

تشخیص و محلیسازی با دقت بالا اهداف متحرک در محیط داخلی با استفاده از دید استریو دوچشمی
چکیده

کلید واژه ها:
دید استریو دوچشمی ; تشخیص هدف متحرک ؛ مختصات سه بعدی ؛ جریان نوری ؛ تطبیق استریو
1. مقدمه
2. مواد و روشها
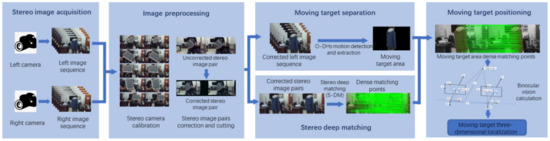
2.1. مروری بر روش ها
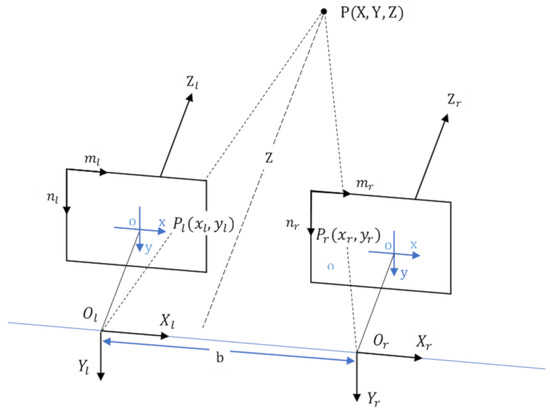
2.2. روش اندازه گیری محلی سازی بصری دوچشمی
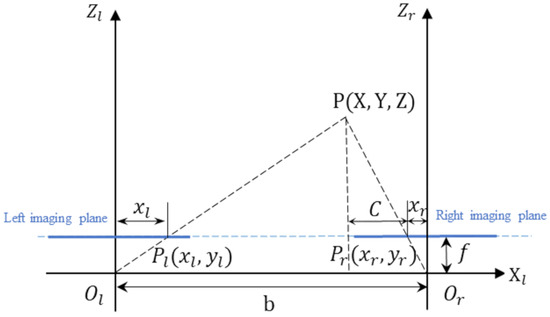
طرح ریزی مدل بر روی سطح طرح ریزی XOZ، که مدل ویسون نشان داده شده در شکل 2 پروژه به صفحه مختصات XOZ است. (همانطور که در شکل 3 نشان داده شده است )، C به عنوان فاصله بین نقطه تلاقی خط عمودی از نقطه P تا صفحه تصویربرداری دوربین و نقطه طرح Pr نقطه P در صفحه تصویربرداری سمت راست تعریف می شود. بر اساس مثلث های مشابه، می توانیم به دست آوریم:
می توانیم دریافت کنیم سی=بایکسr/ایکسل-ایکسr، و با جایگزینی آن به معادله (1)، می توانیم محاسبه کنیم ز:
سپس، د=ایکسل-ایکسrبه عنوان نابرابری تعریف می شود، بنابراین معادله (4) را می توان به صورت زیر بازنویسی کرد:
سپس این به معادله (3) جایگزین می شود:
علاوه بر این، میتوانیم مدل را بر روی سطح طرح YOZ برای محاسبه Y بپردازیم :
با توجه به مدل سوراخ سوزن، رابطه تبدیل بین مختصات دوربین پایکس،y،zو مختصات پیکسل تصویر ممتر،nاست:
جایی که اسعامل مقیاس است. fایکسو fyنشان دهنده فاصله کانونی موثر در جهت X و Y.δایکسو δyنشان دهنده مختصات مرکز تصویر. fایکس، fy، δایکس، و δyپارامترهای داخلی دوربین رنگی استریو هستند. R و T نشان دهنده موقعیت و جهت گیری دوربین در دنیای واقعی هستند که پارامترهای خارجی دوربین استریو هستند. مقادیر پارامتر بالا را می توان با کالیبراسیون دوربین رنگی استریو به دست آورد (به بخش 4 مراجعه کنید ). علاوه بر این، صفحه مختصات با صفحه فضایی همزمان است. در نظر گرفته می شود که مقدار z 0 است که می توان آن را به صورت زیر ساده کرد:
2.3. تشخیص حرکت و استخراج
2.3.1. ساخت مدل جریان نوری HS
گرادیان فضایی به صورت تعریف می شود ∇3من=منایکس منy منتیتی، مشتقات جزئی گرادیان فضایی با توجه به ایکسو yجهت ها هستند ∇3منایکس=منایکسایکس منایکسy منایکستیتی، ∇3منy=منایکسy منyy منyتیتی، و بردار جریان نوری است ω=تو v 1تی. دانستن از فرض روشنایی ثابت، (∇3من)تیω=0. اقلام داده را می توان به صورت زیر تعریف کرد:
