

خلاصه
این مقاله یک روش برای تشخیص آسیب خاکریز بر اساس داده های سیستم هوایی بدون سرنشین (UAS) ارائه می کند. در این آزمایش، داده ها از پلت فرم UAS که مجهز به اسکنر لیزری و دوربین دیجیتال RGB (قرمز، سبز، آبی) بود، به دست آمد. ابرهای نقطهای اسکن لیزری هوابرد (ALS) برای تولید مدل زمین دیجیتال (DTM) و تصاویر برای تولید ارتفتو RGB استفاده شد. هدف اصلی مقاله ارائه یک روش مبتنی بر ALS و شاخص پوشش گیاهی از RGB orthophoto بود که به یافتن مکانهای بالقوه خرابی خاکریز کمک میکند. هر دو نوع داده چند زمانی جمع آوری شده از پلت فرم UAS به طور جداگانه اعمال می شوند: ارتفاع و داده های نوری. دو مدل DTM از دوره های زمانی مختلف مقایسه شدند: اولین مورد از ابر نقطه ALS تولید شد و DTM دوم از دادههای اسکن لیزری UAS (ULS) تحویل شد. عکسهای آرشیوی و جدید به مجموعه دادههای شطرنجی شاخص گیاهی سبز-قرمز (GRVI) تبدیل شدند. از شطرنجی GRVI، تشخیص تغییر برای مناطق زمینی بدون پوشش با استفاده از یک آستانه نشانداده شده به صورت پویا مورد تجزیه و تحلیل قرار گرفت. نتیجه این رویکرد، محلیسازی مکانهایی است که تغییر ارتفاع با ظاهر زمین بدون پوشش گیاهی مرتبط است. این روش ساده و خودکار ابزاری را برای نظارت تخصصی بر سیلابها فراهم میکند که از اشیاء مهم در برابر سیل محافظت میکنند. تشخیص تغییر برای مناطق بدون پوشش گیاهی با استفاده از یک آستانه نشانداده شده به صورت پویا مورد تجزیه و تحلیل قرار گرفت. نتیجه این رویکرد، محلیسازی مکانهایی است که تغییر ارتفاع با ظاهر زمین بدون پوشش گیاهی مرتبط است. این روش ساده و خودکار ابزاری را برای نظارت تخصصی بر سیلابها فراهم میکند که از اشیاء مهم در برابر سیل محافظت میکنند. تشخیص تغییر برای مناطق بدون پوشش گیاهی با استفاده از یک آستانه نشانداده شده به صورت پویا مورد تجزیه و تحلیل قرار گرفت. نتیجه این رویکرد، محلیسازی مکانهایی است که تغییر ارتفاع با ظاهر زمین بدون پوشش گیاهی مرتبط است. این روش ساده و خودکار ابزاری را برای نظارت تخصصی بر سیلابها فراهم میکند که از اشیاء مهم در برابر سیل محافظت میکنند.
کلید واژه ها:
UAS ; LiDAR ; فتوگرامتری ؛ نظارت بر خاکریز ; آسیب خاکریز ; تشخیص آسیب
1. معرفی
به نظر می رسد نظارت بر خطر به طور فزاینده ای اهمیت بیشتری پیدا کند. تصاویر ماهواره ای که به طور سیستماتیک به دست می آیند معمولا برای نظارت بر پدیده هایی استفاده می شوند که ممکن است مناطق وسیعی را ویران کنند، به عنوان مثال، گردبادها، زلزله ها، آتش سوزی های بزرگ جنگل ها و خطرات سیل [ 1 ، 2 ، 3 ]. با این حال، در حالی که خطراتی نیز وجود دارد که ممکن است برای مناطق کوچکتر خطرناک باشد، استفاده از تصاویر ماهواره ای برای نظارت بر آنها امکان پذیر نیست، حتی اگر تهدید مرتبط با آسیب آنها می تواند خطرات عظیمی را در ارتباط با سیل ایجاد کند. سیلاب ها که به آنها دایک، خاکریز، سیلاب یا توقفگاه نیز می گویند، تأسیسات خطی با اندازه کوچک هستند. آنها نقش بسیار مهمی در حفاظت از سیل دارند، اما آنها تنها یکی از ابزارهای موجود برای کنترل سیل هستند [ 4 ]]. آنها معمولاً تحت نظارت و اندازه گیری دوره ای با تکنیک های نقشه برداری مستقیم هستند که دقت بالایی را تضمین می کند، اما فواصل طولانی بین مقاطع، تجزیه و تحلیل دقیق کل سطح آنها را محدود می کند. با توجه به منابع مختلف داده سنجش از دور، نمی توان با استفاده از تصاویر ماهواره ای نقص در سیلاب ها را مشاهده کرد زیرا وضوح به اندازه کافی بالا نیست. این عیوب عبارتند از: ریزش خاک، حرکت خاک و آسیب های ناشی از حیوانات و انسان ها. بنابراین، داده های هوابرد را می توان در این برنامه به منظور شناسایی مناطق خطرناک استفاده کرد [ 5 ، 6 ]. امروزه، پایش خاکریز را می توان با استفاده از تکنیک های سنجش از دور با موفقیت انجام داد، و در بیشتر موارد، از داده های فتوگرامتری هوایی استفاده می شود – به ویژه تصاویر هوایی با وضوح بالا [ 7 ، 8 ].] و ابرهای نقطه LiDAR (تشخیص نور و محدوده) [ 9 ]. داده های LiDAR در مقایسه با داده های فتوگرامتری مزایای زیادی دارند. نفوذ از طریق پوشش گیاهی مهمترین عامل است. داده های LiDAR می توانند اطلاعات قابل اعتمادی را در مورد زمین خالی ارائه دهند. با این حال، وضوح این نوع داده ها (بیان شده در تراکم ابر نقطه ای) را نمی توان با تصاویر هوایی که می توان با وضوح سانتی متر جمع آوری کرد مقایسه کرد. مقایسه هر دو تکنیک برای سالها موضوع انتشارات علمی بوده است [ 10] و در ابتدا مربوط به سکوهای سرنشین دار در ارتفاع بالا بود. متأسفانه، نقطه ضعف پلتفرم های سرنشین دار فراوانی و هزینه های جمع آوری داده ها است. پروازهای فتوگرامتری معمولاً هر چند سال یکبار برای همان منطقه انجام می شود. برای اشیاء راهرو، مانند سیلها، جمعآوری دادهها با استفاده از سیستم هوایی بدون سرنشین (UAS) ممکن است به یک جایگزین مقرونبهصرفهتر برای فتوگرامتری در ارتفاع بالا تبدیل شود [ 7 ، 8 ، 11 ]. در ادبیات، مقالاتی در دسترس هستند که بر استفاده از اطلاعات طیفی از تصاویر منتقل شده توسط UAS به منظور تجزیه و تحلیل و تشخیص پوشش گیاهی تمرکز دارند [ 12 ، 13 ، 14 ]]. به طور معمول، عکسهای ارتوفت RGB (قرمز، سبز، آبی) دادههای اولیهای هستند که از تصاویر UAS تولید میشوند، با این حال، دادههای UAS همچنین میتوانند شطرنجی از شاخصهای گیاهی مانند شاخص گیاهی تفاوت نرمال شده (NDVI) یا شاخص گیاهی سبز-قرمز را ارائه دهند. GRVI). شاخص اخیر در مورد UAS جالب است زیرا اکثر چنین پلتفرم هایی فقط به دوربین های نوری RGB مجهز هستند. در ادبیات، برخی از منابع با استفاده از داده های چند زمانی از UAS در تجزیه و تحلیل تشخیص تغییر [ 15 ، 16 ، 17 ، 18 ، 19 ] آدرس می دهند. ارجاع به استفاده از اسکن لیزری UAS عمدتاً آزمایشهایی را روی پوشش گیاهی بالا ارائه میکند، جایی که توجیهپذیرتر است [ 20 ]]. افزایش تفکیک زمانی و مکانی مجموعههای UAS باید نظارت مؤثرتری بر شرایط خاکریز و شناسایی خطرات احتمالی سیل فراهم کند. این امر به ویژه از آنجایی که استفاده از سایر دادههای هوابرد با وضوح متوسط برای ارزیابی تغییرات در مناطق کوچک اغلب از نظر فناوری، منابع یا محیطزیست محدود است، صادق است.
