1. مقدمه
مستندات هندسی میراث فرهنگی به عنوان پیشزمینه لازم برای کلیه مطالعات باستانشناسی و معماری برای مرمت آثار و اشیاء میراث فرهنگی، طبق منشور ونیز در دسترس است: https://www.icomos.org/charters/venice_e.pdf . (دسترسی در 3 آوریل 2021). تا به امروز، این کار از طریق تولید نقشههای برداری سنتی دو بعدی انجام میشود و تخمین زده میشود که این طرحها به زودی جایگزین نشوند. ایجاد چنین نقشه های خطی برای یک مهندس فرآیندی زمان بر است زیرا به صورت دستی انجام می شود.
مراحل و ملاحظات اساسی برای مستندسازی هندسی موفق یک شی میراث فرهنگی به شرح زیر است. در درجه اول درک عمیق این بنا و در نظر گرفتن تمام داده های تاریخی و باستان شناسی مربوط به آن است. این امر مستلزم مطالعه صحیح و درک عمیق و تفسیر شیء به ویژه ساختار و مراحل ساخت آن در طول تاریخ آن است. این یک واقعیت حیاتی است که یک مهندس باید قبل از هر اقدامی برای جمعآوری داده در نظر بگیرد، زیرا این عناصر باید در محصولات مستندسازی منعکس شوند. این مطالعه باید مقدم بر همه برنامهها و اقدامات دیگر باشد، باید در محل و با همکاری کارشناسان با دانش عمیق از بنای تاریخی – ترجیحاً استفادهکنندگان نهایی – انجام شود. این شناسایی باید تمام جزئیات مربوط به سطح جزئیات (LoD)، دقت، شکل محصولات نهایی و – از اهمیت بسیار بالایی – نیازهای کاربران. در نهایی کردن محصولات تحویلی، به عنوان مثال، نقشه های مستندات کلی، نقشه های جزئیات و تجسم های سه بعدی، در نهایت مشخصات کلی موجود باید با نیازهای خاص شی منطبق شود. متأسفانه چنین مشخصات کلی به ندرت وجود دارد و در نتیجه هر بنای تاریخی باید با مشخصات خاص خود مستند شود. این نیازی است که باید در آینده برطرف شود. و در نتیجه هر بنای تاریخی باید با مشخصات خاص خود مستندسازی شود. این نیازی است که باید در آینده برطرف شود. و در نتیجه هر بنای تاریخی باید با مشخصات خاص خود مستندسازی شود. این نیازی است که باید در آینده برطرف شود.
در سالهای اخیر، اتوماسیون امکان دستیابی سریع حجم زیادی از دادههای دیجیتالی را برای مستندسازی اشیاء میراث فرهنگی، خواه غیرمنقول یا متحرک، بزرگ یا کوچک، فراهم کرده است. این داده ها با دقت و قابلیت اطمینان بالا مشخص می شوند و امکانات زیادی را برای مستندسازی کامل اشیاء میراث فرهنگی در اختیار کارشناسان قرار می دهند. با این حال، پردازش داده های به دست آمده نیاز به تخصص، نرم افزار تخصصی، سخت افزار قدرتمند و از همه مهمتر زمان دارد. به طور متوسط، نسبت زمان پردازش مورد نیاز به زمان مورد نیاز برای کسب داده ها 15:1 است، بر اساس تجربه گسترده ما با بناهای معماری پیچیده که سطح بالایی از جزئیات را ارائه می دهند و نیاز به بررسی های بزرگ دارند.
نیاز به بهینه سازی و اتوماسیون فرآیندهای فوق اغلب با استفاده از استخراج خودکار ویژگی ها در ابرهای نقطه سه بعدی انجام شده است، یک موضوع تحقیقاتی جدید در زمینه های تحلیل تصویر، پردازش تصویر و بینایی کامپیوتری که در سال های اخیر مورد مطالعه قرار گرفته است [ 1 ، 2 ]. , 3 , 4 , 5 ]. با این حال، رویکردهای مختلف به اندازه کافی برای رسیدن به یک راه حل جامع، که مدت هاست یک مسئله اصلی در برنامه های مدل سازی سه بعدی بوده، کافی نیستند. به طور کلی، در زمینه استخراج لبه های تصویر، لبه ها بر اساس مرز بین مناطق با روشنایی یا بافت متفاوت تشخیص داده می شوند [ 6 ، 7 ، 8 ]]. با این حال، روشهای مورد استفاده برای تشخیص لبهها در تصاویر را نمیتوان برای ابرهای نقطهای سهبعدی سازمانیافته اعمال کرد، زیرا بدیهی است که آنها ساختار متفاوتی با تصاویر دارند، زیرا یک تصویر ماتریسی از عناصر (i, j) است، در حالی که یک ابر نقطه سازمانیافته نیست. مجموعه ای از داده ها که به طور نامنظم توزیع شده اند [ 2 ، 9 ]. این تنوع در ساختار آنها منجر به نامناسب بودن روشهای تشخیص لبه مورد استفاده در تصاویر میشود و نشاندهنده ظهور تشخیص لبه و استخراج از ابرهای نقطهای سازمانیافته به عنوان یک موضوع تحقیقاتی مهم است [ 2 ، 3 ، 10 ].
برای پرداختن به وظایف ذکر شده در بالا، یک روش خودکار و موثر برای تشخیص لبهها در ابرهای نقطه سه بعدی سازمانیافته، با بهرهبرداری از رابطه تصاویر دیجیتالی جهتیافته، ایجاد و پیشنهاد میشود، بنابراین مختصات تصویر دوبعدی و فضای سهبعدی را به هم متصل میکند. این نرم افزار در محیط های Jupyter و Spyder با استفاده از کتابخانه های متن باز مختلف توسعه یافته است. زبان برنامه نویسی پایتون است که یک محیط برنامه نویسی متن باز است.
یک لبه مورد نظر از جسم روی یک تصویر شناسایی شده و به الگوریتم وارد می شود. صفحه ای که لبه مورد نظر به آن تعلق دارد با استفاده از ویژگی های هندسه تحلیلی و پروجکتیو ایجاد می شود. هدف انتخاب نقاطی از ابر نقطه سه بعدی است که به لبه خاصی در شی تعلق دارند. این با جستجوی تمام لبه هایی که به آن صفحه شناسایی شده تعلق دارند، به دست می آید که برای سیستم مرجع فضا و تصویر مشترک است. تشخیص لبه سه بعدی مورد نظر در نهایت با اعمال الگوریتم RANSAC و معیارهای پذیرش کافی انجام می شود. الگوریتم و فرآیند در یک آزمایش شبیهسازی و در یک مطالعه موردی واقعی پیادهسازی شد و در نهایت از نظر عملکرد آنها مورد ارزیابی قرار گرفت. سازگاری روش در موارد تصاویر زمینی و هوایی برای اثربخشی کلی الگوریتم مورد انتظار است. نتیجه گیری بر دقت تشخیص لبه ها و موانعی که الگوریتم ممکن است در فرآیند انتخاب لبه مناسب با آن مواجه شود، تمرکز دارد.
