

خلاصه
بناهای تاریخی به دلیل ارزش معماری، فرهنگی و تاریخی که دارند، موضوع نگهداری و حفاظت از آثار باغی هستند. قبل از چنین عملیاتی، موجودی شی انجام می شود. یکی از ابزارهایی که می توان برای چنین اهدافی استفاده کرد، تشخیص نور و محدوده (LiDAR) است. این فناوری اطلاعاتی در مورد موقعیت، انعکاس و مقادیر شدت نقاط منفرد ارائه می دهد. بنابراین، امکان ایجاد یک تجسم واقعی از کل شیء اسکن شده را فراهم می کند. با توجه به اینکه LiDAR به فرد اجازه می دهد بدون نیاز به نور خارجی یا نور روز، اطلاعات ساختار یک شی را “دیده” و استخراج کند، می تواند ابزاری مطمئن و بسیار مناسب برای تجزیه و تحلیل داده ها برای بهبود ایمنی و جلوگیری از بلایا باشد. هدف اصلی این مقاله ارائه رویکردی برای تشخیص خودکار عیب دیوار در سایتهای بدون نور با استفاده از روش مجموعه داده بهینه (OptD) اصلاح شده است. در این مطالعه، نتایج اندازهگیریهای اسکن لیزری زمینی (TLS) انجام شده در دو ساختمان تاریخی در اتاقهایی بدون نور روز ارائه میشود. یک مکان در زیرزمین خرابه های یک برج قرون وسطایی واقع در Dobre Miasto، لهستان، و دوم در زیرزمین یک ساختمان قرن قدمت واقع در دانشگاه Warmia و Mazury در Olsztyn، لهستان بود. اندازه گیری ها با استفاده از اسکنر لایکا C-10 انجام شد. مجموعه داده به دست آمده x، y، z و شدت با روش OptD پردازش شد. OptD به گونه ای عمل می کند که در ناحیه مورد نظر که در آن سطوح ناقص هستند (مثلاً به دلیل ترک ها و حفره ها)، نقاط بیشتری حفظ می شود. در حالی که در سطوح همگن (مناطق کم علاقه)، نقاط بیشتری حذف می شوند (اطلاعات اضافی). الگوریتم OptD علاوه بر این با معرفی گزینه هایی برای تشخیص و تقسیم عیوب در مقیاس 0 تا 3 (0-بی ضرر، 1-به موجودی، 2-نیاز به تعمیر، 3-خطرناک) اصلاح شد. نتایج بررسی بهدستآمده اثربخشی بالای روش OptD اصلاحشده را در تشخیص و تقسیمبندی عیوب دیوار ثابت کرد. مقادیر مساحت تغییرات محاسبه شد. اطلاعات به دست آمده در مورد اندازه تغییر می تواند برای برآورد هزینه های تعمیر، نوسازی و بازسازی استفاده شود. 1-به موجودی، 2-نیاز به تعمیر، 3-خطرناک). نتایج بررسی بهدستآمده اثربخشی بالای روش OptD اصلاحشده را در تشخیص و تقسیمبندی عیوب دیوار ثابت کرد. مقادیر مساحت تغییرات محاسبه شد. اطلاعات به دست آمده در مورد اندازه تغییر می تواند برای برآورد هزینه های تعمیر، نوسازی و بازسازی استفاده شود. 1-به موجودی، 2-نیاز به تعمیر، 3-خطرناک). نتایج بررسی بهدستآمده اثربخشی بالای روش OptD اصلاحشده را در تشخیص و تقسیمبندی عیوب دیوار ثابت کرد. مقادیر مساحت تغییرات محاسبه شد. اطلاعات به دست آمده در مورد اندازه تغییر می تواند برای برآورد هزینه های تعمیر، نوسازی و بازسازی استفاده شود.
کلید واژه ها:
ابر نقطه ; کاهش ; تقسیم بندی تهدیدات ؛ روش OptD ؛ تشخیص عیب
1. معرفی
احیای ساختمانهای تحت حفاظت حفاظت، زمینهای مورد علاقه بسیاری از سرمایهگذاران است. بنابراین، نیاز به بازرسی کامل، سریع و دقیق اشیا در هنگام گرفتن موجودی آنها وجود دارد. نتایج به دست آمده از بازرسی، عناصر ضروری در فرآیند طراحی و اخذ تصمیم از دفاتر حفاظت می باشد. به منظور انجام اندازه گیری ها و تحقیقات، می توان از اسکن لیزری سه بعدی استفاده کرد [ 1] که روشی فعال است که برای بررسی سازه ها، محوطه ها و غیره به خوبی کار می کند. استفاده گسترده از این فناوری برای حفظ آثار تاریخی، موجودی معماری یا تحقیقات باستان شناسی به فرد امکان می دهد اندازه گیری ها و اطلاعات بسیار دقیقی در مورد شی به دست آورد. همچنین تأثیر بسزایی در زمان و تلاش مورد نیاز برای انجام این فعالیت ها در این زمینه دارد.
