1. معرفی
خط کشی جاده عناصر مهم نقشه های با دقت بالا هستند که به طور فزاینده ای برای مدیریت و هدایت فعالیت های ترافیکی در حمل و نقل هوشمند مورد استفاده قرار می گیرند [ 1 ، 2 ]. سیستمهای اسکن موبایل LiDAR (MLS) میتوانند به سرعت ابرهای نقطهای 3 بعدی متراکم و دقیق از محیطهای جاده را به دست آورند. در طول دهه گذشته، سیستمهای MLS تک پرتو مجهز به اسکنرهای لیزری تک پرتو، مانند اسکنرهای Riegl [ 3 ، 4 ، 5 ]، به دلیل عملکرد بسیار دقیقشان، به طور گسترده در موجودی جادهها و نقشهبرداری جادهها استفاده شدهاند. با این حال، آنها برای استفاده توسط طیف گسترده ای از مصرف کنندگان بسیار گران هستند. در سال های اخیر، اسکنرهای چند پرتو، مانند اسکنرهای Velodyne [ 6 ، 7، 8 ]، به دلیل هزینه کم و نمای چند زاویه ای، به تدریج برای رانندگی هوشمند مورد استفاده قرار می گیرند. ابرهای نقطهای که توسط سیستمهای MLS چند پرتو به دست میآیند، اغلب متراکمتر از ابرهای بهدستآمده توسط سیستمهای MLS تک پرتو هستند. با این حال، به دلیل دقت کمی پایینتر در اندازهگیری محدوده و زاویه و خطاهای داخلی در بین لیزرهای چند پرتو، نویزتر هستند. بنابراین، استخراج کارآمد و دقیق خط کشی جاده با این دستگاه ها هنوز یک کار چالش برانگیز است.
روش مبتنی بر تصویر ویژگی یکی از رایج ترین روش های مورد استفاده است. نقاط سه بعدی ابتدا به تصاویر دو بعدی تبدیل می شوند و سپس علامت گذاری جاده ها از روی تصاویر مشخصه شناسایی می شوند. یانگ و همکاران [ 9 ] یک درون یابی با وزن معکوس فاصله (IDW) را برای نمایش ابرهای نقطه ای بر روی یک تصویر ویژگی جغرافیایی ارجاع داده شده اتخاذ کرد، پس از آن تصویر ویژگی جغرافیایی مرجع با تجزیه و تحلیل تفکیک گسسته تقسیم می شود و خطوط کلی خطوط جاده بر اساس دانش معنایی استخراج می شود. گوان و همکاران [ 10 ] یک درونیابی IDW اصلاح شده را برای تولید تصاویر شدت جغرافیایی اعمال کرد و سپس تصاویر شدت جغرافیایی مرجع را با استفاده از هیستوگرام اختلاف همسایه وزنی تقسیم کرد و با استفاده از رای گیری تانسور چند مقیاسی، خط کشی های جاده را استخراج کرد. کومار و همکاران [ 11] از یک آستانه وابسته به محدوده و عملیات مورفولوژیکی باینری برای استخراج علائم جاده از تصاویر شدت جغرافیایی استفاده کرد. یونگ و همکاران [ 12 ] معادله لاپلاس را برای تولید تصاویر شطرنجی پیادهسازی کرد، پس از آن علامتگذاریهای خطوط با یک الگوریتم حداکثر انتظار از هم جدا شدند. تبدیل حجم زیادی از نقاط سه بعدی به تصاویر دو بعدی می تواند پیچیدگی محاسبات را به طور موثر کاهش دهد [ 13 ]. با این حال، ممکن است منجر به استخراج ناقص و نادرست شود [ 14 ].
برای جلوگیری از از دست دادن دقت ناشی از فرآیند تبدیل فوق، برخی از محققان نقاط MLS بدون ساختار را در یک ساختار داده خاص سازماندهی کردند، پس از آن خطوط جاده مستقیماً توسط برخی قوانین استخراج شدند. یانگ و همکاران [ 15 ] نقاط MLS را در یک ساختار درختی با ابعاد k (kd) سازماندهی کرد و خط کشی های جاده را با توجه به شدت و شیب شدت همسایگی استخراج کرد. با این حال، روش سازمان دهی درخت kd زمان بر است. برای کاهش اندازه ساختار داده، یو و همکاران. [ 16 ] سطوح جاده را به بلوک های چند بخش در امتداد جهت رانندگی تقسیم کرد و نقاط علامت گذاری جاده را با استفاده از یک الگوریتم آستانه بر اساس مقدار شدت بهینه هر بلوک استخراج کرد. وانگ و همکاران [ 17] از یک فیلتر عبوری برای انتخاب نشانههای جاده از بلوکهای قطعهبندی شده مبتنی بر مسیر GPS استفاده کرد، اما در روش آنها، نقاطی با مقادیر کم شدت در لبههای علامتگذاری ممکن است نادیده گرفته شوند. برای استخراج نقاط در لبه های علامت گذاری، Yan et al. [ 18 ] نقاط MLS را با توجه به میدان زاویه به خطوط مختلف اسکن جدا کرد و سپس خطوط جاده را بر اساس گرادیان شدت استخراج کرد. خطوط اسکن ساختارهای داده ساده و قابل اعتمادی هستند و بسیاری از محققان ترجیح می دهند از آنها استفاده کنند.
