1. مقدمه
به دلیل ماهیت بسیار فاسد شدنی، محصولات توت فرنگی مستعد عوامل زیادی هستند که بر کمیت و کیفیت در طول فصل تأثیر می گذارند [ 1 ]. چرخه های تولید توت فرنگی تحت تأثیر متغیرهای زیادی مانند آب و هوا، گرده افشانی، تاریخ کاشت، رقم، آفات و تأثیر بیماری است [ 2 ، 3 ، 4 ، 5 ]. شیوههای مدیریت محصول و انتخابهای لجستیکی نیز میتوانند بر عملکرد محصول و تنوع بازار تأثیر بگذارند. علاوه بر این، رقابت برای سهم بازار و برداشت نیروی کار بر سودآوری این کالای پیچیده و در حال نوسان تأثیر می گذارد [ 6 ]]. تنوع طبیعی بالا در تولید توت فرنگی، پیش بینی توزیع دقیق عملکرد و تصمیم گیری در مورد بازاریابی را برای تولیدکنندگان دشوار می کند. یک مدل عملکرد که بتواند عملکرد را از چند روز تا چند هفته قبل پیشبینی کند، ابزار قدرتمندی برای تولیدکنندگان خواهد بود که با برنامهریزی کارآمدتر برای هزینههای بازاریابی، توزیع نیروی کار و به حداقل رساندن رقابت درون بازار بین تولیدکنندگان منطقه، امکان حداکثر کردن سود را فراهم میکند.
مطالعات قبلی نشان داد که عملکرد توت فرنگی را می توان با استفاده از مشاهدات میدانی همراه با داده های آب و هوا تا حدی پیش بینی کرد. مکنزی و چندلر [ 2 ] از اطلاعات آب و هوا و داده های تعداد گل جمع آوری شده در دو فصل متوالی برای پیش بینی عملکرد توت فرنگی استفاده کردند. نتایج آنها نشان داد که تعداد میوه ها با دقت بیشتری نسبت به وزن میوه پیش بینی شده است. یک مطالعه متفاوت با موفقیت عملکرد هفتگی توت فرنگی را با استفاده از شبکه های عصبی مصنوعی و ورودی های خاک پیش بینی کرد [ 7 ]. تعداد تاج ها، وزن تر و وزن خشک توسط Bartczak، Lisiecka و Knaflewski [ 8 ] استفاده شد.]، که وزن تازه را مهمترین ورودی در مدل دانستند. پیش بینی عملکرد در سه تا چهار روز قبل از برداشت با استفاده از عملکرد قبلی و شمارش میوه در مراحل بلوغ فیزیولوژیکی خاص انجام شد [ 9 ]. با توجه به الگوی رسیدن فنولوژیکی توت ها در طول زمان در طول فصل رشد، احتمالاً عملکرد قبلی متغیر قابل توجهی است [ 10 ]. مفاهیم پارامترهای فیزیکی استخراج شده از هندسه تاج پوشش گیاهی که با عملکرد همبستگی دارند، ارزش استخراج معیارهای هندسه تاج پوشش چندگانه برای استفاده در مدلسازی عملکرد را برجسته میکند.
در حالی که اندازهگیریهای میدان مستقیم قابل اعتماد هستند و برای به دست آوردن نتایج دقیق مدل بازده مورد استفاده قرار گرفتهاند، اشکالات قابلتوجهی برای مدلهایی که کاملاً بر اساس اندازهگیریهای کار فشرده، زمانبر، پرهزینه و اغلب مخرب ساخته شدهاند، وجود دارد [ 11 ]. این روش ها اغلب نه عملی هستند و نه پایدار در هنگام هدف قرار دادن عملیات مزرعه در مقیاس بزرگ یا برنامه های کاربردی تحقیقاتی. فناوری سنجش از دور امکان جمعآوری سریع مقادیر زیادی از دادهها را فراهم میکند و اطلاعات تسهیلشده توسط این فناوری، پتانسیل عظیمی را برای استخراج سریع و غیر مخرب بسیاری از متغیرها فراهم میکند [ 12 ، 13 ]]. تصاویر سنجش از دور برای ساخت مدلهای پیشبینی عملکرد توت فرنگی که میتوانند عملاً برای عملیات مزرعه پیادهسازی شوند، مهم است. توسعه سریع فناوریهای تصویربرداری با توان بالا و الگوریتمهای تجزیه و تحلیل تصویر، استخراج اطلاعات خاص سایهبان را امکانپذیر کرده است.
پارامترهای بیوفیزیکی، مانند سطح برگ و وزن خشک زیست توده سایبان های توت فرنگی، با استفاده از تصاویر سنجش از دور مبتنی بر زمین [ 13 ، 14 ] مدل سازی شده اند.]. لیدار اغلب برای مدلسازی سایبان استفاده میشود، اما این فناوری هنوز برای جمعآوری دادههای گسترده در طول فصل رشد بسیار پرهزینه است. با توجه به نیاز نه تنها به مدلسازی سایبان، بلکه برای شناسایی مکانهای میوه و گل، در این مطالعه از یک سکوی متحرک با سنسورهای ناوبری و نقاط کنترل لازم برای ثبت تصاویر با رنگ واقعی و مادون قرمز برای ارائه متغیرهای سایهبان استفاده شد. این تصاویر دارای همپوشانی کافی هستند و می توان از آنها برای ایجاد موزاییک های اصلاح شده (اورتومویزیک) و مدل های سطح دیجیتال (DSM) برای استخراج ویژگی های سایبان استفاده کرد. با استفاده از حسگر ارتفاع پایین بر خلاف هواپیمای خلبانی یا سنسور ماهوارهای، میتوان ویژگیهای هندسی سایبانهای منفرد و همچنین تعداد گلها و میوهها را به دلیل وضوح فضایی بالای تصاویر استخراج کرد. مسائل دیگر،
در این مطالعه، هدف اصلی ما نشان دادن امکانسنجی توسعه مدلهای آماری پیشبینی عملکرد توت فرنگی با استفاده از متغیرهای مشتقشده از تصویر مانند متغیرهای اندازه تاج پوشش و تعداد گل و میوه، اطلاعات آب و هوا، و دادههای عملکرد قبلی بود. این مطالعه بر نقش تصاویر با وضوح مکانی و زمانی بالا در استخراج متغیرهای مدل تأکید دارد. برای دستیابی به هدف ما، عملکرد توت فرنگی، تعداد دستی میوه و گل، و تصاویر نزدیک جمع آوری و تجزیه و تحلیل شد. تعداد میوه ها و گل های مزرعه با تعداد تفسیر بصری از تصاویر مقایسه شد. مدلسازی آماری تعداد میدانها بهعنوان متغیرهای وابسته و شمارشهای مبتنی بر تصویر بهعنوان متغیرهای مستقل توسعه و اعتبارسنجی شدند. مدلهای آماری دیگری برای پیشبینی عملکرد توت فرنگی در فواصل زمانی مختلف قبل از برداشت توسعه داده شد. ما نتایج مدلسازی عملکرد توتفرنگی را در 3 تا 4 روز جلوتر، یک هفته جلوتر، و 3 هفته قبل از برداشت با استفاده از اعتبارسنجی مناسب بودن و خارج از نمونه مدلها مقایسه کردیم.
