1. معرفی
ناوبری وسایل نقلیه هوایی بدون سرنشین (UAV) در محیط بیرون بیشتر با استفاده از سیستم های ماهواره ای ناوبری جهانی (GNSS) و به ویژه با استفاده از سیستم موقعیت یاب جهانی (GPS) انجام می شود [ 1 ، 2 ، 3 ]. با وجود قابلیت مناسب GPS، این سیستم مستعد مشکلاتی است. GPS به عنوان مستعد تداخلات فرکانس رادیویی عمدی و غیرعمدی (RFI) شناخته شده است [ 4 ، 5 ، 6 ]. دو آسیبپذیری عمدی اصلی عبارتند از پارازیت و جعل GPS و دومی یک تهدید بزرگ برای کاربران غیرنظامی GPS است [ 6 ، 7 ، 8 ]]. پارازیت به انتقال عمدی انرژی فرکانس رادیویی برای جلوگیری از سرویس ناوبری با پوشاندن سیگنالهای GPS با استفاده از نویز اشاره دارد [ 6 ]. جعل جی پی اس انتقال سیگنال های جی پی اس تقلبی و جعلی بدون ایجاد اختلال در عملکرد GPS است و قصد دارد موقعیت و زمان جعلی را در گیرنده هدف ایجاد کند [ 6 ، 9 ، 10 ]. بر خلاف حملات پارازیت، که ممکن است گیرنده GPS را از موقعیت یابی بازدارد، در حملات جعل GPS، عملیات موقعیت یابی به طور معمول انجام می شود و موقعیت های جعلی GPS تولید می شود. بنابراین با استفاده از جعل GPS می توان با موفقیت یک پهپاد غیرنظامی را جعل کرد و مسیر پرواز و مقصد آن را بدون اطلاع کاربر از مسیرهای از پیش تعریف شده تغییر داد.
برخی از مطالعات جعل موفقیت آمیز پهپادها با سخت افزار کم هزینه را با استفاده از جعل GPS نشان داده اند [ 10 ، 11 ، 12 ، 13 ، 14 ]. شپرد و همکاران در [ 11 ] نشان داد که یک جعل GPS می تواند مکان و مرجع زمانی یک پهپاد غیرنظامی را تغییر دهد. در [ 10 ]، کرنز و همکاران. شرایط یک حمله جعل موفقیت آمیز به یک پهپاد را تشریح کرد و امکان عملیاتی و فنی یک حمله مخرب جعل GPS را در یک میدان آزمایشی نشان داد. طی یک کارگاه آموزشی در بیست و سومین کنفرانس Defcon، هوانگ موفق شد یک DJI Phantom 3 را از طریق جعل GPS بر اساس رادیو تعریف شده نرم افزار (SDR) جعل کند [ 15 ]]. اریک هورتون و پراکاش رانگاناتان یک جعل GPS کم هزینه و سطح بالا را برای جعل کوادکوپتر DJI Matrice 100 به تفصیل، توسعه و با موفقیت پیاده سازی کردند [ 12 ]. لی و همکاران یک جعل GPS طراحی و اجرا کرد و یک آزمایش میدانی را با موفقیت انجام داد و یک پهپاد در سطح مصرف کننده را در موقعیت جعلی فرود آورد [ 13 ]. در [ 14 ]، یک سیستم دفاعی ضد پهپاد مبتنی بر جعل GPS ارائه و در میدان آزمایش شد که قادر بود یک پهپاد غیرهمکار را از راه دور کنترل و به مکان مشخصی دور کند. یک روش جعل مخفی GPS از پهپادها در [ 16 ] توسعه یافت]، که مبنای نظری و راه حل خوبی برای جعل پهپاد در یک ناوبری GPS/INS (سیستم ناوبری اینرسی) یکپارچه ارائه کرد. بر اساس ادبیات، میزان جعل پهپادهای غیرنظامی با استفاده از روشهای مختلف جعل GPS افزایش مییابد.
روشهای جعل GPS را میتوان به سه دسته اصلی تقسیم کرد: شبیهسازهای سیگنال GPS، جعلهای مبتنی بر گیرنده، و جعلهای مبتنی بر گیرنده پیچیده (SRB) [ 5 ، 6 ].]. در دسته اول، یک شبیهساز سیگنال GPS با یک فرکانس رادیویی جلویی به منظور تقلید سیگنالهای GPS معتبر متصل شده است. در این روش به همگام سازی سیگنال های جعلی با سیگنال های واقعی نیازی نیست. این ساده ترین روش جعل GPS است که می تواند گیرنده های GPS غیرنظامی را تحت تأثیر قرار دهد. دسته دوم پیشرفته تر است. این روش نیاز به یک گیرنده GPS دارد که با فرستنده جعلی الحاق شده باشد تا موقعیت، زمان، و زمانبندی ماهوارهها را استخراج کند تا سیگنالهای جعلی GPS را با سیگنالهای واقعی همگامسازی کند. تشخیص این نوع جعل دشوار است. دسته سوم مؤثرترین روش جعل است. در این نوع، موقعیت و سرعت مرکز فاز آنتن گیرنده قربانی به طور دقیق مشخص شده است.6 ].
تکنیک های ضد جعل را می توان به تکنیک های گیرنده مستقل GNSS (GRS) و گیرنده موقعیت یابی ترکیبی (HPR) [ 5 ، 6 ] تقسیم کرد. در تکنیکهای GRS، سیگنال دریافتی برای تعیین واقعی بودن یا نبودن آن پردازش میشود [ 5 ]. این تکنیکها بر اساس پردازش فضایی [ 17 ]، تمایز زمان رسیدن [ 18 ]، تجزیه و تحلیل توزیع خروجیهای همبسته [ 19 ]، دفاع از سیگنال باقیمانده [ 20 ، 21 ] و نظارت بر یکپارچگی مستقل گیرنده (RAIM) [ 6 ] هستند. ، 22 ]. جزئیات بیشتر را می توان در [ 5 , 21 ,23 ، 24 ، 25 ، 26 ، 27 ]. تکنیکهای ضد جعل GRS فقط به پردازش سیگنال GPS برای شناسایی و مقابله با حملات RFI متکی است و در استفاده از سختافزارهای پیشرفتهتر و روشهای پیچیدهتر توسط مهاجمان شکست خواهد خورد [ 6 ، 21 ، 28 ، 29 ، 30 ].
در تکنیک های HPR، داده های موقعیت کمکی از سایر سیستم های موقعیت یابی مانند INS [ 22 ، 31 ] و LBS (سرویس مبتنی بر مکان) یا سیستم های ارتباطی، مانند شبکه های سلولی [ 32 ] یا ایستگاه های Wi-Fi، به عنوان موقعیت یابی بی سیم سیستمهای [ 5 ] و سیستم موقعیتیابی مبتنی بر بینایی [ 33 ] برای تشخیص و کاهش جعل GPS استفاده میشوند [ 6 ]. تکنیک های فعلی HPR از برخی اشکالات رنج می برند. با استفاده از شبکه های LBS، سلولی و Wi-Fi به عنوان موقعیت کمکی، پوشش محدود این سیستم ها کاربرد تبعیض جعل را محدود می کند [ 5 ]]. تکنیک هایی که از اطلاعات INS به عنوان خدمات موقعیت یابی کمکی استفاده می کنند از کالیبراسیون و مقداردهی اولیه INS و همچنین از تأثیر اطلاعات جعلی GPS بر خروجی های GPS/INS ذوب شده رنج می برند [ 5 ]. علاوه بر این، اگر این سیستمهای کمکی به همگامسازی زمانی مبتنی بر GPS متکی باشند، باید از زمانبندی پشتیبان مناسب مستقل از زمانبندی GPS استفاده کنند. تاخیر زمانی این تکنیک ها یکی دیگر از اشکالات این سیستم های کمکی است.
در استفاده از روش های مبتنی بر بینایی به عنوان سیستم کمکی در تکنیک های ضد جعل HPR، از دوربین به عنوان حسگر کمکی استفاده می شود. از آنجایی که دوربین یک حسگر غیرفعال است، عملکرد آن مستقل از سیگنالهای GPS یا دیگران است. بنابراین، جعل GPS و سایر حملات RFI مانند پارازیت نمی تواند بر عملکرد آن تأثیر بگذارد. در [ 33 ]، برای اولین بار، یک روش مبتنی بر بینایی به عنوان یک سیستم کمک موقعیت برای تشخیص جعل GPS استفاده شد، اگرچه کیلومتر شماری بصری (VO) [ 34 ، 35 ، 36 ] و موقعیت مکانی و نقشه برداری بصری (VSLAM) [ 37 ، 38]، در ترکیب با سایر حسگرها از جمله واحد اندازه گیری اینرسی (IMU)، ارتفاع سنج، لیزر و رادار، قبلاً در ناوبری پهپاد استفاده می شد [ 10 ، 35 ].
