

خلاصه
مدل فضای داخلی پایه و اساس اکثر خدمات مبتنی بر مکان داخلی (LBS) است. یک مدل فضای داخلی کامل شامل مسیرهای همسطح و مسیرهای غیر همسطح است. دومی شامل گذرگاه هایی است که طبقات یا ارتفاعات مختلف مانند پله ها، آسانسورها، پله های برقی و رمپ ها را به هم متصل می کند. بیشتر مطالعات مرتبط صرفاً در مورد مدلسازی و تولید مسیرهای همسطح بحث کردهاند، در حالی که آنهایی که مسیرهای غیر همسطح را در نظر میگیرند، معمولاً شکلگیری و تولید مسیرهای غیر همسطح، به ویژه پلهها را که نقش مهمی در تخلیه و پاسخ اضطراری دارند، ساده میکنند. اگرچه الگوریتم پیشنهادی با رویکرد i-GIT که مسیرهای هم سطح و هم مسیرهای غیر هم سطح را در نظر می گیرد، می تواند به طور خودکار مسیرهای پله های مستقیم را ایجاد کند. برای پلههای مارپیچ و پلههای بادگیر که در خانههای شهری و سایر ساختمانهای عمومی رایج هستند، کاربرد ندارد. این مطالعه یک رویکرد جدید را برای ایجاد مسیرهای پله با دقت بالا پیشنهاد میکند که میتواند از پلههای مستقیم، مارپیچ و پیچدار پشتیبانی کند. برای پیاده سازی و تأیید الگوریتم پیشنهادی، از 54 پله مستقیم و مارپیچ ارائه شده توسط وب سایت رسمی Autodesk Revit و سه پله بادگیر خودساخته به عنوان موارد آزمایشی استفاده می شود. نتایج آزمون نشان میدهد که الگوریتم میتواند با موفقیت مسیرهای پلکانی اکثر موارد آزمایشی را تولید کند (49/50)، که به طور جامع کاربرد الگوریتم پیشنهادی را گسترش میدهد. 54 پله مستقیم و مارپیچ ارائه شده توسط وب سایت رسمی Autodesk Revit و سه پله بادگیر خود ساخته به عنوان موارد آزمایشی مورد استفاده قرار می گیرند. نتایج آزمون نشان میدهد که الگوریتم میتواند با موفقیت مسیرهای پلکانی اکثر موارد آزمایشی را تولید کند (49/50)، که به طور جامع کاربرد الگوریتم پیشنهادی را گسترش میدهد. 54 پله مستقیم و مارپیچ ارائه شده توسط وب سایت رسمی Autodesk Revit و سه پله بادگیر خود ساخته به عنوان موارد آزمایشی مورد استفاده قرار می گیرند. نتایج آزمون نشان میدهد که الگوریتم میتواند با موفقیت مسیرهای پلکانی اکثر موارد آزمایشی را تولید کند (49/50)، که به طور جامع کاربرد الگوریتم پیشنهادی را گسترش میدهد.
کلید واژه ها:
مدل سازی اطلاعات ساختمان (BIM) ; توپولوژی داخلی ; پله های مارپیچ ; پله های بادگیر ; کلاس های پایه صنعت (IFC)
1. معرفی
همانطور که اطلاعات مکانی به آسانی در دسترس و رایج است، خدمات مبتنی بر مکان (LBS) از فضای باز به داخل گسترش یافته است [ 1 ، 2 ، 3 ، 4 ، 5 ]. به اصطلاح LBS داخلی به خدمات مبتنی بر مکان اشاره دارد که در فضاهای داخلی رخ می دهد [ 4 ]. برنامه های کاربردی که معمولاً دیده می شوند در سه دسته اصلی قرار می گیرند: راهیابی و ردیابی [ 6 ، 7 ، 8 ، 9 ]، مدیریت منابع [ 10 ]، و پاسخ اضطراری [ 11 ، 12 ، 13 ]]. این سرویس ها و برنامه ها بر اساس یک “مدل فضای داخلی” متشکل از مسیرها (یعنی لبه ها) و گره ها هستند [ 14 ]. همچنین دو نوع مسیر وجود دارد، “مسیرهای هم سطح طبقه” و “مسیرهای غیر همسطح”. دومی پله ها، آسانسورها، پله های برقی، رمپ ها و غیره هستند [ 1 ]. برخلاف فضای باز، فضای داخلی نسبتاً بسته، باریک و خصوصی است. ساختار فضا پیچیده است و حرکت در درون به صورت سه بعدی است [ 15 ]. بسیاری از مطالعات مدلهای فضای داخلی متفاوتی را پیشنهاد کردهاند که هر کدام در زمینه کاربردی خود هستند [ 11 ، 12 ، 13 ، 14 ، 15 ، 16 ، 17 ، 18 ، 19 ., 20 , 21 ]. مدلهای مختلف در جنبههایی مانند توپولوژی فضایی، مرجع مکان، دقت مدل، الگوریتم مسیریابی و تجسم مسیر تفاوت دارند [ 15 ]. بنابراین، محققان زیادی نیز در حال مطالعه روشهای تولید برای مدلهای مختلف دادههای مکانی هستند [ 1 ، 5 ، 22 ، 23 ، 24 ، 25 ، 26 ].
در سال های اخیر به دلیل فراوانی حوادث و بلایای تروریستی، مطالعه تخلیه اضطراری از اهمیت ویژه ای برخوردار شده است. بسیاری از محققان راه حل هایی را برای تخلیه اضطراری پیشنهاد کرده اند. لی یک نمایش شبکه ای از یک ساختمان و یک روش نقشه برداری سه بعدی را برای ارائه راهنمایی ناوبری برای پرسنل امداد در زمان اضطراری پیشنهاد کرد [ 11 ]. تشکوری و همکاران آگاهی فضایی مورد نیاز برای یک پاسخ اضطراری موفق را بررسی کرد و یک مدل فضایی اضطراری داخلی را بر اساس کلاسهای بنیاد صنعتی (IFC) معرفی کرد تا درک پاسخ دهندگان از منطقه داخلی، کاهش زمان سفر در داخل خانه، و بهینهسازی مسیریابی در مواقع اضطراری را افزایش دهد [ 12 ]. ]. مدل فضای داخلی دیگری که از مسیریابی و ارزیابی تخلیه پشتیبانی می کند پیشنهاد شد [13 ] با ویژگی که شامل اشیاء فضایی ساکن داخل ساختمان و همچنین اطلاعات پویا مانند ترافیک در فضای باز، گسترش آتش و حرکت پرسنل امداد و نجات است. اگرچه این مطالعات در برنامه ریزی مسیرهای داخلی برای نجات و تخلیه اضطراری موثر بودند، اما نقش مهم پله ها در واکنش اضطراری را با ساده سازی مدل مسیر پله نادیده گرفتند [ 11 ، 12 ، 13 ]. تحقیقات نشان داده است که از آنجایی که پلهها تنها نقاط انتقال عمودی ایمن در مواقع اضطراری مانند آتشسوزی و زلزله هستند، احتمالاً تلفات جانی و مالی در نتیجه ازدحام در راه پله رخ میدهد [ 27 ].]. با این حال، بیشتر تحقیقات بر روی پلان دو بعدی یک ساختمان متمرکز شده است که در آن معابر عمودی و موانع نادیده گرفته می شوند [ 28 ]. محققان استدلال کرده اند که به منظور بهبود کارایی، ظرفیت و ایمنی تخلیه اضطراری داخلی، یک مدل شبیه سازی باید از نظر کمی درست باشد تا با حرکت انسان در دنیای واقعی مطابقت داشته باشد [ 29 ، 30 ، 31 ]. بیشتر مدلهای فضای داخلی، رویکردهای 2.5 بعدی هستند که فضاهای سهبعدی را بهعنوان لایههای چندگانه یک پلان دو بعدی با مسیرهای غیر همسطح مانند آسانسورها و پلهها نشان میدهند که معمولاً به صورت مسیرهای عمودی نشان داده میشوند [ 13 ، 17 ، 18 ، 23 ، 28 .]. این نوع مدل 2.5 بعدی برای کاربردهای واکنش اضطراری مناسب نیست و نیاز فوری به بهبود دارد. با این حال، نه تنها تولید مسیرهای غیرهمسطح با دقت بالا به صورت دستی پرهزینه است، بلکه مستعد خطاهای انسانی است [ 15 ، 32 ].
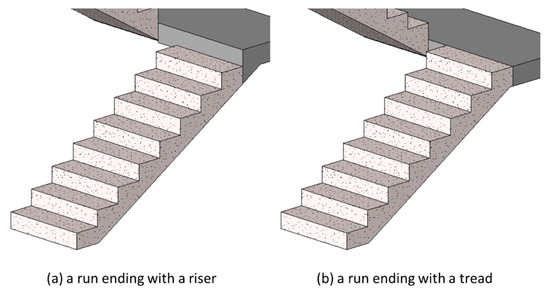
لین و همکاران [ 26 ] یک چارچوب تولید توپولوژی داخلی به نام نسل هوشمند توپولوژی داخلی (i-GIT) پیشنهاد کرد. بر اساس مدلهای IFC، i-GIT میتواند بهطور خودکار شبکههای داخلی سهبعدی شامل مسیرهای سطح و غیرهمسطح بسازد. مسیرهای غیر همسطح شامل پلههای مستقیم [ 1 ، 33 ]، رمپها و آسانسورها [ 34 ] میشود، بنابراین برای آن دسته از LBS داخلی که نیاز به مدل فضای داخلی با دقت بالا، مانند سیستمهای واکنش اضطراری دارند، قابل استفاده است. با این حال، الگوریتم فعلی i-GIT فقط از پله های مستقیم پشتیبانی می کند، همانطور که در سمت چپ شکل 1 نشان داده شده است.، و از پله های مارپیچ و بادگیر که معمولاً در خانه های شهری یا ساختمان های عمومی دیده می شود پشتیبانی نمی کند. این دو نوع پله معمولاً بین دو راه پله ای ندارند. علاوه بر این، نه تنها پله های پله جهت خود را با ارتفاع تغییر می دهند، بلکه شکل و اندازه پله ها نیز ممکن است سازگار نباشد. این ویژگی ها بدون شک دشواری طراحی الگوریتم را افزایش می دهند [ 18 ، 32 ].