در این مقاله، راه حلی با استفاده از پلت فرم UAS به عنوان یک جایگزین مقرون به صرفه تر برای فتوگرامتری ارتفاع بالا در نظارت بر آبریز ارائه شده است. داده های UAS را می توان در تجزیه و تحلیل چند زمانی با داده های هوایی معمولی نیز استفاده کرد. سیستمهای هوایی بدون سرنشین قبلاً در زمینههای مختلف کاربرد پیدا کردهاند که میتوان آن را به زمان کوتاه پردازش دادههای UAS، دقت بالا و ویژگی غیرتهاجمی اندازهگیری نسبت داد. علاوه بر این، سیستم عامل های UAS را می توان به سنسورهای مختلفی (اسکنرهای لیزری و تقریباً همه انواع دوربین ها: نوری از جمله مادون قرمز نزدیک، ماوراء بنفش یا حرارتی) مجهز کرد.
هدف از این مقاله ارائه روشی برای پایش سیلاب ها و تشخیص عیوب سیلاب ها به منظور کاهش اثرات منفی سیل در صورت وقوع بود. مجموعه داده هایی که برای توسعه این روش مورد استفاده قرار گرفتند – ابرهای نقطه LiDAR و تصاویر RGB – از دو دوره زمانی و آزمایش از دو منبع مختلف می آیند. یک مجموعه داده با استفاده از UAS به دست آمد، در حالی که مجموعه داده های آرشیوی با استفاده از یک هواپیما جمع آوری شد. ابرهای نقطه LiDAR و تصاویر RGB به ترتیب به مدلهای ارتفاع دیفرانسیل و تشخیص تغییر زمین بدون پوشش گیاهی پردازش شدند. سپس، این اطلاعات توسط هیدرولوژیست ها برای ارائه تجزیه و تحلیل فضایی خاص در مورد شرایط خاکریزی که تأثیر مهمی بر ارزیابی زیرساخت های حفاظت از سیل دارد، استفاده شد.
این مقاله بخشی از یک پروژه پیاده سازی است که در آن داده های چند منبعی و چند زمانی امکان ارزیابی وضعیت خاکریز را فراهم می کند. در بخشهای زیر، روششناسی استفاده از محصولات بهدستآمده از دادههای بهدستآمده با پلتفرم UAS ارائه میشود: مدلهای زمین دیجیتال (DTMs) و عکسهای ارتو. علاوه بر این، یک مثال عملی با بحث در مورد مدل دیفرانسیل و شطرنجی شاخص پوشش گیاهی، از جمله انتخاب مقدار آستانه برای تشخیص تغییر زمین لازم برای تشخیص زمین بدون پوشش، ارائه شده است. بخشهای پایانی خلاصهای، نتیجهگیری و کار آینده مربوط به اجرای روششناختی در سیستم IT (فناوری اطلاعات) ساختهشده را برای مدیریت سطوح ارائه میکند [ 6 ، 21 ]] به نام SAFEDAM.
2. روش شناسی کاربرد داده های UAS در سیستم فناوری اطلاعات
این بخش روشی را ارائه میکند که از دادههای UAS برای نظارت بر سقف استفاده میکند و آن را در سیستم فناوری اطلاعات پیادهسازی میکند. همچنین توضیحاتی در مورد داده هایی که در آزمایش آزمایش شدند وجود دارد.
2.1. شرح گردش کار
در شکل 1 ، در صورت موجود بودن داده های RGB و LiDAR، روش تشخیص آسیب خاکریز که در پروژه SAFEDAM توسعه یافته است، ارائه شده است. این بر اساس UAS یا داده های ارتفاع بالا است. در این روش، از دو منبع داده سنجش از دور استفاده شد: ابرهای نقطهای بهدستآمده از اسکنرهای لیزری و عکس ارتوفتو RGB. آنها در تجزیه و تحلیل تغییرات ارتفاع و پوشش زمین به صورت موازی استفاده می شوند.
داده های اسکن لیزری شرح داده شده در بخش 2.2برای تولید مدلهای زمین دیجیتالی که در یک نرمافزار بیرونی اختصاص داده شده به دادههای LiDAR، از جمله پردازش پس از مسیر (Applanix Pos-Pack) و طبقهبندی ابر نقطهای برای دو کلاس: زمینی و غیرزمینی و تولید DTM (Terrasolid) استفاده شد. . یک شطرنجی از تفاوت ارتفاع (dDTM – DTM دیفرانسیل) از دو DTM (دوره های زمانی مختلف) در مرحله بعدی برای تشخیص تغییرات ارتفاع (به عنوان مثال، لغزش زمین) که ممکن است حاکی از نقص و در نتیجه خطر باشد، محاسبه شد. در این آزمایش، از مجموعه دادههای اسکن لیزری UAS در ارتفاع پایین (ULS) و اسکن لیزری در ارتفاع بالا (ALS) استفاده شد. در سیستم IT، اگر داده های مناسب در دسترس باشد، هم DTM های مبتنی بر ULS یا هم مجموعه داده های مبتنی بر ALS را می توان کم کرد. dDTM باید مجدداً طبقهبندی شود تا نواحی دارای تغییراتی را که میتوان به درستی شناسایی کرد و نتیجه را نمیتوان تحت تأثیر دقت مجموعه دادهها قرار داد، شناسایی کرد. شرح مقدار آستانه طبقه بندی مجدد انتخاب شده در روش در ارائه شده استبخش 3.1 .
تصاویر هوایی شرح داده شده در بخش 2.2در نرمافزار فتوگرامتری بیرونی (Agisoft Metashape برای دادههای UAS و Trimble Inpho برای تصاویر هوایی آرشیو) برای تصحیح دادههای نوری با استفاده از DTM پردازش شدند. در روش توصیف شده، هر دو عکس ارتوفتو RGB برای محاسبه GRVI استفاده می شود. این شاخص برای شناسایی مناطق بدون پوشش گیاهی “جدید” که بین دو دوره اکتساب داده ها رخ می دهد، استفاده شد، زیرا کمبود پوشش گیاهی نیز زمانی که ایمنی خاکریز در نظر گرفته می شود یک خطر است. تجزیه و تحلیل هر دو شطرنجی زمین پوشش گیاهی نشان می دهد که تفاوت هایی (مکان هایی با مکان های جدید زمین پوشش گیاهی) پیدا شده است. مشکل اساسی در کاربرد شاخص GRVI، یافتن مقادیر مناسب برای این شاخص برای تشخیص سطح پوشش گیاهی است. این به حل مشکل تاریخ ها، زمان ها و شرایط مختلف در حین جمع آوری داده ها مربوط می شود. این موضوع در ارائه شده استبخش 3.2 .
مناطق بدون پوشش گیاهی “جدید” و dDTM برای شناسایی مناطق آسیب احتمالی خاکریز برای تجزیه و تحلیل بیشتر توسط متخصص تحویل داده می شود. در طول تفسیر، مناطقی که هر دو شرایط را برآورده میکنند (|dDTM| > آستانه و سطح زمین پوشش گیاهی “جدید”) باید به دقت بررسی شوند، اگر شکست احتمالی تایید شود. با این حال، توجه به شرط اول (|dDTM| > آستانه) نیز می تواند به عنوان یک خطر تفسیر شود، در مقابل مشاهده فقط سطح زمین بدون پوشش گیاهی “جدید”، که می تواند اثر یک تغییر ساده در پوشش گیاهی ناشی از دلایل دیگر باشد. خشکسالی.
2.2. شرح داده های تست شده
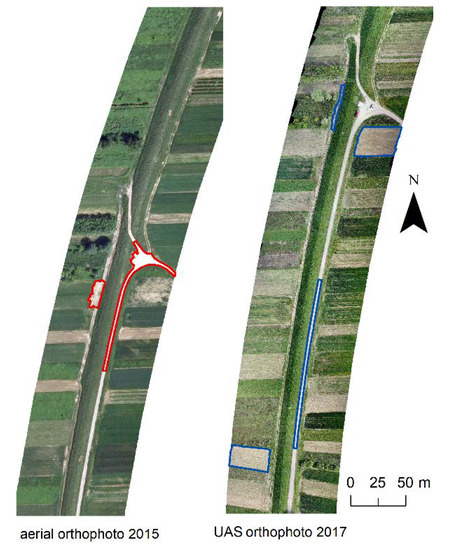
منطقه آزمایشی که در آن داده ها به دست آمد، یک خاکریز در آنوپول، لهستان، در نزدیکی رودخانه ویستولا است ( شکل 2 ). منطقه آزمایش تقریباً 6 کیلومتر طول داشت. تصاویر هوایی از هواپیما در ژوئن 2015 با فاصله نمونه برداری از زمین (GSD) 25 سانتی متر به دست آمد و داده های اسکن لیزری با تراکم متوسط 4 نقطه بر متر مربع در سال 2011 در برنامه ملی جمع آوری داده های ALS ثبت شد. [ 22 ]. دادههای UAS در می 2017 با پلتفرم The Hawk Moth مجهز به دو حسگر به دست آمد: اسکن لیزری YellowScan Surveyor و دوربین RGB Sony Alpha a6000، در هشت مأموریت پروازی راهرو بر فراز خاکریزها و اطراف آنها [ 19 ].
