

استفاده از بخشبندی معنایی یادگیری عمیق برای استخراج کاربری زمین چالشبرانگیزترین مشکل در تصاویر با وضوح فضایی متوسط است. این به دلیل لایه پیچیدگی عمیق و چندین سطح از مراحل عمیق شبکه پایه است که می تواند باعث ایجاد مشکل تخریب در ویژگی های کاربری کوچک زمین شود. در این مقاله، یک الگوریتم تقسیمبندی معنایی یادگیری عمیق که شامل معماری شبکه تنظیم (LoopNet) و مجموعه داده کاربری زمین است برای طبقهبندی خودکار کاربری زمین با استفاده از تصاویر Landsat 8 پیشنهاد شدهاست. نتایج تجربی نشان میدهد که تقسیمبندی معنایی یادگیری عمیق با استفاده از شبکه پایه (SegNet، U-Net) از الگوریتمهای یادگیری ماشین مبتنی بر پیکسل (MLE، SVM، RF) برای طبقهبندی کاربری زمین بهتر عمل میکند. علاوه بر این، شبکه LoopNet، که شامل یک حلقه کانولوشن و بلوک کانولوشن است، نسبت به سایر شبکه های پایه (SegNet، U-Net، PSPnet) و شبکه های بهبود (ResU-Net، DeeplabV3+، U-Net++)، با دقت کلی 89.84٪ و نتایج تقسیم بندی خوب، برتر است. ارزیابی باندهای چند طیفی در مجموعه داده کاربری زمین نشان میدهد که باند 5 از نظر دقت استخراج، با دقت کلی 83.91 درصد، عملکرد خوبی دارد. علاوه بر این، ترکیب باندهای طیفی مختلف (باند 1-باند 7) بالاترین نتیجه دقت (89.84٪) را در مقایسه با باندهای فردی به دست آورد. این نتایج نشاندهنده اثربخشی LoopNet و باندهای چند طیفی برای طبقهبندی کاربری اراضی با استفاده از تصاویر Landsat 8 است. ارزیابی باندهای چند طیفی در مجموعه داده کاربری زمین نشان میدهد که باند 5 از نظر دقت استخراج، با دقت کلی 83.91 درصد، عملکرد خوبی دارد. علاوه بر این، ترکیب باندهای طیفی مختلف (باند 1-باند 7) بالاترین نتیجه دقت (89.84٪) را در مقایسه با باندهای فردی به دست آورد. این نتایج نشاندهنده اثربخشی LoopNet و باندهای چند طیفی برای طبقهبندی کاربری اراضی با استفاده از تصاویر Landsat 8 است. ارزیابی باندهای چند طیفی در مجموعه داده کاربری زمین نشان میدهد که باند 5 از نظر دقت استخراج، با دقت کلی 83.91 درصد، عملکرد خوبی دارد. علاوه بر این، ترکیب باندهای طیفی مختلف (باند 1-باند 7) بالاترین نتیجه دقت (89.84٪) را در مقایسه با باندهای فردی به دست آورد. این نتایج نشاندهنده اثربخشی LoopNet و باندهای چند طیفی برای طبقهبندی کاربری اراضی با استفاده از تصاویر Landsat 8 است.
کلید واژه ها:
یادگیری عمیق تقسیم بندی معنایی ; LoopNet ; لندست 8 ; مجموعه داده کاربری زمین ; استخراج کاربری زمین ; باندهای چند طیفی ; تایلند
1. مقدمه
کاربری زمین و پوشش زمین (LULC) یک مشکل چالش برانگیز برای شناسایی و نظارت به دلیل پیچیدگی LULC، انواع بسیاری از فعالیت های انسانی و تغییرات فصلی است. برای غلبه بر این مشکلات، فناوری سنجش از دور و الگوریتمهای یادگیری ماشین برای تولید نقشههای LULC [ 1 ، 2 ] استفاده میشوند. علاوه بر این، نقشه برداری LULC به روز و دقیق برای برنامه های کاربردی سیستم اطلاعات جغرافیایی (GIS)، برنامه ریزی شهری، و نظارت بر تغییرات پوشش زمین مورد نیاز است [ 3 ، 4 ]]. برای تولید نقشه های LULC، بررسی های زمینی و روش های سنجش از دور به طور سنتی برای طبقه بندی کاربری اراضی استفاده می شود. بررسی های زمینی می تواند نقشه برداری دقیق و دقیق ارائه دهد. با این حال، اندازه گیری در این زمینه زمان بر است و نیاز به هزینه قابل توجهی از منابع و نیروی انسانی دارد. طبقهبندی سنجش از دور که از طبقهبندی مبتنی بر پیکسل و مبتنی بر شی استفاده میکند، میتواند طبقهبندی کاربری اراضی را با دقت بالا ایجاد کند. با این حال، این روش همیشه به داده های نمونه برای آموزش و تنظیم پارامتر نیاز دارد.
بیشتر تصاویر سنجش از دور مورد استفاده برای طبقه بندی کاربری زمین از حسگرهای غیرفعال جمع آوری شده است. چنین حسگرهایی می توانند باندهای چندطیفی یا ابرطیفی تولید کنند که می توانند برای نشان دادن انواع LULC استفاده شوند [ 5 ]. علاوه بر این، تصاویر سنجش از دور دارای انواع مختلفی از وضوح فضایی، از کم تا زیاد است. تصاویر با وضوح فضایی پایین (بیش از 100 متر) برای ضبط داده ها در یک منطقه وسیع خوب است. برای طبقهبندی مبتنی بر پیکسل به منظور طبقهبندی انواع LULC همانطور که در سیستم طبقهبندی سطح 1 LULC برای دادههای سنجش از دور [ 6 ، 7 ] تعریف شده است، مناسب است. تصاویر با وضوح فضایی متوسط (100-100 متر) به طور رایج در طبقهبندی مبتنی بر پیکسل و طبقهبندی مبتنی بر شی استفاده میشوند [ 8 ]]. این وضوح برای طبقه بندی انواع LULC همانطور که در سیستم طبقه بندی سطح 2 LULC [ 9 ] تعریف شده مفید است. با این حال، محدودیتهایی در طبقهبندی ویژگیهای ناهمگن فضایی یا پیچیده انواع LULC دارد. تصاویر با وضوح فضایی بالا (30 سانتی متر تا 10 متر) قادر به طبقه بندی و استخراج ویژگی های پیچیده LULC هستند که در تصاویر با وضوح پایین یا متوسط دیده نمی شوند [ 10 ]. این وضوح دارای پتانسیل بالایی برای طبقه بندی انواع LULC است که در سیستم طبقه بندی سطح 3 LULC [ 11 ] تعریف شده است. این نوع وضوح تصویر بیشتر با پردازش تصویر با استفاده از الگوریتم های یادگیری ماشین طبقه بندی می شوند.
یادگیری ماشین نقش مهمی در طبقه بندی سنجش از دور برای بیش از یک دهه بازی کرده است و عملکرد خوبی را برای طبقه بندی LULC ارائه می دهد. بسیاری از الگوریتمهای یادگیری ماشین، مانند K-نزدیکترین همسایه (KNN)، تخمینگر حداکثر احتمال (MLE)، ماشین بردار پشتیبان (SVM)، جنگل تصادفی (RF)، درخت تصمیم (DT) و غیره، میتوانند برای پیکسلها اعمال شوند. طبقه بندی مبتنی بر و مبتنی بر شی [ 5 ، 8 ]. برای پیاده سازی این الگوریتم ها برای طبقه بندی LULC، علی جمالی، 2019 [ 12] هشت مدل یادگیری ماشین، از جمله پرسپترون چند لایه، لجستیک ساده، J48، IBK تنبل، جنگل تصادفی، درخت تصمیم، DTNB و نمونه های تعمیم یافته غیر تودرتو را برای نقشه برداری LULC با استفاده از Landsat 8 OLI ارزیابی و مقایسه کرد. نتایج نشان می دهد که یادگیری ماشینی می تواند ویژگی های کاربری زمین را به طور دقیق طبقه بندی کند. بعداً، مایانى و همکاران، 2021 [ 13] تکنیکهای یادگیری ماشین، از جمله طبقهبندیکننده جنگل تصادفی، طبقهبندیکننده حداقل فاصله (اقلیدسی)، طبقهبندیکننده تقویت درخت گرادیان، طبقهبندیکننده ساده بیز، و طبقهبندی و طبقهبندی درخت رگرسیون را برای طبقهبندی کاربری زمین با استفاده از تصاویر سنجش از دور نشان داد. نتایج نشان داد که جنگل تصادفی بالاترین دقت را داشت و نسبت به سایر روش ها بهتر بود. با این حال، این الگوریتمها به نمونههای آموزشی و تنظیم دقیق پارامترها برای مدلهای یادگیری نظارت شده نیاز دارند.
اخیراً الگوریتمهای یادگیری عمیق برای طبقهبندی خودکار تصاویر سنجش از دور مورد توجه عملی زیادی قرار گرفتهاند. آنها می توانند مشکلات کلان داده و پیچیدگی ویژگی های کاربری زمین را مدیریت کنند. این الگوریتمها برای طبقهبندی تصویر و تقسیمبندی اشیا اعمال شدهاند و برای چندین کاربرد سنجش از دور بسیار موفق بودهاند [ 14 ]. یک بررسی جامع از طبقه بندی تصاویر سنجش از دور بر اساس CNN ها برای طبقه بندی کاربری زمین توسط Song و همکاران، 2019 [ 15 ] انجام شد. نتایج نشان داد که با استفاده از الگوریتمهای یادگیری عمیق، طبقهبندی کاربری بهتر زمین به دلیل بهبود مدل CNN که از نظر نحوه اجرای وظایف طبقهبندی تصویر ارائه میشود. بعدها، آلم و همکاران، 2020، [ 16] روش های یادگیری عمیق را برای طبقه بندی LULC بر اساس تصاویر سنجش از دور توضیح داد. مطالعه آنها کاربردها و روش های یادگیری عمیق، از جمله شبکه عصبی کانولوشن (CNN)، شبکه متخاصم مولد (GAN) و شبکه عصبی تکراری (RNN) را بررسی کرد. با تجزیه و تحلیل این تحقیق، آنها دریافتند که یادگیری عمیق برای تصاویر سنجش از دور برای طبقه بندی LULC کافی است و بهتر است. علاوه بر این، ولی و همکاران، 2020 [ 17] یادگیری عمیق را برای طبقه بندی کاربری زمین و پوشش زمین با استفاده از یک حسگر غیرفعال با تصاویر چند طیفی و ابرطیفی بررسی کرد. آنها نشان دادند که یادگیری عمیق با تصاویر سنجش از دور شامل تعداد زیادی چالش فنی است که با کاربردهای سنجش از دور همراه است. علاقه فزاینده ای به برنامه های کاربردی تجاری قابل دوام، کمبود حقیقت زمینی، پردازش داده های روی برد، رشد سریع حجم داده ها و محدودیت های حافظه وجود دارد. مقاله مروری آنها تأیید کرد که مدلهای یادگیری عمیق چالش برانگیز، قابلیت روشهای طبقهبندی را که میتوانند در برنامههای LULC اعمال شوند، بررسی و بهبود میبخشد. با توسعه طبقه بندی LULC، Kussul و همکاران، 2017 [ 18] یک معماری یادگیری عمیق چندسطحی برای پردازش تصویر با استفاده از تصاویر Landsat 8 و Sentinel 1A ارائه کرد. نتیجه تحقیقات آنها عملکرد بهتر CNN 2D را در دقت کلی نسبت به روشهای جنگل تصادفی، مجموعه پرسپترون چندلایه و 1D-CNN نشان داد. استوری و هنری، 2018 [ 19 ] شبکه های عصبی یادگیری عمیق (شبکه FCN-8 و VGG-16) را برای تجزیه و تحلیل انواع LULC با استفاده از Landsat 5 و Landsat 7 مورد بررسی قرار دادند. نتایج نشان دهنده دقت متوسط بالا و تولید سریع نقشه کاربری زمین بود. بعدها، آخسان و همکاران، 2020 [ 20] یک چارچوب یادگیری عمیق را برای نقشه برداری LULC با استفاده از تصاویر ماهواره ای چند طیفی ارزیابی کرد. آنها مدلهای مختلفی از تعدیل معماری FCN، مانند FCN-VGG16، FCN-ResNet-101، FCN-GoogLeNet، و دو پسوند (یک ماژول زمینه و یک شبکه متخاصم) را برای ارزیابی عملکرد طبقهبندی کاربری زمین به کار بردند. مقایسه نشان داد که FCN-ResNet-101 و دو افزونه بالاترین عملکرد را در مقایسه با مدلهای دیگر داشتند. غربیا و همکاران، 2021 [ 21] یک شبکه عصبی پیچیده عمیق برای طبقه بندی پوشش زمین پیشنهاد کرد. این تحقیق AlexNet و مدل VGG-16 را برای طبقه بندی طبقات پوشش زمین مانند آب، شهری، کشاورزی، جاده و بیابان با استفاده از مجموعه داده Landsat ارزیابی کرد. نتایج نشان داد که مدل VGG-16 نسبت به مدل AlexNet با دقت بالا و نتایج طبقه بندی خوب برتری دارد. سان و همکاران، 2020 [ 22] یک شبکه عصبی عمیق (DNN) را با طبقهبندی پیکسلی برای طبقهبندی انواع محصولات بر روی دادههای سنجش از راه دور مانند جو، سویا، ذرت، گندم بهاره، لوبیا خشک، یونجه و چغندرقند بررسی کرد. نتایج نشان داد که تکنیک یادگیری عمیق می تواند در طبقه بندی نوع محصول با دقت کلی بالا به خوبی عمل کند. برای بهبود عملکرد یک الگوریتم یادگیری عمیق برای ارائه طبقهبندی LULC، چندین محقق یک روش ترکیبی را پیشنهاد کردهاند. ژانگ و همکاران، 2019 [ 23 ] یک مدل یادگیری عمیق مشترک را پیشنهاد کردند که پرسپترون چندلایه (MLP) و CNN را برای طبقهبندی کاربری زمین بر روی تصاویر با وضوح فضایی بالا ترکیب میکرد. نتیجه نشان می دهد که این روش ترکیبی می تواند به دقت کلی بالا و یک نتیجه طبقه بندی دقیق دست یابد. بعدها، روست و همکاران، 2021 [24 ] الگوریتم XGBoost و تکنیک یادگیری عمیق را برای تشخیص و طبقه بندی پوشش زمین با استفاده از تصاویر ماهواره ای SPOT6 نشان داد. نتیجه این روش ترکیبی بهبود در طبقه بندی کاربری اراضی را نشان داد. برای یک مجموعه داده سنجش از دور، هلبر و همکاران، 2019 [ 25 ] یک مجموعه داده جدید به نام EuroSAT و یک روش یادگیری عمیق مبتنی بر وصله برای طبقهبندی کاربری و پوشش زمین با استفاده از تصاویر Sentinel 2 ارائه کردند. روش پیشنهادی دارای بالاترین دقت کلی برای طبقه بندی کاربری اراضی تایید شد. بعداً، ژانگ و همکاران، 2021 [ 26] ویژگی آبشار CNN و طبقهبندی کننده McODM را برای طبقهبندی نقشه کاربری زمین با استفاده از مجموعه داده کاربری UC Merced ارزیابی کرد. این روش ترکیبی بهبود در توانایی یادگیری برای طبقه بندی سطح صحنه با نتیجه بسیار دقیق را نشان داد.