2. مواد و روشها
2.1. سایت مطالعه
آزمایشهای میدانی این مطالعه در مرکز تحقیقات و آموزش خلیجفارس دانشگاه فلوریدا (GCREC) در Balm، FL (عرض جغرافیایی: 27.76030 درجه شمالی؛ طول جغرافیایی: 82.22798 درجه غربی)، در طول فصل رشد توت فرنگی زمستانی 2017-2018 انجام شد. دو رقم توت فرنگی (‘Florida Radiance’ و ‘Florida Beauty’) در آزمایشات مورد استفاده قرار گرفت. هر رقم دارای 6 کرت با 24 بوته در هر کرت بود. کرت ها در قالب طرح بلوک های کاملا تصادفی مرتب شدند. شکل 1 موقعیت کلی محل مطالعه و طرح آزمایش را نشان می دهد. شیوه های مدیریت استاندارد تجاری دنبال شد.
2.2. ایجاد نقطه کنترل و جذب تصویر
فرآیند دریافت تصویر در طول فصل با ایجاد نقطه کنترل زمینی (GCP) انجام شد. نشانههای ثابتی که در تصاویر قابل مشاهده بودند، در اوایل فصل در میدان تنظیم میشدند و در طول فصل برای ارجاع جغرافیایی تصاویر بهدستآمده استفاده میشدند. سه گیرنده سیستم ماهواره ای ناوبری جهانی (GNSS) داده های ثابت را برای حداقل چهار ساعت در هشت نقطه کنترل واقع در سراسر سایت مطالعه جمع آوری کردند. برای بررسی نقاط کنترل اضافی در انتهای هر بستر و در امتداد پوششهای پلاستیکی تختهای توت فرنگی با استفاده از ابزار ایستگاه کل نقشهبرداری از دو نقطه بهعنوان نقاط پایه و پسبینی استفاده شد. نقاط انتهای هر تخت با استفاده از میله های آهنی در وسط اهداف پلاستیکی دایره ای رنگ آمیزی شده در زمین مستقر شدند. و نقاط ایجاد شده بر روی تختهای پلاستیکی روی قسمتهایی از تختها که توسط سایبانها پوشانده نشده بود، نقاشی شدند، مشابه روشی که Guan و همکارانش اتخاذ کردند. [14 ] شکل 2 نقاط کنترلی را نشان می دهد که در انتهای تخت های توت فرنگی و روی تخت های پلاستیکی ایجاد شده اند. مختصات GCP با استفاده از پردازش پس از GNSS در پیشبینی نقشه منطقه آمریکای شمالی (NAD83) و Universal Transverse Mercator (UTM) تعیین شد. این مجموعه ثابت از نقاط کنترل در طول فصل برای ایجاد موزاییکهای تصویری و DSM استفاده شد که نه تنها امکان استخراج دقیق ویژگیهای هندسی سایبانها را فراهم میکرد، بلکه امکان مقایسه مجموعه دادههای متوالی گرفتهشده در طول فصل را نیز فراهم میکرد.
تصاویر با استفاده از یک پلت فرم سفارشی ساخته شده توسط تراکتوری که از میان بسترهای توت فرنگی رانده شده است، به دست آمده است ( شکل 3)). دو دوربین دیجیتال نیکون D-300 درجه مصرف کننده استفاده شد. دوربین اول تصاویر قرمز-سبز-آبی (RGB) را می گرفت و دوربین دیگر دوربینی بود که با حذف فیلتر مادون قرمز نزدیک (NIR) برای ثبت تصاویر NIR اصلاح شده بود. دوربین ها در ارتفاع 3.5 متری از سطح زمین نصب شده بودند و با سرعت 0.5 متر در ثانیه حرکت می کردند تا حدود 70 درصد همپوشانی رو به جلو بین تصاویر ایجاد شود. فاکتورگیری در فاصله بین تخت های مجاور باعث ایجاد 60 درصد فاصله بین تصاویر به دست آمده می شود که برای ساخت مدل های سه بعدی مورد نیاز است. دوربینها بهطور خودکار توسط یک برنامه نرمافزاری و رابط سختافزاری توسعهیافته در داخل راهاندازی میشوند که محرکهای دوربین RGB و NIR را همگامسازی میکند و یک مهر زمانی GNSS برای هر نمونه راهانداز دوربین بهدست میآورد [ 15 ، 16 ]]. مسیر تصویربرداری در طول ماموریت گرفتن تصویر با استفاده از یک گیرنده GNSS درجه ژئودتیک که بر روی پلت فرم حمل دوربین ها نصب شده بود، جمع آوری شد. داده های مسیر GNSS با استفاده از تکنیک های تحلیل پس پردازش سینماتیک مورد تجزیه و تحلیل قرار گرفت. مهرهای زمانی راهانداز دوربین با مسیر GNSS مطابقت داده شد تا مکانهای ماشه دوربین ایجاد شود. تصاویر گرفته شده توسط دوربین های RGB و NIR دارای وضوح فضایی حدود 0.5 میلی متر به صورت خام بودند. بر اساس زمان روز برای جمعآوری تصاویر، که در تمام فصل یکسان بود، تصاویر تنها در حالی که تراکتور در جهت جنوب به شمال حرکت میکرد گرفته میشود تا سایههای روی سکوی پرت نشود و سایهها در سایهبان ثابت بماند.