روشهای سنتی که هنگام فهرستبندی ساختمانهای تاریخی مورد استفاده قرار میگیرند (مثلاً نقشهبرداری دستی و/یا ارزیابی بصری شی توسط یک متخصص) معمولاً بسیار وقتگیر و وقتگیر هستند. بنابراین، فناوری اسکن لیزری زمینی (TLS) و روشهای پردازش تصویر جایگزینهای بهتری هستند. آنها اطلاعاتی را در مورد یک شی / تسهیلات به طور عینی و سریع به دست می آورند. دادههای بهدستآمده امکان تشخیص عیوب و تکامل آنها [ 2 ]، شناسایی تغییر شکلها و تغییرات در مواد [ 3 ، 4 ] را میدهد. علاوه بر این، ابرهای نقطه ای ارائه شده از طریق فناوری اسکن لیزری می توانند به عنوان پایه ای برای تولید یک مدل سه بعدی کامل از شی مورد کاوش استفاده شوند [ 5 ، 6 ]]. بر اساس دوربین دیجیتال داخلی، مستندات عکاسی کامل از جسم در همان زمان جمع آوری می شود. عکسها را میتوان بهعنوان اسناد جداگانه در فهرست قرار داد، یا میتوان آنها را به عنوان بافت به ابر نقطه اضافه کرد، که تجسم ابر نقطه را واقعیتر میکند. این ترکیب دو روش مستند یعنی اسکن لیزری و عکاسی، امکان به دست آوردن اطلاعات لازم را در مورد شی به ویژه اطلاعاتی در مورد عیوب، شکاف ها، ترک ها و غیره می دهد. تجدید حیات و اقتباس از معماری تاریخی یک مدل دقیق از ساختمان در فضای سه بعدی که از یک ابر نقطه ای به دست آمده است، مبنای بسیار خوبی برای انجام هرگونه اندازه گیری اضافی است. همچنین می تواند منبع قابل اعتمادی برای ایجاد مقاطع باشد، طرح های ساختمان و غیره. ارائه مدل نیز می تواند از هر نقطه نظر دلخواه (مثلاً بالا، کنار، پرسپکتیو) انجام شود. اثرات استفاده از اسکن لیزری در چنین زمینه ای در مقالات بسیاری ارائه شده است. به عنوان مثال، در [7 ]، نویسندگان نشان دادند که یک ابر نقطه ای ادغام شده با داده های یک دوربین برای تولید یک مدل مجازی سه بعدی دقیق از موزه تاریخی مولانا در قونیه، ترکیه استفاده شد. در [ 8 و 9 ]، نشان داده شد که چگونه مستندات کامل میراث فرهنگی بر اساس اسکن لیزری ایجاد شده است. اطلاعات اضافی توسط یک هواپیمای بدون سرنشین و فتوگرامتری دیجیتال ارائه شد.
شایان ذکر است که اسکن لیزری یک روش سنجش از راه دور فعال است. بنابراین، اندازهگیریهای اسکن با دسترسی به نور روز تعیین یا محدود نمیشوند. چنین استقلالی از منبع نور به ویژه برای اسکن در مکانهای تاریک و بدون نور مانند زیرزمینها، تونلها و مناطق زیرزمینی ارزشمند است. بنابراین، فناوری اسکن ابزار خوبی برای تهیه موجودی اشیاء قدیمی و تاریخی است که معمولاً مجهز به برق نیستند.
ابرهای نقطه ای به دست آمده از TLS با وضوح بسیار بالا مشخص می شوند. تجسم چنین مجموعه داده ای تصور یک سطح شبه پیوسته از جسم اندازه گیری شده را می دهد. تقریباً تمام جزئیات قابل مشاهده جسم اسکن شده را می توان به طور کامل بررسی کرد. با این حال، مناطقی در درون جسم وجود دارد که ساختار آن کمتر پیچیده است. بنابراین، تعداد زیادی از نقاط اندازه گیری شده ضروری نیست. به منظور کاهش تعداد نقاط در ابر نقطه و در عین حال حفظ تمام داده های لازم برای انجام موجودی از شی اسکن شده، نمونه برداری خودکار از ابر نقطه و تقسیم بندی آن پیشنهاد شده است. کاهش و تقسیم بندی ابرهای نقطه یک موضوع تحقیقاتی است که در ادبیات مستند شده است. در [ 10]، روش کاهش پیشنهادی مبتنی بر انحنا بود، و نویسندگان در [ 11 ] یک استراتژی نمونهگیری پایین تطبیقی را نشان دادند و کارایی محاسباتی و کیفیت بخشبندی آن را مورد بحث قرار دادند. رویکردهای متفاوتی برای کاهش داده ها در [ 12 ] ارائه شد. در اینجا، تمرکز بر فشرده سازی مش است. بررسی تقسیم بندی و طبقه بندی ابر نقطه ای در [ 13 ] ارائه شده است. شرح مفصلی از مزایا و معایب تقسیم بندی ابر نقطه ای را می توان در [ 14 ] یافت.
تا کنون، محققان یک برنامه تحقیقاتی کامل و موفق را انجام دادهاند که به کاهش مجموعه دادهها از اندازهگیریهای TLS مربوط به ساختمانها و سازهها اختصاص داده شده است، بهویژه در زمینه تشخیصهای فنی آنها [ 15 ، 16 ].]. در این مطالعات از روش OptD استفاده شد. روش OptD برای کاهش تعداد نقاط در نواحی همگن (سطوح بدون ترک و حفره) و حفظ نقاط بیشتری در جایی که نقص در دیوارها وجود داشت استفاده شد. در مطالعه حاضر، روش OptD به گونهای اصلاح شد که جدا از نمونهبرداری پایین از ابر نقطه، مجموعه دادهها تقسیمبندی شدند. تقسیم بندی شامل جداسازی گروه هایی از نقاط و نشان دهنده انواع مختلف و اندازه تغییرات در سطح دیوارها بود. تجزیه و تحلیل ابرهای نقطه ای در سیستم مختصات OXYZ انجام شد که به ما امکان می داد فرورفتگی ها (حفره ها و ترک ها) را در دیوار ساختمان تشخیص دهیم، یا در سیستم مختصات OXYI (“I” مخفف مقدار شدت TLS است) که به ما امکان داد. برای تشخیص تغییرات سطح موضعی دیوار، مانند تغییر رنگ، رطوبت، و زوال زیستی (گلسنگ و خزه). چنین تغییراتی در ساختمان ها و سازه ها اغلب با شرایط فنی ضعیف سطح همراه است. لازم به ذکر است که مقدار شدت TLS عمدتاً به خواص فیزیکی و شیمیایی نواحی اسکن شده بستگی دارد، مانند رنگ [17 ]، زبری [ 18 ] و اشباع [ 19 ، 20 ]. انتخاب نحوه تجزیه و تحلیل مجموعه داده (در سیستم های مختصات OXYZ یا OXYI) به کاربر بستگی دارد. همچنین می توان آن دو نسخه تحلیل را همزمان انجام داد.
