

ترکیب مدل های رقومی ارتفاع برای بهبود تفاسیر هیدرولوژیکی
بهبود دقت ارتفاع دیجیتال برای کاهش خطاهای اشتقاق هیدروتوپوگرافی مربوط به، به عنوان مثال، جهت جریان، مرزهای حوضه، شبکه های کانال، فرورفتگی ها، پیش بینی سیل، و زهکشی خاک ضروری است. این مقاله نشان میدهد که چگونه افزایش این دقت از طریق همجوشی مدل ارتفاعی دیجیتال (DEM) و استفاده از لایههای ارتفاعی مشتقشده از LiDAR برای تست انطباق و اعتبار سنجی بهبود مییابد. این نمایش برای استان نیوبرانزویک (NB، کانادا) با استفاده از پنج منبع DEM در سطح استان (SRTM 90 متر؛ SRTM 30 متر؛ ASTER 30 متر؛ CDED 22 متر؛ NB-DEM 10 متر) و پنج منبع DEM انجام می شود. فرآیند مرحله ای که از طریق کالیبراسیون و اعتبار سنجی، طرح ریزی مجدد این DEM ها را هدایت می کند و در عین حال تفاوت های ارتفاعی آنها را نسبت به DEM های زمین برهنه گرفته شده توسط LiDAR به حداقل می رساند. این تلاش اختلاف ارتفاع غیر LiDAR به LiDAR حاصل را به میزان دو برابر کاهش داد، حداقل انطباق فاصله بین کانال های جریان غیر LiDAR و LiDAR مشتق شده از LiDAR را به 10 ± متر در 8.5 بار از 10 کاهش داد، و غیر از 10 را کاهش داد. درصد ناحیه مرطوب LiDAR از مثبت کاذب از 59٪ تا 49٪، و از منفی کاذب از 14٪ به 7٪. در حالی که این کاهش ها اندک هستند، با این وجود نه تنها با لایه های داده های هیدروگرافی موجود در حال حاضر که در مورد مکان های رودخانه و منطقه مرطوب اطلاع می دهند، مطابقت دارند، بلکه این لایه های داده را با مکان یابی جامع کانال های جریان و مناطق مرطوب قبلاً نقشه برداری نشده، در سراسر استان گسترش می دهند. و درصد ناحیه مرطوب غیر LiDAR در موارد مثبت کاذب را از 59% به 49% و در موارد منفی کاذب از 14% به 7% کاهش داد. در حالی که این کاهش ها اندک هستند، با این وجود نه تنها با لایه های داده های هیدروگرافی موجود در حال حاضر که در مورد مکان های رودخانه و منطقه مرطوب اطلاع می دهند، مطابقت دارند، بلکه این لایه های داده را با مکان یابی جامع کانال های جریان و مناطق مرطوب قبلاً نقشه برداری نشده، در سراسر استان گسترش می دهند. و درصد ناحیه مرطوب غیر LiDAR در موارد مثبت کاذب را از 59% به 49% و در موارد منفی کاذب از 14% به 7% کاهش داد. در حالی که این کاهش ها اندک هستند، با این وجود نه تنها با لایه های داده های هیدروگرافی موجود در حال حاضر که در مورد مکان های رودخانه و منطقه مرطوب اطلاع می دهند، مطابقت دارند، بلکه این لایه های داده را با مکان یابی جامع کانال های جریان و مناطق مرطوب قبلاً نقشه برداری نشده، در سراسر استان گسترش می دهند.

کلید واژه ها
فیوژن DEM ، کالیبراسیون مبتنی بر LiDAR ، تفسیرهای هیدروگرافی ، شبکه جریان ، نقشه برداری مناطق مرطوب
1. مقدمه
تقاضای فزاینده ای برای مجموعه داده های با وضوح بالا وجود دارد که سطح زمین را نشان می دهد زیرا فناوری و کاربردهای مدل سازی فضایی پیشرفت می کند. در میان این مجموعه دادهها، مدلهای ارتفاعی دیجیتال (DEMs) هستند، بهعنوان مثال، مجموعه دادههای شبکهای نشاندهنده تغییرات مستمر ارتفاع در سراسر مناظر در هر دو گستره محلی و جهانی [ 1 ] [ 2 ]. به نوبه خود، DEM برای تجسم فضایی و مدلسازی ویژگیهای توپوگرافی، ژئومورفولوژیکی و هیدرولوژیکی (به عنوان مثال، شیبها، فرسایش خاک، مرزهای حوضه، شبکههای رودخانهها و رودخانهها، و دبی جریان) استفاده میشوند [ 3 ] [ 4 ] [ 5 ] [ 6 ]] . در این رابطه، دقت و تفکیک ارتفاع DEM بر اساس تفاوت در حالت گرفتن ارتفاع، پردازش، درونیابی نقطه به نقطه و زمان گرفتن [ 7 ] [ 8 ] [ 9 ] [ 10 ] [ 11 ] متفاوت است. از این رو، شیب و تفسیرهای DEM هیدرولوژیکی مانند مرزهای حوضه و کانال های جریان مشخص شده توسط DEM می توانند در جزئیات قابل توجهی متفاوت باشند [ 12 ] [ 13 ] [ 14 ].
