sens. 2009 , 47 , 3456–3468. [ Google Scholar ] [ CrossRef ]
- لرما، جی ال. کابرلس، ام. عکاشه، تی اس; حداد، NA مستندات میراث معماری هوازده با دادههای اسکن مادون قرمز، حرارتی و لیزری قابل مشاهده، نزدیک. بین المللی جی. هریت. رقم. عصر 2012 ، 1 ، 251-275. [ Google Scholar ] [ CrossRef ]
- کوسنتینو، آ. استاوت، اس. Scandurra، C. تکنیکهای تصویربرداری ابتکاری برای بررسی و مستندسازی نقاشیهای دیواری و گرافیتیهای تاریخی در دخمههای San Giovanni، Syracuse. بین المللی جی. کنسرو. علمی 2015 ، 6 ، 23-34. [ Google Scholar ]
- دیلینی، جی کی; زیبل، جی جی; توری، م. لیتلتون، آر. پالمر، ام. مورالس، KM; د لا ری، ER; هونیگزوالد، الف. طیفسنجی تصویربرداری مرئی و فروسرخ از نوازنده هارلکین پیکاسو: نقشهبرداری و شناسایی مواد هنرمند در محل. Appl. Spectrosc. 2010 ، 64 ، 584-594. [ Google Scholar ] [ CrossRef ]
- بندیدا، ا. اسفارا، اس. ایبارا-کاستاندو، سی. اخلاقی، م. Caumes، JP; پرادره، سی. Batsale، JC; Maldague, X. تصویربرداری زیرسطحی برای بازرسی تابلوهای نقاشی: مطالعه مقایسه ای طیف های فرابنفش، مرئی، مادون قرمز و تراهرتز. اپتوالکترون. Rev. 2015 , 23 , 88-99. [ Google Scholar ] [ CrossRef ]
- میگل، سی. بوتورا، اس. فریرا، تی. Conde، AF; باروکاس-دیاس، سی. Candeias، A. پرده برداری از چاپ های زیرین اواخر قرن پانزدهم-اوایل قرن شانزدهم، انکونابولوم فرانسوی را با بازتاب شناسی مادون قرمز روشن کرد. J. Cult. میراث. 2019 ، 40 ، 34–42. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ایستون، RL، جونیور؛ نوئل، دبلیو. تصویربرداری چندطیفی از پالیمپسست ارشمیدس. Gazette du Livre Médiéval 2004 ، 45 ، 39–49. [ Google Scholar ] [ CrossRef ]
- زین الدین، ک. مجید، ز. عارف، MFM; ادریس، ک.م. عباس، م. داروین، N. مدل سازی سه بعدی برای مستندات هنر راک با استفاده از دوربین چند طیفی سبک وزن. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2019 ، XLII-2/W9 ، 787–793. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ورهوون، جی. تصویربرداری از نامرئی با استفاده از دوربینهای عکاسی دیجیتالی اصلاحشده برای عکاسی باستانشناسی نزدیک به فروسرخ ساده و کمهزینه. J. Archaeol. علمی 2008 ، 35 ، 3087-3100. [ Google Scholar ] [ CrossRef ]
- کیدزیرسکی، م. والچیکوفسکی، پ. ووتکوفسکا، ام. Fryskowska، A. یکپارچه سازی ابرهای نقطه ای و تصاویر به دست آمده از حسگر دوربین NIR ارزان قیمت برای اهداف میراث فرهنگی. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2017 ، XLII-2/W5 ، 407–414. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پلاگوتی، آ. ماستیو، AD; اوچدو، اف. Remondino، F. نگاشت بافت چندطیفی خودکار مدل های سه بعدی. در مجموعه مقالات هفدهمین کنفرانس پردازش سیگنال اروپا (EUSIPCO-2009)، گلاسکو، اسکاتلند، 24-28 اوت 2009. IEEE: Piscataway, NJ, USA, 2009; ص 1215–1219. [ Google Scholar ]
