

چکیده
انیمیشن سری های زمانی نقشه های choropleth به راحتی از محدودیت های ادراکی ما فراتر می رود. در این تحقیق تجربی، ما تأثیر تعمیم ارزش حفظ پرت محلی نقشههای choropleth متحرک را بر توانایی تشخیص روندهای کلی و انحرافات محلی آن بررسی میکنیم. مقایسه تعمیم در فضا، در زمان، و در ترکیبی از هر دو بعد، هموارسازی ارزش بر اساس یک همسایگی فضایی مرتبه اول، تشخیص نقاط پرت محلی را به بهترین وجه تسهیل کرد، به دنبال آن انواع تعمیم مکانی و زمانی. ما هیچ مدرکی پیدا نکردیم که تعمیم ارزش به تشخیص روندهای جهانی کمک کند.
کلید واژه ها:
انیمیشن نقشه choropleth ; نقاط پرت محلی ; تعمیم
1. مقدمه
انیمیشن زمانی نقشههای choropleth یک روش محبوب برای به تصویر کشیدن دادههای سری زمانی جمعآوریشده در واحدهای شمارش است. اگرچه فیلمهای حاصل از عکسهای فوری نقشههای choropleth برای درک مفهومی ساده هستند، اما اغلب از محدودیتهای ادراکی ما فراتر میروند [ 1 ].
هنگام مشاهده توالی برش های زمانی، کاربران به راحتی می توانند تغییرات مهم در نقشه را در طول یک ساکاد [ 2 ] یا به دلیل سیگنال های تغییر ضعیف از مناطق بدون مراقبت از دید محیطی از دست بدهند [ 3 ، 4 ]. با این حال، حتی زمانی که افراد ظاهراً تغییرات غالباً همزمان در توالی سریع نقشهها را احساس میکنند، به راحتی تحت تأثیر حجم عظیم اطلاعات گذرا قرار میگیرند و اغلب در به دست آوردن مدلهای ذهنی مناسب از فرآیند نقشهبرداری شده شکست میخورند [ 1 ]. بر اساس نظریه بار شناختی [ 5 ، 6 ]، گلوگاه شناختی حافظه کاری بصری است که قادر به ذخیره بیش از چهار شی جدید به طور همزمان نیست [ 7 ]]. اطلاعات بصری، مانند اشیایی که رنگ خود را در نقشه تغییر می دهند، باید در حافظه بلندمدت جابجا شوند تا درک شوند و بیشتر بر روی آن بسازید. اگر اطلاعات جدیدی در طی این فرآیند به دست آید، مبادله بین حافظه فعال و حافظه بلند مدت یا با تغییر توجه به اشیاء بصری جدید لغو می شود (“مهار فعال”)، یا به دلیل مسدود شدن منابع حافظه کاری قبلی نمی توان اشیاء جدید را درک کرد. اشیاء (“بازداری ماسبق”) [ 1 ]. “سرریز شناختی” حاصل در موقعیتهای تقسیم توجه بیشتر تشدید میشود، برای مثال، زمانی که کاربر سعی میکند به طور همزمان محتویات نقشه در حال تغییر و افسانه (زمانی) آن را درک کند [ 8 ].
1.1. راه حل های پیشنهادی برای کاهش بار شناختی
نقشهبرداران راههایی را برای کاهش بار شناختی و قابل دسترستر کردن انیمیشنها بررسی کردند. در حالی که بسیاری از ایده ها با طراحی رابط کاربری با هدف ضمنی یا صریح برای به حداقل رساندن تقسیم توجه و/یا به حداکثر رساندن کنترل کاربر مرتبط هستند [ 9 ، 10 ، 11 ، 12 ، 13 ، 14 ]، برخی دیگر بر انتقال بین مراحل زمانی تمرکز می کنند. 15 ، 16 ]، در مورد تکنیک هایی برای برجسته کردن تغییرات مهم [ 17 ]، یا در مورد رابطه بین پیچیدگی داده و سرعت انیمیشن. Multimäki و Ahonen-Rainio [ 18] مقیاس زمانی را با توجه به تراکم زمانی تغییر برابر کنید، انیمیشن را در مواقع شلوغ کند می کند، در حالی که سرعت انیمیشن را در زمانی که تعداد تغییرات کم است افزایش می دهد. اگرچه این برای محدود کردن بار شناختی مفید به نظر می رسد، احتمالاً در انتقال ساختار زمانی در توسعه فرآیندهای فضایی ناکام است. علاوه بر این، افزایش زمان برای محدود کردن میزان تغییر بین دو فریم بعدی به دادههای کافی نیاز دارد. در صورت فرکانس نمونه برداری زمانی کم، مقدار تغییر بین دو مرحله زمانی/فریم مجاور ممکن است از محدودیت های شناختی فراتر رود، صرف نظر از سرعت کم انیمیشن. بنابراین، علاوه بر رابط های کاربری مناسب، رویکردهایی مورد نیاز است که با کاهش پیچیدگی بصری خود داده ها با استفاده از تعمیم، بار شناختی را کاهش دهد.
به منظور حذف «سوسو زدن» در انیمیشنهای نقشه choropleth ناشی از تغییرات ارزش جعلی در طول زمان، Monmonier [ 19 ] یک الگوریتم طبقهبندی را توسعه داد که سعی در بهینهسازی شکستهای کلاس در این رابطه داشت. از آنجایی که مشخص شد که این مشکل نمیتواند به اندازه کافی با طبقهبندی دادهها (شریف) حل شود، او به جای آن از میانگینگیری زمانی حمایت کرد و در مورد سودمندی هستههایی که به طور همزمان دادهها را در بعد مکانی و زمانی هموار میکنند، فرضیهای را مطرح کرد [ 20 ]. هاروور [ 21 ] مزایای تجمع مکانی و زمانی را برای تسهیل تشخیص تغییر در یک انیمیشن زمانی داده های سنجش از دور برجسته کرد. ارائه توصیه های کلی برای طراحی نقشه متحرک موثر، هاروور [ 10] از نقشههای متحرک بسیار تعمیمیافته با استفاده از فیلتر کردن دادهها، هموارسازی دادهها یا تجمیع دادهها در دو یا سه کلاس حمایت میکرد. حتی اگر بعداً اظهارات خود در مورد استفاده از طبقه بندی را پس گرفت [ 22 ]، او دوباره تأکید کرد که فیلتر کردن و صاف کردن یک اصل مهم طراحی نقشه های متحرک برای ارائه یک “تصویر بزرگ” منسجم است [ 9 ].
1.2. شکاف تحقیق
تا آنجا که ما می دانیم، تنها یک مطالعه تجربی وجود داشته است که به تعمیم در نقشه های کروپلث متحرک پرداخته است: McCabe [ 23] اثرات تجمع زمانی و هموارسازی زمانی را بر روی دو کار (انتخاب کادر نقشه با بالاترین مقادیر کلی، مقایسه مقادیر تجمعی بین دو منطقه در کل انیمیشن) مربوط به تفسیر دادههای اپیدمی سرخک در نیجر بررسی کرد. برای هر دو کار، او نتوانست مزایایی از میانگینگیری موقت دادهها بیابد، بلکه تمایلی غیر قابل توجه پیدا کرد که شرکتکنندگانی که از دادههای هموار موقتی استفاده میکردند، حتی در انتخاب قاب نقشه «حداکثر» عملکرد بدتری داشتند، که به دلیل هموارسازی قابل درک است. اوج های آنی با توجه به این تصور که نقشه های متحرک choropleth برای به دست آوردن یک دید کلی از توسعه فرآیند فضایی بسیار مفید هستند [ 22 , 24 , 25] و نقاط پرت محلی قابل توجه (چند ضلعی هایی با مقادیر بسیار متفاوت از همسایگانشان در مکان و زمان) [ 26 ]، جای سوال است که آیا وظایف در آزمایش مک کیب بهترین انتخاب برای مقابله با مزایای بالقوه تعمیم نقشه های کروپلث متحرک بوده است یا خیر. برای پر کردن این شکاف، آزمایشی را برای ارزیابی تأثیر تعمیم ارزش حفظ نقاط پرت محلی در فضا، در زمان و در ترکیبی از هر دو بعد بر روی تشخیص روندهای کلی و نقاط پرت محلی در نقشههای کروپلث متحرک انجام دادیم.
1.3. سازمان اسناد
در بخش بعدی، طرح آزمایش خود را نشان میدهیم و گروهی متشکل از 440 نفر از افراد آزمون را که در مطالعه ما شرکت کردند، مشخص میکنیم. سپس، تجزیه و تحلیل دادههای بهدستآمده را ارائه میکنیم، در حالی که بینشهایی را از یک مطالعه آزمایشی گسترده اضافه میکنیم و به طور کامل نتایج خود را در پرتو درک و شناخت نقشههای متحرک مورد بحث قرار میدهیم. ما با چشم انداز فرصت های تحقیقاتی آینده نتیجه گیری می کنیم.