از نظر اکتساب و در دسترس بودن، DEM با منشأهای مختلف به صورت آزادانه در دسترس هستند [ 8 ] [ 10 ] [ 15 ] – [ 23 ]. برخی از این موارد در جدول 1 [ 19 ] [ 20 ] [ 21 ] [ 22 ] [ 23]، به عنوان مثال، ماموریت توپوگرافی رادار شاتل (SRTM90 و SRTM30 DEM) و رادیومتر گسیل گرمایی و انعکاس پیشرفته فضایی (ASTER DEM). اینها برگرفته از ماهواره و جهانی هستند. همچنین فهرست شده است: DEM موجود در سطح ملی برای کانادا، به عنوان مثال، مدل دیجیتالی ارتفاعی کانادا (CDED، ایجاد شده از خطوط ارتفاعی و ارتفاعات نقطه ای)، و یک مثال استانی، به عنوان مثال، DEM نیوبرانزویک (NB-DEM) که از طریق استریو به دست آمده است. فتوگرامتری همچنین به طور فزاینده ای DEM های تشخیص نور و محدوده (LiDAR) تولید شده از داده های ابر نقطه ای از طریق اسکن نور لیزری هوا و طبقه بندی برگشت پالس [ 24 ] در دسترس هستند.
1) https://www.snb.ca/gdam-igec/e/2900e_1c.asp ، 2) https://earthexplorer.usgs.gov/ 3) https://geogratis.gc.ca/site/eng/ استخراج/ ، 4) https://www.snb.ca/geonb1/e/DC/catalogue-E.asp
DEM های غیر LiDAR) بر اساس روش، دقت و وضوح [ 21 ] [ 24 ] [ 25 ] [ 26 ] [ 27 ] متفاوت است. DEM های غیر LiDAR مانند SRTM30 و STRM90 بر اساس بازتاب های سطحی هستند، در حالی که ASTER، CDED، NB-DEM نشان دهنده ارتفاعات زمین برهنه هستند. در این رابطه، اولی به مدلهای سطح دیجیتال (DSM) اشاره میکند، در حالی که دومی به مدلهای دیجیتال ارتفاع (DEMs) اشاره میکند. هر دو زیر مجموعه مدل های دیجیتال زمین (DTMs) هستند [ 5 ]. دادههای ابر نقطه LIDAR را میتوان برای تولید DSM و همچنین DEM از طریق تعیین اختلاف ارتفاع بین اولین و آخرین بازده پالس لیزر، معمولاً با دقت عمودی 0.15 ± متر [ 24 ] استفاده کرد.
همه DEM ها را می توان برای ایجاد تفاسیر هیدروتوپوگرافی مربوط به، به عنوان مثال، جهت جریان، تجمع جریان، شبکه های کانال جریان، مناطق و مرزهای حوضه شیب دار، محل فرورفتگی ها، و وسعت مناطق در معرض سیل و خاک فقیر استفاده کرد. زه کشی. با این حال، این تفاسیر تحت تأثیر دقت DEM [ 28 ] – [ 34 ] است] . به عنوان مثال، 10 تا 20 متر DEM برای تعیین اتصالات کانال جریان بدون درز در سراسر جاده ها ترجیح داده می شود، اما منجر به دست کم گرفتن شیب شیب به خصوص در امتداد خطوط ساحلی، بریدگی جاده ها و دره های جریان عمیق می شود. DEM های LiDAR با وضوح بالا می توانند هر دو هدف را انجام دهند، با استفاده از آنها در بهترین وضوح خود برای تعیین جایی که جاده ها به طور بالقوه جریان کانال را مسدود می کنند و بنابراین باید از آنها عبور کرد، یا جایی که DEM ها نیاز به نمونه برداری مجدد به سمت وضوح های درشت تر برای اتصال تقریباً کانال های جریان دارند. عبور از موانع بدون نقض در مقابل، تلاشها برای افزایش وضوح DEMهای غیر LiDAR مشتقشده از فتوگرامتری از طریق درونیابی مجدد به تنهایی اطلاعات بیشتری را تولید نمیکنند، بلکه مصنوعات DEM مانند “ridging” را معرفی میکنند [ 35 ].
چندین روش برای کاهش خطاهای DEM عمودی و جانبی از طریق همجوشی در دسترس است. اینها شامل طرح ریزی مجدد DEM، نمونه برداری مجدد، درون یابی مجدد، ادغام، و اجرای هیدرولوژیکی است (به عنوان مثال، [ 36 ] [ 37 ] [ 38 ] [ 39 ] [ 40 ]). به عنوان مثال، وسعت “ریدینگ” را می توان از طریق ویرایش DEM از طریق تراکم تصادفی قلع [ 22 ] و/یا فیلتر فضایی [ 41 ] [ 42 ] کاهش داد. لودلینگ و همکاران [ 43 ] یک تکنیک DEM fill را برای پر کردن فضای خالی SRTM با داده های ASTER اعمال کرد. ادغام DEM ها به منظور کاهش خطای DEM توسط [ 39 ] بررسی شد] . جدای از همجوشی DEM، اجرای هیدرولوژیکی ([ 44 ] [ 45 ] [ 46 ] [ 47 ]) برای هدایت الگوریتمهای جهت جریان و انباشت جریان مبتنی بر DEM به سمت جریانها، رودخانهها، دریاچهها و خطوط ساحلی مورد نیاز است. این اعمال با (i) کاهش ارتفاع تمام پیکسلهای مرجع رودخانه و آبهای آزاد به پایینترین ارتفاعات محلهشان انجام میشود، و (ii) اطمینان از اینکه همه نهرها و رودخانهها به طور یکنواخت در ارتفاع به سمت نزدیکترین خطوط ساحلی خود سقوط میکنند. این اجبار به طور کلی برای DEM های غیر LiDAR اعمال می شود، اما تنظیمات هیدروتوپوگرافی برای LiDAR-DEM های با وضوح بالا نیز مورد نیاز است تا مصنوعات را به دلیل بازگشت پالس لیزر کم از سطوح آب آزاد مانند دریاچه ها، رودخانه ها و سواحل حذف کنند.