- کورسینی، ام. دلپیان، م. پونچیو، اف. Scopigno، R. ثبت تصویر به هندسه: یک روش اطلاعاتی متقابل با بهرهبرداری از ویژگیهای هندسی مرتبط با روشنایی. محاسبه کنید. نمودار. انجمن 2009 ، 28 ، 1755-1764. [ Google Scholar ] [ CrossRef ]
- سایمون چین، سی. منصوری، ع. مرزانی، ف.اس. Boochs, F. ادغام داده های سه بعدی و چند طیفی برای برنامه های کاربردی میراث فرهنگی: بررسی و دیدگاه ها. تصویر Vis. محاسبه کنید. 2013 ، 31 ، 91-102. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بلاژک، جی. سوکوپ، ج. زیتووا، بی. فلوسر، جی. تیچی، تی. Hradilova, J. سیستم موبایل کم هزینه برای جمع آوری داده های میراث فرهنگی چندطیفی. در مجموعه مقالات کنگره بین المللی میراث دیجیتال (Digital Heritage)، مارسی، فرانسه، 28 اکتبر تا 1 نوامبر 2013. IEEE: Piscataway, NJ, USA, 2013; صص 73-79. [ Google Scholar ]
- وب، EK; رابسون، اس. مک دونالد، ال. گارساید، دی. مستندات میراث فرهنگی Evans، R. طیفی و سه بعدی با استفاده از دوربین اصلاح شده. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2018 ، XLII–2 ، 1183–1190. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ماتیس، آ. جدینون، آر. هالوت، P. بهرهبرداری از بافت چند طیفی سه بعدی برای شناسایی ویژگیهای بهتر برای میراث فرهنگی. ISPRS Ann. فتوگرام Remote Sens. Spatial Inf. علمی 2019 ، IV-2/W6 ، 91-97. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آداموپولوس، ای. رینادو، اف. Bovero، A. اولین ارزیابیها در مورد مدلسازی مبتنی بر تصویر مبتنی بر علم میراث با استفاده از دوربینهای کمهزینه اصلاحشده و موبایل. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2019 ، XLII-2/W17 ، 23–30. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پامارت، ا. گیون، او. فاراچی، س. گاتت، ای. ژنوویز، ام. Vallet, JM; De Luca, L. جمع آوری و پردازش داده های فتوگرامتری چندطیفی برای مطالعات نقاشی دیواری. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2017 ، XLII-2/W3 ، 559–566. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پاردو، کالیفرنیا؛ فرجس، م. جورجوپولوس، آ. میلچارک، ام. پارنتی، ر. شرام، تی. اسکارلاتوس، دی. استفناکیس، ای. تاپیناکی، س. توچی، جی. و همکاران تجارب به دست آمده از برنامه فشرده ERASMUS HERICT 2013. در مجموعه مقالات ششمین کنفرانس بین المللی آموزش، تحقیق و نوآوری، سویل، اسپانیا، 18-20 نوامبر 2013. IATED: والنسیا، اسپانیا، 2013; صص 4424-4431. [ Google Scholar ]
- نایلند، دبلیو. دی یونگ، آر. د یونگ، اس ام. Wulder، MA; باتر، CW; Coops، NC مانیتورینگ وضعیت کارخانه و فنولوژی با استفاده از دوربین های دیجیتال درجه مصرف کننده حساس به مادون قرمز. کشاورزی برای. هواشناسی 2014 ، 184 ، 98-106. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
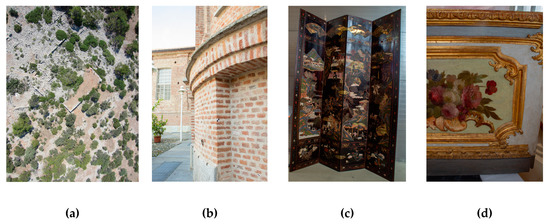
شکل 1. مطالعات موردی: ( الف ) بخشی از محوطه باستانی کیمیسالا در رودس، ( ب ) نماهای حیاط داخلی در مرکز حفاظت و مرمت وناریا، ( ج ) صفحه تاشو کروماندل از Castello Cavour در Santena، ( d ) مبلمان چوبی نقاشی شده با گل از Palazzo Chiablese در تورین.