این مطالعه یک منطق الگوریتمی کاملاً جدید را پیشنهاد میکند که نه تنها برای همه پلههای مستقیم که توسط الگوریتم i-GIT پشتیبانی میشوند قابل اجرا است، بلکه از دو نوع پلکان جدید، پلههای مارپیچ و بادگیر نیز پشتیبانی میکند. الگوریتم پیشنهادی جدید به میزان قابل توجهی کاربرد خود را برای پله ها بهبود می بخشد. ساختار مقاله زیر به شرح زیر است. بخش 2 مطالعات قبلی مربوط به فضاهای داخلی را با تمرکز بر واکنش اضطراری بررسی میکند، مشکلات و محدودیتهایی را که در تحقیقات موجود در زمینه تولید مسیر پلهها با آن مواجه میشوند، توصیف میکند و در نهایت، به طور خلاصه الگوریتم i-GIT برای تولید مسیر پلهها و کاربردهای آن را شرح میدهد. بخش 3انواع پله ها، تغییرات در ساختار پله ها و پارامترهای مدل سازی مهمی که باید در الگوریتم تولید مسیر پله در نظر گرفته شوند را شرح می دهد. بخش 4 منطق الگوریتمی را معرفی می کند و بخش 5 الگوریتم را با موارد واقعی با جزئیات تأیید می کند. بخش 6 نتیجه گیری و توصیه هایی را برای تحقیقات بعدی ارائه می دهد.
2. آثار مرتبط
2.1. فضاهای داخلی برای واکنش اضطراری
فضای داخلی به عنوان یک محیط بسته که توسط عناصر فیزیکی تشکیل شده است تعریف می شود که در آن فعالیت های انسانی انجام می شود [ 2 ]. برخلاف اشیاء در فضاهای بیرونی که میتوان با سیستم مختصات دو بعدی مطلق ارجاع داد، اشیاء داخلی معمولاً به صورت سه بعدی توصیف میشوند و به صورت نسبی توسط فضاهای داخلی با معنای معنایی، مانند اتاقها، راهروها یا راه پلهها ارجاع میشوند [ 2 ، 4 ]. از آنجایی که تقاضا برای اطلاعات فضایی در مورد فضاهای داخلی در دهه های اخیر افزایش یافته است [ 3 ]، مطالعات زیادی در مورد مدل سازی فضاهای داخلی انجام شده است و می توان آنها را به سه دسته تقسیم کرد: (1) مدل سازی داده های فضاهای داخلی [ 3 ، 21 ] ، (2) نسل مدل های فضای داخلی [22 ، 23 ] و (3) کاربردهای مدل های فضای داخلی [ 21 ]. مطالعات دسته اول بر بیان فضای داخلی با یک مدل داده متمرکز است که به طور مفهومی از برنامه های ایجاد شده توسط مطالعات در دسته سوم پشتیبانی می کند. مطالعات روی تولید مدلهای فضای داخلی با ساخت خودکار یا تولید یک مدل برای استفادههای عملی سروکار دارد.
مطالعات بسیاری مدل های فضای داخلی متفاوتی را پیشنهاد کرده اند. این مدل ها را می توان تقریباً به دو دسته تقسیم کرد: رویکردهای مبتنی بر هندسی و رویکردهای مبتنی بر نمادین [ 14 ].]. رویکردهای مبتنی بر هندسی، که به عنوان رویکردهای متریک یا رویکردهای مبتنی بر مختصات نیز شناخته میشوند، فضای داخلی را به یک شبکه متراکم تقسیم میکنند. هر سلول در این شبکه نشان دهنده موقعیتی در فضای داخلی است. شکل سلول می تواند منظم یا نامنظم باشد. از سوی دیگر، رویکردهای مبتنی بر نماد، فضای داخلی را در قالب ساختارهای توپولوژیکی، نمودارهای اتصال، یا سلسله مراتبی که دارای معناشناسی فضایی آگاه از زمینه هستند، بیان میکنند. رایجترین رویکرد مبتنی بر نمادین، یک نمودار ناوبری است که فضای داخلی را به صورت گرهها و لبهها بیان میکند. گره ها نقاط مورد علاقه داخلی (POI) را نشان می دهند، در حالی که لبه ها پیوندهای بین گره ها را نشان می دهند [ 11 ، 16 ، 18 ، 19]. اگرچه یک نمودار ناوبری نمی تواند به دقت مدل شبکه ای دست یابد، اما هم معنایی فضایی و هم اطلاعات هندسی درشتی دارد، بنابراین نمودارهای ناوبری به طور گسترده توسط سرویس های ناوبری آگاه از زمینه استفاده می شود.
مدلهای مختلف زمینههای کاربردی خاص خود را دارند، با تفاوتهایی در جنبههایی مانند توپولوژی فضایی، مرجع مکان، دقت مدل، الگوریتم مسیریابی و تجسم مسیر. برای پیاده سازی یک مدل فضای داخلی در یک برنامه دنیای واقعی، نیاز به یک فرآیند فیزیکی برای نمایش یک ساختمان واقعی مطابق با تعریف مدل دارد. با این حال، یک فرآیند دستی اغلب پرهزینه و مستعد خطاهای انسانی است، بنابراین بسیاری از مطالعات در حال بررسی چگونگی خودکارسازی فرآیند ذکر شده در بالا هستند. از آنجایی که مدل فضای داخلی ساخته شده با استفاده از رویکردهای مبتنی بر هندسی نسبتاً ساده است، اکثر مطالعات بر تولید مدلهای مبتنی بر نمادین تمرکز دارند [ 1 ، 5 ، 22 ، 23 ، 24 ، 25 .]. محققان این الگوریتم ها را به سه دسته تقسیم می کنند: نمودار دید، اسکلت های مستقیم و ساختارهای دوگانه. با این حال، بیشتر آنها برای مسیرهای همسطح طراحی شده اند، در حالی که تحقیقات کمی در مورد مسیرهای غیر همسطح یافت شده است.
لین و همکاران یک چارچوب تولید توپولوژی داخلی به نام i-GIT را پیشنهاد کرد که می تواند به طور خودکار شبکه های داخلی شامل مسیرهای سطح و غیر سطح را بسازد [ 26 ]. الگوریتم i-GIT فقط نیاز به خواندن یک مدل ساختمان سه بعدی دارد که با فرمت های IFC2x، 2×2 یا 2×3 مطابقت دارد. با پیش پردازش دستی کمی، الگوریتم می تواند به طور خودکار یک مدل فضای داخلی ساختمان های چند طبقه مبتنی بر نمودار تولید کند [ 26 ]. تازگی رویکرد i-GIT در تولید خودکار مسیرهای غیر طبقه مانند پله ها، رمپ ها و آسانسورها نهفته است. بخش 2.2 الگوریتم های ایجاد مسیرهای پرواز پله را به طور مفصل معرفی می کند.
به گفته محققان [ 3 ، 4 ]، مطالعات روی برنامه های کاربردی آگاه از زمینه داخلی را می توان به سه دسته اصلی تقسیم کرد: راهیابی و ردیابی [ 6 ، 7 ، 8 ، 9 ]، مدیریت منابع [ 10 ]، و پاسخ اضطراری [ 11 ، 12 ]. ، 13 ]. از میان مطالعات راهیابی و ردیابی، یان و همکاران. یک سیستم بازی را توسعه داد که مدل سازی اطلاعات ساختمان (BIM) و بازی های رایانه ای را برای تجسم معماری تعاملی یکپارچه می کند [ 6 ]. لین و همکاران یک روش مبتنی بر IFC برای جلوگیری از پیچیدگی نمایشهای سه بعدی برای برنامهریزی مسیر در فضاهای داخلی پیشنهاد شده است.7 ]. مطالعه دیگری با برنامه ریزی مسیرهای داخلی با در نظر گرفتن موانع بر اساس مدل BIM/IFC [ 9 ] سروکار داشت. در زمینه مدیریت منابع، یک سیستم اطلاعاتی که استفاده از BIM را برای وظایف عملیاتی مدیریت تسهیلات تسهیل میکند، پیشنهاد شد [ 10 ] و کانگ و همکاران. همچنین مدل های BIM را در یک سیستم مبتنی بر GIS برای مدیریت تسهیلات ادغام کرد [ 35 ]. این مطالعات عملیات روزمره چندین حوزه از جمله بازدید از مشاغل در ساختمان های اداری، خرید در مراکز خرید بزرگ، انتقال در ایستگاه های حمل و نقل و فعالیت های تعمیر و نگهداری در ساختمان ها را تسهیل می کند [ 3 ].
با توجه به حوادث تروریستی و بلایای اخیر در سراسر جهان، مطالعات تخلیه اضطراری و واکنش به سرعت در دهه گذشته پدیدار شده است. لی یک مدل شبکه داخلی و یک روش نقشه برداری سه بعدی را برای تسهیل تخلیه در هنگام اضطرار در محیط های ساخته شده پیشنهاد کرد [ 11 ]. تشکوری و همکاران همچنین یک مدل داخلی مبتنی بر IFC برای پاسخ دهندگان اضطراری برای درک آسان محیط داخلی، کاهش زمان سفر و بهینه سازی مسیریابی برای تخلیه معرفی کرد [ 12 ]. مدل فضای داخلی دیگری که از مسیریابی و ارزیابی تخلیه پشتیبانی میکند [ 13 ] پیشنهاد شد که هم اجسام فضایی ساکن و هم اطلاعات دینامیکی، مانند ترافیک در فضای باز، گسترش آتش، و حرکت پرسنل امدادی را در نظر گرفت.
