

کلید واژه ها:
تعمیم خودکار نقشه ; چارچوب دانش محور ; کمیت شباهت هندسی ; فضای نقشه چند مقیاسی ; ترسیم منطقه شهری
1. مقدمه
2. روش شناسی
2.1. داده های تجربی
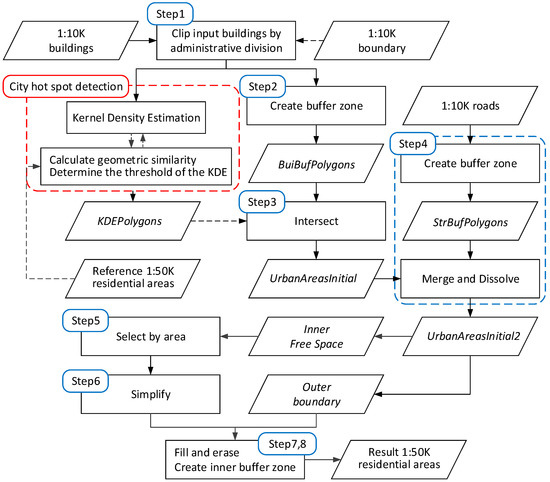
2.2. روش تعمیم مناطق مسکونی از چارچوب دانش محور پیروی می کند
2.2.1. شناسایی ساختار و شناسایی فرآیند بر اساس تحلیل نقشه
-
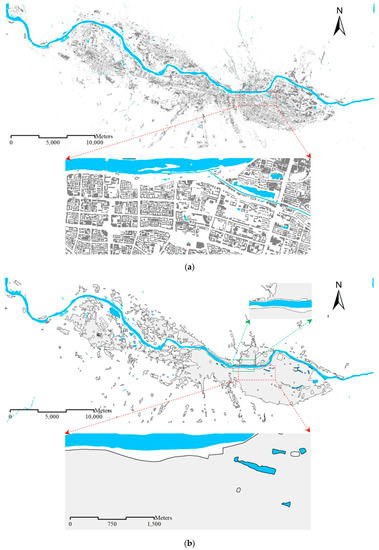
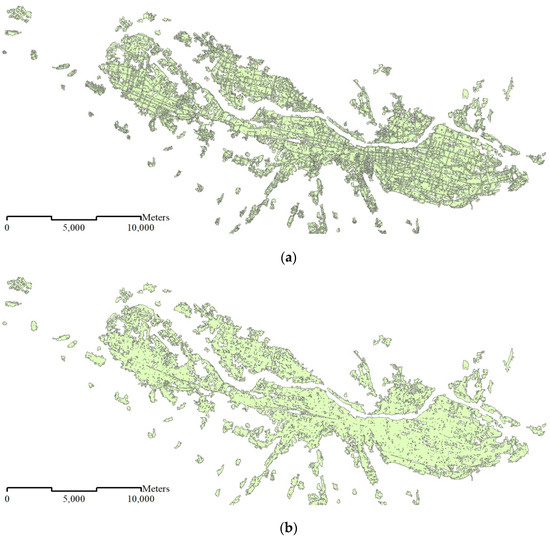
در مجموعه داده 1:10K، مناطق مسکونی به عنوان ساختمان نشان داده می شوند ( شکل 1 a).
-
در مجموعه داده 1:50K، مناطق مسکونی با استفاده از گروهها و بلوکهای ساختمانی نشان داده میشوند [ 9 ] ( شکل 1 ب) در مقیاس 1:50K، جادهها نشان داده نمیشوند، بنابراین مناطق مسکونی را میتوان به بلوکها تقسیم کرد.