مطالعات طبقهبندی LULC و روشهای تقسیمبندی معنایی یادگیری عمیق یک روند تحقیقاتی به سرعت در حال رشد است. Kotaridis و Lazaridou، 2021 [ 27 ] یک متاآنالیز از تقسیم بندی تصویر سنجش از دور پیشرفته انجام دادند. آنها آمار و داده های کمی را در یک الگوریتم تقسیم بندی تجزیه و تحلیل کردند و به این نتیجه رسیدند که مدل یادگیری عمیق به دلیل ویژگی ها و الگوهای هدف واضح، روی تصاویر با وضوح فضایی بالا به خوبی کار می کند. با این حال، قیمت تصاویر با وضوح فضایی بالا بالا است و فقط یک منطقه کوچک را پوشش می دهد. بنابراین، تصاویر با وضوح فضایی متوسط یک نوع چالش برانگیز از داده ها برای طبقه بندی LULC است. این نوع تصویربرداری محدوده وسیعی را پوشش می دهد و رایگان است که برای نظارت بر کاربری زمین مناسب است. پولیاپرام و همکاران، 2019 [ 28] از یک نوع ساده شده از ساختار U-Net DCNN برای تقسیمبندی ویژگیهای کاربری زمین مانند آب، یخ و زمین بر روی تصاویر ماهوارهای با وضوح متوسط (Landsat 8) استفاده کرد. ساختار پیشنهادی آنها بهتر از U-Net و مدل DeepWaterMap عمل کرد. Mutreha و همکاران، 2020 [ 29 ] طبقه بندی سکونتگاه ها را با روش تقسیم بندی با استفاده از تصاویر Landsat 8 مورد مطالعه قرار دادند. مدل یادگیری عمیق قادر به شناسایی و استخراج سکونتگاه ها با نتایج بسیار دقیق بود. بعداً، دو و همکاران، 2021 [ 30 ] یک مدل تقسیمبندی معنایی عمیق برای طبقهبندی و نقشهبرداری برنج برنج با استفاده از دادههای چند زمانی از تصاویر Landsat پیادهسازی کردند. نشان داده شد که مدل تقسیمبندی میتواند شالیزار برنج را در مناطق بزرگ به دقت تقسیم کند. پریرا و همکاران، 2021 [ 31] یک مجموعه داده در مقیاس بزرگ برای تشخیص آتش فعال از Landsat 8 و شبکه U-Net ارائه کرد. الگوریتمها عملکرد بهتری در تقسیمبندی آتش فعال داشتند. علاوه بر این، وانگ و همکاران، 2022 [ 32] یک رویکرد تقسیمبندی معنایی یادگیری عمیق را مطالعه کرد که از یک شبکه مجموعهای برای استخراج کاربری زمین با استفاده از Sentinel 2A و Gaofen PMS استفاده کرد. نتایج نشان داد که معماری U-Net++ با ستون فقرات Timm-RegNetY-320 بالاترین عملکرد را در مقایسه با ستون فقرات دیگر (VGG-16، EfficientNet-b7، ResNEt50 و Timm-ResNet101) به دست آورد. بر اساس ادبیات، ظرفیت بهبود یافته تقسیمبندی LULC نشان میدهد که بخشبندی معنایی یادگیری عمیق پتانسیل شناسایی و استخراج تنوع و پیچیدگی ویژگیهای کاربری زمین را به دقت دارد. با این حال، ویژگیهای کاربری زمین بیش از تصاویر با وضوح فضایی متوسط، ویژگیهای سطح متوسطی دارند، و معماریهای شبکه پایه که برای مدل یادگیری نظارتشده استفاده میشوند، دارای لایههای پیچیده پیچیده و عمیق برای یادگیری بر روی دادههای چند بعدی هستند. بدین ترتیب،
بنابراین، هدف این تحقیق پیشنهاد یک تقسیمبندی معنایی یادگیری عمیق برای تقسیمبندی LULC با استفاده از تصاویر Landsat 8 است. نوآوری و مشارکت تحقیقاتی ما استفاده از تقسیمبندی خودکار کاربری زمین با استفاده از یک الگوریتم یادگیری عمیق بر روی دادههای منبع باز است. معماری شبکه تنظیم، که از یک حلقه کانولوشن، بلوک پیچیدگی و سه سطح مراحل عمیق تشکیل شده است، برای یادگیری و استخراج انواع ویژگیهای کاربری زمین از تصاویر با وضوح فضایی متوسط طراحی شده است. سپس، پیشنهاد میشود از مجموعه داده کاربری اراضی متشکل از پنج کلاس اصلی شامل پسزمینه، آب، کشاورزی، شهری، متفرقه و جنگل برای ارزیابی عملکرد تقسیمبندی کاربری اراضی با استفاده از تصاویر Landsat 8 استفاده شود. علاوه بر این،
2. مواد و روشها
این تحقیق یک تقسیم بندی خودکار LULC را با استفاده از تصاویر Landsat 8 بررسی می کند. مجموعه داده کاربری زمین برای مدل یادگیری نظارت شده استفاده می شود. باندهای چند طیفی برای عملکرد آنها در شناسایی انواع LULC ارزیابی می شوند. علاوه بر این، یک شبکه تنظیم برای یادگیری پیچیدگی الگوها و ویژگیهای کاربری زمین پیشنهاد شده است و با معماری پیشرفته شبکه برای تقسیمبندی معنایی مقایسه میشود. عملکرد شبکه پیشنهادی با استفاده از روش های ارزیابی دقت محاسبه می شود. این بخش جزئیات مجموعه داده کاربری زمین، معماری شبکه پیشنهادی و الگوریتمهای ارزیابی دقت را ارائه میکند.
2.1. مجموعه داده کاربری زمین
منطقه مورد مطالعه در تایلند است و بازتاب طیفی و ویژگیهای بافتی انواع کاربری زمین در هر فصل دارد. به عنوان مثال، جنگل هر فصل دارای گیاهان مختلف به وفور است، رشد شهرها سال به سال افزایش مییابد، بدنههای آبی در فصل بارندگی گسترش مییابند، کشاورزی فعالیت کاشت را دارد که از تقویم زراعی پیروی میکند و غیره. بنابراین، دیدگاههای چندگانه از ویژگیهای کاربری اراضی وجود دارد. برای مدل یادگیری نظارت شده مورد نیاز است. برای انواع کاربری زمین در تایلند، همانطور که توسط بخش توسعه زمین در سال 2021 گزارش شده است [ 33]، شش طبقه اصلی وجود دارد: زمین شهری و ساخته شده (UB). زمین کشاورزی (AC)، که شامل شالیزار، محصولات زراعی، چندساله، باغات میوه، باغبانی، کشت سوئید، مرتع و مزرعه، گیاهان آبزی، زمین های آبزی پروری، و مزارع یکپارچه/تنوع می شود. زمین جنگلی (FR)، که شامل جنگل های آشفته و جنگل های انبوه است. بدنه های آبی (WT)؛ زمین های متفرقه (MC)، که شامل سایر زمین های متفرقه، مرداب ها و باتلاق ها می شود. و پس زمینه (BG). بیشترین پوشش LULC 54 درصد است که زمین کشاورزی است. زمین های جنگلی با 34 درصد در رتبه بعدی قرار دارند. انواع دیگر شامل 5٪ برای زمین های ساخته شده، 4٪ برای زمین های متفرقه، و 3٪ برای بدنه های آبی است.
این مجموعه داده کاربری زمین، انواع LULC را با استفاده از تصاویر Landsat 8 ارائه می کند. داده ها از یک سنسور تصویربرداری زمین عملیاتی نصب شده بر روی ماهواره لندست 8 جمع آوری شد. 16 روز در یک چرخه تکراری برای جمع آوری داده ها در همان منطقه وجود دارد. ماهواره بازتاب طیفی را با طول موج های طیفی مختلف در یازده باند جمع آوری می کند. هفت باند از بخشهای مادون قرمز مرئی، مادون قرمز نزدیک و موج کوتاه طیف ثبت شدهاند که دارای 30 متر وضوح فضایی در امتداد یک نوار 185 کیلومتری هستند. اینها شامل باند 1 (0.43-0.45 میکرومتر)، باند 2 (0.450-0.51 میکرومتر)، باند 3 (0.53-0.59 میکرومتر)، باند 4 (0.64-0.67 میکرومتر)، باند 5 (0.85-0.88 میکرومتر)، باند 6 ( 1.57-1.65 میکرومتر) و باند 7 (2.11-2.29 میکرومتر). این باندهای طیفی برای مجموعه داده کاربری زمین انتخاب شدند. نمونه هایی برای مجموعه داده کاربری زمین در تایلند از سال 2020 تا 2022 جمع آوری شد.شکل 1 الف. تعداد کل تصاویر استفاده شده در این مجموعه داده 50 صحنه بود. هر تصویر دارای اندازه پیکسل 7591 × 7761 در عرض و ارتفاع است، همانطور که در شکل 1 ب نشان داده شده است.
با توجه به آماده سازی مجموعه داده کاربری زمین، تصاویر Landsat 8 بریده شد و به تصاویر با اندازه 480 × 480 پیکسل تقسیم شد، که اندازه مناسب برای نمونه های داده برای تغذیه در معماری شبکه است. یک مجموعه نمونه شامل هفت باند تصویر (باند 1 تا باند 7) و یک تصویر برچسبدار بود. این تحقیق تصاویر برچسب گذاری شده شامل شش طبقه معنایی پس زمینه، جنگل، آب، شهری، متفرقه و کشاورزی را حاشیه نویسی می کند. این کلاس ها مربوط به LULC سطح 1 از USGS است. مجموعه نمونه داده ها در شکل 2 نشان داده شده است . تعداد کل مجموعه های نمونه 13600 مجموعه بود. این مجموعههای نمونه به سه گروه به نامهای گروه آموزشی، گروه اعتبارسنجی و گروه آزمایش تقسیم شدند که در جدول 1 نشان داده شده است.