این مطالعات در برنامه ریزی مسیر برای واکنش اضطراری و تخلیه در محیط های ساخته شده موثر هستند. با این حال، اکثر آنها مدلسازی پلهها را ساده کردند، که تاثیر پلهها در واکنش اضطراری را نادیده گرفت [ 11 ، 12 ، 13 ]. تحقیقات [ 27 ] نشان داده است که پلهها تنها گذرگاه ایمن بین طبقات در مواقع اضطراری هستند، بنابراین تلفات جانی و مالی به دلیل ازدحام در راه پلهها احتمالاً رخ میدهد. بیشتر تحقیقاتی که از مدلهای فضایی 2.5 بعدی استفاده کردهاند، آشکارا اهمیت این معابر را در حوادث اضطراری، مانند آتشسوزی و زلزله نادیده گرفتهاند [ 28 ].]. بنابراین، محققان استدلال کردهاند که به منظور بهبود کارایی، ظرفیت و ایمنی تخلیه اضطراری داخلی، یک مدل شبیهسازی باید از نظر کمی درست باشد تا با حرکت انسان در دنیای واقعی مطابقت داشته باشد [ 29 ، 30 ، 31 ]. بخش بعدی تحقیقات موجود در مورد چگونگی ایجاد مسیرهای پرواز از پله و مشکلات پیش آمده را شرح خواهد داد.
2.2. نسل مسیرهای پلکانی
در هنگام تخلیه اضطراری، پله ها اغلب مستعد شلوغی هستند. در مقایسه با معابر همسطح، پله های کج بیشتر در مواقع اضطراری باعث تلفات جانی و خسارت مالی می شوند. بنابراین، محققان [ 27 ] خاطرنشان کردهاند که از آنجایی که عملکرد تخلیه پلهها ارتباط تنگاتنگی با ایمنی عابران پیاده دارد، پلهها باید به عنوان یک منطقه بحرانی در هنگام تخلیه اضطراری و واکنش در نظر گرفته شوند.
در مطالعات اخیر بیشتر و بیشتر به رفتار جریان ساکنین روی راه پله ها در خلال تخلیه ساختمان های مرتفع پرداخته شده است [ 30 ]. گالیا و همکاران [ 36 ] یک شبیهسازی رایانهای انجام داد که نشان داد هم رفتار ادغام جریانهای ساکنین روی پلهها و هم چیدمان راهپلهها بر سرعت سرنشینان و سرعت جریان سرنشینانی که وارد فرود روی یک طبقه میشوند، تأثیر دارد. سانو و همکاران [ 30] رفتار تخلیه افراد تخلیه شده در راه پله یک ساختمان بلند 25 طبقه را بررسی کرد و دریافت که تراکم تخلیه کننده در فرودها در وضعیت متحرک متفاوت از وضعیت توقف شده است که راه پله کاملاً شلوغ بود. آنها همچنین مشاهده کردند که نتایج بسته به هندسه راه پله و محل خروج متفاوت خواهد بود. کوستر و همکاران [ 31] استدلال کرد که مدلهای کنونی حرکت تخلیهکننده روی پلهها که توسط اکثر مطالعات تخلیه به تصویب رسیده است به اندازه کافی با حرکت انسان مطابقت ندارد. یک مدل شبیهسازی برای کاربردهای دنیای واقعی باید از نظر کمی صحیح باشد تا کارایی، ظرفیت و ایمنی تخلیه را بهبود بخشد. در مطالعه دیگری که در مورد ناوبری داخلی برای افراد معلول بحث میکرد، محققان دریافتند که چیدمان رمپها و پلهها بر تحرک ویلچر سواران تأثیر میگذارد و بنابراین مدل دقیقتری از رمپها و پلهها برای تجزیه و تحلیل عمیق مورد نیاز است [ 21 ].
با این حال، در میان مطالعات مدلهای فضای داخلی و واکنشهای اضطراری، گذرگاههای عمودی بین طبقات ساختمان اغلب فقط شامل آسانسور میشوند. از سوی دیگر، آن مطالعاتی که پله ها را در نظر می گرفتند، مدل سازی پله ها را بیش از حد ساده کردند. بیشتر پلهها دارای فرودهایی در بین مسیرها هستند که بر سفر انسان تأثیر زیادی خواهد گذاشت. بنابراین، طول مسیر پله نباید تنها مورد توجه هنگام ارائه طرح تخلیه اضطراری باشد. شیونگ و همکاران [ 13 ] یک شبیهسازی تخلیه اضطراری با استفاده از یک مدل فضای داخلی مبتنی بر شبکه انجام داد که به موجب آن مسیرهای پرواز از پله به خطوط عمودی سادهسازی میشوند. تئو و چو [ 17] مدل شبکه ای به نام مدل شبکه هندسی چند منظوره (MGNM) را پیشنهاد کرد و بیان کرد که پله ها مسیرهای مهم اتصال بین طبقات مختلف هستند. با این حال، مطالعه آنها هندسه دقیق پله ها را در نظر نگرفت. به همین ترتیب، سایر مطالعات با استفاده از ساختار دوگانه به عنوان مدل دادههای مکانی، مدلسازی مسیرهای پله را نیز ساده کردهاند [ 18 ، 23 ، 28 ].
یکی از دلایل ساده سازی مسیر پله ها این است که تولید مسیرهای با دقت بالا نه تنها هزینه بر است، بلکه مستعد خطاهای انسانی نیز می باشد. Tsiliakou و Dimopoulou [ 32 ] به صورت دستی مسیرهای پلکانی دقیقی را هنگام اجرای یک سیستم برنامه ریزی مسیر داخلی ایجاد کردند. با این حال، آنها دریافتند که بستن هر انتهای مسیر پرواز از پله به صورت دو بعدی و سه بعدی به انتهای مسیرهای دیگر روی زمین بسیار مهم است، اما این یک کار چالش برانگیز است زیرا ایجاد مسیر در فضای سهبعدی اتفاق میافتد.
لین و همکاران [ 26 ] چارچوبی برای ایجاد فضای داخلی به نام i-GIT پیشنهاد کرد. بر اساس مدل IFC، i-GIT می تواند به طور خودکار شبکه های داخلی سه بعدی شامل مسیرهای سطح و غیر همسطح بسازد. مسیرهای غیر همسطح از پله های مستقیم [ 1 ، 33 ]، رمپ ها و آسانسورها [ 34 ] پشتیبانی می کنند، بنابراین برای آن دسته از LBS های داخلی که به مدل های فضای داخلی با دقت بالا نیاز دارند، مانند سیستم های واکنش اضطراری، قابل استفاده هستند. مسیر پله ها همانطور که در شکل 2 نشان داده شده است به سه دسته تقسیم می شوند . مسیرهای پرواز از پله، مسیرهای اریب در امتداد نویز آج پله هستند که با خطوط سبز در شکل 2 نشان داده شده است.. مسیرهای پله-فرود مسیرهای همسطحی هستند که مرکز فرود را با مسیرهای پروازی پله ای پیوند می دهند، در حالی که مسیرهای پله به طبقه نیز مسیرهای همسطحی هستند که مسیرهای پرواز پله را با سایر مسیرهای سطح کف پیوند می دهند [ 1 ].
نسخه اصلی الگوریتم i-GIT در طول تولید مسیرهای پرواز از پله بسیار پیچیده بود و همچنین محدودیت هایی در مدل پله دارد که می تواند روی آن اعمال شود. به عنوان مثال، نیاز است که راه پله با رایزر خاتمه یابد و رایزر فیزیکی مجاز نیست. علاوه بر این، صورت روی رایزر را نمی توان مایل کرد و نوک آج مجاز نیست [ 1 ]. با این حال، بیشتر پله های داخلی دارای آج های فیزیکی با دماغه و بالابرهای مایل هستند. این امر کارایی تولید خودکار مسیرهای داخلی را بسیار کاهش داده است. آن محدودیتهای مدلسازی، کاربرد الگوریتم را محدود میکند و نیازمند تلاشهای اضافی مدلسازان برای تنظیم مدلها برای تسلیم به الگوریتم است. بنابراین، الگوریتم مورد بازنگری عمده قرار گرفته است [ 33]، که با منطق مختصر تری بر محدودیت های مدل سازی فوق الذکر غلبه کرد. الگوریتم جدید برای تولید مسیر پرواز پله ای به شرح زیر است [ 33 ]:
- مرحله 1:
-
همانطور که در کادر خاکستری شکل 3 نشان داده شده است، “حداقل حجم محدود” پرواز پله را ایجاد کنید . پس از آن، سطوح بالا و پایین این حجم محدود را استخراج کنید، تمام اضلاع این سطوح را استخراج کنید، و سپس نقاط میانی هر طرف را ایجاد کنید، همانطور که توسط نقاط آبی (سطح بالا) و نقاط بنفش (سطح پایین) در شکل 3 نشان داده شده است .
- گام 2:
-
با انجام یک تقاطع سه بعدی بر روی هشت نقطه میانی در مرحله 1 با پله، نامزدهای شروع و پایان مسیر پله را تعیین کنید (همانطور که S’ و E’ در شکل 3 نشان داده شده است.
- مرحله 3:
-
انتهای مسیر (همانطور که E در شکل 3 نشان داده شده است ) را با جستجوی نزدیکترین فرود یا دال به نقطه E’ که در مرحله 2 به دست آمده است، ایجاد کنید و ارتفاع نقطه E’ را به بلندی فرود یا دال انتخاب شده تنظیم کنید. نقطه E نقطه پایانی مسیر پرواز از پله است.
- مرحله 4:
-
شروع مسیر (همانطور که S در شکل 3 نشان داده شده است ) را با جستجوی نزدیکترین فرود یا دال به نقطه S’ که در مرحله 2 به دست آمده است و تنظیم ارتفاع نقطه S’ به بلندی فرود یا دال انتخاب شده ایجاد کنید. پس نقطه S نقطه شروع مسیر پرواز از پله است.
- مرحله 5:
-
با بالا بردن ارتفاع نقطه S به دست آمده در مرحله 4 به اندازه یک پله، نقطه مسیر مسیر اجرا را ایجاد کنید (همانطور که توسط M در شکل 3 نشان داده شده است). پس نقطه M نقطه راه مسیر پرواز از پله است.
- مرحله 6:
-
مسیر پرواز از پله را با پیوند دادن نقطه شروع (S)، نقطه راه (M) و نقطه پایان (E) به دست آمده در مرحله 3 تا مرحله 5 ایجاد کنید. بخش های به دست آمده مسیر پرواز از پله هستند، همانطور که توسط چند خط قرمز شکل نشان داده شده است. 3 .