هدف این مقاله نشان دادن این است که چگونه یک کاهش سیستماتیک غیر LiDAR به LiDAR در تفاوتهای ارتفاعی از طریق همجوشی غیرLIDAR DEM در وضوح 10 متر منجر به بهبود تفسیر هیدرولوژیکی DEM ایجاد میشود. این به طور جامع برای استان نیوبرانزویک به عنوان مطالعه موردی انجام شد. میزان پیشرفت های تفسیر مبتنی بر DEM در زیر از نظر موارد زیر تحلیل می شود:
1) همجوشی غیر LIDAR DEM.
2) استفاده از داده های ارتفاع 1 متری LiDAR زمین برهنه به عنوان DEM مرجع.
3) آزمایش انطباق نزدیکترین فاصله کانالهای جریان غیر LiDAR در مقابل LiDAR مشتق شده.
4) ارزیابی مثبت کاذب و منفی کاذب در شاخص های نقشه برداری عمق به آب (DTW [ 32 ]) برای هر DEM.
2. روش شناسی
استان نیوبرانزویک که در شرق کانادا واقع شده و مساحتی به وسعت 7,282,014 هکتار را در بر می گیرد، مجموعه ای از ژئومورفولوژی ها و شکل های زمین متنوع را در بر می گیرد و دارای پوشش های غیر LiDAR DEM و شبکه هیدروگرافی در سراسر استان است که از سرویس نیوبرانزویک، GeoNB و کاتالو داده LiDAR در دسترس است. پوشش های بخش هایی از استان ( شکل 1 ، جدول 1 ). SRTM و ASTER DEM از طریق برنامه کاربردی Earth Explorer شعبه زمین شناسی ایالات متحده به دست آمد. داده های CDED از منابع طبیعی کانادا به دست آمده است. یک فرآیند پنج مرحله ای نیمه خودکار ArcGIS 10.1 ( شکل 2 ) به شرح زیر توسعه داده شد:

شکل 1 . پوشش های DEM LiDAR (~11٪) برای بهبود DEM های غیر LiDAR در سراسر نیوبرانزویک از طریق یک فرآیند 5 مرحله ای استفاده می شود. همچنین نشان داده شده است: آخرین خرید LiDAR-DEM برای نیوبرانزویک، پوشش LiDAR برای بهینهسازی و اعتبارسنجی فرآیند، و خط اسکن (سبز)، که برای نشان دادن تفاوتهای ارتفاعی مرتبط با هر DEM غیر LiDAR استفاده میشود. زمینه: NB-DEM سایه دار تپه. منبع LiDAR-DEM: https://www.snb.ca/geonb1/e/DC/DTM.asp.

شکل 2 . یک گردش کار 5 مرحله ای با هدف یکسان سازی ارجاع و وضوح فضایی، و کاهش تفاوت های ارتفاعی غیر LiDAR به LiDAR در ارتفاعات زمین برهنه ایجاد شده است. تکنیک ترجیحی برای هر مرحله با رنگ قرمز مشخص شده است.
مرحله 1. همگنی بین DEM های غیر LiDAR از نظر مرجع فضایی و وضوح از طریق طرح ریزی مجدد تضمین شد. همه کاشیهای DEM منبع باز دانلود شده در پوششهای بدون درز ترکیب شدند و مجدداً (CSRS NAD 1983 New Brunswick Stereographic) به سه روش (دو خطی، مکعبی، نزدیکترین) برای سه اندازه سلول (10 متر، پیشفرض، 90 متر) طراحی شدند.
مرحله 2. لایههای داده مرحله 1 که در اندازه سلولهای 8، 10، 12، 14، 16، 18، 20 متری نمونهگیری مجدد شدهاند، بهطور تصادفی نمونهبرداری شدند تا یک فایل شکل نقطهای حاوی (n = 86915) برای هر لایه ایجاد شود.
مرحله 3. نقاط فایل شکل مرحله 2 با استفاده از سه روش درون یابی (وزن با فاصله معکوس، کریجینگ، نزدیکترین همسایه) با استفاده از سه اندازه سلول (5، 10، 20 متر) دوباره درون یابی شدند.
مرحله 4. بهترین تطابق غیر LiDAR به LiDAR از طریق ایجاد شد
1) تعیین اینکه کدام یک از لایه های داده تولید شده در مرحله 3 دارای کمترین اختلاف ارتفاع غیر LiDAR نسبت به LiDAR بر اساس منبع DEM (از طریق آمار اولیه و مقایسه باکس پلات) است. برای این منظور، LiDAR-DEM زمین برهنه، با آخرین نقاط بازگشتی که در اصل به 1 متر درونیابی شده بود، مجدداً با وضوح 10 متر نمونه برداری شد.