جایی که Λضریب انسداد است که یک تابع باینری بر اساس اطلاعات انسداد قبلی است که در آن Λ=1یعنی نقطه مسدود نیست و Λ=0به این معنی که نقطه مسدود شده است (تعیین انسداد به طور مفصل در بخش 2.3.2 توضیح داده شده است ). ψایکس=ایکس2+ξ2یک تابع جریمه غیر مربعی است که در آن 0<ξ≪1، و ξدر این مقاله 0.001 است. از آنجایی که جریان نوری HS توانایی ضعیفی در سرکوب نویز دارد، Weickert [ 37 ] پیشنهاد کرد که ثبات محلی جریان نوری Lucas Kanade (LK) را برای کاهش نویز معرفی کند. مدل های HS و LK را می توان با پیچیدگی تابع گاوسی ادغام کرد کپ، و کپیک تابع هسته گاوسی با شعاع را نشان می دهد ρ. حفاظت از گرادیان برای حل مشکل تغییرات نور که تنها با حفاظت در مقیاس خاکستری قابل حل نیست، معرفی شده است. اصطلاح داده عبارت است از:
جایی که γعبارت خاکستری متعادل کننده و ضریب ترم گرادیان است. اجازه دهید جی0=∇3من∇3منتی، جیایکس=∇3منایکس∇3منایکستی، و جیy=∇3منy∇3منyتی، سپس تابع به صورت زیر ساده می شود:
ما استراتژی همواری همسانگرد اصطلاح همواری جهانی را اتخاذ کردیم که عبارت است از:
برای حل مشکل جریان نوری HS که قادر به تشخیص اهداف متحرک بزرگ نیست، لایهبندی هرمی با وضوح چندگانه را برای اصلاح جریان نوری معرفی کردیم و تصاویر فریم پیوسته را از پایین به بالا با درونیابی دوخطی برای ساخت هرم پایینآوری کردیم. تعداد لایه ها از پایین به بالا می باشد منک،ک=0،1،2،⋯n; مقدار جریان نوری ωک-1=توک-1 vک-1تیمحاسبه شده در لایه k -1 هرم، مقدار جریان نوری اولیه است ω0کاز لایه k بعدی که به آن اضافه می شودکمقدار جریان نوری لایه HS دωک=دتوک دvکتیبرای به دست آوردن مقدار جریان نوری اولیه لایه k +1 بعدی، تا انتهای انتهای هرم، و در نتیجه مقدار جریان نوری نهایی حاصل می شود. مقدار جریان نوری در بالای هرم به صورت تعریف شده است ω0=00تی. ضریب نمونه برداری از درون یابی دو خطی مورد استفاده در این مقاله 0.95 و تعداد لایه ها n=40. تابع این است:
2.3.2. تعیین ناحیه انسداد مثلثی Delaunay
برای موقعیت نقطه پیکسل ب=من jتیکه در من1، به جریان نوری اضافه می شود ω=تو vتیدر نقطه به عنوان نقطه مربوطه من+تو j+vاز ایکس، بنابراین تفاوت خاکستری Δمنبین من1و من2است:
چه زمانی Δمن=0، خاکستری موقعیت های متناظر فریم های متوالی ثابت است، که نشان می دهد نقطه p مسدود نشده است. Λ=1در معادلات (11) – (13). چه زمانی Δمن≠0برای تعیین انسداد، مثلث سازی Delaunay بر روی نقشه تفاوت خاکستری ساخته شده است. روش خاص این است: گرفتن هر نقطه ب1من،jدر تصویر قاب قبلی من1و نقاط مختصات محله ب2من+1،jو ب3من،j+1برای تشکیل یک مثلث منطقه، از رابطه (16) برای محاسبه مقدار جریان نوری مثلث مربوطه در من2، و سپس تغییر خاکستری این مساحت مثلث محاسبه می شود. معادله این است:
جایی که φ1، φ2، و φ3وزن سه نقطه را نشان می دهد. گرفتیم φ1=φ2=φ3=13. ما تفاوت مقیاس خاکستری را بین پیکسلهای همسایه مقایسه کردیم 20×20دور مثلث با مثلث برای تعیین انسداد نقاط همسایه. روش خاص قضاوت عبارت است از: Δمنب>ΔمنΔ، به این معنی که نقطه مسدود شده است، Λ=0، Δمنب<ΔمنΔ، یعنی نقطه مسدود نیست و Λ=1.