بقیه مقاله به شرح زیر سازماندهی شده است: بخش 2 مروری بر وضعیت روش های هنری برای تشخیص لبه در ابرهای نقطه سه بعدی را معرفی می کند. بخش 3 مبانی روش توسعه یافته را با اشاره به مفاهیم اولیه هندسه تحلیلی و فتوگرامتری تشریح می کند. بخش 4 روش و الگوریتم پیشنهادی ما و توسعه آن را ارائه می دهد. در بخش 5 پیاده سازی بر روی یک مجموعه داده موجود و تنظیم دقیق لازم ارائه شده است. در حالی که در بخش 6 اعمال معیارهای پذیرش خاص اجرا و ارزیابی می شود. در نهایت، در بخش 7 برخی از نتیجهگیریها استخراج شده و کارهای آتی پیشبینی میشود.
2. برداری ابرهای نقطه ای
روشهای تشخیص لبه رضایتبخش نیستند و الگوریتمهای تشخیص آنها نه بهطور خودکار کار میکنند و نه نتایج قوی ارائه میدهند. در همان زمان، با پیشرفت در فناوری اسکن لیزری هوایی و زمینی، و همچنین در نرم افزار مدل سازی مبتنی بر تصویر، دستیابی به ابرهای نقطه متراکم به طور فزاینده ای رایج شده است [ 11 ، 12 ]]. ابرهای نقطه سه بعدی با استفاده از اسکنرهای لیزری زمینی یا حسگرهای LiDAR و با اجرای روش های SfM/MVS با تصاویر زمینی یا تصاویر گرفته شده توسط پهپاد یا سایر حسگرهای هوابرد تولید می شوند. تلاشهای محققان برای تشخیص لبهها در آن ابرهای نقطه سهبعدی را میتوان به دو گروه – روشهای مستقیم و غیرمستقیم – بسته به روش استخراج لبههای سه بعدی مورد نظر طبقهبندی کرد. روشهای مستقیم، نقاط متعلق به شی مورد نظر را به عنوان مناطقی با ویژگیهای واضح متقابل شناسایی میکنند، با استفاده از دادههای مرتبسازی از طریق خود ابر نقطه و دستهبندی آن به خوشهها. در مقابل، روشهای غیرمستقیم ابتدا ابر نقطه سهبعدی را به یک تصویر تبدیل میکنند، سپس لبههای دو بعدی انتخاب شده به ابر نقطه سهبعدی بازتاب میشوند. در دسته اول،13 ، 14 ، 15 ] یا روش های هندسی [ 16 ، 17 ، 18 ]، یا با تخمین نرمال ها در لبه های تیز [ 19 ، 20 ، 21 ، 22 ]. استخراج لبههای سهبعدی بر اساس چگالی و انبوه، یعنی اندازه، ابر نقطه سهبعدی، و همچنین موضوع مورد توجه است. در شبکههای نامنظم مثلثی، لبهها در مرزهای خارجی یا داخلی خود بهعنوان خطوط اصلی لبههای بزرگتر ظاهر میشوند [ 10 ].
برخی از رویکردها از مدلهای سطحی دادههای نقطهای استفاده میکنند، به دلیل توانایی آنها در تشخیص لبههای ویژگیهای متقابل. این رویکردها برای اشیاء نامنظم یا سطوح پیچیده استفاده می شود. وبر و همکاران [ 19 ، 20 ، 21 ] از مثلث سازی برای تخمین عادی با تجزیه و تحلیل نقاط محصور در همسایگی های مختلف استفاده کردند. تکنیکهای مختلف از الگوریتمهایی برای تشخیص خطوط روی اجسام با احساس تغییرات در انحنای عناصر اطراف برای مقابله با خطوط پیچیده استفاده میکنند. بنابراین، نقاطی که نزدیکترین نقطه به تغییر انحنای لبهها هستند، انتخاب شده و نقاط کانتور در نظر گرفته میشوند. روش های اشاره به شکاف زاویه ای [ 18] همراه با Point Cloud Library (PCL) پیشنهاد و تولید شده است. ویژگی ذاتی یک یال در اینجا بر اساس ویژگی های هندسی همسایگی هر نقطه پرس و جو است و نه خود نقطه.
بر اساس این اصل، نی و همکاران. [ 17 ] الگوریتم AGPN را ارائه می دهد، روشی خودکار که بر روی اشیاء پیچیده دست ساز و صحنه های شهری در مقیاس بزرگ اعتبارسنجی شده است که شامل تشخیص لبه های سه بعدی و سپس ردیابی خطوط ویژگی است. در همسایگی یک عنصر مرزی، تنها یک منحنی یا سطح صاف وجود دارد. نزدیک به یک لبه تاشو، دو یا چند سطح متقاطع وجود دارد. سپس AGPN اجماع نمونه تصادفی (RANSAC) [ 17 ، 23 ] و متریک شکاف زاویه ای را برای تشخیص لبه ها ترکیب می کند. در مرحله ردیابی خط ویژگی، خطوط ویژگی با یک روش ترکیبی بر اساس رشد منطقه و برازش مدل در لبههای شناسایی شده ردیابی میشوند. پیشگامان این اصل، باززیان و همکاران. [ 10]، از یک روش خوشهبندی برای استخراج یال با تحلیل مقادیر ویژه ماتریس کوواریانس که توسط k نزدیکترین همسایههای هر نقطه تعریف میشوند، استفاده کرد. Hackel و همکاران، در سال 2016 [ 24 ]، به اهمیت تشخیص لبه هایی که جهت آنها به طور ناگهانی تغییر می کند با استفاده از دو طبقه بندی کننده باینری برای هر نقطه در ابتدا و سپس برای منطقه انتخاب شده از نقاط (میدان تصادفی مارکوف) اشاره کردند.
روش جالبی توسط یانگ و فورستنر [ 16 ] بر اساس ویژگی های هندسی صفحات سه بعدی با تقسیم ابر نقطه ای به بلوک های مستطیلی کوچک ارائه شد تا تأیید شود که در هر مربع حداکثر سه صفحه وجود دارد. این الگوریتم RANSAC را برای تشخیص صفحه و جستجوی اصل MDL برای صفحات مختلف هر بلوک ادغام میکند، بنابراین از یک ضربکننده فضایی برای اتصال تمام صفحات همسایه متعلق به محدوده محلی خاصی از مقادیر استفاده میکند.