اخیراً روشهای مبتنی بر یادگیری عمیق به دلیل ظرفیت محاسباتی قدرتمند آنها برای تشخیص علائم جادهها پیشنهاد شدهاند. سویلان و همکاران [ 19 ] پارامترهای هندسی و توزیع پیکسلهای خطکشی جاده را محاسبه کرد و سپس گذرگاههای عابر پیاده و پنج کلاس پیکان توسط یک شبکه پیشخور دو لایه استخراج شد. ون و همکاران [ 20 ] یک شبکه تقسیمبندی U-net در سطح پیکسل برای استخراج علائم جاده ایجاد کرد. چن و همکاران [ 21 ] یک مدل یادگیری عمیق مبتنی بر شبکه هرمی با ویژگی متراکم را پیشنهاد کرد که برای استخراج خطکشیهای جاده آموزش داده شد. چنگ و همکاران [ 22] سطوح جاده را به شکل تصاویر شدت شطرنجی درآورد، و سپس با استفاده از یک استراتژی آستانه شدت بر اساس عادی سازی شدت بدون نظارت و یک استراتژی یادگیری عمیق، علامت گذاری جاده استخراج شد. روشهای مبتنی بر یادگیری عمیق میتوانند بدون ویژگیهای طراحی انسانی به دقت بالایی دست یابند، اما این روشها به آموزش تعداد زیادی از نمونههای برچسبدار وابسته هستند و بسیار زمانبر هستند. به طور کلی، روشهای یادگیری غیرعمیق برای شناسایی سریع مناطق علامتگذاری جاده و سپس روشهای یادگیری عمیق برای تشخیص دقیق نوع علامتگذاری جاده استفاده میشوند.
روشهای تشخیص قبلی هنگام استخراج نشانههای جاده از نقاط MLS تک پرتو به خوبی عمل میکردند، اما به دلیل ویژگیهای متراکم و پر سر و صدا ابرهای نقطه چند پرتوی، نمیتوانستند دادههای MLS چند پرتو را به طور مؤثر پردازش کنند. برای غلبه بر این محدودیت، این مقاله روشی دقیق برای تشخیص علائم جاده از ابرهای نقطهای پر سر و صدا پیشنهاد میکند. روش پیشنهادی بر روی دو هدف زیر متمرکز است:
- (1)
-
ایجاد یک استراتژی کارآمد و قابل اعتماد برای کاهش تعداد ابرهای نقطه ای که باید پردازش شوند، از جمله ساختار داده سازمانی مبتنی بر خط شبه اسکن که می تواند برای استخراج علامت گذاری جاده از ابرهای نقطه سه بعدی متراکم استفاده شود.
- (2)
-
ارائه یک فیلتر میانی پنجره تطبیقی مبتنی بر چگالی برای سرکوب نویز در سطوح مختلف چگالی و شدت نویز نقطه ای ابرهای MLS و همچنین یک روش تشخیص محدودیت لبه نشانگر (MECD) برای استخراج لبه علامت گذاری جاده.
ساختار مقاله به شرح زیر است. بخش بعدی فرآیندهای مربوط به روش پیشنهادی را تشریح می کند. بخش 3 نتایج استخراج یک ارزیابی کمی و یک مطالعه مقایسه ای را تجزیه و تحلیل می کند. در بخش 4 ، بحثی برای توصیف کاربرد روش تشخیص پیشنهادی ارائه شده است. نتیجه گیری در بخش 5 ارائه شده است .
2. روش
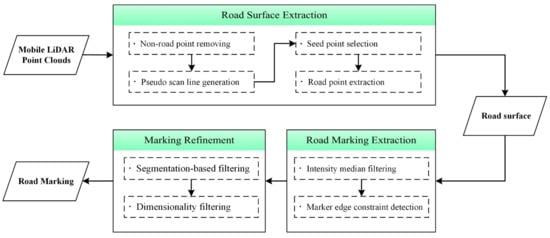
روش پیشنهادی به سه مرحله تقسیم شد: (1) استخراج سطح جاده، (2) استخراج خط کشی جاده، (3) اصلاح خط کشی جاده. ابتدا یک فیلتر نقطه غیر جاده ای برای حذف بیشتر نقاط غیر جاده ای اعمال شد و سپس نقاط باقی مانده به خطوط شبه اسکن مختلف تقسیم شدند. سطح جاده دقیقاً با استفاده از یک فیلتر پنجره متحرک گسترده استخراج شد. نشانههای جاده مستقیماً با استفاده از روش تشخیص محدودیت لبه نشانگر (MECD) پس از فیلتر میانی پنجره تطبیقی مبتنی بر چگالی اطلاعات شدت استخراج شد. در نهایت، نقاط غیر علامت گذاری توسط یک فیلتر مبتنی بر تقسیم بندی و یک فیلتر ابعاد حذف شدند. نمای کلی روش پیشنهادی در شکل 1 نشان داده شده است .
2.1. استخراج سطح جاده
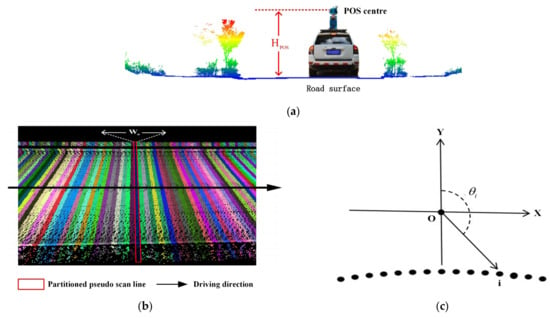
استخراج سطح جاده و خط کشی جاده از تعداد زیادی از نقاط سه بعدی بدون ساختار، زمان بر و دشوار است. همانطور که در شکل 2 نشان داده شده است، سطح جاده در زیر مراکز POS (سیستم موقعیت یابی و جهت گیری) و ارتفاع POS قرار داشت. اچPOS، که فاصله یک مرکز POS تا سطح جاده است، در طول اکتساب داده ها تقریباً بدون تغییر باقی ماند. برای کاهش تعداد نقاط، یک فیلتر نقطه ای غیر جاده ای بر اساس اختلاف ارتفاع اعمال شد. Δساعتبین مسیر و هر نقطه. در صورت وجود یک نقطه حذف شد Δساعتدر محدوده از سقوط کرد اچPOS – اچهفتمبه اچPOS + اچهفتم. آستانه از پیش تعریف شده اچهفتممعمولاً روی 0.5 متر تنظیم می شود.