تاکنون، روش OptD برای کاهش اندازه مجموعه داده، معمولاً بر اساس روش کلاسیک داگلاس-پوکر [ 21 ] استفاده میشده است، اگرچه روشهای تعمیم دیگر (به عنوان مثال، Visvalingham-Whyatt [ 22 ]، Opheim [ 23 ]]) نیز قابل استفاده است. هدف اصلی این مطالعه ارائه پتانسیل روش OptD اصلاح شده به عنوان ابزاری برای تشخیص خودکار تهدیدات در ساخت و ساز ساختمان است. اصلاح روش OptD امکان تشخیص ترک ها / شکاف ها در دیوارهای ساختمان و ارزیابی اولیه ماهیت تغییرات بررسی شده در ساختار جسم را فراهم می کند. انواع تغییرات و اهمیت و دامنه آنها توسط کاربر قابل تنظیم است. در این مقاله، نویسندگان از چهار دسته تغییر استفاده کردند، یعنی 0-بی ضرر، 1-برای موجودی، 2-نیاز به تعمیر و 3-خطرناک. این به ما این امکان را داد که تقریباً بلافاصله مناطق خطرناک را در سایت های اندازه گیری شده نشان دهیم.
ادامه این مقاله به شرح زیر سازماندهی شده است. بخش 2 روش Optimum Dataset و اصلاحات آن را معرفی می کند که کاهش و تقسیم بندی همزمان ابر نقطه را امکان پذیر می کند. ویژگی های اشیاء آزمایشی نیز در اینجا ارائه شده است. بخش 3 پردازش ابرهای نقطه ای از دو مکان را پوشش می دهد و اثرات تشخیص ترک ها / شکاف ها در دیوارهای ساختمان را نشان می دهد. نتایج به دست آمده در بخش 4 مورد بحث قرار گرفته است. بخش 5 به طور خلاصه جنبه های پردازش داده ها را خلاصه می کند و زمینه ای را که می توان روش OptD اصلاح شده را در آن اعمال کرد، نشان می دهد.
2. مواد و روشها
2.1. روش مجموعه داده بهینه و تغییرات آن
الگوریتم روش OptD در کارهای قبلی توسعه و ارائه شد [ 24 ، 25]. هدف اصلی روش OptD کاهش مجموعه داده های ارائه شده توسط فن آوری های جمع آوری داده های انبوه (به عنوان مثال، ابرهای نقطه از اسکن لیزری) بر اساس روش های تعمیم نقشه برداری است. مقدار داده های مشاهده/اندازه گیری را می توان در محدوده 0.05٪ تا 99.95٪ کاهش داد. میزان کاهش توسط کاربر تعیین می شود که بسته به هدف مطالعه و تعداد مجموعه داده های ورودی تصمیم می گیرد. الگوریتم روش به گونه ای عمل می کند که نوارهای اندازه گیری (L) در صفحه جسم (در این مورد، یک دیوار) ایجاد می شود. در هر نوار L، تجزیه و تحلیل مکان نقاط انجام می شود. تصمیم گیری در مورد حذف یا حفظ نقاط داده شده با انجام تعمیم نقشه برداری انجام می شود که در این مقاله با استفاده از روش داگلاس-پوکر [ 21 ] انجام شد.].
در این مطالعه، تعمیم در هواپیما OXZ انجام شد. بنابراین، تغییرات ارتفاع حفظ شد. با توجه به اینکه داده های ورودی توسط فناوری اسکن لیزری ارائه می شد، علاوه بر x، y و z، شدت سیگنال لیزر نیز ثبت شد. تغییرات در شدت، از جمله عوامل دیگر، به رطوبت و زوال زیستی مرتبط است. بنابراین، تجزیه و تحلیل با آزمایش های کیفی سطح دیوار گسترش یافت.
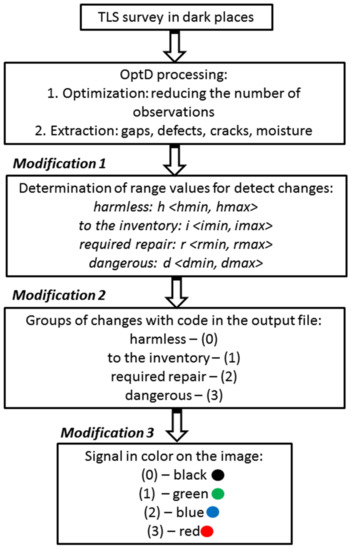
در این مطالعه، روش OptD به منظور انجام تقسیمبندی خودکار مجموعه دادهها و همچنین کاهش ابر نقطه اصلاح شد. میزان کاهش و دامنه تقسیم بندی به تشخیص عیوب در دیوار ساختمان مربوط می شود. اصلاح در سه سطح انجام می شود:
-
معرفی معیارهای داخلی اضافی در الگوریتم داگلاس-پیکر.
-
معرفی کدهایی در فایل خروجی برای اصلاح فایل خروجی file.txt. به هر نقطه کدی اختصاص داده می شود که نوع و وضعیت عیب را مشخص می کند: 0-بی ضرر، 1-برای موجودی، 2-نیاز به تعمیر، 3-خطرناک.
-
معرفی رنگ برای کدهای مربوطه برای اصلاح تصویر. هر رنگ وضعیتی از نقص را برجسته می کند: 0-سیاه، 1-سبز، 2-آبی، 3-قرمز.
اصلاحات معرفی شده در شکل 1 نشان داده شده است.
اولین اصلاح در مرحله تعیین اینکه آیا نقطه تجزیه و تحلیل شده حذف خواهد شد یا در مجموعه داده حفظ می شود، انجام می شود. اگر فاصله نقطه تجزیه و تحلیل شده تا خط پایه در الگوریتم داگلاس-پوکر از محدوده تحمل (t) بیشتر شود، می توان آن را به گروه نقاطی که نوع تغییر در دیوار را نشان می دهد اختصاص داد. این امکان وجود دارد زیرا کاربر علاوه بر محدوده تحمل (t)، میتواند مقادیر بازهها را برای تعیین میزان تغییر با وارد کردن درجه تغییر، یعنی بی ضرر ( h ) به موجودی ( i ) وارد کند. نیاز به تعمیر ( r ) و خطرناک ( d )، با مقادیر min و max، به ترتیب، به عنوان hmin و hmax، imin نشان داده شده است.و imax، rmin و rmax ، و dmin و dmax . اصلاح الگوریتم تعمیم در شکل 2 ارائه شده است .
اولین اصلاح مبنای اصلاح دوم است. نقاط نشان دهنده تغییرات (به عنوان مثال، شکاف ها و شکاف ها) در فایل ‘outputfile.txt’ با افزودن یک ستون با کدهای زیر نشان داده می شوند: h —code 0, i —code 1, r —code 2 و d —code 3.