گروه دیگری از روشها برای تشخیص لبه بر اساس روشهای تقسیمبندی یا طبقهبندی است که گاهی اوقات توسط الگوریتمهای یادگیری ماشین پشتیبانی میشود. گریلی و همکاران [ 25 ] مروری بر روشهای تقسیمبندی ابر نقطهای با کمک الگوریتمهای یادگیری ماشین ارائه کرد. بررسی به طور کامل جامع نیست، اما بسیاری از رویکردهای مناسب برای جوامع جغرافیایی و میراث را گزارش می کند. همه روش ها بر اساس رویکرد اصلی خود به پنج دسته دسته بندی می شوند. بن-شبات و همکاران. [ 23] یک الگوریتم جدید تقسیم بندی بیش از حد مبتنی بر نمودار را برای ابرهای نقطه سه بعدی معرفی کرد. الگوریتم Point Cloud Local Variation (PCLV) آنها عمومی است به این معنا که مستقل از حسگر است و ممکن است برای هر داده ابر نقطه سه بعدی اعمال شود. با این حال، به استخراج لبه مناسب برای پیش بینی های متعامد منجر نمی شود و دقت لازم را ارائه نمی دهد، زیرا ابرهای نقطه نسبتاً پراکنده را پردازش می کند. هو و همکاران [ 26 ] یک بسته نرم افزاری منبع باز (JSENET) ارائه کرد که تشخیص لبه را بر اساس تقسیم بندی ابر نقطه انجام می دهد، در حالی که لبه ها را استخراج نمی کند و از تصاویر دیجیتال استفاده نمی کند.
3. روش شناسی
انگیزه الگوریتم پیشنهادی توسعه یک راه حل خودکار برای بردارسازی لبه مستقیم از ابرهای نقطه سه بعدی، با بهرهبرداری از ترکیب پسزمینه شناختی هندسه تحلیلی و فتوگرامتری است. همانطور که قبلاً بحث شد، اکثر روشهای تشخیص لبه، لبههای دوبعدی و سهبعدی را بهعنوان ناپیوستگی ویژگیهای هندسی در صحنه سهبعدی زیرین تعریف میکنند و اغلب با تغییرات ناگهانی در سطوح خاکستری روی تصاویر مرتبط هستند.
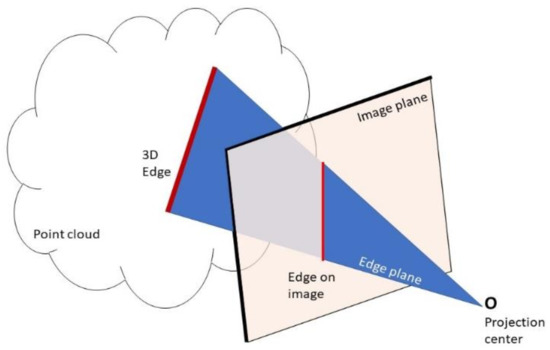
این تحقیق سعی دارد از صفحه سه بعدی تعریف شده توسط یک لبه شناسایی شده در تصویر و مرکز چشم انداز آن بهره برداری کند ( شکل 1 ). به شرطی که جهت بیرونی تصویر مشخص باشد و یک ابر نقطه ای که در همان سیستم مختصات ارجاع داده شده باشد وجود داشته باشد، نقاط لبه سه بعدی باید در آن صفحه قرار گیرند. در نتیجه، هر خط سه بعدی در ابر نقطه یک صفحه سه بعدی ایجاد می کند که می تواند با استفاده از حداقل دو نقطه مختلف متعلق به لبه سه بعدی و مختصات فضای سه بعدی مرکز پرتاب کننده به دقت تعیین شود. بدیهی است که این صفحه از لبه تشکیل شده روی تصویر عبور می کند.
پارامترهای لازم برای تعریف آن صفحه عبارتند از لبه روی تصویر، از یک سو، و پارامترهای جهت گیری بیرونی دوربین، که شامل موقعیت مرکز پرسپکتیو O (Xo، Yo، Zo) و جهت محور آن است. (ω، φ، κ)، از سوی دیگر. علاوه بر این، پارامترهای ذاتی دوربین نیز باید برای افزایش قابلیت اطمینان در تعریف صفحه شناخته شوند. این پارامترها حداقل شامل فاصله کانونی مدرج c، مختصات نقطه اصلی (x o , y o ) و مقادیر اعوجاج شعاعی هستند. در اکثر کاربردهای فتوگرامتری، پارامترهایی که هندسه دوربین مورد استفاده را توصیف می کنند، معمولاً شناخته شده هستند. شناسایی دو سیستم مرجع تصویر و فضا و ارتباط آنها تا حد امکان ضروری است.
باید به خاطر داشت که طبق مفاهیم اولیه هندسه تحلیلی، یک صفحه یا (i) با سه نقطه غیر خطی یا (ii) توسط یک نقطه روی صفحه و بردار نرمال به آن تعریف می شود. معادله کلی یک صفحه در یک سیستم مختصات دکارتی مستطیلی شکل زیر است:
که در آن A، B، C و D پارامترهای مناسبی هستند. دو صفحه ε 1 A 1 x + B 1 y + C 1 z + D 1 = 0 و ε 2 A 2 x + B 2 y + C 2 z + D 2 = 0 یکسان هستند اگر:
ایده اصلی الگوریتم پیشنهادی در مراحل زیر توضیح داده شده است که بعداً توضیح داده خواهد شد:
-
ابتدا یک تصویر (یا تصاویر) از یک شی به الگوریتم معرفی می شود. تصویر به عنوان ماتریسی از مقادیر پیکسل (r, c) تعریف می شود و مبدا مختصات تصویر (0,0) نقطه اصلی است.
-
سپس لبه مورد نظر روی تصویر تشخیص داده می شود. این ممکن است به صورت دستی یا با یکی از الگوریتم های متعدد تشخیص لبه موجود انجام شود. تعیین لبه باید با دقت بهینه انجام شود تا به طور قابل اعتماد صفحه ایجاد شده توسط لبه دو بعدی و مرکز تصویر در فضای سه بعدی با مختصات آن (Xo، Yo، Zo) مشخص شود.