اگرچه نسخه فعلی الگوریتم i-GIT محدودیتهای الگوریتم اصلی در پارامترهای مدلسازی پله را حذف میکند و همچنین کارایی الگوریتم را بهبود میبخشد، اما فقط برای پلههای مستقیم قابل اجرا است و از پلههای مارپیچ و پیچدار پشتیبانی نمیکند. معمولا در خانه های شهری یا ساختمان های عمومی دیده می شوند. این دو نوع پله فرود ندارند. پله های هر دو پله ممکن است با ارتفاع تغییر جهت دهند. شکل پله و اندازه پله های بادگیر حتی یکسان نخواهد بود. این ویژگی های ساختار پله، دشواری طراحی الگوریتم برای پشتیبانی از دو نوع پله را افزایش می دهد. هدف از این مطالعه غلبه بر این مشکلات و توسعه الگوریتمی است که بتواند از پلههای مارپیچ و بادگیر پشتیبانی کند و در عین حال برای پلههای مستقیم قابل اجرا باشد.
3. الزامات و ملاحظات
یک راه پله کامل از راهروها، فرودها، تکیه گاه ها و نرده ها تشکیل شده است. از این میان، اجزایی که به تولید مسیر مربوط میشوند، runs و landing هستند. یک دویدن از چند پله تشکیل شده و پله ها را می توان با آج و رایزر هموار کرد. با توجه به جهت حرکت، پله ها را می توان تقریبا به سه نوع تقسیم کرد: مستقیم، مارپیچ و بادگیر. علاوه بر این، پشتیبانی از اجراها می تواند یکپارچه و غیر یکپارچه باشد. علاوه بر این، مسیرهای یکپارچه می توانند صاف، پلکانی و پایین افقی باشند.
انواع و ساختار پله های ذکر شده به طور مستقیم بر طراحی الگوریتم تولید مسیر پرواز پله تاثیر می گذارد. این بخش ابتدا انواع پله ها، تغییرات در ساختار پله ها و پارامترهای مدل سازی مهمی را که باید توسط الگوریتم در نظر گرفته شود، یعنی جهت گیری، ساختار اجرا، آج ها، رایزرها و غیره توضیح می دهد.
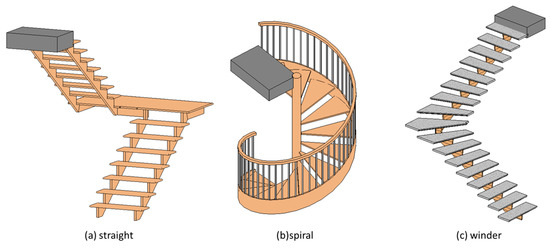
3.1. جهت اجرا
الگوریتم باید از سه جهت پله پشتیبانی کند: مستقیم (همانطور که در شکل 4 الف نشان داده شده است)، مارپیچ (همانطور که در شکل 4 ب نشان داده شده است)، و پله های بادگیر. سیم پیچ ها می توانند L شکل (همانطور که در شکل 4 ج نشان داده شده است) یا U شکل (همانطور که در شکل 4 نشان داده شده است) باشند.د). پله های مستقیم دارای مسیرهای مستقیم هستند که با یک فرود در بین آنها به هم متصل می شوند، در حالی که راه پله های مارپیچی و بادگیر معمولاً فرود ندارند و مستقیماً به دال ها متصل می شوند. همچنین پله های این دو نوع پله با ارتفاع تغییر جهت می دهند. علاوه بر این، پله های یک پله بادگیر مانند پله های مستقیم و مارپیچ شکل و اندازه ثابتی ندارند. در پلههای بادگیر L شکل، پلههایی که در پیچ دویدن قرار میگیرند، بادگیر هستند که از نظر شکل و اندازه با سایر پلهها تفاوت دارند. این ویژگی مزیت صرفه جویی در مساحت کف مورد نیاز را دارد و بنابراین معمولاً خانه های شهری دیده می شوند. از سوی دیگر، پلههای مارپیچ و پلههای بادگیر U شکل معمولاً در ساختمانهای عمومی مانند مدارس، کتابخانهها و سازمانهای دولتی دیده میشوند.
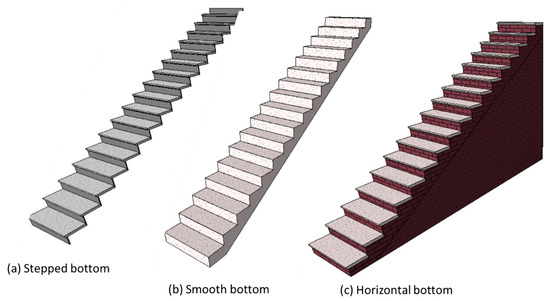
3.2. Run Structure
الگوریتم باید اجراهای یکپارچه و غیر یکپارچه را پشتیبانی کند. همانطور که در شکل 5 نشان داده شده است ، دوهای یکپارچه دارای ساختار محکمی در زیر آج های خود هستند و مواد معمولاً بتنی هستند. پله های ریخته گری در محل یا پیش ساخته اغلب در این دسته قرار می گیرند. الگوریتم باید از تمام تغییرات در ساختار پشتیبانی برای اجراهای یکپارچه پشتیبانی کند، مانند پلکانی (همانطور که در شکل 5 الف نشان داده شده است)، صاف (همانطور که در شکل 5 ب نشان داده شده است)، و ته افقی (همانطور که در شکل 5 ج نشان داده شده است).
در مقابل، مسیرهای غیر یکپارچه ساختار حمایتی فوق الذکر را در زیر آج های خود ندارند، اما آج ها توسط یک ریسمان یا کالسکه پشتیبانی می شوند. اجراهای غیر یکپارچه معمولاً در پله های مونتاژ شده دیده می شوند. شکل 6 مسیرهای غیر یکپارچه را برای سه جهت پله نشان می دهد.
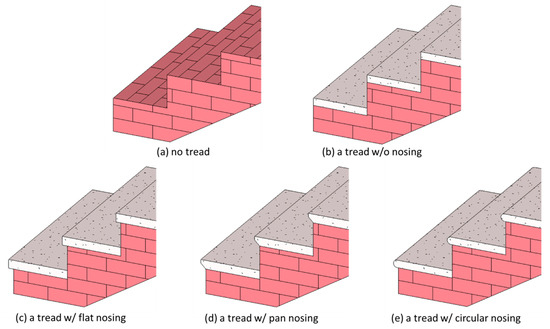
3.3. آج ها
الگوریتم باید از مراحل بدون آج (همانطور که در شکل 7 الف نشان داده شده است) و با آج (همانطور که در شکل 7 b–e نشان داده شده است) پشتیبانی کند. پله های آج می توانند بدون دماغه (همانطور که در شکل 7 ب نشان داده شده است) یا با دماغه (همانطور که در شکل 7 c–e نشان داده شده است) باشند. الگوریتم باید مراحلی را با نویزینگ که به ترتیب در شکل 7 c-e نشان داده شده است، که نمایه آنها مسطح، تابه یا دایره ای است، پشتیبانی کند.
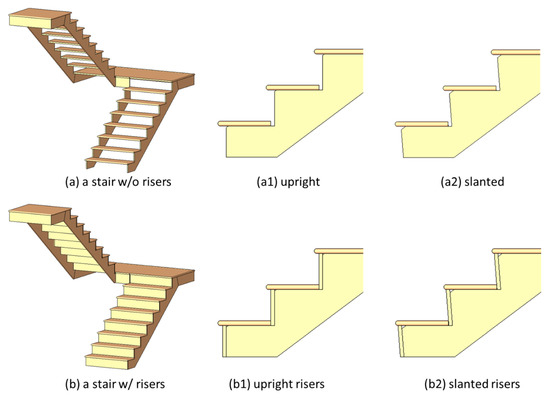
3.4. رایزرها
الگوریتم باید از اجراهای بدون رایزر (همانطور که در شکل 8 الف نشان داده شده است) و اجرای با رایزرها (همانطور که در شکل 8 ب نشان داده شده است) پشتیبانی کند. علاوه بر این، قسمت های عمودی پله ها می توانند عمودی (همانطور که در شکل 8 a1,b1 نشان داده شده است) یا مایل (همانطور که در شکل 8 a2,b2 نشان داده شده است) باشند.
این الگوریتم همچنین نیاز به پشتیبانی از رویکردهای مدل سازی مختلف برای پایان دادن به یک اجرا دارد. همانطور که در شکل 9 الف نشان داده شده است، اجراهای معمول با رایزر شروع می شوند و با رایزر پایان می یابند . برای این نوع اجرا، پایین اولین پله (پایین ترین پله) دال را لمس می کند، در حالی که آخرین پله (بالاترین پله) معمولاً شامل یک رایزر بدون پله فیزیکی است. برای اجراهای بدون رایزر، به نظر می رسد آخرین مرحله از دست رفته است. در مقابل، اگر یک دویدن همانطور که در شکل 9 ب نشان داده شده است با آج خاتمه یابد ، آخرین پله (بالاترین پله) دویدن دارای یک پله فیزیکی خواهد بود و ارتفاع سطح بالایی آن با ارتفاع فرود متصل یکسان خواهد بود. یا اسلب
جدول 1 تغییرات در سازه های پله پشتیبانی شده توسط دو نسخه از الگوریتم های i-GIT و نسخه ارائه شده توسط این مطالعه را مقایسه می کند. با توجه به جدول 1 ، الگوریتم پیشنهادی تا حد زیادی کاربردپذیری برای پشتیبانی از انواع مختلف پله و پارامترهای مدلسازی را بهبود میبخشد.