2. روش ها
برای اینکه بفهمیم آیا و چگونه اشکال مختلف تعمیم ارزش انیمیشنهای نقشه choropleth طبقهبندینشده بر توانایی کاربران در تشخیص روندهای کلی و نقاط پرت محلی آن تأثیر میگذارد، آزمایش آنلاین زیر را توسعه دادیم: شرکتکنندگان انیمیشنهای کوتاه و مصنوعی نقشه را دیدند که هر کدام از یک نقشه تشکیل شده بود. روند کلی و دو نقطه پرت محلی در فضا و زمان. بلافاصله پس از پایان هر انیمیشن، مجموعه ای متشکل از شش نامزد پرت (بخش اول آزمایش) یا سه نامزد گرایش (بخش دوم آزمایش) جایگزین آن شد. از میان این مجموعهها، شرکتکنندگان باید به ترتیب مقادیر پرت و روند صحیح را انتخاب میکردند. با استفاده از نسخههای تعمیمیافته متفاوت انیمیشنهای ارائهشده (نسخههای مرجع غیر تعمیمیافته، نسخههای تعمیمیافته زمانی، مکانی و مکانی-زمانی)،
2.1. محرک های نقشه متحرک
هر محرک انیمیشن نقشه ای از 85 چند ضلعی نامنظم اما مشابه را نشان می دهد که از 14 فریم نقشه تشکیل شده است. در اندازه 512 × 512 پیکسل و با سرعت پنج فریم بر ثانیه نمایش داده شد. مقادیر چند ضلعی در GAMA شبیه سازی شد ( https://gama-platform.github.io) با استفاده از مدلی که خوشههای متحرک را در یک روند جهانی تولید میکند و به طور تصادفی نقاط پرت محلی را به دادههای بسیار همبسته خودکار در فضا و زمان اضافه میکند. از تعداد زیادی از نتایج شبیهسازی، ما محرکهای نقشه نهایی را انتخاب کردیم که دقیقاً شامل دو چندضلعی پرت محلی در فضا و زمان بود. نقاط پرت محلی توسط یک اکتشافی تعیین شدند که تفاوت ارزش چند ضلعی ها را با همسایگی مکان-زمان مرتبه اول آنها ارزیابی می کند، در حالی که همبستگی خودکار جهانی داده ها را در نظر می گیرد (برای جزئیات بیشتر به Traun و Mayrhofer [ 26 ] مراجعه کنید). خود همبستگی مکانی-زمانی همه محرکها تقریباً مشابه موران است [ 27] بین 0.84 و 0.93. از این محرکهای مرجع، ما سه نسخه تعمیمیافته متفاوت را با هموارسازی مقادیر چند ضلعی توسط همسایههای مکانی، مکانی-زمانی یا زمانی مرتبه اول آنها بهترتیب استخراج کردیم، در حالی که دو چندضلعی پرت محلی را از فرآیند تعمیم مستثنی کردیم. برای هموارسازی دادهها، از روشها و نرمافزار ارائهشده توسط Traun و Mayrhofer [ 26 ] استفاده کردیم و یک طرح رنگی متوالی زرد تا قهوهای مبتنی بر درونیابی آزمایشگاهی CIE را برای دادههای طبقهبندینشده، با استفاده از کشش حداقل حداکثری خطی اعمال کردیم ( شکل 1). ).
2.2. موارد پاسخ
پس از مشاهده یک محرک، شرکت کنندگان باید به ترتیب از میان مجموعه ای از نامزدهای پرت و گرایش، نقاط پرت محلی صحیح (بخش اول آزمایش) و روند جهانی مناسب (بخش دوم) را انتخاب می کردند.
2.2.1. موارد پاسخ پرت
شش نقشه پایه، که هر کدام یک نامزد پرت را برجسته میکنند، شامل دو نقطه پرت صحیح از محرک و چهار نامزد پرت اشتباه است ( شکل 2 ).
بر خلاف نامزدهای پرت صحیح، نامزدهای پرت اشتباه در کل انیمیشن تفاوت ارزش کمی با همسایگی زمانی مکانی خود دارند. همراه با توزیع پراکنده نامزدهای پرت بر روی نقشه پایه، این باید از تفسیر نادرست چند ضلعی های غیر پرت به عنوان نقاط پرت محلی جلوگیری کند.
2.2.2. موارد پاسخ روند
آیتم های پاسخ روند جهانی با کاهش مقیاس محرک های نقشه متحرک به 160 × 160 پیکسل و اعمال یک فیلتر تاری 15 پیکسل تولید شدند ( شکل 3 ). برای جلوگیری از شناسایی اقلام پاسخ روند توسط شرکت کنندگان نه بر اساس روند، بلکه از موقعیت نقاط پرت محلی، قبل از اعمال فیلتر، آنها را با میانگین ارزش/رنگ همسایگان خود جایگزین کردند. در حالی که آیتم های پاسخ روند جهانی صحیح از انیمیشن های محرک مربوطه تولید شدند، دو مورد جایگزین (اشتباه) در هر مجموعه آیتم پاسخ از سایر محرک ها یا نامزدهای محرک استفاده نشده مشتق شدند. هر مورد پاسخ با یک کلیک ماوس شروع می شود و می تواند هر چند وقت یکبار که می خواهید دوباره پخش شود. موارد پاسخ همراه با سایر داده های این تحقیق در https://tinyurl.com/mapstudyresults موجود است.همانطور که در بیانیه در دسترس بودن داده ها در انتهای این سند ذکر شده است.
2.3. طراحی و اجرای مطالعه
ما برای یک طرح مطالعه ترکیبی تصمیم گرفتیم که مبتنی بر چهار گروه بین طرح موضوعی، با توجه به حالتهای تعمیم (A-مرجع تعمیمیافته، B-تعمیم فضایی، تعمیم فضایی-زمانی C، و تعمیم زمانی D-مراجعه کنید به محرک 2، 3 و 4 در شکل 4 ).
از نتایج یک مطالعه آزمایشی، ما فرض کردیم که تعمیم فضایی ممکن است بیشترین تأثیر را بر ادراک داشته باشد. بنابراین ما یک استراتژی پشتیبان برای تعداد مشارکت کم و اندازه اثر کوچک ایجاد کردیم و طراحی چهار گروهی را برای محرک 2، 3 و 4 با یک (دو اندازه) دو گروهی بین آزمودنی به اضافه یک طرح درون موضوعی برای محرک 1 تکمیل کردیم. در حالی که محرک 1 به دو حالت (نسخه تعمیمنشده و تعمیمناپذیر فضایی) محدود بود، هر شرکتکننده مرجع غیرتعمیمیافته و نسخه کلی فضایی این محرک را در هر دو بخش آزمایش مشاهده کرد (به محرک 1.1 و 1.2 در شکل 4 مراجعه کنید).
این آزمایش به عنوان یک مطالعه آنلاین راه اندازی شد. برای جلوگیری از استفاده از نمایشگرهای کوچک، شرکت به سیستم عامل های دسکتاپ محدود شد. پیش بارگذاری محرک پخش بدون وقفه را در صورت پهنای باند کم اینترنت تضمین می کند.
پس از پذیرش دعوت، شرکت کنندگان ویدئویی را مشاهده کردند که وظیفه جستجوی دو نقطه پرت محلی را در یک انیمیشن محرک نمونه و نشان دادن انتخاب موارد پاسخ توضیح می داد. سپس دادههای مربوط به متغیرهای کنترل کننده سن، جنس، اختلالات بینایی، تجربه استفاده از نقشه، فراوانی بازیهای رایانهای و بالاترین سطح تحصیلات جمعآوری شد. شرکتکنندگان قبل از اینکه اولین مجموعه از توالیهای محرک را طی کنند، تشخیص دور از هم را با یک محرک آزمایشی تمرین کردند. سپس به طور تصادفی به یکی از چهار گروه تقسیم شدند ( شکل 4 ). هر دنباله محرک شامل سه مرحله است:
-
3 ثانیه شمارش معکوس و شروع خودکار انیمیشن.
-
جایگزینی فوری انیمیشن با آیتمهای پاسخ برای افراد پرت محلی برای انتخاب ( شکل 2 ).
-
رتبه بندی سختی کار.
پس از پایان بخش اول، از شرکت کنندگان خواسته شد تا در مورد استراتژی های بالقوه برای شناسایی و به خاطر سپردن موارد پرت نظر دهند. سپس، آنها یک ویدیوی آموزشی در مورد تشخیص روند را دیدند و قبل از ورود به بخش دوم آزمایش، دوباره با یک محرک آزمایشی تمرین کردند. در آنجا، هر گروه دقیقاً همان محرکها را از قسمت اول دید، اما باید از بین سه گزینه، آیتم پاسخ روند صحیح را انتخاب میکرد ( شکل 3 ). در نهایت، شرکتکنندگان در مورد استراتژیهای تشخیص روند گزارش دادند و از آنها در مورد نظرسنجی کلی و هر گونه مشکل (فنی) که با آن مواجه شدند، بازخورد خواستند.
2.4. شرکت کنندگان و داده ها
مطالعه اصلی در دسامبر 2020 انجام شد. دعوتنامهها از طریق رسانههای اجتماعی توزیع شد و از طریق ایمیل برای دانشجویان جغرافیا و دانشجویان/فارغ التحصیلان اخیر از یک برنامه آموزش از راه دور در GIS با درخواست برای انتشار بیشتر ارسال شد. این تلاش منجر به 308 مجموعه داده کامل با اندازههای گروهی کمی متفاوت، توزیعهای سنی متفاوت و شرکتکنندگان مرد بهطور قابل ملاحظهای شد. برای تعادل بیشتر در این جنبه ها و در نظر گرفتن تجربیات مثبت در استفاده از خدمات جمع سپاری آنلاین در آزمایشات شناختی [ 28 ]] ما داده ها را با پاسخ های crowdworker تکمیل کردیم. با استفاده از نمونه گیری طبقه بندی شده از نظر سن و جنس، ما 169 کارگر جمعی را در پلتفرم clickworker.de به دست آوردیم. هر یک از آنها 1.10 یورو برای سرمایه گذاری زمانی خود (میانگین: 9 دقیقه) جبران شد. از مجموعه ترکیبی 477 پاسخ، ما به طور تصادفی سه پاسخ مرد از گروه B و دو پاسخ مرد از گروه C را حذف کردیم تا گروه هایی با اندازه مساوی داشته باشیم. با اشاره به کرامپ و همکاران. [ 28]، با محاسبه شاخص کیفیت (تماشای ویدیوها تا پایان، زمان استفاده شده برای ارائه دادههای شخصی و نظرات، عملکرد کلی پرت و تشخیص روند) از شر تلاشهای بیرویه خلاص شدیم و بدترین چهار تلاش مرد و زن را از هر گروه حذف کردیم. مجموعه داده نهایی شامل چهار گروه با اندازه مساوی است که هر کدام شامل 55 پاسخ مرد و 55 زن است. برای توزیع سنی و سهم کارگران در هر گروه به شکل 5 و شکل 6 مراجعه کنید. توزیع صلاحیت های نقشه برداری بین شرکت کنندگان در جدول 1 آورده شده است.
برای تجزیه و تحلیل اینکه آیا مردم انیمیشنهای نقشه تعمیمیافته را ترجیح میدهند یا نه، مطالعه اصلی با دادههای مطالعه آزمایشی گسترده ما تکمیل شد، که همچنین در قالب آنلاین انجام شد. در آنجا، 334 نفر (متفاوت) یک مقایسه بینهایت حلقهای و متوالی (A = مرجع، B = نسخه تعمیمیافته فضایی) محرک 4 را دیدند و از آنها خواسته شد که تفاوتها را به صورت شفاهی توصیف کنند و اولویتها را صادر کنند.