2.3.3. استخراج منطقه هدف متحرک
2.4. تطبیق عمیق استریو
2.4.1. ایجاد هرم انجمن
تصویر منلو منrتصاویر دوربین های چپ و راست را به طور همزمان نشان می دهد و تعداد سطرها و ستون ها L و R است. پردازش در مقیاس خاکستری انجام می شود منلو منr. تصویر منلبه بخش های بدون همپوشانی با اندازه تقسیم می شود 4×4، و بخش بندی شده است 4×4تصاویر بلوک، تصاویر بلوک اولیه نامیده می شوند، به طوری که تأثیر نواحی تغییر شکل در آنها کاهش می یابد منلو منrناشی از زوایای مختلف یا جابجایی تصویر بلوک اولیه از 4×4به چهار زیرمنطقه هم اندازه تقسیم می شود و چهار زیر منطقه در محدوده -26درجه،26درجهچرخش داخلی و با تغییر شکل از 1/2،3/2تناسب، قسمت. شباهت را می توان به عنوان میانگین تشابه چهار واحد چهارگانه در نظر گرفت. بنابراین، شباهت بین منلو منrاست:
جایی که اچلو اچrهستند 4×4بلوک های اولیه همان ردیف در تصویر دوربین سمت چپ منلو تصویر دوربین مناسب منr; اچمنلو اچمنrnمنمطابق با توصیفگرهای ویژگی ربع منفرد. د·یک تابع متریک شباهت با محدوده مقدار است 0، 1.
سپس هموارسازی گاوسی بر روی بلوک اولیه قطعهبندی شده H با پارامتر انجام میشودσ1=1برای کاهش اعوجاج ناشی از فشرده سازی تصویر. یک هیستوگرام از گرادیان جهت هر بلوک محاسبه میشود که به دو مرحله تقسیم میشود: (الف) استفاده از عملگر لاپلاسی برای انحراف بلوک H برای به دست آوردن مقدار گرادیان. ∇ایکس،∇y، محاسبه مقدار گرادیان در هشت جهت cos(π/4)من،گناه(π/4)من|من=1،2،3⋯8نمایش غیر منفی برای به دست آوردن مقدار گرادیان هر پیکسل در هشت جهت گفته شده. ب) به منظور کاهش تأثیر نور و سایه های محلی تصویر، 1+ه-τایکس/1+ه-τایکس τ=0.2برای اصلاح استفاده می شود. سپس، هموارسازی گاوسی دوباره برای به دست آوردن هیستوگرام جهت گرادیان استفاده می شود. با کاهش مقدار وزن در جهت کوچکتر و افزایش مقدار وزن در جهت بزرگتر می توان تاثیر مقدار جهت بزرگتر را افزایش داد. فرمول شباهت توصیفگر ویژگی پیکسل به صورت زیر است:
سپس نمودار ارتباطی زیرین هرم بر اساس آن محاسبه می شود داچل،اچrپیچیدگی اچمن،j·هیستوگرام جهت گرادیان را نشان می دهد و منمتر،پ،qrبرای نمایش تصویر بلوک مرتبط گراف تداعی تعریف شده است. {پ،q| پ∈2،6،10⋯L-2،q∈2،6،10⋯آر-2}به این معنی است که نقطه مرکزی تصویر بلوک است پ،q; m یعنی اندازه بلوک است متر×متر (متر=4⋅2تی. t تعداد تکرارهای فعلی را نشان می دهد). منqلنشان دهنده ناحیه جستجویی است که شکل در همان خط افقی در تصویر سمت راست قرار دارد. نمودار ارتباط سی4،پرا می توان از پیچیدگی به دست آورد من4،پ،qrو منqلمطابق با معادله (19). برای هر نقطه پrدر هواپیمای تصویربرداری سمت راست منل، سی4،پپrنشان دهنده درجه تطابق بین من4،پلو من4،پr.
