

خلاصه
کلید واژه ها:
هارمونیک ها جنگل تصادفی ; درختان طبقه بندی و رگرسیون ; اهمیت متغیر
چکیده گرافیکی
1. معرفی
2. مواد و روشها
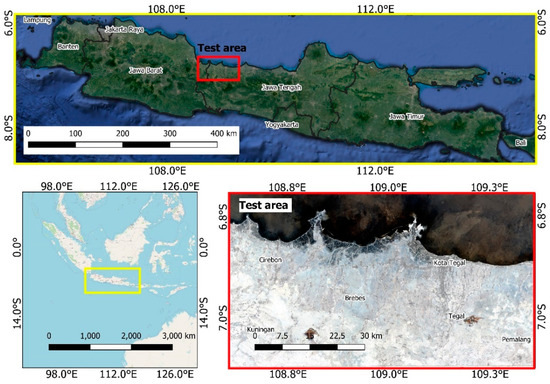
2.1. منطقه مطالعه
2.2. رگرسیون هارمونیک برای Landsat 8 OLI
روش SCS+C که توسط Soenen و همکاران توسعه یافته است. [ 47 ] توسعه ای از روش اصلی SCS [ 48 ] بود که از پارامتر شیب زمین استفاده می کرد. αزاویه اوج خورشیدی ( θو زاویه تابش ( i ). با این حال، روش SCS تمایل دارد در یک پیکربندی زمین خاص بیش از حد تخمین بزند، به طوری که ترکیب با پارامتر C از روش C-correction [ 49 ] معرفی شد. پارامتر C از نسبت شیب رگرسیون ( b ) و قطع ( a ) از رابطه خطی (معادله (1)) از بازتاب اصلاح نشده ( L ) با کسینوس زاویه تابش محلی ( i ) به دست آمده است (معادله (2)). سپس پارامتر C به عنوان مولفه افزودنی به رویکرد اصلی SCS معرفی شد (معادله (3)). جزئیات تصحیح SCS+C برای تولید بازتاب تصحیح شده توپوگرافی ( Ln ) را می توان به صورت زیر نوشت:
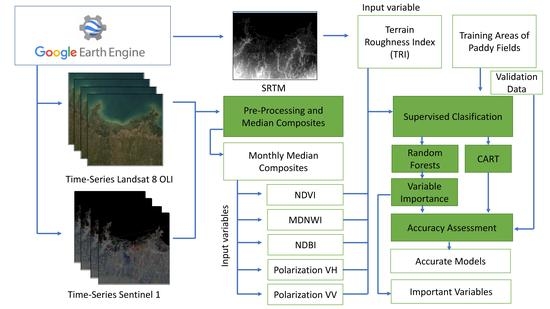
پس از اصلاح توپوگرافی، چندین شاخص طیفی مانند شاخص گیاهی نرمال شده (NDVI) (معادله (4))، شاخص اختلاف نرمال شده آب اصلاح شده (MNDWI) (معادله (5)) [50] و شاخص ایجاد اختلاف نرمال شده ( NDBI ) (معادله (6)) [ 51 ]، برای به دست آوردن اطلاعات زمانی مورد استفاده برای شناسایی مناطق آبی [ 52 ] محاسبه شد. باندهای طیفی زیر سبز، قرمز، مادون قرمز نزدیک (NIR) و موج کوتاه مادون قرمز (SWIR1) از Landsat 8 OLI در محاسبه استفاده شدند:
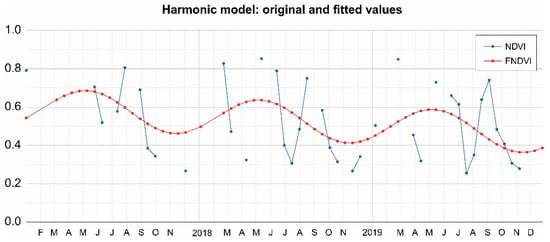
شاخصهای طیفی NDVI، MNDWI و NDBI از Landsat 8 OLI حاوی مقادیر گمشدهای به دلیل پوشش ابر و سایه ابری با استفاده از لایه ارزیابی کیفیت (QA) بودند، بنابراین پر کردن شکاف اضافی با استفاده از رگرسیون هارمونیک انجام شد. تابع رگرسیون هارمونیک یک تحلیل سری زمانی حوزه فرکانس است که امواج تناوبی/فصلی را از توابع سینوسی و کسینوس داده های سری زمانی اصلی بازسازی می کند [ 39 ، 53 ]. مدلهای هارمونیک برای محاسبه دادههای سری زمانی برازش ( Y ( t ))، بر اساس کلینتون [ 54 ] و آدامز و همکاران. [ 55 ]، را می توان در معادله (7) به صورت زیر بیان کرد:
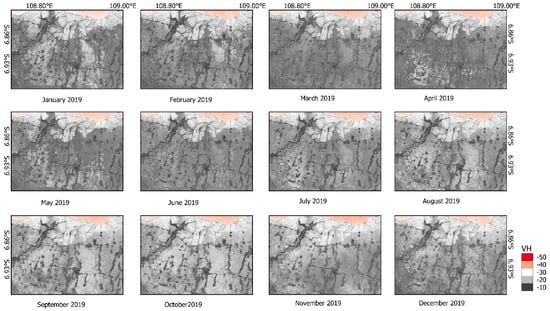
2.3. فرآیند سری زمانی Sentinel-1
در این مطالعه از آرشیو 2019 دادههای رادار با دیافراگم مصنوعی (SAR) Sentinel-1 Ground Range Detected (GRD) با وضوح فضایی 10 متر در GEE در مجموعه دادههای COPERNICUS/S1_GRD استفاده شد. دادههای بایگانی Sentinel-1 GRD در GEE تحت چندین فرآیند مانند حذف نویز حرارتی، کالیبراسیون رادیومتریک، تصحیح زمین با استفاده از دادههای DEM از SRTM یا ASTER GDEM برای دادههای عرض جغرافیایی بالاتر (بیش از 60 درجه شمالی و جنوبی) و گزارش ثبت میشوند. تبدیل پوسته پوسته شدن از ضریب پس پراکندگی (σدرجه)به دسی بل ( db ) با استفاده از معادله زیر (معادله (8)).