2) تعیین اینکه کدام ترکیب و وزن بهترین DEM های غیر LiDAR Stage-3 باید برای فرآیند همجوشی NB-DEM استفاده شود.
3) به دست آوردن بهترین ترکیب غیر LiDAR از طریق تجزیه و تحلیل رگرسیون خطی، با بهترین لایه های DEM تولید کننده ارتفاع از جمله لایه NB-DEM ذوب شده به عنوان متغیرهای پیش بینی مستقل LiDAR-DEM. این تجزیه و تحلیل با انتخاب سیستماتیک نقاط با فاصله یکنواخت در سراسر DEM های غیر LiDAR در پوشش های LiDAR، در 1 نقطه در هر 1 کیلومتر مربع انجام شد که 7255 امتیاز برای هر لایه به دست آورد. خروجی تجزیه و تحلیل رگرسیون شامل ضرایب بهترین برازش، خطای استاندارد برآورد آنها، مقدار t Student (= بهترین برازش ضریب رگرسیون برآورد / خطای ایستاده برآورد) و Pvalue (= احتمال بهترین برازش رگرسیون ضریب به طور قابل توجهی با صفر متفاوت است).
مرحله 5. بهترین برازش رگرسیون نتیجه (که در اینجا به عنوان “NBDEM-Optimized” نامیده می شود) در سطح استان اعمال شد. با این کار، کانال جریان و مجموعه دادههای نقشهکشی DTW در سراسر استان استخراج شد [ 32 ]. نتایج تولید شده با استفاده از یک کاشی 40 در 40 کیلومتری در پوشش جدید LiDAR تأیید شد ( شکل 1 ).
کاهش پیشرونده اختلاف ارتفاع غیر LiDAR به LiDAR با انتخاب بهترین جایگشت های مرحله 1 و 2 بر اساس تفاوت لایه به لایه از نظر میانگین، انحراف استاندارد، مقادیر حداقل و حداکثر، اختلاف ریشه میانگین مربعات (RMSD) به دست آمد. و درصد اختلاف ارتفاع در محدوده ارتفاعی LiDAR ± 2 و 4 ± متر قرار دارد. همچنین نمودارهای جعبه صدک برای اختلاف ارتفاع، بر اساس لایه و مرحله به دست آمد. دنباله ای از بهترین انتخاب های ایجاد شده در شکل 2 مشخص شده است. به طور دقیق، استفاده از اندازههای پیشفرض سلول و تکنیک نمونهگیری مجدد مکعبی برای طرح مجدد، عموماً به نتایج بهتری نسبت به استفاده از روشهای دوخطی، نزدیکترین و اکثریت بازطرح مجدد منجر شد (مرحله 1). به طور مشابه، استخراج تصادفی نقاط ارتفاعی پیشبینیشده DEM در 12 نقطه در هکتار (مرحله 2)، و به دنبال آن درونیابی مجدد IDW (مرحله 3) در 10 متر به جای تفکیک 5 یا 20 متر، عموماً منجر به نتایج درون یابی مجدد بهتری نسبت به استفاده شد. روش کریجینگ و همسایه طبیعی
هر یک از DEM های غیر LiDAR ناشی از فرآیند 5 مرحله ای و DEM های LiDAR برای استخراج شبکه های کانال جریان پیوسته و شاخص DTW مرتبط در سراسر نیوبرانزویک استفاده شدند. این فرآیندها شامل استفاده از:
1) الگوریتم D8 برای استخراج جهت جریان و مجموعه دادههای انباشت جریان [ 29 ]، با کانالهای جریان تعریف شده بهگونهای که حداقل مساحت جریان-انباشتگی شیب بالای 4 هکتار را داشته باشند.
2) یک الگوریتم حداقل هزینه برای تعیین میزان کمترین تغییر ارتفاع به سمت بالا از هر کانال جریان و خط ساحلی [ 32 ].
الگوی DTW حاصل به طور کلی الگوهای زهکشی خاک را منعکس می کند، با DTW ≤ 10 سانتی متر با زهکش بسیار ضعیف، 10 < DTW ≤ 25 سانتی متر با زهکشی ضعیف، 25 <DTW ≤ 50 سانتی متر زهکش ناقص، 50 <DTW 10 سانتی متر زهکشی شده، 50 <DTW0 ≤ DTW0 ≤ چاه 100 سانتی متر و DTW > 20 متر معمولاً به خوبی زهکشی می شود. فواصل بین نزدیکترین کانالهای جریان غیر LiDAR به LiDAR مشتق شده برای هر DEM با رسم توزیع فرکانس تجمعی آنها مورد آزمایش قرار گرفت. تفاوت در هر پوشش غیر LiDAR در مقابل پوششهای DTW کمتر از 1 متر مشتق از LiDAR با تعیین میزان مناطق منفی کاذب و مثبت کاذب DTW کمتر از 1 متر، به ترتیب ارزیابی شد.