چگالی ابر نقطه ULS 180 نقطه بر متر مربع بود. طبقه بندی ابر نقطه ULS در نرم افزار Terrasolid پردازش شد که الگوریتم Axelsson را برای طبقه بندی زمین پیاده سازی می کند. DTM ها از ULS و ALS طبقه بندی شده با وضوح 0.25 متر تولید شدند که توسط نویسندگان در مقاله قبلی [ 19 ] مورد بررسی قرار گرفت. اطلاعات دقیق در مورد داده ها در جدول 1 ارائه شده است .
وضوح تصاویر بهدستآمده با پلتفرم UAS 0.025 متر بود که حاصل جمعآوری همزمان از پلتفرم UAS با جمعآوری دادههای UAS و وضوح نهایی ارتوفوتو که 0.10 متر بود. چنین قطعنامه ای برای تشخیص سطح پوشش گیاهی برای ارزیابی آسیب های خاکریزی کافی است. با توجه به جهت گیری تصویر، تصاویر هوایی آرشیوی از سال 2015 قبلاً با پارامترهای جهت گیری بیرونی ارائه شده توسط منابع ملی ژئودتیک و کارتوگرافی جهت گیری شده بودند. تصاویر UAS در یک تنظیم بستهای جغرافیایی ارجاع داده شدند و در نرمافزار Agisoft Metashape با استفاده از نقاط کنترل و چک (1×1 متر صفحه شطرنج سفید-سیاه، علامتگذاری شده و در یک میدان با آنتن GNSS Leica GS15 و CS15 با استفاده از Real-Time Kinematic) تصحیح شدند. روش با دقت 0.02 متر).
3. نتایج تغییر-تشخیص
این بخش به سه بخش تقسیم می شود که استفاده از داده های ارتفاعی ( بخش 3.1 )، داده های نوری ( بخش 3.2 ) و کاربرد آنها در سیستم فناوری اطلاعات ( بخش 3.3 ) را ارائه می کند.). بخش اول شامل تشخیص تغییرات ارتفاع بین DTM هایی است که از داده های اسکن لیزری به دست آمده در دوره های زمانی مختلف تولید شده اند. تجزیه و تحلیل تغییرات ارتفاع بر اساس DTM های دیفرانسیل، مکان های خطر احتمالی را تنها با استفاده از اطلاعات تشخیص تغییر ارتفاع نشان می دهد. بخش دوم شامل جستجوی تغییرات در پوشش زمین است. بدین ترتیب در این قسمت از تصاویر RGB و شاخص های پوشش گیاهی که از باندهای تصویر محاسبه می شوند استفاده می شود. بخش آخر شرحی از کاربرد محصولات فوق در سیستم فناوری اطلاعات ارائه شده در نظارت بر سیل می باشد.
3.1. داده های ارتفاعی
بخش اول روش ارائه شده در شکل 1 شامل تشخیص تغییرات بین داده های ارتفاعی است. دو DTM که در دوره های مختلف به دست آمده بودند با هم مقایسه شدند ( شکل 3 ). اولین DTM از داده های آرشیوی ALS به دست آمد و این مدل به عنوان یک مرجع در نظر گرفته شد. DTM دوم از داده های UAS LiDAR تولید شد. متعاقباً، DTMها کم شدند و DTM دیفرانسیل (dDTM) تجزیه و تحلیل شد. چنین رستری از دو DTM منبع محبوبی برای تفسیر جنبش های توده ای است [ 23 , 24 , 25]. در آزمایش، آستانه های ارتفاع مختلفی در نظر گرفته شد: 0.10 متر، 0.25 متر و 0.50 متر، که به عنوان بهترین تجسم به منظور پشتیبانی از کاربران نهایی با تفسیر وقوع احتمالی خطر مربوط به آسیب احتمالی خاکریز پیشنهاد شد. برای آستانه برابر با 0.10 متر، مناطق زیادی وجود داشت که ممکن است به عنوان یک خطر شناخته شوند. این ممکن است نتیجه پوشش گیاهی کم باشد که عمدتاً در دامنههای خاکریز و اطراف آن رشد میکند. این مکان ها همچنین می توانند تحت تأثیر دقت داده های LiDAR یا احتمال نفوذ پرتو لیزر از طریق پوشش گیاهی متراکم قرار گیرند. با تجزیه و تحلیل آستانه برابر با 0.50 متر، تقریبا هیچ چیز به عنوان خطر در dDTM طبقه بندی نشد. بنابراین، 0.25 متر به عنوان بهترین مقدار آستانه برای تجسم در یک سیستم پشتیبانی از کار هیدرولوژیست انتخاب شد. در شکل 4، تفاوت های طبقه بندی مجدد بین DTM ها ارائه شده است. اختلاف ارتفاعی که از مقدار مطلق 0.25 متر بیشتر است، با مقیاس رنگ قرمز آبی به عنوان خطر مشخص شده است و نیاز به تأیید و مقایسه با نتایج آنالیز orthoimage دارد. شطرنجی تفاوت تحلیل شده DTM با پوشش گیاهی سنگین نیست زیرا پردازش ابر نقطه LiDAR پوشش گیاهی را در طول تولید DTM فیلتر می کند. با این حال، می توان تأثیر اندک پوشش گیاهی متراکم (محصولات زراعی، درختان سوزنی برگ جوان یا چمن های متراکم بالا) را در مدل دیفرانسیل مشاهده کرد. اگر بتوان چنین تأثیری را در مقادیر کم بالقوه مشاهده کرد (معمولاً در کلاس 0.25-0.50 متر طبقه بندی می شوند)، می توان آن را با استفاده از یک ارتوموزائیک تفسیر کرد.
3.2. داده های نوری
بخش دوم روش ارائه شده در شکل 1 شامل تشخیص تغییرات در لبه ها از تصاویر RGB با تعیین شاخص سبز-قرمز پوشش گیاهی (GRVI) است که در چند نشریه دیگر مورد استفاده یا بررسی قرار گرفت [ 26 ، 27 ، 28 ]. شاخص GRVI با فرمول داده شده (1) محاسبه می شود:
جیآرVمن=ρجی-ρآرρجی+ρآر
جایی که:
-
ρR – بازتاب رنگ قرمز قابل مشاهده روی تصویر است
-
ρG – بازتاب رنگ سبز قابل مشاهده روی تصویر است
عکس های گرفته شده توسط پلت فرم UAS در زمان ها و تاریخ های مختلف جمع آوری می شوند. بنابراین، برای اینکه رویکرد قابل اجرا باشد، باید بر نتایج مناسب پردازش شاخص که یک شطرنجی از ناحیه پوشش گیاهی است، متمرکز شود. روش پردازش تصویر، تصحیح رادیومتری عکسها با نقاط کنترل مشخص شده، و همچنین نقطه سفید یا منحنیهای پاسخ سنسور را ارائه نمیکند. با این حال، تنظیم رادیومتریک در نرم افزار فتوگرامتری در طول تولید ارتوموزائیک قبل از افزودن ارتوموزائیک به سیستم اجرا شد. رادیومتری را در یک منطقه برای یک تاریخ یکسان می کند. تشخیص مناسب مناطق بدون پوشش گیاهی ارتباط نزدیکی با آستانه GRVI دارد. موتوکا و همکاران [ 26] یک مقدار تقریبی با GRVI = 0 را پیشنهاد کرد که می تواند یک آستانه موثر برای تمایز بین پوشش گیاهی سبز و سایر انواع پوشش های زمینی باشد. مشاهده شد که این شاخص با توجه به فصول به ویژه در پاییز تغییر می کند. تصمیم گرفته شد که در این مورد، شاخص GRVI به عنوان مبنایی برای تشخیص زمین بدون پوشش گیاهی عمل می کند.
در روش ارائه شده، GRVI با استفاده از تصاویر هوایی و UAS محاسبه شد. نمونه ای از مقدار آن در شکل 5 نشان داده شده است. به عنوان گام بعدی، به منظور تمایز زمین بدون پوشش از سایر اجسام در تصویر، مقدار آستانه شاخص باید تعیین شود. برای هر دو عکس هوایی و UAS، مقادیر آستانه به چند عامل بستگی دارد، به عنوان مثال، زمان گرفتن تصویر، نوع سنسور، نور خورشید و غیره. بنابراین، مقادیر ثابت نیستند و باید هر بار که از تصاویر RGB جدید استفاده میشود، تخصیص داده شوند. . فایل های شطرنجی که نمایانگر زمین پوشش گیاهی هستند باید کم شوند تا زمین های پوشش گیاهی جدیدی که در دوره تجزیه و تحلیل رخ می دهد شناسایی شود. این فرآیند تشخیص تغییر یک فایل شطرنجی تولید می کند که نمایانگر زمین جدید پوشش گیاهی است.