3. نتایج
تجزیه و تحلیل آماری در R [ 29 ]، عمدتاً با استفاده از بسته npmv [ 30 ] انجام شد. این توزیع های چند متغیره را برای یک متغیر توضیحی واحد (مانند حالت تعمیم) با استفاده از تکنیک های ناپارامتریک مقایسه می کند و حتی برای نمونه های کوچک مناسب است. با استفاده از تقریبهای آماری آزمون ANOVA Type، Wilks’ Lambda، Lawley Hotelling و Bartlett Nanda Pillai به همراه تستهای جایگزینی، این بسته به ما اجازه میدهد تا نتایج حداکثر هشت روش آزمایش آماری را مقایسه کنیم، در حالی که تعداد واقعی آزمونهای قابل اجرا بستگی به ساختار داده [ 30 ]. به استثنای یک استثنا، ما توافق خوبی بین آزمایشهای مختلف دریافت کردیم که نشانهای برای پایداری نتایج بهدستآمده استp – مقادیر همانطور که توسط Ellis، Burchett، Harrar و Bathke توصیه شده است [ 30 ]، و برای خوانایی، مقادیر p برای Wilks’ Lambda هر زمان که این آزمایش قابل اجرا بود گزارش می شود. در تمام موارد دیگر، p -values را از آزمون نوع ANOVA ارائه می کنیم. مقادیر p گزارش شده با Bonferroni برای آزمایش چندگانه تصحیح شد.
3.1. تشخیص بیرونی محلی
برای هر فرد و نمونه محرک، تعداد نقاط پرت محلی به درستی شناسایی شده (0-2) و نقاط پرت به اشتباه نشان داده شده (تا 4 “مثبت کاذب” ممکن) ثبت شد.
3.1.1. نقاط پرت محلی به درستی شناسایی شده است
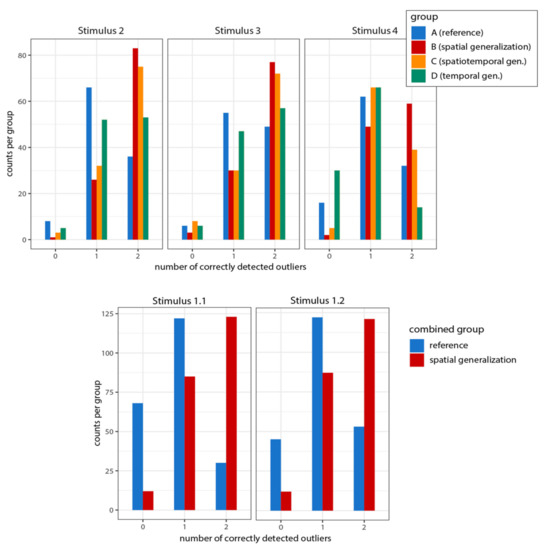
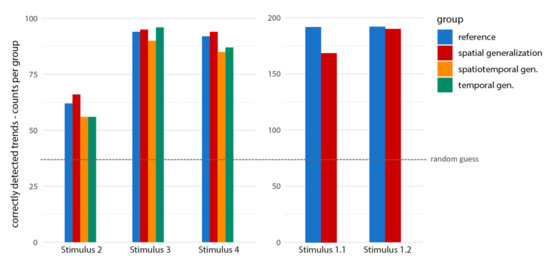
برای مشاهده تأثیر متغیر مستقل “حالت تعمیم” بر توانایی تشخیص صحیح نقاط پرت محلی، تعداد مطلق در هر گروه (A,B,C,D) را برای 0، 1 و 2 پرت صحیح برای هر یک از آنها خلاصه کردیم. محرک های 2، 3، و 4. برای محرک های 1.1 و 1.2، گروه های A + D و B + C را همانطور که در شکل 4 نشان داده شده است، ترکیب کردیم و فرکانس های 0، 1 و 2 را بر این اساس صحیح محاسبه کردیم. الگوی به دست آمده ( شکل 7 ) به وضوح نشان می دهد که تعمیم (حفظ پرت) با استفاده از همسایگان مستقیم در فضا، تشخیص هر دو نقطه پرت محلی را به بهترین وجه تسهیل می کند، و به دنبال آن انواع تعمیم مکانی-زمانی و زمانی.
افرادی که محرک های تعمیم یافته را دیده بودند در همه موارد به جز یک نمونه از پاسخ دهندگان گروه مرجع بهتر عمل کردند: برای محرک 4، نوع هموار شده موقت منجر به ضعیف ترین نتایج شد. با این حال، ما هیچ معنای خاصی را به این موضوع نسبت نمیدهیم، زیرا دقیقاً این دو نوع (مرجع و نسخه کلی تعمیمیافته) محرک 4 را در مطالعه آزمایشی خود آزمایش کرده بودیم. نتایج نشان داد که عملکرد تشخیص پرت کاملاً مشابه برای هر دو گروه شامل 84 و 82 نفر (متفاوت) بود. بنابراین، ما این ناهماهنگی را در آزمایش اصلی یک عدد پرت آماری میدانیم.
آزمایش آماری جهانی (ترکیب برای محرکهای 2، 3 و 4) برای هر یک از 3 نوع تعمیم در برابر گروه مرجع، فرضیه صفر (بدون تفاوت) را در سطح 0.01 = α رد کرد ( p <0.001). با این حال، هنگامی که متغیر زمانی را در برابر مرجع فقط برای محرک 2 و 3 آزمایش میکنیم در حالی که نتیجه نامنظم را از محرک 4 حذف میکنیم، نتیجه (بونفرونی تصحیح شده) دیگر معنیدار نیست ( p = 0.22). بنابراین، اثر حفظ پرت، تعمیم زمانی بر تشخیص پرت مشکوک به نظر می رسد.
تجزیه و تحلیل آماری نتایج گروه دو اندازه از محرک های 1.1 و 1.2 تأثیر بسیار مهم حفظ هموارسازی پرت در فضا را بر تشخیص محلی پرت تایید می کند ( p< 0.001). عملکرد نسبتاً بهبود یافته گروه مرجع در محرک 1.2 احتمالاً ناشی از استراتژیهای در حال تکامل برای تشخیص نقاط پرت محلی هنگام قرار گرفتن در معرض این محرک (آخرین) است. یک تست متقاطع درون فرد اضافی بر اساس محرک 1 نتیجه آزمون های بین گروهی را بیشتر تایید می کند: برای هر فرد، تعداد موارد پرت که به درستی شناسایی شده از نسخه تعمیم یافته از عدد مطابق با محرک مرجع تعمیم نیافته کم شد. برای توزیع حاصل، فاصله اطمینان راهاندازی 95% برای میانگین با [-0.640، 0.493-] داده میشود و فرضیه صفر (میانگین برابر است با 0) رد میشود.
3.1.2. نقاط پرت مثبت کاذب
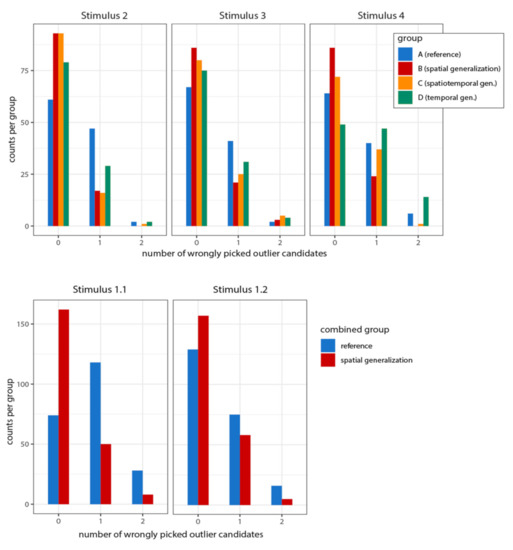
از آنجایی که افراد آزمون از وجود دو نقطه پرت محلی در هر انیمیشن مطلع شدند، احتمال تئوری سه یا چهار انتخاب اشتباه رخ نداد. در بیشتر موارد، صفر یا یک نامزد اشتباه انتخاب شدند ( شکل 8 ). اگرچه نتایج برای تصحیح شناسایی پرت متقابل نیستند، اما از خطوط مشابه و در عین حال معکوس پیروی می کنند (در این مورد کمتر «بهتر» است).
تفاوتهای بین گروه مرجع و گروههای مکانی و مکانی بسیار قابل توجه است ( 001/ 0p <)، که هر دو گروه به طور مداوم از گروه مرجع بهتر عمل میکنند. مجدداً، گروه زمانی بدتر از گروه مرجع برای محرک 4 عمل کرد. گنجاندن این محرک در تجزیه و تحلیل آماری منجر به مقادیر p ناهمگن در آزمونهای اعمال شده میشود که از 0.008 = p (Wilks’ Lambda) تا 0.04 = p (نوع ANOVA) را شامل میشود. تست جایگشت). محدود کردن آزمایش به محرک 2 و 3 منجر به مقدار p ناچیز 0.08 (لمبدا ویلکس) می شود.
آزمایشی از گروههای دو اندازه در محرک 1.1 و 1.2 تفاوت بین متغیرهای مرجع و کلی فضایی را تأیید میکند (هر دو P <0.001). باز هم، یک اثر یادگیری عمومی ممکن است دلیلی برای بهبود نتایج گروه مرجع در نمونه دوم (تغییر و چرخش) این محرک باشد.
3.2. روند جهانی
ما مطالعات تجربی خود را با این فرض آغاز کردیم که تعمیم ارزش با حذف “نویز بصری” از انیمیشنهای نقشه choropleth، تشخیص روندهای کلی باقی مانده را تسهیل میکند. با توجه به نتایج کمی ما ( شکل 9 )، این مورد نیست.
اگرچه مزایای ظاهراً کوچکی برای نوع تعمیم فضایی برای محرک 2، 3 و 4 وجود دارد، تفاوتهای گروهی قابل توجه نیستند. جالب توجه است که یک نتیجه بسیار مهم وجود دارد ( ص= 0.005) به جهت مخالف برای Stimulus 1.1 اشاره می کند. از آنجایی که این اولین محرکی بود که شرکت کنندگان در بخش دوم نظرسنجی در معرض آن قرار گرفتند (پس از یک محرک آزمایشی برای تمرین)، احتمالاً چندین نفر از گروه فضایی از وظیفه تشخیص روند خود توسط عوامل پرت کاملا برجسته در این مورد و به طور غیرارادی منحرف شدند. توجه آنها را به “حالت تشخیص بیرونی” معطوف کردند. عملکرد تقریباً برابر هر دو گروه برای محرک (یکسان) آخرین نظرسنجی (محرک 1.2) و مقداری مشاهده خود هنگام انجام نظرسنجی از این تفسیر پشتیبانی می کند.