-
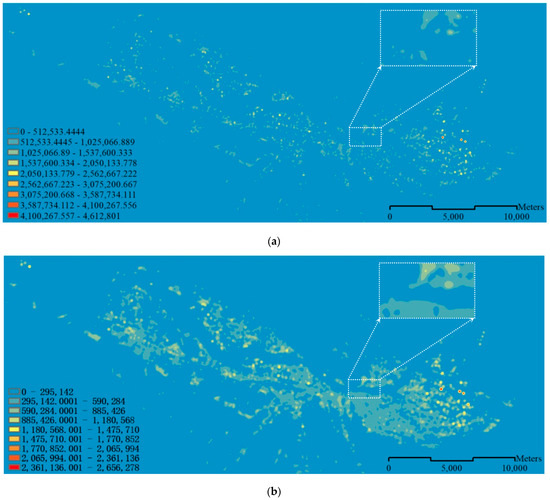
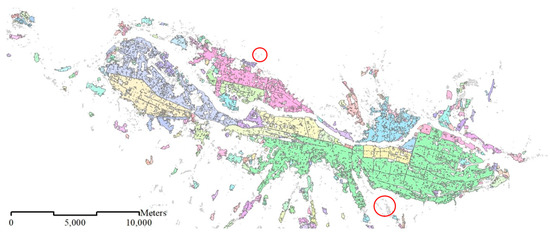
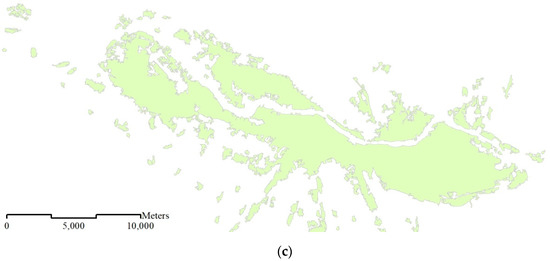
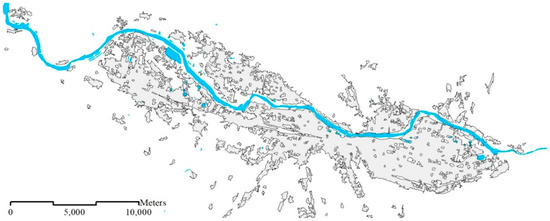
در مجموعه داده 1:250K، مناطق مسکونی کل سکونتگاه های شهری را به تصویر می کشند ( شکل 2 a).
-
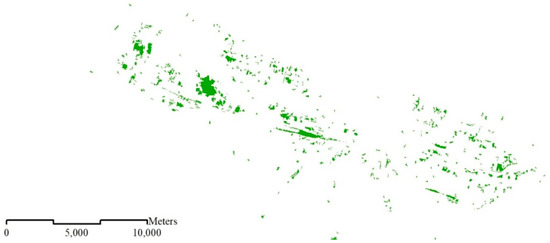
در مجموعه داده 1:1M، فقط شهرهای بزرگ (یعنی مناطق مسکونی) ظاهر می شوند ( شکل 2 ب).
2.2.2. مدلسازی فرآیند
-
فاصله بافر
-
آستانه انتخاب
-
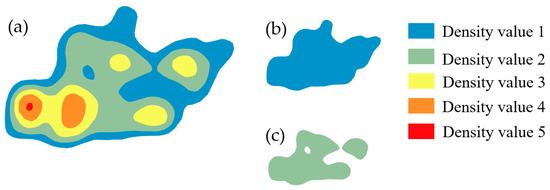
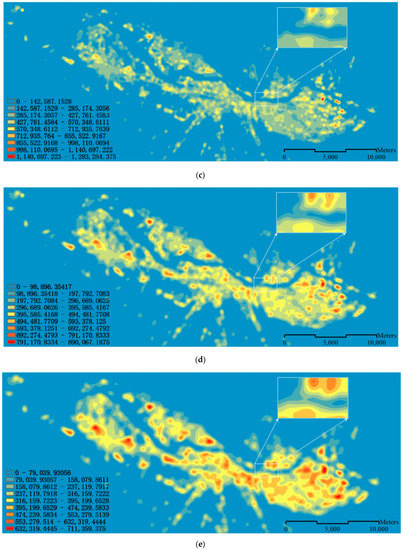
آستانه KDE
جایی که D e n s i t y( x ، y)دیه�سمنتی�(ایکس،�)چگالی پیش بینی شده در یک مکان جدید است ( x ، y)(ایکس،�); r a dمن تو هستی�آدمنتوسشعاع جستجو از نقطه است ( x ، y) (ایکس،�); i = 1 ، … ، nمن=1،…،�نقاط داخل هستند ( x ، y)(ایکس،�)فاصله شعاع؛ و p oپمنپ�پمنمقدار فیلد جمعیت است. و دمن _تیمندمنستیمننشان دهنده فاصله بین سلول و منتی ساعتمنتیساعتنقطه ای در محله دایره ای شکل
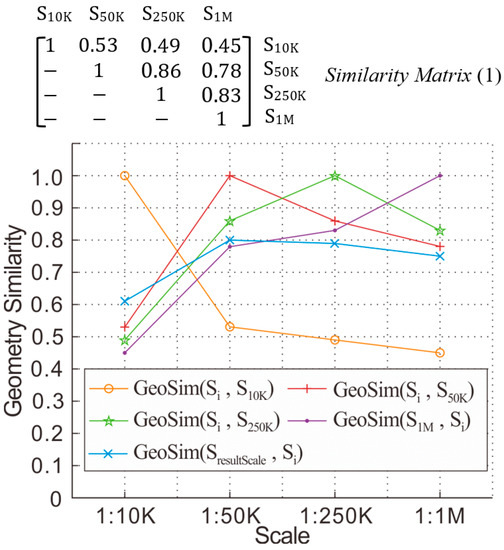
جایی که G e o Sim ( O b j D , RefD )جیه�سیم(�ب�دی،RefD)درجه تشابه بین داده های شی و داده های مرجع است. کارکرد f�مساحت مناطق خاص را اندازه گیری می کند. O b j D ∩ R e fدی�ب�دی∩آره�دیمناطق مشترک متعلق به داده های شی و داده های مرجع را نشان می دهد. O b j D − R e fدی�ب�دی–آره�دینشان دهنده مناطقی است که به داده های شی تعلق دارند اما نه به داده های مرجع. و R ه fD − O b j Dه�دی–�ب�دیمناطقی هستند که به داده های مرجع تعلق دارند اما به داده های شی تعلق ندارند.
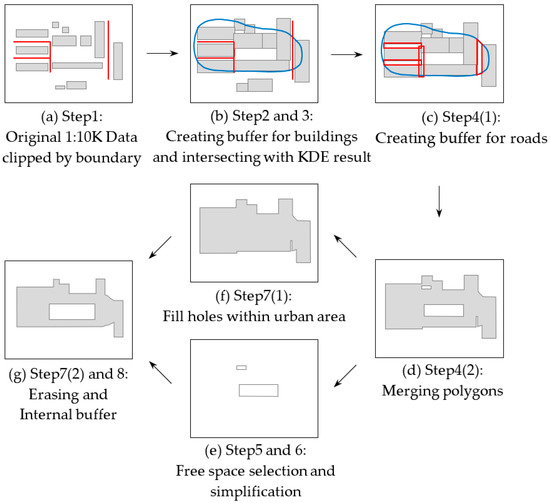
2.2.3. فرآیند تعمیم تفصیلی
3. آزمایش ها و نتایج
3.1. نتایج و تجزیه و تحلیل
3.1.1. نتایج و تجزیه و تحلیل تشابه هندسی
3.1.2. نتایج KDE با مقادیر آستانه متفاوت و بازرسی دستی
3.1.3. اندازه گیری تشابه و تعیین آستانه
3.1.4. نتایج تعمیم
3.2. ارزیابی
3.2.1. مقایسه بصری با داده های مرجع 1:50K
3.2.2. ارزیابی کمی
3.2.3. ارضای نیازها در عمل