در [ 33 ]، سرعت پهپاد از روی تصاویر پهپاد با استفاده از الگوریتم هرمی لوکاس-کاناد [ 39 ، 40 ] تعیین شد و با خروجی IMU در رویکرد فیلتر کالمن ادغام شد. سپس این سرعت با سرعت پهپاد از GPS مقایسه شد. این روش زمانی قابل اجرا نیست که کلاهبردار سرعت متوسط پهپاد را بداند و این را در تولید سیگنال های جعلی GPS در نظر بگیرد.
این مقاله یک روش تشخیص جعل پهپاد مبتنی بر دید را معرفی میکند که بر موقعیت نسبی پهپاد با استفاده از VO متکی است. از آنجایی که VSLAM به دلیل فرآیند تولید نقشه هزینه محاسباتی بالایی دارد [ 41 ، 42 ]. این روش برای تشخیص جعل پهپاد مناسب تر نیست. علاوه بر این، سنسورهای دیگری مانند LiDAR (تشخیص نور و محدوده)، ارتفاع سنج و رادار به دلیل هزینه و وزن بالا معمولاً در پهپادهای غیرنظامی استفاده نمی شوند.
مسیر نسبی پهپاد از موقعیت های نسبی آن با استفاده از VO تولید می شود. این مسیر با مسیر مطلق متناظر پهپاد قابل مقایسه است که با استفاده از GPS می توان به آن دست یافت. مقایسه این مسیرها با استفاده از برخی معیارهای عدم تشابه، وقوع جعل پهپاد را نشان می دهد. روش پیشنهادی مستقل از سنسورهای دیگر، مانند IMU، LIDAR، رادار، و ارتفاع سنج، هر گونه داده آرشیو شده، مانند مدل های دیجیتال ارتفاع (DEM) و تصاویر ماهواره ای، و هر گونه دانش از منطقه پرواز از پیش تعریف شده پهپاد یا موقعیت تقریبی پهپاد
تازگی این مقاله شامل معرفی یک روش تشخیص جعل پهپاد مبتنی بر دید است که تنها بر موقعیت نسبی پهپاد با استفاده از VO متکی است، مقایسه مسیرهای فرعی نسبی و مطلق پهپاد در یک رویکرد مبتنی بر پنجره، معرفی یک هیستوگرام اصلاح شده. توصیفگر مسیر جابجاییهای جهتدار (HOD) و استفاده از آن در مقایسه مسیرهای فرعی نسبی و مطلق پهپاد و معرفی سه معیار عدم تشابه برای تشخیص جعل پهپاد و تحلیل عملکرد آنها.
ادامه این مقاله به شرح زیر سازماندهی شده است: بخش 2 روش شناسی روش پیشنهادی برای تشخیص جعل پهپاد را معرفی می کند و اجرای آن را توضیح می دهد. نتایج و کارهای تجربی در بخش 3 ارائه شده اند و نتیجه گیری ها در بخش 4 آمده است.
2. تشخیص جعل پهپاد مبتنی بر دید
در این بخش ابتدا اثرات جعل GPS بر موقعیت یابی پهپاد را شرح می دهیم و سپس روش تشخیص جعل پهپاد مبتنی بر دید ما ارائه می شود. در مورد جعل SRB GPS، کلاهبردار از مکان آنی و مسیر و مقصد از پیش تعریف شده پهپاد آگاه است. علاوه بر این، اسپوفر میتواند سیگنالهای GPS جعلی را تولید و پخش کند به طوری که مسیر ایجاد شده از موقعیتهای جعلی GPS با مسیر از پیش تعریفشده پهپاد مطابقت داشته باشد. در نتیجه، در حالی که موقعیتهای بهدستآمده از سیگنالهای جعلی GPS، مسیر از پیش تعریفشده پهپاد را نشان میدهند، پهپاد جعلی مسیر جعلی دیگری را دنبال میکند و به مقصدی جعلی هدایت میشود. بنابراین، مسیر واقعی پهپاد و در نتیجه تصاویر گرفته شده از این مسیر با مسیر از پیش تعریف شده پهپاد مطابقت نخواهد داشت. پس از این،
روش پیشنهادی تشخیص جعل پهپاد مبتنی بر بینایی به دوربین پهپاد متکی است که یک حسگر غیرفعال است و عملکرد و تصاویر آن توسط سیگنالهای جعلی GPS تغییر نمیکند. بخشی از اطلاعاتی که می توان از تصاویر پهپاد استخراج کرد، مسیر نسبی پهپاد با استفاده از VO است. علاوه بر این، تصاویر پهپادها معمولاً با استفاده از موقعیتهای GPS برچسبگذاری جغرافیایی میشوند. در وقوع جعل GPS، از موقعیت های جعلی GPS در برچسب گذاری جغرافیایی تصاویر پهپاد استفاده می شود. تشخیص جعل پهپاد مبتنی بر دید مبتنی بر مقایسه دو مسیر پرواز است که به طور همزمان برای پهپاد از دو روش موقعیتیابی مختلف تعیین میشوند: مسیر اول از موقعیتهای GPS و مسیر دوم از تصاویر پهپاد با استفاده از VO به دست میآید.
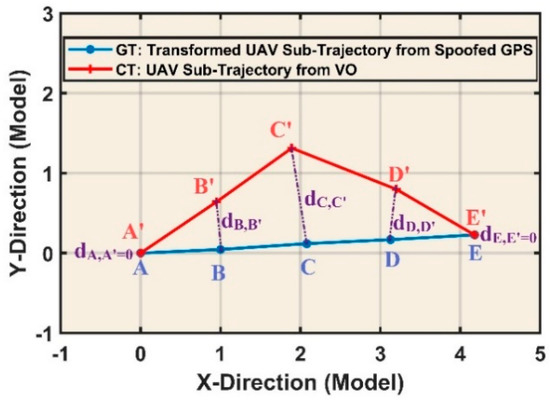
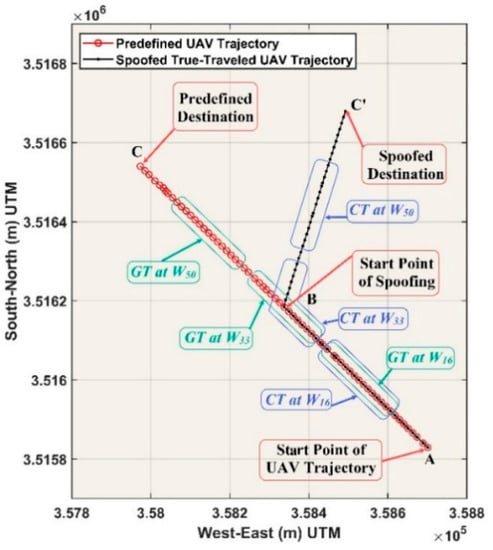
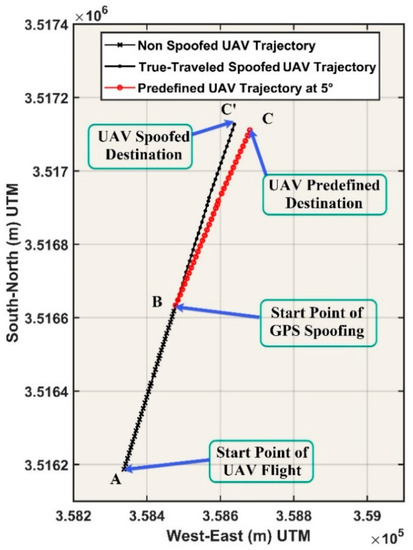
هنگامی که پهپاد جعل می شود، مکان، شکل، طول و سایر ویژگی های مسیر پهپاد استخراج شده از موقعیت های GPS با ویژگی های مسیر پهپاد جعلی واقعی که از تصاویر پهپاد با استفاده از VO به دست می آید، سازگاری ندارد. خط ABC را در شکل 1 فرض کنیدمسیر از پیش تعریف شده پهپاد است و نقاط A و C شروع پرواز و نقاط مقصد از پیش تعریف شده آن است. فرض کنید وقتی پهپاد به نقطه B می رسد، توسط مهاجمان با استفاده از جعل GPS جعل می شود. بنابراین پهپاد از مسیر از پیش تعریف شده خود خارج می شود و به جای خط BC به خط BC’ می رود. همانطور که گفته شد، در مورد جعل GPS در سطح SRB، موقعیتهای جعلی GPS همچنان نشان میدهد که پهپاد از مسیر از پیش تعریفشده خود (یعنی خط BC) پیروی میکند، در حالی که مسیر واقعی پهپاد خط BC است. بنابراین، در شکل 1، خط ABC’ مسیر واقعی پهپاد جعلی است. مقایسه این مسیرها در اینجا برای تشخیص جعل پهپاد استفاده می شود. اگرچه این مقایسه می تواند جعل پهپاد را تشخیص دهد، اما نمی تواند زمان و مکان جعل پهپاد را مشخص