4. اجرا
4.1. نمای کلی و علامت گذاری
مدل فضای داخلی مورد استفاده برای مسیرهای پلکانی تولید شده در این مطالعه، یک نمودار ناوبری است که به عنوان مدل مبتنی بر خط مرکزی نیز شناخته میشود، که یک رویکرد مبتنی بر نمادین است، همانطور که در بررسی ادبیات ذکر شد. مسیرهای پله تولید شده و مورد بحث در اینجا عمدتاً مسیرهای پرواز پله ای هستند که توسط i-GIT پیشنهاد شده است، همانطور که در شکل 2 نشان داده شده است [ 1 ]. شکل 10 مسیرهای پله و نمادهای سه پله را با جهت گیری های مختلف نشان می دهد، که در آن خطوط قرمز مسیرهای پرواز پله و خطوط آبی مسیرهای پله-فرود هستند. هر مسیر پرواز از پله ها شامل یک شروع، یک پایان و چندین ایستگاه است. شروع مسیر، نقطه برآمدگی عمودی نقطه میانی لبه جلوی آج پله اول روی دال (یا فرود پله) در زیر است، همانطور که توسط نقطه S در نشان داده شده است.شکل 10 . انتهای مسیر همانگونه که در نقطه E در شکل 10 نشان داده شده است، نقطه برآمدگی عمودی نقطه میانی لبه عقبی آج آخرین پله روی دال (یا فرود پله) در بالا است . نقاط راه، نقاط میانی لبه جلویی آج در هر پله بین شروع و پایان مسیر هستند. مسیر پرواز از پله همانگونه که با خطوط قرمز در شکل 10 نشان داده شده است، چند خطی است که شروع مسیر، نقاط بین راه به ترتیب و انتهای مسیر را به هم وصل می کند. در مسیر پرواز تنها یک نقطه راه برای پله های مستقیم وجود دارد، در حالی که چندین ایستگاه برای پله های مارپیچ و پیچ دار وجود دارد.
به طور خلاصه، فرآیند تولید مسیر پرواز پله ای به این صورت است که شروع مسیر، نقاط بین راه و انتهای مسیر هر پرواز را مشخص می کنیم و سپس این گره ها را به هم وصل می کنیم تا یک پلی لاین که مسیر پرواز پله است تشکیل شود. شکل 11روند کلی ایجاد مسیر پرواز از پله را برای یک بار اجرا نشان می دهد. چهار روش اصلی به شرح زیر وجود دارد: (1) GetPathStartZValue—برای محاسبه ارتفاع یا مقدار Z شروع مسیر. (2) GeneratePathStart – برای تعیین و تولید مسیر شروع. (3) GeneratePathWaypoints – برای تعیین و تولید نقاط راه. و (4) GeneratePathEnd—برای تعیین و تولید انتهای مسیر. اتصال آن گره ها به ترتیب می تواند مسیر را تشکیل دهد. عناصر مدل ساختمان IFC مورد نیاز الگوریتم فقط شامل IFCSTAIRFLIGHT و IFCSLAB است. اولی شامل تمام پلهها میشود، در حالی که دومی شامل دالها و فرود پلهها است.
4.2. منطق الگوریتم
این بخش پله مارپیچ در شکل 10c را به عنوان مثال برای توصیف منطق الگوریتمی چهار رویه می گیرد.
4.2.1. GetPathStartZValue
اولین روش برای ایجاد مسیر پرواز از پله، تعیین ارتفاع یا مقدار Z شروع مسیر است. این مقدار با ارتفاع رایزر ترکیب می شود و در روش های زیر برای ایجاد شروع مسیر، ایستگاه های بین راه و انتهای مسیر استفاده می شود.
طبق تعریف شروع مسیر در بخش 4.1 ، ارتفاع شروع مسیر باید حداکثر مقدار Z دال یا فرود پله متصل به انتهای مسیر باشد. نرم افزارهای GIS و BIM دارای یک عملکرد داخلی هستند که می تواند مستقیماً حداقل یا حداکثر مقدار Z یک شی سه بعدی را بدست آورد. بنابراین، برای تعیین ارتفاع شروع یک مسیر، فقط باید سطح دال یا پله متصل به پایین راه پله را تعیین کرد، سپس حداکثر مقدار Z آن را بازیابی کرد. با این حال، همانطور که در شکل 8 الف نشان داده شده است، برای پلههای بدون بالابر فیزیکی، نمیتوان با اعمال یک تقاطع سه بعدی روی IFCSTAIRFLIGHT و IFCSLAB، دال یا پله مورد نیاز را پیدا کرد.
روش مورد استفاده در این مطالعه به شرح زیر است: ابتدا ردپای پایینی یک راه پله را ایجاد می کنیم، همانطور که با چند ضلعی زرد در شکل 12 نشان داده شده است ، و سپس از فاصله کمی بیشتر از ارتفاع پله (مثلا 30 سانتی متر) استفاده می کنیم. تحمل جستجو برای انجام یک جستجوی فضایی با ردپای در برابر تمام ویژگیهای IFCSLAB. حداکثر Z-value ویژگی یافت شده، ارتفاع صحیح شروع مسیر است.
4.2.2. GeneratePathStart و GeneratePathWaypoints
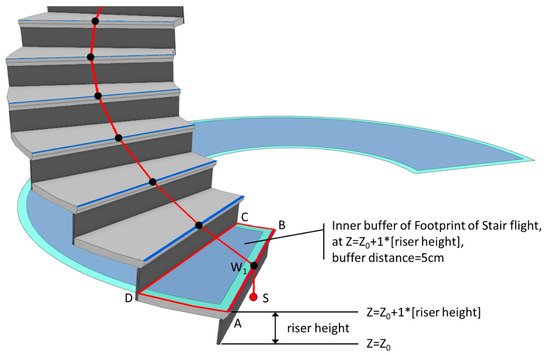
پس از به دست آوردن مقدار Z شروع مسیر، الگوریتم شروع به تولید مسیر شروع، نقاط بین مسیر و انتهای مسیر می کند. با این حال، اولین گره تولید شده، شروع مسیر نیست. در عوض، نقطه راه در مرحله اول اجرا، همانطور که توسط W 1 در شکل 13 نشان داده شده است، شروع مسیر است. این ملاحظات برای آن دسته از پلههایی است که بدون بالابرهای فیزیکی شروع میشوند و مسیرشان باید با اولین قدم مشخص شود. روش شناسایی W 1 ابتدا برای ایجاد ردپای دویدن است (همانطور که با چند ضلعی نارنجی در شکل 13 نشان داده شده است )، و ارتفاع این ردپا را تا بالای پله اول بالا می برد، یعنی ارتفاع یک رایزر را اضافه می کند. به مقدار Z مسیر شروع به دست آمده در بخش 4.2.1. ردپای مرتفع توسط چندضلعی فیروزه ای در شکل 13 نشان داده شده است. متعاقبا، انجام تقاطع روی این ردپای با راه پله می تواند ناحیه مرزی ABCD را ایجاد کند. بعد، لبه جلوی پله اول، یعنی آب¯، سپس از طریق یک روش مناسب استخراج می شود که در ادامه به آن پرداخته خواهد شد. سپس، نقطه وسط از آب¯نقطه راه W 1 است. در نهایت، با کاهش ارتفاع نقطه راه W 1 به مقدار Z شروع مسیر، نقطه حاصل شروع مسیر است.
روش شناسایی لبه جلوی پله اول، آب¯، به شرح زیر است: ابتدا یک بافر داخلی به میزان 5 سانتی متر بر روی ردپای بلند شده ایجاد کنید که مقدار Z برابر با بالای پله اول است (همانطور که توسط بلوک فیروزه ای در شکل 13 نشان داده شده است که منجر به چندضلعی آبی در شکل می شود. 14. سپس تمام اضلاع ناحیه مرزی ABDC بدست آمده در مرحله قبل را استخراج کنید. آب¯، بسی¯، سیD¯، و Dآ¯، سپس لبه جلوی پله اول، آب¯، سمتی است که ردپای کوچک شده را لمس نمی کند (چند ضلعی آبی در شکل 14 ).
سپس میتوان با روشی مشابه با بدست آوردن نقطه راه W 1 مرحله اول، نقاط بین راه را ایجاد کرد. با در نظر گرفتن نقطه راه پله دوم، W 2 ، به عنوان مثال، ابتدا ردپای دویدن را به بالای پله دوم ببرید و تقاطع را روی این ردپای مرتفع با پله انجام دهید تا ناحیه مرزی ایجاد شود. در مرحله بعد، تمام ضلع های ناحیه مرزی را استخراج کنید و دو ضلع با طول های طولانی و دوم را انتخاب کنید. در نهایت، یکی را انتخاب کنید که نزدیکترین نقطه به مسیر W 1 است. نقطه وسط آن سمت، نقطه راه W 2 مرحله دوم است. روش های تولید نقاط بین باقیمانده را می توان از طریق این قیاس استنتاج کرد.
4.2.3. GeneratePathEnd
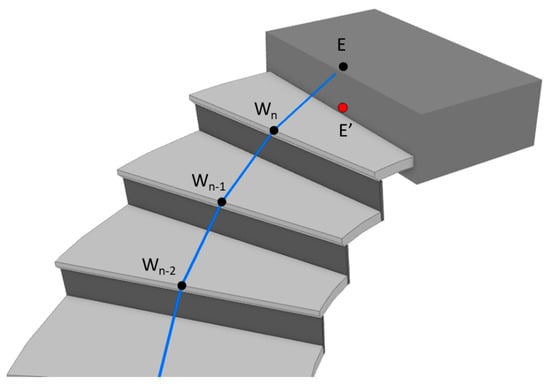
در طول تولید نقاط راه برای آخرین پله، نقطه وسط لبه عقب آخرین پله (همانطور که توسط E’ در شکل 15 نشان داده شده است) نیز به منظور ایجاد انتهای مسیر استخراج می شود. دال یا محل فرود پله را با فاصله تقریباً یک پله ارتفاع از E’ جستجو کنید (مثلاً 30 سانتی متر)، و ارتفاع E’ را تا حداکثر مقدار Z دال یا زمین پله پیدا کنید. نقطه حاصل (همانطور که توسط E در شکل 15 نشان داده شده است) انتهای مسیر است.