2.2. معماری شبکه پیشنهادی
2.2.1. بلوک پیچیدگی
این بلوک کانولوشن یک الگوریتم ویژگی یادگیری را ارائه می دهد که شامل لایه کانولوشن، نرمال سازی دسته ای و تابع فعال سازی است. لایه پیچیدگی ویژگی های اساسی را با مجموعه ای از بانک های فیلتر می آموزد، سپس نرمال سازی دسته ای نقشه ویژگی را استاندارد می کند تا فرآیند یادگیری را تثبیت کند و تعداد دوره های آموزشی را کاهش دهد. تابع فعال سازی مقدار خروجی کانولوشن را تعیین می کند و مقدار را با طول خاص تطبیق می دهد. این بلوک کانولوشن از دو مجموعه کانولوشن تشکیل شده است. هر مجموعه شامل یک لایه کانولوشن، یک لایه عادی سازی دسته ای و یک تابع فعال سازی است. ساختار پیچیدگی در شکل 3 نشان داده شده است .
2.2.2. حلقه پیچیدگی
حلقه پیچیدگی یادگیری ویژگی ها در ابعاد مختلف ویژگی را پیشنهاد می کند. این الگوریتم از یک لایه کانولوشن، یک لایه max-pooling و یک لایه upsamp تشکیل شده است. ساختار در شکل 4 نشان داده شده است. در این فرآیند، ورودی به لایه کانولوشن ریخته می شود. خروجی برای کاهش اندازه ویژگی به الگوریتم max-pooling ارسال می شود. لایه های کانولوشن دارای بانک های فیلتر فزاینده ای هستند که برای توانایی یادگیری اعمال می شوند. الگوریتم upsampling برای نقشه ویژگی نمونه برداری شده برای دستیابی به اندازه ویژگی هدف استفاده می شود. تابع الحاق بین اولین لایه کانولوشن و لایه upsampling ترکیب می شود. خروجی به آخرین لایه کانولوشن در حلقه کانولوشن ارسال می شود. نتیجه آخرین لایه پیچیدگی خروجی حلقه کانولوشن است.
2.2.3. معماری شبکه پیشنهادی
معماری شبکه پیشنهادی (LoopNet) با هدف تقسیمبندی ویژگیهای کاربری زمین بر روی تصاویر با وضوح فضایی متوسط است. شبکه ماژول های سه سطحی را به ارث می برد تا ویژگی های چند بعدی را بیاموزد و پیچیدگی انواع کاربری زمین را تقسیم بندی کند. معماری شبکه از چهار الگوریتم تشکیل شده است: بلوک کانولوشن، حلقه کانولوشن، الگوریتم حداکثر ادغام و الگوریتم upsampling، همانطور که در شکل 5 نشان داده شده است.. داده های ورودی که دارای 480 × 480 پیکسل با اندازه ویژگی است، به اولین لایه کانولوشن تغذیه می شود و با مجموعه ای از بانک های فیلتر پیچیده می شود. خروجی به بلوک کانولوشن در ماژول سطح اول منتقل می شود. بلوک کانولوشن ویژگی های شی را با استفاده از الگوریتم کانولوشن می آموزد و تشخیص می دهد. بعداً، خروجی این بلوک به حلقه کانولوشن تغذیه میشود که برای بهبود توانایی یادگیری در ابعاد مختلف ویژگی با استفاده از الگوریتم ویژگی max-pooling طراحی شده است و یادگیری باقیمانده را با استفاده از تابع الحاق بهینه میکند. برای ماژول سطح دوم، خروجی اولین لایه کانولوشن به الگوریتم max-pooling تغذیه می شود تا نقشه ویژگی را به 240 × 240 پیکسل فشرده کند. این فشرده سازی پارامترهای یادگیری و حافظه مورد نیاز را کاهش می دهد. حلقه های کانولوشن برای ویژگی های یادگیری اعمال می شوند. این سطح شامل سه حلقه کانولوشن، یک تابع الحاق و یک الگوریتم upsampling است. با توجه به فشردهسازی نقشههای ویژگی، مدل میتواند تعداد بانکهای فیلتر را برای بهبود توانایی یادگیری ویژگیهای شی افزایش دهد. بعداً، در ماژول سطح سوم، مدل شامل دو حلقه کانولوشن، یک الگوریتم حداکثر ادغام و یک الگوریتم نمونهبرداری است. خروجی الگوریتم max-pooling در ماژول سطح دوم به لایه اول این ماژول تغذیه می شود. سپس، الگوریتم max-pooling با تغییر اندازه ویژگی های شی به 120 × 120 پیکسل اعمال می شود. خروجی برای یادگیری ویژگی های شی به حلقه کانولوشن تغذیه می شود. تعداد بانک های فیلتر در این لایه پیچشی افزایش یافته است. آخرین لایه ماژول سطح سوم یک الگوریتم نمونه برداری است که نقشه ویژگی را تا دو برابر اندازه آن گسترش می دهد. سپس، نقشه ویژگی به 240 × 240 پیکسل برمی گردد. خروجی ماژول سطح سوم با خروجی حلقه کانولوشن ماژول سطح دوم الحاق می شود. این روش به مدل کمک می کند تا ویژگی های یادگیری را زمانی که در شبکه کانولوشن عمیق گم می شوند، بهینه کند. برای آخرین لایه در ماژول سطح دوم، نقشه ویژگی بر روی یک الگوریتم نمونهبرداری اعمال میشود تا نقشه ویژگی تا 480 × 480 پیکسل بزرگ شود. خروجی با خروجی حلقه کانولوشن در ماژول سطح اول الحاق می شود. این نقشه های ویژگی از طریق دو بلوک کانولوشن به آخرین لایه این معماری شبکه پیشنهادی می گذرد. طبقهبندیکننده softmax احتمالات کلاس انواع کاربری زمین را بر روی تصاویر با وضوح فضایی متوسط محاسبه میکند. خروجی ماژول سطح سوم با خروجی حلقه کانولوشن ماژول سطح دوم الحاق می شود. این روش به مدل کمک می کند تا ویژگی های یادگیری را زمانی که در شبکه کانولوشن عمیق گم می شوند، بهینه کند. برای آخرین لایه در ماژول سطح دوم، نقشه ویژگی بر روی یک الگوریتم نمونهبرداری اعمال میشود تا نقشه ویژگی تا 480 × 480 پیکسل بزرگ شود. خروجی با خروجی حلقه کانولوشن در ماژول سطح اول الحاق می شود. این نقشه های ویژگی از طریق دو بلوک کانولوشن به آخرین لایه این معماری شبکه پیشنهادی می گذرد. طبقهبندیکننده softmax احتمالات کلاس انواع کاربری زمین را بر روی تصاویر با وضوح فضایی متوسط محاسبه میکند. خروجی ماژول سطح سوم با خروجی حلقه کانولوشن ماژول سطح دوم الحاق می شود. این روش به مدل کمک می کند تا ویژگی های یادگیری را زمانی که در شبکه کانولوشن عمیق گم می شوند، بهینه کند. برای آخرین لایه در ماژول سطح دوم، نقشه ویژگی بر روی یک الگوریتم نمونهبرداری اعمال میشود تا نقشه ویژگی تا 480 × 480 پیکسل بزرگ شود. خروجی با خروجی حلقه کانولوشن در ماژول سطح اول الحاق می شود. این نقشه های ویژگی از طریق دو بلوک کانولوشن به آخرین لایه این معماری شبکه پیشنهادی می گذرد. طبقهبندیکننده softmax احتمالات کلاس انواع کاربری زمین را بر روی تصاویر با وضوح فضایی متوسط محاسبه میکند. این روش به مدل کمک می کند تا ویژگی های یادگیری را زمانی که در شبکه کانولوشن عمیق گم می شوند، بهینه کند. برای آخرین لایه در ماژول سطح دوم، نقشه ویژگی بر روی یک الگوریتم نمونهبرداری اعمال میشود تا نقشه ویژگی تا 480 × 480 پیکسل بزرگ شود. خروجی با خروجی حلقه کانولوشن در ماژول سطح اول الحاق می شود. این نقشه های ویژگی از طریق دو بلوک کانولوشن به آخرین لایه این معماری شبکه پیشنهادی می گذرد. طبقهبندیکننده softmax احتمالات کلاس انواع کاربری زمین را بر روی تصاویر با وضوح فضایی متوسط محاسبه میکند. این روش به مدل کمک می کند تا ویژگی های یادگیری را زمانی که در شبکه کانولوشن عمیق گم می شوند، بهینه کند. برای آخرین لایه در ماژول سطح دوم، نقشه ویژگی بر روی یک الگوریتم نمونهبرداری اعمال میشود تا نقشه ویژگی تا 480 × 480 پیکسل بزرگ شود. خروجی با خروجی حلقه کانولوشن در ماژول سطح اول الحاق می شود. این نقشه های ویژگی از طریق دو بلوک کانولوشن به آخرین لایه این معماری شبکه پیشنهادی می گذرد. طبقهبندیکننده softmax احتمالات کلاس انواع کاربری زمین را بر روی تصاویر با وضوح فضایی متوسط محاسبه میکند. نقشه ویژگی برای بزرگنمایی نقشه ویژگی تا 480 × 480 پیکسل بر روی یک الگوریتم نمونهبرداری اعمال میشود. خروجی با خروجی حلقه کانولوشن در ماژول سطح اول الحاق می شود. این نقشه های ویژگی از طریق دو بلوک کانولوشن به آخرین لایه این معماری شبکه پیشنهادی می گذرد. طبقهبندیکننده softmax احتمالات کلاس انواع کاربری زمین را بر روی تصاویر با وضوح فضایی متوسط محاسبه میکند. نقشه ویژگی برای بزرگنمایی نقشه ویژگی تا 480 × 480 پیکسل بر روی یک الگوریتم نمونهبرداری اعمال میشود. خروجی با خروجی حلقه کانولوشن در ماژول سطح اول الحاق می شود. این نقشه های ویژگی از طریق دو بلوک کانولوشن به آخرین لایه این معماری شبکه پیشنهادی می گذرد. طبقهبندیکننده softmax احتمالات کلاس انواع کاربری زمین را بر روی تصاویر با وضوح فضایی متوسط محاسبه میکند.
2.3. آموزش
مدل یادگیری نظارت شده برای بخشبندی معنایی یادگیری عمیق با استفاده از معماری شبکه پیشنهادی و معماریهای شبکه پیشرفته استفاده شد. تمرین با وزنه در لایه های کانولوشن توسط تابع بهینه سازی آدام در الگوریتم پس انتشار بهینه شد. بهترین هایپرپارامترهای هر مدل یادگیری تحت نظارت، هایپرپارامترهای SegNet، PSPnet و DeeplabV3+، برای نرخ یادگیری 0.001، برای تکانه 0.999 و برای کاهش وزن 0.0001 تنظیم شدند. برای U-Net، ResU-Net و U-Net++، هایپرپارامترها برای نرخ یادگیری 0.0001، برای تکانه 0.99 و برای کاهش وزن 0.0001 تنظیم شدند. LoopNet فراپارامترها را 0.0001 برای نرخ یادگیری، 0.999 برای تکانه و 0.00001 برای کاهش وزن قرار داده است. هر شبکه اندازه گام یادگیری را در هر 1000 تکرار تنظیم می کند. تعداد دوره ها 100 و اندازه دسته 10 تعریف شد. نرمال سازی دسته ای و تابع انصراف در مدل به منظور جلوگیری از برازش بیش از حد و عدم تناسب استفاده شد. تکنیک های مرحله اولیه و رگرسیون لجستیک منظم L2 برای تابع هزینه استفاده شد. تعادل وزن در تابع کاهش استفاده شد تا اطمینان حاصل شود که همه کلاس ها به طور مساوی در حل داده های آموزشی نامتعادل مشارکت دارند. الگوریتم یادگیری عمیق بر اساس کتابخانه Tensorflow نسخه 2.4 با پایتون نسخه 3.9 بر روی محاسبات با کارایی بالا Chalawan ارائه شده توسط سازمان NARIT در تایلند پیاده سازی شد. تکنیک های مرحله اولیه و رگرسیون لجستیک منظم L2 برای تابع هزینه استفاده شد. تعادل وزن در تابع کاهش استفاده شد تا اطمینان حاصل شود که همه کلاس ها به طور مساوی در حل داده های آموزشی نامتعادل مشارکت دارند. الگوریتم یادگیری عمیق بر اساس کتابخانه Tensorflow نسخه 2.4 با پایتون نسخه 3.9 بر روی محاسبات با کارایی بالا Chalawan ارائه شده توسط سازمان NARIT در تایلند پیاده سازی شد. تکنیک های مرحله اولیه و رگرسیون لجستیک منظم L2 برای تابع هزینه استفاده شد. تعادل وزن در تابع کاهش استفاده شد تا اطمینان حاصل شود که همه کلاس ها به طور مساوی در حل داده های آموزشی نامتعادل مشارکت دارند. الگوریتم یادگیری عمیق بر اساس کتابخانه Tensorflow نسخه 2.4 با پایتون نسخه 3.9 بر روی محاسبات با کارایی بالا Chalawan ارائه شده توسط سازمان NARIT در تایلند پیاده سازی شد.