اصلاح سوم شامل تجسم انواع تغییرات در دیوار با افزودن رنگ ها به ابر نقطه بر اساس کدهای اتخاذ شده است. برای این مقاله از طرح رنگی زیر استفاده شده است: 0-مشکی، 1-سبز، 2-آبی و 3-قرمز. چنین رویکردی امکان ارزیابی سریع وضعیت دیوار اسکن شده را فراهم میکند و فوراً آن بخشهایی از دیوار/ساختمان را که ممکن است در وضعیت خطرناکی نامناسب یا نیاز به بازسازی باشند نشان میدهد. طرح گردش کار با روش OptD اصلاح شده در شکل 3 نشان داده شده است .
روش OptD برای تشخیص و طبقه بندی عیوب دیوار در مراحل زیر انجام می شود:
-
خواندن مجموعه داده اندازه گیری TLS در قالب *.txt (مرحله 1).
-
تنظیم معیار بهینه سازی ( f ) (مرحله 2). ارزش این معیار بستگی به کاربر دارد. مقدار f برای تشخیص عیوب دیوار، درصدی از نقاط باقی مانده در مجموعه داده پس از کاهش در نظر گرفته می شود.
-
تعیین منطقه پردازش با یافتن حداقل و حداکثر مختصات در صفحه OXY (2D). به این ترتیب، یک ناحیه پردازش مستطیلی ایجاد می شود که در طول پردازش با OptD به نوارهای اندازه گیری ( L ) (مرحله 3) تقسیم می شود. نوارها می توانند افقی یا عمودی باشند. عرض نوار اندازه گیری به طور خودکار محاسبه می شود (بدون مشارکت کاربر) و در تکرارهای بعدی تنظیم می شود.
-
هر نوار اندازه گیری به طور جداگانه تجزیه و تحلیل می شود. در هر نوار نقاط اندازه گیری وجود دارد که یک منحنی را تشکیل می دهند (مرحله 4). منحنی با استفاده از روشهای تعمیم تعمیم مییابد، که در این مقاله روش اصلاحشده داگلاس-پوکر (مرحله 5) بود. ایجاد خطوط ایجاد شده توسط نقاط در نوارهای اندازه گیری همیشه در صفحه OXZ یا OYZ انجام می شود. بنابراین، تغییرات با تجزیه و تحلیل هندسه شناسایی می شوند. در این مرحله مقدار دامنه تحمل (t) تعیین می شود (مرحله 6).
-
پایان پردازش OptD زمانی رخ می دهد که روش تعمیم در تمام نوارهای اندازه گیری اعمال شود (مرحله 7). مجموعه داده ذخیره شده با معیار بهینه سازی تنظیم شده در مرحله 2 مطابقت دارد. عرض نوار اندازه گیری و محدوده تحمل میزان کاهش را تعیین می کند. بنابراین، این مقادیر در طول تکرار تغییر می کنند تا زمانی که مجموعه داده خروجی معیار بهینه سازی را برآورده کند (مرحله 8).
-
ابر نقطه TLS بهینه در یک فایل خروجی با فرمت txt. ذخیره می شود (مرحله 9). سپس کاربر می تواند از مجموعه داده کاهش یافته و طبقه بندی شده برای تجسم استفاده کند (مرحله 10).
2.2. اشیاء تست
در این مطالعه، دو مورد آزمون انتخاب شدند. آنها در Voivodeship Warminsko-Mazurskie در لهستان واقع شده اند. اولین شی که در شهر دوبره میاستو قرار دارد، خرابه های یک برج است که قطعاتی از دیوارهای قرون وسطایی حفظ شده است. دومی، واقع در شهر اولشتین، ساختمان مقر موسسه ژئودزی، دانشگاه وارمیا و مازوری است. دو شی آزمایشی، object1 و object2، در شکل 4 نشان داده شده است.
این بناها تحت پوشش موجودی دائمی قرار دارند و تحت حفاظت نگهبانان آثار تاریخی هستند. ساختمان انستیتوی ژئودزی به دلیل کارهای نوسازی که در مواقع نیاز انجام شد در وضعیت خوبی قرار دارد در حالی که در مورد خرابه های برج فقط قطعاتی وجود دارد که خطرناک نیستند. در زیرزمین های زیر این ساختمان ها اتاق هایی وجود دارد که به نور روز دسترسی ندارند. اندازه گیری اشیاء با اسکنر لایکا C-10 انجام شد. برای هر دو شی، قطعاتی از مجموعه مشاهدات انتخاب شدند که سپس با روش اصلاح شده OptD پردازش شدند. مجموعه دادههای بهدستآمده برای شی 1 دیوارها را نشان میدهند، در حالی که مجموعههای داده برای شی 2 نمایانگر سقفهای زیرزمین و دیوارهای زیرزمین هستند.
3. پردازش داده ها و نتایج
به منظور ایجاد صحیح معیارهای تقسیم بندی، نسخه اصلی روش OptD انجام شد که محاسبه مقدار تلورانس و سپس تنظیم معیارهای تقسیم بندی را امکان پذیر کرد. مقادیر L و t، همانطور که در جدول 1 مشاهده می شود ، در آخرین تکرار به دست آمد.
نتایج اصلاح دوم در جدول 2 ارائه شده است. در کنار موقعیت هر نقطه اندازه گیری شده و شدت آن، ستون کد اضافه شد. این قطعه ای از outputfile.txt است که متعلق به Object 1 fragment1 است.
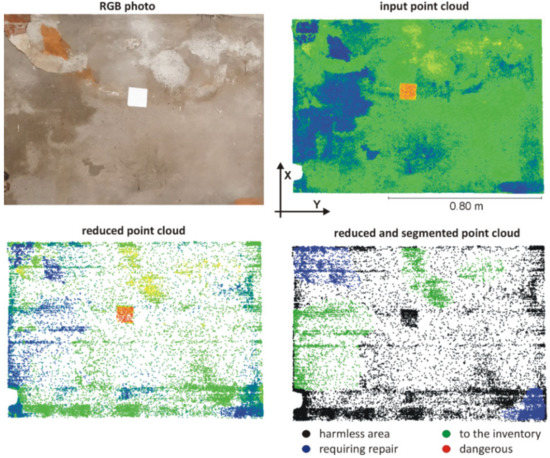
سومین تغییر را می توان در تجسم ابرهای نقطه ای مشاهده کرد. شکل 5 و شکل 6 نتایج نهایی عملکرد روش OptD اصلاح شده را نشان می دهد. در قطعات انتخاب شده زیرزمین (Object1) انواع مختلف تغییرات سطح به وضوح قابل مشاهده بود. برای شی 1، تقسیم بندی در سیستم مختصات OXYZ انجام شد، به این معنی که در مرحله 7 روش OptD در الگوریتم اصلاح شده داگلاس-پیکر، مختصات Z در نظر گرفته شد. این اجازه می دهد تا تغییرات هندسی قطعات بررسی شده از دیوار ثبت شود.