3.3. متغیرهای مرتبط با شخص
با توجه به تعداد زیاد شرکت کنندگان و انتساب تصادفی آنها به گروه ها، متغیرهای بالقوه گیج کننده مانند صلاحیت نقشه برداری یا سطح تحصیلات کاملاً به طور مساوی بین گروه ها توزیع می شود. برای آزمایش تأثیر آن متغیرها بر قابلیتهای تشخیص نقاط پرت، با جمع کردن تمام نقاط پرت تشخیص داده شده برای پنج محرک مشاهده شده، یک امتیاز پرت شخصی برای هر شرکتکننده به دست آوردیم. به همین ترتیب، یک امتیاز روند شخصی (مجموع روندهای صحیح) به دست آمد.
برای بررسی اثرات مربوط به سن، ما پنج گروه سنی با فاصله مساوی را که محدوده بین کوچکترین (8 سال) و مسن ترین (76 سال) شرکت کننده را در نظر می گیرند، استخراج کردیم. با استفاده از بسته npmv برای R دوباره، آن گروه ها بر روی تفاوت در امتیازدهی مورد آزمایش قرار گرفتند. هنگام استفاده از هر پنج گروه سنی، تفاوت های بسیار قابل توجهی برای نمرات روند ( 0.006 = p ) وجود دارد که با افزایش سن کاهش می یابد ( شکل 10 ). از آنجایی که بالاترین گروه سنی (62.4 تا 76) نسبتاً کوچک است (7 شرکت کننده)، ما آن را به دلیل مشکلات آماری احتمالی مرتبط با اندازه های گروه بسیار متفاوت حذف کردیم. تفاوت های چهار گروه سنی باقی مانده هنوز بسیار قابل توجه است ( ص= 0.008). نمرات روند با سن با Rho (rs) اسپیرمن 0.14- همبستگی منفی دارد.
همچنین گرایش مشابهی با توجه به امتیازات پرت وجود دارد، اگرچه معنی دار نیست. علاوه بر این، تفاوت معنیداری در امتیازات پرت و گرایش برای جنسیت، تجربه استفاده از نقشه، سطح تحصیلات، تعداد دفعات بازیهای رایانهای، و همچنین برای مشارکتهای داوطلبانه (کارگران جمعیتی) با حقوق دریافت نکردیم.
3.4. اعتماد به نفس
رتبهبندیهای اعتماد به نفس با توانایی واقعی برای تشخیص درست روندها (rs = 0.30) و نقاط پرت (rs = 0.55) همبستگی مثبت دارند. در شرایط اعتماد پایین به انتخاب شخصی، نرخ ضربه 58 درصدی در تشخیص روند بسیار بالا به نظر می رسد ( شکل 11 ). از سوی دیگر، 8 درصد از تصمیمات مطابق با نظر هنوز اشتباه بودند، اگرچه شرکت کنندگان بسیار مطمئن بودند که درست هستند. در مورد تشخیص نقاط پرت، میزان خطاها (برای داشتن هر دو نقطه پرت) در بالاترین درجه اطمینان تا 19 درصد افزایش می یابد ( شکل 12 ). بنابراین، افراد ظاهراً تواناییهای تشخیص بصری خود را بیش از حد برآورد میکنند که توسط لوین و همکارانش توضیح داده شده است. [ 31 ].
3.5. راهبردهای ادراک و به خاطر سپردن
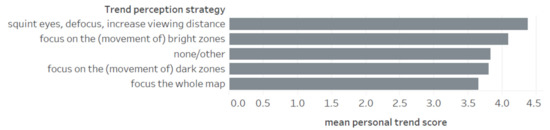
پاسخ های کیفی در مورد استراتژی های تشخیص گرایش های پرت و روند به استراتژی های ادراک و به خاطر سپردن تقسیم شدند و به دسته ها خوشه بندی شدند ( شکل 13 ).
همانطور که میخواستیم اثربخشی استراتژیهای ذکر شده را آزمایش کنیم و در نتیجه برای اندازههای گروهی با قابلیت اطمینان آماری بالاتر تلاش کردیم، دستههای مرتبط مانند «ساخت و حفظ مسیر مجازی» و «پیروی از مسیر مجازی (انگشت، موش)» را بیشتر جمعآوری کردیم یا آنها را حذف کردیم. “سعی کنید پلک نزنید”، “سریع پاسخ دهید”) از تجزیه و تحلیل همانطور که در شکل 13 نشان داده شده است. استراتژیهای تشخیص و به خاطر سپردن موارد پرت به ترتیب برای تفاوت در نمرات پرت شخصی و استراتژیهای مرتبط با روند برای تفاوت در امتیازات روند شخصی مورد آزمایش قرار گرفتند. در حالی که ما تأثیرات قابل توجهی از ادراک/به خاطر سپردن پرت و استراتژی های حفظ روند بر عملکرد کاربر پیدا نکردیم، استراتژی های ادراک روند به نمرات بسیار متفاوتی منجر شدند ( p= 0.016). در میان این استراتژیها، خیره کردن چشمها، عدم تمرکز نقشه، و/یا تکیه دادن به عقب در حین تماشای انیمیشن بهترین کار را داشتند ( شکل 14 ).
3.6. ادراک و ترجیح را توصیف کرد
در مطالعه آزمایشی ما، از شرکتکنندگان خواسته شد که تفاوت بین یک انیمیشن مرجع (“نسخه A”) و همتای عمومی آن (“نسخه B”) را به صورت شفاهی با استفاده از محرک 4 توصیف کنند. و 14% به این سوال باز پاسخ ندادند، تجزیه و تحلیل محتوای توضیحات باقیمانده نشان میدهد که نسخه تعمیمیافته فضایی به صورت همگنتر، روانتر، کمتر شلوغتر و پر سر و صداتر توصیف شده است. علاوه بر این، چندین نفر تاکید کردند که نسخه تعمیم یافته تشخیص یک روند واضح و/یا نقاط پرت محلی آن را تسهیل می کند ( شکل 15 ).
ما متوجه تفاوتهای قابلتوجهی در توانایی فردی برای دیدن و توصیف آگاهانه تفاوتها بین هر دو نسخه شدیم: برخی از شرکتکنندگان این فرض را بهطور شگفتآوری درست پیشنهاد کردند که نسخه B ممکن است یک نسخه کلیسازیشده فضایی از دادههای خام نشاندادهشده در نسخه A باشد، و یکی از آنها حتی به این موارد اشاره کرد. به نظر می رسد از هموارسازی فضایی مستثنی شده است. به نوبه خود، دیگران گزارش دادند که بارها و بارها حلقه انیمیشن را برای چند دقیقه تماشا کرده اند بدون اینکه تفاوتی ببینند. پس از تکمیل نظرسنجی، یکی از اعضای گروه اخیر به ما نزدیک شد و پرسید که آیا تفاوتی وجود دارد یا خیر. پس از توضیح و نشان دادن دوباره حلقه انیمیشن، او از اینکه از قبل تفاوت هایی که به وضوح دیده شده بود را از دست داده بود، شگفت زده شد. با این استدلال که او به جای تصویر کلی به دنبال تغییرات در سطح چند ضلعی های منفرد بوده است،32 ]، ممکن است دلیل سهم 30 درصدی شرکت کنندگانی باشد که هیچ تفاوتی مشاهده نکردند.
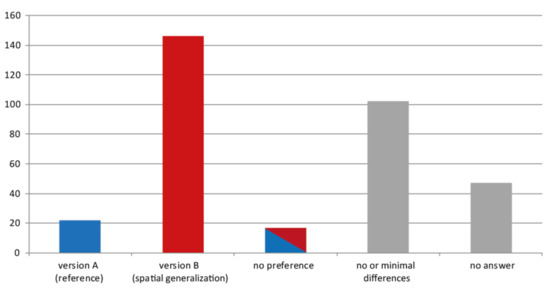
با توجه به سؤال «درک کدام نسخه آسانتر است؟»، شرکتکنندگان در مطالعه آزمایشی به وضوح نسخه کلی فضایی را ترجیح میدهند ( شکل 16).). برای تقویت مشارکت، ما در مورد یک انتخاب انحصاری در این سؤال تصمیم گرفتیم، اما امکان امتناع و ارائه نظرات اضافی را فراهم کردیم. بر اساس آن نظرات، ما دستههای «بدون اولویت» (افرادی که تفاوتها را دیدند، اما هیچکدام از گزینهها را ترجیح ندادند)، «بدون یا حداقل تفاوت» (شرکتکنندگان تفاوتی مشاهده نکردند یا به سختی تفاوتی مشاهده کردند و بنابراین نمیتوانند تصمیم بگیرند) ایجاد کردیم. و “بدون پاسخ” (بدون نظر). در حالی که نظرات معمولی گروه به نفع نسخه تعمیم فضایی، توصیفات شفاهی را از بالا بازنویسی میکنند، گروه «بدون ترجیح» اغلب به شکل «بستگی دارد» پاسخ میدهند و بر اهداف مختلف (نمای کلی در مقابل جزئیات محلی) یک انیمیشن تأکید میکنند.