3. نتایج
تفاوت ارتفاع، توسط لایه DEM. تفاوتهای ارتفاعی لایه به لایه غیر LiDAR به LIDAR بر روی DEMهای سایهدار تپهای مربوطه در شکل 3 قرار گرفتهاند.. در این میان، تفاوتهای CDED مشتقشده از کانتور صافترین هستند، تفاوتهای NB-DEM برجستگی دارند، و تفاوتهای ASTER متغیرترین هستند. در سراسر پوششهای LiDAR-DEM، تفاوتها در امتداد پشتهها و درههای جنگلی (جایی که تغییرات ارتفاعی شیبدار رخ میدهد) بزرگترین و در مناطق باز کوچکترین است. از این رو، اختلاف ارتفاع SRTM و ASTER منفی نسبت به LiDAR-DEM در امتداد درهها، سواحل و لبههای جنگل رخ میدهد، بدون شک به دلیل تفاوت در وضوح (1 متر در مقابل 30 و 90 متر). با توجه به زمین های عمومی و الگوهای برش جنگل فشرده در سراسر نیوبرانزویک، تقریباً به همان اندازه تفاوت های منفی SRTM و ASTER نسبت به LiDAR-DEM وجود دارد که تفاوت های مثبت وجود دارد. در نتیجه، تفاوتهای میانگین تنها یک سوگیری مثبت کوچک در 1.62 و 1.47 متر برای ASTER و SRTM (90 متر) دارند.جدول 2 . در مقایسه، انحراف معیار و ریشه میانگین مربع

شکل 3 . مثالی برای تفاوتهای ارتفاعی غیر LiDAR به LiDAR (با کد رنگی) که بر روی تپههای برگرفته از DEM برای هر DEM غیر LiDAR پوشانده شده است. پایین سمت راست: تپههای سایهدار زمین برهنه LiDAR DEM.
خطاها برای ASTER DEM بزرگترین هستند، با تنها 23.2٪ از محدوده ارتفاعی آن در محدوده ارتفاعی LiDAR ± 2 متر باقی مانده است، و کمترین میزان را برای بهترین نتیجه رگرسیونی بهینه شده با NBDEM برازش می دهند. برای دومی، تفاوت ارتفاع باقی مانده با توجه به LiDAR DEM در 2± متر در 70.1٪، و در ± 4 متر در 92.9٪ است.
مرحله 1 تا 4 کاهش اختلاف ارتفاع غیر LiDAR به LiDAR. ورودی های جدول 2 و نمودارهای جعبه در شکل 4 در مورد اختلاف ارتفاع غیر LiDAR به LiDAR-DEM یک باریک شدن به سمت اختلاف 0 متر را نشان می دهد. DEM های ذوب شده و رگرسیونی بهینه شده برای NB به صورت زیر بدست آمد:
NBDEM-Fused = 0.3 NB-DEM + 0.375 SRTM 90 + 0.325 CDEDNBDEM-Fused=0.3NB-DEM+0.375SRTM90+0.325CDED(1)
(وزنها برای از بین بردن «ریدینگ» ارتفاع در سراسر NBDEM-Fused انتخاب شدند) و
NBDEM-Optimized = a + b NBDEM-Fused + c SRTM 90 + dSTRM 30 + e CDEDNBDEM-Optimized=a+bNBDEM-Fused+cSRTM90+dSTRM30+eCDED(2)
(a، b، c، d، e به ضرایب قطع و رگرسیون اشاره دارد). بهترین نتایج رگرسیون برازش تولید شده در جدول 3 گردآوری شده است. در ترکیب، تأثیر
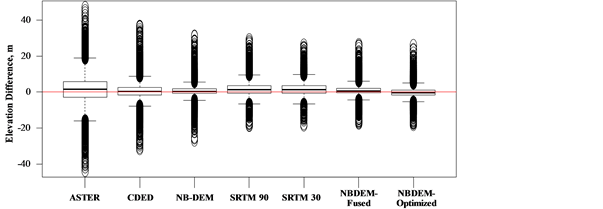
شکل 4 . نمودارهای جعبه ای برای تفاوت ارتفاع غیر LiDAR به LiDAR برای SRTM90 ، SRTM30 ، CDED ، NB-DEM، NBDEM-Fused، و NBDEM-Optimized در سراسر محدوده بهینه سازی DEM، که 10، 25، 50، 75و 90 را نشان می دهد. صدک ، نقاط بالا و پایین صدک 10 و 90 ، و یک خط مرجع در 0 متر.
گنجاندن لایه غیر LiDAR گام به گام در تحلیل رگرسیون، توالی بهبود زیر را ایجاد کرد:
NBDEM Fused ≫ SRTM30> SRTM90> CDED ≫ ASTER NBDEM Fused≫SRTM30> SRTM90>CDED≫ASTER.
از این رو، DEM های SRTM، CDED و NBDEM-Fused بیشترین کاهش اختلاف ارتفاع غیر LiDAR به LiDAR را به خود اختصاص می دهند. وارد کردن DEM های CDED و SRTM منتخب به صورت جداگانه در فرآیند رگرسیون گام به گام سود بیشتری دارد، اما فقط به صورت جزئی. استفاده از ASTER DEM هیچ پیشرفتی ایجاد نکرد. به طور جزئی، لایههای NBDEM-Fused و NBDEM -Optimized با LiDAR-DEM با کمترین سوگیری، حداقل و حداکثر تفاوت، و با حدود 70% (یعنی صدک 90) از تفاوتهای ارتفاعی در محدوده 2± مطابقت داشتند. m محدوده ارتفاعی LiDAR ( شکل 4 ).