برای ساده سازی ساختار داده ابرهای نقطه و بهبود کارایی محاسباتی، نقاط باقیمانده به مجموعه ای از خطوط شبه اسکن متوالی با یک آستانه عرض تقسیم شدند. دبلیوهفتم، عمود بر جهت رانندگی، همانطور که در شکل 2 الف نشان داده شده است. در همین حال، هر خط شبه اسکن به سیستم مختصات محلی مربوطه خود تبدیل شد. همانطور که در شکل 2 ب نشان داده شده است، سیستم مختصات محلی به عنوان سیستم راست دست ساخته شده است و نقاط داخل سیستم مختصات محلی به ترتیب کاهش زوایای قطبی خود مرتب شده اند. θمن. در پردازش بعدی، نقاط جاده و نقاط علامتگذاری جاده، خط به خط اسکن، در سیستمهای مختصات محلی استخراج میشوند. دبلیوهفتممعمولاً بسته به فاصله متوسط فاصله بین خطوط اسکن مجاور، مانند 0.05 متر تا 0.1 متر در آزمایشات ما تنظیم می شود.
در اکثر صحنه های جاده، سطوح جاده به دو نوع معمولی طبقه بندی می شوند. همانطور که در شکل 3 الف نشان داده شده است، سطوح جاده I به طور مستقیم با حاشیه ها محدود می شوند. همانطور که در شکل 3 ب نشان داده شده است، سطوح جاده II با حاشیه محدود نمی شوند بلکه توسط کانال های زهکشی جدا می شوند. در یک خط شبه اسکن، یک پرش ارتفاعی بین مرز جاده و حاشیه سطوح جاده I وجود دارد. از آنجایی که کانال های زهکشی را نمی توان به طور کامل اسکن کرد، یک پرش فاصله افقی یا یک پرش ارتفاعی بین مرز جاده و حاشیه وجود دارد. سطوح جاده II. حاشیه ها یا کانال های زهکشی به عنوان مرزهایی در نظر گرفته می شوند که سطوح جاده و روسازی را از هم جدا می کنند. بنابراین، سطح جاده را می توان با تشخیص ویژگی های پرش استخراج کرد.
همانطور که در شکل 3 نشان داده شده است، برای استخراج نقاط سطح جاده، یک فیلتر پنجره متحرک توسعه یافته ایجاد کردیم . در یک خط شبه اسکن، نقطه ای که درست زیر و نزدیکترین مسیر به مسیر است باید به عنوان نقطه شروع انتخاب شود. تعداد معینی از نقاط (معمولاً 20 نقطه را تعریف می کنند) در یک پنجره مناسب قرار می گیرند و سپس با استفاده از الگوریتم برازش حداقل مربعات به عنوان یک خط مستقیم برازش می کنند. از نقطه بذر تا لبه های بیرونی خط شبه اسکن، پنجره به گونه ای طراحی شده است که برای تشخیص ویژگی های پرش، نقطه به نقطه حرکت می کند. این فیلتر به سمت دیگر خط شبه اسکن اعمال می شود یا زمانی که دو نقطه مجاور به عنوان نقاط غیر جاده ای تعیین شوند یا یک پرش در فاصله در سمت فعلی تشخیص داده شود. هر دو معیار مربوط به ویژگی های پرش به صورت زیر تعریف می شوند.
- (1)
-
معیار پرش ارتفاع. از آنجایی که ارتفاع نقاط جاده در یک منطقه محلی تقریباً بدون تغییر است، یک نقطه بالقوه به عنوان نقطه جاده تعیین می شود اگر فاصله از نقطه تا خط نصب شده کمتر از آستانه باشد. Eهفتم. Eهفتمنشان دهنده اختلاف ارتفاع بین نقاط در مرز جاده و نقاط در حاشیه است و در اینجا 0.04 متر تنظیم شده است.
- (2)
-
معیار پرش فاصله افقی. فاصله از نقطه فعلی تا بیرونی ترین نقطه در پنجره محاسبه می شود. اگر فاصله از آستانه بزرگتر باشد نقطه به عنوان نقطه غیر جاده ای تعیین می شود Dهفتم. Dهفتمعرض کانال زهکشی را نشان می دهد و در اینجا روی 0.7 متر تنظیم شده است زیرا کانال های زهکشی در محیط جاده مجموعه داده ها نسبتاً باریک هستند.
2.2. استخراج علامت گذاری جاده ها
2.2.1. فیلتر میانه شدت
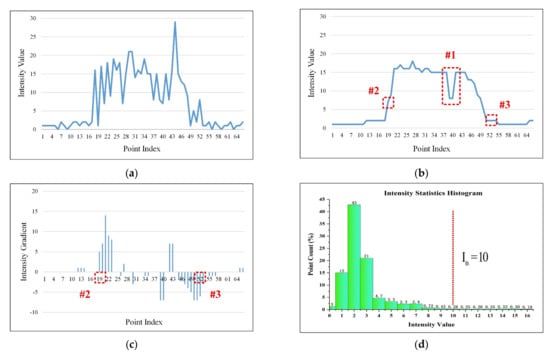
انرژی پالس تا حد زیادی تحت تاثیر فاصله اسکن [ 23 ، 24 ] قرار می گیرد. به طور کلی، مقادیر شدت ثبت شده توسط نقاط علامت گذاری جاده با افزایش فاصله اسکن کاهش می یابد. در اصل اکتساب سیستمهای MLS چند پرتوی، پرتوهای مختلف ابرهای نقطهای را در فواصل اسکن غیر متوالی جمعآوری میکنند. همانطور که در شکل 4 الف نشان داده شده است، مقادیر شدت نقاط علامت گذاری جاده به شدت در یک خط شبه اسکن در نوسان است. شدت ناپایدار تشخیص دقیق لبه های علامت گذاری را دشوار می کند. بنابراین لازم است مقادیر شدت نقاط جاده صاف شود.