2.4. معیارهای ارزیابی
معیارهای دقت کمی مانند دقت کلی، میانگین تقاطع بیش از اتحاد، تقاطع در هر کلاس بیش از اتحادیه، دقت، و یادآوری، برای ارزیابی عملکرد مدل یادگیری نظارت شده استفاده شد. ارزیابی دقت در سه مرحله انجام شد. اولین قدم ارزیابی فرآیند یادگیری در طول مدل آموزشی بود. مرحله دوم آزمایش روش یادگیری در طول تکرار آن برای اعتبارسنجی مجموعههای نمونه بود. مرحله سوم عملکرد مدل یادگیری تحت نظارت را با مجموعه نمونه آزمایشی ارزیابی کرد. دقت کلی عملکرد مدل یادگیری تحت نظارت را نشان می دهد. مجموع تقسیم بندی های مثبت واقعی و منفی واقعی تقسیم بر مجموع تقسیم بندی های مثبت واقعی، منفی درست، مثبت کاذب و منفی کاذب را محاسبه می کند. تقاطع میانگین روی اتحادیه (mIoU) دقت بین نقشه تقسیم بندی و حقیقت زمین را نشان می دهد. این نسبت بین تقاطع همه پیکسلهای تقسیمبندی شده به درستی تقسیم بر اتحاد همه پیکسلهای تقسیمبندی صحیح و همه پیکسلهای تقسیمبندی نادرست را ارزیابی میکند. تقاطع هر کلاس بر اتحادیه، نسبت کلاس هدف بین تقاطع پیکسلهای تقسیمبندی شده صحیح بر اتحادیه پیکسلهای تقسیمبندی صحیح و همه پیکسلهای تقسیمبندی نادرست را محاسبه میکند. دقت، نسبت مقدار مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر مثبت کاذب را محاسبه می کند. یادآوری نسبت مقادیر مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر منفی کاذب را اندازه گیری می کند. این نسبت بین تقاطع همه پیکسلهای تقسیمبندی شده به درستی تقسیم بر اتحاد همه پیکسلهای تقسیمبندی صحیح و همه پیکسلهای تقسیمبندی نادرست را ارزیابی میکند. تقاطع هر کلاس بر اتحادیه، نسبت کلاس هدف را بین تقاطع پیکسلهای تقسیمبندی صحیح تقسیم بر اتحادیه پیکسلهای تقسیمبندی صحیح و همه پیکسلهای تقسیمبندی نادرست محاسبه میکند. دقت، نسبت مقدار مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر مثبت کاذب را محاسبه می کند. یادآوری نسبت مقادیر مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر منفی کاذب را اندازه گیری می کند. این نسبت بین تقاطع همه پیکسلهای تقسیمبندی شده به درستی تقسیم بر اتحاد همه پیکسلهای تقسیمبندی صحیح و همه پیکسلهای تقسیمبندی نادرست را ارزیابی میکند. تقاطع هر کلاس بر اتحادیه، نسبت کلاس هدف را بین تقاطع پیکسلهای تقسیمبندی صحیح تقسیم بر اتحادیه پیکسلهای تقسیمبندی صحیح و همه پیکسلهای تقسیمبندی نادرست محاسبه میکند. دقت، نسبت مقدار مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر مثبت کاذب را محاسبه می کند. یادآوری نسبت مقادیر مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر منفی کاذب را اندازه گیری می کند. تقاطع هر کلاس بر اتحادیه، نسبت کلاس هدف را بین تقاطع پیکسلهای تقسیمبندی صحیح تقسیم بر اتحادیه پیکسلهای تقسیمبندی صحیح و همه پیکسلهای تقسیمبندی نادرست محاسبه میکند. دقت، نسبت مقدار مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر مثبت کاذب را محاسبه می کند. یادآوری نسبت مقادیر مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر منفی کاذب را اندازه گیری می کند. تقاطع هر کلاس بر اتحادیه، نسبت کلاس هدف را بین تقاطع پیکسلهای تقسیمبندی صحیح تقسیم بر اتحادیه پیکسلهای تقسیمبندی صحیح و همه پیکسلهای تقسیمبندی نادرست محاسبه میکند. دقت، نسبت مقدار مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر مثبت کاذب را محاسبه می کند. یادآوری نسبت مقادیر مثبت واقعی تقسیم بر مجموع مقادیر مثبت واقعی و مقادیر منفی کاذب را اندازه گیری می کند.
3. آزمایش ها و تجزیه و تحلیل
3.1. طرح های آزمایشی
پس از تقسیمبندی خودکار کاربری زمین توسط یادگیری عمیق، این تحقیق یک مجموعه داده کاربری زمین را از تصاویر Landsat 8 ایجاد میکند و معماری شبکه پیشنهادی (LoopNet) را برای یک مدل یادگیری نظارت شده پیادهسازی میکند. به منظور غلبه بر محدودیتهای عملکرد تقسیمبندی کاربری زمین، ارزیابی در سه آزمایش تنظیم شده است. آزمایش اول عملکرد بخشبندی معنایی یادگیری عمیق و طبقهبندی مبتنی بر پیکسل را توسط الگوریتمهای یادگیری ماشین ارزیابی میکند. آزمایش دوم عملکرد شبکه پیشنهادی را با دیگر معماریهای شبکه پیشرفته از جمله SegNet، U-Net، ResU-Net، U-Net++، PSPnet و DeeplabV3+ مقایسه میکند. چندین معیار عملکرد برای این مقایسه ها استفاده می شود. آزمایش سوم عملکرد مجموعه داده کاربری زمین را ارزیابی می کند.
3.2. آزمایش 1: مقایسه طبقهبندی مبتنی بر پیکسل و تقسیمبندی معنایی یادگیری عمیق برای طبقهبندی کاربری زمین
این آزمایش عملکرد طبقهبندی کاربری زمین یادگیری ماشین مبتنی بر پیکسل و بخشبندی معنایی را از طریق یادگیری عمیق مقایسه میکند. جدول 2 ارزیابی دقت و شکل 6 را فهرست می کندنتایج استخراج را نشان می دهد. نتایج الگوریتم های یادگیری ماشین مبتنی بر پیکسل نشان می دهد که الگوریتم جنگل تصادفی به 74.69% دقت کلی و 26.14% mIoU دست می یابد. این عملکرد از نظر دقت کلی به ترتیب حدود 1.83% و 6.57% از الگوریتم ماشین بردار پشتیبان و الگوریتم تخمین حداکثر درستنمایی بالاتر است. در مقابل، بخشبندی معنایی یادگیری عمیق، تقسیمبندی کاربری زمین را پیشنهاد میکند. شبکه های پایه مانند SegNet و U-Net در این ارزیابی استفاده می شوند. نتایج نشان می دهد که مدل یادگیری نظارت شده با استفاده از معماری SegNet دارای 84.13% دقت کلی و 54.20% mioU است که دقت بالاتری نسبت به معماری U-Net دارد. در نتیجه، مقایسه بین یادگیری ماشین مبتنی بر پیکسل و تقسیمبندی معنایی یادگیری عمیق نشان میدهد که الگوریتم یادگیری عمیق نسبت به طبقهبندی مبتنی بر پیکسل برتری دارد. دقت کلی، mIoU، دقت و یادآوری نتایج دقت بالاتری نسبت به روشهای مبتنی بر پیکسل نشان میدهد. از نظر دقت IoU در هر کلاس، بالاترین عملکرد برای الگوریتم یادگیری عمیق SegNet است که با 66.55 درصد در کشاورزی، 61.05 درصد در جنگل، 30.27 درصد در متفرقه، 61.53 درصد در شهری و 53.74 درصد در آب است. این سطوح دقت بالاتر از روش جنگل تصادفی است که 73.65 درصد در کشاورزی، 55.56 درصد در جنگل، 18.47 درصد در متفرقه، 33.64 درصد در شهری و 69.72 درصد در آب دارد. از نظر دقت IoU در هر کلاس، بالاترین عملکرد برای الگوریتم یادگیری عمیق SegNet است که با 66.55 درصد در کشاورزی، 61.05 درصد در جنگل، 30.27 درصد در متفرقه، 61.53 درصد در شهری و 53.74 درصد در آب است. این سطوح دقت بالاتر از روش جنگل تصادفی است که 73.65 درصد در کشاورزی، 55.56 درصد در جنگل، 18.47 درصد در متفرقه، 33.64 درصد در شهری و 69.72 درصد در آب دارد. از نظر دقت IoU در هر کلاس، بالاترین عملکرد برای الگوریتم یادگیری عمیق SegNet است که با 66.55 درصد در کشاورزی، 61.05 درصد در جنگل، 30.27 درصد در متفرقه، 61.53 درصد در شهری و 53.74 درصد در آب است. این سطوح دقت بالاتر از روش جنگل تصادفی است که 73.65 درصد در کشاورزی، 55.56 درصد در جنگل، 18.47 درصد در متفرقه، 33.64 درصد در شهری و 69.72 درصد در آب دارد.
مقایسه تصاویر طبقهبندی بین یادگیری ماشین مبتنی بر پیکسل و تقسیمبندی معنایی یادگیری عمیق نشان میدهد که تقسیمبندی معنایی یادگیری عمیق عملکرد بهتری نسبت به روش مبتنی بر پیکسل دارد. برای الگوریتم تخمین حداکثر احتمال، نتایج طبقهبندی کمترین عملکرد را در بین روشهای مبتنی بر پیکسل نشان میدهد، که نشاندهنده سردرگمی در طبقهبندی بین کلاسهای شهری و متفرقه و همچنین خطاهای طبقهبندی در کلاسهای متفرقه و آب است، همانطور که در شکل 6 a,c نشان داده شده است. برآورد حداکثر احتمال). علاوه بر این، الگوریتم ماشین بردار پشتیبان عملکرد مناسبی در روشهای مبتنی بر پیکسل دارد. همانطور که در شکل 6 نشان داده شده است، بین طبقات کشاورزی و آب اشتباهات طبقه بندی وجود داردa (ماشین بردار پشتیبانی). همانطور که در شکل 6 b,c (ماشین بردار پشتیبانی) نشان داده شده است، فاقد توانایی طبقه بندی در کلاس جنگل است . الگوریتم جنگل تصادفی عملکرد بهتری نسبت به الگوریتمهای طبقهبندی قبلی برای طبقهبندی کاربری اراضی دارد، اگرچه اشتباهات طبقهبندی در منطقه کشاورزی وجود دارد که طبق شکل 6 a (جنگل تصادفی) طبقهبندی آب را اشتباه طبقهبندی میکند. علاوه بر این، شکل 6ج (جنگل تصادفی) فقدان طبقه بندی در کشاورزی و طبقات متفرقه را نشان می دهد. در مورد عملکرد طبقه بندی مبتنی بر پیکسل، می توان دریافت که خطاهای زیادی در طبقه بندی وجود دارد، مانند نویز فلفل و خطاهای طبقه بندی. با این حال، بخشبندی معنایی یادگیری عمیق، که یک الگوریتم یادگیری ویژگی است، میتواند انواع کاربری زمین را شناسایی و استخراج کند. تقسیم بندی با معماری های شبکه پایه مانند SegNet و U-Net نتایج نسبتا خوبی را برای تقسیم بندی کاربری زمین ارائه می دهد، همانطور که در شکل 6 a-d نشان داده شده است (SegNet، U-Net). معماری SegNet در شناسایی و استخراج طبقات زمین شهری و کشاورزی بهتر است. با این حال، برای کلاس های متفرقه و جنگل وجود ندارد، و رودخانه باریک را حذف می کند، همانطور که در شکل 6 نشان داده شده است.a–c (SegNet). معماری U-Net در کلاسهای جنگل و آب بهتر از SegNet عمل میکند، اگرچه در کلاسهای شهری و متفرقه دارای خطاهایی است، همانطور که در شکل 6 a-c (U-Net) نشان داده شده است. نتایج در شکل 6 نشان می دهد که رویکرد تقسیم بندی معنایی یادگیری عمیق نسبت به طبقه بندی مبتنی بر پیکسل برای طبقه بندی کاربری اراضی برتری دارد.