یک نمودار ارتباطی از لایه قبلی با تجمیع تصاویر بلوک کوچکتر در پایین برج طلایی نمودار انجمن در تصویر بلوک بزرگتر به دست می آید، به این معنی که متر×متربلوک توسط چهار بلوک اندازه تصاویر جمع می شود متر2×متر2. منمتر،پ،q=منمتر2، پ+متر4سمن،q+متر4سمن|من=1،2،3،4،، س1=-1،-1تی،س2=-1،1تی،س3=1،-1تی، و س4=1،1تی. نمودار ارتباط جمعآوری شده به صورت زیر است:
از آنجا که max-pooling فقط حداکثر مقدار همبستگی را حفظ می کند، به منظور حفظ استحکام مقادیر همبستگی بزرگتر در طول فرآیند تکرار، یک نگاشت غیرخطی γ معرفی می شود: γ:سی(پ،q)r→سی(پ،q)rμو تابع تکرار همبستگی نهایی به صورت زیر است:
2.4.2. انتقال تطبیق هرم انجمن
با استفاده از تصویر بلوک مرتبط احتمالی در لایه های بالایی هرم به عنوان یک تصویر بلوک بریده، مطابقت مطابق به لایه پایین هرم منتقل می شود و به نمودار ارتباط لایه پایین بازگردانده می شود. تطابق بهینه یک تصویر در سطوح مختلف هرم برای تشکیل کمترین نتیجه تطابق انتخاب شده است. بلوک برش منمتر،پاز چهار ربع فرعی تشکیل شده است منمتر،پ،q،من|من=1،2،3،4; به دلیل نمونه گیری حداکثر جمع آوری، منمتر،پ،qr،منمربوط به منطقه بلوک است منمتر2،پ،qr+سمن+ℓمندر لایه بعدی، و ℓمننشان دهنده جابجایی است:
پ،qمنبه عنوان … تعریف شده است پ،q+سمنو (پ،q)منrمانند 2(پ،q)r+سمن+ℓمن; اجازه دهید آرپ،q،پ،qr،متر،ℓنشان دهنده امتیاز انجمن است، با m نشان دهنده اندازه بلوک است متر×متر، مختصات پیکسل مرکزی p یا است پrو درجه منطبق بودن آن ℓ. بدین ترتیب، آراست:
یا
کبه عنوان … تعریف شده است پ،q،پ،qr،متر،ℓ; با در نظر گرفتن وضعیت تطبیق در بلوک برش ک=پ،q،پ،qr،متر،سیمتر2،پ،qپ،qrو سپس به پایین هرم بازگشت، انتقال تطبیق دارای بلوک های همپوشانی بسیاری است. در اینجا، ما فقط بلوکی را با بالاترین امتیاز ارتباطی عقب نشینی کردیم، در حالی که آنهایی که امتیاز کمتری داشتند حذف شدند. مطابق رابطه (23)، تطابق عمیق استریو به صورت زیر بدست می آید:
در نهایت، نتیجه تطبیق کEبرای یافتن بهترین جفت های منطبق فیلتر شده است. در جزئیات، با توجه به کEنتایج مطابق، تصاویر منلو منrبا مرکز برگردانده می شوند پ،qلو پ،qلبا اندازه میدان 4 × 4 به عنوان بهترین جفت تطبیق. حالت مطلوبپ،qل است تعریف شده است مانند حالت مطلوبپ،qr، به این معنی که پ،qلو پ،qrبهترین جفت تطبیق هستند، که در آن پ،qل=پ،qبلوک اولیه مربوطه در صفحه تصویربرداری دوربین سمت چپ مربوط به بلوک مرتبط است، بنابراین نتیجه تطبیق می تواند به صورت زیر بیان شود:
2.4.3. تست سازگاری
3. نتایج
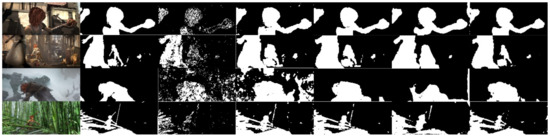
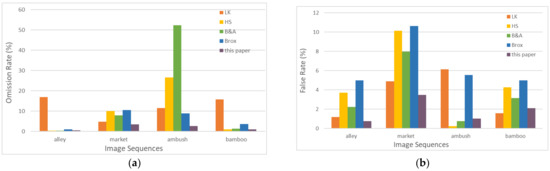
3.1. تشخیص حرکت و تجزیه و تحلیل دقت استخراج
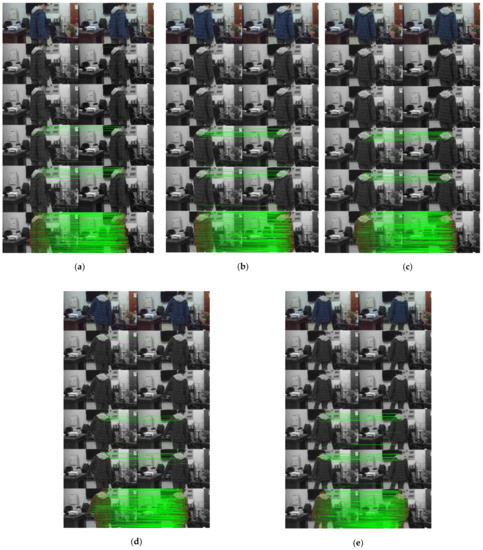
3.2. تجزیه و تحلیل تطبیق عمیق استریو