شکل 5 محل دقیق حفره ها را در سقف زیرزمین نشان می دهد. همانطور که مشاهده می شود قسمت های خطرناک سطح اسکن شده با رنگ قرمز مشخص می شوند. تعیین عیوب به روشی سریع و عینی، به ویژه در مکان هایی که برای یکپارچگی سازه ساختمان مهم است، امکان تشخیص سریع ساختمان را فراهم می کند تا اقدامات اصلاحی به منظور جلوگیری از به خطر افتادن پایداری شی یا حتی انجام شود. سقوط – فروپاشی.
همانطور که در شکل 6 مشاهده می شود ، تغییرات نیز به درستی شناسایی و طبقه بندی شدند. در مناطقی که گچ در حال ریزش بود، یک خطر اعلام شد.
در مورد شی 2، وضعیت متفاوت بود، زیرا در داخل زیرزمین، دیوارها حفره، شیار یا سوراخ نداشتند. تغییرات روی دیوارها فقط تغییر رنگ از جمله رطوبت بود که در تصاویر و در بررسی وضعیت زیرزمین به وضوح قابل مشاهده بود.
ترک های کوچک، رطوبت و تغییر رنگ روی سطوح دیوار نیاز به رویکرد دقیق تری دارد. معمولاً تشخیص این عیوب سطحی توسط مختصات فضایی در تحلیل صفحه OXYZ غیرممکن است. بنابراین، کاهش ابرهای نقطه ای به روشی متفاوت انجام شد، به عنوان مثال، با معرفی یک پارامتر ثبت شده اضافی، یعنی شدت. در آن مورد، بخشبندی با روش داگلاس-پیکر اصلاحشده در سیستم مختصات OXYI انجام شد.
البته باید توجه داشت که تغییر شدت (که در حین اجرای الگوریتم تحلیل می شود) می تواند تغییراتی در رطوبت، زبری و رنگ ایجاد کند. نقص سطح شناسایی شده ممکن است به معنای نقص دیوار باشد یا نباشد. چنین نوع تحلیلی را می توان به عنوان اطلاعات اضافی در مورد وضعیت فنی دیوار در نظر گرفت. کدها و رنگ های اختصاص داده شده به ما در مورد تغییر مقدار شدت اطلاع می دهند.
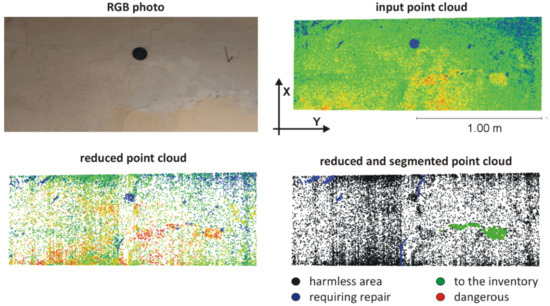
شکل 7 و شکل 8 نتایج نهایی عملکرد روش OptD اصلاح شده را به ترتیب برای object2 fragment1 و fragment2 در سیستم مختصات OXYI نشان می دهد.
همانطور که در شکل 7 مشاهده می شود ، مکان های تغییرات رطوبت نشان داده شده است. رطوبت سطح با جذب انرژی پرتو لیزر بر شدت سیگنال لیزر منعکس شده تأثیر می گذارد [ 19 ]. بنابراین، مکان های مرطوب/مرطوب در ابر نقطه قابل مشاهده است. تقسیم بندی در سیستم مختصات OXYI انجام شد، بنابراین اطلاعات رادیومتری از پرتو لیزر در اینجا تجزیه و تحلیل شد. چنین تجزیه و تحلیل سطوح آزمایش شده اجازه می دهد تا اقدامات اصلاحی، در این مورد، ضد آب انجام شود. اسکنهای بعدی که در مدت زمان معینی به دست میآیند میتوانند برای تعیین اینکه آیا رطوبت دیوارها فروکش کرده، در سطح مشابهی باقی میماند یا افزایش مییابد، استفاده میشود.
در شکل 8 می توان نحوه تشخیص ترک های دیوار را مشاهده کرد. OptD اصلاح شده بسیار دقیق مکان آنها را نشان می دهد، اگرچه تعیین عرض شکاف / شکاف دشوار بود.
نتایج ارائهشده و محدودههای معرفیشده برای کلاسهای فردی عمداً «اغراقآمیز» شدند تا عملکرد روش را نشان دهند. محدوده تحمل برای طبقات فردی را می توان بسته به نوع ساختمان (سن، نوع سازه) و موادی که ساختمان از آن ساخته و به پایان رسید (آجر، دال بتنی، گچ) تنظیم کرد. از روی ناهمواری دیوارها و همچنین از روی نوع آسیب می توان مقادیر مختلف hmin و hmax، imin و imax ، rmin و rmax و dmin و dmax را مشخص کرد.
4. بحث
استفاده از روش اصلاح شده OptD امکان کاهش قابل توجه داده های ابر نقطه ای به دست آمده و تشخیص ترک ها در اشیاء مورد بررسی را فراهم می کند. تقسیم بندی خودکار تقریباً بلافاصله انواع مختلفی از تغییرات را از مناطق بی خطر تا خطرناک نشان می دهد. تجسم ابر نقطه تقسیمبندی شده امکان اندازهگیری را در منطقه خطرناک میدهد. در آزمایشات ما، بیشترین تغییرات در ساختار دیوار برای قطعه شی 1 شناسایی شد. پارامتر dmax به عنوان مقدار تا 1000 متر وارد شد. بزرگترین تغییر 0.321 متر برای یک منطقه بزرگ از تغییرات متمایز به عنوان خطرناک بود. تغییر در شکل 9 نشان داده شده است .