کند. برای غلبه بر این نقص، به جای مقایسه کل مسیرهای جعلی از پیش تعریف شده و واقعی پهپاد، از رویکرد مبتنی بر پنجره متحرک برای مقایسه محلی این مسیرها در هر پنجره استفاده می شود. برای این منظور، پنجره ای در امتداد مسیر پهپاد، موقعیت به موقعیت لغزشی می شود و در هر موقعیت تصویربرداری از پهپاد، k تصویر دارای برچسب جغرافیایی انتخاب می شود. در اینجا، k اندازه پنجره های متحرک است. در شکل 1مستطیل های زرد رنگ در قسمت های ابتدایی و میانی مسیرها نمونه هایی از پنجره متحرک هستند. در هر پنجره دو مسیر فرعی از پهپاد قابل استخراج است: اولین مسیر فرعی از موقعیت های GPS (درست یا جعلی) استخراج می شود که در برچسب گذاری جغرافیایی تصاویر پهپاد استفاده می شود. دومین مسیر فرعی از تصاویر پهپاد با استفاده از VO استخراج شده است. اگر جعل پهپاد وجود نداشته باشد، این مسیرهای فرعی مشابه خواهند بود. با مقایسه این مسیرهای فرعی، می توان به طور دقیق زمان و مکان جعل پهپاد را تشخیص داد. این زیرمسیرها را می توان مستقیماً با استفاده از فاصله متریک یا به طور غیرمستقیم با استفاده از یک توصیفگر مسیر مقایسه کرد که مسیر را توسط یک بردار ویژگی که منعکس کننده ویژگی های مختلف مسیر است، توصیف می کند. در ادامه مولفه های این روش مبتنی بر بینایی به طور کامل شرح داده شده است.
2.1. استخراج مسیر با استفاده از VO
مسیر حرکت یک نقطه متحرک (به عنوان مثال، یک پهپاد)، T ، دنباله ای از جفت های مرتب شده است. (تیمن،پمن)(تیمن،پمن)[ 43 ] مانند معادله (1). در این معادله، پمنپمنبردار موقعیت نقطه در زمان t i است و n تعداد موقعیت های T یا طول T است :
در موقعیت i- امین پهپاد و در یک پنجره متحرک W i ، دو مسیر فرعی با طول k ( k اندازه پنجره است) را می توان به پهپاد اختصاص داد. این پنجره در امتداد مسیر پهپاد حرکت می کند و در هر موقعیت i- امین پهپاد، k تصاویر دارای برچسب جغرافیایی از شماره تصویر i – ( k – 1)/2 تا i + ( k – 1)/2 انتخاب می شوند. در داخل W i ، اولین مسیر فرعی از موقعیت های GPS از G i- ( k -1)/2 تا G استخراج می شود.i +( k -1)/2 که در برچسب گذاری جغرافیایی تصاویر پهپاد استفاده می شود (معادله (2)). این زیرمسیر مسیر GPS نامیده می شود و در ادامه با GT i نشان داده می شود . بهعلاوه، دومین مسیر فرعی از موقعیتهای دوربین پهپاد Ci- (k-1)/2 تا Ci +(k – 1 ) / 2 در W i استخراج میشود ، که با استفاده از VO محاسبه میشوند (معادله (4) ). این مسیر فرعی، مسیر دوربین نامیده می شود و در زیر با CT i نشان داده می شود (معادله (3)):
استخراج GT i در هر W i آسان است اما دستیابی به CT i با استفاده از VO به محاسبات بیشتری نیاز دارد. VO فرآیند تخمین ego-motion یک عامل (به عنوان مثال، پهپاد)، با استفاده از ورودی یک یا چند دوربین متصل به آن است [ 44 ]. موقعیت نسبی دوربین در VO را می توان در یک رویکرد مبتنی بر ظاهر یا مبتنی بر ویژگی تخمین زد. در روش مبتنی بر ظاهر، مقادیر شدت، در رویکرد تطبیق الگو، یا مقادیر جریان نوری برای تخمین حالت استفاده میشوند [ 45 ]]. در روشهای مبتنی بر ویژگی، ویژگیهای نقطهای متمایز استخراج و توصیف میشوند و سپس برای تطبیق نقطه و تخمین وضعیت نسبی بین دو تصویر که وابسته به بافت تصویر هستند استفاده میشوند [ 46 ]. همانطور که در روش پیشنهادی، فقط از مسیرهای فرعی نسبی پهپاد استفاده می شود. بنابراین، یک رویکرد مبتنی بر ویژگی های هندسی تک چشمی VO [ 47 ] با یک دوربین کالیبره شده برای محاسبه مسیر پهپاد استفاده شد. علاوه بر این، یک عملگر SIFT (Scale-Invariant Feature Transform) [ 48 ] برای استخراج و توصیف ویژگی نقطه برای مطابقت با نقاط مربوطه و محاسبه پارامترهای جهت گیری نسبی استفاده شد.
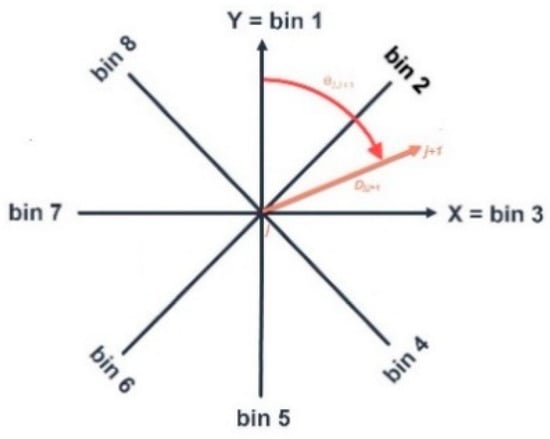
برای محاسبه CT i ، در هر W i ، جهت نسبی، (آرj ، j + 1، بj ، j + 1)(آر�،�+1، ب�،�+1)، پارامترهای بین تصاویر استریو متوالی از منjمن�و منj + 1من�+1نیاز به برآورد اینجا، آرj ، j + 1آر�،�+1ماتریس چرخش نسبی دوربین در موقعیت j + 1 مربوط به دوربین در موقعیت j است و بj ، j + 1ب�،�+1بردار موقعیت نسبی دوربین در موقعیت j + 1 مربوط به دوربین در موقعیت j است، همانطور که در شکل 2 نشان داده شده است. سپس، تمام موقعیت های نسبی دوربین در W i با استفاده از معادله (4) به سیستم مختصات مدل اولین تصاویر استریو تبدیل شده اند [ 36 ، 49 ].
در معادله (4) سیjسی�بردار موقعیت j- امین تصویر در W i است، λj − 2 ، j − 1��-2،�-1ضریب مقیاس تبدیل فاصله از مدل استریو است j − 1�-1به مدل استریو از j − 2�-2، آرj − 2 ، j − 1آر�-2،�-1ماتریس چرخش نسبی دوربین در موقعیت است j − 1�-1در مورد دوربین در موقعیت j − 2�-2، اسp , j − 2اسپ،�-2ضریب مقیاس تبدیل فاصله از مدل استریو است j − 2�-2به اولین مدل استریو از j = p�=پ، و مp , j − 2مپ،�-2ماتریس چرخش نسبی دوربین در موقعیت است j − 2�-2در مورد دوربین اول در موقعیت j = p�=پ.