3.3. نتایج تجربی جفت تصاویر واقعی استریو
داده های تجربی با استفاده از یک حسگر USB دوچشمی با وضوح 1280 × 720 برای به دست آوردن توالی تصویر به دست آمد. ابتدا دوربین دوچشمی کالیبره شد و ماتریس پارامترهای داخلی دوربین های چپ و راست به صورت تعریف شد. ∗لهfتیو ∗rمنgساعتتی. روش کالیبراسیون Zhengyou Zhang مقدار ماتریس پارامتر داخلی دوربین دستگاه دوچشمی را در این آزمایش اندازهگیری کرد:
ماتریس ترجمه و بردار ترجمه عبارت بودند از:
4. بحث و نتیجه گیری
منابع
- ظفری، ف. گکلیاس، ع. Leung، KK بررسی سیستمها و فناوریهای محلیسازی داخلی. IEEE Commun. Surv. آموزش 2019 ، 21 ، 2568–2599. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یاسین، ع. ناصر، ی. عوض، م. الدبی، ع. لیو، آر. یوئن، سی. راولفس، آر. ابوتانیوس §، E. پیشرفت های اخیر در محلی سازی داخلی: بررسی روی رویکردها و کاربردهای نظری. IEEE Commun. Surv. Tutorials 2017 , 19 , 1327–1346. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Furfari، F. بعدی برای محلی سازی داخلی چیست؟ طبقه بندی، پروتکل ها و الگوهای خدمات مبتنی بر مکان پیشرفته. در مجموعه مقالات کنفرانس بین المللی 2019 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، پیزا، ایتالیا، 30 سپتامبر تا 3 اکتبر 2019. [ Google Scholar ]
- کیم، جی. جون، اچ. موقعیت یابی مکان مبتنی بر ویژن با استفاده از واقعیت افزوده برای ناوبری داخلی. IEEE Trans. مصرف کنید. الکترون. 2008 ، 54 ، 954-962. [ Google Scholar ] [ CrossRef ]
- تئولیره، سی. مارچند، ای. Eck, L. ردیابی مبتنی بر مدل سه بعدی برای مکان یابی فضای داخلی پهپاد. IEEE Trans. سایبرن. 2014 ، 45 ، 869-879. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Barsocchi، P. ارزیابی راه حل های AAL از طریق معیارهای رقابتی: رقابت بومی سازی. محاسبات فراگیر IEEE Mag. 2013 ، 12 ، 72-79. [ Google Scholar ] [ CrossRef ]
- داوداق، اس.پ. بارسوچی، بی. Eda, M. معماری خصوصی با طراحی برای سیستم های محلی سازی داخلی. در مجموعه مقالات کیفیت فناوری اطلاعات و ارتباطات: سیزدهمین کنفرانس بین المللی، QUATIC 2020، فارو، پرتغال، 9 تا 11 سپتامبر 2020؛ Springer Nature: برلین/هایدلبرگ، آلمان، 2020. [ Google Scholar ]
- Manzo، M. تطبیق تصویر مبتنی بر نمودار برای محلیسازی فضای داخلی. ماخ فرا گرفتن. بدانید. اضافی 2019 ، 1 ، 46. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Potortì, F. ارزیابی سیستم های محلی سازی داخلی: نظرات در مورد استاندارد ISO/IEC 18305. در مجموعه مقالات کنفرانس بین المللی 2018 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، نانت، فرانسه، 24 تا 27 سپتامبر 2018. [ Google Scholar ]