-
در نهایت، اتصال تصویر و سیستم های مرجع فضای سه بعدی به یک سیستم مشترک یک گام اساسی برای الگوریتم توسعه یافته است. برای این منظور، یک تبدیل جسم صلب بر اساس عناصر جهت بیرونی تصویر اعمال می شود. به این ترتیب مختصات تصویر در سیستم مختصات سه بعدی ارجاع می شود و بنابراین صفحه تعریف شده توسط لبه دو بعدی و مرکز پرسپکتیو در فضای سه بعدی تعریف می شود. خاطرنشان می شود که ابر نقطه موجود نیز در همان سیستم سه بعدی ارجاع داده شده است.
-
نقاط سه بعدی لبه، طبق تعریف، روی این صفحه قرار دارند. باقی مانده است که الگوریتم آن نقاط را در ابر نقطه سه بعدی جستجو کند ( شکل 1 ). برای آن، چندین معیار برای اطمینان از تعیین قابل اعتماد لبه سه بعدی در ابر نقطه اعمال می شود. این معیارها در بخش های بعدی مورد بحث قرار می گیرند.
تعیین صفحه به صورت زیر انجام می شود: حداقل دو نقطه در لبه تصویر انتخاب می شوند، به عنوان مثال، p 1 ( x 1 , y 1 , – c ) و p 2 ( x 2 , y 2 , – c ) و معادله خط را می توان تعیین کرد. این مختصات با کمک پارامترهای جهت گیری بیرونی تصویر به سیستم مختصات فضایی، یعنی ابر نقطه ای تبدیل می شوند (معادله (3)). این تبدیل به P 1 ( X 1 , Y 1 , Z 1 ) و P منجر می شود2 ( X 2 , Y 2 , Z 2 )، دو نقطه در سیستم مختصات فضا که مرکز پرسپکتیو O ( X o , Y o , Z o ) نیز مشخص است. آن سه امتیاز (P 1 ، P 2و O) صفحه ای را تشکیل می دهند که عمیقاً لبه مورد نظر را در بر می گیرد. از این سه نقطه می توان چهار پارامتر هواپیما را تعیین کرد. تمام نقاط ابر نقطه ای که معادله پارامتری (معادله (1)) صفحه تعیین شده را برآورده می کنند متعلق به این صفحه هستند. از طرف دیگر، تمام نقاط ابر نقطه با فاصله اقلیدسی از صفحه کوچکتر از یک آستانه از پیش تعیین شده، متعلق به صفحه هستند. در این مرحله، تمام نقاط پرت با استفاده از الگوریتم RANSAC رد می شوند و تمام نقاطی که به صفحه تعلق دارند، از جمله نقاط لبه مورد نظر، انتخاب می شوند. سپس الگوریتم نقاط متعلق به لبه را از درونی های صفحه شناسایی شده انتخاب می کند.
تبدیل بدنه صلب این امکان را فراهم می کند که بردارهای تصویر را با بردارهای فضای سه بعدی متصل کنیم، به عنوان مثال، نقاط تصویر ( x ، y ، – c ) با نقاط ( X ، Y ، Z ) لبه انتخاب شده در ارتباط هستند. سیستم جهانی مختصات با توجه به چرخش و موقعیت مرکز پرتاب کننده در زمان گرفتن تصویر تغییر مییابند و از پارامترهای جهتگیری بیرونی شناخته شده تصویر استفاده میکنند. این تبدیل با معادله (3) فرموله شده است.
که در آن ( x , y , – c ) مختصات نقاط تصویر در سیستم تصویر هستند، R (ω، φ، κ) ماتریس چرخش تصویر و ( Xo ، Yo ، Z o ) مختصات جهان است . مرکز چشم انداز پس از اجرای این تبدیل، صفحه تعریف شده توسط لبه روی تصویر و مرکز پرسپکتیو با صفحه تعریف شده توسط مرکز پرسپکتیو و لبه در ابر نقطه منطبق است ( شکل 1 ).
4. توسعه و پیاده سازی الگوریتم
هر مرحله از الگوریتم توسعهیافته در ابتدا برای قابلیت اطمینان آن با ایجاد یک شبیهسازی نماینده با استفاده از دادههای ایجاد شده مصنوعی مورد بررسی قرار گرفت. در شکل 2 ، توالی مراحل الگوریتم در قالب فلوچارت ارائه شده است.
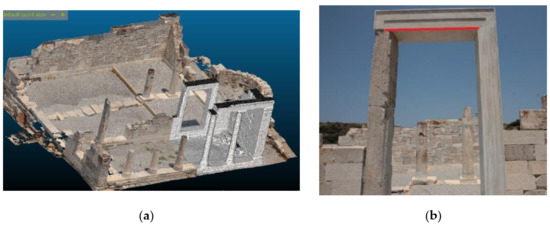
این مراحل هم در یک شبیه سازی با دقت طراحی شده ایجاد شده برای اثبات استحکام الگوریتم و هم در یک کاربرد عملی نهایی در معبد دمتر در جزیره ناکسوس اعمال شد ( شکل 3 ).
دادههای مصنوعی برای شبیهسازی با استفاده از چند، تقریباً 1000 نقطه، بهطور تصادفی تعیینشده برای ساختن یک ابر نقطهای ایجاد شد که در آن لبهای با 200 نقطه وجود داشت. تمام نقاط بر روی یک تصویر با یک دوربین شبیه سازی شده با پارامترهای درونی و بیرونی شناخته شده، به تصویر کشیده شدند. برای این کار از کتابخانه های تصادفی پایتون استفاده شد. داده های دنیای واقعی شامل یک ابر نقطه ای متشکل از 750000 نقطه، بخشی از ابر نقطه رنده شده با اسکنر لیزری زمینی فارو برای مستندات هندسی معبد دمتر در ناکسوس بود. ابر نقطه ای استفاده شده قسمت جلوی معبد را همانطور که در شکل 3 نشان داده شده است به تصویر می کشد. تمام تصاویر به دست آمده برای مستندات هندسی معبد دمتر از طریق یک روش SfM/MVS با استفاده از نرم افزار Agisoft Photoscan v.1.4 جهت یابی شدند.
الگوریتم با وارد کردن لبه دوبعدی از یک تصویر شروع میشود که جسم یا بخشی از آن را به تصویر میکشد، که همچنین توسط ابر نقطه سه بعدی موجود نشان داده میشود. سپس، تبدیل جسم صلب که در بالا توضیح داده شد، با در نظر گرفتن مختصات تصویر نقطه اصلی و جهت بیرونی تصویر، به عنوان مثال، موقعیت مرکز پرتاب کننده آن و جهت گیری محور آن در فضای سه بعدی مشابه ابر نقطه موجود اعمال می شود. پس از آن تبدیل، نقاط روی تصویر، مرکز پرسپکتیو و ابر نقطه در یک سیستم مرجع قرار دارند. در نتیجه، صفحه ای که توسط نقاط روی تصویر و مرکز پرسپکتیو تعریف می شود، البته شامل نقاط سه بعدی لبه از ابر نقطه است. تعیین دقیق این هواپیما بسیار مهم است، همانطور که توسط یک بخش بسیار کوچک، که در فضای تصویر موجود است، تعریف شده است. برای تعیین نقاط ابر نقطه ای که متعلق به آن صفحه هستند، الگوریتم RANSAC پیاده سازی شده است.