دو تخت در شرق و غرب بستر آزمایش نیز برای تقویت هندسه اکتساب تصویر، ارائه تصاویر چند نمای و تسهیل استخراج داده های سه بعدی تصویربرداری شد. تخت ها دو بار در هفته در طول فصل توت فرنگی (اوایل نوامبر تا اواخر فوریه) تصویربرداری شدند. تقریباً 1300 تصویر (RGB و NIR) در هر یک از 31 جلسه اکتساب که در طول فصل انجام شد جمعآوری شد. این تصاویر به همراه اطلاعات مکان برای هر تصویر، برای تولید محصولات مختلف مانند ارتوموزائیک و ابرهای سه بعدی متراکم پردازش شدند.
2.3. پیش پردازش تصویر
هر دو تصویر RGB و NIR به دست آمده در هر جلسه مجموعه با استفاده از نرم افزار Agisoft Photoscan (نسخه 1.4) [ 17 ] برای تولید تصاویر ارتوموزائیک و همچنین DSM پردازش شدند. ترکیب تصاویر RGB و NIR در ساختار از تجزیه و تحلیل حرکت (SfM) چگالی ابر نقطه را افزایش داد و ایجاد ارتوموزائیک RGB-NIR مشترک فضایی را فعال کرد، همانطور که در نمای مثالی یک ابر نقطهای 3 بعدی و متراکم نشان داده شده است. شکل 4 . نرم افزار Agisoft، که از تجزیه و تحلیل SfM استفاده می کند، برای بازسازی هندسه اکتساب تصویر با استفاده از ویژگی هایی که در تصاویر همپوشانی همپوشانی دارند استفاده شد [ 18 ]]. نقاط کنترل زمینی بررسی شده در تصاویر گرفته شده شناسایی شدند و مختصات آنها به نرم افزار Agisoft وارد شد. این اطلاعات توسط نرم افزار Agisoft به صورت ریاضی پردازش شد تا موقعیت و جهت گیری دقیق تصویر در زمان شروع هر تصویر ایجاد شود. پردازش بیشتر این اطلاعات همراه با تطبیق گسترده ویژگیهای مربوطه در تصاویر همپوشانی، ابرهای نقطهای سه بعدی متراکم از محتوای تصویر را ایجاد کرد که برای ایجاد موزاییکهای اصلاحشده و DSM استفاده میشود.
یک DSM 2 میلی متری که نمایانگر تسکین اشیا (سایبان، گیاهان و خاک) [ 19 ] برای هر تاریخ دریافت تصویر ایجاد شد. به طور مشابه، یک موزاییک (ارتوموزائیک) اصلاح شده 1 میلی متری عاری از اعوجاج هندسی ناشی از تسکین توپوگرافی و شیب دوربین [ 20 ] برای هر یک از باندهای RGB و IR ایجاد شد. سپس از DSM و orthomosaics برای استخراج ماسک های گیاهی توت فرنگی و استخراج خواص ساختاری تاج پوشش، مانند مساحت و حجم تاج با استفاده از نرم افزار ESRI ArcMap (v 10.3) [ 21 ] استفاده شد.
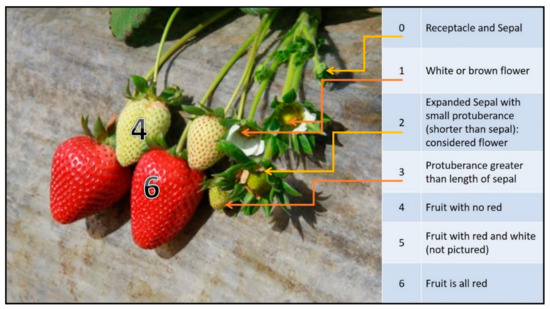
برای شناسایی و شمارش میوهها و گلهای توتفرنگی قابل مشاهده در تصاویر از تفسیر بصری استفاده شد. اگر چه هفت مرحله مختلف رشد میوه همانطور که در شکل 5 توضیح داده شده استفاده شد ، آنها فقط در دو دسته (گل ها و میوه ها) برای این مطالعه گروه بندی شدند ( شکل 5 ). میوهها و گلها در تصاویر تکی شناسایی شدند و با استفاده از نرمافزار ESRI ArcMap، محل آنها روی ارتوموزائیک مشخص شد. این مکانهای نقطهای برای محاسبه تعداد گل و میوه در سطح کرت جمعآوری شدند.
2.4. مجموعه داده های عملکرد توت فرنگی و تعداد گل و میوه
برداشت در کل کرت (24 بوته در هر کرت) انجام شد. فقط میوههای کاملاً رسیده برداشت و طبق استانداردهای درجهبندی وزارت کشاورزی ایالات متحده (USDA) [ 22 ] که عملکرد را از نظر وزنی تولید میکردند، درجهبندی شدند. همه دادهها طبق برنامه زمانی مشابه جمعآوری تصویر (دوشنبه و پنجشنبه هر هفته) جمعآوری شدند. گلها و میوهها بهصورت دستی در مزرعه شمارش شدند و بهعنوان گل (ردههای 0-2) و میوهها (ردههای 3-6) طبق دستهبندیهای نشاندادهشده در شکل 5 طبقهبندی شدند.. دادهها از شش گیاه در هر کرت جمعآوری شد که بهطور تصادفی انتخاب شدند و قبل از اولین شمارش، با تعداد زیادی میوهها در روزهای جمعآوری دادههای متعدد به دلیل توسعه فنولوژیکی از طریق دستهها شمارش شدند.