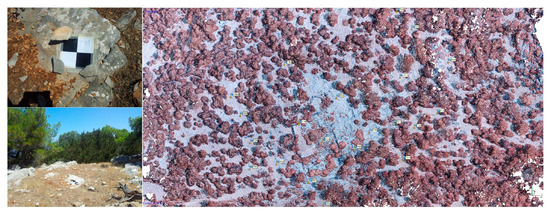
شکل 2. پیش سیگنالینگ و توزیع نقاط مکان ثابت برای ارجاع جغرافیایی و بررسی های متریک در سایت باستان شناسی کیمیسالا باستانی.
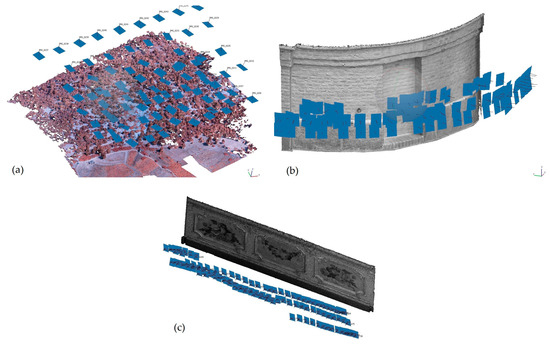
شکل 3. دریافت تصویر مادون قرمز نزدیک (NIR): ( الف ) مجموعه داده 1، ( ب ) مجموعه داده 2، و ( ج ) مجموعه داده 4.
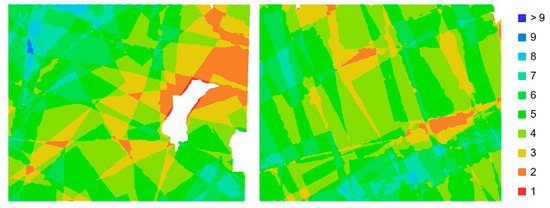
شکل 4. تعداد تصاویر همپوشانی در ناحیه مورد نظر برای سناریوهای 3 ( چپ ) و 4 ( راست ).
شکل 5. مدل های بافتی برای مجموعه داده 1، ( الف ) سناریو 1، ( ب ) سناریو 2، ( ج ) سناریو 3، ( د ) سناریو 4.
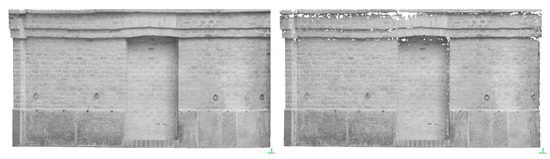
شکل 6. مدل های NIR برای مجموعه داده 2: Metashape Professional ( سمت چپ ) و Zephyr Aerial ( راست ).
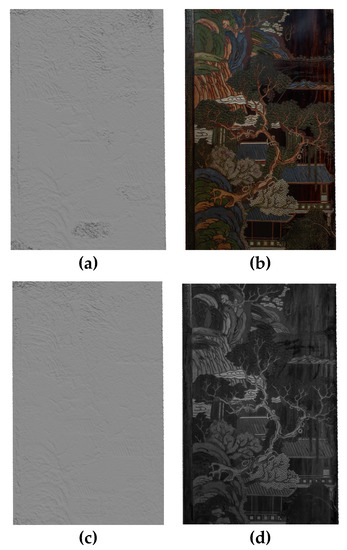
شکل 7. مش های مجموعه داده 3 تولید شده با Metashape Professional، ( الف ) مش VIS بدون بافت ، ( ب ) مش VIS بافت دار، ( ج ) مش NIR بدون بافت، ( د ) مش NIR بافت دار.
