

حفاظت و مدیریت دریایی نیاز به نقشه برداری دقیق و دقیق زیستگاه دارد که معمولاً با جمع آوری داده ها با استفاده از روش های سنجش از دور تولید می شود. در سالهای اخیر، سیستمهای هوایی بدون سرنشین (UAS) برای جمعآوری دادههای دریایی استفاده میشوند، زیرا اطلاعات دقیق و قابل اعتمادی را از طریق نقشههای ارتوفوتو با وضوح بسیار بالا ارائه میدهند. با این حال، مانند تمام داده های سنجش از دور، مطالعه و درک دقت و قابلیت اطمینان نقشه های تولید شده مهم است. در این مطالعه، تأثیر شرایط مختلف محیطی بر کیفیت نقشههای ارتوفوتو UAS از طریق ارزیابی دقت موقعیتی و موضوعی مورد بررسی قرار گرفت. اشیاء منتخب روی نقشههای ارتوفتو نیز از نظر موقعیت، شکل و وسعت مورد ارزیابی قرار گرفتند. نتایج ارزیابی دقت خطاهای قابل توجهی را در نقشه ها و اشیاء مختلف نشان داد. دقت تصاویر طبقه بندی شده بین 2.1% و 27% متغیر بود. علفهای دریایی کمتر طبقهبندی میشدند، در حالی که کلاس بستر مخلوط زمانی که شرایط محیطی بهینه نبود، بیش از حد طبقهبندی شد. بیشترین طبقه بندی اشتباه به دلیل وجود نور خورشید در ترکیب با سطح دریا ناهموار بود. یک گردش کار تشخیص تغییر منجر به شناسایی طبقهبندیهای اشتباه تا 45 درصد در نقشههای ارتوفوتو که در شرایط محیطی غیربهینه ایجاد شده بودند، شد. نتایج اهمیت شرایط بهینه برای کسب اطلاعات دریایی قابل اعتماد با استفاده از UAS را تایید کرد. بیشترین طبقه بندی اشتباه به دلیل وجود نور خورشید در ترکیب با سطح دریا ناهموار بود. یک گردش کار تشخیص تغییر منجر به شناسایی طبقهبندیهای اشتباه تا 45 درصد در نقشههای ارتوفوتو که در شرایط محیطی غیربهینه ایجاد شده بودند، شد. نتایج اهمیت شرایط بهینه برای کسب اطلاعات دریایی قابل اعتماد با استفاده از UAS را تایید کرد. بیشترین طبقه بندی اشتباه به دلیل وجود نور خورشید در ترکیب با سطح دریا ناهموار بود. یک گردش کار تشخیص تغییر منجر به شناسایی طبقهبندیهای اشتباه تا 45 درصد در نقشههای ارتوفوتو که در شرایط محیطی غیربهینه ایجاد شده بودند، شد. نتایج اهمیت شرایط بهینه برای کسب اطلاعات دریایی قابل اعتماد با استفاده از UAS را تایید کرد.
کلید واژه ها:
UAS ; تصاویر UAS ; دقت طبقه بندی ; ارزیابی دقت ; تشخیص تغییر ؛ سنجش از دور
1. مقدمه
نقشه برداری و پایش زیستگاه های دریایی برای مدیریت حفاظت، حفاظت از زیستگاه های دریایی و ارزیابی وضعیت زیست محیطی اکوسیستم های دریایی ضروری است [ 1 ]. اطلاعات دریایی معمولاً با اندازهگیریهای درجا در مقیاسهای کوچک و با تصاویر ماهوارهای با وضوح متوسط [ 2 ، 3 ، 4 ] تا تصاویر ماهوارهای با وضوح بالا [ 5 ، 6 ، 7 ] یا هواپیماهای سرنشین دار [ 8 ] در مقیاسهای متوسط تا بزرگ به دست میآیند. [ 9 ]. وضوح مکانی 10-100 متر اغلب برای نقشه برداری مناسب است در حالی که وضوح فضایی کوچکتر از 10 متر به طور فزاینده ای برای کاربردهای ساحلی استفاده می شود.9 ]. اگرچه تعداد زیادی از سنسورهای ماهوارهای وجود دارند که وضوحهای متفاوتی را ارائه میدهند، این روشها اغلب گران هستند، در فواصل زمانی منظم در دسترس نیستند، و از نظر میزان و سطح جزئیات انعطافپذیر نیستند [ 10 ، 11 ، 12 ، 13 ]. داده های ماهواره ای و تصاویر دیجیتالی هوابرد (به عنوان مثال، Compact airborne spectrographic imager-CASI) اجازه می دهد تا مکان و وسعت بسترهای علف های دریایی زمانی که یک ناحیه پیوسته از علف های دریایی با بسترهای با متراکم بالا وجود دارد، نقشه برداری شود [ 9 ]. با این حال، داده های با وضوح بالا اغلب برای تشخیص ویژگی های دریایی کوچک، تمایز گونه های دریایی و تشخیص تغییرات زیستگاه دریایی مورد نیاز است.
در سال های اخیر، سیستم های هوایی بدون سرنشین (UAS) به طور گسترده ای به عنوان یک ابزار سنجش از دور دور نزدیک [ 14 ] برای نقشه برداری و نظارت بر محیط ساحلی و دریایی [ 11 ، 13 ، 15 ، 16 ، 17 ]، تشخیص زباله های دریایی [ 14] استفاده می شود. 18 ، 19 ] و ارزیابی فرسایش ساحلی [ 20 ، 21]. استفاده از UAS به طور مداوم در حال افزایش است زیرا آنها تصاویری با وضوح بسیار بالا را از طریق نقشه های ارتوفوتو و مدل های سه بعدی دقیق ارائه می دهند. توانایی آنها برای پرواز در ارتفاعات پایین به کاربران اجازه می دهد تا وضوح و سطح جزئیات داده های به دست آمده را تعریف کنند، چیزی که با سایر روش های سنجش از راه دور قابل دستیابی نیست.
اگرچه UAS کاربردهای بالقوه بسیاری در کاربردهای دریایی دارد، برخی محدودیتها باید برای نقشهبرداری دقیق و قابل اعتماد زیستگاه دریایی [ 10 ، 22 ]، که عمدتاً به شرایط محیطی (مانند باد، کدورت آب، نور خورشید) و پارامترهای پرواز UAS مربوط میشود، برطرف شود. به عنوان مثال، نوع هواپیما و محموله). این محدودیت ها در چندین مطالعه گزارش شده است [ 8 ، 23 ، 24 ] و به طور گسترده در یک پروتکل جمع آوری داده UAS تجزیه و تحلیل شده است [ 25 ]]. برای مثال، امواج و نور خورشید معمولاً بر کیفیت دادههای بهدستآمده تأثیر میگذارند، زیرا بهطور برجسته در سطح دریا قابل مشاهده هستند. امواج ناشی از سرعت بالای باد در ترکیب با حضور نور خورشید مانع از دید بستر دریا می شود. برای جلوگیری از نور خورشید، زمان پرواز UAS باید به ساعات اولیه صبح و بعد از ظهر محدود شود [ 21 ، 24 ، 26 ].
کیفیت نقشههای ارتوفتو با وضوح بالا تولید شده توسط دادههای UAS مستقیماً تحت تأثیر شرایط محیطی حاکم بر منطقه در طول اکتساب دادهها قرار میگیرد. اگرچه اطلاعات به دست آمده از نقشه های ارتوفتو بسیار دقیق و مفید است، ارزیابی کیفیت آنها و شناسایی منابع خطاها مهم است [ 27 ]. بسیاری از روش ها بر ارزیابی دقت نقشه های مشتق شده از راه دور تمرکز دارند. این روش ها هم به دقت موقعیتی و هم به دقت موضوعی اشاره دارند و به داده های مرجع نیاز دارند [ 28 ، 29 ، 30 ، 31 ].
توجه به این نکته مهم است که نمونه داده های مرجع برای هر دو روش ارزیابی دقت باید با وضوح داده های مورد نظر مطابقت داشته باشد. روش دقت موقعیتی از موقعیت اشیایی که روی نقشه شناسایی می شوند استفاده می کند و آنها را با موقعیت واقعی آنها بر روی زمین مقایسه می کند [ 30 ، 32 ]. روش دقت موضوعی مطابقت ویژگی نقشه را با داده های مرجع تعریف می کند [ 28 ].