3.3. آزمایش 2: ارزیابی شبکه پیشنهادی و معماری شبکه پیشرفته برای تقسیم بندی کاربری زمین
این آزمایش عملکرد معماری شبکه پیشنهادی (LoopNet) را با معماریهای شبکه پیشرفته برای استخراج کاربری زمین با استفاده از تصاویر Landsat 8 ارزیابی میکند. جدول 3 ارزیابی دقت و شکل 7 را فهرست می کندنتایج استخراج را نشان می دهد. بهترین عملکرد برای تقسیمبندی کاربری زمین، LoopNet است که 89.84 درصد دقت کلی دارد. دقت کلی شبکه پیشنهادی نسبت به دیگر معماریهای شبکه به میزان 2.1% نسبت به U-Net++، 3.4% نسبت به ResU-Net، 3.62% نسبت به DeeplabV3+، 5.71% نسبت به SegNet، 5.72% نسبت به PSPnet و 7.91% نسبت به U- بالاتر است. خالص. با توجه به عملکرد دقت و فراخوانی، LoopNet با دقت 87.88 درصد و فراخوانی 87.81 درصد از شبکه های دیگر بهتر عمل می کند که در حدود 0.11 درصد در دقت و 0.09 درصد در فراخوان، DeeplabV3+ حدود 0.73 درصد و در دقت 71.0 درصد بالاتر از U-Net++ است. فراخوانی و PSPnet حدود 1.63 درصد در دقت و 1.59 درصد در فراخوان. کمترین عملکرد در دقت و یادآوری SegNet با 84.18 درصد در دقت و 84.10 درصد در فراخوان است. برای تقاطع میانگین روی اتحاد، که اثربخشی کلی استخراج شکل ویژگی را نشان می دهد، بالاترین دقت برای LoopNet با 71.69% mioU یافت می شود. نتایج تقسیم بندی LoopNet نسبت به U-Net++ با حدود 4.82 درصد، DeeplabV3+ با حدود 5.52 درصد، ResU-Net با حدود 5.94 درصد، U-Net با حدود 6.6 درصد، SegNet با حدود 7.49 درصد، و PSPnet با حدود 9.76 درصد دقیق تر است. ٪. برای دقت تقسیم بندی در هر کلاس، همانطور که در هر کلاس IoU ذکر شده است، در کلاس کشاورزی، بالاترین IoU LoopNet با 75.70 درصد است که از U-Net++ حدود 1.95 درصد و DeeplabV3+ با حدود 3.57 درصد دقیق تر است. کمترین IoU مربوط به SegNet با 66.55 درصد است. برای کلاس جنگل، بالاترین IoU LoopNet با 73.41 درصد است که از U-Net++ با حدود 1.96 درصد، DeeplabV3+ با حدود 3.63 درصد و ResU-Net با حدود 4.47 درصد بالاتر است. کمترین عملکرد در کلاس جنگل U-Net با 58.85٪ از IoU است. برای کلاس متفرقه، بهترین عملکرد LoopNet با 40.19 درصد است، پس از آن ResU-Net با 37.21 درصد و U-Net++ با 35.58 درصد قرار دارند. کمترین عملکرد U-Net است که دارای IoU 30.75 درصد است. در مورد IoU برای کلاس شهری، بالاترین دقت نتایج DeeplabV3+ با 46.60 درصد، LoopNet با 43.12 درصد و U-Net++ با 42.07 درصد است. کمترین دقت نتایج PSPnet با 28.30 درصد و U-Net با 22.75 درصد است. برای تقسیمبندی آب، بالاترین عملکرد تقسیمبندی برای LoopNet با 65.95 درصد مشاهده میشود که نسبت به U-Net++ حدود 4.14 درصد و DeeplabV3+ با حدود 5.17 درصد بالاتر است. کمترین عملکرد در تقسیم بندی آب مربوط به SegNet با 53.74 درصد است. با توجه به نتایج IoU به ازای هر کلاس، میتوان مشاهده کرد که LoopNet بهترین عملکرد را در تقسیمبندی کاربری اراضی به دست میآورد و بالاترین تقسیمبندی را برای پسزمینه، کشاورزی، جنگل،
با توجه به نتایج تقسیمبندی، یادگیری عمیق نشان میدهد که میتواند نوع کاربری زمین را به دقت شناسایی و استخراج کند. برای شبکه پایه، SegNet، یک تقسیم بندی دقیق ارائه می دهد، اگرچه فاقد توانایی یادگیری و استخراج ویژگی های شی کوچک مانند مناطق شهری کوچک و رودخانه های باریک، همانطور که در شکل 7 a-c (SegNet) نشان داده شده است. شبکه پایه دیگر، که مبتنی بر U-Net است، استخراج بهتری را برای کلاس جنگل نشان می دهد، همانطور که در شکل 7 b (U-Net) نشان داده شده است. با این حال، همانطور که در شکل 7 a,c (U-Net) نشان داده شده است، دقت کمتری نسبت به SegNet برای کلاس کاربری زمین شهری دارد. شبکه PSPnet قابلیت تقسیم بندی منصفانه را نشان می دهد، اگرچه ویژگی های شی کوچک را حذف می کند و دارای خطاهای تقسیم بندی برای ویژگی های شهری است، همانطور که در نشان داده شده است.شکل 7 a-c (PSPnet). برای شبکه های بهبود یافته، معماری ResU-Net تقسیم بندی بهتری را برای انواع کاربری زمین انجام می دهد. با این حال، همانطور که در شکل 7 a,c (ResU-Net) نشان داده شده است، برای کلاس متفرقه دقت کمتری دارد. معماری U-Net++ دارای قابلیت تقسیم بندی خوبی است، اگرچه دارای خطاهای استخراج برای مناطق رودخانه و جنگل است، همانطور که در شکل 7 b,c نشان داده شده است (U-Net++). عملکرد این شبکه مشابه شبکه DeeplabV3+ است. اگرچه این شبکه می تواند انواع کاربری های زمین را شناسایی و استخراج کند، اما خطاهایی در ویژگی های اشیای کوچک در طبقات کشاورزی و شهری وجود دارد، همانطور که در شکل 7 نشان داده شده است.a,c (DeeplabV3+). معماری LoopNet در تقسیم بندی کاربری اراضی نسبت به سایر معماری ها بهتر عمل می کند و به تقسیم بندی بهتری نسبت به سایر معماری های شبکه دست می یابد. LoopNet می تواند طبقات شهری، کشاورزی و جنگل را به طور دقیق تقسیم بندی کند، همانطور که در شکل 7 a-d (LoopNet) نشان داده شده است. با این حال، عملکرد آن برای کلاسهای متفرقه و آب به دلیل ویژگیهای پیچیده زمینهای متفرقه و تودههای آبی کوچک، از جمله رودخانهها و برکهها، ضعیف است.
3.4. آزمایش 3: ارزیابی باندهای طیفی برای تقسیم بندی کاربری زمین
این آزمایش اثربخشی باندهای چندطیفی Landsat 8 را برای تقسیمبندی کاربری زمین ارزیابی میکند. نتایج دقت عملکرد در جدول 4 نشان داده شده است و نتایج تقسیم بندی کاربری اراضی را در شکل 8 نشان می دهد.. این باندهای طیفی بازتاب طیفی متفاوتی را برای ویژگیهای جسم نشان میدهند. مقایسه نشان میدهد که بهترین باند طیفی برای تقسیمبندی کاربری زمین، باند 5 است که دارای 83.91 درصد دقت کلی، 83.98 درصد دقت و 83.86 درصد یادآوری است. دقت کلی بالاتری نسبت به 0.51 درصد باند 4، 0.71 درصد باند 3، 1.32 درصد از باند 6، 2.05 درصد از باند 7، 6.59 درصد از باند 1 و 9.13 درصد از باند 2 دارد. با توجه به تقسیم بندی نتایج در mIoU بیشترین تقسیم بندی مربوط به باند 6 با 54.96 درصد است که از باند 7 حدود 0.18 درصد، باند 2 حدود 0.23 درصد، باند 3 با حدود 2.51 درصد، باند 4 با حدود 3.22 درصد، باند 5 با حدود 3.29 درصد دقیق تر است. ٪، و باند 1 با حدود 4.73٪. وقتی به IoU هر کلاس برای کلاس کشاورزی نگاه می کنیم، بهترین باند Band 4 است که 67.85٪ دارد. این بیشتر از باند 7 حدود 0.92٪، باند 5 با حدود 1.01٪، باند 3 با حدود 1.67٪ است. باند 6 حدود 2.51 درصد، باند 1 با حدود 3.68 درصد و باند 2 با حدود 5.52 درصد. برای کلاس جنگل، بالاترین IoU Band 6 با 66.04٪ است. کمترین باند 2 با 48.65 درصد.
سایر نتایج برای IoU عبارتند از Band 4 با 65.58 درصد، باند 5 با 63.54 درصد، باند 7 با 62.77 درصد، باند 1 با 49.76 درصد و باند 2 با 48.65 درصد. در کلاس متفرقه، باند با بهترین عملکرد باند 7 با 35.23 درصد است که دقت بیشتری نسبت به باند 2 حدود 1.49 درصد، باند 5 حدود 2.93 درصد، باند 3 با حدود 4.15 درصد، باند 6 با حدود 4.63 درصد دارد. ، باند 4 با حدود 5.08٪ و باند 1 با حدود 7.21٪. برای کلاس شهری، بهترین باند باند 2 با 62.91 درصد است، که تقسیم بندی دقیق تری نسبت به باند 7 با حدود 0.5 درصد، باند 6 با حدود 3.95 درصد، باند 4 با حدود 7.95 درصد، باند 5 با حدود 8.22 درصد، باند 3 ارائه می دهد. با حدود 8.35 درصد و باند 1 با حدود 14.12 درصد. در نهایت، برای کلاس آب، بهترین باند برای تقسیم بندی آب، باند 5 با 58.86 درصد، باند 6 با 58.49 درصد، باند 4 با 56.53 درصد، باند 7 با 50.89 درصد، باند 3 با 46.16 درصد، باند 1 با 38.57 درصد است. ، و باند 2 با 35.81 درصد. به طور خلاصه بهترین باندهای با بالاترین عملکرد در هر کلاس عبارتند از: باند ۵ در کلاس کشاورزی، باند ۶ در کلاس جنگل، باند ۷ در کلاس متفرقه، باند ۲ در کلاس شهری و باند ۵ در کلاس آب. با توجه به عملکرد هر باند طیفی برای تشخیص و استخراج ویژگیهای کاربری اراضی، ترکیب هفت باند با 89% دقت کلی و 71.69% mIoU بالاترین عملکرد را نشان میدهد و بهترین دقت را در IoU هر کلاس با 75.70% به دست میآورد. در کلاس کشاورزی، 73.41 درصد در طبقه جنگل، 40.19 درصد در طبقه متفرقه، 73.12 درصد در طبقه شهری و 65.95 درصد در کلاس آب. باند ۷ در کلاس متفرقه، باند ۲ در کلاس شهری و باند ۵ در کلاس آب. با توجه به عملکرد هر باند طیفی برای تشخیص و استخراج ویژگیهای کاربری اراضی، ترکیب هفت باند با 89% دقت کلی و 71.69% mIoU بالاترین عملکرد را نشان میدهد و بهترین دقت را در IoU هر کلاس با 75.70% به دست میآورد. در کلاس کشاورزی، 73.41 درصد در طبقه جنگل، 40.19 درصد در طبقه متفرقه، 73.12 درصد در طبقه شهری و 65.95 درصد در کلاس آب. باند ۷ در کلاس متفرقه، باند ۲ در کلاس شهری و باند ۵ در کلاس آب. با توجه به عملکرد هر باند طیفی برای تشخیص و استخراج ویژگیهای کاربری اراضی، ترکیب هفت باند با 89% دقت کلی و 71.69% mIoU بالاترین عملکرد را نشان میدهد و بهترین دقت را در IoU هر کلاس با 75.70% به دست میآورد. در کلاس کشاورزی، 73.41 درصد در طبقه جنگل، 40.19 درصد در طبقه متفرقه، 73.12 درصد در طبقه شهری و 65.95 درصد در کلاس آب.