به منظور یافتن مناسب ترین مقدار آستانه GRVI، آزمایشی انجام شد که در آن از سطح زمین بدون پوشش گیاهی استفاده شد. چند ضلعی ها، که در این سایت های آموزشی ایجاد شده اند، برای ارزیابی دقت طبقه بندی در امتداد طیفی از آستانه GRVI برای هر دو مجموعه داده استفاده شدند ( شکل 6 ). به عنوان گام بعدی، فایلهای رستری که مقادیر GRVI را ارائه میکنند، با توجه به مقادیر آستانه انتخابشده به دو کلاس طبقهبندی شدند: زمین بدون پوشش گیاهی و زمین پوشش گیاهی. در نهایت، می توان ارزیابی کرد که کدام مقدار آستانه مناسب ترین است. بنابراین، نواحی میدانهای آزمایشی بردار شده با کلاس زمین بدون پوشش موجود در چند ضلعیها مقایسه شد. نتایج مقایسه در جدول 2 ارائه شده است.
همانطور که از جدول 2 می توان نتیجه گرفت ، بین آستانه های GRVI محاسبه شده از تصاویر هوایی و تصاویر UAS (دوره زمانی مختلف، سنسور و غیره) تفاوت هایی وجود دارد. برای مقادیر آستانه داده شده، درصد پیکسل هایی که به درستی به عنوان زمین بدون پوشش طبقه بندی شده اند متفاوت است. طبق جدول 2 ، آستانه ای که تضمین می کند، یعنی حداقل 95 درصد صحت در تشخیص ناحیه پوشش گیاهی برای GRVI از تصاویر هوایی، کمتر از GRVI از تصاویر UAS است (به ترتیب 0.02 و 0.03).
بر اساس نتایج ارائه شده در جدول 2 ، یک نمودار تولید شد ( شکل 7 ). در نمودار، دو منحنی نشان دهنده درصد زمین شناسایی شده در UAS و تصاویر هوایی برای آستانه انتخاب شده ارائه شده است. همانطور که مشاهده می شود، برای مقادیر منفی آستانه، درصد سطح پوشش گیاهی شناسایی شده به سرعت افزایش یافت و سپس منحنی ها به تدریج صاف تر شدند. این نشان می دهد که یک مقدار آستانه مناسب رسیده است.
با تجزیه و تحلیل نتایج جدول 2 و آستانه های GRVI ارائه شده در شکل 8 ، می توان بهترین مقادیر آستانه GRVI را هم برای تصاویر ارتفاع بالا و هم برای تصاویر UAS انتخاب کرد. در شکل 8 الف، طبقه بندی زمین بدون پوشش بر اساس تصاویر هوایی ارائه شده است. تفاوت های زیادی بین آستانه های انتخاب شده به راحتی قابل مشاهده است. اظهارات مشابهی را می توان در تجزیه و تحلیل شکل 8 ب، که در آن مناطق بدون پوشش گیاهی بر اساس تصاویر UAS نشان داده شده است، بیان کرد. مطابق جدول 2، برای میدان های آزمایشی انتخاب شده با مقدار آستانه رو به رشد، صحت زمین پوشش گیاهی شناسایی شده در حال افزایش است. با این حال، هر چه مقدار آستانه بالاتر باشد، افزایش صحت کندتر است. علاوه بر این، ارزش آن را دارد که نمایش گرافیکی آستانه GRVI در شکل 7 مورد تجزیه و تحلیل قرار گیرد ، که نشان می دهد با یک آستانه بالاتر، کلاس زمینی بدون پوشش گیاهی ممکن است بیش از حد برآورد شود. بر اساس جدول 2 و همچنین شکل 8 ، مقادیر آستانه انتخاب شده اند: برای فتوگرامتری ارتفاع بالا: 0.02 و برای تصاویر UAS: 0.03. با توجه به نتایج ارائه شده در جدول 2مقادیر آستانه بالاتر، سطح زمین پوشش گیاهی را با دقت بیشتری متمایز می کند، اما رسترهای طبقه بندی GRVI تخمین بیش از حد طبقه زمین بدون پوشش را نشان می دهد.
پس از انتخاب مناسبترین مقدار آستانه GRVI برای هر دو مجموعه داده با استفاده از ابزار پویا که اثر شفاف طبقهبندی مجدد پوشاننده ارتوفتو را در مقیاس بزرگ تجسم میکند، یک کلاس زمینی جدید پوشش گیاهی را میتوان در طول تجزیه و تحلیل تشخیص تغییر برای کل منطقه تشخیص داد. بنابراین، فایلهای شطرنجی ارائهدهنده زمین پوشش گیاهی که بر اساس آستانههای انتخابی طبقهبندی شدهاند، باید کم شوند. در نتیجه، فایل شطرنجی که زمین پوشش گیاهی “جدید” را نشان می دهد (شطرنج تشخیص تغییر زمین بدون پوشش) به دست آمد.
3.3. کاربرد نتایج
ایده استفاده از دادههای UAS برای نظارت بر خاکریزها این است که مدل دیجیتالی دیفرانسیل زمین و دادههای تشخیص زمین پوشش گیاهی «جدید» باید یک ارزیابی اولیه از «خطرات» ارائه دهد. این مناطق خطر بالقوه متعاقباً توسط یک متخصص مورد تجزیه و تحلیل قرار خواهند گرفت، که باید ارزیابی دقیق تری از سایت ارائه دهد، و به دنبال حرکت زمین در یک منطقه بزرگ از سیلاب است. چنین لایههایی میتوانند از کار هیدرولوژیستها پشتیبانی کنند، اگر عکسهای ارتوفوتو و DTM برای هر دو دوره زمانی تحلیلشده در دسترس باشند. بر اساس نتایج نشاندادهشده در شکل 9 و شکل 10 ، چند مکان که نشاندهنده تغییرات در ساخت سیلاب هستند پیدا شد. در شکل 10 ، نمایه ای که تفاوت ارتفاع بین دو دوره (UAS DTM و ALS DTM) را در خاکریز نشان می دهد نشان داده شده است. که درشکل 10 ، در مستطیل های آبی، یک ناحیه مشخص شده است. اینها نتایج تجزیه و تحلیل است که نشان دهنده یک خطر بالقوه است. این مناطق بر اساس رویکرد مفروض، یعنی DTM دیفرانسیل و کلاس زمینی پوشش گیاهی “جدید” یافت شدند. در این مکانها، هم اختلاف ارتفاع و هم زمین بدون پوشش گیاهی جدید اتفاق افتاد ( شکل 9 )، حتی اگر دادههای مرجع ALS سه سال قبل از دادههای هوایی نوری جمعآوری شدند. در این مورد، جمع آوری داده های واقعی بسیار مهم است. نمایه در شکل 10فرض مربوط به لغزش یک سمت خاکریز، شفت خاکریز و تغییرات تصادفی ارتفاع ناشی از فعالیت حیوان یا انسان را تأیید می کند. در منطقه آزمایشی مورد تجزیه و تحلیل، ده ها آسیب تایید شد و همه آنها با روش ارائه شده نشان داده و تایید شد که مفید بودن آن را تایید می کند.
4. بحث
استفاده از DTM های دیفرانسیل از LiDAR و تصاویر هوایی در فهرست زمین لغزش روش های شناخته شده ای هستند [ 23 ، 25 ]. به دلیل وضوح بالاتر داده های UAS، این فناوری اخیراً به پایش فرسایش معرفی شده است. مطالعات قبلی از DSM ها از تصاویر با وضوح بالا برای اندازه گیری خودکار فرسایش در خاک لس استفاده کرده اند [ 17 ]. در کاربردهای دیگر، مدلهای زمین دیجیتال و تصاویر ارتو از UAS نیز استفاده شد [ 15 ]. در رویکرد خود، ما پردازش و تجزیه و تحلیل جداگانه ای را برای داده های نوری و ارتفاع ناشی از UAS به عنوان ابزاری برای پشتیبانی از سیستم SAFEDAM اعمال کردیم [ 6 ، 21 ]]. ما نشان دادیم که چگونه این روش به یافتن مکانهای بالقوه خرابی خاکریز کمک میکند. تمام آسیبهای شناساییشده که به صورت دستی اندازهگیری شدهاند، با الگوریتم پیشنهادی، نشاندادهشده با تجزیه و تحلیل DTMهای دیفرانسیل و با استفاده از شاخص GRVI که اطلاعاتی در مورد مناطق زیر پوشش گیاهی «جدید» ارائه میدهد، پیدا شدند.
با توجه به این واقعیت که تمام نتایج آسیبهای احتمالی شناسایی شده باید به صورت دستی تأیید یا در یک میدان اندازهگیری شوند، تصمیم گرفتیم یک ابزار نیمه خودکار ساده برای نظارت بر خاکریز توسعه دهیم. نتایج ارائه شده نشان داد که پتانسیل بالایی در استفاده از داده های UAS در پایش فرسایش وجود دارد.