در این مطالعه، ما هر دو روش دقت موقعیتی و موضوعی را بر روی نقشههای ارتوفتو با وضوح بالا تولید شده در شرایط مختلف محیطی انجام دادیم. برای بررسی تأثیر آنها بر کیفیت و قابلیت اطمینان تصاویر UAS و دقت طبقهبندی نقشهها. برای دستیابی به آن، پروازهای UAS در یک منطقه ساحلی خاص، در زمانها و شرایط محیطی مختلف، با استفاده از تنظیمات مشابه UAS و برنامه پرواز (ارتفاع پرواز، همپوشانی و غیره) انجام شد. دامنه کار حاضر نشان دادن این است که چگونه و در چه سطحی شرایط محیطی حاکم در یک منطقه مورد مطالعه در طول اکتساب داده های UAS بر کیفیت تصاویر به دست آمده UAS از طریق تجزیه و تحلیل ارزیابی دقت تأثیر می گذارد.
2. مواد و روشها
2.1. منطقه مطالعه
منطقه مورد مطالعه در ساحل پامفیلا واقع شده است که در هفت کیلومتری شمال شهر میتیلین، جزیره لزوس، یونان قرار دارد ( شکل 1 ). این منطقه به این دلیل انتخاب شد که بستر آن دارای زیستگاه ها و اعماق متنوعی است که برای مطالعه ارزیابی دقت ایده آل است. علاوه بر این، این منطقه به راحتی قابل دسترسی است و یک منطقه پرواز UAS محدود نیست. منطقه مورد بررسی نزدیک به یک بندر کوچک واقع بین ساحل و یک جزیره کوچک است. این منطقه در گذشته با استفاده از یک سیستم سونار قایق و تصاویر UAS برای نقشه برداری اعماق دریا مورد بررسی قرار گرفته است، زیرا بستر آن توسط یک علفزار علف دریایی گسترده Posidonia oceanica پوشیده شده است. پوزیدونیا اقیانوسیکایکی از مهم ترین گونه های علف دریایی است که فقط در دریای مدیترانه یافت می شود، در اعماق از سطح تا عمق 40-45 متر [ 16 ]. علفزارهای دریایی نقش مهمی در اکوسیستم های دریایی دارند و خدمات زیادی را ارائه می دهند، مانند زمین های پرورش مناسب و مهدکودک در آب های ساحلی، حفظ رسوب، حفاظت از ساحل، بهبود کیفیت آب، و چرخه مواد مغذی [ 33 ، 34 ].
2.2. پروتکل اکتساب داده UAS
پروتکل اکتساب داده UAS که توسط Doukari و همکاران توسعه یافته است. (2019) [ 25 ] پارامترهایی را خلاصه می کند که بر قابلیت اطمینان فرآیند جمع آوری داده در محیط دریایی با استفاده از UAS تأثیر می گذارد. پروتکل پیشنهادی UAS شامل سه بخش اصلی است: (1) مورفولوژی منطقه مورد مطالعه، (2) شرایط محیطی، و (iii) برنامه ریزی بررسی.
بخش اول شامل پارامترهایی مانند موقعیت منطقه مورد مطالعه، شرایط محیطی و پدیده های حاکم بر منطقه و اطلاعات دریایی (به عنوان مثال، آب سنجی، زیستگاه های دریایی) است. پارامترهای این بخش برای تصمیمگیریهای برنامهریزی پرواز، مربوط به ارتفاع پرواز، تجهیزات لازم برای جمعآوری دادهها و تعداد مناسب بررسیهای UAS مورد نیاز برای ثبت وسعت منطقه مفید است. بخش دوم به شرایط آب و هوایی (یعنی سرعت باد، دمای هوا، نور خورشید) و پارامترهای اقیانوس شناسی (به عنوان مثال، کدورت، جزر و مد، و فنولوژی) تقسیم می شود. این پارامترها بر کیفیت دادههای UAS بیشترین تأثیر را میگذارند، زیرا مصنوعات قابل مشاهده روی سطح دریا و ستون آب تولید میکنند و بر دید بستر دریا تأثیر میگذارند. بخش سوم به پارامترهای پرواز مانند پارامترسازی UAS، انتخاب سنسور مناسب و برنامه ریزی پرواز اشاره دارد. برنامهریزی نظرسنجی یک فرآیند سخت است زیرا برای یک بررسی کارآمد UAS بسیار مهم است [25 ].
در این مطالعه، پارامترهای محیطی (به عنوان مثال، سرعت باد، دمای هوا، پوشش ابر، ارتفاع موج، نور خورشید) پروتکل اکتساب داده UAS بیشتر مورد بررسی قرار گرفت تا تأثیر آنها بر کیفیت نقشههای اورتوفوتو با وضوح بالا UAS مورد بررسی قرار گیرد. شرایط محیطی مختلف و زمانهای دستیابی برای کمک به شناسایی زمانها و شرایط بهینه پرواز UAS بررسی میشوند. نتایج می تواند به بررسی های کارآمد UAS در محیط دریایی منجر شود.
2.3. جمع آوری داده های UAS
پروازهای UAS با استفاده از سیستم DJI Phantom 4 Pro در ارتفاع پرواز 70 متری از زمین انجام شد. تصاویر با زاویه دید نادر (90 درجه) به دست آمدند و همپوشانی آنها 80٪ تنظیم شد. پروازهای UAS در زمان های مختلف و شرایط محیطی متفاوت انجام شد. برنامههای پرواز از طریق Pix4Dcapture در یک ماموریت شبکهای با خطوط پروازی که به صورت عمودی روی خط ساحلی تنظیم شدهاند، ایجاد شدند. تنظیمات پرواز برای هر پرواز یکسان بود تا پارامترهای پروازی را که ممکن است بر کیفیت نقشههای ارتوفوتو تأثیر بگذارد حذف کنند. این امکان مقایسه نتایج را منحصراً بر اساس تأثیر شرایط مختلف محیطی فراهم می کند. شرایط عمومی آب و هوا در منطقه از یک ایستگاه هواشناسی محلی قبل از هر پرواز UAS ثبت شد تا تأثیر آنها بر تصاویر به دست آمده بررسی شود.
چندین پرواز در چهار تاریخ 06/05/20، 10/05/20، 12/05/20 و 21/06/20 در ساعات مختلف شبانه روز انجام شد. تغییرات زمانی برای بررسی وجود اثر نور خورشید در زوایای مختلف خورشیدی و اینکه چگونه انکسار نور بر موقعیت ظاهری و شکل اجرام زیر آب تأثیر میگذارد، ضروری بود. علاوه بر این، تصاویر زیر آب و اندازه گیری عمق توسط یک غواص به دست آمد.
در تاریخ اول (06/05/20)، شرایط محیطی به دلیل سرعت باد شدید از 4 متر بر ثانیه تا 6 متر بر ثانیه با وضعیت دریا ناآرام، ایده آل نبود. دمای هوا حدود 20 درجه سانتیگراد و آسمان نیمه ابری بود. در تاریخ 20/10/05 شرایط خوب با اختلاف زمانی اندک، سرعت باد بین 1 متر بر ثانیه تا 2 متر بر ثانیه، وضعیت دریا آرام با چروک های کوچک، دمای هوا بین 18 درجه بود. درجه سانتی گراد و 23 درجه سانتی گراد و آسمان صاف بود. در تاریخ 20/12/05 سرعت باد از 3 متر بر ثانیه تا 5 متر بر ثانیه اندازه گیری شد، موج های دریا ملایم، دما 26 درجه سانتی گراد و آسمان نیمه ابری بود. در تاریخ 21/06/20، سرعت باد 3–4 متر بر ثانیه، وضعیت دریا ملایم، دما از 25 تا 27 درجه سانتی گراد و آسمان ابری بود ( جدول 1 ).
2.4. روش شناسی
گردش کار روششناختی پیشنهادی به چهار بخش تقسیم میشود، جمعآوری داده، پیش پردازش تصاویر UAS، پردازش اصلی، و تجزیه و تحلیل ( شکل 2 ). یک نقشه مرجع برای فرآیند ارجاع جغرافیایی، و داده های درجا به عنوان داده های آموزشی برای روش طبقه بندی.