تصاویر ارثورکتیف شده زمین مرجع (ارتوموزائیک)، که با موزاییک کردن تصاویر همپوشانی منفرد گرفته شده توسط پلتفرم در میدان تولید میشوند، دارای وضوحی هستند که نیمی از وضوح اصلی تصاویر منفرد است. تصاویر ارتوموزائیک همچنین اغلب دارای مصنوعاتی هستند که از فرآیند موزاییکسازی به دست میآیند که هنگام زوم کردن بیشتر به سایبان قابل مشاهده هستند. این عوامل شناسایی گل و میوه را روی تصاویر تصحیح شده مشکل کرده و استفاده از تصاویر منفرد اصلی (قبل از موزاییک) را که سایبان را از جهات مختلف نشان می دهد (چند نمای) ضروری می کند. در این زمینه، اپراتور تجزیه و تحلیل تصویر به هر سایبان در تصویر اصلاح شده نگاه کرد و میوه یا گل را در حداقل 4 تصویر جداگانه شناسایی کرد.
2.5. متغیرهای آب و هوا
مطالعات قبلی گزارش داده اند که تعداد زیادی از متغیرهای آب و هوا بر میزان پیشرفت فیزیولوژیکی در تمام قسمت های گیاه توت فرنگی تأثیر می گذارد [ 4 ، 23 ، 24 ]. برای مثال، مککنزی و چندلر دریافتند که شروع جوانههای گل توتفرنگی تا حد زیادی تحتتاثیر طول روز و دما قرار دارد [ 2 ]، در حالی که چندلر و همکاران. [ 25 ] مشاهده کردند که زمان گلدهی تا باردهی 2.2 روز در پاسخ به کاهش 1 درجه سانتیگراد در دما طولانی می شود. کادیر و همکاران [ 26 ] همچنین تأثیر دمای تاج بر عملکرد میوه را مشاهده کردند. علاوه بر این، کرسپو و همکاران. [ 27] یک همبستگی نزدیک بین عملکرد و تابش فعال فتوسنتزی را گزارش کرد. این همبستگی ها در مراحل رشد اولیه و اواخر فصل برجسته هستند [ 4 ]. در مقابل، لی و همکاران. [ 28 ] تأثیرات منفی تابش خورشیدی و دمای هوا مرتبط با از دست دادن آب را بر پاسخ گیاهان توت فرنگی در هوای خنک و در نتیجه بر تشکیل میوه نشان داد. هر دو لی و همکاران [ 28 ] و پیرس و همکاران. [ 29]. تغییر عملکرد را در پاسخ به رطوبت خاک مشاهده کرد که دلالت بر اثر بارندگی دارد. روابط بین شرایط آب و هوایی و رشد، نمو و عملکرد توت فرنگی پیچیده است. برای به حداکثر رساندن قدرت پیش بینی مدل، تمام متغیرهای آب و هوای موجود جمع آوری شده از شبکه آب و هوای خودکار فلوریدا (FAWN) [ 30 ] برای اهداف پیش بینی آزمایش شدند. از این میان، سه متغیر دمای هوا از اندازهگیریهای روزانه کاوشگرهای 60 سانتیمتری، 2 متری و 10 متری از سطح زمین (ایستگاه Balm FAWN، FL) محاسبه شد. سایر متغیرها عبارتند از دمای خاک، رطوبت نسبی، بارندگی، فشار هوا، تابش خورشیدی، سرعت باد، جهت باد، دمای نقطه شبنم و تبخیر و تعرق ( جدول 1 ).
2.6. استخراج متغیرهای اندازه سایبان
در این بخش روش ها و فرضیات مورد استفاده برای استخراج خواص هندسی سایبان ها معرفی می شوند. این روش ها نیز در عبدالرحمان و همکاران مورد بررسی و بحث قرار گرفته اند. [ 31 ]. نرم افزار ArcMap ESRI نسخه 10.3 [ 21 ] برای تجزیه و تحلیل ارتوموزائیک RGB-IR و DSM حاصل از تجزیه و تحلیل SfM استفاده شد. نوارهای ارتوموزائیک RGB-IR بیشتر برای ایجاد شاخص گیاهی تفاوت نرمال شده (NDVI) [ 32 ]، نسبت سایه [ 33 ] و باندهای اشباع شدت رنگ [ 34 ] استفاده شد.] که برای ایجاد یک ماسک گیاهی باینری استفاده شد. این ماسک با علامت گذاری پیکسل هایی با مقادیر NDVI، اشباع و نسبت سایه بیشتر از صفر، 0.4 و صفر به عنوان پوشش گیاهی ایجاد شده است. تمام پیکسل های دیگر غیر گیاهی در نظر گرفته شدند (یعنی خاک، بستر پلاستیکی، رنگ و غیره). این آستانه ها با تغییر دستی آستانه ها و بازرسی بصری نتایج برای تعیین پذیرفته شده ترین خروجی آزمایش شدند. هنگامی که آستانه ها مشخص شدند، برای تمام جلسات اکتساب تصویر که در طول فصل به دست آمده بودند، ثابت نگه داشته شدند. فقط پیکسل هایی که به عنوان پوشش گیاهی مشخص شده اند برای استخراج متغیرهای اندازه تاج استفاده شد. شکل 6 ماسک گیاهی ارتوموزائیک و روکش شده ایجاد شده برای داده های گرفته شده در 8 ژانویه 2018 را نشان می دهد.