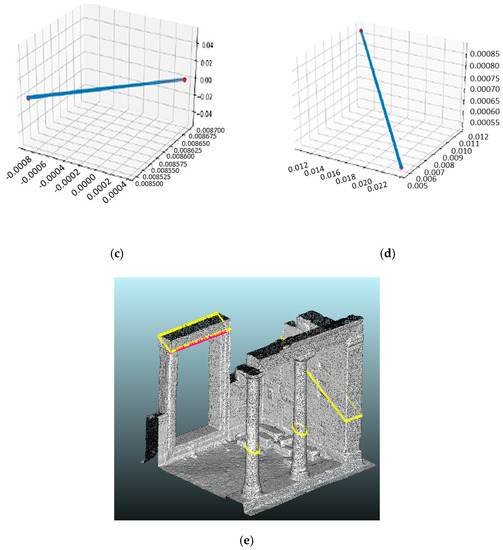
RANSAC اشکال را با رسم تصادفی حداقل مجموعه ها از داده های نقطه ای و با ساختن شکل های اولیه مربوطه استخراج می کند. مجموعههای نامزد به دست آمده با تمام نقاط مجموعه داده مقایسه میشوند تا مشخص شود که چه تعداد از نقاط، که inliers نامیده میشوند، به خوبی توسط اولیه تقریب میشوند، بنابراین امتیاز بیشتری از مجموعه را تشکیل میدهند. پس از تعداد معینی آزمایش، مجموعه ای که تقریباً بیشترین نقاط را دارد استخراج می شود و الگوریتم با داده های باقی مانده ادامه می یابد [ 27 ]. نتایج این روش عملیاتی در شکل 4 برای شبیه سازی و در شکل 5 برای داده های دنیای واقعی که منجر به تعیین لبه سه بعدی در ابر نقطه می شود، ارائه شده است. در شکل 4الف، ابر نقطه سه بعدی اصلی نمایش داده می شود، در حالی که در شکل 4 ب همان ابر نقطه ای نشان داده شده است که روی تصویر نشان داده شده است. در شکل 4 c، ابر نقطه حاصل متعلق به صفحه تعیین شده پس از تبدیل جسم صلب به تصویر کشیده شده است. علاوه بر این، شکل 4 d تفکیک لبه 2 بعدی را نشان می دهد که به تصویر درج شده تعلق دارد، در حالی که شکل 4 d لبه 3 بعدی تبدیل شده را در فضای سه بعدی نشان می دهد. در نهایت، در شکل 4 e، نتیجه اجرای الگوریتم RANSAC به لبه تبدیل شده، با تمام موارد درونی متعلق به لبه درخواستی ابر نقطه سه بعدی، نمایش داده شده است.
با این حال، مراحل مربوطه انجام شده با استفاده از داده های واقعی از معبد دمتر در ناکسوس، همانطور که در شکل 5 نشان داده شده است ، منجر به جمع بندی نقاط متعلق به صفحه تعیین شده می شود، اگرچه آنها لزوماً فقط به لبه 3 بعدی مورد نظر در فضا تعلق ندارند. . این اختلاف در بخش دوم الگوریتم بررسی میشود، جایی که معیارهای پذیرش مختلف اجرا میشوند. آستانه استفاده شده در الگوریتم RANSAC برای آن قسمت از الگوریتم به چگالی و دقت ابر نقطه سه بعدی بستگی دارد و توسط کاربر تعیین می شود.
در شکل 5 الف، بخشی از ابر نقطه اکتسابی معبد دمتر که از 750000 نقطه تشکیل شده است نشان داده شده است. در شکل 5 ب، لبه دو بعدی انتخاب شده در یکی از تصاویر موجود به تصویر کشیده شده است. این لبه در سیستم جهانی ابر نقطه جستجو خواهد شد. در شکل 5 ج، تعریف پارامترهای خط دو بعدی و کسب دو نقطه مشخصه لبه نمایش داده شده است. در شکل 5 d، نتیجه اجرای تبدیل جسم صلب برای آن لبه نشان داده شده است. در نهایت، شکل 5 e بخشی از ابر نقطه را با صفحه تعیین شده نشان می دهد که با رنگ های مختلف تمام نقاط متعلق به آن صفحه را نشان می دهد.
5. تشخیص لبه سه بعدی
بخش دوم الگوریتم معیارهای خاصی را برای انتخاب لبه سمت راست در میان بسیاری از غلظت های خطی نقاط تعیین شده تا کنون در ابر نقطه سه بعدی اعمال می کند ( شکل 5 e). معیارهای پذیرش اعمال شده بر روی لبه های شناسایی شده برای عملکرد صاف الگوریتم ضروری هستند و به شرح زیر هستند:
-
هر لبه بررسی شده، زمانی که بر روی تصویر نمایش داده می شود، باید در کادر فیزیکی خود قرار گیرد، در این مورد در ناحیه 36 × 24 سانتی متر مربع ، زیرا تصاویر استفاده شده با یک DSLR فول فریم گرفته شده اند. اگر این معتبر نباشد، لبه رد می شود.
-
تمام بخشهای لبههای رد نشده که خارج از کادر تصویر قرار میگیرند باید حذف شوند.
-
هر لبه پیشبینیشده و پذیرفتهشده باید دارای جهتگیری (مایل) مشابه، یعنی در یک مقدار آستانه، با لبه تعیینشده اولیه روی تصویر باشد. اگر اینطور نباشد، لبه رد می شود.
-
لبهای که باید انتخاب شود باید نزدیکترین لبه به مرکز تصویر باشد، همانطور که در زمان گرفتن تصویر بود.