تصاویر UAS از هر اکتساب برای تولید نقشههای ارتوفتو با وضوح بسیار بالا با استفاده از الگوریتمهای Structure from Motion (SfM) [ 35 ] و MultiView Stereo (MVS) [ 36 ]، در Agisoft Metashape [ 37 ] پیش پردازش شد. نقشههای ارتوفتو از نظر خطاهای موزاییکی تصحیح نشدند زیرا بخشی از مقایسه دقت موضوعی هستند. شش نقشه ارتوفتو تولید شده قبلاً توسط موقعیت های دوربین ارجاع داده شده بودند. سپس ارجاع جغرافیایی آنها با استفاده از نقشه مرجع تصحیح شد تا از جابجایی بین آنها جلوگیری شود و زیرمجموعه ای از نقشه های ارتوفتو برای تجزیه و تحلیل بیشتر انتخاب شد. اندازه پیکسل زیر مجموعهها سه سانتیمتر بود و به همین دلیل، میتوان از آنها به عنوان دادههای نمونه برای تحلیل ارزیابی دقت استفاده کرد.
برای انتخاب نقشه مرجع، از شش کاشی سفید زیر آب به اندازه 40 × 40 سانتی متر به عنوان اهداف استفاده کردیم که در عمق 0.5 تا 4 متر در کف دریا قرار گرفتند. رنگ سفید در مقایسه با علف های دریایی تیره تضادهای قوی ایجاد می کند و در مناطق شنی نیز قابل تشخیص است. اهداف کاشی نیز بر روی زیستگاه های مختلف قرار گرفتند تا دشواری رصد یعنی شکل اهداف افزایش یابد. توانایی تشخیص واضح شکل و وسعت هدف به عنوان یک شاخص برای انتخاب نقشه مرجع استفاده شد. نقشه ارتوفتو 10/05/20 در ساعت 16:00 به عنوان نقشه مرجع برای بخش هایی از تجزیه و تحلیل ارزیابی دقت انتخاب شد، زیرا کیفیت آن بالاترین کیفیت است زیرا شکل و وسعت اهداف زیر آب به وضوح قابل شناسایی است. علاوه بر این،
نمونه ای از یک کاشی زیر آب که در یک منطقه شنی در عمق 3.5 متری قرار گرفته است، در شکل 3 نشان داده شده است . وسعت اهداف با استفاده از یک آستانه تطبیقی با زبان برنامه نویسی R شناسایی شد. ما از یک آستانه بالا و پایین برای جداسازی مقادیر مربوط به کاشی ها در یک فایل شطرنجی جدید استفاده کردیم. شکل هدف در تاریخ 10/05/20 در ساعت 16:00 بهتر نمایش داده می شود، در حالی که در تاریخ های 10/05/20 در ساعت 10:00، 11:00 و 12/05/20 در ساعت 17:00 شکل با حضور نور خورشید و سطح دریا موج دار همچنین به دلیل تابش شدید آفتاب و کم نور بودن بستر، هدف در روزهای 20/06/05 و 20/06/20 شناسایی نشد. وسعت ظاهری اهداف نیز محاسبه و با اندازه واقعی کاشی ها که 0.16 متر مربع است مقایسه شد .. وسعت محاسبه شده کاشی ها در 10/05/20 در ساعت 10.00 و 11.00 بزرگتر از 0.16 متر مربع ( یعنی 0.19 متر مربع و 0.20 متر مربع ) است، در تاریخ 12/05/20 کوچکتر (0.13 متر مربع ) از اندازه واقعی، و در 10/05/20 در ساعت 16:00 برابر با 0.16 متر مربع است .
ارزیابی دقت این مطالعه به تحلیل دقت موضوعی و موقعیتی تقسیم می شود. در تجزیه و تحلیل دقت موضوعی، نقشه ارتوفتو مرجع با هر نقشه ارتوفوتو از نظر کیفیت و صحت طبقه بندی کلی آنها مقایسه شد. تفاوتهای آنها با استفاده از روشهای تشخیص تغییر، کمی و تجسم شد. در تجزیه و تحلیل دقت موقعیتی، ویژگیهای نقشههای ارتوفوتو با تفاوتهایشان در موقعیت مرکز، وسعت و شکل مقایسه شد.
برای بخش اول ارزیابی دقت موضوعی، نقشههای ارتوفتو تاریخهای مختلف با استفاده از تکنیک طبقهبندی نظارت شده حداکثر احتمال (ML) به سه کلاس، علفهای دریایی، شن و ماسه و بستر مخلوط طبقهبندی شدند [ 38 ]. این تکنیک یکی از رایج ترین طبقه بندی های نظارت شده است که در تصاویر سنجش از دور استفاده می شود [ 39 ]. تصاویر زیر آب زیستگاه ها با موقعیت های ارتوفتو-نقشه آنها مطابقت داده شد و به عنوان داده های آموزشی مورد استفاده قرار گرفت ( شکل 1).). ما از بیست نقطه از هر کلاس به عنوان داده های نمونه برای فرآیند طبقه بندی استفاده کردیم. برای مقایسه آمار کلاسهای طبقهبندی و دقت کلی تصاویر طبقهبندیشده، ماتریسهای خطا را با استفاده از نقشه طبقهبندی مرجع انتخاب شده به عنوان تصویر حقیقت زمین محاسبه کردیم. علاوه بر این، ما تکنیک طبقهبندی تحت نظارت ماشینهای بردار پشتیبانی (SVM) [ 39 ]، یک الگوریتم پیچیدهتر یادگیری ماشینی را برای بررسی اعتبار نتایج به کار بردیم. نتایج طبقهبندی SVM رفتاری مشابه با نتایج طبقهبندی اولیه ML نشان میدهد ( پیوست A ، جدول A2 )، و هیچ تحلیل دیگری با استفاده از آن طبقهبندیکننده انجام نشد.
برای شناسایی تفاوتهای بین نقشههای طبقهبندی شده، از یک گردش کار تغییر موضوعی استفاده کردیم. گردش کار تغییر موضوعی از دو تصویر طبقهبندی که در زمانهای مختلف گرفته شدهاند استفاده میکند و منجر به انتقال کلاس، از یک کلاس به کلاس دیگر میشود. نقشه طبقه بندی شده 10/05/20 در ساعت 16:00 به عنوان یک نقشه مرجع برای مقایسه تشخیص تغییر برای بخش دوم ارزیابی دقت موضوعی استفاده شد. اگرچه روشهای تشخیص تغییر معمولاً برای تشخیص تغییرات واقعی در محیط دریایی استفاده میشوند، اما در این مطالعه از آنها برای تأکید بر اهمیت عوامل برونزا در قابلیت اطمینان دادههای دریایی استفاده میشود.
در تحلیل دقت موقعیتی، تشخیص و استخراج ویژگی های نقشه ضروری است. پس از بررسی بصری نقشه های ارتوفوتو، ویژگی های لکه های علف دریایی به شکل دایره ای منحصر به فرد و اندازه های مختلف به عنوان اشیاء مقایسه انتخاب شدند. برای شناسایی تفاوتهای آنها در نقشههای ارتوفتو، موقعیت، وسعت و شکل آنها را تحلیل کردیم. از آنجایی که نقشههای ارتوفتو قبلاً از نظر موقعیت خود با استفاده از همان نقشه مرجع تصحیح شدهاند، ما فرض میکنیم که تفاوتهای احتمالی در ویژگیهای آنها به دلیل پارامترهایی است که بر سطح دریا و شفافیت آب تأثیر میگذارد و شکل آنها را تغییر میدهد.
تغییرات بین اشیاء انتخاب شده به صورت چند ضلعی استخراج شد. سه روش بر روی استخراج چند ضلعی با استفاده از تکنیک های خودمختار و نیمه مستقل مورد بررسی قرار گرفت. روش اول استفاده از آستانه تطبیقی بود که اشیاء را ایزوله می کند و سپس آنها را با استفاده از زبان برنامه نویسی R بردار می کند. یک مشکل در این روش این است که آستانه تطبیقی به طور دقیق وسعت همه اشیا را توصیف نمی کند. روش دوم، تقسیمبندی نقشه ارتوفتو در اشیایی بود که نیاز به ادغام دستی قطعات آنها داشت. در روش سوم، از بردارهای چندضلعی های طبقه بندی شده از روش طبقه بندی نظارت شده استفاده کردیم. روش سوم به اندازه کافی اشکال اشیاء را توصیف می کند، به مداخله کاربر برای جداسازی اشکال نیاز ندارد، بنابراین برای استخراج چند ضلعی ترجیح داده شد.