4. بحث
5. نتیجه گیری و کار آینده
منابع
- رواس، الف. خودکارسازی تعمیم داده های جغرافیایی: سن بلوغ؟ در مجموعه مقالات بیستمین کنفرانس بین المللی کارتوگرافی، پکن، چین، 6 اوت 2001. [ Google Scholar ]
- لی، دی. هاردی، پی. تعمیم خودکار – ابزارها و مدل ها. در مجموعه مقالات بیست و دوم کنفرانس بین المللی کارتوگرافی، لاکرونیا، اسپانیا، 11 تا 16 ژوئیه 2005. [ Google Scholar ]
- دوچن، سی. رواس، ع. Cambier, C. مدل CartACom: تبدیل ویژگی های نقشه برداری به عوامل ارتباطی برای تعمیم نقشه برداری. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1533-1562. [ Google Scholar ] [ CrossRef ]
- یانگ، م. آی، تی. یان، ایکس. چن، ی. Zhang، X. یک روش مبتنی بر نقشه-جبر برای تشخیص خودکار تغییرات و بهروزرسانی دادههای مکانی در مقیاسهای چندگانه. ترانس. GIS 2018 ، 22 ، 435-454. [ Google Scholar ] [ CrossRef ]
- یو، دبلیو. ژانگ، ی. Chen, Z. تعمیم خودکار نقاط مورد علاقه تسهیلات با تعیین حدود منطقه خدمات. دسترسی IEEE 2019 ، 7 ، 63921–63935. [ Google Scholar ] [ CrossRef ]
- یان، اچ. Li, J. روابط شباهت فضایی در فضاهای نقشه چند مقیاسی . Springer International Publishing: Cham, Switzerland, 2015. [ Google Scholar ]
- ویبل، آر. کلر، اس. Reichenbacher، T. غلبه بر گلوگاه کسب دانش در تعمیم نقشه: نقش سیستم های تعاملی و هوش محاسباتی. در مجموعه مقالات دومین کنفرانس بین المللی نظریه اطلاعات فضایی (COSIT 95)، سمرینگ، اتریش، 21 سپتامبر 1995. [ Google Scholar ]
- Kilpeläinen، T. کسب دانش برای قوانین تعمیم. کارتوگر. Geogr. Inf. علمی 2000 ، 27 ، 41-50. [ Google Scholar ] [ CrossRef ]
- Mustiere، S. تعمیم نقشه برداری جاده ها در یک رویکرد محلی و تطبیقی: یک مشکل کسب دانش. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 937-955. [ Google Scholar ] [ CrossRef ]