مهمترین نقص VO به خصوص در VO دوربرد، خطای تجمعی در تخمین موقعیت دوربین است. این باعث انحراف در مسیر تخمینی از مسیر واقعی می شود که نامحدود است. این خطا با افزایش طول مسیر افزایش می یابد. با استفاده از رویکرد مبتنی بر پنجره در استخراج مسیرهای فرعی پهپاد CT is ، خطای رانش VO در این مقاله کنترل شد. علاوه بر این، برای کاهش این خطا، تنظیم باندل پراکنده لغزشی [ 44 ، 50 ]، به عنوان یک تکنیک موثر در کاهش این خطا، اجرا شد.
2.2. تحول مختصات
برای تشخیص جعل پهپاد در پنجره W i ، دو زیرمسیر CT i و GT i باید با هم مقایسه شوند. با این حال، مقایسه مستقیم آنها ممکن نیست. این به دلیل سیستم های مختصات متفاوت این مسیرهای فرعی است. بنابراین، قبل از مقایسه آنها، این زیرمسیرها باید به یک سیستم مختصات تبدیل شوند. GT i معمولاً در یک سیستم مختصات زمینی، مانند WGS84 (سیستم ژئودتیک جهانی 1984) یا UTM (جهانی مرکاتور عرضی) بیان می شود، و همانطور که قبلاً ذکر شد، CT i در سیستم مختصات مدل اولین تصاویر استریو در W i بیان می شود.. این سیستم های مختصات دارای منشاء، مقیاس ها و جهت گیری محورهای متفاوتی هستند. علاوه بر این، از آنجایی که دقت موقعیت یابی ارتفاع توسط GPS کمتر از دقت موقعیت یابی پلانیمتری توسط GPS است، در این مقاله تنها از مسیرهای پلان سنجی استفاده شده است. در W i ، سیستم مختصات GT i با استفاده از یک مدل دوبعدی (2D) منسجم به سیستم مختصات CT i تبدیل میشود (معادله (5)):
جایی که φ�زاویه چرخش است، ρ�عامل مقیاس است و ایکسoایکس�بردار ترجمه سیستم مختصات GT i مربوط به سیستم مختصات CT i است. در این معادله، تیجیjتیجی�بردار موقعیت تبدیل شده است جیjجی�در معادله (2). برای بدست آوردن پارامترهای این مدل (یعنی φ�، ρ�، و ایکسoایکس�مختصات مربوط به اولین و آخرین تصاویر در W i از GPS و VO استفاده شد. پس از تبدیل، GT i تبدیل شده به عنوان TGT i نشان داده می شود ، مانند رابطه (6):
2.3. مقایسه مسیرهای فرعی دوربین و GPS
مقایسه CT i و TGT i در W i می تواند جعل پهپاد را تشخیص دهد. این مقایسه را می توان به طور مستقیم یا غیرمستقیم با استفاده از برخی معیارهای عدم تشابه انجام داد. در این مقاله برای مقایسه مستقیم از مجموع فواصل اقلیدینی بین نقاط متناظر (SEDCP) CT i و TGT i استفاده شده است. علاوه بر این، برای مقایسه غیرمستقیم، فاصله زاویه و فاصله تاکسی بین توصیفگرهای مسیر HOD (هیستوگرام جابجاییهای جهتدار) CT i و TGT i استفاده میشود.
2.3.1. مقایسه مستقیم
مقایسه مستقیم CT i و TGT i در W i می تواند با استفاده از SEDCP، مانند رابطه (7) انجام شود. در این معادله، د( تیجیj،سیj)د(تیجی�،سی�)فاصله اقلیدسی بین است تیجیjتیجی�و سیjسی�:
شکل 3 فواصل اقلیدسی را بین نقاط متناظر CT i و TGT i در یک پنجره پنج نقطه ای W i نشان می دهد. در این شکل نقطه C’ نقطه شروع جعل پهپاد و نقطه تغییر جهت آن به دلیل جعل GPS است که در CT i ثبت شده است .
2.3.2. مقایسه غیر مستقیم
مقایسه غیرمستقیم CT i و TGT i را می توان با استفاده از توصیفگرهای مسیر HOD آنها انجام داد. توصیفگر مسیر HOD در [ 51 ] برای توصیف مسیر مفاصل بدن و تشخیص اعمال انسان از ابر نقطه کینکت معرفی شد. توصیفگر مسیر HOD یک هیستوگرام است که سطل های آن مقدار جابجایی جسم متحرک را در جهات مختلف بین 0 تا 360 درجه ثبت می کند. شماره سطل (BN) HOD وضوح زاویه ای یا فاصله بین (BI) HOD را تعیین می کند (معادله (8)). به عنوان مثال، اگر BN روی هشت تنظیم شود، فاصله بین آن (BI) برابر با 45 درجه خواهد بود و سطل های آن جهات را در زوایای 0 درجه، 45 درجه، … و 315 درجه نشان می دهد ( شکل 4).).
در HOD معمولی، فاصله Dj ، j + 1��،�+1با زاویه آزیموت (زاویه جهت از Dj ، j + 1��،�+1مربوط به محور Y) از θj ، j + 1��،�+1(معادله (9)) برحسب فاصله زاویه ای به نزدیکترین سطل آن نسبت داده می شود و سپس مجموع فواصل اختصاص داده شده به هر سطل محاسبه می شود. در این مقاله، یک HOD اصلاح شده با تقسیم هر فاصله ساخته شد Dj ، j + 1��،�+1بین دو نزدیکترین سطل آن از نظر فاصله زاویه ای نسبی از θj ، j + 1��،�+1با زوایای آن سطل ها. در معادله (9) (ایکسj،yj)(ایکس�،��)مختصات نقطه j است. بخش هر سطل از هر فاصله از Dj ، j + 1��،�+1بر اساس رابطه (10) محاسبه می شود. دو نزدیکترین سطل از Dj ، j + 1��،�+1با استفاده از معادلات (11) و (12) تعیین می شود:
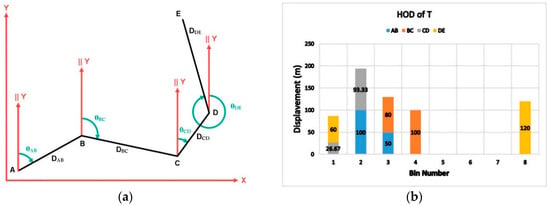
همانطور که در شکل 4 نشان داده شده است، HOD در محاسبه زاویه آزیموت به محور Y از سیستم مختصات وابسته است.θj ، j + 1��،�+1. از این رو، برای مقایسه CT i و GT i با توصیفگرهای HOD آنها، GT i باید به سیستم مختصات CT i تبدیل شود. شکل 5 a و شکل 5 b به ترتیب نمونه ای از یک مسیر کلی T و توصیفگر مسیر HOD آن را نشان می دهد. علاوه بر این، جدول 1 مقادیر را نشان می دهد Dj ، j + 1��،�+1و θj ، j + 1��،�+1، اولین و دومین اعداد نزدیک آنها و قسمت هر طرف T در این سطل ها. علاوه بر این، جدول 2 قسمت هر طرف T را در هر سطل نشان می دهد. آخرین ردیف در جدول 2 توصیفگر مسیر HOD اصلاح شده T است و مجموع بخش اضلاع در هر سطل است.
برای مقایسه غیرمستقیم CT i و TGT i با استفاده از توصیفگرهای مسیر HOD آنها، دو معیار عدم تشابه در اینجا پیشنهاد شده است. اول، فاصله زاویه بین HOD ها (HOD_AD)، و دوم، فاصله تاکسی بین HOD ها (HOD_AD) این زیرمسیرها برای محاسبه تفاوت های آنها استفاده شد (معادلات (13) و (14)). در این معادلات، آآو بب، به ترتیب توصیفگرهای مسیر HOD CT i و TGT i را نشان می دهند ، و آمنآمنو بمنبمنi- امین اجزای هستندآآو بب:
2.4. تشخیص پهپاد مبتنی بر دید
شکل 6 مراحل روش پیشنهادی مبتنی بر دید را برای تشخیص جعل پهپاد نشان می دهد که به طور خلاصه در هفت مرحله در شکل 6 توضیح داده شده است.
- مرحله 1 :
-
در ابتدا، اندازه پنجره متحرک ( k )، آستانه اندازه گیری عدم تشابه استفاده شده ( Th )، و آستانه اعلام جعل پهپاد ( k/2 ) تعیین می شود. معیار آستانه عدم تشابه در تعیین موقعیت های جعلی GPS و آستانه اعلام جعل پهپاد در اعلام جعل پهپاد استفاده می شود. مقادیر آستانه اندازه گیری عدم تشابه SEDCP، HOD_AD و HOD_TD با تجزیه و تحلیل حساسیت به دست می آید که به طور کامل در بخش 3.7 توضیح داده شده است. علاوه بر این، آستانه اعلام جعل پهپاد روی k / 2 تنظیم شده است.