2.4. داده های جانبی
داده های جانبی در قالب داده های پیکربندی زمین برای طبقه بندی استفاده شد. تصور می شود گنجاندن پیکربندی زمین در فرآیند طبقه بندی باعث افزایش دقت طبقه بندی پوشش زمین می شود [ 58 ، 59 ]. دادههای ماموریت توپوگرافی رادار شاتل (SRTM) از پایگاه داده GEE (USGS/SRTMGL1_003) با اندازه پیکسل 30 متر در منطقه مورد مطالعه برای تولید دادههای شاخص ناهمواری زمین (TRI) استفاده شد. محاسبه TRI (معادله (9)) توسط رایلی و همکاران توسعه داده شد. [ 60 ]، و ناهمواری زمین را از اختلاف ارتفاع بین پیکسل مرکزی ( Xoo ) و پیکسلهای اطراف ( Xij) نشان میدهد.) در یک پنجره متحرک مشخص شده در تصویر شطرنجی ارتفاع اصلی.
2.5. طبقه بندی و ارزیابی دقت
3. نتایج
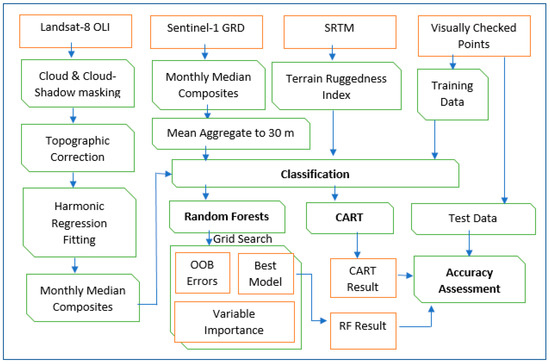
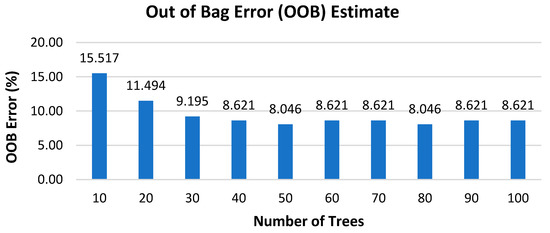
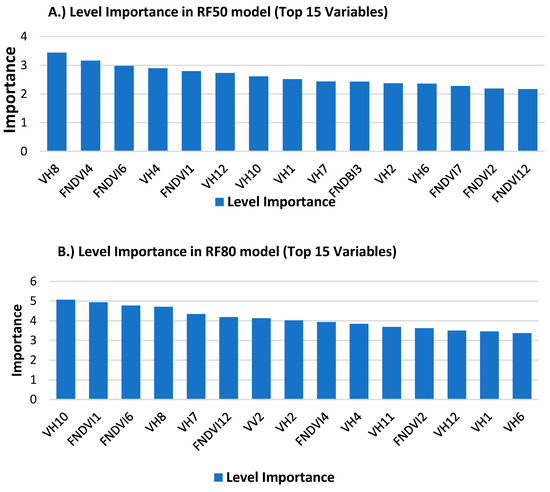
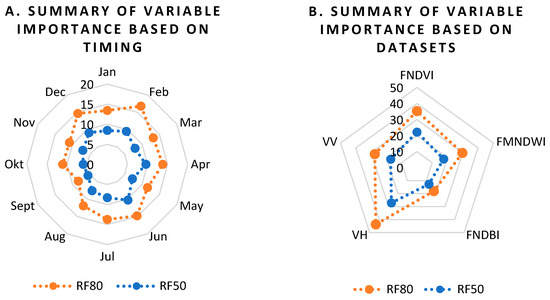
3.1. خطای خارج از کیسه (OOB) و اهمیت متغیر
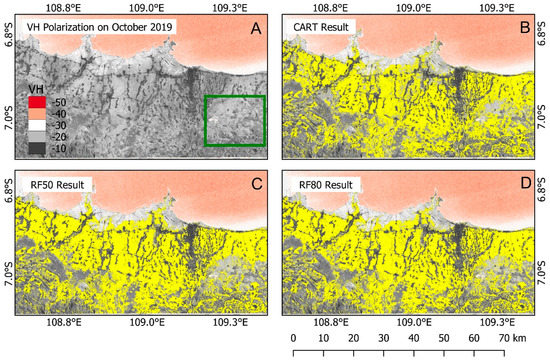
3.2. نتایج طبقه بندی و ارزیابی دقت
4. بحث
5. نتیجه گیری ها
پیوست اول

منابع
- وربورگ، پی اچ. بوما، جی. تغییر کاربری زمین تحت شرایط فشار جمعیت بالا: مورد جاوا. گلوب. محیط زیست چانگ. 1999 ، 9 ، 303-312. [ Google Scholar ] [ CrossRef ]
- Firman, T. مسائل عمده در توسعه زمین شهری اندونزی. سیاست کاربری زمین 2004 ، 21 ، 347-355. [ Google Scholar ] [ CrossRef ]
- دیمیاتی، م. میزونو، ک. کوبایاشی، س. Kitamura، T. تجزیه و تحلیل تغییر کاربری / پوشش زمین در اندونزی. بین المللی J. Remote Sens. 1996 , 17 , 931-944. [ Google Scholar ] [ CrossRef ]
- دیرمان، ای. سالنگ، ا. Sapiddin, A. حفاظت قانونی زمین کشاورزی غذایی برای بهبود امنیت غذایی در اندونزی. EES 2018 , 196 , 012047. [ Google Scholar ] [ CrossRef ]
- Wikkramatileke، R. مشکلات نقشه برداری کاربری زمین در مناطق استوایی. نمونه ای از سیلان جغرافیا 1959 ، 44 ، 79-95. [ Google Scholar ]
- پنگ، دی. Huete، AR؛ هوانگ، جی. وانگ، اف. Sun، H. تشخیص و برآورد الگوهای کشت مخلوط برنج شلتوک با داده های MODIS. بین المللی J. Appl. زمین Obs. Geoinf. 2011 ، 13 ، 13-23. [ Google Scholar ] [ CrossRef ]
- شیائو، ایکس. بولز، اس. فرلکینگ، اس. لی، سی. بابو، جی. سالاس، دبلیو. Moore III، B. نقشه برداری از کشاورزی برنج شالیزاری در جنوب و جنوب شرق آسیا با استفاده از تصاویر MODIS چند زمانی. سنسور از راه دور محیط. 2006 ، 100 ، 95-113. [ Google Scholar ] [ CrossRef ]