در نهایت، برای مقایسه موقعیت اجسام، از نقاط مرکز آنها استفاده کردیم، زیرا آنها قابل اعتمادترین نقاط برای توصیف موقعیت یک چندضلعی هستند. مرکز چند ضلعی ها توسط یک فرآیند خودکار با استفاده از ابزار ویژگی به نقطه در نرم افزار ESRI ArcMap محاسبه شد که ویژگی های نقطه ای تولید شده از مکان های نماینده ویژگی های ورودی را ایجاد می کند. برای ویژگی های چند ضلعی، این نقطه در مرکز ویژگی قرار دارد. برای تخمین خطاهای فاصله بین مرکزهای محاسبه شده از مرکزهای مرجع، نزدیکترین فاصله آنها را نقطه به نقطه محاسبه کردیم.
3. نتایج و بحث
نقشههای ارتوفتو تاریخهای مختلف تفاوتهای آشکاری را در کیفیت، روشنایی و قابلیت اطمینان نشان میدهند. تفاوتها نه تنها به دلیل زمانهای مختلف اکتساب، وضعیت دریا، و شرایط محیطی است، بلکه به دلیل نتایج فرآیند SfM نیز میباشد. برخی از آنها دارای تصاویر نامناسب هستند و خطوط درز موزاییک قابل مشاهده است که منجر به ایجاد تکه های تصویری در نقشه های ارتوفوتو می شود. زیرمجموعههای نقشههای ارتوفتو همان منطقه مورد مطالعه در شکل 4 الف ارائه شدهاند.
بازرسی بصری نقشههای ارتوفتو تفاوتهای متعددی را نشان میدهد که میتوان آنها را با شرایط آب و هوایی حاکم در منطقه و زمانهای جمعآوری داده توضیح داد. نقشه ارتوفتو مورخ 06/05/20 در ساعت 12:00 بیشتر وسعت خود را نور خورشید پوشانده است که در ترکیب با حالت دریای موج دار منجر به ایجاد مناطق کور از بستر دریا می شود. شرایط در 06/05/20 اجازه تمایز زیستگاه های دریایی را نمی دهد، در حالی که به نظر می رسد بخش هایی از ارتوفوتو-نقشه ناهمسو هستند. نقشه ارتوفتو 10/05/20 در ساعت 10:00 به اندازه کافی واضح است و دارای چروک های موجی است که وسعت و شکل زیستگاه ها را تغییر می دهد. در همان روز، در ساعت 11:00 سطح دریا ناهموارتر بود، مناطق آفتابی و خطوط درز بسیار متمایز وجود دارد که کیفیت نقشه ارتوفتو را کاهش می دهد. بعداً، همان روز، ساعت 16. 00 نقشه ارتوفتو بسیار واضح با روشنایی ایده آل است که امکان تمایز زیستگاه را فراهم می کند. شرایط در آن روز تغییرات زمانی ایجاد کرد که به حالت دریا، حضور-غیبت نور خورشید و روشنایی بستر دریا نسبت داده می شود.
در تاریخ 12/05/20 ساعت 17:00، نقشه ارتوفوتو چین و چروکهای موجی کوچکی را در سطح دریا و مناطق آفتابگیر در حالی که روشنایی نقشه کم است نشان میدهد. آخرین نقشه ارتوفوتو در 21/06/20 در ساعت 13:00، مشکلات موزاییکی را با خطوط درز آشکار ارائه می دهد که مانع از دید بستر دریا و تمایز زیستگاه می شود. حضور گسترده نور خورشید همراه با سطح موج دار دریا منجر به نتیجه رضایت بخشی شد. بارزترین تفاوت در نقشه های ارتوفتو به دلیل شرایط دریا و حضور نور خورشید است. بازرسی بصری تأیید کرد که سرعت باد زیاد و زاویه ارتفاع خورشیدی بالا برای جمعآوری دادههای دریایی با استفاده از UAS ایدهآل نیستند.
تفاوت های بصری شناسایی شده از طریق روش های طبقه بندی و تشخیص تغییر کمی سازی شدند. نتایج طبقه بندی تفاوت هایی را در ظرفیت برای تمایز زیستگاه ها در تصاویر طبقه بندی شده نشان می دهد ( شکل 4ب) و همچنین به دقت کلی آنها. در زیرمجموعه طبقهبندیشده 20/06/05، بیشترین بخش از مناطق آسیبدیده با نور خورشید بهجای شن و ماسه و علفدریایی، بهعنوان بستر مختلط ارائه میشود که بیشترین بخش از نقشه ارتوفتو را به خود اختصاص داده است. در زیر مجموعه طبقه بندی شده 10/05/20، در ساعت 10.00، بخشی از بستر مخلوط (بالا و سمت چپ) به عنوان علف دریایی طبقه بندی می شود و مناطق کوچکتر ماسه احتمالاً به دلیل امواج به عنوان بستر مخلوط طبقه بندی می شوند. در تاریخ 10/05/20، ساعت 11:00، زیرمجموعه بخشهای کوچکی از نویز تصویر را در مناطق شنی و علفدریایی به دلیل نور خورشید که عمدتاً به عنوان بستر مخلوط طبقهبندی شده است، ارائه میکند. در تاریخ 10/05/20، ساعت 17:00، به نظر میرسد که کلاسها بهتر منطقهای هستند، حتی بخشهای کوچکی از بستر مخلوط در اطراف مناطقی با علفهای دریایی، جایی که سنگها، زبالهها یا برگهای مرده علفهای دریایی وجود دارد، ارائه میشوند.
در تاریخ 12/05/20، زیرمجموعه طبقه بندی شده مشابه قبلی است، با تغییراتی در شکل زیستگاه. زیرمجموعه طبقه بندی شده در 21/06/20 برخی از مناطق طبقه بندی نشده را به رنگ سیاه و بسیاری از مناطق طبقه بندی نشده از لایه های مخلوط و بخش های علف دریایی را ارائه می دهد. به نظر میرسد که نور خورشید بیشترین قسمتهای طبقهبندی اشتباه را در تصویر 20/06/05، تصویر 21/05/20 و بخشهایی از نویز تصویر در مناطق کوچکتر در تصاویر 10/05/20، در ساعت 10.00 و 11.00 همراه با سطح دریا موج دار تصویر 10/05/20 در ساعت 16 کیفیت بهتری دارد و مناطق کمتر طبقه بندی شده را نشان می دهد و به عنوان یک نقشه مرجع برای محاسبه ماتریس های سردرگمی استفاده می شود.
درصد پوشش (%) مناطق طبقه بندی شده در جدول A1 ( پیوست A ) ارائه شده است. در هر دو تاریخ (06/05/20، 21/06/20)، با حضور گسترده آفتاب، کلاس علفهای دریایی تا 30 درصد دستکم گرفته میشود، در حالی که بستر مخلوط در تاریخ اول به 38 درصد افزایش مییابد، و هر دو شن و ماسه. و در تاریخ دوم بستر را تا 13 درصد مخلوط کنید. دقت کلی تصاویر طبقه بندی شده از 68% تا 95% و شاخص های کاپا از 0.6 تا 0.9 متغیر است. کمترین دقت 92/67 درصد در تاریخ 20/06/05 و بیشترین میزان 25/95 درصد در تاریخ 20/12/05 محاسبه شده است.
تصاویر گردش کار تغییر موضوعی تغییرات بین تصاویر طبقه بندی شده و تصویر مرجع را برای هر کلاس نشان می دهد ( شکل 5). تغییرات به دلیل شرایط محیطی متفاوت و نه تغییرات واقعی در منطقه، مناطقی را که به طور دقیق طبقه بندی نشده اند، نشان می دهد. مشاهده می شود که کلاس های تشخیص تغییر از علف دریایی به بستر مخلوط (سبز) بخش بزرگی از تصویر را در تاریخ 06/05/20 و 21/06/20 اشغال می کند. همچنین، نواحی از علف های دریایی به کلاس شنی (قرمز) تغییر یافته اند. تغییرات از مخلوط به علف دریایی (نارنجی) در همه تصاویر با بیشترین میزان در تصویر 21/06/20 و 10/05/20 در ساعت 10:00 مشاهده می شود. تغییرات از شن به مخلوط (آبی) در بخش بزرگی از 06/05/20 و 10/05/20 در ساعت 11:00 مشهود است و تغییرات از مخلوط به ماسه (بنفش) بیشتر در 12/05/20 نشان داده شده است.