- داگلاس، دی اچ. الگوریتم های Peucker، TK برای کاهش تعداد نقاط مورد نیاز برای نمایش یک خط دیجیتالی یا کاریکاتور آن. می توان. کارتوگر. J. 1973 , 10 , 112-122. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رگنولد، ن. ادواردز، آ. Barrault, M. استراتژیها در تعمیم ساختمان: مدلسازی دنباله، محدود کردن انتخاب. در مجموعه مقالات نوزدهمین کارگاه ICC در مورد پیشرفت و توسعه در تعمیم خودکار نقشه، اتاوا، ON، کانادا، 14 تا 21 اوت 1999. [ Google Scholar ]
- Sester, M. بهینه سازی رویکردها برای تعمیم و انتزاع داده ها. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 871-897. [ Google Scholar ] [ CrossRef ]
- Bayer, T. ساده سازی خودکار ساختمان با استفاده از رویکرد بازگشتی. در کارتوگرافی در اروپای مرکزی و شرقی ; Gartner, G., Ortag, F., Eds. Springer: برلین/هایدلبرگ، آلمان، 2009; صص 121-146. [ Google Scholar ]
- یان، ایکس. آی، تی. Zhang، X. روش تطبیق و سادهسازی الگو برای ساخت ویژگیها بر اساس شناخت شکل. بین المللی J. Geo-Inf. 2017 ، 6 ، 250. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- یانگ، م. یوان، تی. یان، ایکس. آی، تی. جیانگ، سی. یک رویکرد ترکیبی برای ساده سازی ساختمان با یک ارزیاب از یک شبکه عصبی پس انتشار. بین المللی جی. جئوگر. Inf. علمی 2021 ، 5 ، 1-30. [ Google Scholar ] [ CrossRef ]
- زیر.؛ لی، ز. مدلهای جبری Lodwick، G. Jean-Claude Muller برای تجمیع ویژگیهای ناحیه بر اساس عملگرهای مورفولوژیکی. بین المللی جی. جئوگر. Inf. علمی 1997 ، 11 ، 233-246. [ Google Scholar ] [ CrossRef ]
- لی، ز. یان، اچ. آی، تی. چن، جی. تعمیم خودکار ساختمان بر اساس مورفولوژی شهری و نظریه گشتالت. بین المللی جی. جئوگر. Inf. علمی 2004 ، 18 ، 513-534. [ Google Scholar ] [ CrossRef ]
- QI، H.; لی، زی. رویکردی به گروه بندی ساختمان بر اساس محدودیت های سلسله مراتبی. در آرشیو بین المللی فتوگرامتری، سنجش از دور و علوم اطلاعات فضایی. جلد ⅩⅩⅩⅤⅠⅠ. قسمت B2 (ص 449-454). در دسترس آنلاین: https://www.isprs.org/proceedings/XXXVII/congress/2_pdf/3_WG-II-3/13.pdf (دسترسی در 10 اکتبر 2021).