5. تأیید
5.1. موارد آزمون
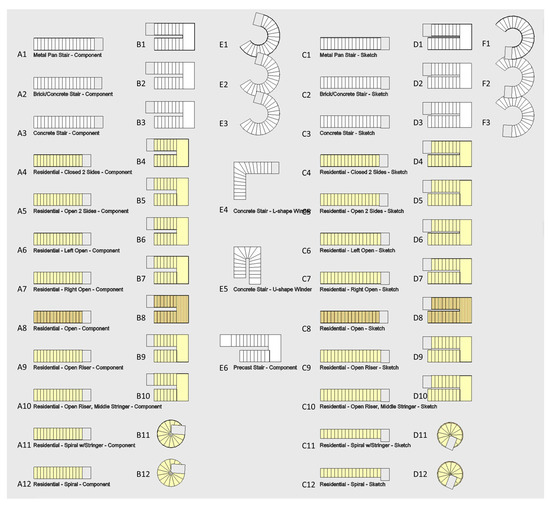
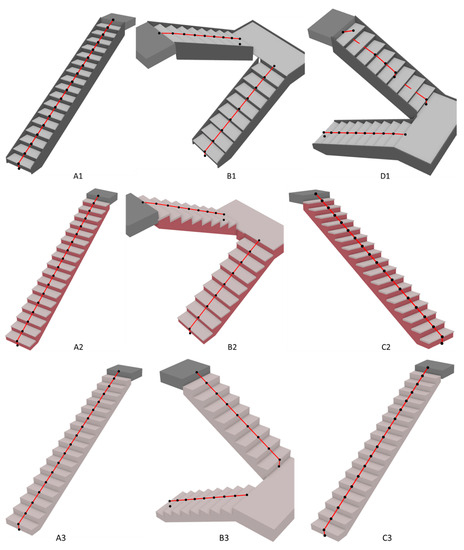
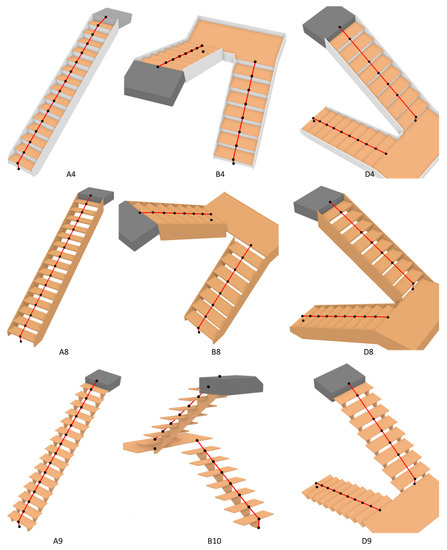
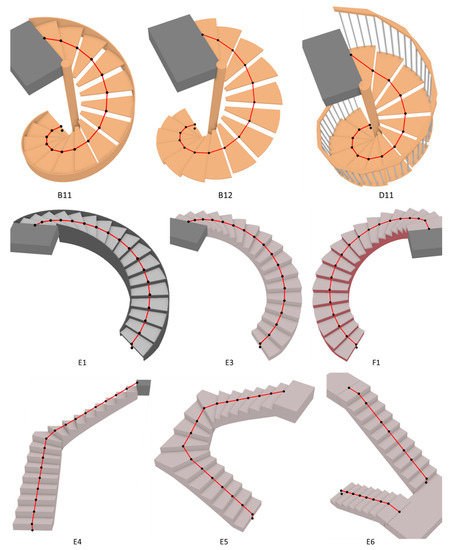
این مطالعه از 57 پله به عنوان موارد آزمایشی استفاده کرد، همانطور که در شکل 16 نشان داده شده است ، شامل سه پله خودساخته، که در آن E4 و E5 پله های بادگیر و E6 یک پله پیش ساخته است. 54 پله باقی مانده از وب سایت رسمی Autodesk Revit [ 37]. موارد از نوع A، نوع B، و نوع E توسط اجزاء ایجاد شده اند در حالی که موارد از نوع C، نوع D و نوع F توسط اسکیس ایجاد شده اند. در همه موارد آزمایشی، پلههای مستقیم با یک دویدن (A1–A12، C1–C12) و پلههای مستقیم با دو مسیر (شامل یک فرود) (B1–B10، D1–D10) توسط نسخه فعلی i- پشتیبانی میشوند. الگوریتم GIT که در مجموع 44 مورد را شامل می شود. انواع پلههای هدف که توسط این مطالعه پشتیبانی میشوند عبارتند از پلههای مارپیچ بدون بالابر (B11، B12، D11، D12)، پلههای مارپیچی با بالابر (E1–E3، F1–F3)، پلههای بادگیر L شکل (E4)، پله های بادگیر U شکل (E5) و پله های پیش ساخته (E6) که در مجموع 13 مورد را شامل می شود.
این مطالعه تمام موارد آزمایشی را با استفاده از ابزار داخلی IFC Export ارائه شده توسط Autodesk Revit 2019 به IFC 2×3 صادر کرد و دریافت که موارد C1 و C4-C7 به عناصر IFCSTAIR تبدیل شدند، در حالی که پلههای باقی مانده در IFCSTAIRFLIGHT بودند. تفاوتهای بین عناصر IFCSTAIR و IFCSTAIRFLIGHT در این است که دویدنها و فرودهای اولی از نظر فیزیکی نیز از هم جدا نیستند، زیرا ویژگیهایی را برای دویدنها، مانند تعداد افزایشدهنده، تعداد روندها، ارتفاع افزایشدهنده و طول روند ارائه نمیدهند. از آنجایی که نیاز به اطلاعات هندسی ساختار پله و ویژگیهای تعداد بالابرها و ارتفاع بالابر دارد، این الگوریتم برای موارد C1 و C4-C7 قابل اجرا نیست. علاوه بر این، موارد D2 و D3 به عناصر IFCSTAIRFLIGHT تبدیل شدند، اما مسیرهای آنها به درستی از فرود جدا نشده است. و ویژگی های اجراها نیز نادرست است. الگوریتم نمی تواند این دو مورد را نیز پردازش کند. مدل های اصلی هر هفت مورد معیوب اتفاقاً همه با طراحی ایجاد شده اند. این تصادف مشکوک باقی ماند و نیاز به بررسی بیشتر در مطالعات آینده دارد.
این مطالعه هفت پله فوق الذکر را حذف کرد و از 50 مورد باقی مانده برای آزمایش استفاده کرد. طبق طبقه بندی ذکر شده در بخش 3 ، این 50 مورد را می توان به 13 گروه مختلف تقسیم کرد، همانطور که در جدول 2 نشان داده شده است.
5.2. نتایج آزمون
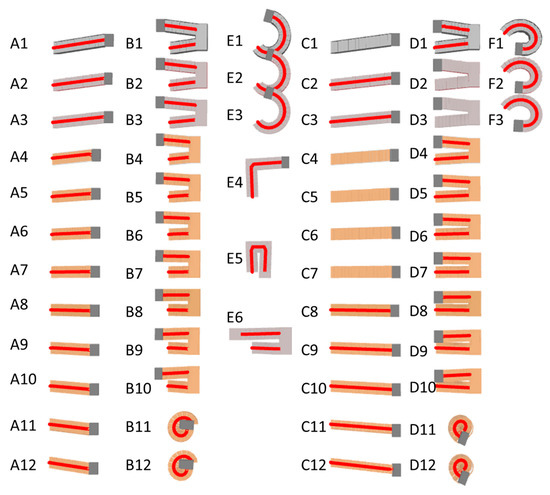
نتایج آزمایش تولید مسیر در 50 مورد در شکل 17 نشان داده شده است. جدول 3 نتایج را خلاصه می کند. همانطور که در جدول 3 نشان داده شده است ، در بین 50 پله آزمایشی، تنها یک مورد (که با D1 مشخص می شود) وجود دارد که به نظر می رسد مسیر ایجاد شده منحرف شده است. در هشت مورد دیگر (که با D4-D10 و E6 مشخص می شوند)، برخی از ایستگاه های بین راه گم شده اند، اما صحت هندسی مسیرها تحت تأثیر قرار نگرفته است.
شکل 18 ، شکل 19 و شکل 20 نتایج آزمون سه مورد نماینده را در بین هر یک از 13 گروه آزمایشی، از جمله موارد اشتباه فوق الذکر نشان می دهد. مورد آزمایشی D1 متعلق به یک پله غیر یکپارچه با دو مسیر مستقیم است که توسط آجهای دماغهای تابهشکل و بالابرهای مایل ساخته شدهاند. با توجه به مورد آزمایشی D1 نشان داده شده در شکل 18مسیر تولید شده برای اولین بار کاملاً صحیح است، در حالی که مسیر برای دور دوم دارای شروع مسیر صحیح است، اما نقاط بین راه در پله های دوم و هفتم و همچنین موقعیت های ایستگاه های راه سوم و هشتم وجود ندارد. مراحل، و انتهای مسیر نادرست است. از آنجایی که موارد دیگر در همان گروه آزمایشی مورد D1، مانند A1 و B1، این خطاها را ندارند، میتوان چنین استنباط کرد که خطاها ممکن است ناشی از روش مدلسازی مدل اصلی باشد، در حالی که مورد D1 با ترسیم در مدلسازی شده است. Revit، در حالی که موارد دیگر توسط اجزای پله مدلسازی میشوند. هنگام مدلسازی یک پله با طراحی در Revit، مدلسازها با کشیدن دستی لبههای جلویی پله روی یک پلان دوبعدی، تمام بالابرها را تخصیص میدهند. تحت شرایط عادی، فاصله بین این بالابرها باید به یک اندازه باشد (که نشان می دهد که عمق پله برای همه مراحل یکسان است) و از صحت هندسی پله اطمینان حاصل شود. حتی یک انحراف جزئی در برخی از فواصل بین رایزرها ممکن است منجر به خطاهای یافت شده در مورد آزمایشی D1 شود. با این حال، برای اثبات این استنباط همچنان به تحقیقات بیشتری نیاز است.
با توجه به نتایج آزمایش نشان داده شده در شکل 19 ، در موارد آزمایشی D4-D10، نقاط راه در مرحله دوم و هفتم دومین اجرا وجود ندارد، اما درستی هندسی مسیر بیتأثیر باقی میماند. از آنجایی که مدل اصلی این کیس ها نیز با طراحی در Revit ایجاد شده اند، آنها نیز ممکن است دچار مشکلات مشابه تست D1 شوند. از آنجایی که موقعیت نقاط راه در پله های سوم و هشتم در این موارد صحیح است، بنابراین صحت هندسی مسیرها تحت تأثیر قرار نمی گیرد.
آخرین مورد اشتباه، E6، یک پله پیش ساخته است که مسیرهای آن با یک آج ختم می شود، بنابراین بخش مسیر در آخرین پله افقی به نظر می رسد. همانطور که در شکل 20 نشان داده شده است ، در مورد آزمایشی E6، نقاط راه در مرحله دوم، پنجم و هشتم مرحله دوم وجود ندارد، اما صحت هندسی مسیر تحت تاثیر قرار نمیگیرد. از آنجایی که مدل اصلی تست E1 توسط اجزای پلکانی در Revit ایجاد شده است، مشکل یافت شده در این مورد حل نشده باقی مانده است و نیاز به بررسی بیشتر در آینده دارد.