- زامپلا، اف. رویز، ARJ; Granja، موقعیتیابی FS در فضای داخلی با استفاده از تطبیق نقشه کارآمد، اندازهگیریهای RSS و یک مدل حرکتی بهبودیافته. IEEE Trans. وه تکنولوژی 2015 ، 64 ، 1304-1317. [ Google Scholar ] [ CrossRef ]
- پوتورتی، اف. کریولو، آ. جیرولامی، م. بارسوچی، پی. Traficante، E. محلی سازی جمعیت از طریق کاوشگرهای Wi-Fi. Ad Hoc Networks 2018 ، 75-76 ، 87-97. [ Google Scholar ] [ CrossRef ]
- وانگ، دی. وانگ، تی. ژائو، اف. ژانگ، ایکس. یادگیری نیمه نظارتی مبتنی بر نمودار برای محلیسازی فضای داخلی بر اساس اثر انگشت بهبود یافته است. در مجموعه مقالات کنفرانس ارتباطات جهانی IEEE 2018 (GLOBECOM)، ابوظبی، امارات متحده عربی، 9 تا 13 دسامبر 2018؛ صص 1-6. [ Google Scholar ]
- پوتورتی، اف. پارک، اس. کریولو، آ. پالمبو، اف. جیرولامی، م. بارسوچی، پی. لی، اس. تورس-سوسپدرا، جی. رویز، ARJ; پرز-ناوارو، آ. و همکاران مسابقه محلی سازی داخلی IPIN 2019 – توضیحات و نتایج. دسترسی IEEE 2020 ، 8 ، 206674–206718. [ Google Scholar ] [ CrossRef ]
- لی، تی.-جی. کیم، سی.-اچ. Cho, D.-ID یک روش SLAM کارآمد مبتنی بر حسگر بینایی تک چشمی برای روبات های سرویس داخلی. IEEE Trans. الکترون صنعتی 2018 ، 66 ، 318-328. [ Google Scholar ] [ CrossRef ]
- وانگ، سی. زو، ایکس. تانگ، ی. لو، ال. Feng, W. محلی سازی لیچی در یک محیط بدون ساختار با استفاده از دید استریو دوچشمی. Biosyst. مهندس 2016 ، 145 ، 39-51. [ Google Scholar ] [ CrossRef ]
- ژنگ، L.-W. چانگ، Y.-H. لی، Z.-Z. مطالعه ردیابی و محلی سازی ویژگی های سه بعدی با استفاده از سیستم دید استریو در مجموعه مقالات سمپوزیوم بین المللی کامپیوتر 2010 (ICS2010)، تاینان، تایوان، 16-18 دسامبر 2010. ص 402-407. [ Google Scholar ]
- ژانگ، ی. سو، ی. یانگ، جی. پونس، جی. کنگ، اچ. وقتی دایکسترا با نقطه ناپدید شدن ملاقات می کند: رویکرد دید استریو برای تشخیص جاده. IEEE Trans. فرآیند تصویر 2018 ، 27 ، 2176-2188. [ Google Scholar ] [ CrossRef ]
- شی، س. لی، سی. وانگ، سی. لو، اچ. هوانگ، Q. فوکودا، تی. طراحی و اجرای یک سیستم دید همه جانبه برای ادراک ربات. مکاترونیک 2017 ، 41 ، 58-66. [ Google Scholar ] [ CrossRef ]
- یانگ، ال. وانگ، بی. ژانگ، آر. ژو، اچ. وانگ، آر. تجزیه و تحلیل در مورد دقت مکان برای سیستم بینایی استریو دوچشمی. IEEE Photonics J. 2017 ، 10 ، 1-16. [ Google Scholar ] [ CrossRef ]
- ودل، تی. پوک، سی. زک، اچ. Bischof، DC یک الگوریتم بهبود یافته برای جریان نوری TV-L 1 . در رویکردهای آماری و هندسی به تحلیل حرکت بصری ; Springer: برلین/هایدلبرگ، آلمان، 2009. [ Google Scholar ]
- شوستر، جنرال موتورز; Katsaggelos، AK نظریه ای برای تخصیص بیت بهینه بین میدان برداری جابجایی و اختلاف قاب جابجا شده. IEEE J. Sel. مناطق کمون. 1997 ، 15 ، 1739-1751. [ Google Scholar ] [ CrossRef ]