تفاسیر هیدرولوژیکی (کانالهای جریان، مناطق مرطوب)، توسط لایه DEM. نمونه هایی از الگوهای کانال جریان و DTW تولید شده توسط DEM در شکل 5 ، توسط لایه داده ارائه شده است. همانطور که نشان داده شده است، الگوهای به دست آمده باریک و به طور گسترده با DEM های SRTM90 و SRTM30 پیکسل شده اند، تا حدودی در سراسر ASTER DEM قرار گرفته اند، و در سراسر NB-DEM برآمدگی دارند. در مقابل، لایه های CDED، NBDEM-Fused، NBDEM-Optimized و LiDAR DEMs از الگوهای نسبتاً سازگار پیروی می کنند. مزیت اصلی هیدرولوژیکی فرآیند مرحله 1 تا 5 ناشی از لغو جزئی تفاوت های ارتفاعی بین NB-DEM، CDED، و SRTM DEM و از بین بردن اساساً خطای برآمدگی NB-DEM است.
اسکن خط 3000 متری در شکل 6 ( برای مکان یابی به شکل 1 مراجعه کنید ) نمونه ای از چگونگی تغییر تفاوت ارتفاع غیر LiDAR به LiDAR در یک منطقه مدیریت جنگل در رابطه با تصویر سطح اخیر و LiDAR DEM مربوطه با سایه تپه ارائه می دهد. همچنین نشان داده شده است: (i) کارتوگرافی 0 تا 1 متر

شکل 5 . کانال جریان و الگوهای نقشه کشی عمق به آب روی DEM های غیر LiDAR و LiDAR سایه دار تپه پوشانده شده اند.
الگوی DTW، به ترتیب از 0 تا 1 متر به رنگ آبی تیره تا آبی روشن، و (ب) پروفایل های ارتفاع تاج پوشش DTW و LiDAR مشتق شده در امتداد خط اسکن. این پروفیلها با ویژگیهای DEM تشخیصدادهشده توسط تصویر و سایهدار تپهای مطابقت دارند، بهعنوان مثال، ارتفاع کم درخت در میان بریدگیها و تالابهای اخیر، مکانهای کانال جریان بریدهشده، بسترهای برافراشته یا برشخورده، و دالانهای انتقال. با این حال، همین امر در پروفیلهای اختلاف ارتفاع غیر LiDAR صدق نمیکند. برای اینها، نمایههای ASTER و CDED وسیعترین گشتوگذارها را دارند، در حالی که پروفایلهای SRTM و NB-DEM – تا حدی – تغییرات ارتفاع جنگل را منعکس میکنند، به جز در امتداد برشهای جنگلی که اخیراً با تصویر آشکار شده است. تفاوت ارتفاع SRTM به LiDAR در شکل 6 ، با این حال، تنها حدود یک دوم تا یک سوم حداکثر ارتفاع درخت تولید شده توسط LiDAR است.
نتایج اعتبارسنجی در مورد نقشهبرداری کانال جریان و منطقه مرطوب. نتایج اعتبارسنجی DEM، خارج از مناطق پردازش مرحله 3 و 4 انجام می شود

شکل 6 . تفاوت ارتفاع غیر LiDAR به LiDAR در امتداد یک خط اسکن 3000 متری (شکل 1) مربوط به الگوی DTW که روی تصویر سطح اخیر (پایین) و LiDAR DEM با سایه تپه (بالا) پوشانده شده است. همچنین نشان داده شده است، خط را برای DTW تولید شده توسط LiDAR و ارتفاعات پوشش گیاهی اسکن کنید.
( شکل 1 )، در جدول 4 و جدول 5 گردآوری شده است. برای این کاشی، همه لایهها به سمت بالا بایاس میشوند، اما کمترین میزان را برای NBDEM-Optimized در 0.58 متر، با انحراف استاندارد و اختلاف میانگین مربعات ریشه نیز به ترتیب در 2.84 و 2.90 متر است. درصد ≤ ± 2 و 4 ± متر از تفاوت های ارتفاعی به طور کلی در سراسر بهینه سازی DEM و گستره اعتبار سنجی یکسان باقی ماند، اما تا حدودی از 70.1٪ به 60.5٪ برای ≤ ± 2 متر کاهش یافت و از 92.9٪ به 95.4٪ برای ≤ ± 4 متر ( جدول 2 را با جدول 4 مقایسه کنید ).
نتایج انطباق برای نزدیکترین فاصله کانال جریان بین DEM های غیر LiDAR و LiDAR مشتق شده در شکل 7 به صورت لایه به شرح زیر بهبود یافته است.
ASTER < NB-DEM < CDED < SRTM90 < SRTM30
<=”” nbdem-optimized.<=””>
افزایش عملکرد مشابهی از ASTER به لایههای بهینهسازیشده با NBDEM از نظر کاهش DTW مثبت و منفی کاذب کمتر از 1 متر وجود دارد، با لایه NBNB-DEM بهینهسازیشده نزدیکترین به اشتقاق LiDAR DEM مجدد نمونهبرداری شده مربوط به 10 متر است. ( جدول 5 ).