در مجموع، به استثنای هفت مورد با داده های IFC صادر شده نادرست، نتایج آزمایش نشان می دهد که میزان صحت مسیرهای پله ایجاد شده توسط این الگوریتم تا 98٪ (49/50) است. اگر مواردی که برخی از نقاط راه گم شده اند، اما صحت هندسی مسیرها تحت تأثیر قرار نگرفته است، در نظر گرفته شوند، میزان صحت کلی مسیرهای پله 82٪ است (41/50).
6. نتیجه گیری
خدمات مبتنی بر مکان داخلی روز به روز محبوب تر می شوند. بسیاری از برنامه ها مانند راهیابی، مدیریت منابع و پاسخ اضطراری نیاز به تکیه بر مدل های دقیق داده های مکانی دارند. بر اساس مدل IFC و چارچوب تولید توپولوژی داخلی پیشنهاد شده توسط i-GIT، این مطالعه یک الگوریتم تولید مسیر پرواز پله ای را توسعه داد که می تواند از پله های مستقیم، پله های مارپیچ و پله های بادگیر با تغییرات پارامترهای مدل سازی در طول مدل سازی سه بعدی در نرم افزار BIM پشتیبانی کند. نتایج آزمایش موارد زیر را نشان داد: (1) در بین 57 مورد آزمایشی، هفت پله در Revit با ترسیم مرزهای راه پله ساخته شد که هندسه و اطلاعات ویژگی مورد نیاز الگوریتم را پس از تبدیل به فرمت IFC به درستی ارائه نکردند. بنابراین الگوریتم این بود که قادر به پردازش این پله ها و ایجاد مسیرها نیست. (2) در میان 50 مورد آزمایشی باقی مانده، تنها یک مورد وجود داشت که مسیر آن نادرست به نظر می رسید. در هشت مورد آزمایشی دیگر، اگرچه چندین نقطه راه وجود نداشت، درستی هندسی مسیرها بیتأثیر باقی ماند.
مشکلی که در هفت مورد یافت شد ممکن است ناشی از روش مدلسازی مورد استفاده در مدلسازی سه بعدی در Revit یا صرفاً نقص عملکرد داخلی IFC Export باشد که توسط Revit ارائه شده است. آزمایش و مقایسه بیشتر این موارد مشکل ساز در آینده مورد نیاز است. مشکلی که در 50 مورد باقیمانده یافت میشود ممکن است از دقت ناکافی در هندسه پله ناشی از روش مدلسازی ناشی شده باشد زیرا این الگوریتم به ارتفاع بالابر و تعداد بالابرهای ارائهشده توسط مدل پله متکی است. اگر دادههای هندسی اجراها دقیقاً ارائه نشده باشند، الگوریتم ایجاد مسیر شروع، پایان و ایستگاههای بین ممکن است در مراحل خاصی عمل نکند و باعث شود برخی از ایستگاههای بین راه از دست رفته یا حتی انحراف مسیر ایجاد شود. در آینده، الگوریتم ممکن است هنگام انجام جستجوی فضایی یا تقاطع سه بعدی اضافه کردن یک تلورانس را در نظر بگیرد.
علاوه بر این، برای پشتیبانی از پلههای مارپیچ و پیچدار، الگوریتم باید تمام نقاط راه را در هر مرحله تولید کند، بنابراین زمان محاسبه بسیار بیشتر از الگوریتم i-GIT فعلی بود. پیشنهاد می شود که الگوریتم توسعه یافته در این مطالعه می تواند در آینده با الگوریتم i-GIT ادغام شود. در کارهای آینده، پیش از پردازش تمام مدلهای پله، میتوان یک پیشتعیین در جهتگیری پله اضافه کرد. برای پلههای با مسیر مستقیم، باید از الگوریتم فعلی i-GIT استفاده شود، در حالی که برای پلههای با مسیر غیر مستقیم، الگوریتم توسعهیافته در این مطالعه باید به جای آن استفاده شود.
منابع
- لین، وای؛ Lin, PH نسل هوشمند توپولوژی داخلی (i-GIT) برای مسیریابی انسان در فضای داخلی بر اساس مدل های IFC و فناوری 3D GIS. خودکار ساخت و ساز 2018 ، 94 ، 340-359. [ Google Scholar ] [ CrossRef ]
- زلاتانوا، اس. لیو، ال. سیتول، جی. ژائو، جی. Mortari, F. Space Subdivision for Indoor Applications ; دانشگاه صنعتی دلفت، موسسه تحقیقاتی OTB برای محیط ساخته شده: دلفت، هلند، 2014. [ Google Scholar ]
- گوندوز، م. ایسیکداغ، یو. Basaraner, M. مروری بر تحقیقات اخیر در مدل سازی و نقشه برداری داخلی. ISPRS Int. قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2016 ، 41 ، 289-294. [ Google Scholar ]
- وربویز، م. Walton, L. Towards A Model of Indoor Space ; دانشگاه مین: Orono، ME، ایالات متحده آمریکا، 2008. [ Google Scholar ]
- ما، ز. Ren, Y. کاربرد یکپارچه BIM و GIS: مروری. Procedia Eng. 2017 ، 196 ، 1072-1079. [ Google Scholar ] [ CrossRef ]
- یان، دبلیو. کالپ، سی. Graf, R. یکپارچه سازی BIM و بازی برای تجسم معماری تعاملی در زمان واقعی. خودکار ساخت و ساز 2011 ، 20 ، 446-458. [ Google Scholar ] [ CrossRef ]
- لین، Y.-H. لیو، Y.-S. گائو، جی. هان، X.-G. لای، سی.-ای. Gu, M. برنامه ریزی مسیر مبتنی بر IFC برای فضاهای داخلی سه بعدی. Adv. مهندس آگاه کردن. 2013 ، 27 ، 189-205. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زو، س. لی، ی. Xiong، Q. زلاتانوا، اس. دینگ، ی. ژانگ، ی. Zhou، Y. GML موقعیت مکانی چند بعدی داخلی و کاربرد آن برای خدمات مکان یابی داخلی در همه جا. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 220. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- خو، ام. وی، اس. زلاتانوا، اس. ژانگ، R. برنامه ریزی مسیر داخلی مبتنی بر BIM با در نظر گرفتن موانع. ایسپرس ان. فتوگرام از راه دور. حس اسپات. Inf. علمی 2017 ، 417-423. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- حجازی، ط. اهلرز، ام. Zlatanova، S. BIM برای تجزیه و تحلیل جغرافیایی (BIM4GEOA): راه اندازی سیستم اطلاعات سه بعدی با نرم افزار منبع باز و مشخصات باز (OS). در مجموعه مقالات پنجمین کنفرانس بین المللی اطلاعات جغرافیایی سه بعدی، برلین، آلمان، 3 تا 4 نوامبر 2010. [ Google Scholar ]
- لی، جی. یک مدل داده قابل هدایت سه بعدی برای پشتیبانی از واکنش اضطراری در محیط های ساخته شده ریزفضایی. ان دانشیار صبح. Geogr. 2007 ، 97 ، 512-529. [ Google Scholar ] [ CrossRef ]
- تشکوری، ح. رجبی فرد، ع. کلانتری، م. مدل فضایی سه بعدی داخلی/خارجی جدید برای تسهیل پاسخ اضطراری داخلی. ساختن. محیط زیست 2015 ، 89 ، 170-182. [ Google Scholar ] [ CrossRef ]
- Xiong، Q. زو، س. دو، ز. زو، ایکس. ژانگ، ی. نیو، ال. لی، ی. Zhou، Y. یک مدل میدان داخلی پویا برای شبیهسازی تخلیه اضطراری. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 104. [ Google Scholar ] [ CrossRef ]
- افیونی، من. ری، سی. Claramunt، C. مدلهای فضایی برای سیستمهای ناوبری داخلی آگاه از زمینه: یک بررسی. جی. اسپات. Inf. علمی 2012 ، 4 ، 85-123. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زلاتانوا، اس. سیتول، جی. ناکاگاوا، م. Zhu, Q. مشکلات در نقشه برداری و مدل سازی فضای داخلی. ISPRS Int. قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2013 ، 4 ، 63-68. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بکر، تی. ناگل، سی. Kolbe، TH یک مدل فضایی چندلایه رویداد برای ناوبری در فضاهای داخلی . Springer: برلین/هایدلبرگ، آلمان، 2008; صص 61-77. [ Google Scholar ]