- فتحی، م. Siyal، MY یک تکنیک تشخیص تصویر مبتنی بر تشخیص لبه مورفولوژیکی و تفاوت پسزمینه برای تجزیه و تحلیل ترافیک در زمان واقعی. تشخیص الگو Lett. 1995 ، 16 ، 1321-1330. [ Google Scholar ] [ CrossRef ]
- ژانگ، سی. چن، ز. وانگ، ام. لی، ام. جیانگ، اس. تخمین جریان نوری غیر محلی TV-L 1 قوی با تشخیص انسداد. IEEE Trans. فرآیند تصویر 2017 ، 26 ، 4055-4067. [ Google Scholar ] [ CrossRef ]
- چن، جی. کای، ز. لای، جی. Xie، X. PatchMatch مبتنی بر تقسیم بندی کارآمد برای تخمین جریان نوری با جابجایی بزرگ. IEEE Trans. سیستم مدار. فناوری ویدئو 2018 ، 29 ، 3595–3607. [ Google Scholar ] [ CrossRef ]
- لی، ز. وانگ، ک. زو، دبلیو. منگ، دی. ژانگ، ال. بازسازی استریو چند نمای تنوعی با حفظ جزئیات و آگاه از محتوا. IEEE Trans. فرآیند تصویر 2015 ، 25 ، 864-877. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دلار، P. اپل، آر. بلنگی، اس. Perona، P. Fast Feature Herramids for Object Detection. IEEE Trans. الگوی مقعدی ماخ هوشمند 2014 ، 36 ، 1532-1545. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هریس، سی. استفنز، ام. آشکارساز گوشه و لبه ترکیبی. در مجموعه مقالات کنفرانس Alvey Vision، منچستر، انگلستان، 15-17 سپتامبر 1988; جلد 15، صص 147–151. [ Google Scholar ]
- ویژگی های تصویر متمایز Lowe، DG از نقاط کلیدی Scale-Invariant. بین المللی جی. کامپیوتر. Vis. 2004 ، 60 ، 91-110. [ Google Scholar ] [ CrossRef ]
- بی، اچ. تویتلارس، تی. Van Gool، L. Surf: سرعت بخشیدن به ویژگی های قوی. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2006; ص 404-417. [ Google Scholar ]
- چن، جی. خو، دبلیو. خو، اچ. لین، اف. سان، ی. شی، ایکس. تشخیص سریع خودرو با استفاده از روش طرح ریزی نابرابری. IEEE Trans. هوشمند ترانسپ سیستم 2017 ، 19 ، 2801-2813. [ Google Scholar ] [ CrossRef ]
- باسارو، آر.آر. کودک، سی. آلونسو، ای. Slabaugh, G. بازیابی عمق دست مبتنی بر داده با استفاده از CRRF در تصاویر استریو. محاسبات IET. Vis. 2018 ، 12 ، 666-678. [ Google Scholar ] [ CrossRef ]
- توفیس، سی. کیرکو، سی. Theocharides, T. یک سیستم دید استریو تعبیه شده در زمان واقعی کم هزینه برای تخمین دقیق نابرابری بر اساس فیلتر هدایت شده تصویر. IEEE Trans. محاسبه کنید. 2015 ، 65 ، 2678-2693. [ Google Scholar ] [ CrossRef ]
- یانگ، ی. منگ، ایکس. Gao، M. Vision سیستم ربات متحرک ترکیبی از دوربین های دوچشمی و عمقی. J. Sensors 2017 ، 2017 ، 1-11. [ Google Scholar ] [ CrossRef ]