- مرحله 2 :
-
در این مرحله، در هر موقعیت i- امین پهپاد، k تصویر از مسیر پرواز پهپاد، از شماره تصویر i-(k-1)/2 تا i+(k-1)/2 با استفاده از یک پنجره متحرک انتخاب می شود. Wi.
- مرحله 3 :
-
در مرحله 3، با استفاده از تصاویر انتخاب شده و موقعیت های GPS متناظر آنها در پنجره W i ، دو مسیر فرعی CT i و GT i محاسبه می شود.
- مرحله 4 :
-
در این مرحله سیستم مختصات GT i به سیستم مختصات CT i تبدیل می شود .
- مرحله 5 :
-
در اینجا، اندازه گیری عدم تشابه بین CT i و TGT i محاسبه می شود.
- مرحله 6 :
-
در این مرحله، اندازه گیری عدم تشابه محاسبه شده بین CT i و TGT i در پنجره W i با مقدار آستانه، Th مقایسه می شود. اگر مقدار اندازه گیری عدم تشابه از Th بیشتر شود، موقعیت GPS در نقطه i ، به عنوان موقعیت جعلی تشخیص داده می شود.
- مرحله 7 :
-
در نهایت بر اساس نتایج مرحله قبل تصمیم به اعلام جعل پهپاد بر اساس آستانه داده شده گرفته می شود.
3. آزمایش ها و نتایج
3.1. داده ها
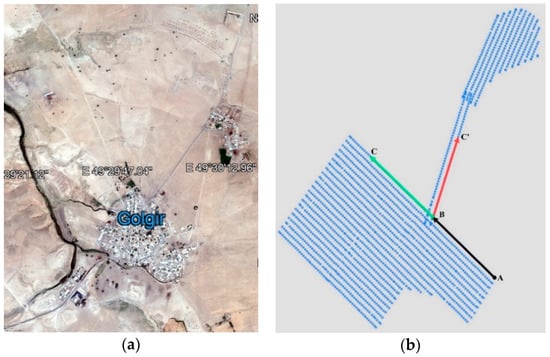
برای ارزیابی رویکرد مبتنی بر بینایی پیشنهادی برای تشخیص جعل پهپاد، 97 تصویر از پروژه فتوگرامتری پهپاد از روستای گلگیر شهرستان مسجدسلیمان در جنوب غربی ایران استفاده شد. شکل 7 نمای Google Earth از روستای گلگیر و خطوط پروازی این پروژه فتوگرامتری پهپاد را نشان می دهد که در اجرای سناریوهای مختلف رویکرد پیشنهادی استفاده می شود.
در این پروژه از دوربین دیجیتال DJI-FC6520 با فاصله کانونی 12 میلی متر و اندازه تصویر 5280 در 3956 پیکسل و GSD (فاصله نمونه زمینی) 0.03 متر استفاده شده است. مساحت همپوشانی بین تصاویر متوالی حدود 80 درصد و ارتفاع تصویربرداری بالای سطح زمین حدود 110 متر است. طول مسیر از تصاویر استفاده شده حدود 2300 متر است. تمام تصاویر با استفاده از موقعیت های GPS در طول پرواز با دقت 1.5 ± متر برچسب گذاری شدند. شکل 8 دو تصویر استریو متوالی از مجموعه داده را نشان می دهد.
3.2. شبیه سازی جعل جی پی اس
در بخش 1 ، برخی از مطالعات در مورد جعل موفق پهپادهای غیرنظامی با استفاده از جعل GPS مورد بررسی قرار گرفته است [ 10 , 11 , 12 , 13 , 14]. در این مقاله با توجه به محدودیت های موجود در اجرای جعل GPS، وقوع جعل GPS در سطح جعل SRB شبیه سازی شد. جعل پهپاد به دلیل جعل GPS در سطح جعل SRB به این معنی است که کلاهبردار مکان، مقصد، سرعت و مسیر از پیش تعریف شده پهپاد را می داند. بنابراین، کلاهبردار میتواند سیگنالهای جعلی جیپیاس را تولید و منتشر کند، به طوری که موقعیتهای جعلی جیپیاس که از سیگنالهای جعلی ایجاد میشوند، با مسیر از پیش تعریفشده پهپاد منطبق شوند، در حالی که پهپاد به مسیر جعلی دیگری هدایت میشود. سطح جعل SRB دشوارترین حالت جعل GPS برای شناسایی و کاهش آن است. علاوه بر این، فرض بر این است که اسپوفر سیگنالهای جعلی GPS را تولید میکند تا سرعت پهپاد تغییر قابل توجهی نداشته باشد. در نتیجه، مسافت طی شده توسط پهپاد در زمان جعل برابر با مسافت طی شده آن در صورت عدم وجود جعل GPS خواهد بود. این امر تشخیص جعل پهپاد با استفاده از مقایسه سرعت پهپاد و مسافت طی شده آن از GPS جعلی و سنسورهای دیگر مانند دوربین را تقریبا غیرممکن می کند.
در این تحقیق، موقعیتهای پهپاد جعلی شبیهسازی شده از موقعیتهای GPS موجود تصاویر پهپاد دارای برچسب جغرافیایی در خطوط پروازی پروژه فتوگرامتری پهپاد گلگیر انتخاب شدهاند ( شکل 7 ب). علاوه بر این، مطابق با این موقعیتهای جعلی GPS (یعنی خط پرواز از پیش تعریف شده)، خط پرواز دیگری از پروژه فتوگرامتری پهپاد گلگیر به عنوان مسیر واقعی پهپاد جعلی در نظر گرفته میشود.
3.3. تشخیص جعل پهپاد: اولین سناریو
شکل 9 به صورت شماتیک اولین سناریوی جعل پهپاد را نشان می دهد. تصاویر و موقعیت های GPS در مسیرهای از پیش تعریف شده و در مسیرهای جعلی پهپاد واقعی از خطوط پروازی پروژه فتوگرامتری پهپاد گلگیر انتخاب شده اند (یعنی خطوط ABC و ABC در شکل 7 ب). از آنجایی که اینها از همان پروژه فتوگرامتری پهپاد انتخاب شده اند، تفاوت قابل توجهی در سرعت پهپاد در این خطوط پرواز وجود ندارد.
در این سناریو، نقطه A به عنوان نقطه شروع مسیر پهپاد و نقطه B به عنوان نقطه شروع جعل پهپاد در نظر گرفته شد که در موقعیت تصویربرداری شماره 33 اعمال شد ( شکل 9 ). مقصد از پیش تعریف شده پهپاد نقطه C بود. با این حال، هنگامی که جعل اعمال شد، پهپاد به نقطه C هدایت می شود. خط BC در شکل 9 از موقعیت های جعلی GPS ساخته شد و خط ABC (در نشانگرهای دایره قرمز) به عنوان مسیر از پیش تعریف شده پهپاد در نظر گرفته شد. علاوه بر این، خط ABC در شکل 9(در نشانگرهای نقطه سیاه) به عنوان مسیر واقعی پهپاد جعلی در نظر گرفته شد که شامل تصاویر پهپاد است. فرض بر این بود که هیچ جعل در بخش AB رخ نداده است. بنابراین، مسیر از پیش تعریف شده پهپاد و مسیر پهپاد جعلی واقعی در این بخش با یکدیگر منطبق شدند. در هر پنجره Wi ، موقعیتهای GPS تصاویر پهپاد دارای برچسب جغرافیایی برای ساخت GT i و تصاویر پهپاد مربوطه برای ساخت CT i استفاده شد.. هنگامی که جعل در نقطه B رخ می دهد، اندازه گیری GPS در طول پرواز پهپاد بر روی خط BC باید خط BC (یعنی خط پرواز از پیش تعریف شده) را نشان دهد. از این رو، موقعیتهای GPS در خط BC به عنوان موقعیتهای جعلی GPS در نظر گرفته شد که با تصاویر پهپاد در خط BC مطابقت دارد. خط BC’ مسیر واقعی پهپاد جعلی است. موقعیت های GPS خط BC در ساخت GTi و تصاویر پهپاد خط BC در ساخت CTi های مربوطه با استفاده از VO استفاده می شود.