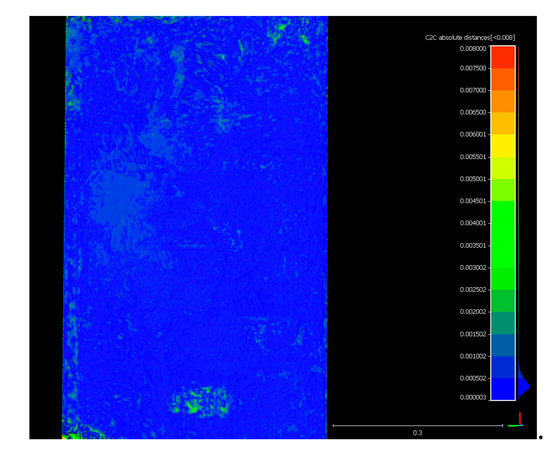
شکل 8. تغییرات بین مدلهای حرفهای متاشپ VIS و NIR برای مجموعه داده 3 (فاصلههای هاسدورف در مقیاسی تا 8 میلیمتر، با فواصل میدان اسکالر 0.5 میلیمتری نشان داده شده است).
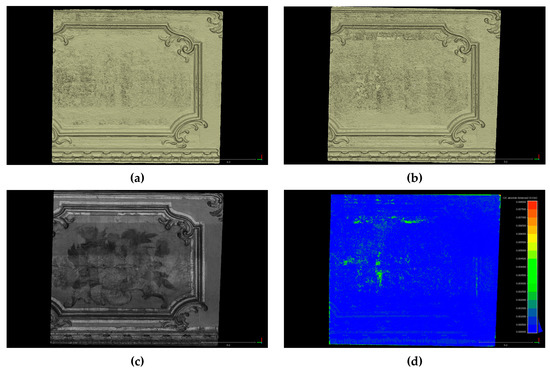
شکل 9. مش های مجموعه داده 3 تولید شده با Metashape Professional، ( الف ) مش VIS بدون بافت، ( ب ) مش NIR بدون بافت، ( ج ) مش NIR بافت دار رئوس، ( د ) فاصله بین مش های NIR و VIS.
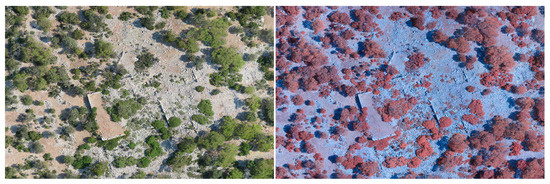
شکل 10. جزئیات ارتوموزاییک با وضوح بالا تولید شده برای مجموعه داده 1 از Metashape Professional: سناریو 1—VIS ( سمت چپ )، سناریو 2—NIR ( راست ).

شکل 11. مدل های زمین داده، ساخته شده پس از فیلتر کردن پوشش گیاهی، تولید شده برای مجموعه داده 1 از Metashape Professional: سناریو 1-VIS ( سمت چپ )، سناریو 2-NIR ( راست ).
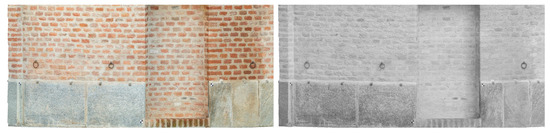
شکل 12. مقایسه جزئیات از مجموعه داده های VIS ( سمت چپ ) و NIR ( راست ) 2 مدل بافت دار برای ارزیابی شناسایی زوال زیستی در سطح نما.
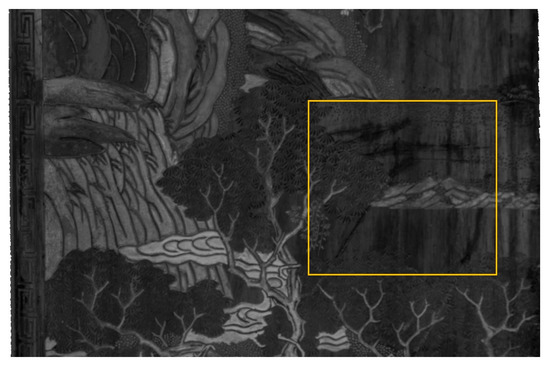
شکل 13. جزئیات از مدل بافت داده شده NIR مجموعه داده 3، که در آن روتوش و نقص در سطح رنگ شده قابل مشاهده است.

شکل 14. جزئیات از مجموعه داده 4 بافت VIS ( سمت چپ ) و NIR ( راست ) برای نشان دادن اینکه چگونه مناطق بازسازی شده و رنگ آمیزی شده را می توان با اکتساب فراتر از VIS مشاهده کرد.


بدون دیدگاه