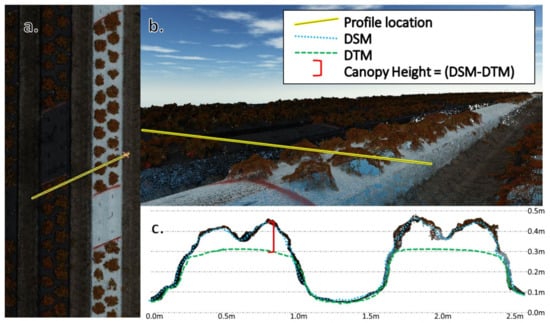
از آنجایی که تصاویر بر اساس GNSS GCPs در سطح سانتی متری ارجاع داده شدند، ترسیم دستی مرزهای گیاه و قطعه برای حذف مساحت خاک مورد استفاده قرار گرفت، که یک کار نسبتا ساده بود که نیازی به کار فشرده بین یک تاریخ خرید و تاریخ بعدی نداشت. DSM تولید شده توسط تجزیه و تحلیل SfM ارتفاع سطح اشیاء نشان داده شده در صحنه را در بالای یک داده ارتفاع خاص ارائه می کند (NAD83 در تحلیل ما). به منظور تولید ارتفاع تاج، یک لایه مدل زمین دیجیتال (DTM) که نمایانگر سطح زمین (سطح بستر پلاستیکی) زیر سایبان ها است، با استفاده از درون یابی فضایی ایجاد شد. ارتفاع پیکسل ها روی خاک و بستر (به استثنای پیکسل های تاج پوشش) برای درونیابی خاک و ارتفاع بستر در زیر سایبان ها استفاده شد. به عبارت دیگر، درون یابی برای پر کردن شکاف های DTM زیر سایبان ها به منظور تولید یک DTM پیوسته برای کل سطح بستر استفاده شد. این فرآیند با استفاده از پسوند تحلیلگر فضایی ArcMap v10.3 انجام شد. سپس مدل ارتفاع تاج به عنوان تفاوت بین DSM و DTM محاسبه شد.شکل 7 تجسم ابر نقطه سه بعدی و شماتیک محاسبه ارتفاع تاج پوشش را به عنوان تفاوت بین DSM و DTM برای یکی از نمودارهای ثبت شده در 11 ژانویه 2018 نشان می دهد.
سپس از ارتفاع سایبان بالای تخت برای هر پیکسل از سایبان ها برای استخراج متغیرهای اندازه سایبان مورد استفاده در این تحلیل استفاده شد. چندین متغیر اندازه تاج پوشش از لایه شطرنجی ارتفاع تاج برای هر یک از 12 قطعه ایجاد شده در این آزمایش محاسبه شد. این متغیرها در هر نمودار جمعآوری شدند و برای هر یک از 31 تاریخ دریافت تصویر محاسبه شدند. جدول 2 متغیرهای اندازه سایبان مورد استفاده در این مطالعه و تعاریف آنها را فهرست می کند. چندین مدل توسعه یافته با استفاده از سازنده مدل نرم افزار ArcMap v10.3 برای محاسبه و صدور خودکار متغیرهای اندازه سایه بان برای تمام 31 جلسه اکتساب داده استفاده شد.
2.7. روشهای تحلیل آماری
اگرچه بسیاری از متغیرهای پیشبینیکننده ممکن (به عنوان مثال، معیارهای آبوهوا و تصاویر) برای پیشبینی متغیرهای وابسته مورد علاقه در مطالعه در دسترس بودند، تنها تعداد کمی از آنها احتمالاً به بهبود دقت پیشبینی کمک میکنند. دو فرآیند برای انتخاب متغیرهای پیش بینی بهینه اجرا شد. ابتدا یک آزمون آماری برای بررسی اینکه آیا متغیرها تأثیر معنیداری بر تعداد یا عملکرد دارند یا خیر، انجام شد. در مدلهای پیشبینی، تنها آنهایی که تأثیرات معنیداری داشتند، بهعنوان متغیرهای پایه انتخاب شدند. دوم، انواع مدلهای پیشبینی ساختهشده بر روی این متغیرهای اساسی از نظر دقت پیشبینی برای تعیین مدل بهینه با متغیرهای پیشبین مربوطه مقایسه شدند. برای آزمایش متغیرها و توسعه مدلهای پیشبینی از مدلهای رگرسیون خطی استفاده شد. مدل ها به روش حداقل مربعات برآورد شدند.
مدلهای خطی ابتدا برای پیشبینی تعداد گلها و میوههای مشاهدهشده در مزرعه توسعه یافتند. مقایسه بین تعداد گلها و میوههای حاصل از تصویر و مشاهده شده در مزرعه نشان میدهد که میوهها و گلها از تصاویر با دقت بسیار زیادی در مرحله رشد اولیه فصل شناسایی شدند. با توجه به رشد تاج پوشش و افزایش تراکم در طول فصل، با این حال، میوهها و گلهای کمتری از تصاویر در مقایسه با شمارش مزرعههای تعیینشده با پیشرفت فصل قابل مشاهده بودند. بنابراین، شناسایی تعداد گل و میوه واقعی تحت تأثیر زمان (به عنوان مثال، روزهای پس از کاشت) و اندازه تاج پوشش قرار می گیرد. همانطور که انتظار می رفت، نتایج آزمون های آماری نشان داد که تأثیر این متغیرها معنی دار است. به خصوص، هر متغیر اندازه سایبان تأثیر قابل توجهی بر آزمایش یک به یک داشت زیرا همبستگی بالایی داشتند. بنابراین، زمان، شمارش های مشتق شده از تصویر و چهار متغیر اندازه تاج به عنوان متغیرهای پایه برای پیش بینی تعداد مشاهده شده استفاده شد. مدل پیش بینی کلی به صورت بیان شده است
که در آن o_count و i_count به ترتیب تعداد مشاهده شده و مشتق شده از تصویر هستند، زمان روزهای بعد از کاشت است و ارتفاع، std، مساحت و vol به ترتیب ارتفاع تاج، انحراف استاندارد ارتفاع تاج، سطح تاج و حجم تاج پوشش هستند. همانطور که قبلا توضیح داده شد.