در کنار اندازهگیریهای مدل سهبعدی، میتوان تحلیلهای اضافی (اولیه) را نیز انجام داد. جدول 3 نشان می دهد که چند نقطه در هر یک از اشیاء بررسی شده بر اساس کدهای ثابت طبقه بندی شده است.
همانطور که در جدول 3 مشاهده می شود ، فقط در قطعه Object1 یک منطقه وسیع وجود داشت که به طور بالقوه کاملاً خطرناک بود که تقریباً 25٪ از تمام نقاط اندازه گیری شده را شامل می شد. قطعات خطرناک نیز در قطعه 2 از Object1 (حدود 1.5٪ از تمام نقاط) نشان داده شد. نقاطی که به عنوان “برای تعمیر” برای هر دو قطعه اختصاص داده شد حدود 2٪ از تمام نقاط بود. در Object2، هیچ بخش خطرناکی وجود نداشت. با این حال، تقریبا 2٪ از نقاط تجزیه و تحلیل در قطعه 1 و 9٪ در قطعه2 به عنوان “برای تعمیر” اختصاص داده شد.
از تعداد نقاط اختصاص داده شده به کدهای خاص و اطلاعات مربوط به وضوح اسکن لیزری می توان برای محاسبه مساحت عیوب استفاده کرد. جدول 4 مناطق محاسبه شده برای گروه های امتیازی را ارائه می دهد. بر اساس این اطلاعات، یک ارزیابی اولیه از هزینه های بالقوه تعمیر یا بازسازی می تواند انجام شود. در مطالعه ما، منطقه خطرناک در Object1 fragment1 حدود 7٪ از کل سطح اندازه گیری شده بود، و “منطقه تعمیر” بین 1٪ و 2٪ برای Object1 fragment1، Object2 fragment1، و Object2 fragment2، و 7٪ برای Object1 بود. قطعه 2.
لازم به ذکر است که اسکن اشیاء مورد بررسی در تاریکی مطلق انجام شد. عدم نیاز به روشن شدن جسم، TLS را به یک فناوری بسیار خوب تبدیل می کند که می تواند برای اهداف موجودی استفاده شود، به خصوص در مورد اشیاء در معرض خطر که دسترسی به نور روز یا برق بسیار محدود است.
بر اساس آزمایش های انجام شده می توان بیان کرد:
-
روش OptD اصلاح شده به پیش پردازش داده های TLS به دست آمده به منظور بررسی تغییرات در ساختارهای شی اختصاص داده شده است.
-
تجزیه و تحلیل ها بر روی مجموعه داده ای که کاهش یافته است انجام می شود. نقاطی که در مجموعه داده باقی می مانند به طور خودکار به انواع تغییرات تقسیم می شوند.
-
نتایج تقسیم بندی با افزودن کدهای مشاهده از 0 تا 3 در فایل خروجی قابل مشاهده است. تعداد کدها می تواند به صورت دلخواه توسط کاربر انتخاب شود.
-
به هر کد رنگ خاصی اختصاص داده می شود که در طول تجسم ابر نقطه استفاده می شود، که امکان شناسایی سریع تغییرات قابل توجه در ساختار شی را فراهم می کند.
-
با توجه به سادگی نسبی گردش کار روش پیشنهادی و امکان تشخیص سریع شی مورد تجزیه و تحلیل، روش OptD اصلاح شده ممکن است به عنوان ابزاری مناسب در هنگام موجودی سازه ها در نظر گرفته شود.
5. نتیجه گیری ها
در این مقاله، پتانسیل روش OptD اصلاح شده به عنوان ابزاری برای تشخیص خودکار تهدیدات در ساخت و ساز ساختمان ارائه شده است. اسکن ساختمان، حتی اگر نور روز وجود نداشته باشد، داده های قابل اعتمادی را در قالب یک ابر نقطه ای ارائه می دهد. مجموعه داده بهدستآمده در معرض کاهش و تقسیمبندی کاملاً خودکار به منظور شناسایی و ارزیابی تغییرات در سطح شیء قرار میگیرد. نویسندگان کمترین درصد امتیاز ممکن را در مجموعه داده پس از کاهش ( f = 1٪) پذیرفتند. هدف این است که تعداد نقاط داده را تا حد امکان کم نگه دارید و در عین حال تغییراتی را در ساختار قابل مشاهده کنید. OptD تعداد مشاهدات در مجموعه داده را کاهش می دهد، به همین دلیل است که یک الگوریتم تعمیم داخلی دارد. بنابراین، انجام یک کاهش کوچک (به عنوان مثال، f= 99٪ منجر به ثبت هیچ تغییری نمی شود، و روش اصلاح شده Douglas-Peucker OptD کدهایی را به نقاط داده اختصاص نمی دهد، اما دقیقاً همان نتیجه ای را به دست می دهد که اندازه گیری ابر نقطه ای را نشان می دهد. البته، مجموعه داده مشاهدات را نمی توان “بی پایان” کاهش داد. با توجه به هدف مطالعه، هر مجموعه داده باید به صورت جداگانه بررسی شود.
به طور خلاصه، اصلاح الگوریتم داگلاس-پوکر در روش OptD نه تنها باعث کاهش تعداد مشاهدات، حفظ تنها مواردی که در این نوع مطالعه اهمیت دارند، بلکه عملکرد بخشبندی را نیز به گونهای ممکن میسازد. یک معمار، یک محافظ بنای تاریخی، یا یک کارگر ساختمانی می تواند فورا متوجه ناحیه ای از سازه شود که نیاز به کنترل دارد.
در مورد ساختمانهای تاریخی، سطح اضطراری به استانداردهایی بستگی دارد که بر اساس نوع مصالح ساختمان یا فناوری ساخته شده است. آستانه های پیشنهادی شامل موارد زیر است: بی ضرر (h)، برای موجودی (i)، نیاز به تعمیر (r) و خطرناک (d)، هر کدام دارای مقادیر min و max مربوط به خود، یعنی hmin و hmax ، imin و imax ، rmin و rmax و dmin و dmax، برای هر ساختمان به صورت جداگانه تعیین می شود. اطلاعات جمع آوری شده در طول تجزیه و تحلیل ابر نقطه (به عنوان مثال، تعداد نقاط اختصاص داده شده به کدهای خاص، منطقه ای که تغییرات رخ داده است) می تواند به عنوان مبنایی برای برنامه ریزی کارهای مربوط به حفاظت و/یا بازسازی ساختمان های قدیمی استفاده شود. محدوده تغییرات و اطلاعات مربوط به رطوبت برای تخمین هزینه های مورد انتظار تعمیر یا بازیابی بسیار مهم یا حتی ضروری است.