فیلتر میانه خطی است و از میانه شدت نقاط در پنجره فیلتر استفاده می کند تا مقدار شدت یک نقطه در مرکز پنجره را برای سرکوب نویز جایگزین کند. از آنجایی که تراکم نقاط دور از مسیر کاهش می یابد، مقادیر شدت نقاط در لبه های علامت گذاری ممکن است در مناطق کم تراکم هموار شود. ما از یک فیلتر میانی پنجره تطبیقی مبتنی بر چگالی استفاده کردیم تا از صاف شدن بیش از حد جلوگیری کنیم. اندازه پنجره فیلتر به طور تطبیقی با توجه به تراکم نقاط مختلف در یک منطقه محلی با معادله (1) تغییر کرد:
جایی که دبلیوسمنzهاندازه پنجره فیلتر را نشان می دهد. دبلیوحداکثرحداکثر اندازه پنجره فیلتر را نشان می دهد و در اینجا روی 7 تنظیم شده است. پnتعداد نقاط در همسایگی شعاع را نشان می دهد. ن1و ن2دو مقدار فاصله ای از تعداد نقاط هستند و در آزمایش ها 10 و 15 تنظیم شدند. زضریب مقیاس را نشان می دهد و روی 2 تنظیم می شود. همانطور که در شکل 4 ب نشان داده شده است، مقادیر شدت نقاط علامت گذاری جاده صاف می شوند، در حالی که مقادیر شدت نقاط در لبه های علامت گذاری پس از هموارسازی باقی می مانند.
.
2.2.2. تشخیص محدودیت لبه نشانگر
خط کشی های جاده اغلب مقادیر شدت بازتابی بالاتری را نسبت به نقاط جاده نزدیک نشان می دهند زیرا از مواد سفید یا زرد ساخته شده اند. در گذشته، برخی از محققان از گرادیان شدت برای تشخیص لبه های علامت گذاری جاده از خطوط اسکن استفاده می کردند [ 18 ]. حتی اگر سطح جاده صاف شده است، هنوز نقاطی وجود دارد که به دلیل پیچیدگی داده های MLS چند پرتو، به طور کامل هموار نشده اند (نگاه کنید به #1 در شکل 4 ). ممکن است به اشتباه به عنوان نقاط لبه علامت گذاری جاده شناسایی شوند. برای تشخیص دقیق لبههای علامتگذاری جاده از خطوط شبه اسکن، یک روش آشکارساز محدودیت لبه نشانگر (MECD) را با ترکیب گرادیان شدت با هیستوگرام آماری شدت توسعه دادیم. گرادیان شدت نقاط با استفاده از رابطه (2) تخمین زده می شود:
جایی که جیمننشان دهنده گرادیان شدت است مننقطه در یک خط شبه اسکن. منمن-کو منمنمقادیر شدت را نشان می دهد (من-ک)هفتم و منبه ترتیب امتیاز. را کبه صورت تجربی روی 3 تنظیم شد.
از سمت چپ به سمت راست در امتداد یک خط شبه اسکن، لبه های دوتایی یک خط کشی جاده به این صورت تعریف می شود: لبه علامت گذاری که وارد خط کشی جاده می شود، لبه سمت چپ و لبه علامت گذاری که از آن خارج می شود، نامیده می شود. خط کشی جاده لبه سمت راست نامیده می شود. نقطه لبه سمت چپ، مانند نقطه #2 در شکل 4 ، یک نقطه علامت گذاری جاده است. گرادیان شدت آن یک مقدار مثبت است و مقدار شدت آن بیشتر از مقادیر شدت نقاط بدون علامت نزدیک آن است. نقطه لبه سمت راست، مانند نقطه 3 در شکل 4، یک نقطه بدون علامت است. گرادیان شدت آن یک مقدار منفی است و مقدار شدت آن کمتر از مقادیر شدت نقاط علامتگذاری جاده مجاور است. روش MECD به صورت معادله (3) فرموله شده است:
جایی که پهفتمو نهفتمیک آستانه گرادیان مثبت و یک آستانه گرادیان منفی را نشان می دهد. آنها بر اساس تفاوت شدت بین نقاط لبه علامت گذاری و نقاط جاده اطراف شناسایی می شوند. منهفتمیک آستانه شدت را نشان می دهد که حداقل مقدار شدت نقاط علامت گذاری جاده را نشان می دهد. در اکثر صحنه های جاده، نسبت خط کشی جاده در کل سطح جاده بسیار کم است. برای تخمین مقدار حداقل شدت، یک هیستوگرام آماری شدت بر اساس اطلاعات شدت سطح جاده هموار شده شمارش می شود. و یک مقدار شدت با نرخ پایین (یعنی مقدار در خط عمودی قرمز در شکل 4 ) به عنوان انتخاب شده است. منهفتم.
برای ساده سازی تشخیص دو لبه، روش MECD به صورت معادله (4) نرمال می شود.
که در آن نقاط لبه سمت چپ، نقاط لبه سمت راست و نقاط دیگر به ترتیب با مقادیر 1، -1 و 0 به صورت پرچم نرمال می شوند. در خطوط شبه اسکن، هر جفت نقطه لبه سمت چپ و نقطه لبه سمت راست، به ترتیب با یک جفت دریچه پرچم با 1 و -1 پس از نرمال سازی و نقاط بین هر جفت دریچه پرچم با 1 و – مطابقت دارند. 1 به عنوان نقاط علامت گذاری جاده استخراج می شوند.