- شیائو، ایکس. بولز، اس. لیو، جی. ژوانگ، دی. فرلکینگ، اس. لی، سی. سالاس، دبلیو. Moore III، B. نقشه برداری از کشاورزی برنج شالیزاری در جنوب چین با استفاده از تصاویر MODIS چند زمانی. سنسور از راه دور محیط. 2005 ، 95 ، 480-492. [ Google Scholar ] [ CrossRef ]
- ساری، DK; اسم الله، آی.ح. سولاسدی، WN; Harto، AB تشخیص فنولوژی برنج در مزارع شالیزاری با الگوی کشت پیچیده با استفاده از دادههای سری زمانی MODIS. جی. ریاضی. فاندم علمی 2010 ، 42 ، 91-106. [ Google Scholar ]
- ساکاموتو، تی. یوکوزاوا، م. توریتانی، ح. شیبایما، م. ایشیتسوکا، ن. Ohno, H. یک روش تشخیص فنولوژی محصول با استفاده از داده های MODIS سری زمانی. سنسور از راه دور محیط. 2005 ، 96 ، 366-374. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. شیائو، ایکس. دونگ، جی. کو، دبلیو. جین، سی. Qin، Y. ژو، ی. وانگ، جی. منارگوئز، MA; بیرادار، سی. نقشه برداری مناطق کاشت برنج شالیزاری از طریق تحلیل سری زمانی داده های دمای سطح زمین و شاخص پوشش گیاهی MODIS. ISPRS J. Photogramm. Remote Sens. 2015 ، 106 ، 157-171. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Qin، Y. شیائو، ایکس. دونگ، جی. ژو، ی. زو، ز. ژانگ، جی. دو، جی. جین، سی. کو، دبلیو. وانگ، جی. و همکاران نقشه برداری منطقه کاشت برنج شلتوک در منطقه آب و هوای معتدل سرد از طریق تحلیل سری های زمانی Landsat 8 (OLI)، Landsat 7 (ETM+) و تصاویر MODIS. ISPRS J. Photogramm. Remote Sens. 2015 ، 105 ، 220-233. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- ژو، ی. شیائو، ایکس. Qin، Y. دونگ، جی. ژانگ، جی. کو، دبلیو. جین، سی. وانگ، جی. Li, X. نقشه برداری از منطقه کاشت برنج شالیزاری در مناطق همزیست تالاب برنج از طریق تجزیه و تحلیل تصاویر Landsat 8 OLI و MODIS. بین المللی J. Appl. زمین Obs. Geoinf. 2016 ، 46 ، 1-12. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، جی. شیائو، ایکس. Qin، Y. دونگ، جی. ژانگ، جی. کو، دبلیو. جین، سی. ژو، ی. ژانگ، ی. نقشه برداری از منطقه کاشت برنج شالیزار در مناطق کشت دوبل گندم-برنج از طریق ادغام تصاویر Landsat-8 OLI، MODIS و PALSAR. علمی Rep. 2015 , 5 , 10088. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- اشباخر، جی. پونگسریهادولچای، ا. کارنچاناسوتام، اس. رودپروم، سی. پائودیال، دی. Le Toan، T. ارزیابی داده های ERS-1 SAR برای نقشه برداری و نظارت بر محصول برنج. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور، IGARSS’95: سنجش از دور کمی برای علم و کاربردها، مرکز کنگره، Firenze، ایتالیا، 10-14 ژوئیه 1995; صص 2183–2185. [ Google Scholar ]
- ژانگ، ی. وانگ، سی. وو، جی. چی، جی. Salas، WA نقشه برداری برنج شلتوک با تصاویر چند زمانی ALOS/PALSAR در جنوب شرقی چین. بین المللی J. Remote Sens. 2009 ، 30 ، 6301-6315. [ Google Scholar ] [ CrossRef ]