یک مثال در شکل 6 نشان داده شده است ، که تمام لبه های موجود در صفحه تعیین شده را نشان می دهد ( شکل 5 e). از هشت یال مختلف متعلق به صفحه درخواستی همانطور که در قسمت اول الگوریتم یافت شد، فقط شماره 1 صحیح است. پیاده سازی الگوریتم RANSAC دوباره از محدودیت های مناسب برای به دست آوردن آن لبه و حذف تمام لبه های اضافی استفاده می کند (#2-8). خطوط زرد نشان دهنده میدان دید (FoV) دوربین است. واضح است که تمام لبه های خارج از FoV باید حذف شوند. علاوه بر این، نزدیکترین نقطه به مرکز پرسپکتیو دوربین و دارای جهتگیری یکسان یا مشابه با تصویر اصلی، به احتمال زیاد لبه مورد نظر است.
همانطور که در شکل 6 نشان داده شده است ، انتخاب لبه مناسب در بین لبه های تعیین شده باید با حذف آن دسته از لبه هایی که خارج از قاب تصویر بیرون زده می شوند و تنها با نگه داشتن آنهایی که در داخل خطوط زرد قرار می گیرند، شروع شود، یعنی FoV دوربین استفاده شده. . روش پروجکشن پشتی با اعمال معادله هم خطی انجام می شود، بنابراین لبه های یافت شده توسط RANSAC به فضای مختصات تصویر برمی گردد. موقعیت ها و جهت های لبه های پیش بینی شده پشتی با لبه هایی که در ابتدا انتخاب شده اند مقایسه می شود. این امر از طریق بررسی اینکه آیا مختصات تصویر برگشتی ( res x ، res y ) معادله خط لبه 2 بعدی اولیه را تأیید می کند (معادله (4)) به دست می آید. اگر تفاوت ها Δ x، Δ y (معادله (5)) کمتر از مقدار آستانه تعریف شده توسط کاربر هستند، لبه حفظ می شود.
پس از آن، نزدیکترین لبه به دوربین انتخاب می شود، زیرا احتمال بیشتری دارد که در تصویر نسبت به دورترین آنها نشان داده شود، یعنی لبه شماره 2 در شکل 6 . در نهایت، لبه انتخاب شده در داخل قاب تصویر محصور می شود و قسمت های بیرونی دور ریخته می شوند. این به این دلیل است که کنترل اندازه و موقعیت لبه شناسایی شده در خارج از تصویر بسیار دشوار است و ممکن است به اشتباه لبه هایی را بپذیرید که نشان دهنده لبه مورد بررسی نیستند. اگر یک لبه دارای طول قابل توجهی در جسم باشد، در قسمت هایی در تصاویر مجاور شناسایی می شود.
برای اجرای آزمایشی الگوریتم و معیارهای انتخاب در ابر نقطه خاص معبد دیمتر، کل زمان دسترسی برای شناسایی یک لبه 25 تا 30 ثانیه و مقدار آستانه اعمال شده 1 پیکسل یا 6 میلی متر بود که معادل میانگین GSD تصاویر. مقدار آستانه با توجه به چگالی ابر نقطه و خطاهای نهایی اضافه شده توسط جهت داخلی و خارجی تصویر تصمیم گیری شد.
6. ارزیابی نتایج
بررسی اینکه آیا خطاهای قابل توجهی به فرآیند در طول اجرای الگوریتم اضافه شده است که بر نتیجه تأثیر می گذارد ضروری تلقی می شود. هر دو روش تعیین صفحه با استفاده از انتشار خطا به توابع مسئول پارامترسازی صفحات بررسی شدند و خطا به صورت زاویه ای و خطی ترجمه شد. نتایج نشان میدهد که خطای معرفیشده توسط الگوریتم در سیستم جهانی کمتر از 0.3 میلیمتر برای تصاویر معمولی زمینی گرفتهشده در فواصل کمتر از 10 متر محاسبه شده است. خطای زاویه ای 0.57 سی سی تخمین زده شد که به 1.105 × 10-6 راد ترجمه می شود که ناچیز در نظر گرفته می شود ( شکل 7)). در نتیجه، تعیین هواپیما بر اساس مشاهدات تصویر کاملاً پایدار است و در معرض تغییرات عمده ای نیست، که ثابت می کند الگوریتم قوی و قدرتمند است. یک پیشرفت آشکار برای کاهش خطای پیش بینی پشتی روی تصویر، گنجاندن پارامترهای کالیبراسیون دوربین در الگوریتم است.
الگوریتم و محدودیتهای تعریفشده، توسعهیافته و پیادهسازی شده در شرایط واقعی برای جهتگیریهای تصویر و طول لبههای مختلف بر روی تصاویر معبد دمتر ارزیابی شدند. نتایج مختلفی که به تنظیم دقیق الگوریتم کمک کردهاند، در این بخش ارائه و ارزیابی میشوند. در عین حال، عملکرد الگوریتم برای موفقیت روش تشخیص لبه به تفصیل توضیح داده شده و در شرایط مختلف ارزیابی می شود. مشاهدات انجام شده برای اطمینان از کاربرد جهانی الگوریتم در بسیاری از موارد لبه های وارداتی و دستیابی به نتایج بهینه از اهمیت ویژه ای برخوردار است. موفقیت و سودمندی الگوریتم بیشتر به انتخاب موفقیتآمیز لبه سهبعدی سمت راست درون ابر نقطه در میان لبههای سهبعدی همسطح متعدد شناساییشده بستگی دارد.شکل 8 ).
دقت نتایج بهدستآمده رضایتبخش است، زیرا مختصات تصویر لبههای شناساییشده به خوبی با لبه دنیای واقعی در هنگام نمایش مجدد روی تصویر مقایسه میشود. به طور خاص، به نظر می رسد تفاوت Δx، Δy کمتر از مقدار آستانه مورد نظر است که روی 1 پیکسل تنظیم شده است. شکل 9 یک هیستوگرام را نشان میدهد که نشان میدهد در مقایسه با ابزار M3C2 در CloudCompare®، دو یال سهبعدی، که در شکل 8 نشان داده شدهاند، با چه موفقیتی با یکدیگر سازگار میشوند .
برخی از تفاوت ها در مختصات تصویر بزرگتر از مجموعه آستانه، یعنی یک پیکسل تعیین شد ( شکل 9 ). این امر به خوردگی سطح بنا نسبت داده می شود که در لبه ها بیشتر نمایان است. البته این تغییر شکل توسط اسکنر لیزری در ابر نقطه ورودی به تصویر کشیده می شود.