4. بحث
آزمایشهای ما نشان میدهد که نقطه پرت محلی به استثنای تعمیم نقشههای کروپلث متحرک با همبستگی بسیار بالا، (الف) برای تأکید بر نقاط پرت محلی مؤثر است، و (ب) زمانی که در بعد فضایی انجام شود بهترین عملکرد را دارد. همچنین نشان می دهد که کاربران نقشه انیمیشن های کاهش نویز را ترجیح می دهند. با این وجود، پیشرفتهای مفروض در تشخیص روند توسط دادهها تأیید نمیشوند، اگرچه تقریباً 10 درصد از شرکتکنندگان در مطالعه آزمایشی به صراحت به تسهیل درک شده در این رابطه اشاره میکنند. در حالی که نتایج نشان میدهد که توانایی شخصی برای شناسایی نقاط پرت محلی و روندهای جهانی در انیمیشنهای نقشه مورد استفاده به جنسیت، تجربه نقشهبرداری، تمایل به بازی یا سطح تحصیلات بستگی ندارد، به نظر میرسد که استراتژیهای تشخیص سن و روند نقش مهمی در روند بازی میکنند. تشخیص در ادامه مطلب
4.1. تشخیص بیرونی محلی
تصور میشود که جستجو و توجه به اشیاء از یک صحنه بصری، اثر متقابل فرآیندهای بینایی از پایین به بالا و از بالا به پایین است [ 33 ]. اینکه کدام گروه از فرآیندها غالب است تا حد زیادی به وظیفه واقعی بستگی دارد. کارهایی که به شدت بر اساس دانش قبلی درباره جهان است، مانند جستجوی میز که نیاز به خودکار دارد (به جای جستجوی تصویر بالا، حتی اگر بسیار برجستهتر از میز باشد)، فرآیندهای بالا به پایین در جایی که ما به آن توجه میکنیم غالب خواهد بود. و نگاهمان را معطوف کنیم
برعکس، در کشف ناآگاهانه اطلاعات بصری کاملاً جدید، فرآیندهای از پایین به بالا که ناشی از ناهمگونی میدان بینایی خود هستند، نقش اصلی را ایفا می کنند. مناطقی که به دلیل تفاوت در شدت، رنگ یا جهت ظاهر می شوند، نسبت به مناطقی که کنتراست موضعی کمی دارند، بیشتر به چشم می خورند. شدت موضعی آشکار بودن ادراکی یا به عبارت دیگر، «جاذبه فیزیکی» هر منطقه در میدان دید را می توان با مدل های برجسته بصری که بر اساس دانش عصبی-آناتومیکی و فیزیولوژیکی در مورد سیستم بینایی ما است، توصیف کرد [ 34 ، 35 ]. پیاده سازی چنین مدل هایی [ 36 ، 37 ، 38] نقشه های برجسته صحنه های بصری را تولید می کند و برجستگی بصری ادراک شده اشیاء را در عکس ها، فیلم ها یا حتی نقشه ها به معنای جغرافیایی تخمین می زند [ 39 ، 40 ]. هنگام استفاده از نقشههای برجسته برای پیشبینی نقاط تثبیت چشم و در نتیجه توجه بصری آشکار افراد مورد آزمایش، بهترین پیشبینیها زمانی به دست میآمد که آزمودنیها به صراحت باید به دنبال برجستگی بالا در صحنه بودند، و به دنبال آن وظایف مشاهده آزاد و جستجو برای اشیاء از پیش تعریفشده اما برجسته [ 41 ].]. وظیفه جستجوی ناآگاهانه برای دو نقطه پرت محلی به عنوان ویژگی هایی با بالاترین کنتراست محلی در رنگ/روشنی ممکن است جایی بین جستجوی برجسته مستقیم و جستجوی شی برجسته باشد. بنابراین، ما برجستگی بصری نقاط پرت محلی را برای تشخیص آنها در انیمیشنهای نقشه choropleth تعیینکننده در نظر میگیریم.
برجستگی بصری نه تنها با تفاوت فردی یک شی هدف (در مورد ما یک نقطه پرت محلی) به اشیاء دیگر (چند ضلعی های همسایه) افزایش می یابد، بلکه با همگنی آن اشیاء بالقوه حواس پرتی [ 33 ، 42 ] نیز افزایش می یابد. تغییرات در همگنی حواس پرت کننده بدون تأثیر بر تفاوت حواس پرت کننده-هدف ممکن است در مواردی اتفاق بیفتد که متغیر بصری متفاوتی هدف را از حواس پرت کننده ها جدا می کند. از آنجایی که نقاط پرت موضعی (ما) با چند ضلعی های غیر پرت فقط در میزان کنتراست رنگ/روشنی محلی متفاوت است، هر دو حالت افزایش برجستگی پرت (افزایش اختلاف هدف – حواس پرت کننده، افزایش همگنی حواس پرت کننده) به طور همزمان عمل خواهند کرد، اگر کنتراست موضعی بین حواس پرت کننده ها وجود داشته باشد. کاهش.
در سطح فیزیولوژیکی درک رنگ، کنتراست همزمان نیز باید در نظر گرفته شود. کنتراست همزمان معمولاً به عنوان تغییر روشنایی و رنگ یک جسم به سمت روشنایی و رنگ مکمل ناحیه اطراف نامیده می شود [ 43 ]]، کنتراست رنگ را از نظر ادراکی افزایش می دهد و در نتیجه ترسیم اشیا را تسهیل می کند. اغلب، این با اشاره به ادراکات مختلف از یک رنگ فیزیکی در رنگهای متفاوت و محیطی یکنواخت نشان داده میشود. با استفاده از این مدل ساده کنتراست همزمان، به افزایش ادراکی کنتراست کلی رنگ در محرکهای غیر تعمیمیافته، به جز مناطق نسبتاً یکنواخت، اشاره میکند. بنابراین تقویت ادراکی کنتراست محلی بین همسایگان هموار فضایی کاهش می یابد. با این حال، رنگ درک شده یک نقطه پرت محلی به سختی تحت تأثیر تطابقات رنگی جزئی در بین همسایگان اطراف قرار می گیرد زیرا میانگین رنگ و روشنایی نسبتاً ثابت می ماند. به لطف توصیه یک داور، با کار براون و مکلئود مواجه شدیم [ 44] که نشان می دهد ظاهر رنگ نیز تابعی از واریانس رنگ های اطراف است. رنگها در برابر کنتراست کم نسبت به محیطهای ناهمگن و کنتراست بالا زندهتر به نظر میرسند، حتی اگر میانگینهای فضایی اطراف یکسان باشند. بنابراین، برجستگی نقاط پرت محلی با کلیسازی فضایی همسایگان، به دلیل مکانیسمهای این نوع خاص از کنتراست همزمان، بیشتر میشود.
مطالعات در جستجوی بصری رابطه معکوس برجستگی هدف و زمان جستجوی مورد نیاز را نشان می دهد [ 45 ]. بنابراین، احتمال تشخیص یک نقطه پرت محلی در یک زمان معین (یعنی مدت زمان وجود آن در انیمیشن) با برجستگی آن افزایش می یابد. این کارکرد بالاتر در تشخیص پرت را بر اساس انیمیشنهای نقشه choropleth تعمیمیافته فضایی توضیح میدهد، که با کاهش کنتراست محلی چندضلعیهای حواسپرتی، برجستگی بالاتری را ارائه میدهد.
با این حال، چرا این مکانیسم هنگام کاهش سر و صدای محلی به موقع و در عین حال حفظ تغییرات سبکی زیاد نقاط پرت محلی، به خوبی کار نمی کند؟ تراون و مایرهوفر [ 26] معیارهای مربوط به پیچیدگی نقشه مکانی و زمانی را برای نقشه های سری زمانی طبقه بندی شده choropleth و انواع مکانی، زمانی و مکانی-زمانی تعمیم یافته آنها محاسبه کرد. در حالی که پیچیدگی بصری در بعد (فضا/زمان) مورد استفاده برای هموارسازی داده ها به طرز شگفت انگیزی کاهش یافت، پیچیدگی در بعد استفاده نشده افزایش یافت. آنها فقط برای نوع تعمیمیافته مکانی-زمانی، کاهش (نسبتاً جزئی) در پیچیدگی مکانی و زمانی را گزارش کردند. ضمناً با فرض اینکه پیچیدگی مکانی و زمانی به طور مشابه بر ادراک تأثیر میگذارند، آنها نوع مکانی-زمانی را ترجیح دادند. برخلاف این، نتایج ما نشان میدهد که کاهش پیچیدگی فضایی تأثیر بسیار بیشتری بر توانایی تشخیص نقاط پرت محلی نسبت به کاهش پیچیدگی در زمان دارد.26 ]. به نظر می رسد تعمیم در انتقال های سبکی فردی نسبتاً بی ربط باشد، زیرا ما احتمالاً انیمیشن های نقشه choropleth را به عنوان مجموعه های نامرتبط فضایی از “موقعیت ها” به طور جداگانه در طول زمان در حال تغییر نمی بینیم، بلکه به عنوان یک میدان بصری ذاتاً فضایی و در عین حال به طور پویا در حال تغییر، که از آن می بینیم. به طور ادراکی اشیاء پویا درجه بالاتر (مناطق) را بر اساس تفاوت های کنتراست محلی (به ویژه لبه های کنتراست) در فضا ترسیم کنید. چنین دیدگاهی نه تنها با نظریه شکل گیری شی ادراکی که توسط روانشناسی گشتالت ارائه شده مطابقت دارد [ 46 ]]. همچنین از دیدگاه تکاملی-عملکردی در بینایی در تسهیل تعامل با دنیایی از اشیاء سه بعدی منطقی است. اگرچه برخی از این اشیاء ممکن است ظاهر یا حرکتی را نشان دهند، ساختار سازمانی اولیه آنها مکانی است، نه زمانی. جالب توجه است (یا در نتیجه؟)، معماری عصبی سیستم بینایی ما منعکس کننده طرح فضایی میدان بینایی ما است [ 47 ]]. در طول مراحل پردازش بصری از میدانهای گیرنده شبکیه از طریق هسته ژنیکوله جانبی، قشر بینایی اولیه و چندین ناحیه قشری بعدی که به بینایی اختصاص دارد، آرایش فضایی نورونها آرایش فضایی سلولهای گانگلیونی را در شبکیه حفظ میکند. بنابراین مکان های نزدیک در میدان بینایی ما توسط نورون های نزدیک در تعدادی از نقشه های میدان بینایی در مغز ما پردازش می شوند [ 48 ].