گردش کار تشخیص تغییر همچنین منجر به درصد تغییرات برای هر کلاس شد ( جدول A3 ، ضمیمه A). بیشترین تغییرات در تاریخ 20/06/05 محاسبه شده است که در مجموع 45 درصد تصویر، 33 درصد از علف دریایی به بستر مخلوط، 7.42 درصد از ماسه به مخلوط و 1.56 درصد از علف دریایی به ماسه تغییر یافته است. تغییرات قابل توجهی نیز در تاریخ 21/06/20 در مجموع 41 درصد از تصویر مشاهده شد. 16 درصد از علف های دریایی به عنوان ماسه و 15.23 درصد به عنوان بستر مخلوط، 3.5 درصد از بستر مخلوط به علف های دریایی طبقه بندی شده اند. در هر دو تاریخ، سطح دریا به دلیل سرعت باد زیاد ناهموار بود و نمیتوان از حضور نور خورشید جلوگیری کرد زیرا در زمان جمعآوری دادهها (12:00 و 13:00) خورشید در بلندی آسمان بود. کمترین تغییرات در تاریخ 20/12/06 در کل درصد 6.5 درصد از تصویر محاسبه شده است. به نظر می رسد شرایط و زمان کسب در آن روز نزدیک به بهینه باشد، زیرا سطح دریا آرام است.
نتایج مقایسه اشیاء دارای تفاوتهای زیادی در زمینهها، شکلها و موقعیتهای اشیا هستند ( جدول A4 ، ضمیمه A). در تاریخ 06/05/20، بسیاری از اشیاء کوچکتر از داده های مرجع هستند، در حالی که شکل اشیاء به نظر می رسد تحریف شده است. این بیشتر به دلیل کیفیت پایین ارتوفوتو-نقشه است که اجازه نمی دهد طرح کلی اشیاء درست شود، و حضور گسترده نور خورشید که شکاف هایی را روی اشیاء ایجاد می کند. در تاریخ 10/05/20، اشکال و اندازه های چند ضلعی به اشیاء مرجع نزدیک است و تفاوت آنها به دلیل موج کوچک دریا است که شکل و مساحت اجسام را مخدوش می کند. در تاریخ 12/05/20، حالت دریای مواج و مناطق محدود نور خورشید، شکل اجسام را کاملاً تغییر داده است. در تاریخ 21/06/20، بیشتر اشکال اجسام به دلیل امواج و نواحی پر نور منحرف میشوند.
شکل 6 شکل و وسعت جسم 5 را در تاریخ های مختلف نشان می دهد. چند ضلعی قرمز وسعت و شکل شی مرجع را نشان می دهد. در تاریخ 20/12/05 مساحت شیء دارای 1.61% افزایش است که کمترین اختلاف مساحت نسبت به شی مرجع است و در تاریخ 21/06/20 کاهش 23% در مساحت وجود دارد که بیشترین اختلاف مساحت است. . به نظر می رسد که بخش زیادی از این شی به دلیل تابش نور خورشید و امواج روی سطح دریا جزو علف های دریایی طبقه بندی نشده است.
مقایسه مرکزهای محاسبه شده با مرکزهای مرجع در 10/05/20 در ساعت 16.00، منجر به خطاهای موقعیت مرکزی اشیا شد ( جدول A5 ، ضمیمه A ). با توجه به نتایج جدول A5 ( پیوست A )، اکثر خطاهای فاصله در 20/05/06 محاسبه شده است، جایی که اشیاء تحریف شده بودند. نمونه ای از موقعیت های مرکز محاسبه شده دو جسم با اندازه های مختلف در شکل 7 ارائه شده است.. طبق محاسبات روی جسم اول، بیشترین فاصله برای مرکز در تاریخ 10/05/20 در ساعت 10.00 محاسبه شده است که 0.48 متر و کمترین فاصله 0.08 متر در 21/06/20 محاسبه شده است. در شی دوم، بزرگترین فاصله مرکز محاسبه شده 0.39 متر در 06/05/20، و کوچکترین 0.10 متر در 10/05/20 در ساعت 10:00 است.
مشاهده میشود که بیشترین خطاها در مناطق و موقعیتها در تاریخهایی محاسبه میشود که کیفیت نقشههای ارتوفتو تحت تأثیر شرایط محیطی (مانند سرعت باد، امواج، موقعیت خورشیدی) قرار گرفته است. تفاوت در وسعت و موقعیت اجسام به احتمال زیاد به دلیل زاویه شکست نور است که به زاویه خورشید بستگی دارد و شرایط محیطی که بر روی دید بستر دریا و تمایز زیستگاه تأثیر می گذارد. اگرچه معمولاً از روشهای تشخیص تغییر برای تشخیص تغییرات واقعی در محیط دریایی استفاده میشود، اما در این مطالعه برای تأکید بر اهمیت عوامل برونزا در قابلیت اطمینان دادهها استفاده شد.
چالش ها و محدودیت های اکتساب داده های UAS در محیط دریایی در ادبیات منتشر شده مورد بحث قرار گرفته است. با توجه به مطالعات منتشر شده، ما تأثیر شرایط محیطی را بر کیفیت دادههای مشتق شده UAS بررسی کردیم. استفاده از پارامترهای پروازی یکسان در یک منطقه مطالعاتی ساحلی، در زمانهای مختلف اکتساب و شرایط محیطی متنوع، به ما این امکان را میدهد که نقشههای ارتوفوتو تولید شده را از نظر دقت موقعیتی و موضوعی آنها مقایسه کنیم. مطالعات مشابه تأثیر شرایط محیطی را در مناطق مختلف ساحلی [ 10 ] و مکان ها [ 22 ] بررسی کرده اند. قابلیت اطمینان داده های به دست آمده UAS از طریق دقت کلی طبقه بندی در مورد ارتفاع UAS مورد بررسی قرار گرفته است [ 40]، و وضوح فضایی [ 41 ]. در این مطالعه، ما از همان ارتفاع UAS و وضوح فضایی برای تأکید و اندازهگیری تأثیر شرایط محیطی بر کیفیت دادههای بهدستآمده استفاده کردیم.
نقشه برداری دقیق زیستگاه برای نظارت بر تغییرات زیستگاه ضروری است، به عنوان مثال، کاهش بسترهای علف دریایی [ 33 ]. خطاهای طبقهبندی بالا که بسته به زمان نمونهبرداری و شرایط محیطی بهصورت غیرقابل پیشبینی متفاوت است، چنین تلاشهای نظارتی را به خطر میاندازد، زیرا منجر به سریهای زمانی نقشههای زیستگاه با نویز بالا میشود، که تغییرات واقعی را پنهان میکند و مانع تشخیص زودهنگام آنها میشود.
4. نتیجه گیری
در این مطالعه، ما تأثیر شرایط محیطی را بر کیفیت و قابلیت اطمینان اطلاعات دریایی سنجش از دور UAS بررسی کردیم. روشهای ارزیابی دقت تأیید کردند که کیفیت نقشههای ارتوفوتو با وضوح بالا و دقت طبقهبندی زیستگاه ساحلی تحتتاثیر شرایط محیطی حاکم بر منطقه و زمان جمعآوری دادهها قرار دارد. واضحترین تفاوتها در نقشههای ارتوفوتو به شرایط وضعیت دریا و حضور نور خورشید اشاره دارد، در حالی که تفاوتهای روشنایی کوچک در بستر دریا نیز مشاهده شده است. بازرسی بصری تأیید کرد که سرعت باد بالا و زاویه ارتفاع خورشیدی بالا برای جمعآوری دادههای ساحلی با استفاده از UAS ایدهآل نیستند.
استفاده از دو طبقهبندیکننده مختلف نشان داد که برای محاسبه درصد پوشش در این مطالعه، نیازی به استفاده از الگوریتم پیچیدهتر SVM یادگیری ماشینی نیست، زیرا نتایج آن مشابه نتایج طبقهبندیکننده ML است. نتایج تجزیه و تحلیل تأیید کرد که شرایط محیطی رایج در طول اکتساب دادههای UAS به طور قابلتوجهی بر دقت طبقهبندی تأثیر میگذارد. ارزیابی دقت موضوعی منجر به تصاویر طبقهبندی اشتباه شد، با افزایش/کاهش قابلتوجه طبقات در تاریخهایی که سرعت باد بالاتر از 3 متر بر ثانیه و سطح دریا موجدار با حضور نور خورشید بود. علاوه بر این، تأیید شده است که در زمانهای جمعآوری دادهها از ساعت 11:00 تا 15:00، اجتناب از حضور نور خورشید در سطح دریا تقریباً غیرممکن است.