- بادر، ام. روشهای کمینه سازی انرژی برای جابجایی ویژگی در تعمیم نقشه. Ph.D. Thesis, Universität Zürich, Zürich, Switzerland, 2001. [ Google Scholar ]
- آی، تی. ژانگ، ایکس. ژو، Q. یانگ، ام. یک مدل میدان برداری برای مدیریت جابجایی تضادهای متعدد در تعمیم ساختمان. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 1310-1331. [ Google Scholar ] [ CrossRef ]
- پیله فروشها، پ. کریمی، م. منصوریان، ع. یک مدل جدید ترکیبی از جابجایی بلوک های ساختمانی و کاهش مساحت بلوک های ساختمانی برای حل تعارضات فضایی. ترانس. GIS 2021 , 25 , 1366–1395. [ Google Scholar ] [ CrossRef ]
- براسل، ک. Weibel, R. مرور و چارچوب مفهومی تعمیم خودکار نقشه. بین المللی جی. جئوگر. Inf. سیستم 1988 ، 2 ، 229-244. [ Google Scholar ] [ CrossRef ]
- مک مستر، RB; شی، تعمیم KS در کارتوگرافی دیجیتال . انجمن جغرافیدانان آمریکایی: واشنگتن، دی سی، ایالات متحده آمریکا، 1992. [ Google Scholar ]
- گالاندا، ام. تعمیم خودکار چندضلعی در یک سیستم چند عاملی. Ph.D. Thesis, Universität Zürich, Zürich, Switzerland, 2003. [ Google Scholar ]
- سارجاکوسکی، مدلهای مفهومی تعمیم و بازنمایی چندگانه LT. در تعمیم اطلاعات جغرافیایی: مدلسازی نقشه برداری و کاربردها ; Mackaness, W., Ruas, A., Sarjakoski, LT, Eds. الزویر: آکسفورد، انگلستان، 2007; صص 11-36. [ Google Scholar ]
- اوکیف، جی. داستروفسکی، جی. هیپوکامپ به عنوان یک نقشه فضایی: شواهد اولیه از فعالیت واحد در موش صحرایی با حرکت آزادانه. Brain Res. 1971 ، 34 ، 171-175. [ Google Scholar ] [ CrossRef ]
- اوکیف، جی. نادل، ال . هیپوکامپ به عنوان یک نقشه شناختی . کلارندون: آکسفورد، بریتانیا، 1978. [ Google Scholar ]
- هفتینگ، تی. فاین، م. مولدن، اس. موزر، م. موزر، E. ریزساختار یک نقشه فضایی در قشر آنتورینال. طبیعت 2005 ، 436 ، 801-806. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- یان، ایکس. آی، تی. یانگ، م. تانگ، ایکس. لیو، کیو. رویکرد یادگیری عمیق نموداری برای گروهبندی ساختمانهای شهری. Geocarto Int. 2020 ، 8 ، 1-24. [ Google Scholar ] [ CrossRef ]
- لی، ز. Huang, P. اقدامات کمی برای اطلاعات مکانی نقشه ها. بین المللی جی. جئوگر. Inf. علمی 2002 ، 16 ، 699-709. [ Google Scholar ] [ CrossRef ]
- Mackaness، WA; بورگارد، دی. Duchêne, C. تعمیم نقشه. در دایره المعارف بین المللی جغرافیا: مردم، زمین، محیط زیست و فناوری ؛ Richardson, D., Castree, N., Goodchild, MF, Kobayashi, A., Liu, W., Marston, RA, Eds. John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2017. [ Google Scholar ] [ CrossRef ]
- بوفه، ا. Serra, SR شناسایی ساختارهای فضایی در بلوک های شهری برای توصیف شهر. در مجموعه مقالات بیستمین کنفرانس بین المللی کارتوگرافی، پکن، چین، 6 اوت 2001; صفحات 1974-1983. [ Google Scholar ]
- چودری، او. Mackaness، W. شناسایی خودکار مرزهای سکونتگاه شهری برای پایگاههای اطلاعاتی چندگانه. محاسبه کنید. محیط زیست سیستم شهری 2008 ، 32 ، 95-109. [ Google Scholar ] [ CrossRef ]