در مطالعه اصلی، به شرکت کنندگان اطلاع داده شد که هر محرک دقیقاً حاوی دو حالت پرت است. با افشای این اطلاعات، ما به نظرات متعددی از مطالعه آزمایشی که در آن شرکتکنندگان در مورد این واقعیت تردید داشتند، واکنش نشان دادیم. در حالی که بسیاری از آنها از دشواری کلی این کار شکایت داشتند، برخی دیگر به طور ضمنی نشان دادند که پس از کار بر روی محرکهای اول، تصور میکردند که دو حالت پرت پیدا کنند. بنابراین، تصمیم گرفتیم این سطح پیچیدگی اضافی را در مطالعه اصلی حذف کنیم. علیرغم این تغییرات و سایر تغییرات در طراحی مطالعه نهایی، نتایج مطالعه مقدماتی شباهت زیادی به الگوهای مشاهده شده در مطالعه اصلی برای نقاط پرت صحیح و مثبت کاذب دارد (بهترین عملکرد نوع تعمیم فضایی،
4.2. تشخیص روند جهانی
تغییر در روند جهانی انیمیشنهای نقشه کروپلث با همبستگی بسیار مکانی و زمانی به عنوان حرکت درک میشود. تصور یک “جبهه متحرک”، “گسترش مناطق با ارزش بالا” یا “حرکت خوشه ای از مقادیر کم” ریشه در اتصال منتقل شده توسط مرزهای پیوسته دارد [ 23 ]] و سبکی کلی به تدریج در حال تغییر در فضا و زمان. همانطور که ما مناطقی با سبکی مشابه با اشکال ادراکی با مرزهایی که با گرادیان های رنگی تندتر تعریف شده اند جذب می کنیم، فرآیند فضایی زمینه ای – مانند شیوع یک بیماری عفونی که با افزایش نرخ بروز محلی بیان می شود – منجر به تصور حرکت مرزی می شود (به عنوان مثال، حرکت جبهه اپیدمی)، اگرچه فقط سبکی چند ضلعی های منفرد به طور هماهنگ تغییر می کند. بسته به جهت حرکت درک شده تمام مرزهای آن، شکل محدود عملاً رشد می کند، کوچک می شود یا حرکت می کند. در مقایسه، نمادهای جدا شده از یک نقشه نمادهای متناسب متحرک چنین درک قوی از “حرکت زیربنایی” را ارائه نمی دهند [ 23 ]]، و همچنین از انیمیشنهای نقشه choropleth دادهها با همبستگی خودکار کمی در مکان یا زمان حاصل نمیشود. در مورد دوم، فرآیند زیربنایی یا مقیاس انتخابی تجمع به سادگی انسجام بسیار کمی را در تغییرات سبکی فردی ایجاد میکند، که منجر به افزایش تعداد چهرههای ظاهر شده و ناپدید میشود و به سرعت از ظرفیتهای شناختی ما فراتر میرود.
یکی دیگر از عوامل مهم برای حرکت ظاهری، سرعت انیمیشن است. گریفین و همکاران در مطالعه تطبیقی خود در مورد تشخیص خوشههای فضا-زمان در مضرب کوچک و نقشههای متحرک. [ 49 ] دریافتند که حرکت ظاهری و در نتیجه میزان تشخیص خوشهها ارتباط نزدیکی با سرعت انیمیشن دارد. آنها به طور قابل قبولی فرض می کنند که اگر انیمیشن خیلی کند باشد، اگر انیمیشن خیلی کند باشد، اصل گروه بندی گشتالت سرنوشت مشترک [ 46 ] نمی تواند توسط سیستم بصری ما ایجاد شود، در حالی که پردازش شناختی نمی تواند ادامه یابد، اگر خیلی سریع باشد. در حالی که سرعت انیمیشن را در آزمایش خود تغییر ندادیم، نرخ کلی تشخیص روند جهانی نسبتاً بالا بود ( شکل 9). بنابراین، فرض میکنیم که سرعت انیمیشن در محدوده مناسبی برای تشخیص حرکت ظاهری است.
در آزمایش ما، تعمیم به طور قابلتوجهی توانایی شرکتکنندگان را برای اختصاص دادن نامزد صحیح روند مبهم به محرک مربوطه بهبود نمیبخشد، اگرچه 11 درصد از شرکتکنندگان بر روندی ذهنی برای پیگیری آسانتر در انیمیشن تعمیمیافته فضایی در مطالعه آزمایشی تأکید کردند.
یک توضیح احتمالی برای نتایج کمی منفی در رابطه با فرضیه ما مبنی بر اینکه همگنی محلی بهبود یافته درک روند را بهبود می بخشد، توانایی انسان برای توجه به فرکانس های فضایی متمایز و فیلتر موثر نویز بصری در سطوح فرکانس فضایی است که مورد توجه قرار نمی گیرد [ 50 ، 51 ]. به گفته اسنودن، تامپسون و تروسیانکو [ 47 ]، خیره نگه داشتن چشم ها یا افزایش فاصله دید، درک فرکانس های فضایی پایین را تسهیل می کند. بنابراین، جای تعجب نیست که اتخاذ شهودی دقیقاً این استراتژی ها به طور قابل توجهی درک روند را تسهیل می کند. عملکرد برتر گروه با تمرکز بر مناطق روشن نسبت به پیروان مناطق تاریک با ادبیات همخوانی دارد. ناثدرفت [52 ] دریافتند که اهداف روشن در میان اهداف تاریک برجسته تر از بالعکس هستند.
مشخص شد که تواناییهای تشخیص روند در انیمیشنهای نقشه choropleth با افزایش سن کاهش مییابد. اگرچه کاهش متوسط است، اما بسیار قابل توجه است. با توجه به تغییرات کلی ادراکی و شناختی در طول عمر انسان، این نتیجه تعجب آور نیست. از منظر روانی فیزیولوژیکی، تشخیص روند عمومی در درجه اول با درک انسجام حرکت و حرکت انتقالی مرتبط به نظر می رسد (برخلاف جریان شعاعی که هنگام حرکت در محیط یا حرکت بیولوژیکی تجربه می کنیم، ناشی از حرکات بدن فیگورهای انسانی). هر دو حالت ادراک حرکت با افزایش سن کاهش می یابد [ 53 ، 54 ]، بنابراین یافته های ما با ادبیات مربوطه مطابقت دارد.
5. نتیجه گیری و چشم انداز
نتیجه میگیریم که تعمیم ارزش حفظ پرت در فضا، شناسایی نقاط پرت محلی را در انیمیشنهای نقشه choropleth تسهیل میکند، در حالی که ما نتوانستیم چنین تأثیری را برای تعمیم در زمان پیدا کنیم.
نتایج منفی کلی ما در مورد سود هموارسازی زمانی انیمیشنهای نقشه کروپلث، یافتههای مشابه مککیب [ 23 ] برای کارهای مختلف استفاده از نقشه را تکمیل میکند. او نیز مانند ما از نقشه های choropleth طبقه بندی نشده برای آزمایش خود استفاده کرد. اگر انتقال این یافته ها به انیمیشن نقشه choropleth طبقه بندی شده برقرار باشد، معیارهای پیچیدگی مطابق که توسط Goldsberry و Battersby معرفی شده اند [ 2] نیاز به بازاندیشی دارد، زیرا آنها صرفاً به تغییرات (کلاس) چند ضلعی های فردی در زمان بستگی دارند. از آنجایی که به نظر نمیرسد کاهش پیچیدگی زمانی ادراک را بهبود بخشد، این سوال مطرح میشود که آیا معیارهای پیچیدگی زمانی صرفاً یک پروکسی مفید برای پیچیدگی درک شده نقشههای کروپلث متحرک هستند یا خیر. شاخصهای مبتنی بر “اشیاء ادراک” ترکیبی که مستقیماً از دادههای مکانی-زمانی یا از خروجی مدلهای برجسته پویا [ 55 ] تقسیمبندی شدهاند، ممکن است اولین گام به سمت توصیف مناسبتر پیچیدگی نقشه متحرک باشد. توسعه الگوریتمها و ابزارهای مطابق برای تخمین قابلیت درک نقشههای متحرک choropleth فضای زیادی را برای تحقیقات آینده فراهم میکند.
در مطالعه خود که در بالا ذکر شد، گریفین، مک اچرن، هاردیستی، اشتاینر و لی [ 49 ]] متوجه شد که سرعت انیمیشن بهینه برای تشخیص حرکت ظاهری برای شدت های مختلف خوشه متفاوت است. این به وضوح کنترل تعاملی سرعت انیمیشن توسط کاربر را تحریک می کند، اما همچنین نشان می دهد که گروه بندی ادراکی بر اساس سرنوشت مشترک در مورد سرعت انیمیشن چقدر حساس است. روابط پیچیده بین سرعت انیمیشن و درجات مختلف خودهمبستگی مکانی و زمانی بر روی درک حرکت ظاهری در نقشههای کروپلث متحرک هنوز در انتظار کشف کامل است. در حالی که ما شواهدی برای مزایای تعمیم ارزش برای تشخیص روند جهانی پیدا نکردیم، نمی توان رد کرد که این موضوع در شرایطی که حرکت ظاهری به دلیل شرایط نویزتر، تغییرات رنگ “هماهنگ” کمتر یا به دلیل سرعت غیربهینه انیمیشن سخت تر است، برای تشخیص یک فرآیند فضایی خاص صادق است.