- میاوکا، ک. مکی، م. سوزاکی، جی. هما، ک. نودا، ک. Oki، K. نقشهبرداری منطقه کاشت برنج با استفاده از مجموعههای کوچک دادههای SAR چند زمانی. IEEE Geosci. سنسور از راه دور Lett. 2013 ، 10 ، 1507-1511. [ Google Scholar ] [ CrossRef ]
- بزی، ح. بغدادی، ن. الحاج، م. زریبی، م. مین، DHT؛ ندیکومانا، ای. کورو، دی. Belhouchette، H. نقشه برداری برنج شلتوک با استفاده از سری زمانی Sentinel-1 SAR در Camargue، فرانسه. Remote Sens. 2019 ، 11 ، 887. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کونتگیس، سی. وارن، ام اس؛ Skillman، SW; چارتراند، آر. دادههای سری زمانی Moody، DI Leveraging Sentinel-1 برای نقشهبرداری پوشش زمین کشاورزی و استفاده از زمین در مناطق استوایی. در مجموعه مقالات نهمین کارگاه بین المللی در مورد تجزیه و تحلیل تصاویر سنجش از دور چند زمانی (MultiTemp)، بروژ، بلژیک، 27-29 ژوئن 2017؛ صص 1-4. [ Google Scholar ]
- سینگا، م. دونگ، جی. ژانگ، جی. Xiao، X. نقشههای برنج شالیزاری با وضوح بالا در بنگلادش مستعد ابری و شمال شرق هند با استفاده از دادههای Sentinel-1. علمی داده 2019 ، 6 ، 1-10. [ Google Scholar ] [ CrossRef ]
- لاسکو، ک. Vadrevu، KP; Tran، VT; عدالت، سی. نقشه برداری برنج شالیزاری دو و یک محصول با Sentinel-1A در مقیاس های فضایی و قطبش های مختلف در هانوی، ویتنام. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2018 , 11 , 498–512. [ Google Scholar ] [ CrossRef ]
- نگوین، دی بی؛ Wagner، W. نقشه برداری زمین زراعی برنج اروپایی با داده های Sentinel-1: مطالعه موردی منطقه مدیترانه. Water 2017 , 9 , 392. [ Google Scholar ] [ CrossRef ]
- میناسنی، بی. شاه، RM; چه سو، ن. عارف، ج. Indra Setiawan، B. نقشه برداری و نظارت خودکار بر میزان برنج، الگوهای کشت و مراحل رشد در جنوب شرقی آسیا با استفاده از سری زمانی Sentinel-1 در یک پلت فرم موتور Google Earth. Remote Sens. 2019 ، 11 ، 1666. [ Google Scholar ]
- Mansaray, LR; هوانگ، دبلیو. ژانگ، دی. هوانگ، جی. لی، جی. نقشه برداری مزارع برنج در شهری شانگهای، جنوب شرقی چین، با استفاده از مجموعه داده Sentinel-1A و Landsat 8. Remote Sens. 2017 , 9 , 257. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- توربیک، ن. چاودری، دی. سالاس، دبلیو. Qi، J. نظارت بر کشاورزی برنج در سراسر میانمار با استفاده از سری زمانی Sentinel-1 با کمک Landsat-8 و PALSAR-2. Remote Sens. 2017 , 9 , 119. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Mansaray, LR; وانگ، اف. هوانگ، جی. یانگ، ال. کانو، AS دقت ماشین بردار پشتیبان و جنگل تصادفی در نقشه برداری برنج با مجموعه داده های Sentinel-1A، Landsat-8 و Sentinel-2A. Geocarto Int. 2020 ، 35 ، 1088-1108. [ Google Scholar ] [ CrossRef ]