تأثیر عدم استفاده از پارامترهای جهت گیری داخلی دقیق و به ویژه فاصله کانونی مدرج بر دقت لبه های شناسایی شده بررسی شد. بدیهی است که استفاده از فاصله کانونی کمی متفاوت نیز تأثیر نامطلوبی بر نتیجه خواهد داشت، زیرا شکل دسته پرتوها تغییر شکل می دهد. این بر مقیاس تصویر همانطور که در شکل 10 الف دیده می شود تأثیر می گذارد، اما همچنین منجر به محلی سازی اشتباه لبه مورد نظر می شود ( شکل 10).ب). فاصله کانونی با فاصله فوکوس تغییر می کند و مقدار اسمی و حداقل آن در فوکوس بی نهایت، در این مورد 24 میلی متر است. با این حال، از آنجایی که تصاویر در فاصله فوکوس متوسط 5 متر گرفته شده اند، فاصله کانونی باید روی مقدار بالاتری تنظیم شود. این مقدار از یک گزارش کالیبراسیون موجود گرفته شد و 02/0 ± 24.5 میلی متر تعیین شد. نقاط لبه یکسان تعیین شده با استفاده از هر دو مقدار فاصله کانونی قرار گرفتند و نتایج در شکل 10 ب نشان داده شده است، جایی که لبه اشتباه نشان داده شده است، و شکل 11، که در آن لبه صحیح با لبه مربوطه که به صورت دستی در ابر نقطه شناسایی شده مقایسه می شود. بدیهی است که تفاوت این دو لبه می تواند بر لبه های سه بعدی حاصل تأثیر منفی بگذارد. تفاوت نقاط لبه شناسایی شده در هنگام استفاده از فاصله کانونی کالیبره شده، همانطور که توسط الگوریتم M3C2 در CloudCompare ® محاسبه شده است ، کمتر از 5 میلی متر است ( شکل 11 ). این بدان معنی است که ترجیحاً باید از فاصله کانونی کالیبره شده استفاده شود، زیرا انتظار می رود استفاده از فاصله کانونی اسمی لنز دوربین باعث ایجاد انحرافات قابل توجهی در تعیین لبه شود.
یک منبع خطای احتمالی متفاوت مربوط به لبههایی است که روی تصاویر با چرخش قابل توجه (ω، φ، یا κ) در زمان دریافت تصویر نشان داده شدهاند. ثابت شد که اگر تمام طول لبه و در طول قابل توجهی تصویربرداری شود، الگوریتم برای تعریف صفحه و مکان یابی لبه سه بعدی در ابر نقطه مشکلی ندارد. برعکس، اگر قسمت کوچکی از لبه کل به تصویر کشیده شود یا برای فرآیند استفاده شود، نتیجه مستقیماً تحت تأثیر قرار می گیرد ( شکل 12 ). اگر در حین انتخاب لبه روی تصویر، آن لبه هایی ترجیح داده شود که طول تصویر تا حد امکان بزرگتر باشد، نتایج قوی و دقیق تری به دست می آید. در شکل 12 ج، خط سفید انحرافات عمده را برای قسمتی از لبه نشان می دهد که مستقیماً در تصویر اصلی توضیح داده نشده است.شکل 12 ب). نتایج با موفقیت استخراج میشوند و دقت مورد نظر را حفظ میکنند، چه لبه بهصورت جلویی یا چرخشی حاد به تصویر کشیده شود، همانطور که در شکل 12 a، با رنگ صورتی ( شکل 12 ج) ارائه شده است.
در نهایت، یکی دیگر از موارد مشکل ساز، به تصویر کشیدن تنها یکی از دو طرف یک لبه در تصویر است ( شکل 13 a). بسته به زاویه عکاسی، این پدیده ممکن است مشکلاتی را برای الگوریتم ایجاد کند. پرتوهای دوربین همانطور که به صورت شماتیک در شکل 13 ب نشان داده شده است به ابر نقطه نفوذ می کند و الگوریتم از کار می افتد. بسته به زاویه محور دوربین، نقاط انتخاب شده روی تصویر خیلی نزدیک هستند، اما دقیقا روی لبه نیستند. صفحه و آستانه استفاده شده توسط الگوریتم دو لبه صورتی رنگ در شکل 13 را برمی گرداند.ب، به جای سیاه و سفید صحیح. این به چگالی ابر نقطه و این واقعیت نسبت داده می شود که در حین اسکن مطمئن نیست که نقاط دقیقاً روی لبه توسط اسکنر ثبت شده باشند. الگوریتم یکی از دو لبه صورتی را انتخاب میکند که بستگی به این دارد که یال انتخابشده به مرکز پرسپکتیو نزدیکتر باشد یا پشتی که به لبه شناسایی شده اولیه روی تصویر نزدیکتر باشد. یک پیشنهاد برای حل این مشکل محدود کردن آستانه یا پیشبینی ابر نقطه متراکمتر در زمان جمعآوری داده است.
7. بحث و نتیجه گیری
در این مقاله، یک روش خودکار موثر برای تشخیص لبههای مستقیم سه بعدی در ابرهای نقطه سازمانیافته با استفاده از مفاهیم اولیه هندسه تحلیلی و فتوگرامتری استاندارد پیشنهاد شدهاست. اجرای الگوریتم نیاز به یک ابر نقطه و تصاویر دیجیتال با جهت بیرونی شناخته شده دارد، هر دو در یک سیستم مختصات. لبه ها ابتدا روی تصاویر شناسایی می شوند و الگوریتم آنها را به نقاط سه بعدی ابر نقطه ای که به هر یک از آنها تعلق دارد متصل می کند.
ویژگی های اصلی الگوریتم پیشنهادی عبارتند از:
-
از روابط هندسی و فضایی تصاویر دیجیتال جهتیافته و ابر نقطهای موجود بهرهبرداری میکند، بنابراین مستقیماً مختصات تصویر دوبعدی و مختصات فضای سهبعدی را به هم متصل میکند.
-
این می تواند تمام لبه های سه بعدی را که کاربر تصویر آنها را روی تصاویر دیجیتال شناسایی کرده است، شناسایی کند، بنابراین به خودکارسازی تولید نقشه های برداری دو بعدی کمک می کند.
-
این یک روش قوی است، زیرا در موارد مختلف با مقیاس تصویر، چرخش تصویر، تمایل لبه و طول متفاوت ارزیابی شده است، بنابراین خطوط هم محور، هم محور و هم محور در محلههای پیچیده را متمایز میکند.