نتایج سناریوی اول
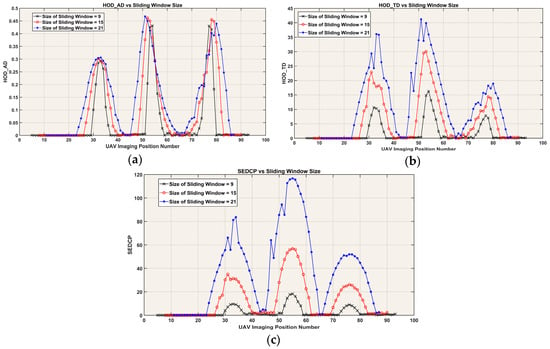
در این سناریو، برای تشخیص جعل پهپاد، اندازه پنجره متحرک W i به 9، 15 و 21 تنظیم شد . شکل 10 مقادیر سه معیار عدم تشابه مورد استفاده برای تشخیص جعل پهپاد را در هر پنجره W i نشان می دهد.
در شکل 10 ، محور افقی تعداد موقعیت تصویربرداری پهپاد در مسیر پرواز آن است و محور عمودی مقادیر اندازه گیری عدم تشابه را نشان می دهد. در شکل 10 a، زمانی که موقعیت های تصویربرداری از VO با موقعیت های GPS در پنجره متحرک همزمان باشد، HOD_AD نزدیک به صفر است. در این سناریو، این وضعیت تا موقعیت تصویربرداری پهپاد شماره 26 برای اندازه پنجره 15 رخ می دهد. تا این موقعیت، پنجره متحرک دارای موقعیت GPS جعلی از خط BC نیست. در این منطقه تفاوت معنی داری بین CT i و TGT i وجود ندارد. با این حال، با رسیدن به پنجره به موقعیت شماره 27، و با وارد کردن اولین موقعیت جعلی GPS (یعنی موقعیت شماره 34) در پنجره، مقدار اندازه گیری عدم تشابه HOD_AD شروع به افزایش می کند ( شکل 10 a). حداکثر مقدار اندازه گیری عدم تشابه HOD_AD در موقعیت تصویربرداری شماره 33، که نقطه شروع جعل پهپاد است، رخ داده است. همانطور که در شکل 9 نشان داده شده است، حداکثر اختلاف بین CT i و TGT i در این نقطه در پنجره W 33 رخ داده است.. پس از عبور از موقعیت شماره 41، تمام موقعیت های تصویربرداری در مسیر پهپاد جعلی واقعی و تمام موقعیت های جعلی GPS در مسیر از پیش تعریف شده پهپاد در یک جهت مستقیم در داخل پنجره های متحرک قرار می گیرند (به عنوان مثال، CT 50 و GT 50 در W 50 در شکل 9 ). بنابراین، HOD_AD دوباره به صفر نزدیک می شود، زیرا، در این موقعیت ها، TGT i با CT i منطبق است. این الگو را می توان در اندازه های پنجره 9 و 21 مشاهده کرد، همانطور که در شکل 10 a نشان داده شده است. علاوه بر این، نتایج این سناریو از معیارهای عدم تشابه HOD_TD و SEDCP در شکل 10 ب ارائه شده است وشکل 10 ج به ترتیب. نتایج نشان می دهد که همه HOD_AD، HOD_TD و SEDCP حساسیت خوبی نسبت به تغییر فوری جهت پهپاد به دلیل جعل دارند. علاوه بر این، مقادیر HOD_TD و SEDCP به طور قابل توجهی با افزایش اندازه پنجره از 9 به 15 و 21 افزایش می یابد.
همانطور که قبلا ذکر شد، نقطه B یا شماره موقعیت 33 نقطه شروع جعل پهپاد و نقطه C’ مقصد جعلی پهپاد در موقعیت شماره 66 است ( شکل 9 ). در این راستا 33 موقعیت جعلی GPS در جریان جعل پهپاد رخ داده است. برای تشخیص وقوع جعل، مقادیر آستانه HOD_AD، HOD_TD و SEDCP به ترتیب روی 0.002، 0.13 و 0.31 تنظیم شده است. روند تعیین این آستانه ها در بخش 3.7 توضیح داده شده است . تعداد موقعیتهای GPS جعلی شناساییشده با روش پیشنهادی با استفاده از این معیارهای عدم تشابه در سه اندازه از پنجره متحرک در جدول 3 آورده شده است.
نتایج بهدستآمده نشان میدهد که تمام معیارهای عدم تشابه، جعل پهپاد را در ابتدای آن تشخیص میدهند، بهویژه در مورد استفاده از پنجرهای با اندازه 9. بنابراین، روش پیشنهادی از طریق این معیارهای عدم تشابه میتواند به درستی مکان و زمان جعل پهپاد را تشخیص دهد.
به طور کلی، با افزایش اندازه پنجره، تعداد موقعیت GPS جعلی شناسایی شده با روش پیشنهادی افزایش می یابد. علاوه بر این، حساسیت SEDCP به جعل پهپاد تا مقصد جعلی (یعنی شماره موقعیت 66) را می توان در شکل 10 مشاهده کرد.ج در مقایسه با HOD_AD و HOD_TD، اندازهگیری عدم تشابه SEDCP میتواند با موفقیت تمام موقعیتهای جعلی GPS را حتی پس از اعداد موقعیت 37، 40 و 43 در تمام اندازههای پنجره متحرک شناسایی کند. پس از این موقعیت ها، تمام موقعیت های تصویربرداری در مسیر واقعی پهپاد جعلی و تمام موقعیت های جعلی GPS در مسیر از پیش تعریف شده پهپاد در یک جهت مستقیم در پنجره متحرک قرار دارند. با نگاهی دقیق به موقعیتهای GPS و دوربین در خطوط BC و BC مشخص میشود که تفاوت کمی در سرعت پهپاد بین این خطوط وجود دارد زیرا تصاویر و موقعیتهای GPS از دو خط پروازی مختلف پروژه فتوگرامتری پهپاد گلگیر انتخاب شدهاند. این نشان می دهد که SEDCP به تغییرات جزئی در سرعت پهپاد به دلیل جعل GPS حساس تر است. بنابراین، برای نظارت بر جعل پهپاد،
3.4. تشخیص جعل پهپاد: سناریوی دوم
شکل 11نشان می دهد که سناریوی دوم جعل پهپاد با هدف ارزیابی اثرات نقاط تغییر مسیر می باشد. در این راستا خط ABCDE به عنوان مسیر از پیش تعریف شده پهپاد در نظر گرفته می شود که در آن نقاط C و D نقاط تغییر مسیر پهپاد هستند. علاوه بر این، خط ABC به عنوان مسیر واقعی پهپاد جعلی در نظر گرفته می شود. نقطه A نقطه شروع پرواز پهپاد و نقطه B نقطه شروع جعل پهپاد در موقعیت تصویربرداری شماره 33 است. مقصد از پیش تعریف شده پهپاد نقطه E است. با این حال، پهپاد جعلی به نقطه C در موقعیت تصویربرداری شماره 97 هدایت می شود. مشابه سناریوی اول، در این سناریو، تصاویر پهپاد در مسیر پهپاد جعلی واقعی و موقعیت های GPS جعلی در مسیر از پیش تعریف شده پهپاد مشاهده می شود. از خطوط پروازی پروژه فتوگرامتری پهپاد گلگیر انتخاب شده اند.