منابع
- هاروور، ام. محدودیت های شناختی نقشه های متحرک. Cartographica 2007 , 42 , 349-357. [ Google Scholar ] [ CrossRef ]
- گلدزبری، ک. Battersby, S. Issues of Change Detection in Animated Choropleth Maps. کارتوگر. بین المللی جی. جئوگر. Inf. جئوویس. 2009 ، 44 ، 201-215. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دوبوا، ام. Battersby، SE یک مدل همسایگی مبتنی بر شطرنجی برای ارزیابی پیچیدگی در نقشههای پویا. در مجموعه مقالات AutoCarto 2012، کلمبوس، OH، ایالات متحده آمریکا، 16-18 سپتامبر 2012. [ Google Scholar ]
- روزنهولتز، R. قابلیت ها و محدودیت های دید محیطی. آنو. کشیش ویس. علمی 2016 ، 2 ، 437-457. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Sweller, J. بار شناختی در حین حل مسئله: تأثیرات بر یادگیری. شناخت. علمی 1988 ، 12 ، 257-285. [ Google Scholar ] [ CrossRef ]
- سولر، جی. ون مرینبور، جی جی. Paas, F. معماری شناختی و طراحی آموزشی: 20 سال بعد. آموزش. روانی Rev. 2019 , 31 , 1–32. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شانس، SJ; Vogel، EK ظرفیت حافظه کاری بصری برای ویژگی ها و حروف ربط. طبیعت 1997 ، 390 ، 279-281. [ Google Scholar ] [ CrossRef ]
- Metaferia، MT تقویت بصری سری های زمانی متحرک برای کاهش تغییر نابینایی. پایان نامه کارشناسی ارشد، دانشگاه Twente، Enschede، هلند، 2011. [ Google Scholar ]
- هاروور، ام. فابریکانت، SI نقش انیمیشن نقشه برای تجسم جغرافیایی. در تجسم جغرافیایی. مفاهیم، ابزارها و کاربردها ؛ Dodge, M., Derby, MM, Turner, M., Eds. جان وایلی و پسران: چیچستر، انگلستان، 2008; صص 49-65. [ Google Scholar ]
- هاروور، ام. نکاتی برای طراحی نقشه های متحرک موثر. کارتوگر. چشم انداز 2003 ، 63-65. [ Google Scholar ] [ CrossRef ]
- کراک، ام.-جی. ادسال، آر. MacEachren، AM انیمیشن کارتوگرافی و افسانه ها برای نقشه های زمانی: کاوش و یا تعامل. در مجموعه مقالات هجدهمین کنفرانس بین المللی کارتوگرافی، استکهلم، سوئد، 23-27 ژوئن 1997; صص 253-261. [ Google Scholar ]
- Midtbø، T. افسانه های پیشرفته برای نقشه های پویا تعاملی. در مجموعه مقالات بیست و سومین کنفرانس بین المللی کارتوگرافی «کارتوگرافی برای همه و برای شما»، مسکو، روسیه، 4 تا 10 اوت 2007; صص 4-10. [ Google Scholar ]
- Muehlenhaus, I. نقشهبرداری وب: طراحی نقشه برای دستگاههای تعاملی و موبایلی . CRC Press: Boca Raton، FL، USA، 2013. [ Google Scholar ]
- اوپاچ، ت. گولوبیوفسکا، آی. Fabrikant، SI چگونه مردم نقشه های متحرک چند جزئی را مشاهده می کنند؟ کارتوگر. J. 2014 ، 51 ، 330-342. [ Google Scholar ] [ CrossRef ]
- ماهی، سی. گلدزبری، KP; Battersby، S. تغییر نابینایی در نقشه های متحرک choropleth: یک مطالعه تجربی. کارتوگر. Geogr. Inf. علمی 2011 ، 38 ، 350-362. [ Google Scholar ] [ CrossRef ]
- Battersby، SE; ملاحظات گلدزبری، KP در طراحی رفتارهای گذار برای نقشه های موضوعی پویا. کارتوگر. چشم انداز 2010 ، 16-32. [ Google Scholar ] [ CrossRef ]
- سیبولسکی، پ. Medyńska-Gulij، B. افزونگی نقشه برداری در کاهش کوری تغییر در تشخیص مقادیر شدید در نقشه های مکانی-زمانی. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 8. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مولتی ماکی، اس. Ahonen-Rainio، P. انیمیشن نقشه زمانی تغییر یافته برای تجزیه و تحلیل داده های بصری. در مجموعه مقالات پردازش GEO 2015: هفتمین کنفرانس بین المللی سیستم های اطلاعات جغرافیایی پیشرفته، برنامه ها و خدمات، لیسبون پرتغال، 22 تا 27 فوریه 2015. صص 25-31. [ Google Scholar ]
- Monmonier، M. دستههای حداقل تغییر برای نقشههای choropleth زمانی پویا. J. Pa. Acad. علمی 1994 ، 68 ، 42-47. [ Google Scholar ]
- Monmonier، M. تعمیم زمانی برای نقشه های پویا. کارتوگر. Geogr. Inf. سیستم 1996 ، 23 ، 96-98. [ Google Scholar ] [ CrossRef ]
- هاروور، ام. تجسم تغییر: استفاده از انیمیشن کارتوگرافی برای کاوش داده های سنجش از راه دور. کارتوگر. چشم انداز 2001 ، 30-42. [ Google Scholar ] [ CrossRef ]
- Harrower, M. نقشه های متحرک طبقه بندی نشده choropleth. کارتوگر. J. 2007 , 44 , 313-320. [ Google Scholar ] [ CrossRef ]
- McCabe، CA اثرات پیچیدگی داده و انتزاع نقشه بر درک الگوها در انیمیشن های بیماری عفونی. پایان نامه کارشناسی ارشد، دانشگاه ایالتی پنسیلوانیا، پارک دانشگاه، PA، ایالات متحده آمریکا، 2009. [ Google Scholar ]
- Ogao، PJ؛ Kraak، MJ تعریف عملیات تجسم برای طراحی انیمیشن کارتوگرافی زمانی. بین المللی J. Appl. زمین Obs. Geoinf. 2002 ، 4 ، 23-31. [ Google Scholar ] [ CrossRef ]
- اسلوکام، TA; اسلاتر، آر اس، جونیور؛ کسلر، اف سی؛ Yoder، SC یک ارزیابی کیفی MapTime، برنامه ای برای کاوش داده های نقطه ای مکانی-زمانی. Cartographica 2004 ، 39 ، 43-68. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تراون، سی. Mayrhofer, C. کاهش پیچیدگی در انیمیشنهای نقشه کروپلث با تعمیم وزنی همبستگی خودکار دادههای سری زمانی. کارتوگر. Geogr. Inf. علمی 2018 ، 45 ، 221-237. [ Google Scholar ] [ CrossRef ]
- موران، یادداشت PAP در مورد پدیده های تصادفی پیوسته. Biometrika 1950 ، 37 ، 17-23. [ Google Scholar ] [ CrossRef ]
- کرامپ، MJC؛ مک دانل، JV; گورکیس، TM ارزیابی ترک مکانیکی آمازون به عنوان ابزاری برای تحقیقات رفتاری تجربی. PLoS ONE 2013 ، 8 ، e57410. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تیم، RC R: زبان و محیطی برای محاسبات آماری . بنیاد R برای محاسبات آماری: وین، اتریش، 2021. [ Google Scholar ]
- الیس، آر. بورشت، دبلیو دبلیو; هرار، SW; Bathke، استنتاج ناپارامتری AC برای داده های چند متغیره: بسته R npmv. J. Stat. نرم افزار 2017 ، 76 ، 1-18. [ Google Scholar ]
- لوین، دی.تی. مومن، ن. Drivdahl، SB; Simons، DJ Change Blindness Blindness: Error Metacognitive of Overestimating Change-detection Error. Vis. شناخت. 2000 ، 7 ، 397-412. [ Google Scholar ] [ CrossRef ]
- سیمونز، دی جی ضبط توجه و کوری بی توجه. روندهای شناختی. علمی 2000 ، 4 ، 147-155. [ Google Scholar ] [ CrossRef ]
- ولف، جی.ام. هوروویتز، تی اس پنج عاملی که توجه را در جستجوی بصری هدایت می کند. نات هوم رفتار 2017 ، 1 ، 0058. [ Google Scholar ] [ CrossRef ]
- کوچ، سی. اولمن، اس. تغییر در توجه بصری انتخابی: به سمت مدار عصبی زیرین. هوم نوروبیول. 1985 ، 4 ، 219-227. [ Google Scholar ] [ PubMed ]
- ویل، ر. حافد، ز.م. یوشیدا، ام. برجستگی بصری در مغز چگونه محاسبه می شود؟ بینشهایی از رفتار، زیستشناسی عصبی و مدلسازی. فیلوس ترانس. R. Soc. B Biol. علمی 2017 ، 372 ، 20160113. [ Google Scholar ] [ CrossRef ]
- بروس، ND; Tsotsos، JK Saliency، توجه و جستجوی بصری: یک رویکرد نظری اطلاعات. J. Vis. 2009 ، 9 ، 5. [ Google Scholar ] [ CrossRef ]
- ایتتی، ال. کوچ، سی. Niebur, E. مدلی از توجه بصری مبتنی بر برجسته بودن برای تجزیه و تحلیل صحنه سریع. IEEE Trans. الگوی مقعدی ماخ هوشمند 1998 ، 20 ، 1254-1259. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ال. تانگ، MH؛ مارکز، TK; شان، اچ. کاترل، GW SUN: چارچوب بیزی برای برجستگی با استفاده از آمار طبیعی. J. Vis. 2008 ، 8 ، 32. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دیویس، سی. فابریکانت، SI; هگارتی، M. به سمت نمایش های کارتوگرافی تایید شده تجربی. در کتاب راهنمای تحقیقات ادراک کاربردی کمبریج ; Szalma، JL، Scerbo، MW، Hancock، PA، Parasuraman، R.، Hoffman، RR، Eds. انتشارات دانشگاه کمبریج: کمبریج، انگلستان، 2015; ص 711-730. [ Google Scholar ]
- فابریکانت، SI; Goldsberry، K. ارتباط موضوعی و برجستگی ادراکی نمایشگرهای ژئوویژوالیشن پویا. در مجموعه مقالات بیست و دومین کنفرانس بین المللی کارتوگرافی ICA/ACI، A Coruña، اسپانیا، 9 تا 16 ژوئیه 2005. [ Google Scholar ]
- کوهلر، ک. گوا، اف. ژانگ، اس. Eckstein، MP مدل های برجسته چه چیزی را پیش بینی می کنند؟ J. Vis. 2014 ، 14 ، 14. [ Google Scholar ] [ CrossRef ]
- Yantis, S. چگونه برجستگی بصری در نبرد برای آگاهی پیروز می شود. نات نوروسک. 2005 ، 8 ، 975-977. [ Google Scholar ] [ CrossRef ]
- اسلوکام، TA; مک مستر، آر.بی. کسلر، اف سی؛ هاوارد، کارتوگرافی موضوعی و ژئوویژوالیشن HH ، ویرایش سوم. Pearson Prentice Hall: Upper Saddle River، نیوجرسی، ایالات متحده آمریکا، 2009. [ Google Scholar ]
- براون، RO; ظاهر رنگ MacLeod، DI به تنوع رنگهای محیطی بستگی دارد. Curr. Biol. 1997 ، 7 ، 844-849. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیزفلد، منابع انسانی؛ موران، آر. آشر، ام. مولر، اچ جی; Zehetleitner، M. کارایی جستجو به عنوان تابعی از برجسته بودن هدف: گذار از جستجوی ناکارآمد به جستجوی کارآمد و فراتر از آن. J. Exp. روانی درک انسان. انجام دادن. 2016 ، 42 ، 821. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Wagemans، J.; Elder, JH; کوبوی، ام. پالمر، SE; پترسون، MA; سینگ، ام. فون در هایت، R. یک قرن روانشناسی گشتالت در ادراک بصری: I. گروه بندی ادراکی و سازماندهی شکل-زمین. روانی گاو نر 2012 ، 138 ، 1172-1217. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اسنودن، آر. تامپسون، پی. Troscianko، T. چشم انداز اساسی: مقدمه ای بر ادراک بصری . انتشارات دانشگاه آکسفورد: آکسفورد، انگلستان، 2012. [ Google Scholar ]
- واندل، کارشناسی; دومولن، SO; Brewer، AA نقشه های میدان بصری در قشر انسان. Neuron 2007 ، 56 ، 366-383. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گریفین، آل. MacEachren، AM; هاردیستی، اف. اشتاینر، ای. لی، بی. مقایسه نقشههای متحرک با نقشههای کوچک چندگانه ثابت برای شناسایی بصری خوشههای فضا-زمان. ان دانشیار صبح. Geogr. 2006 ، 96 ، 740-753. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شولمن، جی ال. سالیوان، MA; گیش، ک. ساکودا، WJ نقش کانال های فضایی فرکانس در درک ساختار محلی و جهانی. ادراک 1986 ، 15 ، 259-273. [ Google Scholar ] [ CrossRef ]
- Sowden، PT; Schyns، PG کانال گشت و گذار در مغز بینایی. روندهای شناختی. علمی 2006 ، 10 ، 538-545. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Nothdurft، H.-C. توجه به اهداف برجسته تغییر می کند. Vis. Res. 2002 ، 42 ، 1287-1306. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بیلینو، جی. برمر، اف. Gegenfurtner، KR پیری افتراقی مکانیسمهای پردازش حرکت: شواهدی در برابر کاهش ادراکی عمومی. Vis. Res. 2008 ، 48 ، 1254-1261. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اسنودن، آر جی؛ کاوانا، ای. ادراک حرکت در سیستم بصری پیری: آستانههای تمایز حداقل حرکت، هماهنگی حرکت و سرعت. ادراک 2006 ، 35 ، 9-24. [ Google Scholar ] [ CrossRef ]
- باک، سی. کوچاک، ع. اردم، ای. Erdem، A. شبکه های برجستگی مکانی-زمانی برای پیش بینی برجستگی پویا. IEEE Trans. چند رسانه ای 2018 ، 20 ، 1688-1698. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
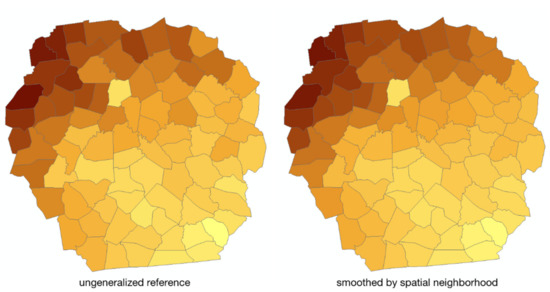
شکل 1. کمی کنتراست موضعی در نسخه تعمیم یافته فضایی ( راست ) یک فریم از محرک 1 کاهش یافته است. رنگ یک چند ضلعی پرت محلی (چند ضلعی روشن در مرکز بالایی) با تعمیم ( چپ ) تغییر نمی کند.