پیشبینی چرخشی برای پیشبینی مداوم تعداد بازههای بعدی (در هر قطعه) در طول فصل اتخاذ شد. یعنی از داده های موجود در بازه i برای تخمین مدل برای تعداد مشاهده شده در بازه i استفاده شد. با استفاده از معادله تخمین زده شده و داده های موجود در بازه (i + 1) ام، تعداد پیش بینی فاصله ( i + 1) را محاسبه کرده و آنها را با تعداد مشاهده شده مقایسه کردیم. عملکرد پیشبینی با ریشه میانگین مربعات خطا (RMSE) اندازهگیری میشود. برای پیشبینی تعداد بازههای ( i + 2) ، مدل پیشبینی مجدد با دادههای موجود در ( i ) برآورد شد .+ 1) فاصله بین. روند رول تا آخرین شمارش فصل ادامه داشت. دقت پیشبینی مدل در طول فصل با مقدار کل RMSEs از اولین تا آخرین پیشبینی نشان داده شد. مدل کلی (1) شامل مجموعهای غنی از مدلها با استفاده از ترکیبهای مختلف متغیرهای پیشبینیکننده اصلی، بهعنوان مثال، استفاده از متغیرهای اندازه تاج کمتر یا استفاده از شرایط متقاطع یا مربعی متغیرهای پایه بود. هر مدل از نظر کل RMSE در طول فصل مورد بررسی قرار گرفت. مدل با کمترین RMSE به عنوان مدل پیش بینی بهینه شناسایی شد.
سپس، مدلهای خطی برای پیشبینی بازده خارج از نمونه (مسطح در هر هکتار، یک تخت برابر با 8 پوند) در فواصل زمانی مختلف (3 تا 4 روز قبل از برداشت، 1 هفته قبل از برداشت، و 3 هفته قبل از برداشت) توسعه یافتند. محصول). ما سه مدل پیشبینی بازده کلی را در نظر گرفتیم. اولین مورد از زمان و بازده قبلی به عنوان متغیرهای پیش بینی کننده اساسی استفاده کرد زیرا رشد میوه توت فرنگی با امواج رشد مشخص می شود [ 35 ] و در طول زمان روند کلی صعودی دارد. نتایج آزمون نشان داد که تنها دو بازده بازه قبلی تأثیر معنیداری بر عملکرد داشتند. بنابراین اولین مدل کلی زیر در نظر گرفته شد
مدل عمومی دوم فرض می کند که اطلاعات آب و هوا در دسترس است. دمای هوا، رطوبت نسبی، بارندگی، فشار هوا، تابش خورشیدی، سرعت باد، جهت باد و تبخیر و تعرق در فواصل زمانی در سطح معنیداری 5 درصد بر عملکرد تأثیر داشتند. با گنجاندن آنها در مدل، دومین مدل عمومی تولید شد
که در آن آب و هوا بردار متغیرهایی است که شامل تمام متغیرهای آب و هوایی است که تأثیرات قابل توجهی بر عملکرد دارند. دو مدل کلی اول به عنوان معیاری برای مقایسه با مدل سوم در نظر گرفته شد که شامل متغیرهای استخراج شده از تصاویر بود (مثلاً متغیرهای اندازه تاج پوشش و تعداد گل و میوه)
که در آن تصویر بردار متغیرهایی است که نه تنها تعداد گلها، تعداد میوهها و اندازه تاج پوشش در زمان t را شامل میشود ، بلکه مقادیر قبلی این متغیرها را نیز شامل میشود. برای هر مدل پیشبینی عملکرد، روش مورد استفاده برای پیشبینی تعداد گل یا میوه را تکرار کردیم. به این معنی که پیشبینی چرخشی برای پیشبینی بازده مرحله بعدی اتخاذ شد و میانگین RMSE از 12 قطعه در هر مرحله تا پیشبینی عملکرد نهایی فصل ایجاد شد. مدل پیشبینی بهینه با مقایسه کل RMSEs در طول فصل شناسایی شد. سهم معیارهای تصویری (تعداد به دست آمده از تصویر و اندازه سایهبان) در دقت پیشبینی با کاهش RMSE از مدل بهینه (4) به (2) یا (3) تعیین شد.
3. نتایج
3.1. تعداد گل و میوه به دست آمده از تصویر و مشاهده شده در مزرعه
ما با پیشبینی تعداد بازه ششم شروع کردیم زیرا باید دادههای کافی برای تخمین مدل کنار گذاشته شود. هنگامی که معیارهای تصویری در دسترس بودند، مدل بهینه برای پیشبینی تعداد گلها معادلهای بود که بر اساس زمان و مجذور عبارت آن، تعداد گلهای حاصل از تصویر و حجم سایهبان ساخته شده بود (مدل 1.a در جدول 3 ). مقدار کل RMSEهای پیشبینی در طول فصل 105 بود که نشاندهنده درصد خطای پیشبینی 26.3 درصد است زیرا تعداد کل واقعی تعداد گلها در همان دوره 400 بهطور میانگین محاسبه شد. همچنین، خوب بودن برازش مدل (1) هنگامی که با داده های خارج از فصل تخمین زده شد به 88.2٪ رسید، به این معنی که 88.2٪ از تغییرات تعداد گل واقعی در طول فصل را می توان با متغیرهای پیش بینی توضیح داد.