تجزیه و تحلیل دقت موقعیتی تغییرات مهمی را در وسعت، شکل و موقعیت اشیاء انتخاب شده نشان داد. با توجه به اینکه اجسام در مدت زمان کوتاهی تغییر نکرده اند، نتیجه می گیریم که تفاوت های محاسبه شده به تغییرات ناشی از شرایط مختلف محیطی، زمان اکتساب و شکست نور نسبت داده می شود. نتایج تجزیه و تحلیل دقت موقعیتی بر اهمیت دادههای با وضوح بالا قابل اعتماد برای تشخیص ویژگیهای کوچک و تمایز گونههای مختلف در کاربردهای ساحلی تأکید میکند. علاوه بر این، تجزیه و تحلیل ارزیابی دقت نشان میدهد که کیفیت دادههای UAS تحت تأثیر مجموعهای از عواملی است که با یکدیگر تعامل دارند و بر یکدیگر تأثیر میگذارند، بنابراین باید برای یک بررسی UAS کافی در مناطق ساحلی در نظر گرفته شود. این عوامل، یعنی سرعت باد، شرایط سطح دریا و نور آفتاب، بازههای زمانی موجود برای جمعآوری دادههای دریایی را کاهش میدهد. بنابراین، مهم است که بتوانیم تأثیر آنها بر داده های به دست آمده را شناسایی و درک کنیم.
UAS یک ابزار امیدوارکننده برای نقشه برداری با وضوح بالا و برای نظارت بر زیستگاه های کم عمق است، اما برای ایمن سازی شرایط بهینه و در نتیجه اجتناب از اشتباهات طبقه بندی جدی، احتیاط لازم است. با تطبیق یک پروتکل اکتساب داده مناسب که مقادیر بهینه را برای همه متغیرهای محیطی موثر بر کیفیت نقشههای ارتوفوتو تولید شده توسط UAS تنظیم میکند، میتوان از پتانسیل UAS برای نقشهبرداری و پایش زیستگاه به طور کامل بهرهبرداری کرد. در این مطالعه، با ارائه دادههای بهدستآمده در زمانهای مختلف روز، تأیید کردیم که زمان اکتساب (بسته به موقعیت خورشیدی)، بر روشنایی بستر دریا و وجود / عدم وجود نور خورشید در سطح دریا تأثیر میگذارد. ما همچنین ثابت کردیم که اکتساب دادههای UAS در شرایط غیربهینه میتواند منجر به نقشههای ارتوفوتو غیردقیق و غیرقابل اعتماد و نتایج نادرست نقشهبرداری زیستگاه دریایی شود.
پیوست اول

جدول A1.آمار طبقه بندی حداکثر احتمال (ML) درصدهای پوشش، (درصد = (ارزش/ارزش کل) × 100). در تاریخ 06/05/20، مناطق آفتابگیر و بخشهای بزرگ علفهای دریایی به عنوان بستر مخلوط طبقهبندی شدهاند که درصد پوشش این کلاس را تا حد زیادی به 34.72 درصد افزایش داده است. در تصویر طبقهبندی شده 10/05، تفاوتهای کوچکی در پوششهای کلاس وجود دارد، با بیشترین تفاوت در کلاس زیرلایه مخلوط که در ساعت 11.00 به دلیل حضور نور خورشید افزایش یافته است. تصویر طبقه بندی شده 12/05/20 نزدیکترین درصد پوشش را به داده های مرجع دارد، با تفاوت های اندک به دلیل عدم تمایز قطعات علف دریایی با بستر مخلوط. در تاریخ 21/06/20 درصدها نشان میدهد که تقریباً 20 درصد از علفهای دریایی به عنوان ماسه و بستر مخلوط طبقهبندی شدهاند. دقت کلی از 67.92 تا 97.92 درصد متغیر است.
جدول A2. آمار طبقه بندی ماشین های بردار پشتیبانی (SVM) درصدهای پوشش. در تاریخ 20/06/05 بخشهایی از علفهای دریایی بهعنوان ماسه و بستر مخلوط طبقهبندی شدند که درصد پوشش این طبقات را افزایش داد. در تاریخ 12/05/20، درصدهای پوشش به درصدهای مرجع نزدیکتر شده است (10/05/20، ساعت 16.00). در تاریخ 21/06/20، تقریبا 30 درصد از علف های دریایی به اشتباه به عنوان ماسه و بستر مخلوط طبقه بندی شده است. دقت کلی از 54.81 تا 96.81 درصد متغیر است.
جدول A3. درصد تغییرات از کلاسی به کلاس دیگر توسط گردش کار تشخیص تغییر محاسبه می شود.
جدول A4. اختلاف درصدی مناطق شی درصدهای مثبت نشان دهنده نواحی شی که کوچکتر از اشیاء مرجع هستند و درصدهای منفی، مناطق شی بزرگتر از اشیاء مرجع هستند. مشاهده می شود که هشت مورد از اشیاء در تاریخ 06/05/20 و سه مورد در 21/06/20 بیشترین اختلاف را دارند. کمترین اختلاف مساحت هفت شی در 10/05/20 ساعت 10.00، دو مورد در 12/05/20 و یکی در تاریخ های دیگر محاسبه شد.
جدول A5. خطاهای فاصله مرکز محاسبه شده (m). بزرگترین و کوچکترین خطای فاصله شش چند ضلعی در تاریخ 06/05/20، پنج خطا در 10/05/20 ساعت 10.00، چهار خطا در 10/05/20 در ساعت 11:00، دو خطا در 12/05/20 و پنج خطا در تاریخ 20/12/05 محاسبه شده است. 21/06/20.
منابع
- طولانی، WJL; Thom, RM بهبود کیفیت زیستگاه علف دریایی. در روش های تحقیق جهانی علف دریایی ; Elsevier Science: آمستردام، هلند، 2001; ص 407-423. [ Google Scholar ]
- مکری، د. استاماتیس، پ. دوکاری، م. پاپاکنستانتینو، ا. واسیلاکوس، سی. نقشه برداری چند مقیاسی علف دریایی در داده های ماهواره ای و استفاده از UAS در ارزیابی دقت. در مجموعه مقالات ششمین کنفرانس بین المللی سنجش از دور و اطلاعات جغرافیایی محیط زیست (RSCy2018)، پافوس، قبرس، 26 تا 29 مارس 2018؛ پ. 8. [ Google Scholar ]
- توپوزلیس، ک. اسپوندیلیدیس، SC; پاپاکنستانتینو، ا. Soulakellis، N. استفاده از تصاویر Sentinel-2 برای نقشه برداری علف دریایی: مطالعه موردی خلیج Kalloni (جزیره Lesvos، یونان). در مجموعه مقالات چهارمین کنفرانس بین المللی سنجش از دور و اطلاعات جغرافیایی محیط زیست، پافوس، قبرس، 4 تا 8 آوریل 2016. جلد 9688، ص. 96881F. [ Google Scholar ] [ CrossRef ]
- تراگانوس، دی. آگاروال، بی. پورسانیدیس، د. توپوزلیس، ک. کریسولاکیس، ن. Reinartz، P. به سمت نقشه برداری و نظارت بر علف های دریایی در مقیاس جهانی با استفاده از Sentinel-2 در موتور Google Earth: مطالعه موردی دریاهای اژه و ایونی. Remote Sens. 2018 , 10 , 1227. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تاموندونگ، AM؛ بلانکو، AC؛ فورتس، MD؛ Nadaoka، K. نقشه برداری از علف های دریایی و دیگر زیستگاه های اعماق دریا در Bolinao، Pangasinan با استفاده از تصویر ماهواره ای Worldview-2. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2013 – IGARSS، ملبورن، استرالیا، 21 تا 26 ژوئیه 2013. صفحات 1579-1582. [ Google Scholar ]
- یوجنیو، اف. مارچلو، جی. مارتین، جی. نقشههای با وضوح بالا از عمقسنجی و زیستگاههای اعماق دریا در محیطهای آب کم عمق با استفاده از تصاویر سنجش از دور چندطیفی. IEEE Trans. Geosci. Remote Sens. 2015 , 53 , 3539–3549. [ Google Scholar ] [ CrossRef ]
- Amran, MA برآورد پوشش علفدریایی با استفاده از شاخصهای تغییرناپذیر عمق در تصویربرداری سریع پرنده. Biotropia 2010 ، 17 ، 42-50. [ Google Scholar ]
- کوگان، آر. پوپولوس، جی. وایت، جی. شیهان، ک. فیتزپاتریک، اف. Piel, S. بررسی استانداردها و پروتکل ها برای نقشه برداری زیستگاه های بستر دریا. MESH نقشه برداری زیستگاه های بستر دریای اروپا، برنامه اروپایی INTERREG. 2007. در دسترس آنلاین: https://www.researchgate.net/profile/jonathan_white12/publication/269630850_review_of_of_ofive-dibive–seapived_habitat_mapping/links/links/55e06b7608ae2fe2 ژانویه 2021).