2.3. اصلاح خط کشی جاده
برای از بین بردن نقاط بدون علامت گذاری که به خط کشی جاده متصل نمی شوند، یک فیلتر مبتنی بر تقسیم بندی اعمال شد. همه نقاط ابتدا با استفاده از خوشه بندی فاصله اقلیدسی به بخش های جداگانه گروه بندی شدند. یک بخش بدون علامت فقط می تواند به چند خط شبه اسکن تقسیم شود. اگر تعداد خط خطوط اسکن موجود در یک خوشه کمتر از آستانه شماره خط از پیش تعریف شده باشد. مهفتم، به طور خودکار توسط معادله (5) تخمین زده می شود، خوشه به عنوان نویز تعیین می شود و حذف می شود.
جایی که Lدقیقهنشان دهنده طول کوتاه ترین علامت گذاری جاده در مجموعه داده ها در امتداد جهت رانندگی است. دبلیوهفتمآستانه عرض تولید خط شبه اسکن ذکر شده در بخش 2.1 است . در بیشتر محیطهای جادهای، کوتاهترین علامتگذاری جاده، خط توقف به طول 0.2 متر است و بنابراین Lدقیقهمعمولاً روی 0.2 متر تنظیم می شود.
در یک محله شعاع، نقاط علامت گذاری واقعی به صورت یک صفحه دوبعدی در حالی که نقاط غیر علامت گذاری به صورت یک خط یک بعدی ساخته می شوند. یک فیلتر ابعادی پیشنهاد شده توسط لالوند و همکاران. [ 25 ] برای حذف آخرین نقاط بدون علامت گذاری باقی مانده اعمال می شود. یک نقطه به عنوان نویز تعیین می شود و در صورت خطی بودن آن، با توجه به مقادیر ویژه حذف می شود λ1،λ2،λ3از ماتریس کوواریانس، بزرگتر از یک آستانه خطی است Lهفتم. Lهفتممعمولاً روی 0.95 تنظیم می شود.
3. نتیجه
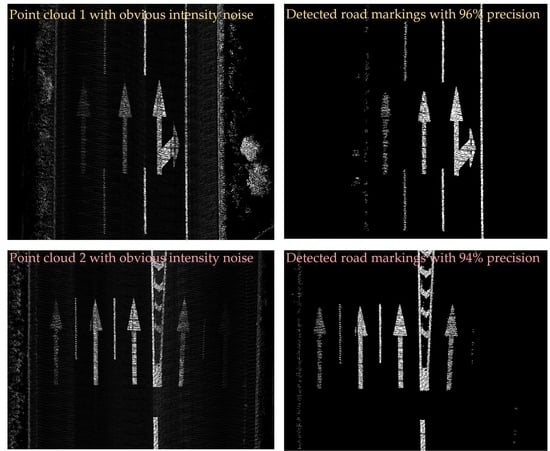
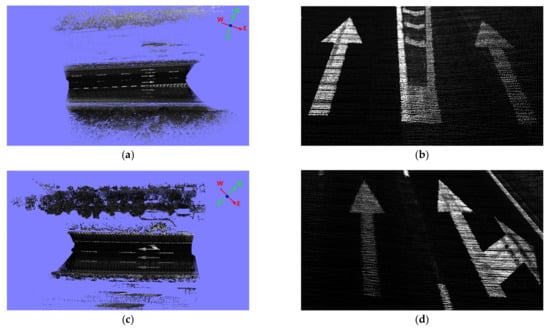
برای آزمایش عملکرد روش پیشنهادی، دو مجموعه داده بهدستآمده توسط یک سیستم MLS چند پرتو در آزمایشها استفاده شد. سیستم نصب شده شامل یک اسکنر لیزری ارزان قیمت Velodyne VLP-16، یک سیستم ناوبری یکپارچه (سیستم موقعیت یابی جهانی/واحد اندازه گیری اینرسی، GPS/IMU) و یک نشانگر اندازه گیری فاصله روی چرخ (DMI) بود. مجموعه داده ها در یک منطقه بزرگراه اسکن شدند. مجموعه داده I یک کانال زهکشی را در سمت راست مرز جاده ارائه می کند و جاده ای به طول 72 متر، 1.7 میلیون نقطه و تراکم 762 نقطه بر متر مربع را پوشش می دهد . مجموعه داده II محدودیتهای برجسته آشکار در مرز سطح جاده را ندارد و جادهای به طول 46 متر، 0.9 میلیون نقطه و تراکم 915 نقطه بر متر مربع را پوشش میدهد . همانطور که مشاهده می شود درشکل 5 ، شدت پالس لیزر منعکس شده در نقاط MLS چند پرتو بسیار ناسازگار بود و ابرهای نقطه به طور ناموزون بر روی سطح جاده توزیع میشوند.
3.1. تجزیه و تحلیل حساسیت پارامتر
آستانه گرادیان مثبت پهفتم، آستانه گرادیان منفی نهفتم، و آستانه شدت منهفتمدر روش MECD سه پارامتر کلیدی وجود دارد که آستانه های آنها با مقادیر متفاوت بر عملکرد روش پیشنهادی تاثیر می گذارد. دادههای MLS چند پرتو (یعنی مجموعه داده II) ابتدا با استفاده از مجموعهای از تنظیمات پارامتر برای نشان دادن روابط بین استخراج علامتگذاری جاده و آستانهها مورد آزمایش قرار گرفتند.