مشابه سناریوی اول، اندازه پنجره متحرک بر روی 9، 15 و 21 تنظیم شد . شکل 12 مقادیر اندازه گیری عدم تشابه را نشان می دهد. با در نظر گرفتن این شکل، اولین مقدار حداکثر اندازه گیری های عدم تشابه در نقطه شروع جعل پهپاد، در موقعیت شماره 33 (یعنی نقطه B در شکل 11 ) به دست آمد. علاوه بر این، دو مقدار حداکثر اضافی در نقاط تغییر مسیر پهپاد در موقعیت شماره های 55 و 76، در نقاط C و D به دست آمد. این شرط برای تمام معیارهای عدم تشابه و اندازه پنجره صادق بود. دلیل ظاهر این مقادیر حداکثر در نقاط تغییر مسیر، تفاوتی است که بین شکل CT i و GT i وجود دارد.در این نقاط بنابراین، روش پیشنهادی به وجود هر نقطه تغییر مسیر حساس است. به طور خاص، عملکرد SEDCP و HOD_TD در تشخیص جعل پهپاد در این نقاط تغییر مسیر بهتر از عملکرد HOD_AD بود. علاوه بر این، SEDCP نتایج برتری را نشان می دهد، زیرا می تواند به طور موثر بین حالت های عادی و جعلی پهپاد تمایز قائل شود. به طور کلی، مقادیر SEDCP بزرگتر از مقادیر HOD_TD هستند و SEDCP در مقایسه با HOD_TD یک معیار عدم تشابه مناسب است. تاثیر اندازه پنجره در تشخیص جعل پهپاد و در ابتدای جعل پهپاد مهم است. به عبارت دیگر، با کوچکتر شدن اندازه پنجره، حساس تر می شود و می تواند جعل پهپاد را زودتر، یعنی در ابتدا تشخیص دهد. علاوه بر این، نتایج بهدستآمده نشان میدهد که زمان نظارت بر جعل پهپاد به اندازه پنجره بستگی دارد. هنگامی که اندازه پنجره افزایش می یابد، موقعیت های جعلی GPS برای مدت طولانی در داخل پنجره باقی می مانند. به عبارت دیگر، زمان پاسخ به وقوع جعل در اندازه بزرگتر پنجره (مثلاً 21) بیشتر از زمان پاسخ در اندازه پنجره کوچکتر (مثلاً 9) است.جدول 4 تعداد موقعیت های GPS جعلی شناسایی شده را با استفاده از معیارهای عدم تشابه پیشنهادی در سه اندازه از پنجره متحرک نشان می دهد. در این سناریو، SEDCP با موفقیت وقوع جعل پهپاد را در پنجره های 15 و 21 از نقطه شروع جعل تا انتهای آن شناسایی کرد.
3.5. تشخیص جعل پهپاد: سناریوی سوم
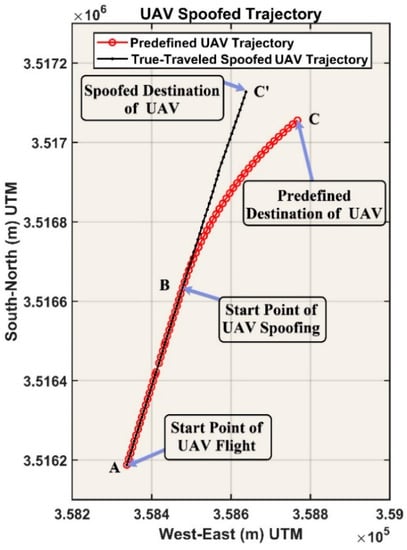
در این سناریو، خط پروازی پروژه فتوگرامتری پهپاد گلگیر به عنوان مسیر پهپاد جعلی واقعی انتخاب شد. مطابق با این مسیر، یک مسیر از پیش تعریف شده پهپاد به جای خط مستقیم به صورت منحنی طراحی شد. این منحنی حالتی را نشان می دهد که در آن جهت پهپاد در مسیر از پیش تعریف شده پهپاد به صورت تدریجی با نرخ 1 درجه از یک موقعیت تصویربرداری به موقعیت بعدی تغییر می کند. شکل 13 این سناریو را نشان می دهد. نقطه A نقطه شروع مسیر پهپاد و نقطه B نقطه شروع جعل پهپاد بود که در موقعیت شماره 31 اعمال شد. همچنین نقطه C’ در موقعیت شماره 64 به عنوان مقصد جعلی پهپاد در نظر گرفته شد. ( شکل 13). در این راستا 32 موقعیت جعلی GPS در جریان جعل پهپاد رخ داد. نتایج این سناریو در اندازه پنجره 9، 15 و 21 در شکل 14 ارائه شده است. جدول 5 تعداد موقعیتهای جعلی GPS را در این سناریو نشان میدهد که با معیارهای عدم تشابه پیشنهادی در اندازههای مختلف پنجره شناسایی شدهاند.
همانطور که در شکل 14 نشان داده شده است ، تمام معیارهای عدم تشابه استفاده شده دارای مقادیر کوچکی در اندازه پنجره کوچک هستند، به طوری که تشخیص جعل پهپاد در مقایسه با اندازه پنجره بزرگ قابل اعتماد نیست. علاوه بر این، در این سناریو، پس از شروع جعل پهپاد، مقادیر اندازهگیریهای عدم تشابه به صورت تدریجی افزایش مییابد. این نتیجه نشان می دهد که جعل پهپاد می تواند برای مدت طولانی در طول جعل افزایشی پهپاد نظارت شود. با این حال، مقادیر SEDCP و HOD_TD در اندازه پنجره بزرگ مقدار قابل قبولی برای تشخیص جعل پهپاد دارد.
3.6. تشخیص جعل پهپاد: سناریوی چهارم
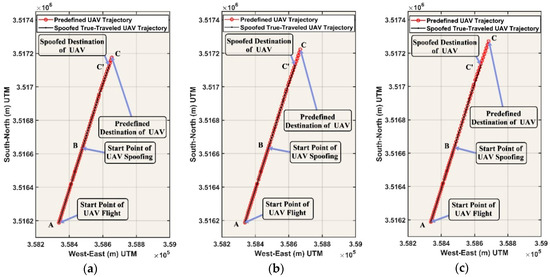
این سناریو برای نشان دادن کارایی روش پیشنهادی در تشخیص جعل پهپاد طراحی شده است که در آن فقط سرعت پهپاد به دلیل جعل GPS تغییر کرده و تغییری در جهت پرواز وجود ندارد. در این سناریو خط پروازی پروژه فتوگرامتری پهپاد گلگیر که در سناریوی سوم مورد استفاده قرار گرفت، به عنوان مسیر پهپاد جعل شده واقعی انتخاب شد. علاوه بر این، فرض بر این بود که جعل پهپاد پس از تصویربرداری موقعیت شماره 31 رخ داده است. مربوط به این مسیر، سه مسیر از پیش تعریف شده پهپاد طراحی شد. در آنها، سرعت پهپاد پس از نقطه جعل 1.1، 1.2، و 1.3 برابر سرعت واقعی پهپاد جعلی بود. این مسیرها در شکل 15 نشان داده شده است. در این شکل نقطه A نقطه شروع مسیر پهپاد و نقطه B نقطه شروع جعل پهپاد است. علاوه بر این، نقاط C و C در موقعیت شماره 64 به ترتیب به عنوان مقصدهای از پیش تعریف شده و جعلی پهپاد در نظر گرفته می شوند. در این راستا، 32 موقعیت جعلی GPS در هنگام جعل پهپاد رخ داد. نتایج این سناریو در اندازه پنجره 9 و سه سرعت مختلف پهپاد جعلی در شکل 16 ارائه شده است. همانطور که در نشان داده شده است شکل 16 نشان داده شده استمعیارهای عدم تشابه HOD_AD و HOD_TD مقادیری کوچکتر از آستانه خود داشتند، زیرا آنها حساس ترین نسبت به تغییر جهت در مسیر پهپاد جعلی هستند. همانطور که در این سناریو، هیچ نقطه تغییر مسیر در مسیر پهپاد جعلی وجود نداشت. مقادیر این معیارهای عدم تشابه نزدیک به صفر بود و نتایج یکسان برای تمام سرعت های پهپاد جعلی به دست آمد. در مقابل، اندازهگیری عدم تشابه SEDCP قادر به تشخیص جعل پهپاد و تمایز بین سرعتهای مختلف پهپاد جعلی بود. جدول 6 تعداد موقعیت های جعلی GPS را در این سناریو نشان می دهد که با اقدامات پیشنهادی عدم تشابه شناسایی شده اند. در شکل 16 نشان داده شده استa,b که معیارهای عدم تشابه HOD_AD و HOD_TD نمی توانند موقعیت های GPS جعلی را شناسایی کنند، در حالی که SEDCP با موفقیت بیش از شش موقعیت جعلی GPS را شناسایی می کند ( شکل 16 ج).