مدل بهینه شناسایی شده برای پیش بینی تعداد میوه ( جدول 3 ، مدل 1.b) مشابه مدل پیش بینی تعداد گل بود. تعداد کل میوه واقعی در طول دوره پیش بینی 1042 بود، در حالی که مدل RMSE 268 را ایجاد کرد که نشان دهنده درصد خطای پیش بینی 25.7٪ است. خوب بودن تناسب برای شمارش میوه به 92.6 درصد رسید. به طور خلاصه، این نتایج نشان میدهد که روابط پیشبینی میتواند بین تعداد میوهها و گلهای مشتقشده از تصویر و موارد مشاهدهشده در مزرعه ایجاد شود، که توجیههایی برای استفاده از تعداد مشتقشده از تصویر و متغیرهای اندازه تاج برای پیشبینی عملکرد فراهم میکند.
3.2. پیش بینی بازده بر اساس تصاویر، آب و هوا و ویژگی های تاج پوشش
مدلهای پیشبینی عملکرد در سطح کرت با استفاده از مدلهای رگرسیون خطی که عملکرد را به همه متغیرهای پیشبینیکننده موجود، از جمله زمان، بازده قبلی در فصل، آبوهوا، تعداد گلها و میوههای حاصل از تصویر، و متغیرهای اندازه تاج پوشش مرتبط میکند، توسعه داده شدند. به طور مشابه، RMSE برای ارزیابی دقت پیشبینی و انتخاب متغیرهای پیشبینیکننده استفاده شد. یک مدل پیشبینی ابتدا با متغیرهای پیشبینیکننده ساده و قابل دسترسی، مانند زمان و بازده قبلی آغاز شد، و سپس متغیرهای آبوهوا اضافه شد، تا زمانی که تمام معیارهای تصویرسازی در مدل گنجانده شد (مدلهای 2، 3، و 4 در جدول 4 ). تجزیه و تحلیل رگرسیون خطی برای پیشبینی عملکرد در بازههای زمانی مختلف، از جمله 3-4 روز قبل از برداشت، 1 هفته قبل از برداشت، و 3 هفته قبل از برداشت، اجرا شد و نتایج در زیر نشان داده شده است.جدول 4 .
ما با پیش بینی عملکرد فاصله 13 در 3-4 روز قبل از برداشت شروع کردیم. RMSE تولید شده از مدل پیشبینی بهینه براساس بازده و زمان قبلی 1222 تخت بود و خوبی تناسب تنها به 75.1٪ رسید (مدل 2.a در جدول 4 ). پرورش دهندگان اغلب شرایط آب و هوایی آینده را در نظر می گیرند، با توجه به اینکه آب و هوا نقش مهمی در رشد میوه دارد. اگرچه بسیاری از متغیرهای آب و هوا از نظر آماری اثرات معنیداری بر عملکرد دارند، تنها دمای هوا و بارندگی به بهبود دقت پیشبینی کمک کردند. با این حال، مدل پیشبینی بهینه، حتی با دادههای واقعی آب و هوا، RMSE 1172 آپارتمان در هر هکتار را ایجاد کرد (مدل 3.a در جدول 4) .)، تنها 4 درصد از نظر دقت پیشبینی افزایش یافته است. دقت پیشبینی میتواند بدتر باشد زیرا پیشبینیهای آب و هوا همیشه برای شرایط واقعی دقیق نیستند. با این وجود، با توجه به اینکه عملکرد کل در طول فصل به طور متوسط 2528 آپارتمان در هر هکتار بود، خطای پیشبینی بزرگ بود. عملکرد ضعیف پیشبینی عملکرد نشاندهنده نیاز صنعت یا محققان به توسعه ابزارها یا روشهای جدید برای بهبود دقت پیشبینی است. نتایج ما نشان میدهد که دادههای تصویری، مانند تعداد میوههای حاصل از تصویر و حجم تاج پوشش، بهویژه در بهبود عملکرد پیشبینی مؤثر بودند. RMSE پیشبینی به 866 آپارتمان در هر هکتار کاهش یافت که هم تعداد میوههای حاصل از تصویر و هم حجم تاج پوشش در مدل گنجانده شد (مدل 4.a در جدول 4) .) که به ترتیب 29 و 26 درصد کمتر از مدل 2.a و مدل 3.a است. خوبی تناسب نیز به 83.4 درصد افزایش یافت.
عملکرد پیشبینی عملکرد در یک هفته قبل از برداشت نیز دلگرمکننده بود. RMSE پیش بینی از 1362 آپارتمان در مدل پیش بینی تنها با استفاده از بازده میوه قبلی و زمان (مدل 2.b در جدول 4 ) به 1307 آپارتمان با استفاده از متغیرهای آب و هوا (مدل 3.b در جدول 4 ) به 1122 آپارتمان با استفاده از متغیرهای تصویری کاهش یافت. مدل 4.b در جدول 4 ). معیارهای تصویرسازی به افزایش دقت پیشبینی 14 تا 18 درصد کمک کردند. در همین حال، حسن تناسب به 92.1 درصد افزایش یافت. در مک کنزی و چندلر [ 2] معادلات پیشبینی با تعداد گلهای جمعآوریشده دستی به عنوان ورودی، خوب بودن تناسب تنها 89 درصد بود. در نهایت، مدلهای پیشبینی بازده سه هفتهای جلوتر هنگام بهرهبرداری از دادههای تصویری، تناسب قویتری ارائه کردند. خوبی تناسب تا 97% بود و RMSE در مدل 4.c در مقایسه با مدل 2.c 10% کاهش یافت ( جدول 4 ). توجه داشته باشید که شمارش گل و میوه برگرفته از تصویر در زمانهای برداشت قبلی در مدل 4 استفاده شد، زیرا توتفرنگیهای رسیده معمولاً چندین هفته پس از شکوفهدهی گیاهان برای برداشت آماده بودند.
4. بحث
این مطالعه امکان استفاده از تصاویر با وضوح زمانی بالا را برای استخراج اطلاعات اندازه تاج و همچنین تعداد میوه ها و گل ها برای پیش بینی عملکرد توت فرنگی در طول فصل توت فرنگی نشان داد. نتایج نشاندهنده بهبود قابلتوجهی در دقت پیشبینی در مقایسه با مدلهایی است که تنها بازده قبلی را که در شیوههای فعلی اتخاذ شده است، استفاده میکنند.