راه حل های پیشنهادی همراه با افراد مجرب در زمینه موجودی ساختمان باید زمان و کار لازم در این نوع کارها را به میزان قابل توجهی کاهش دهد. بنابراین، نویسندگان فرض میکنند که روش OptD در نسخه پیشنهادی میتواند توسط محافظان آثار تاریخی، متخصصان امنیتی، مدیران ساختمان، افرادی که با ارزشگذاری املاک سروکار دارند و کارشناسان ارزشگذاری خدمات تعمیرات استفاده شود.
منابع
- پاولیدیس، جی. کوتسودیس، ع. آرناوتگلو، ف. تسیوکاس، وی. چمزاس، سی. روشهای دیجیتالی سازی سه بعدی میراث فرهنگی. J. Cult. میراث. 2007 ، 8 ، 93-98. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فرگونیز، ال. باربیری، جی. بیولزی، ال. بوچیارلی، ام. فریگری، ع. Taffurelli، L. بررسی و نظارت برای ارزیابی آسیب پذیری یک ساختمان باستانی. Sensors 2013 , 13 , 9747-9773. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- دل پوزو، اس. هررو-پاسکوال، جی. فیلیپه گارسیا، بی. هرناندز-لوپز، دی. رودریگز-گونزالوز، پ. González-Aguilera، D. تجزیه و تحلیل رادیومتری چندطیفی نماها برای تشخیص آسیب شناسی از سنجش از دور فعال و غیرفعال. از راه دور. Sens. 2016 ، 8 ، 80. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کورسو، جی. روکا، جی. بیل، F. تجزیه و تحلیل هندسی بر روی نماهای سنگی با فناوری اسکنر لیزری زمینی. Geosciences 2017 ، 7 ، 103. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- آلبی، ای. گرسن مایر، پی. از ابر نقطه ای تا مدل سه بعدی، روش های مدل سازی مبتنی بر دانش معماری به کار رفته در قلعه شاتل-سور-موسل (فرانسه). ISPRS Int. قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2012 ، 39 ، 75-80. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پرویتالی، م. بارازتی، ال. برومانا، آر. کوکا، بی. اورنی، د. Roncoroni، F. Scaioni، M. مدلسازی خودکار نما با استفاده از دادههای ابر نقطهای برای مقاومسازی کارآمد انرژی. Appl. Geomat. 2014 ، 6 ، 95-113. [ Google Scholar ] [ CrossRef ]
- آلتونتاس، سی. یلدیز، ف. Scaioni، M. اسکن لیزری و یکپارچه سازی داده ها برای ضبط دیجیتالی سه بعدی سازه های تاریخی پیچیده: مورد موزه مولانا. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 18. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- جو، YH; Hong, S. مستندات دیجیتال سه بعدی سایت میراث فرهنگی بر اساس همگرایی اسکن لیزری زمینی و فتوگرامتری وسایل نقلیه هوایی بدون سرنشین. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 53. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- یاستیکلی، ن. مستندسازی میراث فرهنگی با استفاده از فتوگرامتری دیجیتال و اسکن لیزری. J. Cult. میراث. 2007 ، 8 ، 423-427. [ Google Scholar ] [ CrossRef ]
- دو، X. Zhuo, Y. روش کاهش داده های ابر نقطه ای بر اساس انحنا. در مجموعه مقالات دهمین کنفرانس بین المللی IEEE در مورد طراحی صنعتی به کمک کامپیوتر و طراحی مفهومی، ونژو، چین، 26-29 نوامبر 2009. ص 914-918. [ Google Scholar ]
- لین، ی.-جی. بنزیگر، آر آر. حبیب، الف. نمونهبرداری پایین تطبیقی مبتنی بر مسطح از ابرهای نقطهای. فتوگرام مهندس Remote Sens. 2016 , 82 , 955–966. [ Google Scholar ] [ CrossRef ]
- ماگلو، ا. لاوو، جی. دوپون، اف. Hudelot, C. 3D Mesh Compression: Survey, Comparisons, and Emerging Trends. کامپیوتر ACM. Surv. 2015 ، 47 ، 1-44. [ Google Scholar ] [ CrossRef ]
- گریلی، ای. منا، اف. Remondino، F. مروری بر الگوریتم های تقسیم بندی و طبقه بندی ابرهای نقطه ای. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 42 ، 339-344. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نگوین، ا. Le, B. تقسیم بندی ابر نقطه سه بعدی: یک بررسی. در مجموعه مقالات کنفرانس IEEE در مورد رباتیک، اتوماسیون و مکاترونیک، RAM، مانیل، فیلیپین، 12 تا 15 نوامبر 2013. [ Google Scholar ]