- تئو، T.-A. چو، ک.-اچ. مدل شبکه داخلی مبتنی بر BIM برای برنامه ریزی مسیر ترکیبی داخلی و خارجی. Adv. مهندس انفورماتیک 2016 ، 30 ، 268-282. [ Google Scholar ] [ CrossRef ]
- لیو، ال. Zlatanova، S. به سمت یک مدل شبکه سه بعدی برای ناوبری داخلی. در مدیریت داده های شهری و منطقه ای ; CRC Press: دلفت، هلند، 2011; صص 79-94. [ Google Scholar ]
- ایسیکداغ، یو. زلاتانوا، اس. Underwood، J. یک مدل BIM-oriented برای پشتیبانی از الزامات ناوبری داخلی. محاسبه کنید. محیط زیست سیستم شهری 2013 ، 41 ، 112-123. [ Google Scholar ] [ CrossRef ]
- دیاکیت، AA; زلاتانوا، S. تقسیم بندی فضایی محیط های داخلی پیچیده برای ناوبری سه بعدی داخلی. بین المللی جی. جئوگر. Inf. علمی 2017 ، 32 ، 213-235. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پارک، اس. یو، ک. Kim, J. Data Model for IndoorGML Extension برای پشتیبانی از ناوبری داخلی افراد دارای معلولیت حرکتی. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 66. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- تنجا، س. آکینجی، بی. گرت، جی اچ. Soibelman, L. الگوریتمهای تولید خودکار مدلهای ناوبری از مدلهای اطلاعات ساختمان برای پشتیبانی از تطبیق نقشههای داخلی. خودکار ساخت و ساز 2016 ، 61 ، 24-41. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یانگ، ال. Worboys, M. Generation of Navigation graphs for space indoor. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 1-20. [ Google Scholar ] [ CrossRef ]
- تانگ، اس جی. زو، س. وانگ، WW; Zhang، اشتقاق توپولوژی خودکار YT از مدل ساختمان ifc برای ناوبری هوشمند درون دری. ISPRS Int. قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2015 ، 7–11. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لواندویچ، ای. لیسوفسکی، پ. Flisek، P. یک روش اصلاح شده برای تولید مدل های ناوبری داخلی. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 60. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لین، وای؛ لین، پی.-اچ. Tserng، H. اتوماسیون تولید توپولوژی فضای داخلی برای برنامه ریزی مسیر سه بعدی با استفاده از تکنیک های BIM و 3D-GIS. در مجموعه مقالات سی و چهارمین سمپوزیوم بین المللی اتوماسیون و رباتیک در ساخت و ساز، تایپه، تایوان، 28 ژوئن تا 1 ژوئیه 2017؛ ص 437-444. [ Google Scholar ]
- ژنگ، XZ; تیان، دی. ژانگ، ام. هو، سی. تانگ، ال. مدل تخلیه پله ها با توجه به جریان های ادغام پیاده. گسسته. دین نات Soc. 2019 ، 2019 ، 1–11. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تیل، J.-C. دائو، THD; ژو، ی. سفر در شهر سه بعدی: کاربردها در برنامه ریزی مسیر، ارزیابی دسترسی، تجزیه و تحلیل مکان و فراتر از آن. J. Transp. Geogr. 2011 ، 19 ، 405-421. [ Google Scholar ] [ CrossRef ]
- روه، اس. عزیز، ز. Pena-Mora، FA یک مدل سه بعدی مبتنی بر شی برای نظارت بر پیشرفت ساخت و ساز داخلی. خودکار ساخت و ساز 2011 ، 20 ، 66-75. [ Google Scholar ] [ CrossRef ]
- سانو، تی. یاجیما، م. کادوکورا، اچ. Sekizawa، A. رفتار انسان در یک راه پله در طول یک تمرین تخلیه کامل در یک ساختمان بلند. آتش نشانی. 2016 ، 41 ، 375-386. [ Google Scholar ] [ CrossRef ]
- کوستر، جی. لهمبرگ، دی. Kneidl، A. راه رفتن روی پله ها: آزمایش و مدل. فیزیک Rev. E 2019 , 100 , 022310. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- تسیلیاکو، ای. دیموپولو، ای. تحلیل شبکه سه بعدی برای کاربردهای فضای داخلی. ISPRS Int. قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2016 ، 2 ، 147-154. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Lin, WY تولید یک شبکه داخلی با مسیرهای غیر همسطح بر اساس مدل های IFC و کاربردهای عملی آن. جی. چین. Inst. سیویل هیدرول. مهندس 2019 ، 31 ، 153-162. [ Google Scholar ] [ CrossRef ]
- وانگ، YQ; Lin, WY توسعه ای از نسل هوشمند توپولوژی داخلی (i-GIT) برای مسیرهای غیر همسطح مرتبط با رمپ و آسانسور. در مجموعه مقالات بیست و دومین سمپوزیوم مهندسی و مدیریت ساخت و ساز، تایپه، تایوان، 6 ژوئیه 2018. [ Google Scholar ]
- کانگ، TW; Hong, CH مطالعه ای بر روی معماری نرم افزار برای یکپارچه سازی داده های مدیریت تسهیلات مبتنی بر BIM/GIS. خودکار ساخت و ساز 2015 ، 54 ، 25-38. [ Google Scholar ] [ CrossRef ]
- Galea، ER; شارپ، جی. لارنس، پی. بررسی نمایش رفتار ادغام در طبقه – رابط پله در شبیه سازی های کامپیوتری تخلیه ساختمان های چند طبقه. J. آتش نشانی. مهندس 2008 ، 18 ، 291-316. [ Google Scholar ] [ CrossRef ]
- فایل های نمونه پله و نرده Revit. در دسترس آنلاین: https://revit.downloads.autodesk.com/download/2019RVT_RTM/Docs/InProd/Stair_Samples.rvt (در 23 دسامبر 2019 قابل دسترسی است).
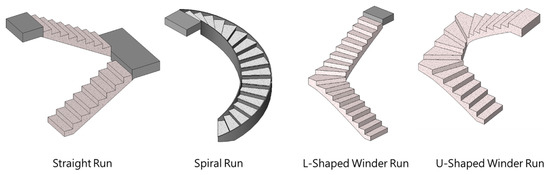
شکل 1. دسته بندی راه پله های رایج.
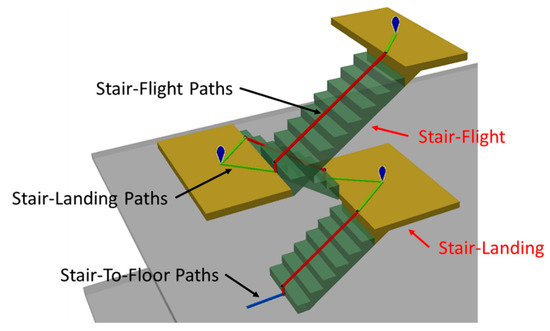
شکل 2. مسیرهای مرتبط با پلکان پیشنهاد شده توسط i-GIT [ 1 ].
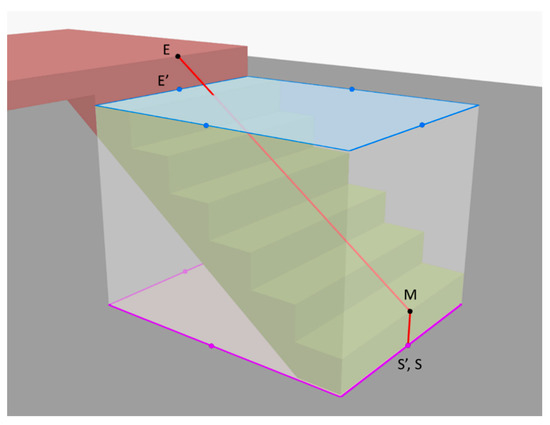
شکل 3. تصویر منطق تولید مسیر پرواز از پله در نسخه دوم الگوریتم نسل هوشمند توپولوژی داخلی (i-GIT) [ 33 ].
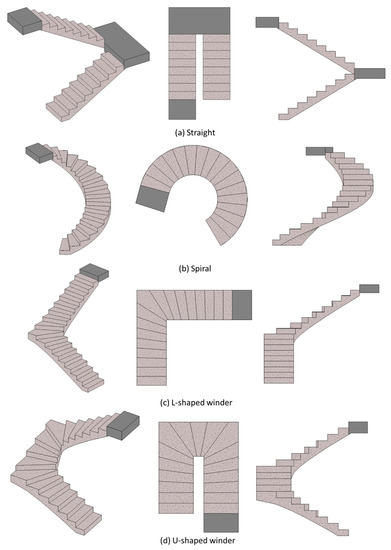
شکل 4. دسته بندی جهت گیری راه پله.
شکل 5. پله های یکپارچه.
شکل 6. پله های غیر یکپارچه.
شکل 7. آج هایی با پروفیل های دماغه ای مختلف.
شکل 8. پله با رایزر.
شکل 9. مسیرهای پله ای که با ( الف ) یک بالابر یا ( ب ) یک آج ختم می شود .

شکل 10. نمای کلی و نمادهای مسیر پله.
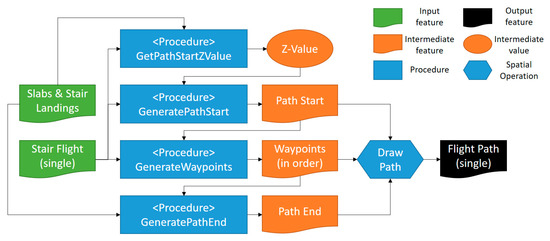
شکل 11. فلوچارت برای تولید مسیر پرواز از پله.
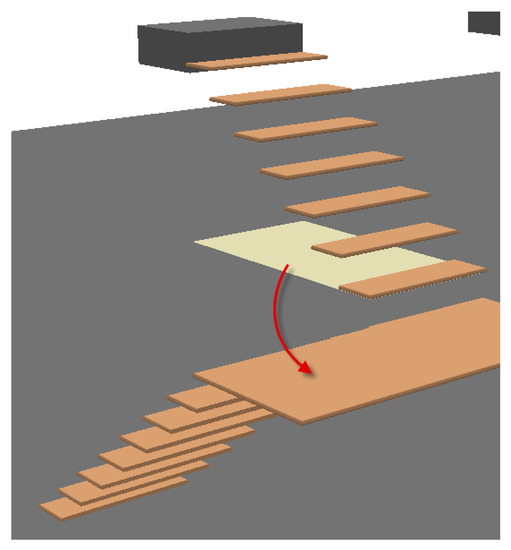
شکل 12. تصویر روش جستجوی دال اتصال یا فرود پله یک پرواز پله.
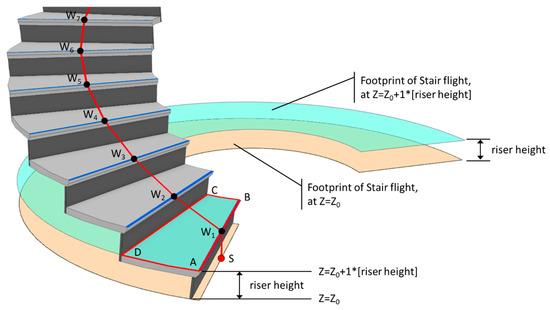
شکل 13. تصویر روش تعیین شروع مسیر و نقاط بین راه.
شکل 14. تصویر روش تعیین لبه جلو ( آب¯) مرحله اول.
شکل 15. تصویر روش تعیین انتهای مسیر.
شکل 16. موارد آزمون انتخاب شده برای تأیید الگوریتم پیشنهادی.
شکل 17. خلاصه ای از نتایج آزمون.
شکل 18. نتایج آزمون برای گروه های 1-3.
شکل 19. نتایج آزمون برای گروه های 4-6.
شکل 20. نتایج آزمون برای گروه های 7-13.


بدون دیدگاه