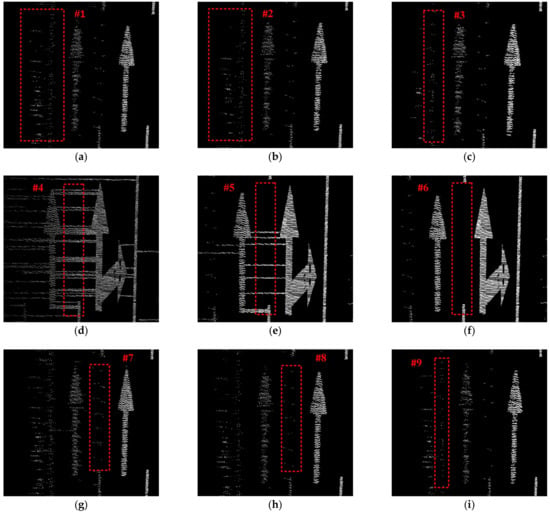
پهفتمحساسیت تشخیص لبه سمت چپ را با استفاده از روش MECD توصیف می کند. خط کشی های جاده استخراج شده با استفاده از پهفتمبا مقادیر مختلف در شکل 6 a-c نشان داده شده است. می توان مشاهده کرد که هر چه بزرگتر باشد پهفتمبود، نقاط بدون علامت کمتری استخراج شد (نگاه کنید به #1 و #2 در شکل 6 )، اما چند نقطه علامت گذاری جاده (نگاه کنید به #3 در شکل 6 ) از قلم افتادند. پهفتم= 6. برای اعتبارسنجی حساسیت نهفتمبرای تشخیص لبه سمت راست، ما عملکرد روش MECD را با مقادیر مختلف آزمایش کردیم نهفتمهمانطور که در شکل 6 d-f نشان داده شده است. از #4 تا #6 در شکل 6 نشان داده شده است که نقاط لبه سمت راست به تدریج به درستی شناسایی شدند. نهفتماز -6 به -2 افزایش یافت. منتیساعتبا مقادیر مختلف از هیستوگرام آماری شدت برای تایید حساسیت استخراج خط کشی جاده انتخاب شد. نتایج آزمون در شکل 6 g-i نشان داده شده است. مشاهده می شود که تعداد کمتری از نقاط بدون علامت (نگاه کنید به #7 و #8 در شکل 6 ) به اشتباه با یک بزرگتر استخراج شده است. منتیساعت، اما بسیاری از نقاط علامت گذاری جاده (نگاه کنید به #9 در شکل 6 ) از قلم افتاده است.
هر چه آستانه ها بالاتر باشد، دقت روش MECD بیشتر است. این به این دلیل است که این روش میتواند نقاط علامتگذاری جاده را با مقادیر با شدت بالا به عنوان نقاط لبه علامتگذاری به درستی شناسایی کند. با این حال، اگر خیلی بزرگ تنظیم شده باشند، ممکن است چند نقطه علامت گذاری جاده، به ویژه نقاط علامت گذاری با شدت کم در لبه های علامت گذاری، نادیده گرفته شوند. برای استخراج کامل خط کشی های جاده و سرکوب نویز، پارامترهای الگوریتم روش MECD مورد استفاده در آزمایش ها تنظیم شد. پهفتم= 2، نهفتم= -2 و منتیساعت= 10.
3.2. آزمایش
در سیستمهای مختصات محلی مبتنی بر خط شبه اسکن، فیلتر پنجره متحرک برای استخراج نقاط جاده اعمال شد. سطوح جاده استخراج شده از دو مجموعه داده در شکل 7 a,b نشان داده شده است. نقاط زرد نقاط جاده و نقاط سفید نقاط غیر جاده ای هستند. فیلتر قابل اعتماد است و می تواند سطوح جاده را به طور کامل استخراج کند. توجه داشته باشید که چهار بخش (نگاه کنید به #1، #2، #3، و #4 در شکل 7 ) در لبه های بیرونی داده های MLS چند پرتو وجود دارد . نقاط داخل بخش ها به طور مستقیم پس از انتخاب نقطه بذر حذف شدند زیرا نقاط بذر و نقاط علامت گذاری جاده وجود نداشتند.
روش MECD نقاط علامت گذاری جاده را با تشخیص هر جفت لبه دوتایی از خطوط شبه اسکن استخراج می کند. خط کشی های جاده استخراج شده از دو مجموعه داده در شکل 7 c,d نشان داده شده است، جایی که انواع مختلف علامت گذاری جاده ها، از جمله فلش ها، مستطیل ها، و خط کشی های جاده با موفقیت استخراج شدند. همانطور که مشاهده می شود، این روش توانست به طور کامل علائم جاده را از داده های MLS چند پرتو استخراج کند که اثربخشی و استحکام آن را برای استخراج خط کشی جاده به اثبات رساند. با این حال، ما چند نقص پیدا کردیم که در آنها برخی از نقاط خط کشی جاده، به ویژه خط کشی های جاده در سمت راست سطح جاده (نگاه کنید به شماره 5 در شکل 7)) از دست رفته بودند. این به این دلیل است که انرژی پالس لیزر با افزایش فاصله اسکن کاهش می یابد. آن خطکشیهای جادهای دور از اسکنر لیزری بودند و بنابراین، مقادیر شدت آنها بسیار کم و تقریباً برابر با نقاط جادهای نزدیک بود. بسیاری از نقاط بدون علامت گذاری (نگاه کنید به شماره 6 در شکل 7 ) به اشتباه از مرز جاده مجموعه داده II استخراج شدند زیرا مرز با علف های هرز انبوه پوشیده شده بود.