- ادموند، پی جی; مومبی، پی. ادواردز، ای جی; Clark, CD Remote Sensing Handbook for Tropical Beach Management ; انتشارات یونسکو: پاریس، فرانسه، 2000. [ Google Scholar ]
- ناهیرنیک، NK; رشیتنیک، ال. کمپبل، ام. هسینگ-لوئیس، م. کاستا، ام. یاکیمیشین، ج. لی، ال. نقشه برداری با اطمینان. ترسیم زیستگاه های علف دریایی با استفاده از سیستم های هوایی غیر اشغالی (UAS). از راه دور. سنس اکل. حفظ کنید. 2019 ، 5 ، 121-135. [ Google Scholar ] [ CrossRef ]
- گونزالس، نقشه برداری RC Seagrass Meadows، با استفاده از تصاویر هوایی در ارتفاع پایین . دانشگاه لیسبون: لیسبون، پرتغال، 2015. [ Google Scholar ]
- ونتورا، دی. بنیفازی، ع. گراوینا، MF; بلوسیو، آ. Ardizzone، G. نقشه برداری و طبقه بندی زیستگاه های دریایی حساس به محیط زیست با استفاده از تصاویر وسایل نقلیه هوایی بدون سرنشین (UAV) و تجزیه و تحلیل تصویر مبتنی بر شی (OBIA). از راه دور. Sens. 2018 , 10 , 1331. [ Google Scholar ] [ CrossRef ][ Green Version ]
- Klemas، VV سنجش از دور ساحلی و محیطی از وسایل نقلیه هوایی بدون سرنشین: یک مرور کلی. جی. ساحل. Res. 2015 ، 315 ، 1260-1267. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کلومینا، آی. Molina, P. سیستم های هوایی بدون سرنشین برای فتوگرامتری و سنجش از دور: یک بررسی. ISPRS J. Photogramm. Remote Sens. 2014 ، 92 ، 79-97. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Gonçalves، JA; Henriques, R. فتوگرامتری پهپاد برای پایش توپوگرافی مناطق ساحلی. ISPRS J. Photogramm. Remote Sens. 2015 ، 104 ، 101-111. [ Google Scholar ] [ CrossRef ]
- کازلا، ای. کولین، ای. هریس، دی. فرس، س. بجارانو، اس. پاراویسینی، وی. Hench، JL; Rovere, A. نقشه برداری از صخره های مرجانی با استفاده از هواپیماهای بدون سرنشین درجه یک مصرف کننده و ساختار از تکنیک های فتوگرامتری حرکتی. صخره های مرجانی 2017 ، 36 ، 269-275. [ Google Scholar ] [ CrossRef ]
- پاپاکنستانتینو، ا. توپوزلیس، ک. Pavlogeorgatos، G. شناسایی مناطق خط ساحلی و نقشه برداری سه بعدی ساحلی با استفاده از داده های فضایی پهپاد. ISPRS Int. J. Geoinf. 2016 ، 5 ، 75. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دیدون، ع. گاوسی، ا. لاگوریو، اس. Galgani, F. بهینه سازی پروتکل های نظارت بر بستر ساحلی از طریق تصاویر هوایی. مارس آلودگی. گاو نر 2018 ، 131 ، 212-217. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- توپوزلیس، ک. پاپاکنستانتینو، ا. Garaba، SP تشخیص پلاستیک های شناور از ماهواره و سیستم های هوایی بدون سرنشین (پروژه زباله پلاستیکی 2018). بین المللی J. Appl. زمین Obs. Geoinf. 2019 ، 79 ، 175-183. [ Google Scholar ] [ CrossRef ]
- کازلا، ای. روور، ا. پدرونچینی، آ. استارک، CP; کازلا، ام. فراری، م. Firpo، M. هواپیماهای بدون سرنشین به عنوان ابزاری برای نظارت بر تغییرات توپوگرافی ساحل در دریای لیگوریا (NW مدیترانه). GeoMarine Lett. 2016 ، 36 ، 151-163. [ Google Scholar ]
- سو، ال. Gibeaut, J. استفاده از تصاویر UAS Hyperspatial RGB برای شناسایی مناطق ساحلی در امتداد ساحل تگزاس جنوبی. از راه دور. Sens. 2017 , 9 , 159. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دافی، جی پی؛ کانلیف، AM; دبل، ال. سندبروک، سی جی; ویچ، SA; شاتلر، جی دی. Myers-Smith، IH; وارلا، ام آر؛ Anderson, K. Location, Location, Location: ملاحظات هنگام استفاده از پهپادهای سبک وزن در محیط های چالش برانگیز. از راه دور. سنس اکل. حفظ کنید. 2018 ، 4 ، 7–19. [ Google Scholar ] [ CrossRef ]
- فینکبینر، ام. استیونسون، بی. Seaman, R. Guidance for Benthic Habitat Mapping: An Aerial Photographic Approach ; NOAA / خدمات ملی اقیانوس / مرکز خدمات ساحلی: چارلستون، SC، ایالات متحده آمریکا، 2001.
- جویس، KE; دوسه، اس. لیهی، اس ام. لئون، جی. Maier، SW Principles و عمل به دست آوردن داده های تصویری مبتنی بر هواپیماهای بدون سرنشین در محیط های دریایی. مارس Freshw. Res. 2018 ، 70 ، 952. [ Google Scholar ] [ CrossRef ]
- دوکاری، م. باتساریس، م. پاپاکنستانتینو، ا. توپوزلیس، ک. یک پروتکل برای بررسی هوایی در مناطق ساحلی با استفاده از UAS. از راه دور. Sens. 2019 ، 11 ، 1913. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Mount, R. Acquisition of Through-water Aerial Survey Images: Surface Effects and the Prediction of Sun Glitter and Subsurface Illumination. فتوگرام مهندس Remote Sens. 2005 ، 71 ، 1407-1415. [ Google Scholar ] [ CrossRef ]