از نظر زمان اجرا، تمامی آزمایش ها بر روی سیستم پردازنده مرکزی Intel i7-6500U (2.50 گیگاهرتز) با رم 8 گیگابایتی انجام شد. زمان مورد نیاز برای اجرای الگوریتم برای ابر نقطه معبد دیمتر (750000 نقطه) 25 تا 30 ثانیه بود. این با معرفی نقاط لبه تصویر شروع می شود و شامل تبدیل ابر نقطه به یک فرم ماتریسی برای پایتون برای دسترسی مناسب به آن و ورودی های مختلف توسط کاربر است ( شکل 2).). هنگامی که لبه ها در CloudCompare ارائه می شوند، ساعت متوقف می شود. بدیهی است که زمان اجرا تا حد زیادی به پیچیدگی شی و اندازه ابر نقطه بستگی دارد. علاوه بر این، وجود لبه های بیشتر به موازات لبه مورد نظر در ابر نقطه احتمالاً روند را کند می کند. تخمین زده می شود که برای یک ابر نقطه ای با مثلاً 7 میلیون نقطه، فرآیند حدود 90 ثانیه نیاز دارد.
نتایج تجربی نشان میدهد که الگوریتم پیشنهادی موفق بوده و انتظارات مربوط به اتوماسیون را در ابتدا برآورده میکند. لبه های سه بعدی مستقیم با استفاده از درک منحصر به فرد تعریف سطوح مختلف با استفاده از لبه های نشان داده شده روی تصاویر و مراکز پرسپکتیو آنها و پارامترهای جهت گیری بیرونی برای توصیف فضای سه بعدی شناسایی می شوند. نتایج نشان داده اند که دقت مورد نیاز به دست آمده است و این روش راه حل های قوی را در زمان محاسباتی کوتاهی ارائه می دهد. در مقایسه با روش های پیشرفته، الگوریتم پیشنهادی می تواند نتایج رضایت بخشی را هم از نظر کیفی و هم از نظر کمی به دست آورد. علاوه بر این، عدم قطعیتهای نتایج روش پیشنهادی ما با رویارویی با مشکلاتی که الگوریتم ممکن است در طول عملیات خود با آن مواجه شود، تحلیل شد.
نتیجه گیری بر دقت تشخیص لبه ها و اینکه آیا کاربر می تواند بر آن تأثیر بگذارد متمرکز است. ارزیابی الگوریتم بر اساس چندین پارامتر است که موفقیت آن را تأیید می کند.
اولین مشخصه ای که کیفیت لبه های شناسایی شده را تعیین می کند و قابل تغییر نیست، دقت و چگالی ذاتی ابر نقطه است. این بستگی به تجهیزات مورد استفاده برای اکتساب و پارامترهای اعمال شده در زمینه دارد. علاوه بر این، خود شی، به ویژه در مورد ساختمانهای میراث فرهنگی، ممکن است تغییر شکلهایی را به دلیل از دست دادن مواد (به عنوان مثال، هوازدگی، تخریبهای شدید استفاده، و غیره) ایجاد کند، که منجر به لبههای عملاً وجود ندارد، یا لبههایی که وجود ندارند. به خوبی تعریف شده است. این موارد باید قبل از اجرای الگوریتم بررسی و شناسایی شوند.
پارامترهای پیاده سازی الگوریتم RANSAC نیز بر دقت تشخیص لبه های سه بعدی تأثیر می گذارد. البته کاربر می تواند برای بهبود نتایج در این امر دخالت کند. اقداماتی که باید انجام شود، اولاً تفسیر صحیح سطوح و ویژگی های آنهاست. ثانیاً، از طریق مقدار پیشفرض، یعنی آستانه، تفسیر صحیح خصوصیات سطوح را در نتایج بدست آوریم. یعنی مکان یابی صحیح نقاط درونی که مدل ریاضی بهینه صفحات از آنها محاسبه می شود.
در مواردی که انحرافی توسط الگوریتم به کاربر ارائه شده است ( شکل 2 )، باید چندین تنظیم برای تعیین لبه بهینه و بررسی نحوه تمایز نتایج انجام شود. این تنظیمات شامل (i) ورودی دقت صحیح مختصات پیکسل استفاده شده به عنوان داده ورودی، (ii) طول لبه ورودی، و (iii) استفاده از حداقل مقدار مدرج ثابت دوربین برای هر تصویر است. اگر معلوم باشد در نهایت، در تصاویری با اعوجاج پرسپکتیو قوی، بدیهی است که تشخیص لبه ها با استفاده از طول کامل آنها و نه قسمت کوچکی از آنها اهمیت دارد. از این رو، تشخیص لبه مورد نظر، در صورت امکان، در تصویری که هر دو طرف آن به وضوح قابل مشاهده است، مهم است ( شکل 14).). این محدودیت ها عملکرد روان الگوریتم را تضمین می کند و منجر به نتایج موفقیت آمیز می شود.
الگوریتم، همانطور که توسعه یافته، به صورت تجربی پیاده سازی شده و ارزیابی شده است، امیدوارکننده است. در این راستا، برخی بهبودها برای افزایش عملکرد و مفید بودن آن پیشنهاد شده است. اولاً، تشخیص لبههای دوبعدی روی تصاویر باید خودکار باشد، زیرا کل روش بر اساس تعیین سریع و قابل اعتماد آنها است. الگوریتمهای تشخیص لبه زیادی وجود دارند که ممکن است بهبود یابند و بخشی از الگوریتم پیشنهادی شوند [ 28 ، 29 ، 30 ، 31 ، 32 ]. ثانیاً، از اعوجاج پرسپکتیو باید اجتناب شود، زیرا بر اجرای الگوریتم تأثیر منفی میگذارد. این را باید در زمان گرفتن تصویر در نظر داشت.
ثالثاً، یک محدودیت اضافی می تواند در اجرای الگوریتم RANSAC گنجانده شود. در موارد تعیین دو یال در دو طرف لبه مورد نظر ( شکل 14 ب)، به شرطی که خیلی نزدیک باشند، یعنی کمتر از آستانه تعیین شده توسط کاربر، لبه جستجو شده را می توان به عنوان محل تلاقی این دو تعیین کرد. صفحات زاویه دو وجهی علاوه بر این، الگوریتم در مجموعه دادههای متنوع و بیشتری برای اثبات استحکام و کارایی آن آزمایش میشود. یک پیشرفت عمده در مرحله نهایی سازی [ 33] بردارسازی خودکار لبه های سه بعدی استخراج شده است. تحقیقات تا کنون نشان داده است که بردارسازی، به عنوان مثال، در قالب “dxf”، ممکن است با اجرای مجدد الگوریتم RANSAC تحقق یابد. در نهایت، یک پیشرفت عمده برنامه ریزی شده، معرفی سطوح ریاضی غیرمسطح، به عنوان مثال، اشکال استوانه ای، یا مخروطی است، بنابراین الگوریتم را به تشخیص لبه های سه بعدی غیر مستقیم گسترش می دهد. به این ترتیب تولید خودکار نقشه های برداری بسیار افزایش می یابد.

















بدون دیدگاه