به طور خلاصه، فرآیند 5 مرحله ای ترکیب با NB DEM اصلی با DEM های CDED و SRTM و متعاقباً کالیبره کردن نتیجه با قطعات DEM موجود LiDAR نه تنها بهبود یافته بلکه ترسیم کانال جریان را در سراسر نیوبرانزویک به صورت سیستماتیک و جامع گسترش داده است. شیوه. این در شکل 8 با استفاده از یک مثال در کاشی اعتبار سنجی نشان داده شده است ( شکل 1 ).
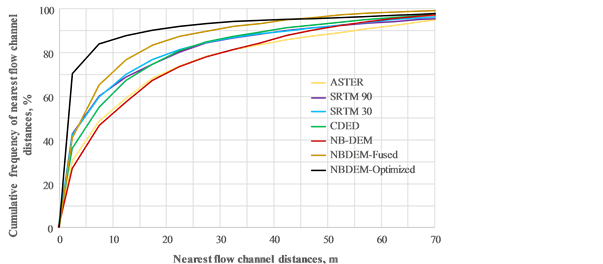
شکل 7 . فرکانس تجمعی نزدیکترین فواصل بین شبکههای کانال جریان غیر LiDAR و LiDAR مشتقشده، در وسعت اعتبارسنجی.
4. بحث
تجزیه و تحلیل بالا نشان می دهد که ادغام DEM های غیر LiDAR می تواند منجر به کاهش سیستماتیک اختلاف ارتفاع شود، که می تواند از طریق کالیبراسیون رگرسیون با مجموعه داده های LiDAR موجود بیشتر شود. سپس DEM بهینهشده میتواند برای تولید تفاسیر DEM هیدروگرافیک استان یا منطقه استفاده شود که مشابه آنچه میتوان از DEMهای تولید شده توسط LiDAR به دست آورد، حداقل با وضوح 10 متر.
به نظر می رسد کاهش عدم قطعیت غیر LiDAR-DEM از طریق فرآیند 5 مرحله ای از نظر عددی با کاهش 20 درصدی مثبت کاذب و کاهش 10 درصدی منفی کاذب کوچک باشد ( جدول 4 ). با این حال، بهبود قابل توجهی از 10 فاصله تا کانال از 25 ± متر (NB-DEM) به 5± متر (بهینه سازی شده با NBDEM) 8 بار از 10 مورد وجود دارد ( شکل 7 ). این به خودی خود و با توجه به تصاویر
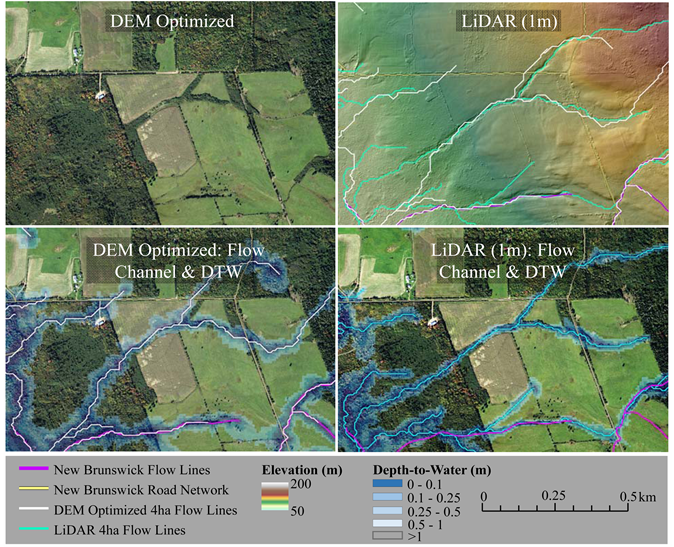
شکل 8 . کانال جریان برگرفته از NBDEM-بهینه شده (پایین سمت چپ) و LiDAR-DEM (پایین سمت راست)، و ترسیمهای DTW کمتر از 1 متر، در مقابل مسیرهای آبی شبکه هیدروگرافی نیوبرانزویک، روی تصاویر هوایی و LiDARDEM سایهدار تپه (بالا سمت راست) فقط). به تطابق بین کانال های جریان حاصل از DEM و بافرهای پوشش گیاهی ساحلی توجه کنید. مکان: بخشی از کاشی اعتبارسنجی در شکل 1.
در شکل های 5-7 منجر به پیشرفت های قابل توجهی در نقشه برداری جامع کانال های جریان و مناطق مرطوب در سراسر نیوبرانزویک شده است. به نوبه خود، این تأثیر مثبتی بر برنامه ریزی عملیات محلی و منطقه ای داشته است، به عنوان مثال، مدیریت جنگل (طرح بلوک برداشت و دسترسی)، حمل و نقل و مسیریابی مسیر، ارزیابی اثرات زیست محیطی، معاملات زمین، و واکنش های اضطراری. تا حدی، برخی از مزایای کل استان از ترسیمهای بهبود یافته DEM و تعیین مناطق حوضه شیبدار حاصل میشود. این مناطق برای تخمین، به عنوان مثال، نرخ تخلیه بالقوه آبراهه و ابعاد پل و پل لازم در هر تقاطع رودخانه، توسط رویدادهای آب و هوایی شدید (به عنوان مثال، 100 میلی متر یا دبی رودخانه در روز، تقریباً معادل یک رویداد طوفانی 100 ساله) استفاده می شود. ). در این راستا، کاهش خطای DEM به ویژه در مناطق مسطح مهم است.