- Onojeghuo، AO; بلکبرن، GA؛ وانگ، کیو. اتکینسون، PM؛ کیندرد، دی. Miao، Y. نقشهبرداری از مزارع برنج شالیزاری با استفاده از الگوریتمهای یادگیری ماشین برای دادههای Sentinel-1A و Landsat چند زمانی. بین المللی J. Remote Sens. 2018 ، 39 ، 1042–1067. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اینو، اس. ایتو، ا. Yonezawa، C. نقشه برداری شالیزارها در ژاپن با استفاده از سری زمانی Sentinel-1 SAR تکمیل شده توسط Sentinel-2 Images در موتور Google Earth. Remote Sens. 2020 , 12 , 1622. [ Google Scholar ] [ CrossRef ]
- کای، ی. لین، اچ. ژانگ، ام. نقشه برداری برنج شالیزاری به روش جنگل تصادفی مبتنی بر شی با استفاده از داده های سری زمانی Sentinel-1/Sentinel-2. Adv. Space Res. 2019 ، 64 ، 2233-2244. [ Google Scholar ] [ CrossRef ]
- گولیک، ن. هنچر، م. دیکسون، ام. ایلیوشچنکو، اس. تاو، دی. Moore, R. Google Earth Engine: تجزیه و تحلیل جغرافیایی در مقیاس سیاره ای برای همه. سنسور از راه دور محیط. 2017 ، 202 ، 18-27. [ Google Scholar ] [ CrossRef ]
- کومار، ال. برنامههای Mutanga، O. Google Earth Engine از بدو تأسیس: استفاده، روندها و پتانسیل. Remote Sens. 2018 , 10 , 1509. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تمیمینیا، اچ. صالحی، ب. مهدیان پری، م. کواکنبوش، ال. عادلی، س. Brisco، B. Google Earth Engine برای برنامه های کاربردی داده های جغرافیایی بزرگ: یک متاآنالیز و بررسی سیستماتیک. ISPRS J. Photogramm. Remote Sens. 2020 , 164 , 152–170. [ Google Scholar ] [ CrossRef ]
- دونگ، جی. شیائو، ایکس. منارگوئز، MA; ژانگ، جی. Qin، Y. تاو، دی. بیرادار، سی. Moore III، B. نقشه برداری از منطقه کاشت برنج شالیزاری در شمال شرقی آسیا با تصاویر Landsat 8، الگوریتم مبتنی بر فنولوژی و موتور Google Earth. سنسور از راه دور محیط. 2016 ، 185 ، 142-154. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کونتگیس، سی. اشنایدر، آ. Ozdogan، M. نقشه برداری وسعت و تشدید شالیزار برنج در دلتای رودخانه مکونگ ویتنامی با پشته های زمانی متراکم از داده های Landsat. سنسور از راه دور محیط. 2015 ، 169 ، 255-269. [ Google Scholar ] [ CrossRef ]
- ویس، دی جی; اتکینسون، PM؛ بهات، اس. مپین، بی. هی، SI; Gething، PW یک رویکرد موثر برای پر کردن شکاف در مقیاس قاره ای سنجش از دور سری های زمانی. ISPRS J. Photogramm. Remote Sens. 2014 ، 98 ، 106-118. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کنداسامی، س. بارت، اف. ورگر، آ. Neveux، P. ویس، ام. مقایسه روشهای هموارسازی و پر کردن شکاف سریهای زمانی مشاهدات سنجش از راه دور – کاربرد در محصولات MODIS LAI. Biogeosciences 2013 ، 10 ، 4055-4071. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- روی، DP; Yan, L. مدلسازی سری زمانی محصول مبتنی بر Landsat قوی. سنسور از راه دور محیط. 2020 ، 238. [ Google Scholar ] [ CrossRef ]