- فریزر، بی. Congalton، RG ارزیابی اثربخشی سیستمهای هوایی بدون سرنشین (UAS) برای جمعآوری دادههای مرجع ارزیابی دقت نقشه موضوعی در جنگلهای نیوانگلند. Forests 2019 ، 10 ، 24. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ماس، J.-F. پرز-وگا، آ. غیلاردی، ع. مارتینز، اس. Loya-Carrillo, JO; Vega, E. مجموعه ای از ابزارها برای ارزیابی دقت نقشه موضوعی. Geogr. J. 2014 ، 2014 ، 372349. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Flasse، S. سنجش از دور و ارزیابی دقت GIS. فتوگرام ضبط 2005 ، 20 ، 306-307. [ Google Scholar ] [ CrossRef ]
- ویرا، کائو مادر، PM; Aplinb، P. ارزیابی دقت موقعیتی و موضوعی داده های سنجش از دور. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2004 ، 35 ، 6. [ Google Scholar ]
- فودی، GM ارزیابی دقت داده های سنجش از راه دور: اصول و شیوه ها. فتوگرام ضبط 2010 ، 25 ، 204-205. [ Google Scholar ] [ CrossRef ]
- ارزیابی دقت موضوعی و موقعیتی Congalton، RG از دادههای سنجش از راه دور دیجیتال. در مجموعه مقالات هفتمین سمپوزیوم سالانه فهرست و تحلیل جنگل، پورتلند، ME، ایالات متحده آمریکا، 3 تا 6 اکتبر 2005. صص 149-154. [ Google Scholar ]
- ویکات، ام. دوارته، سی ام. Carruthers، TJB; Orth، RJ; دنیسون، WC; اولیارنیک، اس. کالادین، ا. Fourqurean، JW; هک، KLJ; هیوز، آر. و همکاران تسریع از بین رفتن علف های دریایی در سراسر جهان اکوسیستم های ساحلی را تهدید می کند. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2009 ، 106 ، 12377-12381. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Nordlund، LM; Koch، EW; Barbier، EB; خدمات اکوسیستم کرید، JC Seagrass و تنوع آنها در جنس و مناطق جغرافیایی. PLoS ONE 2016 , 11 , e0163091. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- التنر، ا. Sofia, G. ساختار از تکنیک متحرک فتوگرامتری. در تحولات در فرآیندهای سطح زمین ; Elsevier BV: آمستردام، هلند، 2020؛ جلد 23، ص 1-24. [ Google Scholar ]
- گوزل، م. کورلس، بی. Seitz، SM Multi-View Stereo Revisited. Proc. محاسبات IEEE. Soc. Conf. محاسبه کنید. Vis. تشخیص الگو 2006 ، 2 ، 2402-2409. [ Google Scholar ]
- Agisoft. کتابچه راهنمای کاربر Agisoft Metashape نسخه حرفه ای، نسخه 1.6 . Agisoft LLC: پترزبورگ، روسیه، 2020؛ پ. 160. [ Google Scholar ]
- Canty، MJ تجزیه و تحلیل تصویر، طبقه بندی و تشخیص تغییر در سنجش از راه دور: با الگوریتم هایی برای ENVI/IDL و Python ، ویرایش سوم. CRC Press: Boca Raton، FL، USA، 2014. [ Google Scholar ]
- ریچاردز، جی. Jia, X. تجزیه و تحلیل تصویر دیجیتال سنجش از دور ; Springer: برلین/هایدلبرگ، آلمان، 1999. [ Google Scholar ]
- الیس، اس ال. تیلور، ام ال. شیله، ام. Letessier, TB تأثیر ارتفاع بر طبقهبندی زیستگاههای دریایی گرمسیری با استفاده از تصاویر پهپادهای بال ثابت و فرود در آب. از راه دور. سنس اکل. حفظ کنید. 2020 ، 2 ، 1-14. [ Google Scholar ] [ CrossRef ]
- دافی، جی پی؛ پرات، ال. اندرسون، ک. زمین، PE; Shutler، JD ارزیابی فضایی علفزارهای جزر و مدی با استفاده از سیستم های تصویربرداری نوری و یک پهپاد سبک وزن. استوار. ساحل. Shelf Sci. 2018 ، 200 ، 169-180. [ Google Scholar ] [ CrossRef ]
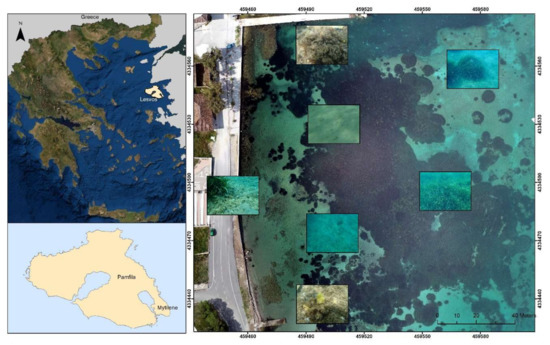
شکل 1. موقعیت منطقه مورد مطالعه در جزیره Lesvos، یونان ( سمت چپ ). تصاویر زیر آب از زیستگاه های دریایی در منطقه بر روی نقشه ارتوفوتو ( سمت راست ) قرار داده شده است.
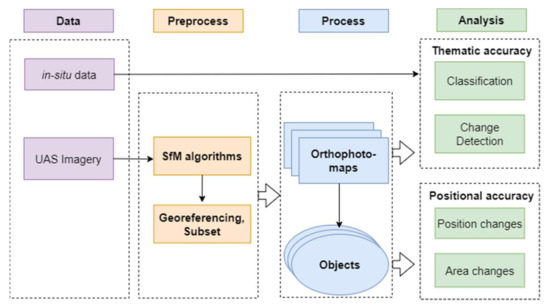
شکل 2. گردش کار روش.
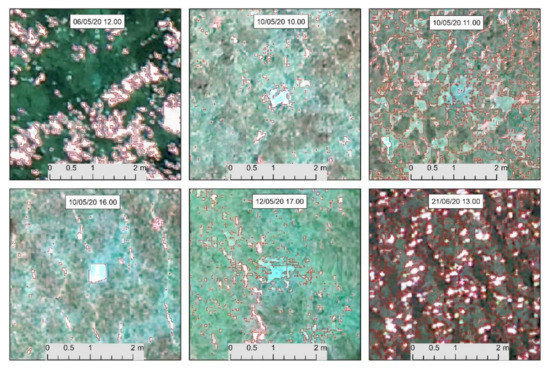
شکل 3. یک کاشی زیر آب همانطور که در نقشه های ارتوفتوی مختلف شناسایی می شود. ویژگی های قرمز مناطق جدا شده را با آستانه تطبیقی توصیف می کنند، مربع سفید مربوط به اندازه واقعی کاشی است. بهترین کاشی توصیف شده در تاریخ 10/05/20 ساعت 16:00 است زیرا سطح دریا آرام است و بستر دریا به خوبی روشن است.
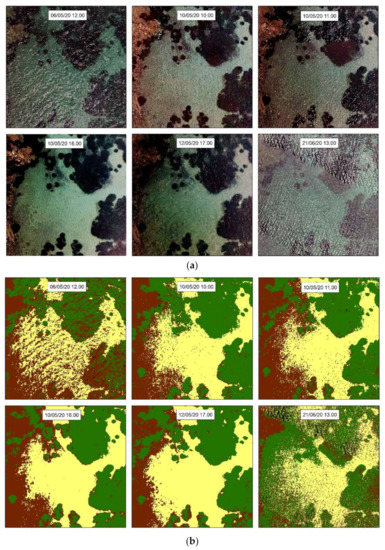
شکل 4. ( الف ) زیرمجموعههای نقشههای ارتوفتو به ترتیب زمانی زمانهای اکتساب، از سمت چپ بالا به پایین سمت راست. ( ب ) زیر مجموعههای تصاویر طبقهبندیشده در سه طبقه: علف دریایی به رنگ سبز، ماسه به رنگ زرد، بستر مخلوط در قهوهای.
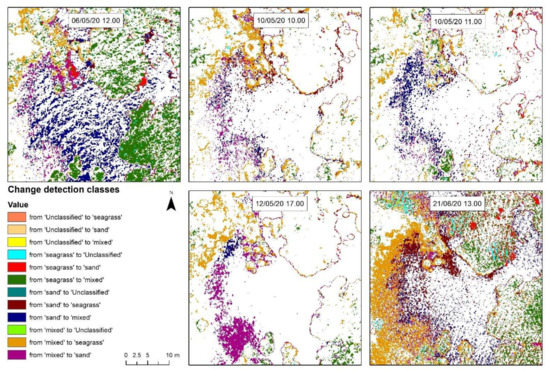
شکل 5. کلاس های تشخیص تغییر در زیر مجموعه های ارتوفوتو نقشه برای هر اکتساب. افسانه تغییرات (از کلاس به کلاس) را که از گردش کار تشخیص تغییر محاسبه شده است را در رنگ های مختلف نشان می دهد.
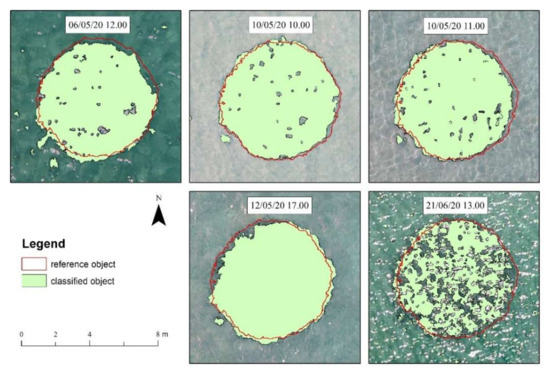
شکل 6. تفاوت در وسعت و شکل یک شی در هر تاریخ در مقایسه با شی مرجع ارائه شده در چند ضلعی قرمز.
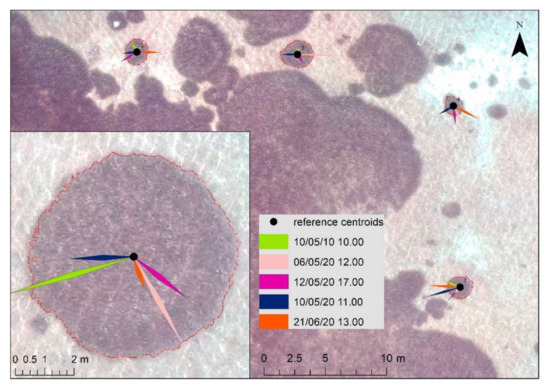
شکل 7. برآورد خطای موقعیت های مرکز. ویژگی ها در رنگ های مختلف نشان دهنده فواصل مرکز محاسبه شده از مرکز مرجع و جهت خطا هستند. ( جدول A5 ، ضمیمه A ). توجه: فواصل واقعی برای تجسم در پنج ضرب شده است.


بدون دیدگاه