لایه NB-DEM بهینه شده نیز برای بررسی پوشش های تالاب در سطح استان مفید است. به طور کلی، تالاب های از قبل مشخص شده در محدوده DTW<0.5 متر قرار می گیرند [ 30 ]. گسترش بررسی انطباق بین مرز تالاب مشخص شده با DEM و مرز واقعی با استفاده از NB-DEMlayer اصلی به میزان 80 ± متر، 8 بار از 10 برابر است. در مقابل، خطوط DTW = 0.5 متر مشتق شده از LiDAR-DEM با مرزهای تالاب واقعی در 10 ± متر، 8 بار از 10 مطابقت دارد (جزئیات نشان داده نشده است). DEM بهینه شده، در حالی که تا حدودی دقت کمتری نسبت به LiDAR-DEM دارد، با این وجود می تواند برای ردیابی و بررسی ارتباط تالاب به تالاب در سراسر استان مورد استفاده قرار گیرد.
این واقعیت که همجوشی DEM منجر به بهبود DEM از نظر کاهش خطای عمودی و جانبی می شود، بارها نشان داده شده است (به عنوان مثال، [ 37 ] [ 38 ] [ 46 ] [ 47 ])، اما فرآیندهای همجوشی مربوط به تغییر اندازه سلول، دوباره طرح ریزی، درون یابی مجدد نمونه برداری، وزن دهی DEM و فیلتر نویز همه متفاوت است. برای مثال، [ 40 ] «یک مدل ارتفاعی دیجیتالی 90 متری هموار شده تقریباً جهانی، بدون فضای خالی، چند مقیاسی» به نام EarthEnv-DEM90 (https://geomorphometry.org/content/earthenv-dem90) تولید کرد. تران و همکاران [ 48] ASTER را با داده های SRTM30 از طریق (i) ارزیابی کیفیت DEM و پیش پردازش، (2) اجرای DEM هیدرولوژیکی، (iii) پر کردن فضای خالی و جابجایی طرح ریزی، (iv) حذف سوگیری DSM در مقابل DTM توسط شکل زمین، و (v) DEM ترکیب کرد. نویز زدایی فرآیند 5 مرحلهای در این مطالعه از [ 48 ] از طریق اندازه سلولی سیستماتیک و پردازش مجدد DEM (طرحگذاری مجدد و درونیابی مجدد)، و استفاده از فرآیند رگرسیون برای حذف سوگیری متفاوت است. DEM های مرجع نیز متفاوت هستند: با استفاده از یک DEM تولید شده از نقشه توپوگرافی 1:10000 فواصل 5 متری و داده های ارتفاع نقطه (یعنی مشابه CDED) در مقابل استفاده از DEM 1 متری LiDAR نمونه برداری مجدد در 10 متر.
از نظر بکارگیری رویکرد فوق در سایر مناطق با DEM های مشابه و/یا متفاوت از جمله پوشش های DEM LiDAR، بررسی هر DEM دوباره پیش بینی شده، نمونه برداری مجدد و درون یابی مجدد با توجه به مصنوعات و صحت هیدروگرافی مهم است. در این راستا، تمام سطوح آب های آزاد باید مسطح شوند و نهرها و رودخانه ها باید به طور یکنواخت از طریق زمین های اطراف خود به سمت سواحل پذیرنده ریزش کنند.
5. نتیجه گیری ها
ادغام سیستماتیک لایههای DEM موجود در حال حاضر برای تمام نیوبرانزویک نه تنها منجر به کاهش قابلتوجه اختلاف ارتفاع غیر LiDAR به LiDAR DEM شد، بلکه یک مکاتبات نزدیکتر و قابل تأیید بین کانالهای جریان حاصل و مشتقات منطقه مرطوب ایجاد کرد. به طور خلاصه، فرآیند 5 مرحله ای که در این مقاله توضیح داده شد نشان می دهد که:
1) تفاوت ارتفاع غیر LiDAR نسبت به DEM های LiDAR را می توان از طریق تجزیه و تحلیل دقیق که نیاز به طرح ریزی مجدد، نمونه برداری مجدد و درون یابی مجدد دارد و به دنبال آن ادغام انتخابی DEM غیر LiDAR کاهش داد.
2) فرآیند ادغام لایههای SRTM، CDED و NB-DEM، که هر کدام با وزن برابر استفاده میشوند، در ایجاد پوشش غیرLiDAR-DEM بسیار بهبود یافته در سراسر نیوبرانزویک مؤثر بود. استفاده از ASTER DEM بهترین نتیجه همجوشی به دست آمده را بهبود نداد.
3) فرآیند همجوشی بسیاری از مصنوعات خاص لایه و تفاوتهای بزرگ ارتفاع لایه به لایه را حذف کرد، در حالی که فرآیند رگرسیون غیر LiDAR به LiDAR-DEM بایاس ارتفاع NBDEM-بهینهسازی شده را به کمتر از 1 متر کاهش داد.
4) در حالی که نتایج خاص هستند و می توانند به طور جامع در سراسر نیوبرانزویک اعمال شوند، بهبودهای مشابه غیر LiDAR DEM می تواند در جاهای دیگر رخ دهد.
منابع


بدون دیدگاه