- رورینک، جی. مننتی، م. Verhoef, W. بازسازی کامپوزیت های NDVI بدون ابر با استفاده از تحلیل فوریه سری های زمانی. بین المللی J. Remote Sens. 2000 ، 21 ، 1911-1917. [ Google Scholar ] [ CrossRef ]
- بروکس، EB; توماس، VA; Wynne، RH; Coulston، JW برازش منحنی چندزمانی: یک رویکرد سری فوریه برای مشکل دادههای گمشده در تحلیل سنجش از دور. IEEE Trans. Geosci. Remote Sens. 2012 , 50 , 3340–3353. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیو، جی. هیسکانن، جی. مائدا، EE; Pellikka، PK تشخیص منطقه سوخته بر اساس سری زمانی Landsat در ساواناهای جنوب بورکینافاسو. بین المللی J. Appl. زمین Obs. Geoinf. 2018 ، 64 ، 210-220. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ونکاتاپا، م. ساساکی، ن. Shrestha، RP; تریپاتی، NK; ما، H.-O. تعیین آستانه پوشش گیاهی برای ارزیابی تغییرات کاربری و کاربری زمین در کامبوج با استفاده از پلت فرم محاسبات ابری موتور Google Earth. Remote Sens. 2019 ، 11 ، 1514. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دروین، جی.ام. توماس، VA; Wynne، RH; کولستون، جی دبلیو. Liknes، GC; بندر، اس. بلین، م. بروکس، EB; روفناخت، بی. Benton, R. برآورد پوشش تاج درخت با استفاده از ضرایب رگرسیون هارمونیک به دست آمده از داده های چند زمانی Landsat. بین المللی J. Appl. زمین Obs. Geoinf. 2020 ، 86 ، 101985. [ Google Scholar ] [ CrossRef ]
- لندمن، تی. عیدمن، دی. کورنیش، ن. فرانکه، جی. Siebert, S. بهینه سازی هارمونیک ها از داده های سری زمانی Landsat: مورد نقشه برداری کشاورزی دیم و آبی در زیمبابوه. سنسور از راه دور Lett. 2019 ، 10 ، 1038–1046. [ Google Scholar ] [ CrossRef ]
- سورجاسا، دی. گامبیرا سعید، ا. آریفین، بی. جی، اف. تحلیل زنجیره تامین برنج اندونزیایی و مدل انتخاب تامین کننده. بین المللی J. Inf. اتوبوس. مدیریت 2013 ، 5 ، 198. [ Google Scholar ]
- Febrina، WD Determinants of Paddy Field Conversion در جاوا 1995-2013. J. Home Aff. دولت 2017 ، 9 ، 1-13. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پورتینگا، ا. تنسون، ک. شاپیرو، ا. انکوین، کیو. سان آنگ، ک. چشتی، ف. Saah, D. نقشه برداری مزارع در میانمار با ترکیب داده های landsat-8، sentinel-2 و sentinel-1 همراه با کمی سازی سیستماتیک خطا. Remote Sens. 2019 , 11 , 831. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Soenen، SA; Peddle, DR; Coburn، CA SCS+ C: تصحیح توپوگرافی سایبان-سنسور خورشیدی اصلاح شده در زمین جنگلی. IEEE Trans. Geosci. Remote Sens. 2005 ، 43 ، 2148-2159. [ Google Scholar ] [ CrossRef ]