نظارت بر فرسایش و تغییرات بر اساس DTM ها، به ویژه در مناطقی که پوشش گیاهی ندارند، با فرض داده های دقیق و چند زمانی، کار چندان پیچیده ای نیست. چالش ممکن است در در نظر گرفتن پوشش گیاهی در تجزیه و تحلیل و استفاده از شاخص های پوشش گیاهی باشد. در تجزیه و تحلیل پوشش گیاهی و تشخیص، نوار نزدیک به مادون قرمز بسیار مهم است. با این حال، در [ 28 ]، استفاده از شاخص های مبتنی بر تصاویر RGB در تخمین زیست توده بسیار امیدوارکننده نشان داده شد. در [ 16 ]، تأثیر عوامل مختلف بر مقادیر شاخص ها از تصاویر RGB مورد بررسی قرار گرفت. به نظر می رسد شاخص GRVI بیشترین تغییرات دقت مرتبط با ارتفاع پرواز را نشان می دهد. در تحقیقات دیگر [ 26]، شاخص GRVI در نشان دادن فنولوژی پوشش گیاهی، به ویژه برای رنگ آمیزی برگ های پاییزی مفید بود. آنچه که با توجه به مقالات ذکر شده شایان ذکر است، وجود مشکل در تعیین یک مقدار آستانه در تجزیه و تحلیل پوشش گیاهی است. این به دلیل مقادیر شاخص بسته به همه شرایط هنگام گرفتن تصاویر، از نور و حتی ارتفاع پرواز است. نتایج مشابهی را می توان از آزمایش شرح داده شده در این مقاله گرفت. بنابراین، در وظیفه تشخیص پوشش گیاهی / مناطق غیر گیاهی، نمی توان یک مقدار آستانه GRVI را تعیین کرد. چند عامل وجود دارد که بر تعیین آستانه GRVI تأثیر می گذارد. عامل اصلی زمان به دست آوردن تصاویر است. در هوای خشک، وضعیت پوشش گیاهی بدتر می شود. در نتیجه، پوشش گیاهی خشک نیز ممکن است به عنوان زمین بدون پوشش با استفاده از شاخص GRVI طبقه بندی شود. علاوه بر این، با تجزیه و تحلیل داده های مورد استفاده در این رویکرد، تفاوت هایی در وضوح تصویر نیز وجود داشت. وضوح تصویر ارتوفوتو هوایی 0.25 متر بود و ارتفتو UAS با اندازه پیکسل 0.10 متر مشخص می شود که ممکن است بر مقدار آستانه GRVI نیز تأثیر بگذارد.
اگرچه UAS LiDAR محبوبتر میشود، اما بیشتر تصاویر از UAS گرفته شدهاند. روش ارائه شده در این مقاله یکی از اولین رویکردهایی است که در آن از تصاویر UAS و LiDAR برای تشخیص آسیب هایی مانند فرسایش استفاده می شود. در ژو [ 11 ]، توضیح داده شد که آسیب های کوچک چند سانتی متری می تواند باعث فرسایش داخلی شود. با این حال، تشخیص چنین تفاوت های دقیق بین دو مجموعه داده با توجه به خطاهای جهت گیری برای هر دو منبع داده بسیار دشوار است: فتوگرامتری و LiDAR. با توجه به اینکه دقت داده های ULS بهتر از 0.10 متر است [ 18 , 19 ]]، تشخیص تغییرات ارتفاعی در اندازه 0.15-0.20 متر با استفاده از مجموعه داده های چندموقت امکان پذیر است. تشخیص تغییر ارتفاع زیر 10 سانتیمتر بسیار چالشبرانگیز است، بنابراین، آستانهای 25 سانتیمتری برای نشان دادن مناطقی انتخاب شد که تحتتاثیر فیلترینگ ابر نقطهای نادرست یا نفوذ ضعیف از طریق پوشش گیاهی قرار نگرفتهاند. بر اساس آزمایش انجام شده، تشخیص آسیب در ساختار آبگیر با استفاده از دادههای سنجش از راه دور میتواند از کار متخصصانی پشتیبانی کند که باید بدون رویههای کاملاً خودکار بر روی آبریزها نظارت کنند.
5. نتیجه گیری ها
در این مقاله، روش تشخیص عیوب در لبه ها با استفاده از تصاویر RGB و ابرهای نقطه ای LiDAR از یک پلت فرم هوابرد (از جمله UAS) ارائه شده است. داده های مورد استفاده در آزمایش در دو دوره مختلف به دست آمد. در روش شناسی، دو جنبه مورد تجزیه و تحلیل قرار گرفت: تفاوت ارتفاع و تغییرات در پوشش زمین. در هنگام تولید DTM ها، مهم است که طبقه زمین را به درستی تشخیص دهیم. در غیر این صورت، تفاوت زیاد در مدل دیفرانسیل به اشتباه نشان دهنده خطر خواهد بود. برای شناسایی تغییرات پوشش زمین از شاخص GVRI استفاده شد. برای تشخیص طبقه زمین بدون پوشش گیاهی، یک مقدار آستانه باید انتخاب شود. آستانه ممکن است برای تصاویر مختلف (سنسورهای مختلف، زمان، تاریخ، وضعیت پوشش گیاهی، آب و هوا و غیره) متفاوت باشد. بنابراین، انتخاب یک مقدار توصیه نمی شود، بلکه برای فعال کردن انتخاب دستی مناسب ترین مقدار آستانه به منظور شناسایی زمین بدون پوشش گیاهی. علاوه بر این، ممکن است برخی تفاوتهای دیگر در سطوح تحلیلشده وجود داشته باشد، به عنوان مثال، ممکن است متفاوت ساخته شوند، ممکن است آسیبی وجود داشته باشد یا ممکن است تغییراتی در ساختار لایهها بین جمعآوری دادهها وجود داشته باشد. بنابراین، یک رویکرد تحلیل فردی برای هر منطقه می تواند توصیه شود. سپس هدف روش ارائه دادههای قابل اعتماد است که نتیجه پردازش DTM و orthoimage از دو دوره است. این امر امکان تشخیص تغییرات و آسیبهای احتمالی در ناحیه خاکریز را با استفاده از DTM دیفرانسیل و لایهی زیر پوشش گیاهی «جدید» استخراجشده ممکن میسازد. بنابراین ناظر در ابتدا باید توجه خود را بر روی این مکان ها متمرکز کند. ممکن است برخی تفاوتهای دیگر در سطوح آنالیز شده وجود داشته باشد، به عنوان مثال، آنها ممکن است متفاوت ساخته شوند، ممکن است برخی آسیبها وجود داشته باشد یا ممکن است تغییراتی در ساختار لایهها بین جمعآوری دادهها وجود داشته باشد. بنابراین، یک رویکرد تحلیل فردی برای هر منطقه می تواند توصیه شود. سپس هدف روش ارائه دادههای قابل اعتماد است که نتیجه پردازش DTM و orthoimage از دو دوره است. این امر امکان تشخیص تغییرات و آسیبهای احتمالی در ناحیه خاکریز را با استفاده از DTM دیفرانسیل و لایهی زیر پوشش گیاهی «جدید» استخراجشده ممکن میسازد. بنابراین ناظر در ابتدا باید توجه خود را بر روی این مکان ها متمرکز کند. ممکن است برخی تفاوتهای دیگر در سطوح آنالیز شده وجود داشته باشد، به عنوان مثال، آنها ممکن است متفاوت ساخته شوند، ممکن است برخی آسیبها وجود داشته باشد یا ممکن است تغییراتی در ساختار لایهها بین جمعآوری دادهها وجود داشته باشد. بنابراین، یک رویکرد تحلیل فردی برای هر منطقه می تواند توصیه شود. سپس هدف روش ارائه دادههای قابل اعتماد است که نتیجه پردازش DTM و orthoimage از دو دوره است. این امر امکان تشخیص تغییرات و آسیبهای احتمالی در ناحیه خاکریز را با استفاده از DTM دیفرانسیل و لایهی زیر پوشش گیاهی «جدید» استخراجشده ممکن میسازد. بنابراین ناظر در ابتدا باید توجه خود را بر روی این مکان ها متمرکز کند. یک رویکرد تحلیل فردی برای هر منطقه می تواند توصیه شود. سپس هدف روش ارائه دادههای قابل اعتماد است که نتیجه پردازش DTM و orthoimage از دو دوره است. این امر امکان تشخیص تغییرات و آسیبهای احتمالی در ناحیه خاکریز را با استفاده از DTM دیفرانسیل و لایهی زیر پوشش گیاهی «جدید» استخراجشده ممکن میسازد. بنابراین ناظر در ابتدا باید توجه خود را بر روی این مکان ها متمرکز کند. یک رویکرد تحلیل فردی برای هر منطقه می تواند توصیه شود. سپس هدف روش ارائه دادههای قابل اعتماد است که نتیجه پردازش DTM و orthoimage از دو دوره است. این امر امکان تشخیص تغییرات و آسیبهای احتمالی در ناحیه خاکریز را با استفاده از DTM دیفرانسیل و لایهی زیر پوشش گیاهی «جدید» استخراجشده ممکن میسازد. بنابراین ناظر در ابتدا باید توجه خود را بر روی این مکان ها متمرکز کند.