- ژانگ، سی. چن، ز. وانگ، ام. لی، ام. جیانگ، اس. تشخیص انسداد حرکتی از توالی تصویر بر اساس جریان نوری و مثلث سازی دلونای. Acta Electron. گناه 2018 ، 46 ، 479-485. [ Google Scholar ]
- Otsu، N. روش انتخاب آستانه از هیستوگرام های سطح خاکستری. IEEE Trans. سیستم مرد سایبرن. 1979 ، 9 ، 62-66. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کندی، آر. Taylor، CJ جریان نوری با تخمین انسداد هندسی و ادغام چند فریم. در کارگاه بین المللی روش های کمینه سازی انرژی در بینایی کامپیوتری و تشخیص الگو ; Springer: Cham, Switzerland, 2015; صص 364-377. [ Google Scholar ]
- ویکرت، جی. ویکرت، جی. مبانی نظری انتشار ناهمسانگرد در پردازش تصویر . Springer Science and Business Media LLC: برلین، آلمان، 1996. [ Google Scholar ]
- Revaud, J.; واینزاپفل، پ. هارکاوی، ز. اشمید، سی. تطبیق عمیق: تطبیق متراکم تغییر شکل سلسله مراتبی. بین المللی جی. کامپیوتر. Vis. 2016 ، 120 ، 300-323. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- واینزاپفل، پ. Revaud, J.; هارکاوی، ز. Schmid, C. DeepFlow: جریان نوری با جابجایی بزرگ با تطبیق عمیق. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، سیدنی، استرالیا، 2 تا 8 دسامبر 2013. صص 1385–1392. [ Google Scholar ]
- دلال، ن. Triggs، B. هیستوگرام گرادیان های جهت یافته برای تشخیص انسان. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2005 در مورد دید رایانه و تشخیص الگوی CVPR، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 20-25 ژوئن 2005. [ Google Scholar ]
- باتلر، دی جی; وولف، جی. استانلی، GB; Black, MJ یک فیلم منبع باز طبیعی برای ارزیابی جریان نوری. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2012; صص 611-625. [ Google Scholar ]
- Bouguet، JY هرمی پیاده سازی affine lucas kanade شرح ردیاب ویژگی الگوریتم. اینتل Corp. 2001 ، 5 ، 1-10. [ Google Scholar ]
- شاخ، BKP; Schunck، BG تعیین جریان نوری. آرتیف. هوشمند 1981 ، 17 ، 185-203. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سیاه، MJ; Anandan، P. تخمین قوی حرکات چندگانه: میدان های جریان پارامتریک و تکه ای-صاف. محاسبه کنید. Vis. تصویر زیر. 1996 ، 63 ، 75-104. [ Google Scholar ] [ CrossRef ]
- براکس، تی. برون، ا. Papenberg، N. برآورد جریان نوری با دقت بالا بر اساس یک نظریه برای تاب. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2004; صص 25-36. [ Google Scholar ]
- چارشتاین، دی. هیرشمولر، اچ. کیتاجیما، ی. کراتوول، جی. نشیچ، ن. وانگ، ایکس. Westling، P. مجموعه دادههای استریو با وضوح بالا با حقیقت زمینی دقیق زیر پیکسل. در کنفرانس آلمان در مورد شناسایی الگوها ; Springer: Cham, Switzerland, 2014; صص 31-42. [ Google Scholar ]






بدون دیدگاه