- گو، دی. گیلسپی، الف. نرمال سازی توپوگرافی تصاویر Landsat TM از جنگل بر اساس هندسه زیرپیکسلی خورشید-سایبان-حسگر. سنسور از راه دور محیط. 1998 ، 64 ، 166-175. [ Google Scholar ] [ CrossRef ]
- تیلت، پ. گیندون، بی. Goodenough, D. در مورد تصحیح شیب – جنبه داده های اسکنر چندطیفی. می توان. J. Remote Sens. 1982 ، 8 ، 84-106. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Han-Qiu، X. مطالعه ای در مورد استخراج اطلاعات بدنه آبی با شاخص تغییر نرمال شده آب اصلاح شده (MNDWI). J. Remote Sens. 2005 ، 5 ، 589-595. [ Google Scholar ]
- ژا، ی. گائو، جی. Ni، S. استفاده از شاخص ایجاد تفاوت نرمال شده در نقشه برداری خودکار مناطق شهری از تصاویر TM. بین المللی J. Remote Sens. 2003 , 24 , 583-594. [ Google Scholar ] [ CrossRef ]
- بنبهریا، ز. سباری، من. حاجی، ح. Smiej، MF نقشه برداری خودکار مناطق آبیاری شده در زمینه مدیترانه با استفاده از تصاویر سری زمانی Landsat 8 و الگوریتم جنگل تصادفی. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور IGARSS IEEE، والنسیا، اسپانیا، 22 تا 27 ژوئیه 2018؛ صفحات 7986-7989. [ Google Scholar ]
- راماناتان، ک. آنموژی، م. جورج، اس. آناندان، س. ویرآقاوان، ب. Naumova، EN ارزیابی تغییرات فصلی با رگرسیون هارمونیک: محل اقامت برای قله های تیز. بین المللی جی. محیط زیست. Res. بهداشت عمومی 2020 ، 17 ، 1318. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کلینتون، آزمایشگاه N. 6: تجزیه و تحلیل سری های زمانی. در آزمایشگاه کد سنجش از دور مقدماتی ; آزمایشگاه تجزیه و تحلیل جغرافیایی، دانشگاه سانفرانسیسکو: سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 2019. [ Google Scholar ]
- آدامز، بی. آیورسون، ال. متیوز، اس. پیترز، ام. پراساد، ع. Hix، D. نقشه برداری ترکیب جنگل با سری زمانی Landsat: ارزیابی کامپوزیت های فصلی و رگرسیون هارمونیک. Remote Sens. 2020 , 12 , 610. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ویلسون، بی تی; نایت، جی اف. مک رابرتس، رگرسیون هارمونیک RE سری های زمانی Landsat برای مدل سازی ویژگی ها از داده های موجودی جنگل ملی. ISPRS J. Photogramm. Remote Sens. 2018 ، 137 ، 29–46. [ Google Scholar ] [ CrossRef ]
- نگوین، MD؛ Baez-Villanueva، OM; Bui، DD; نگوین، PT; Ribbe، L. هماهنگی Landsat و Sentinel 2 برای پایش محصول در مناطق مستعد خشکسالی: مطالعات موردی Ninh Thuan (ویتنام) و Bekaa (لبنان). Remote Sens. 2020 , 12 , 281. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فهسی، ع. Tsegaye، T. تادسه، دبلیو. Coleman, T. ترکیب مدل های رقومی ارتفاع با داده های Landsat-TM برای بهبود دقت طبقه بندی پوشش زمین. برای. Ecol. مدیریت 2000 ، 128 ، 57-64. [ Google Scholar ] [ CrossRef ]