آزمایش نشان داده است که روش به درستی کار می کند. علاوه بر این، روش پیشنهادی پتانسیل زیادی را نشان میدهد زیرا نتایج را نمیتوان تحت تأثیر شرایط موجود، زمان اکتساب دادهها یا با استفاده از انواع مختلف حسگرها قرار داد. با این حال، باید تاکید کرد که اجرای روش به صورت خودکار نخواهد بود. نتایج باید توسط متخصصان هیدرولوژی، که پس از نشان دادن آسیب احتمالی با استفاده از روش ارائه شده، دانش بهتری در مورد ساختار خاکریز دارند، تأیید شود. بسیاری از رویکردهای پیچیده را می توان در این برنامه در مورد طبقه بندی خودکار تشخیص تغییر توسعه داد. رویکردهای فعلی تشخیص تغییر بر اساس سه باند از تصویر RGB و شطرنجی ارتفاع برای تشخیص قابل اعتماد کافی نیستند. با این اوصاف، تجزیه و تحلیل غیر از آنچه در این مقاله ارائه شده است، بر اساس رسترهای دیفرانسیل DTM و تشخیص مناطق زمینی بدون پوشش گیاهی جدید، می تواند در برخی روش شناسی خودکار گنجانده شود. در جستجوی روشی برای تشخیص سطوح بدون پوشش گیاهی، میتوان مدل سطح دیجیتال نرمال شده (nDSM) و sigma0 را تحلیل کرد که یک شاخص هندسی است که توزیع عمودی ابر نقطه را نشان میدهد. همچنین امکان استفاده از اطلاعات مربوط به شدت پرتو لیزر وجود دارد. چنین رویکردهایی میتوانند برای تحلیل چندموقتی مدلهای ارتفاعی و تصاویر ارتو دشوارتر باشند. همچنین پیادهسازی آنها در ابزارهای اختصاص داده شده به متخصصانی که معمولاً با دادههای مکانی کار نمیکنند، دشوار است. ما قویاً معتقدیم که این موضوعات موضوع خوبی برای بحث در کارهای آینده است. بر اساس رسترهای دیفرانسیل DTM و تشخیص مناطق زیر پوشش گیاهی جدید، میتوان در برخی روششناسی خودکار گنجانده شد. در جستجوی روشی برای تشخیص سطوح بدون پوشش گیاهی، میتوان مدل سطح دیجیتال نرمال شده (nDSM) و sigma0 را تحلیل کرد که یک شاخص هندسی است که توزیع عمودی ابر نقطه را نشان میدهد. همچنین امکان استفاده از اطلاعات مربوط به شدت پرتو لیزر وجود دارد. چنین رویکردهایی میتوانند برای تحلیل چندموقتی مدلهای ارتفاعی و تصاویر ارتو دشوارتر باشند. همچنین پیادهسازی آنها در ابزارهای اختصاص داده شده به متخصصانی که معمولاً با دادههای مکانی کار نمیکنند، دشوار است. ما قویاً معتقدیم که این موضوعات موضوع خوبی برای بحث در کارهای آینده است. بر اساس رسترهای دیفرانسیل DTM و تشخیص مناطق زیر پوشش گیاهی جدید، میتوان در برخی روششناسی خودکار گنجانده شد. به دنبال روشی برای تشخیص سطوح غیر پوشش گیاهی، می توان مدل سطح دیجیتال نرمال شده (nDSM) و sigma0 را که یک شاخص هندسی است که توزیع عمودی ابر نقطه را نشان می دهد، تجزیه و تحلیل کرد. همچنین امکان استفاده از اطلاعات مربوط به شدت پرتو لیزر وجود دارد. چنین رویکردهایی میتوانند برای تحلیل چندموقتی مدلهای ارتفاعی و تصاویر ارتو دشوارتر باشند. همچنین پیادهسازی آنها در ابزارهای اختصاص داده شده به متخصصانی که معمولاً با دادههای مکانی کار نمیکنند، دشوار است. ما قویاً معتقدیم که این موضوعات موضوع خوبی برای بحث در کارهای آینده است. می تواند در برخی از روش شناسی خودکار گنجانده شود. به دنبال روشی برای تشخیص سطوح غیر پوشش گیاهی، می توان مدل سطح دیجیتال نرمال شده (nDSM) و sigma0 را که یک شاخص هندسی است که توزیع عمودی ابر نقطه را نشان می دهد، تجزیه و تحلیل کرد. همچنین امکان استفاده از اطلاعات مربوط به شدت پرتو لیزر وجود دارد. چنین رویکردهایی میتوانند برای تحلیل چندموقتی مدلهای ارتفاعی و تصاویر ارتو دشوارتر باشند. همچنین پیادهسازی آنها در ابزارهای اختصاص داده شده به متخصصانی که معمولاً با دادههای مکانی کار نمیکنند، دشوار است. ما قویاً معتقدیم که این موضوعات موضوع خوبی برای بحث در کارهای آینده است. می تواند در برخی از روش شناسی خودکار گنجانده شود. به دنبال روشی برای تشخیص سطوح غیر پوشش گیاهی، می توان مدل سطح دیجیتال نرمال شده (nDSM) و sigma0 را که یک شاخص هندسی است که توزیع عمودی ابر نقطه را نشان می دهد، تجزیه و تحلیل کرد. همچنین امکان استفاده از اطلاعات مربوط به شدت پرتو لیزر وجود دارد. چنین رویکردهایی میتوانند برای تحلیل چندموقتی مدلهای ارتفاعی و تصاویر ارتو دشوارتر باشند. همچنین پیادهسازی آنها در ابزارهای اختصاص داده شده به متخصصانی که معمولاً با دادههای مکانی کار نمیکنند، دشوار است. ما قویاً معتقدیم که این موضوعات موضوع خوبی برای بحث در کارهای آینده است. که یک شاخص هندسی است که توزیع عمودی ابر نقطه را نشان می دهد. همچنین امکان استفاده از اطلاعات مربوط به شدت پرتو لیزر وجود دارد. چنین رویکردهایی میتوانند برای تحلیل چندموقتی مدلهای ارتفاعی و تصاویر ارتو دشوارتر باشند. همچنین پیادهسازی آنها در ابزارهای اختصاص داده شده به متخصصانی که معمولاً با دادههای مکانی کار نمیکنند، دشوار است. ما قویاً معتقدیم که این موضوعات موضوع خوبی برای بحث در کارهای آینده است. که یک شاخص هندسی است که توزیع عمودی ابر نقطه را نشان می دهد. همچنین امکان استفاده از اطلاعات مربوط به شدت پرتو لیزر وجود دارد. چنین رویکردهایی میتوانند برای تحلیل چندموقتی مدلهای ارتفاعی و تصاویر ارتو دشوارتر باشند. همچنین پیادهسازی آنها در ابزارهای اختصاص داده شده به متخصصانی که معمولاً با دادههای مکانی کار نمیکنند، دشوار است. ما قویاً معتقدیم که این موضوعات موضوع خوبی برای بحث در کارهای آینده است.
استفاده از سیستم هوایی بدون سرنشین در مقایسه با فتوگرامتری در ارتفاع بالا مزایای زیادی دارد. داده ها را می توان بیشتر به دست آورد، و این روش یک جایگزین مقرون به صرفه تر است. یک UAS میتواند دادههای با کیفیتتری را در مقایسه با دادههای هوابرد ارائه دهد: تراکم ابر نقطه LiDAR بالاتر و تصاویر با وضوح فضایی بالاتر. در سیستمهایی که هدفشان ایجاد نقشههای ساده پوشش زمین بر اساس طبقهبندی و با استفاده از شاخص پوشش گیاهی است، وضوح میتواند به شناسایی مکانهای دیدنی با مساحت کوچک کمک کند. در رویکرد پیشنهادی، تجزیه و تحلیل به رستر ختم می شود که یک لایه اضافی برای متخصص است. این روش به ظاهر ساده مشکل تفکیک داده های مکانی را نیز حل می کند، زیرا مقادیر شاخص یکسان را نمی توان برای مجموعه داده های به دست آمده با حسگرهای مختلف استفاده کرد.