فیلتر مبتنی بر تقسیمبندی و فیلتر ابعادی برای حذف نقاط غیرعلامتگذاری در خطکشیهای جاده استخراجشده اعمال شد. فیلترها با شناسایی ویژگیهای فضایی بخشهای بدون علامتگذاری، نقاط بدون علامت را حذف کردند. نتایج پالایش در شکل 7 e,f نشان داده شده است. تقریباً تمام نقاط خطکشی غیر جادهای از خطکشیهای استخراجشده حذف شدند. نتایج نشان می دهد که روش پیشنهادی برای اصلاح خط کشی جاده موثر است. با این حال، بخشی از نویزها، مانند نقاط علامت گذاری غیر جاده ای در شماره 7 در شکل 7 ، حذف نشدند. این به این دلیل است که نقاط خطکشی غیر جادهای بهصورت پراکنده توزیع شدهاند و ویژگیهای فضایی نامنظم را نشان میدهند و در نتیجه حذف آنها به اندازه کافی دشوار است.
3.3. مطالعه تطبیقی
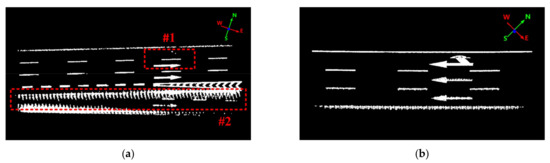
روش ما با روش موجود پیشنهاد شده توسط Yu [ 16 ] مقایسه شد. این دو روش هر دو مستقیماً علامتهای جاده را از ابرهای نقطه LiDAR موبایل استخراج میکنند، برخلاف روشهای مبتنی بر تصویر، که عادلانه بودن مقایسه را تضمین میکند. برای روش یو، سطح جاده به مجموعهای از بخشها تقسیم شد و سپس نقاط علامتگذاری جاده با استفاده از الگوریتم آستانه Otsu از هر بخش استخراج شد و نویز با استفاده از فیلتر چگالی فضایی حذف شد. خط کشی های جاده استخراج شده با روش Yu از سطح جاده دو مجموعه داده در شکل 8 نشان داده شده است .
همانطور که از نتایج مطالعه تطبیقی در شکل 7 e,f و شکل 8 مشاهده می شود ، روش یو بخش عمده ای از نقاط علامت گذاری جاده را از دست داد (به شماره 1 در شکل 8 مراجعه کنید )، به خصوص نقاط علامت گذاری جاده با مقادیر کم شدت در لبه های علامت گذاری. این به این دلیل است که مقادیر شدت این نقاط علامت گذاری کمتر از آستانه Otsu در بخش های مربوطه بود. علاوه بر این، نقاط بدون علامت بیشتری در خط خروج وجود داشت (#2 در شکل 8 را ببینید) در نتایج استخراج شده با روش یو. این به این دلیل است که شدت پالس لیزر منعکس شده نیز به سایش مواد بستگی دارد. خودروها فقط مجاز بودند با سرعت کم در لاین خروجی حرکت کنند. خط خروجی کمتر فرسوده بود و بنابراین، مقادیر شدت نقاط جاده نسبتاً بالاتر بود. نتایج استخراج شده با روش ما فقط دارای چند نقطه غیر علامت گذاری در همان مناطق بود.
برای ارزیابی کمی عملکرد دو روش، مجموعه دادههای مرجع (حقیقت) نقاط علامتگذاری جاده به صورت دستی با بازرسی بصری دو مجموعه داده برچسبگذاری شدند. فراخوان، دقت و شاخص ضریب همبستگی متیوز (MCC) شرح داده شده در رابطه (6) [ 26 ] استفاده شد.
جایی که تیپ، افن، و افپتعداد نقاط علامت گذاری جاده را که به درستی استخراج شده، شناسایی نشده و به اشتباه استخراج شده اند، نشان می دهد تیننشان دهنده تعداد نقاط بدون علامت گذاری به درستی شناسایی شده است.
نتایج ارزیابی های کمی در جدول 1 و جدول 2 ذکر شده است . مشاهده می شود که روش ما عملکرد بهتری را برای استخراج علامت گذاری جاده از نقاط MLS چند پرتو نشان می دهد. روش ما حدود 90 درصد میانگین یادآوری و حدود 95 درصد دقت متوسط را به دست می آورد، در حالی که روش یو به حدود 75 درصد میانگین یادآوری و حدود 82 درصد دقت متوسط دست می یابد. این به این دلیل است که شدت پالس لیزر منعکس شده در نقاط MLS چند پرتوی بسیار متناقض است و روش یو برای شناسایی نقاط علامت گذاری با مقادیر کم شدت در خط کشی جاده دشوار است. میانگین MCC روش ما حدود 15 درصد بیشتر از روش یو بود.
این دو روش در زبان برنامه نویسی C++ پیاده سازی شدند. پردازش بدون محاسبات موازی بر روی یک لپ تاپ شخصی معمولی با پردازنده مرکزی Intel Core i7-10510U با 8 گیگابایت رم انجام شد. زمان اجرای هر مرحله پردازش بر حسب ثانیه در جدول 3 آمده است . برای دو مجموعه داده، حدود 40٪ از کل زمان در استخراج علامت گذاری جاده صرف شد، زیرا فیلتر کردن میانگین شدت زمان بر بود. درخت kd برای ساختار همسایگی شعاع هر نقطه، حافظه زیادی هزینه می کرد. روش ما در مجموع حدود 3 ثانیه بود و کمی وقت گیر بود. با این حال، این را می توان با اسکن محاسباتی موازی خط به خط اسکن بهبود بخشید.