- سها، ع. آرورا، م. کساپلویکس، ای. گوپتا، آر. طبقه بندی پوشش زمین با استفاده از تصویر IRS LISS III و DEM در یک زمین ناهموار: مطالعه موردی در هیمالیا. Geocarto Int. 2005 ، 20 ، 33-40. [ Google Scholar ] [ CrossRef ]
- رایلی، اس جی. دی گلوریا، SD؛ الیوت، R. ایندکس که ناهمگنی توپوگرافی را کمی می کند. Intermt. J. Sci. 1999 ، 5 ، 23-27. [ Google Scholar ]
- بریمن، L. جنگل های تصادفی. ماخ فرا گرفتن. 2001 ، 45 ، 5-32. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بریمن، ال. تخمین خارج از کیسه. 1996. در دسترس آنلاین: https://www.stat.berkeley.edu/~breiman/OOBestimation.pdf (در 25 سپتامبر 2020 قابل دسترسی است).
- بریمن، ال. فریدمن، جی. اولشن، ر. Stone, C. طبقه بندی و رگرسیون درختان ; چپمن و هال/CRC: بوکا راتون، فلوریدا، ایالات متحده آمریکا، 1984. [ Google Scholar ]
- بل، ال. آلارد، دی. لوران، جی. چدادی، ر. بار-هن، A. الگوریتم سبد خرید برای داده های مکانی: کاربرد در داده های زیست محیطی و اکولوژیکی. محاسبه کنید. آمار داده آنال. 2009 ، 53 ، 3082-3093. [ Google Scholar ] [ CrossRef ]
- کوئنزر، سی. Knauer، K. سنجش از دور مناطق کشت برنج. بین المللی J. Remote Sens. 2013 ، 34 ، 2101-2139. [ Google Scholar ] [ CrossRef ]
- ژائو، اس. لیو، ایکس. دینگ، سی. لیو، اس. وو، سی. وو، LJG; سنجش، R. نقشه برداری از شالیزارهای برنج در مناظر پیچیده با شبکه های عصبی کانولوشنال و معیارهای فنولوژیکی. گیسی. Remote Sens. 2020 , 57 , 37–48. [ Google Scholar ] [ CrossRef ]
- ندیکومانا، ای. هو تانگ مین، دی. بغدادی، ن. کورو، دی. Hossard، L. شبکه عصبی بازگشتی عمیق برای طبقه بندی کشاورزی با استفاده از SAR Sentinel-1 چند زمانی برای Camargue، فرانسه. Remote Sens. 2018 , 10 , 1217. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کریستومو د کاسترو فیلهو، اچ. آبیلیو د کاروالیو جونیور، او. فریرا د کاروالیو، OL; پوزوبون دی بم، پ. دوس سانتوس دی مورا، آر. اولینو دو آلبوکرکی، آ. رزا سیلوا، سی. Guimarães Ferreira، PH; فونتس گیماراس، آر. Trancoso Gomes، RA Rice Crop Detection با استفاده از مدلهای LSTM، Bi-LSTM و یادگیری ماشین از سری زمانی Sentinel-1. Remote Sens. 2020 , 12 , 2655. [ Google Scholar ] [ CrossRef ]
- پلتیه، سی. وب، GI; پتیژان، اف. شبکه عصبی کانولوشنال زمانی برای طبقه بندی سری های زمانی تصاویر ماهواره ای. Remote Sens. 2019 , 11 , 523. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]


بدون دیدگاه