3.7. تجزیه و تحلیل میزان حساسیت
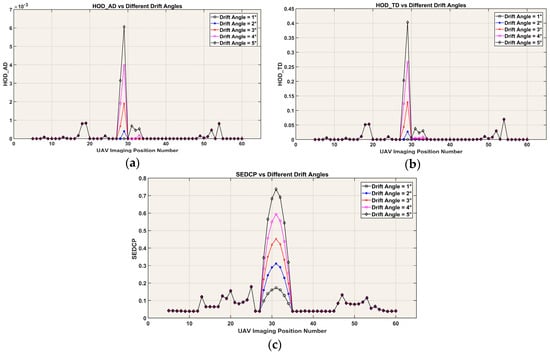
برای تحلیل حساسیت روش پیشنهادی نسبت به تغییرات جهت پهپاد، ابتدا یکی از خطوط پروازی پروژه فتوگرامتری پهپاد گلگیر به عنوان مسیر پهپاد جعلی واقعی (خط با نشانگرهای سیاه در شکل 17 ) انتخاب شد. نقطه A نقطه شروع مسیر پرواز پهپاد و نقطه B نقطه شروع جعل پهپاد در این سناریو است که در موقعیت شماره 31 اعمال شد. همچنین نقطه C به عنوان مقصد جعلی پهپاد در نظر گرفته شد. سپس خط BC’ در برخی زوایا رانش شد و خط رانش شده به عنوان مسیرهای از پیش تعریف شده پهپاد در نظر گرفته شد. برای این منظور، خط BC’ در 1 درجه، 2 درجه، 3 درجه، 4 درجه و 5 درجه رانش شد. برای وضوح، فقط خط رانش شده در 5 درجه در شکل 17 نشان داده شده است. موقعیتهای جعلی GPS بر روی این مسیرهای از پیش تعریفشده پهپاد با توجه به سرعت پهپاد و دوربین نرخ تصویربرداری شبیهسازی شدهاند. برای تعیین مقادیر آستانه بهینه معیارهای عدم تشابه، تجزیه و تحلیل حساسیت در اندازه پنجره 9 انجام شد تا حداقل پاسخ اقدامات عدم تشابه به تغییرات جهت پهپاد ناشی از جعل به دست آید. نتایج این تحلیل حساسیت در شکل 18 ارائه شده است.
همانطور که در شکل 18 مشاهده می شود ، تقریباً در موقعیت شماره 31 حداکثر مقدار وجود داشت که موقعیت شروع جعل پهپاد بود. در رابطه با شکل 18 a،b، HOD_AD و HOD_TD به تغییر جهت پهپاد در زمانی که پهپاد بزرگتر از 2 درجه منحرف شده باشد حساس بودند. علاوه بر این، SEDCP می تواند انحرافات بزرگتر از 1 درجه را تشخیص دهد. در این راستا، حداکثر مقادیر HOD_AD و HOD_TD در 3 درجه و حداکثر مقدار SEDCP در 2 درجه به عنوان آستانه قابل اعتماد برای اعلام جعل در هر پنجره انتخاب شدند. بنابراین، مقادیر آستانه HOD_AD، HOD_TD و SEDCP به ترتیب 0.002، 0.13 و 0.31 تعیین شد. این آستانه ها برای نتایج سناریوهای جدول 3 , جدول 4 , جدول 5 اعمال شد.و جدول 6 برای نشان دادن قابلیت روش پیشنهادی در تشخیص جعل پهپاد.
4. نتیجه گیری
این مقاله یک روش تشخیص جعل پهپاد مبتنی بر دید را معرفی کرد. از این روش می توان در تشخیص جعل پهپادهای غیرنظامی که با استفاده از جعل GPS در سطح جعل SRB جعل می شوند، استفاده کرد. روش پیشنهادی بر اساس تعیین مسیر فرعی CT i با استفاده از VO و GT i بودمسیرهای فرعی از موقعیت های GPS در یک پنجره متحرک. سه معیار عدم تشابه، از جمله HOD_AD، HOD_TD، و SEDCP، برای مقایسه این زیرمسیرها معرفی شدند. برای ارزیابی روش پیشنهادی، چهار سناریو با استفاده از تصاویر واقعی و موقعیت GPS خطوط پروازی پروژه فتوگرامتری پهپاد گلگیر طراحی شد. علاوه بر این، بر اساس نرخ تغییرات در جهت پهپاد به دلیل جعل GPS، یک تحلیل حساسیت در اندازه پنجره 9 برای تعیین آستانه مناسب برای هر اندازه گیری عدم تشابه انجام شد.
نتایج تجربی سناریوی اول نشان داد که زمان و مکان وقوع جعل پهپاد را می توان با استفاده از رویکرد پنجره متحرک با تاخیر زمانی در حدود نیمی از اندازه پنجره تشخیص داد. در نتیجه، جعل پهپاد با روش مبتنی بر بینایی پیشنهادی با موفقیت شناسایی شد. علاوه بر این، با افزایش اندازه پنجره، زمان نظارت بر جعل پهپاد و تعداد موقعیتهای جعلی GPS که با روش پیشنهادی شناسایی شدند، افزایش یافت. در این آزمایش، SEDCP عملکرد بهتری نسبت به HOD_AD و HOD_TD نشان داد و به تغییرات جزئی در سرعت پهپاد به دلیل جعل GPS حساس بود.
در سناریوی دوم، که شامل سه نقطه تغییر مسیر است، اقدامات عدم تشابه پیشنهادی میتواند جعل پهپاد را در این نقاط شناسایی کند. نتایج سناریوی دوم نشان داد که روش پیشنهادی نسبت به وجود نقاط تغییر جهت در مسیرهای از پیش تعریف شده یا در مسیرهای پهپاد جعلی شده واقعی حساس است. به طور خاص، عملکرد SEDCP و HOD_TD در تشخیص جعل پهپاد در نقاط تغییر مسیر بهتر از HOD_AD بود. هنگامی که طول یک خط مستقیم در مسیر از پیش تعریف شده پهپاد و خط مستقیم متناظر آن در مسیر پهپاد جعلی واقعی به طور قابل توجهی بزرگتر از اندازه پنجره شد، موقعیت های جعلی GPS شناسایی نشد و زمان نظارت کاهش یافت.
در سناریوی سوم، که در آن جهت پهپاد به صورت تدریجی با نرخ 1 درجه از یک موقعیت تصویربرداری به موقعیت بعدی تغییر میکند، نتایج بهدستآمده از سه اقدام پیشنهادی عدم تشابه میتواند جعل پهپاد را تشخیص دهد. به طور خاص، در طول وقوع جعل پهپاد، مقادیر این معیارهای عدم تشابه به طور مداوم افزایش مییابد، به ویژه در اندازههای پنجره بزرگ. از این رو، جعل پهپاد را می توان با استفاده از روش پیشنهادی برای مدت طولانی حتی در تغییر جهت تدریجی پهپاد با نرخ بزرگتر از 1 درجه، پایش کرد.
در سناریوی چهارم، توانایی روش پیشنهادی و اقدامات عدم تشابه در برابر تغییر سرعت پهپاد جعلی به دلیل جعل SRB GPS مورد بررسی قرار گرفت. نتایج بهدستآمده در اندازه پنجره 9 نشان داد که HOD_AD و HOD_TD نمیتوانند جعل پهپاد را تشخیص دهند، زیرا نتایج بهدستآمده برای تمام سرعتهای پهپاد جعلی نزدیک به صفر بود. با این حال، SEDCP به تغییرات سرعت در این سناریو حساس بود و میتوانست به طور موثر جعل پهپاد را تشخیص دهد و بین سرعتهای مختلف پهپاد جعلی تمایز قائل شود.
در نتیجه، نتایج بهدستآمده از این سناریوها نشان میدهد که روش پیشنهادی در تشخیص جعل پهپاد ناشی از جعل SRB GPS مؤثر و کارآمد است. از آنجایی که روش پیشنهادی مبتنی بر روش پنجره متحرک است، میتواند زمان و مکان وقوع جعل پهپاد را تعیین کند. این روش زمانی می تواند جعل پهپاد را تشخیص دهد که سرعت واقعی پهپاد جعلی تقریباً برابر با سرعت از پیش تعریف شده پهپاد باشد. نتایج نشان داد که این روش می تواند با تغییرات کمتر از 3 درجه در جهت پهپاد و حتی در صورت تغییرات تدریجی و جزئی جهت پهپاد، جعل پهپاد را تشخیص دهد. نتایج نشان داد که SEDCP به دلیل حساسیت بیشتر آن به تغییرات در تغییر جهت پهپاد ناشی از جعل GPS، معیار عدم تشابه ارزشمندتری است. علاوه بر این،
با این حال، این روش ممکن است در برخی شرایط ناموفق باشد، به عنوان مثال، در شب یا در مناطق با بافت ضعیف، مانند مناطق پوشیده از آب یا برف. علاوه بر این، کارایی VO در تعیین مسیر پهپاد جعلی ممکن است به دلیل تغییرات سرعت پهپاد جعلی تحت تأثیر قرار گیرد، که ممکن است باعث کاهش همپوشانی تصاویر پهپاد شود.












بدون دیدگاه