- لیو، ی. مارتین، ام. مننو جان، ک. مدل ارزیابی تشابه معنایی در تعمیم پایگاه داده طبقهای. در مجموعه مقالات سمپوزیوم نظریه جغرافیایی، پردازش و کاربردها، اتاوا، ON، کانادا، 9 تا 12 ژوئیه 2002. [ Google Scholar ]
- ژو، Q. مطالعه تطبیقی رویکردها برای تعیین مناطق ساخته شده با استفاده از داده های شبکه راه. ترانس. GIS 2015 ، 19 ، 848-876. [ Google Scholar ] [ CrossRef ]
- لی، ی. سان، س. جی، ایکس. خو، ال. لو، سی. ژائو، ی. تعریف مرزهای منطقه ساخته شده شهری بر اساس مسیرهای تاکسی: مطالعه موردی پکن. J. Geovisualization Spat. مقعدی 2020 ، 4 ، 8. [ Google Scholar ] [ CrossRef ]
- بورگارد، دی. اشتاینیگر، اس. استفاده از تحلیل مؤلفه اصلی در فرآیند تعمیم خودکار. در مجموعه مقالات بیست و دومین کنفرانس بین المللی کارتوگرافی، لاکرونیا، اسپانیا، 9 تا 16 ژوئیه 2005; انجمن بین المللی کارتوگرافی (ICA): لاکرونیا، اسپانیا، 2005. [ Google Scholar ]
- دو، اس. لو، ال. کائو، ک. Shu, M. استخراج الگوهای ساختمان با پارتیشن نمودار چندسطحی و گروه بندی ساختمان. Isprs J. Photogramm. Remote Sens. 2016 ، 122 ، 81-96. [ Google Scholar ] [ CrossRef ]
- چودری، او. Mackaness، W. تجسم سکونتگاه ها در مورد تغییرات بزرگ در مقیاس. در مجموعه مقالات هشتمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، لاکرونیا، اسپانیا، 9 تا 16 ژوئیه 2005. [ Google Scholar ]
- جیانگ، بی. لیو، ایکس. مقیاسبندی فضای جغرافیایی از دیدگاه بلوکهای شهری و میدانی و استفاده از اطلاعات جغرافیایی داوطلبانه. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 215-229. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اسمیت، ب. در مورد ترسیم خطوط روی نقشه. در نظریه اطلاعات فضایی، مجموعه مقالات COSIT ’95 برلین/هایدلبرگ/وین/نیویورک/لندن/توکیو، وین، اتریش، 21-23 سپتامبر 1995 . Frank, AU, Kuhn, W., Mark, D., Eds. Springer: برلین/هایدلبرگ، آلمان، 1995; صص 475-484. [ Google Scholar ]
- سیلورمن، تخمین چگالی BW برای آمار و تجزیه و تحلیل داده ها . چپمن و هال: نیویورک، نیویورک، ایالات متحده آمریکا، 1986. [ Google Scholar ]
- Thurstain-Goodwin، MT; Unwin, D. تعریف و ترسیم نواحی مرکزی شهرها برای پایش آماری با استفاده از نمایش های سطحی پیوسته. ترانس. GIS 2000 , 4 , 305-317. [ Google Scholar ] [ CrossRef ]
- بوروسو، جی. تراکم شبکه و تعیین حدود مناطق شهری. ترانس. GIS 2003 ، 7 ، 177-191. [ Google Scholar ] [ CrossRef ]
- Borruso، G. برآورد تراکم شبکه: یک رویکرد GIS برای تجزیه و تحلیل الگوهای نقطه در فضای شبکه. ترانس. GIS 2010 ، 12 ، 377-402. [ Google Scholar ] [ CrossRef ]
- جیا، تی. جیانگ، بی. اندازه گیری پراکندگی شهری بر اساس گره های عظیم خیابان ها و مفهوم بدیع شهرهای طبیعی. arXiv 2011 ، arXiv:1010.0541. سند WWW. در دسترس آنلاین: https://arxiv.org/ftp/arxiv/papers/1010/1010.0541.pdf (دسترسی در 10 اکتبر 2021).