با توجه به نتیجه تقسیم بندی، باند 1 خطاهای تقسیم بندی را در کلاس آب نشان می دهد، همانطور که در شکل 8 a,d (B1) نشان داده شده است. آب در مناطق کشاورزی تقسیم شده و جنگل در مناطق آبی استخراج می شود. با توجه به نوارهای قابل مشاهده، باند 2 نتایج تقسیم بندی بهتری دارد. مدل می تواند ویژگی های کاربری زمین را به خوبی یاد بگیرد و استخراج کند. اگرچه می تواند خطاهای بخش بندی شده در کلاس آب را کاهش دهد، ویژگی های رودخانه باریک و جنگل در نتایج تقسیم بندی حذف شده اند، همانطور که در شکل 8 a-c (B2) نشان داده شده است. باند 3 نتیجه تقسیم بندی شده را به طور دقیق در کلاس کشاورزی نشان می دهد. این نوار به مدل کمک می کند تا بین ویژگی های آب و کشاورزی تمایز قائل شود. همانطور که در شکل 8 نشان داده شده است، تقسیم بندی بهتری را در مناطق آبی فراهم می کندd (B3). با این حال، ویژگی های شهری خطاهای بیشتری را در این باند نشان می دهد، همانطور که در شکل 8 a (B3) نشان داده شده است. نوار 4 تقسیم بندی دقیق کاربری اراضی را در کلاس آب نشان می دهد، اگرچه دارای خطاهای تقسیم بندی در ویژگی های متفرقه و شهری است، همانطور که در شکل 8 d (B4) نشان داده شده است. با توجه به باندهای مادون قرمز، مادون قرمز نزدیک در باند 5 تقسیم بندی دقیق کاربری زمین را ارائه می دهد. این مدل میتواند ویژگیهای کاربری زمین را یاد بگیرد و طبقات کاربری زمین در جنگل، کشاورزی و مناطق آبی را به خوبی تقسیم کند، همانطور که در شکل 8 نشان داده شده است.a–d (B5). با این حال، این باند محدودیت هایی در شناسایی و استخراج ویژگی های متفرقه دارد. برای مادون قرمز موج کوتاه، Band 6 دارای خطاهای استخراج برای ویژگی های متفرقه است. اگرچه در این مدل یادگیری حذف شده است، این باند قادر است رودخانه های باریک را شناسایی و تقسیم کند، همانطور که در شکل 8 a-c (B6) نشان داده شده است. در نهایت، Band 7 از نظر توانایی آن در تمایز بین ویژگیهای متفرقه و ویژگیهای کشاورزی دارای محدودیتهایی است. رایج ترین خطاهای تقسیم بندی آن برای کلاس های متفرقه، کشاورزی، آب و جنگل است که در شکل 8 نشان داده شده است.a–d (B7). علاوه بر این، باندهای چند طیفی تفاوتهایی را در بازتاب طیفی و ویژگیهای کاربری زمین نشان میدهند که مزایایی برای شناسایی کاربری زمین دارد. برای به دست آوردن مزایای این باندهای طیفی مختلف (باند 1-باند 7)، شکل 8 a-d (B1-B7) عملکرد بهتر تقسیم بندی کاربری زمین را در مقایسه با مدل های یادگیری تحت نظارت آموزش دیده با یک باند نشان می دهد. مدل چند باندی می تواند کلاس های شهری، جنگلی، آب و کشاورزی را با دقت بیشتری شناسایی و استخراج کند. با این حال، کلاس متفرقه با توجه به تقسیم بندی ویژگی های پیچیده یک محدودیت باقی می ماند.
4. بحث
با توجه به ارزیابیها و مقایسههای فوق، مشخص شد که یک الگوریتم تقسیمبندی معنایی یادگیری عمیق میتواند برای شناسایی و استخراج ویژگیهای کاربری زمین از تصاویر با وضوح فضایی متوسط استفاده شود. الگوریتم های یادگیری ماشین مبتنی بر پیکسل (تخمین حداکثر احتمال، ماشین بردار پشتیبان، جنگل تصادفی)، که روش های طبقه بندی آماری هستند، اطلاعات طیفی را در نظر می گیرند. الگوریتم های طبقه بندی در هر پیکسل نتایج طبقه بندی منصفانه ای را ارائه می دهند. این الگوریتم ها می توانند ویژگی های کاربری زمین را طبقه بندی کنند. با این حال، آنها خطاهای طبقه بندی را هنگام برخورد با ویژگی های طیفی نامشخص و پیچیده نشان می دهند. علاوه بر این، نتایج به شدت تحت تأثیر اثرات نمک و فلفل قرار دارند. متقابلا، الگوریتمهای یادگیری عمیق میتوانند از مجموعه داده کاربری زمین برای یادگیری ویژگیها و الگوهای کاربری زمین از دیدگاههای متعدد استفاده کنند. در ارزیابی عملکرد یادگیری عمیق، مدلهای نظارت شده که از معماریهای شبکه پایه SegNet و U-Net استفاده میکنند، نتایج بهتری در تقسیمبندی کاربری زمین با استفاده از تصاویر با وضوح فضایی متوسط دارند. مدلهای یادگیری تحت نظارت میتوانند با استفاده از تصاویر Landsat 8 ویژگیهای کاربری متوسط و پیچیده را بیاموزند، سپس به طور خودکار کلاسهای کاربری زمین را شناسایی و استخراج کنند. مرز مشخص ویژگی های کاربری اراضی تقسیم بندی خوبی را با شکل مناسب نشان می دهد. با این حال، ویژگیهای شیهای کوچک وقتی به شبکه عمیق وارد میشوند حذف میشوند. مشخص نبودن ویژگیهای کاربری و پیچیدگی انواع پوشش زمین بر خطاهای استخراج تأثیر دارد.
به دلیل خطاهای تقسیم بندی در مراحل عمیق معماری شبکه هنگام استفاده از تصاویر با وضوح فضایی متوسط از Landsat 8، ویژگی های چند سطحی شبکه عصبی کانولوشن ممکن است باعث مشکلات تخریب شوند و تصاویر با وضوح متوسط با سطح متوسطی از ویژگی های شی ظاهر می شوند. بنابراین، حلقه کانولوشن و بلوک پیچیدگی در معماری LoopNet برای تقسیمبندی کاربری اراضی پیشنهاد شدهاند. شبکه پیشنهادی با موفقیت ویژگیهای کاربری زمین را با استفاده از تصاویر Landsat 8 تقسیمبندی میکند، که بخشبندی بهتری از اشکال کاربری زمین را نشان میدهد. مدل یادگیری نظارت شده به 89.84 درصد از دقت کلی و 71.69 درصد از mIoU دست می یابد. اگرچه خطاهای استخراج و طبقه بندی نادرست طبقات کاربری زمین وجود دارد، شبکه پیشنهادی نتایج تقسیم بندی بهتری را در طبقات کاربری زمین با 75.70٪ برای کشاورزی، 73 ایجاد می کند. 41 درصد برای جنگل، 40.19 درصد برای متفرقه، 73.12 درصد برای شهری و 65.95 درصد برای آب. معماری شبکه LoopNet از یک حلقه کانولوشنال به نفع خود در یادگیری ویژگی های کاربری زمین در ابعاد مختلف ویژگی استفاده می کند. مشکلات تخریب را با تغذیه از لایه های کانولوشن عمیق حل می کند. این الگوریتم به مدل کمک می کند تا ویژگی های کاربری زمین را به شکل مناسبی تقسیم کند. بلوک کانولوشن توانایی یادگیری خود را در ویژگی های کاربری زمین نشان می دهد. این مدل را در یادگیری و تمایز ویژگی های کاربری زمین به کلاس های دقیق پشتیبانی می کند. سه سطح گام عمیق در شبکه عصبی کانولوشن برای یادگیری ویژگیهای کاربری زمین در سطح چند بعدی طراحی شدهاند. این از مشکلات تخریب زمانی که ویژگی های کاربری زمین به ویژگی های سطح پایین در پایین شبکه کانولوشن کاهش می یابد، جلوگیری می کند.شکل 7a-d (شبکه پیشنهادی)، LoopNet قادر به شناسایی و استخراج کلاسهای آب، جنگل و کشاورزی است، هرچند محدودیتهایی در تقسیمبندی ویژگیهای پیچیده و نامشخص کلاسهای متفرقه، شهری و کشاورزی نشان میدهد. بدنه رودخانه های باریک در نتایج تقسیم بندی حذف شده اند. علاوه بر این، بر اساس مجموعه داده کاربری زمین، عملکرد معماری شبکه پیشنهادی ارزیابی و با شبکههای پایه (SegNet، U-Net، PSPnet) و شبکههای تنظیم (ResU-Net، DeeplabV3+، U-Net++) مقایسه شده است. با توجه به شبکههای پایه، مدلهای یادگیری نظارتشده مبتنی بر شبکههای SegNet، U-Net و PSPnet برای تقسیمبندی کاربری زمین نسبتاً خوب عمل میکنند، اگرچه خطاهای استخراج در کلاسهای کاربری آب و زمینهای متفرقه وجود دارد. شبکه عصبی کانولوشنال مرحله عمیق (SegNet) و شبکه تجزیه صحنه هرمی (PSPnet) روی ویژگیهای کاربری کوچک و پیچیده زمین عملکرد ضعیفی دارند. شبکه U شکل (U-Net) فاقد توانایی یادگیری ویژگی های شهری است. با توجه به شبکههای تنظیم، U-Net باقیمانده عمیق (ResU-Net) نتایج تقسیمبندی بهتری را در کلاسهای کاربری شهری و آب ایجاد میکند، با این حال، کلاس متفرقه را بیش از حد تقسیم میکند. شبکه های بهبود DeeplabV3 (DeeplabV3+) و U-Net تودرتو (U-Net++) قادر به غلبه بر خطاهای استخراج در کلاس متفرقه هستند. با این حال، عملکرد LoopNet از دیگر معماریهای شبکه در تشخیص و استخراج دقیق ویژگیهای کاربری اراضی فراتر میرود. روی تصاویر با وضوح فضایی متوسط به خوبی کار می کند. طبقات اصلی که ویژگی های واضحی را نشان می دهند، در اشکال دقیق تقسیم بندی می شوند. محدودیت این شبکه در طبقهبندی طبقات کاربری زمین در سیستم طبقهبندی LULC سطوح 2 و 3 است. این به دلیل سطوح پایین ویژگیهای متمایزکننده در زیر کلاسهای کاربری زمین است. سه سطح از مراحل عمیق، GPU مصرف می کنند و توانایی یادگیری ویژگی های چند بعدی را محدود می کنند.