منابع
- Tralli، DM; بلوم، آر جی. زلوتنیکی، وی. دانلان، ا. Evans، DL سنجش از دور ماهواره ای خطرات زلزله، آتشفشان، سیل، رانش زمین و آبگرفتگی ساحلی. ISPRS J. Photogramm. Remote Sens. 2005 ، 59 ، 185-198. [ Google Scholar ] [ CrossRef ]
- کوسول، ن. اسکاکون، س. شلستوف، آ. لاورنیوک، م. یایلیموف، بی. Kussul، O. نقشه برداری محصول در مقیاس منطقه ای با استفاده از تصاویر ماهواره ای چند زمانی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، 40 ، 45-52. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وینتریت، بی. Osińska-Skotak، K. Pilarska، M. مطالعه امکان سنجی پایش خطر سیل بر اساس داده های ماهواره ای نوری. متفرقه Geogr. 2018 ، 22 ، 172-180. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ین، BC هیدرولیک و اثربخشی سیل برای کنترل سیل. در کارگاه تحقیقاتی ایالات متحده و ایتالیا در مورد آب و هواشناسی، اثرات و مدیریت سیلاب های شدید. 1995. در دسترس آنلاین: https://www.engr.colostate.edu/ce/facultystaff/salas/us-italy/papers/44yen.pdf (دسترسی در 14 آوریل 2020).
- لانگ، جی. ماودسلی، ام جی; اسمیت، ام. طه، الف. شبیه سازی LiDAR هوابرد برای ارزیابی نقش آن در نظارت بر دارایی زیرساخت. در مجموعه مقالات کنفرانس بین المللی محاسبات در مهندسی عمران و ساختمان ; Tizani, W., Ed. انتشارات دانشگاه ناتینگهام: ناتینگهام، انگلستان، 2010. [ Google Scholar ]
- کورچینسکی، ز. Bakuła، K. SAFEDAM-zaawansowane technologie wspomagające przeciwdziałanie zagrożeniom związanym z powodziami. قوس. فوتوگرام. کارتوگر. Teledetekcji 2016 ، 28 ، 39–52. [ Google Scholar ]
- تورنادر، وی. پیروت-دسیلینی، ام. فور، فتوگرامتری پهپاد PH برای نظارت بر کالیبراسیون دایک و مقایسه با لیدار زمینی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 ، 40 ، 143. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ژو، ی. روپنیک، ای. Faure، PH; جهت گیری حسگر یکپارچه با کمک GNSS Pierrot-Deseilligny با پیش کالیبراسیون سنسور برای نقشه برداری دقیق راهرو. Sensors 2018 , 18 , 2783. [ Google Scholar ] [ CrossRef ][ Green Version ]
- باکولا، ک. اوستروفسکی، دبلیو. Szender، M. پلوتکی، دبلیو. سالاچ، ا. Górski، K. امکانات برای استفاده از دادههای لیدار و فتوگرامتری بهدستآمده با یک هواپیمای بدون سرنشین برای نظارت بر آبریزها. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، 41 ، 773-780. [ Google Scholar ] [ CrossRef ]
- Baltsavias، EP مقایسه بین فتوگرامتری و اسکن لیزری. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 83-94. [ Google Scholar ] [ CrossRef ]
- Zhou، Y. اندازهشناسی 100% خودکار با فتوگرامتری پهپاد و GPS تعبیهشده و کاربرد آن در نظارت دایک. دکتری پایان نامه، Université Paris-Est، پاریس، فرانسه، 2019. [ Google Scholar ]
- برنی، JAJ; Zarco-Tejada، PJ; سوارز، ال. گونزالس-دوگو، وی. Fereres، E. سنجش از راه دور پوشش گیاهی از سکوهای پهپاد با استفاده از سنسورهای تصویربرداری حرارتی و چندطیفی سبک وزن. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. آگاه کردن. علمی 2009 ، 38 ، 6. [ Google Scholar ]
- هانت، ای آر. Hively، WD; فوجیکاوا، اس. لیندن، دی. Daughtry، CS; مک کارتی، جی. تهیه عکس های دیجیتال NIR-سبز-آبی از هواپیماهای بدون سرنشین برای نظارت بر محصول. Remote Sens. 2010 , 2 , 290-305. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تورس سانچز، جی. لوپز-گرانادوس، اف. Peña, JM یک روش خودکار مبتنی بر شی برای آستانه گذاری بهینه در تصاویر پهپاد: کاربرد برای تشخیص پوشش گیاهی در محصولات علفی. محاسبه کنید. الکترون. کشاورزی 2015 ، 114 ، 43-52. [ Google Scholar ] [ CrossRef ]
- D’Oleire-Oltmanns، S. مارزولف، آی. پیتر، KD; ریس، هواپیمای بدون سرنشین JB (UAV) برای نظارت بر فرسایش خاک در مراکش. Remote Sens. 2012 , 4 , 3390–3461. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تورس سانچز، جی. پنیا، جی.ام. د کاسترو، هوش مصنوعی؛ López-Granados، F. نقشه برداری چند زمانی از بخش پوشش گیاهی در مزارع گندم در اوایل فصل با استفاده از تصاویر پهپاد. محاسبه کنید. الکترون. کشاورزی 2014 ، 103 ، 104-113. [ Google Scholar ] [ CrossRef ]
- التنر، ا. باومگارت، پ. ماس، اچ. Faust, D. دادههای پهپاد چند زمانی برای اندازهگیری خودکار فرسایش شیاری و بینشیاری در خاک لس. زمین گشت و گذار. روند. Landforms 2015 ، 40 ، 741-755. [ Google Scholar ] [ CrossRef ]
- باکولا، ک. اوستروفسکی، دبلیو. پیلارسکا، ام. Szender، M. Kurczyński، Z. ارزیابی و کالیبراسیون سیستم نقشه برداری تلفن همراه چندحسگر بال ثابت: نتایج بهبود یافته. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، 42 ، 189-195. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سالاچ، ا. باکولا، ک. پیلارسکا، ام. اوستروفسکی، دبلیو. گورسکی، ک. Kurczyński، Z. ارزیابی دقت ابرهای نقطه از LiDAR و تطبیق تصویر متراکم با استفاده از پلتفرم پهپاد برای ایجاد DTM. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 342. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- والاس، ال. لوسییر، آ. Malenovskỳ، Z. ترنر، دی. Vopěnka، P. ارزیابی ساختار جنگل با استفاده از دو تکنیک UAV: مقایسه اسکن لیزری هوابرد و ساختار از ابرهای نقطه حرکت (SfM). Forests 2016 ، 7 ، 62. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وینتریت، بی. باکولا، ک. جدریکا، م. بیجک، دبلیو. اوستروفسکی، دبلیو. Wziątek، DZ; آنکوفسکی، ا. Kurczyński، Z. مدیریت نجات اضطراری با پشتیبانی از داده های سنجش از راه دور پهپاد. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، 42 ، 563-567. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کورچینسکی، ز. Bakuła، K. انتخاب پارامترهای اسکن لیزری هوایی برای ایجاد مدل ارتفاعی دیجیتال در سراسر کشور. در مجموعه مقالات سیزدهمین کنفرانس جغرافیایی SGEM انفورماتیک، ژئوانفورماتیک و سنجش از دور، آلبنا، بلغارستان، 16 تا 22 ژوئن 2013. جلد 2، ص 695–702. [ Google Scholar ]
- دیویت، او. Jasselette, JC; کورنت، ی. ون دن ایکهات، ام. کولینیون، آ. پوسن، جی. دمولین، الف. ردیابی جابجایی های زمین لغزش توسط DTM های چند زمانی: یک رویکرد ترکیبی استریوفتوگرامتری هوایی و LIDAR در غرب بلژیک. مهندس جئول 2008 ، 99 ، 11-22. [ Google Scholar ] [ CrossRef ]
- علامند، پ. دلاکورت، سی. گاسپرینی، دی. کسپرسکی، جی. Pothérat، P. سی سال تکامل زمین لغزش سدرون (سوئیس) از تصاویر هوایی چندزمانی، مدلهای زمین دیجیتال دیفرانسیل و دادههای میدانی. بین المللی J. Remote Sens. Appl. 2011 ، 1 ، 30-36. [ Google Scholar ]
- زیهر، تی. پرزل، اف. راسل، ام. روتزینگر، ام. میسل، جی. مارکارت، جی. گیتنر، سی. فهرست زمین لغزش چند ساله برای ارزیابی حساسیت زمین لغزش کم عمق – دو مورد آزمایشی در فورارلبرگ، اتریش. ژئومورفولوژی 2016 ، 259 ، 40-54. [ Google Scholar ] [ CrossRef ]
- موتوکا، تی. ناساهارا، KN; اوگوما، اچ. Tsuchida، S. کاربرد شاخص گیاهی سبز-قرمز برای سنجش از دور فنولوژی گیاهی. Remote Sens. 2010 , 2 , 2369–2387. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ناگای، اس. Saitoh، TM; کوبایاشی، ح. ایشیهارا، م. سوزوکی، آر. موتوکا، تی. ناساهارا، KN; موراوکا، H. بررسی درجا رابطه بین شاخصهای مختلف پوشش گیاهی و فنولوژی تاج پوشش در یک جنگل همیشه سبز مخروطی، ژاپن. بین المللی J. Remote Sens. 2012 ، 33 ، 6202-6214. [ Google Scholar ] [ CrossRef ]
- بندیگ، جی. یو، ک. آسن، اچ. بولتن، آ. بنرتز، اس. بروشیت، جی. Gnyp، ML؛ Bareth, G. ترکیب ارتفاع گیاه مبتنی بر پهپاد از مدلهای سطح محصول، شاخصهای پوشش گیاهی مرئی و نزدیک به فروسرخ برای پایش زیست توده در جو. بین المللی J. Appl. زمین Obs. Geoinf. 2015 ، 39 ، 79-87. [ Google Scholar ] [ CrossRef ]
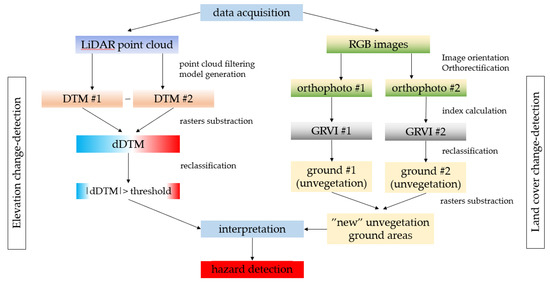
شکل 1. روش شناسایی یک منطقه خطر آبریز بر اساس داده های UAS و فتوگرامتری ارتفاع بالا. LiDAR: تشخیص نور و محدوده. RGB: قرمز، سبز، آبی؛ DTM: مدل دیجیتالی زمین. dDTM: دیفرانسیل DTM; GRVI: شاخص سبز-قرمز پوشش گیاهی.