4. بحث
روشهای قبلی عمدتاً برای تشخیص علامتگذاری جاده از نقاط MLS تک پرتو طراحی شدهاند، در حالی که هدف روش پیشنهادی تشخیص دقیق نشانهگذاری جاده از نقاط MLS چند پرتو بود. علاوه بر این، روش ما، بر خلاف بسیاری از روش های گزارش شده در ادبیات [ 9 ، 12 ، 27 ، 28 ، 29 ]، به تبدیل ابرهای نقطه سه بعدی به تصاویر دو بعدی بستگی ندارد. بنابراین، از دست دادن دقت به طور موثر اجتناب شد.
نقاط به خطوط شبه اسکن عمود بر جهت رانندگی تقسیم شدند. بنابراین، روش ما با موفقیت این مشکل را حل کرد که تعداد ابرهای نقطهای که باید پردازش شوند به طور قابل توجهی کاهش مییابد و نقاط MLS چند پرتو نمیتوانند با استفاده از مهرهای زمانی [30] و میدان زاویه [18] در ساختار خط اسکن سازماندهی شوند .]. این ساختار همچنین برای پردازش موازی و بلادرنگ/آنلاین مناسب است. البته اندازه صحیح خطوط شبه اسکن باید برای داده های MLS مختلف با تراکم های مختلف تعیین شود. نقاط کافی را می توان در هر خط شبه اسکن با استفاده از یک آستانه عرض بزرگتر سازماندهی کرد، اما راندمان محاسبات ممکن است کاهش یابد. هنگام استفاده از آستانه عرض بسیار کوچک، سطح جاده ممکن است به طور کامل استخراج نشود.
فیلتر پنجره متحرک به طور دقیق سطح جاده را با تشخیص ویژگی های پرش بین مرزهای جاده و حاشیه ها استخراج می کند. فیلتر را می توان نه تنها روی سطح جاده با حاشیه، بلکه برای برخی از سطوح جاده بدون حاشیه نیز اعمال کرد. تمام نقاط داخل یک خط شبه اسکن به عنوان نقاط جاده در نظر گرفته می شوند و در صورتی که ویژگی های پرش در خط شبه اسکن شناسایی نشده باشند، استخراج می شوند. استخراج سطح جاده ممکن است توسط وسایل نقلیه روی سطح جاده تحت تأثیر قرار گیرد زیرا جهش ارتفاع بین وسیله نقلیه و سطح جاده ممکن است به اشتباه به عنوان مرز جاده تشخیص داده شود. برای کاهش تأثیر وسایل نقلیه، جمع آوری داده ها باید از ساعات شلوغی اجتناب شود.
روش ما برای استخراج علامتگذاری جاده از نقاط پر سر و صدا MLS کار کرد، که برای فناوری MLS که به طور گسترده در جمعآوری اطلاعات جاده استفاده میشود و توسعه رانندگی بدون سرنشین را ترویج میکند، مفید است. با این حال، روش MECD ممکن است برای استخراج خط کشی های جاده ای که به شدت فرسوده شده اند و خطوط اضطراری دقیق تر باشد، زیرا منهفتمانتخاب شده از هیستوگرام آماری شدت، یک آستانه بهینه جهانی است. محدودیت آستانه بهینه جهانی، جداسازی نقاط علامتگذاری جاده با شدتهای مشابه با نقاط جاده را از سطح جاده محلی دشوار میکند.
5. نتیجه گیری ها
بسیاری از روشهای موجود، علامتگذاری جادهها را از ابرهای نقطهای که توسط سیستمهای تک پرتو MLS با دقت بالا به دست میآیند استخراج میکنند. با این حال، سیستم های تک پرتو MLS گران هستند. هزینه بالا، فناوری MLS را از بکارگیری در جمع آوری اطلاعات جاده در مقیاس بزرگ محدود می کند. در این مقاله، ما یک روش دقیق برای استخراج مستقیم علائم جاده از دادههای اسکن سیستم چند پرتوی کمهزینه ارائه کردیم. روش پیشنهادی یک فیلتر نقطه غیر جاده ای را برای حذف بیشتر نقاط غیر جاده ای اعمال کرد و سپس نقاط باقی مانده به خطوط شبه اسکن مختلف تقسیم شدند و به سیستم های مختصات محلی مبتنی بر خط شبه اسکن مربوطه تبدیل شدند. برای استخراج سطح جاده و کاهش بیشتر تعداد نقاط، از یک فیلتر پنجره متحرک گسترده استفاده شد. یک فیلتر میانی پنجره تطبیقی مبتنی بر تراکم برای صاف کردن اطلاعات شدت سطح جاده اعمال شد. روش MECD برای استخراج علائم جاده از طریق تشخیص هر جفت نقطه لبه سمت چپ و نقطه لبه سمت راست از هر خط شبه اسکن استفاده شد. خطکشیهای جادهای استخراجشده توسط یک فیلتر مبتنی بر تقسیمبندی و یک فیلتر ابعادی برای حذف نقاط غیرعلامتگذاری، اصلاح شدند. ارزیابی کمی نشان داد که روش پیشنهادی به ترتیب میانگین یادآوری، دقت و MCC به ترتیب 90، 95، و 92 درصد برای تشخیص علامتگذاری جاده از ابرهای نقطه اسکن چند پرتو به دست آورد. خط کشی های جاده استخراج شده را می توان برای تهیه نقشه های با دقت بالا مدل سازی کرد. خطکشیهای جادهای روی نقشههای با دقت بالا نه تنها توسط بخشهای مدیریت ترافیک برای هدایت فعالیتهای ترافیکی استفاده میشوند، بلکه دستورالعملهای دقیقی را برای ناوبری وسایل نقلیه خودران ارائه میدهند. کار آینده بر کاربرد ترکیبی روش ما با روشهای یادگیری عمیق برای طبقهبندی علامتگذاری جادهها و تشخیص محیطی بلادرنگ متمرکز خواهد بود.






بدون دیدگاه