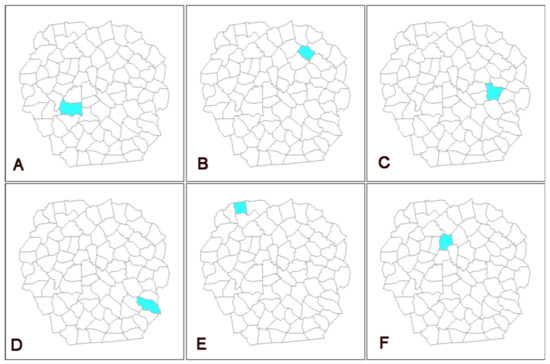
شکل 2. موارد پاسخ پرت محلی برای محرک 1. شرکت کنندگان می توانستند بین شش نامزد پرت انتخاب کنند ( A – F ). گزینه F نقطه پرت محلی را از شکل 1 نشان می دهد .
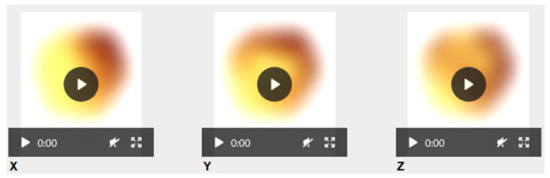
شکل 3. انیمیشن های مورد پاسخ روند جهانی. به عنوان شش آیتم پاسخ پرت محلی در بخش اول آزمایش، سه آیتم پاسخ روند بلافاصله جایگزین محرک مشاهده شده در بخش دوم مطالعه می شوند.
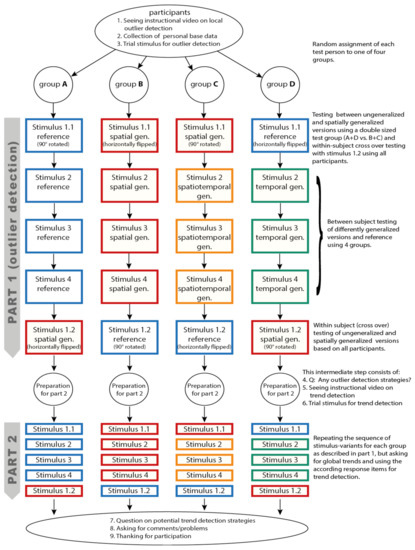
شکل 4. طراحی مطالعه.
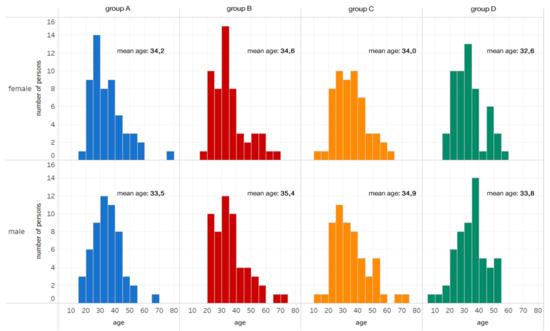
شکل 5. توزیع سنی بر اساس جنس و گروه.
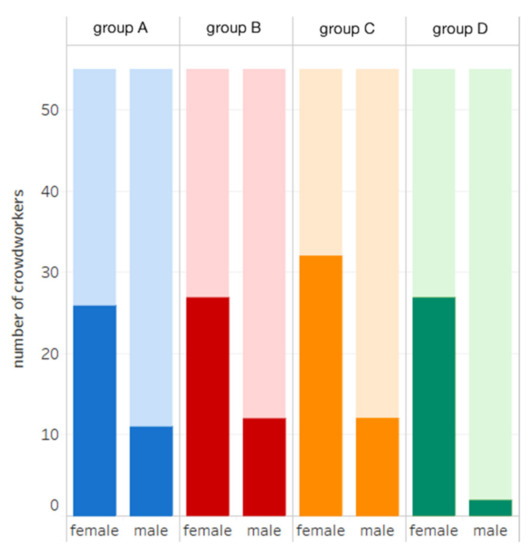
شکل 6. نوارهای اشباع شده تعداد پاسخ های کارگر (33.4 درصد از کل) را بر اساس جنسیت و گروه نشان می دهد. با نسبت سایر شرکتکنندگان که با میلههای نور نشان داده شدهاند مقایسه کنید.
شکل 7. تعداد افراد در هر گروه/نوع تعمیم برای تشخیص صحیح هیچ، یک یا هر دو نقطه پرت محلی در هر محرک.
شکل 8. تعداد افراد در هر گروه/نوع تعمیم برای انتخاب اشتباه هیچ، یک یا دو نامزد پرت اشتباه (“مثبت نادرست”).
شکل 9. تعداد افراد در هر گروه/نوع تعمیم که آیتم پاسخ روند صحیح را انتخاب کرده اند.
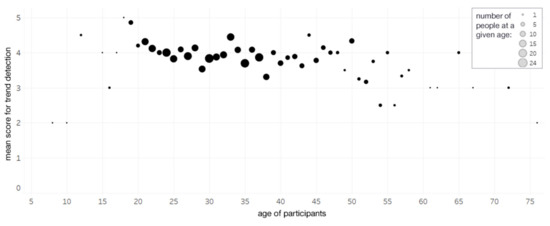
شکل 10. نمرات روند با افزایش سن کاهش می یابد. نمرات روند شخصی بر اساس همه محرک ها است و با 0 (همه روندها نادرست) و +5 (همه روندها به درستی شناسایی شده اند) محدود می شود. شرکت کنندگان هم سن با یک نقطه نشان داده می شوند.
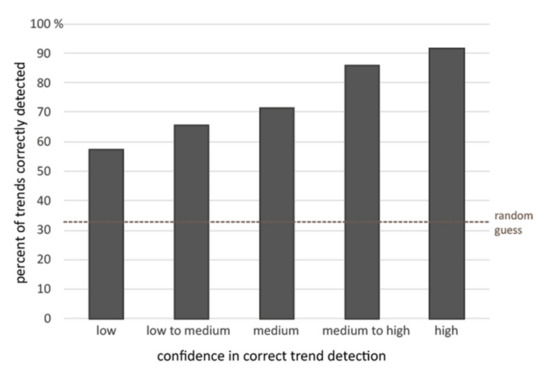
شکل 11. نرخ ضربه برای سطوح مختلف اطمینان در تشخیص صحیح روند.
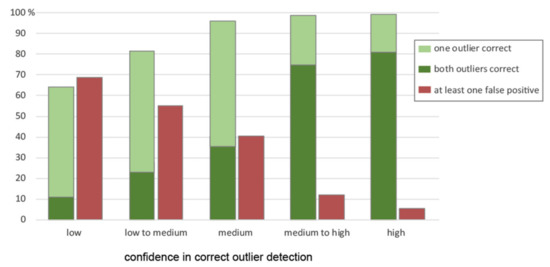
شکل 12. نرخ ضربه و هشدارهای نادرست برای سطوح مختلف اطمینان در تشخیص صحیح نقاط پرت.

شکل 13. راهبردهای تشخیص و به خاطر سپردن موارد پرت و روند.
شکل 14. عملکرد استراتژی ها برای درک روند.
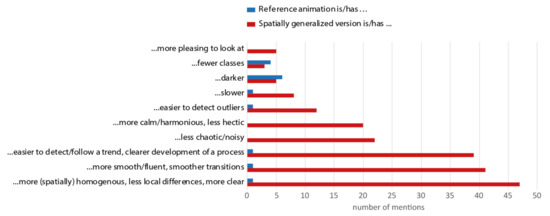
شکل 15. تعداد ذکرهای مقایسهای در توصیفهای کلامی تفاوتهای بین انیمیشن مرجع و همتای تعمیمیافته فضایی آن از محرک 4. طبقهبندی از نظر معنایی انجام شد، بهعنوان مثال، «نسخه A آشفتهتر از نسخه B است» به عنوان «نسخه تعمیمیافته فضایی» طبقهبندی میشود. ب) آشفتگی کمتری دارد». علاوه بر این 217 عبارت مقایسه ای، 25 عبارت مانند “در نسخه B به نظر می رسد زرد روشن بیشتر به سمت شمال حرکت می کند” را نمی توان به صورت مقایسه ای نسبت داد و حذف شد.
شکل 16. پاسخ های “درک کدام نسخه راحت تر است؟” تعداد مطلق، n = 334.


بدون دیدگاه