- Tversky، A. ویژگی های مشابهت. روانی Rev. 1977 , 84 , 327-352. [ Google Scholar ] [ CrossRef ]
- هولت، الف. تشابه فضایی و GIS: گروه بندی انواع فضایی. در مجموعه مقالات یازدهمین کنفرانس سالانه مرکز تحقیقات اطلاعات فضایی، دوندین، نیوزلند، 13 تا 15 دسامبر 1999. [ Google Scholar ]
- پوپر، KR منطق کشف علمی ; هاچینسون: لندن، بریتانیا، 1972; 480p [ Google Scholar ]
- آی، تی. که، اس. یانگ، م. Li, J. تولید پاکت و سادهسازی چند خطوط با استفاده از مثلثسازی Delaunay. بین المللی جی. جئوگر. Inf. علمی 2017 ، 31 ، 297-319. [ Google Scholar ] [ CrossRef ]
- آرکین، ای.ام. جویدن، LP; Huttenlocher، DP; Kedem، K. میچل، JSB یک متریک قابل محاسبه کارآمد برای مقایسه اشکال چند ضلعی. IEEE Trans. الگوی مقعدی ماخ هوشمند 1991 ، 13 ، 209-216. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سمال، ع. ست، اس. Cueto، K. یک رویکرد مبتنی بر ویژگی برای ترکیب منبع جغرافیایی. بین المللی جی. جئوگر. Inf. علمی 2004 ، 18 ، 459-489. [ Google Scholar ] [ CrossRef ]
- فرانک، آر. استر، M. اندازه گیری شباهت کمی برای نقشه ها. در حال پیشرفت در مدیریت داده های مکانی ; Riedl, A., Kainz, W., Elmes, GA, Eds. Springer: برلین، آلمان، 2006; صص 435-450. [ Google Scholar ]
- Goodchild، MF; Hunter، GJ یک اندازه گیری دقت موقعیتی ساده برای ویژگی های خطی. بین المللی جی. جئوگر. Inf. علمی 1997 ، 11 ، 299-306. [ Google Scholar ] [ CrossRef ]
- Winecoff، AA; Brasoveanu، F. Casavant، B. کاربران در حلقه: یک رویکرد آگاهانه روانشناختی برای بازیابی موارد مشابه. در مجموعه مقالات سیزدهمین کنفرانس ACM در مورد سیستمهای توصیهکننده، کپنهاگ، دانمارک، 16 تا 20 سپتامبر 2019. [ Google Scholar ]
- وانگ، ز. مولر، جی.-سی. تعمیم خط بر اساس تجزیه و تحلیل ویژگی های شکل. کارتوگر. Geogr. Inf. سیستم 1998 ، 25 ، 3-15. [ Google Scholar ] [ CrossRef ]
- رودریگز، MA ارزیابی تشابه معنایی در بین کلاسهای موجودیت فضایی. Ph.D. پایان نامه، دانشگاه مین، اورونو، ME، ایالات متحده آمریکا، 2000. [ Google Scholar ]




بدون دیدگاه