ضبط تصویر با نصب دوربین ها بر روی تجهیزات مزرعه انجام شد، که می توانست به راحتی در عملیات استاندارد مزرعه ادغام شود. اگرچه ما از یک GNSS با کیفیت نظرسنجی برای پردازش دادههای مورد استفاده در این مطالعه استفاده کردیم، اما با استفاده از یک سیستم هزینه کمتر که از دادههای GNSS از پلت فرم تلفن همراه استفاده نمیکند، آزمایش کردیم و به نتایج یکسانی دست یافتیم که فقط روی نقاط کنترل زمینی ایجاد شده در ابتدا حساب میشد. فصل این امر باعث می شود که سیستم جمع آوری و تحریک تصویر، که کمتر از 1500 دلار هزینه دارد، به عنوان سرمایه گذاری اصلی برای به دست آوردن داده های مورد استفاده در این مطالعه، باقی بماند. چنین هزینهای سربار کوچکی در نظر گرفته میشود که میتواند توسط همه تولیدکنندگان قابل پرداخت باشد.
استخراج اطلاعات تاج به صورت خودکار با استفاده از مدل های تحلیل جغرافیایی انجام شد. اگرچه این مدل ها می توانند هزاران گیاه را در چند ساعت تجزیه و تحلیل کنند [ 31]، ما بر این باوریم که مدلها این پتانسیل را دارند که به عنوان یک سرویس سرور برای مشتریان وب به عنوان گامی به سوی پیادهسازی تجاری ارائه شوند. شمارش گل و میوه به صورت دستی انجام شد تا امکان شناسایی بصری گلها و میوهها بر روی تصاویر گرفته شده توسط سکو از جهات مختلف (چند نمای) و نمایش آنها به موزاییک اصلاحشده فراهم شود. این فرآیند در مقایسه با استفاده از تصویر موزاییکی اصلاحشده، امکان شناسایی بیشتر گلها و میوههای پنهان شده در زیر سایبان را فراهم کرد. یک الگوریتم یادگیری عمیق با استفاده از تشخیص و شمارش گل و میوه Multiview توسط نویسندگان در حال توسعه است. ادغام مدلهای پیشبینی توتفرنگی در عملیات مزرعهای در مقیاس بزرگ میتواند توسط تک تک تولیدکنندگان در صورت استفاده از تخصص تجزیه و تحلیل جغرافیایی خاص به دست آید. با این حال،
RMSEهای مدلهای پیشبینی عموماً بالا بودند. کوچکترین RMSE برای مدل پیشبینی 3-4 روزه به دست آمد. با این حال، این مدل پس از ترکیب معیارهای تصویر تاج به دست آمد. ترکیب متغیرهای متریک تصویر تاج به دست آمده از تصاویر، دقت پیشبینی را برای همه مدلها به میزان 10 تا 29 درصد بهبود بخشید که اهمیت استفاده از فناوریهای تصویربرداری در پیشبینی بازده توت فرنگی را برجسته کرد.
نتایج ما نشان میدهد که پیشبینی مدل آماری با دادههای تصویری و سایر دادههای آبوهوای موجود و عملکرد قبلی با عملکرد اندازهگیری شده مطابقت دارد که میتواند اولین گام به سمت مدلهای پیشبینی توت فرنگی باشد که به تولیدکنندگان کمک میکند تا عملیات برداشت و بازاریابی خود را برنامهریزی کنند. با این وجود، ما معتقدیم که ترکیب پارامترهای فیزیولوژیکی توت فرنگی در مرحله بعدی پیش بینی مدل توت فرنگی ضروری است. مدلهایی که امواج بازده توتفرنگی را که میتوانند با شرایط آب و هوایی و ژنوتیپها مرتبط باشند، برای دستیابی به دقت پیشبینی بهبود یافته ضروری هستند. اثر عوامل استرس زای آفات و بیماری نیز می تواند در مدل پیش بینی از طریق اطلاعات تصویر طیفی گنجانده شود.
5. نتیجه گیری ها
دادهها و نتایج تجزیهوتحلیلشده در این مطالعه شواهد قوی ارائه میدهند که تصاویر با وضوح بالا با برد نزدیک گرفته شده در مزرعه در طول فصل توتفرنگی میتواند ابزار ارزشمندی برای پیشبینی عملکرد توت فرنگی در مقیاسهای زمانی مختلف باشد که میتواند دارایی ارزشمندی برای مزرعه توت فرنگی باشد. مدیریت و بازاریابی متغیرهای اندازه تاج پوشش استخراج شده از تصاویر به دست آمده مانند مساحت تاج پوشش، حجم، انحراف استاندارد ارتفاع، و تعداد میوه و گل که به صورت بصری از تصاویر تفسیر شده اند برای پیش بینی تعداد واقعی گل و میوه با درصد خطاهای پیش بینی به ترتیب 26.3 و 25.7 درصد استفاده شد. . به طور مشابه، این مطالعه امکان توسعه مدل های آماری پیش بینی عملکرد توت فرنگی را در فواصل زمانی مختلف (3 تا 4 روز قبل از برداشت، 1 هفته قبل از برداشت،) نشان می دهد. و 3 هفته قبل از برداشت) با استفاده از متغیرهای اندازه تاج پوشش و همچنین تعداد گل و میوه، متغیرهای آب و هوا، و داده های عملکرد قبلی. روش پیشبینی خارج از نمونه نشان میدهد که دقت پیشبینی مدلهایی با متغیرهای مشتقشده از تصویر میتواند 10 تا 29 درصد در مقایسه با مدلهایی که این متغیرها را ندارند افزایش یابد، که حاکی از اهمیت اطلاعات تصویری برای پیشبینی بازده است.









بدون دیدگاه