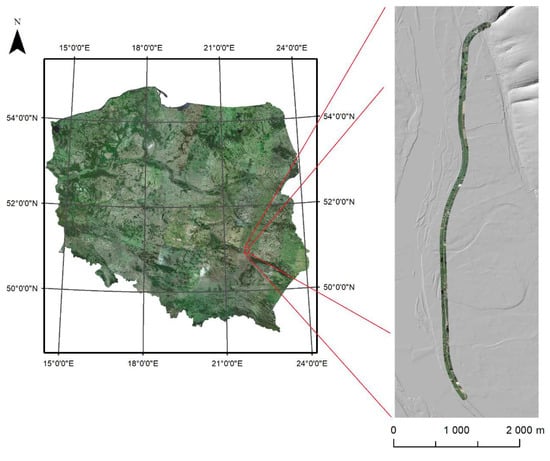
شکل 2. منطقه آزمایش Levee در Annopol در نزدیکی رودخانه Vistula (چند ضلعی پر قرمز)، ارائه شده در ارتوفوتو.

شکل 3. مدل های زمین دیجیتال تولید شده از اسکن لیزری هوابرد (ALS) و داده های ULS با مدل دیفرانسیل محاسبه شده ارتفاع.
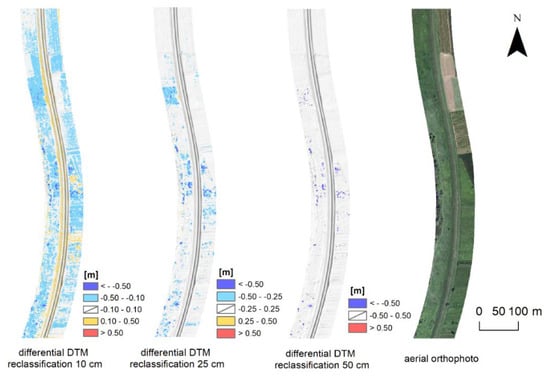
شکل 4. نتایج طبقه بندی مجدد DTM دیفرانسیل با استفاده از مقادیر آستانه متمایز (0.10 متر، 0.25 متر و 0.50 متر) و یک عکس ارتو (2015) از منطقه آزمایش.
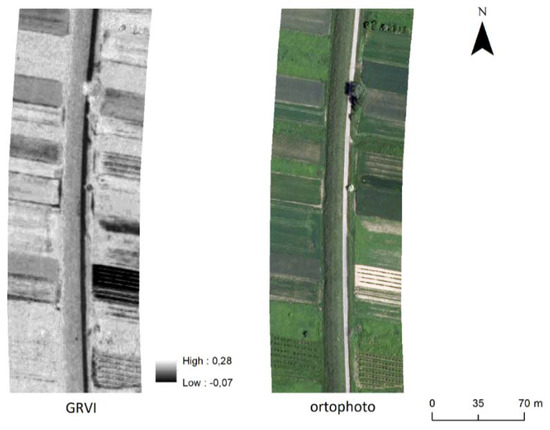
شکل 5. نمونه ای از GRVI محاسبه شده از تصاویر RGB هوایی در مقایسه با ارتفوتو (تصاویر هوایی: ژوئن 2015، تصاویر UAS: می 2017).
شکل 6. نمونه ای از چند ضلعی های مرجع مورد استفاده در بهترین تعیین آستانه GRVI (چند ضلعی های قرمز – تصاویر هوایی، چند ضلعی های آبی – تصاویر UAS).

شکل 7. منحنی هایی که درصد زمین شناسایی شده را در تصاویر UAS (مه 2017) و هوایی (ژوئن 2015) برای مقادیر آستانه انتخاب شده نشان می دهد.
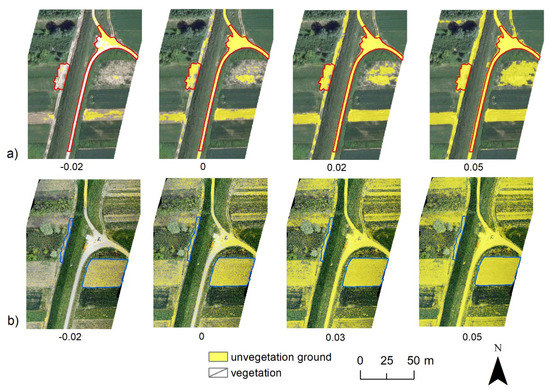
شکل 8. تجسم آستانه های انتخاب شده GRVI محاسبه شده از تصاویر هوایی ( a ) و UAS ( b ).
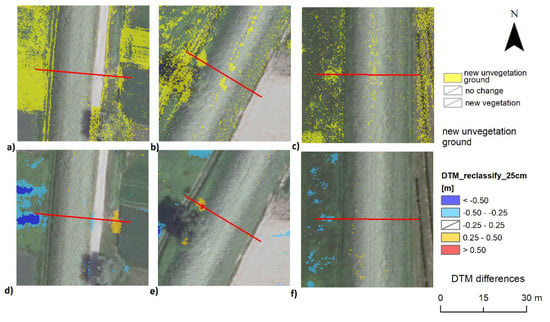
شکل 9. مثال نمایه ارائه شده در کلاس جدید پوشش گیاهی ( a – c ) و تفاوت های DTM ( d – f ) که منجر به خطر بالقوه برای خاکریز (لغزش زمین) برای سه مثال می شود.
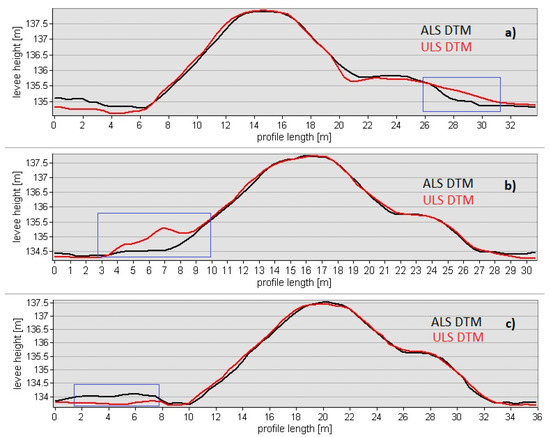
شکل 10. نمایه هایی که سه نمونه از تفاوت بین DTM های شناسایی شده در DTM دیفرانسیل و طبقه زمین پوشش گیاهی جدید را با نشان دهنده خطر بالقوه مربوط به لغزش شفت خاکریز ( a )، لغزش سمت خاکریز ( b ) و تغییرات ارتفاعی تصادفی نشان می دهد. ( ج ) در دو بعد در شکل 9 ارائه شده است .


بدون دیدگاه