علاوه بر این، بر اساس مجموعه داده کاربری زمین، مقایسه باندهای طیفی با استفاده از شبکه پیشنهادی در شناسایی ویژگیهای کاربری زمین در طول موجهای طیفی مختلف مؤثر است. باند 1 که نوار ساحلی/آئروسل نامیده می شود، بنفش و آبی عمیق را حس می کند. کنتراست بالایی در آب کم عمق و گرد و غبار دارد. نتایج استخراج کاربری منصفانه از زمین را نشان میدهد، اگرچه محدودیتهایی از نظر توانایی آن در تمایز ویژگیهای بین کشاورزی، جنگل و مناطق عمیق آب دارد. برای نوارهای قابل مشاهده (باند 2 (آبی)، باند 3 (سبز) و نوار 4 (قرمز))، باند 2 طول موج آبی را اندازهگیری میکند و ویژگیهای آب را افزایش میدهد. نتایج استخراج، تقسیم بندی بهتری را در کلاس شهری ارائه می دهد. با این حال، عملکرد ضعیف تری در طبقه بندی ویژگی های بافت مشابه در طبقات کشاورزی و جنگل دارد. و همچنین در تمایز مناطق عمیق آب، که همان خطاهایی هستند که در باند 1 دیده می شود. این به دلیل یادگیری آماری بین جنگل و ویژگی های آبی است. باند 3 طول موج سبز را نشان می دهد و بر ویژگی های پوشش گیاهی برای ارزیابی بنیه گیاه تأکید می کند. این باند توانایی یادگیری را برای تمایز ویژگی های سبز بهبود می بخشد و تقسیم بندی خوبی را در کلاس های کشاورزی و جنگل نشان می دهد. باند 4 طول موج قرمز را جمعآوری میکند و بر شیبهای گیاهی و وضعیت کلروفیل گیاه تأکید میکند. ویژگی های فراوان گیاه و مناطق خشک را متمایز می کند. نتایج بر مسائل استخراج آب های عمیق غلبه می کند و نتایج تقسیم بندی دقیق تری را در کلاس های کشاورزی و جنگل ارائه می دهد. با این حال، از نظر توانایی تشخیص و استخراج پیچیدگی ویژگی های متفرقه دارای محدودیت هایی است. برای باندهای مادون قرمز (باند 5 (نزدیک به مادون قرمز)، باند 6 (SWIR) و باند 7 (SWIR))، باند 5 طول موج مادون قرمز نزدیک را اندازه گیری می کند. این نوار ویژگیهای بین پوشش گیاهی، مرزهای آبی و شکلهای زمین را متضاد میکند. نتایج نشاندهنده تقسیمبندی بهتر طبقات کاربری زمین نسبت به سایر باندها، به ویژه برای کلاس آب است. برای شکل کاربری زمین دقیق تر است. با این حال، فاقد استحصال رودخانه باریک است. باند 6 و باند 7 طول موج مادون قرمز موج کوتاه را حس می کنند. آنها نمایش خوبی از مناطق مرطوب و خشک، تنش خشکی گیاه و تضادهای قوی بین سنگ ها و خاک ها را ارائه می دهند و می توانند مناطق سوخته را مشخص کنند. این باندها در طبقات جنگلی و شهری استخراج کاربری خوبی را نشان میدهند، اگرچه دقت کمتری نسبت به باند 5 در تمایز آبنماها دارند و خطاهای استخراج در کلاسهای متفرقه و آب بیشتر است. در نتیجه، مشاهده می شود که هر باند طیفی بازتاب طیفی متفاوتی را برای هر ویژگی کاربری زمین ارائه می دهد. تقسیم بندی، استخراج کاربری زمین را به خوبی انجام می دهد. هر باند طیفی یک نتیجه تقسیم بندی دقیق را در هر کلاس منعکس می کند. عملکرد مدل یادگیری نظارت شده، که تمام باندهای طیفی را اعمال می کند، تقسیم بندی خوبی را برای تمام طبقات کاربری زمین نشان می دهد. این مدل از بازتاب طیفی مختلف برای شناسایی و استخراج دقیق ویژگیهای کاربری زمین بهره میبرد. با این حال، شناسایی ویژگیهای کاربری کوچک و پیچیده یک محدودیت در بخشبندی معنایی یادگیری عمیق با استفاده از تصاویر با وضوح فضایی متوسط است. برای غلبه بر این خطاهای تقسیمبندی، پیچیدگی ویژگیهای کاربری زمین در مجموعه داده کاربری زمین و تعداد بانکهای فیلتر در مدل را میتوان افزایش داد. تقسیم بندی، استخراج کاربری زمین را به خوبی انجام می دهد. هر باند طیفی یک نتیجه تقسیم بندی دقیق را در هر کلاس منعکس می کند. عملکرد مدل یادگیری نظارت شده، که تمام باندهای طیفی را اعمال می کند، تقسیم بندی خوبی را برای تمام طبقات کاربری زمین نشان می دهد. این مدل از بازتاب طیفی مختلف برای شناسایی و استخراج دقیق ویژگیهای کاربری زمین بهره میبرد. با این حال، شناسایی ویژگیهای کاربری کوچک و پیچیده یک محدودیت در بخشبندی معنایی یادگیری عمیق با استفاده از تصاویر با وضوح فضایی متوسط است. برای غلبه بر این خطاهای تقسیمبندی، پیچیدگی ویژگیهای کاربری زمین در مجموعه داده کاربری زمین و تعداد بانکهای فیلتر در مدل را میتوان افزایش داد. تقسیم بندی، استخراج کاربری زمین را به خوبی انجام می دهد. هر باند طیفی یک نتیجه تقسیم بندی دقیق را در هر کلاس منعکس می کند. عملکرد مدل یادگیری نظارت شده، که تمام باندهای طیفی را اعمال می کند، تقسیم بندی خوبی را برای تمام طبقات کاربری زمین نشان می دهد. این مدل از بازتاب طیفی مختلف برای شناسایی و استخراج دقیق ویژگیهای کاربری زمین بهره میبرد. با این حال، شناسایی ویژگیهای کاربری کوچک و پیچیده یک محدودیت در بخشبندی معنایی یادگیری عمیق با استفاده از تصاویر با وضوح فضایی متوسط است. برای غلبه بر این خطاهای تقسیمبندی، پیچیدگی ویژگیهای کاربری زمین در مجموعه داده کاربری زمین و تعداد بانکهای فیلتر در مدل را میتوان افزایش داد. که همه باندهای طیفی را اعمال می کند، تقسیم بندی خوبی را برای تمام طبقات کاربری زمین نشان می دهد. این مدل از بازتاب طیفی مختلف برای شناسایی و استخراج دقیق ویژگیهای کاربری زمین بهره میبرد. با این حال، شناسایی ویژگیهای کاربری کوچک و پیچیده یک محدودیت در بخشبندی معنایی یادگیری عمیق با استفاده از تصاویر با وضوح فضایی متوسط است. برای غلبه بر این خطاهای تقسیمبندی، پیچیدگی ویژگیهای کاربری زمین در مجموعه داده کاربری زمین و تعداد بانکهای فیلتر در مدل را میتوان افزایش داد. که همه باندهای طیفی را اعمال می کند، تقسیم بندی خوبی را برای تمام طبقات کاربری زمین نشان می دهد. این مدل از بازتاب طیفی مختلف برای شناسایی و استخراج دقیق ویژگیهای کاربری زمین بهره میبرد. با این حال، شناسایی ویژگیهای کاربری کوچک و پیچیده یک محدودیت در بخشبندی معنایی یادگیری عمیق با استفاده از تصاویر با وضوح فضایی متوسط است. برای غلبه بر این خطاهای تقسیمبندی، پیچیدگی ویژگیهای کاربری زمین در مجموعه داده کاربری زمین و تعداد بانکهای فیلتر در مدل را میتوان افزایش داد. شناسایی ویژگیهای کاربری کوچک و پیچیده یک محدودیت در بخشبندی معنایی یادگیری عمیق با استفاده از تصاویر با وضوح فضایی متوسط است. برای غلبه بر این خطاهای تقسیمبندی، پیچیدگی ویژگیهای کاربری زمین در مجموعه داده کاربری زمین و تعداد بانکهای فیلتر در مدل را میتوان افزایش داد. شناسایی ویژگیهای کاربری کوچک و پیچیده یک محدودیت در بخشبندی معنایی یادگیری عمیق با استفاده از تصاویر با وضوح فضایی متوسط است. برای غلبه بر این خطاهای تقسیم بندی، پیچیدگی ویژگی های کاربری زمین در مجموعه داده کاربری زمین و تعداد بانک های فیلتر در مدل را می توان افزایش داد.
با توجه به این مقایسهها، تقسیمبندی معنایی یادگیری عمیق با استفاده از معماری LoopNet و مجموعه داده کاربری زمین، عملکرد خوبی را در یادگیری ویژگیهای کاربری زمین از تصاویر Landsat 8 ارائه میکند. علاوه بر این، مدل یادگیری نظارت شده در تشخیص و استخراج طبقات کاربری زمین، همانطور که در جدول 3 و شکل 7 نشان داده شده است، نسبت به سایر معماری های شبکه برتری دارد. همانطور که در جدول 4 و شکل 8 نشان داده شده است، مدل یادگیری نظارت شده که همه باندهای طیفی را اعمال می کند، کارایی ارزیابی دقت و نتایج تقسیم بندی را هنگام استفاده از مجموعه داده کاربری زمین افزایش می دهد .
5. نتیجه گیری ها
این تحقیق تقسیمبندی معنایی یادگیری عمیق را برای شناسایی و استخراج ویژگیهای کاربری زمین با استفاده از تصاویر وضوح فضایی متوسط از ماهواره Landsat 8 پیشنهاد کرد. مجموعه داده کاربری زمین که دارای شش کلاس اصلی (زمینه، کشاورزی، جنگل، متفرقه، شهری و آب) است برای یادگیری الگوها و ویژگی های کاربری زمین در نظر گرفته شده است. معماری LoopNet، که شامل یک حلقه کانولوشن و بلوک کانولوشن است، برای مدل یادگیری نظارت شده پیاده سازی شده است. باندهای طیفی چندگانه برای عملکرد آنها برای افتراق انواع کاربری زمین ارزیابی می شوند. نتایج تجربی نشان میدهد که عملکرد تقسیمبندی معنایی یادگیری عمیق بهتر از یادگیری ماشین مبتنی بر پیکسل است. مدل پیشنهادی میتواند ویژگیهای کاربری اراضی را به دقت شناسایی و استخراج کند. علاوه بر این، معماری شبکه پیشنهادی، LoopNet، عملکرد بهتری نسبت به شبکه پایه و معماری های شبکه بهبود یافته نشان می دهد، همانطور که توسط ارزیابی های دقت و نتایج تقسیم بندی تایید شده است. معماری LoopNet در تقسیم بندی ویژگی های کاربری زمین بهتر است. مدل یادگیری نظارت شده می تواند بین ویژگی های شهری و متفرقه تمایز قائل شود و می تواند یک رودخانه باریک را به دقت تقسیم کند. با توجه به مجموعه داده کاربری زمین، عملکرد باندهای طیفی چندگانه نشان می دهد که باند 5، که داده ها را در طول موج مادون قرمز نزدیک می گیرد، نتایج تقسیم بندی بهتری را نسبت به باندهای دیگر نشان می دهد. علاوه بر این، ترکیب باندهای طیفی متعدد (باند 1-باند 7) به عنوان یک مجموعه نمونه، عملکرد بالایی را با دقت کلی 89.84 درصد و mIoU 71.69 درصد به دست میآورد. به این دلیل، نتیجه گیری می شود که الگوریتم یادگیری عمیق با استفاده از معماری LoopNet و مجموعه داده کاربری زمین می تواند توسط مدل یادگیری نظارت شده برای شناسایی و استخراج ویژگی های کاربری زمین با استفاده از تصاویر با وضوح فضایی متوسط استفاده شود. برای کارهای آینده، تعداد نقاط داده با ویژگیهای کاربری مختلف در مجموعه داده کاربری زمین را میتوان افزایش داد، و دادههای سری زمانی را میتوان برای بهبود دیدگاههای چندگانه از الگوهای کاربری زمین به کار برد.
منابع
- ون لیوون، بی. توبک، ز. کواچ، اف. تکنیکهای یادگیری ماشین برای طبقهبندی کاربری زمین/پوشش زمین تصاویر ماهوارهای نوری با وضوح متوسط با تمرکز بر مناطق غرقشده موقت. جی. محیط زیست. Geogr. 2020 ، 13 ، 43-52. [ Google Scholar ] [ CrossRef ]
- وانگ، جی. برتز، ام. دوان، MAA; دلاور، کارشناسی ارشد یادگیری ماشین در مدلسازی کاربری زمین و تغییر پوشش زمین (LULCC): وضعیت فعلی، چالشها و چشماندازها. علمی کل محیط. 2022 ، 822 ، 153559. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- علادممی، ع. اوکولی، سی جی؛ دارامولا، OE; Akinnusi، SA; آدیران، ای. Olanrewaju، HO; علابی، AO; سلامی، تی جی; Odumosu، J. رابطه متقابل بین LST، NDVI، NDBI، و تغییر پوشش زمین در بخشی از کلانشهر لاگوس، نیجریه. Appl. Geomat. 2022 ، 14 ، 299-314. [ Google Scholar ] [ CrossRef ]
- فتحی زاد، ح. تازه، م. کلانتری، س. شجاعی، س. بررسی تغییرات مکانی و زمانی دمای سطح زمین بر اساس تغییرات کاربری اراضی با استفاده از NDVI در جنوب غرب ایران. جی افر. علوم زمین 2017 ، 134 ، 249-256. [ Google Scholar ] [ CrossRef ]
- ماکارینگ، LS; بولف، ای. Pereira، PRM توسعه در استفاده از زمین و تکنیک های طبقه بندی پوشش زمین در سنجش از دور: یک بررسی. جی. جئوگر. Inf. سیستم 2022 ، 14 ، 1-28. [ Google Scholar ] [ CrossRef ]
- سنف، سی. هاسترت، پ. van der Linden، S. استفاده از سری زمانی MODIS و طبقه بندی جنگل های تصادفی برای نقشه برداری کاربری زمین در جنوب شرق آسیا. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2012، مونیخ، آلمان، 22 تا 27 ژوئیه 2012. صص 6733–6736. [ Google Scholar ]
- Anderson, JR A سیستم طبقه بندی کاربری و پوشش زمین برای استفاده با داده های سنسور از راه دور . دفتر چاپ دولت ایالات متحده: واشنگتن، دی سی، ایالات متحده آمریکا، 1976; جلد 964.