- سوچوکی، سی. Błaszczak-Bąk، W. نمونه برداری پایین از ابرهای نقطه ای برای تشخیص فنی ساختمان ها و سازه ها. Geosciences 2019 ، 9 ، 70. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سوچوکی، سی. Błaszczak-Bąk، W. Damięcka-Suchocka، M. جاگودا، م. Masiero, A. مثالی از استفاده از روش OptD برای بهینه سازی ابرهای نقطه ای در عیب یابی ساختمان ها. در مجموعه مقالات چهارمین سمپوزیوم مشترک بین المللی در مورد پایش تغییر شکل (JISDM)، آتن، یونان، 15 تا 17 مه 2019. [ Google Scholar ]
- ووگل، تی. شواب، آی. Landes, T. تأثیرات مواد مختلف در اندازه گیری یک اسکنر لیزری زمینی (TLS). بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2008 ، 37 ، 1061-1066. [ Google Scholar ]
- اورن، ام. نایار، SK تعمیم مدل بازتابی لامبرت. در مجموعه مقالات بیست و یکمین کنفرانس سالانه گرافیک کامپیوتری و تکنیک های تعاملی-SIGGRAPH ’94 ; ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 1994; صص 239-246. [ Google Scholar ]
- سوچوکی، سی. Katzer, J. اسکن لیزری زمینی برای تشخیص رطوبت در مصالح ساختمانی – مشکلات و محدودیتها. خودکار ساخت و ساز 2018 ، 94 ، 127-134. [ Google Scholar ] [ CrossRef ]
- سوچوکی، سی. جاگودا، م. اوبوچوفسکی، آر. شلیکاس، دی. Sužiedelytė-Visockienė, J. خواص شدت سیستم لیزر زمینی در اندازه گیری شرایط فنی سازه های معماری. مترو Meas. سیستم 2018 , 25 . [ Google Scholar ] [ CrossRef ]
- داگلاس، دی اچ. الگوریتم های Peucker، TK برای کاهش تعداد نقاط مورد نیاز برای نمایش یک خط دیجیتالی یا کاریکاتور آن. کارتوگر. بین المللی جی. جئوگر. Inf. جئوویس. 1973 ، 10 ، 112-122. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Visvalingam، M. وایات، تعمیم خط JD با حذف مکرر نقاط. کارتوگر. J. 1993 ، 30 ، 46-51. [ Google Scholar ] [ CrossRef ]
- اوفیم، اچ. صاف کردن یک منحنی دیجیتالی با روشهای کاهش داده. یوروگراف. دانشیار 1981 . [ Google Scholar ] [ CrossRef ]
- Blaszczak-Bak، W. روش جدید بهینه مجموعه داده در پردازش LiDAR. Acta Geodyn. ژئومتر. 2016 ، 13 ، 381-388. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Błaszczak-Bąk، W. Sobieraj-Żłobińska، A.; Kowalik، M. روش OptD-multi در پردازش LiDAR. Meas. علمی تکنولوژی 2017 ، 28 ، 75009. [ Google Scholar ] [ CrossRef ]
شکل 1. اصلاحات پیشنهادی در روش داده بهینه (OptD). TLS اسکن لیزری زمینی است.
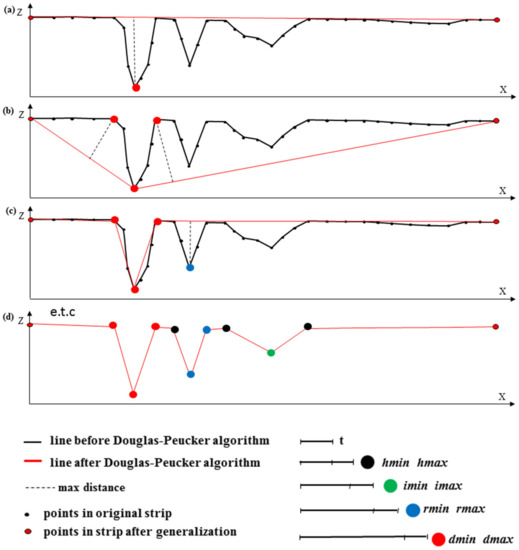
شکل 2. اصلاح الگوریتم داگلاس-پوکر ( الف ) منحنی اصلی ( ب ) تکرار اول ( ج ) منحنی تکرار دوم ( d ) پس از الگوریتم اصلاح شده.
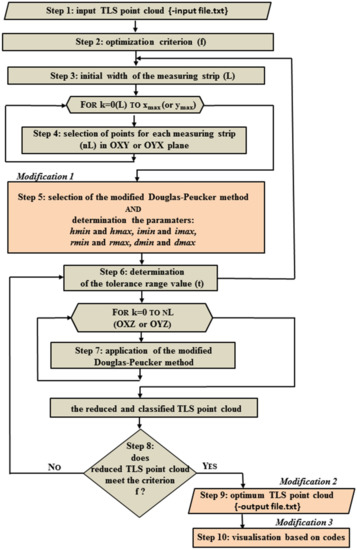
شکل 3. گردش کار با روش OptD برای تشخیص عیوب دیوار.

شکل 4. Object1 ( a ) و object2 ( b ) (منبع: عکسبرداری شده توسط Anna Skrzypińska).
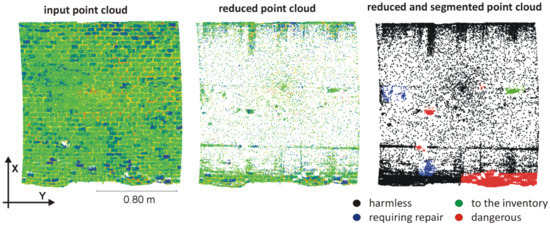
شکل 5. تجسم عیوب در دیوار آجری شناسایی شده از طریق روش اصلاح شده OptD – Object1 fragment1. تقسیم بندی در سیستم مختصات OXYZ انجام شد.

شکل 6. تجسم عیوب در دیوار آجری شناسایی شده از طریق روش اصلاح شده OptD-object1 fragment2. تقسیم بندی در سیستم مختصات OXYZ انجام شد.
شکل 7. مشاهده عیوب در دیوار شناسایی شده از طریق روش اصلاح شده OptD-object2 fragment1. تقسیم بندی در سیستم مختصات OXYI انجام شد.
شکل 8. مشاهده عیوب در دیوار شناسایی شده از طریق روش اصلاح شده OptD-object2 fragment2. تقسیم بندی در سیستم مختصات OXYI انجام شد.
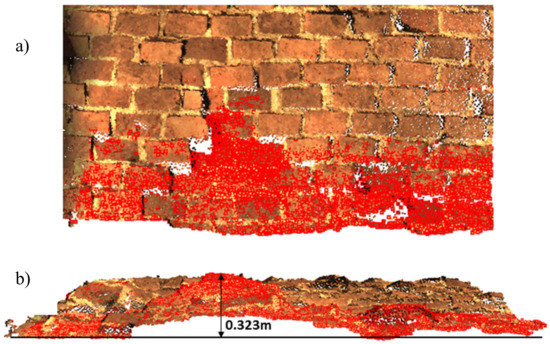
شکل 9. حداکثر نقص دیوار آجری برای Object2. ( الف ) نمای جانبی، ( ب ) نمای بالا.


بدون دیدگاه