- Qu، La; چن، ز. لی، ام. ژی، جی. Wang, H. بهبود دقت در طبقهبندی lulc مبتنی بر پیکسل و شی با مجموعه دادههای کمکی از موتور Google Earth. Remote Sens. 2021 , 13 , 453. [ Google Scholar ] [ CrossRef ]
- امینی، س. صابر، م. ربیعی دستجردی، ح. همایونی، س. تحلیل کاربری اراضی شهری و تغییر پوشش اراضی با استفاده از طبقهبندی تصادفی جنگل سریهای زمانی لندست. Remote Sens. 2022 , 14 , 2654. [ Google Scholar ] [ CrossRef ]
- دورو، دی سی؛ فرانکلین، SE; Dubé، MG مقایسه تحلیل تصویر مبتنی بر پیکسل و شی با الگوریتمهای یادگیری ماشین انتخاب شده برای طبقهبندی مناظر کشاورزی با استفاده از تصاویر SPOT-5 HRG. سنسور از راه دور محیط. 2012 ، 118 ، 259-272. [ Google Scholar ] [ CrossRef ]
- لی، ام. استین، الف. نقشه برداری کاربری زمین از تصاویر ماهواره ای با وضوح بالا با بهره برداری از آرایش فضایی اشیاء پوشش زمین. Remote Sens. 2020 , 12 , 4158. [ Google Scholar ] [ CrossRef ]
- جمالی، ع. ارزیابی و مقایسه هشت مدل یادگیری ماشین در نقشهبرداری کاربری/پوشش زمین با استفاده از Landsat 8 OLI: مطالعه موردی منطقه شمال ایران. SN Appl. علمی 2019 ، 1 ، 1448. [ Google Scholar ] [ CrossRef ]
- Mayani، MB; Itagi, R. تکنیک های یادگیری ماشین در طبقه بندی پوشش زمین با استفاده از داده های سنجش از دور. در مجموعه مقالات کنفرانس بینالمللی فناوریهای هوشمند 2021 (CONIT)، هابلی، هند، 25 تا 27 ژوئن 2021؛ صص 1-5. [ Google Scholar ]
- زو، XX; تویا، دی. مو، ال. Xia، G.-S. ژانگ، ال. خو، اف. Fraundorfer, F. یادگیری عمیق در سنجش از دور: بررسی جامع و فهرست منابع. IEEE Geosci. سنسور از راه دور Mag. 2017 ، 5 ، 8-36. [ Google Scholar ] [ CrossRef ]
- آهنگ، جی. گائو، اس. زو، ی. Ma, C. بررسی طبقه بندی تصاویر سنجش از دور بر اساس CNN. داده های بزرگ زمین 2019 ، 3 ، 232-254. [ Google Scholar ] [ CrossRef ]
- عالم، ع. کومار، اس. روش های یادگیری عمیق برای طبقه بندی پوشش زمین و کاربری زمین در سنجش از دور: یک بررسی. در مجموعه مقالات هشتمین کنفرانس بین المللی 2020 در مورد قابلیت اطمینان، فناوری اطلاعات و بهینه سازی (روندها و جهت گیری های آینده) (ICRITO)، نویدا، هند، 4 تا 5 ژوئن 2020؛ ص 903-908. [ Google Scholar ]
- ولی، ع. کومایی، اس. Matteucci، M. یادگیری عمیق برای طبقه بندی کاربری زمین و پوشش زمین بر اساس داده های مشاهده زمین ابرطیفی و چندطیفی: یک بررسی. Remote Sens. 2020 , 12 , 2495. [ Google Scholar ] [ CrossRef ]
- کوسول، ن. لاورنیوک، م. اسکاکون، س. Shelestov, A. طبقه بندی یادگیری عمیق پوشش زمین و انواع محصول با استفاده از داده های سنجش از دور. IEEE Geosci. سنسور از راه دور Lett. 2017 ، 14 ، 778-782. [ Google Scholar ] [ CrossRef ]
- داستان، سی دی; Henry, CJ شبکه های عصبی یادگیری عمیق برای نقشه برداری پوشش زمین کاربری زمین. در مجموعه مقالات IGARSS 2018-2018 IEEE بین المللی زمین شناسی و سمپوزیوم سنجش از دور، والنسیا، اسپانیا، 22 تا 27 ژوئیه 2018؛ صص 3445–3448. [ Google Scholar ]
- الحسن، و. هنری، سی. رامانا، اس. استوری، سی. چارچوب یادگیری عمیق برای نقشه برداری و تحلیل کاربری زمین/پوشش زمین با استفاده از تصاویر ماهواره ای چندطیفی. محاسبات عصبی Appl. 2020 ، 32 ، 8529-8544. [ Google Scholar ] [ CrossRef ]
- غربیا، ر. خلیفه، NEM; Hassanien، AE طبقهبندی پوشش زمین با استفاده از شبکههای عصبی کانولوشنال عمیق. در مجموعه مقالات کنفرانس بین المللی طراحی سیستم های هوشمند و برنامه های کاربردی، آنلاین، 12 تا 15 دسامبر 2020؛ ص 911-920. [ Google Scholar ]
- سان، ز. دی، ال. نیش، اچ. Burgess, A. طبقه بندی یادگیری عمیق برای انواع محصولات در داکوتای شمالی. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2020 , 13 , 2200–2213. [ Google Scholar ] [ CrossRef ]
- ژانگ، سی. سارجنت، آی. پان، X. لی، اچ. گاردینر، آ. هار، جی. اتکینسون، PM Joint Deep Learning برای طبقه بندی پوشش زمین و کاربری زمین. سنسور از راه دور محیط. 2019 ، 221 ، 173-187. [ Google Scholar ] [ CrossRef ]
- روست، جی. دسپینوی، م. شیندلر، ک. Mangeas، M. ارزیابی تکنیک های یادگیری عمیق برای طبقه بندی پوشش زمین کاربری اراضی در جنوب کالدونیای جدید. Remote Sens. 2021 , 13 , 2257. [ Google Scholar ] [ CrossRef ]
- هلبر، پی. بیشکه، بی. دنگل، ا. Borth، D. Eurosat: یک مجموعه داده جدید و معیار یادگیری عمیق برای طبقهبندی کاربری و پوشش زمین. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2019 , 12 , 2217–2226. [ Google Scholar ] [ CrossRef ]
- ژانگ، ز. کوی، ایکس. ژنگ، کیو. کائو، جی. طبقه بندی کاربری زمین تصاویر سنجش از دور بر اساس شبکه عصبی کانولوشن. عرب جی. ژئوشی. 2021 ، 14 ، 267. [ Google Scholar ] [ CrossRef ]
- کوتاریدیس، آی. Lazaridou، M. پیشرفت های تقسیم بندی تصویر سنجش از دور: یک متاآنالیز. ISPRS J. Photogramm. Remote Sens. 2021 , 173 , 309–322. [ Google Scholar ] [ CrossRef ]
- پولیاپرام، وی. امام اوغلو، ن. ناکامورا، R. مدل یادگیری عمیق برای طبقه بندی آب/یخ/زمین با استفاده از تصاویر ماهواره ای با وضوح متوسط در مقیاس بزرگ. در مجموعه مقالات IGARSS 2019–2019 IEEE بین المللی زمین شناسی و سمپوزیوم سنجش از دور، یوکوهاما، ژاپن، 28 ژوئیه تا 2 اوت 2019؛ صص 3884–3887. [ Google Scholar ]
- موترجا، جی. کومار، اس. جها، دی. سینگ، آ. سینگ، آر. شناسایی سکونتگاه ها با استفاده از SVM و U-Net. در مجموعه مقالات IGARSS 2020-2020 IEEE بین المللی زمین شناسی و سمپوزیوم سنجش از دور، Waikoloa، HI، ایالات متحده آمریکا، 26 سپتامبر تا 2 اکتبر 2020؛ ص 1217–1220. [ Google Scholar ]
- دو، م. هوانگ، جی. چای، دی. لین، تی. Wei, P. طبقه بندی و نقشه برداری از برنج شلتوک با استفاده از داده های چند زمانی Landsat با یک مدل تقسیم بندی معنایی عمیق. در مجموعه مقالات نهمین کنفرانس بین المللی 2021 در مورد آگرو-ژئوانفورماتیک (آگرو-ژئوانفورماتیک)، شنژن، چین، 26 تا 29 ژوئیه 2021؛ صص 1-6. [ Google Scholar ]
- د آلمیدا پریرا، GH; Fusioka، AM; ناسو، بی تی؛ Minetto، R. تشخیص آتش فعال در تصاویر Landsat-8: مجموعه داده در مقیاس بزرگ و یک مطالعه یادگیری عمیق. ISPRS J. Photogramm. Remote Sens. 2021 , 178 , 171–186. [ Google Scholar ] [ CrossRef ]
- وانگ، ال. وانگ، جی. لیو، ز. ژو، جی. Qin، F. ارزیابی یک مدل یادگیری عمیق برای سنجش از دور چند طیفی استفاده از زمین و طبقه بندی محصولات. Crop J. 2022 , 10 , 1435-1451. [ Google Scholar ] [ CrossRef ]
- اداره توسعه زمین. کاربری زمین 2562-2564. در دسترس آنلاین: https://www1.ldd.go.th/web_OLP/result/landuse2562-2564.htm (در 4 اکتبر 2022 قابل دسترسی است).

شکل 1. ردیف مسیر نزولی Landsat 8 WRS 2 که تایلند ( a ) و هفت باند طیفی Landsat 8 ( b ) را پوشش می دهد.
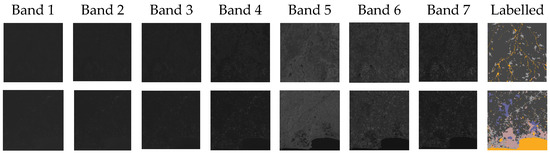
شکل 2. مجموعه های نمونه از مجموعه داده کاربری زمین که بازتاب طیفی مختلف از باند 1 تا باند 7 و تصاویر برچسب گذاری شده را نشان می دهد.
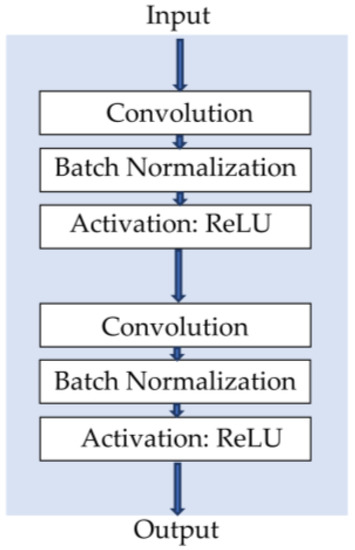
شکل 3. بلوک پیچشی.
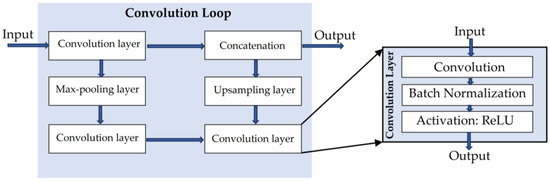
شکل 4. حلقه پیچشی.
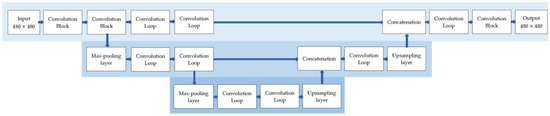
شکل 5. معماری شبکه LoopNet.
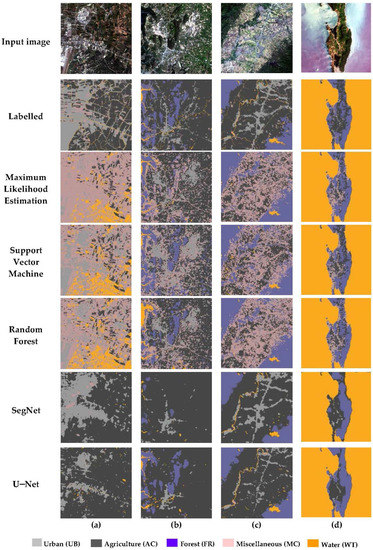
شکل 6. نتایج طبقه بندی و نتایج تقسیم بندی ویژگی های کاربری زمین در مجموعه داده کاربری زمین. الف ) منطقه شهری و کشاورزی؛ ب ) مناطق شهری، کشاورزی و جنگلی در حومه شهر. ج ) مناطق شهری و کشاورزی در دره. د ) مناطق شهری، کشاورزی و جنگلی در جزیره.
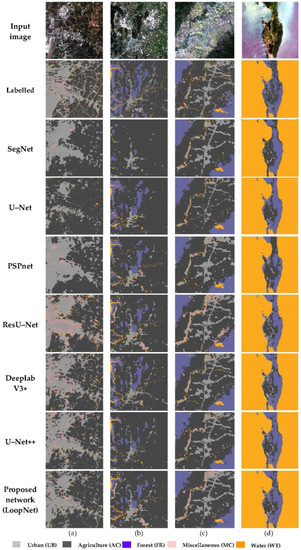
شکل 7. نتایج تقسیم بندی معماری های شبکه بر روی مجموعه داده کاربری زمین. الف ) منطقه شهری و کشاورزی؛ ب ) مناطق شهری، کشاورزی و جنگلی در حومه شهر. ج ) مناطق شهری و کشاورزی در دره. د ) مناطق شهری، کشاورزی و جنگلی در جزیره.
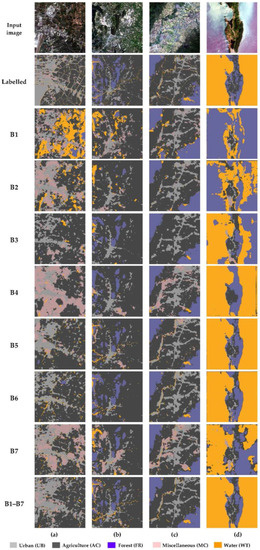
شکل 8. نتایج تقسیم بندی باندهای طیفی در مجموعه داده کاربری زمین. الف ) منطقه شهری و کشاورزی؛ ب ) مناطق شهری، کشاورزی و جنگلی در حومه شهر. ج ) مناطق شهری و کشاورزی در دره. د ) مناطق شهری، کشاورزی و جنگلی در جزیره.


بدون دیدگاه