1. معرفی
اسکن تشخیص نور و محدوده (LiDAR)، از جمله اسکن زمینی LiDAR (TLS) [ 1 ]، اسکن شخصی LiDAR (PLS) [ 2 ]، اسکن موبایل LiDAR (MLS) [ 3 ]، و اسکن LiDAR هوابرد (ALS) [ 4 ] ، می تواند ابرهای نقطه ای متراکم از صحنه های هدف را به طور مستقیم و کارآمد بدست آورد. اسکن LiDAR یکی از پیشرفته ترین فن آوری های سه بعدی (3D) جمع آوری داده های مکانی است. ابرهای نقطه ای به دست آمده توسط اسکن LiDAR در کاربردهای متعددی از جمله مدل سازی سه بعدی شی مورد نظر در مهندسی معکوس [ 5 ]، بازسازی ساختمان های سه بعدی در مدل سازی شهر [ 6 ]، برآورد شیب ها و ارتفاعات فوق العاده در نقشه راه [ 7 ] استفاده می شود.]، نقشه برداری درختان منفرد در جنگلداری [ 8 ]، و تولید مدل دیجیتال ارتفاعی در مقیاس بزرگ (DEM) در مناطق کوهستانی شیب دار [ 9 ].
ثبت یک مشکل اساسی و اغلب در پردازش ابرهای نقطه ای است [ 10 ، 11 ]. اسکن زمینی LiDAR کل صحنه هدف را ایستگاه به ایستگاه اسکن می کند و ثبت برای تراز کردن ابرهای نقطه ای به دست آمده از ایستگاه های مختلف در یک قاب یکپارچه ضروری است [ 12 ، 13 ، 14 ، 15 ، 16 ، 17 ، 18 ]. علاوه بر این، ابرهای نقطه ای به دست آمده توسط پلتفرم های مختلف اسکن LiDAR، مانند TLS و MLS، اغلب ادغام می شوند تا پوشش کامل تری از صحنه های هدف به دست آید. در چنین شرایطی، ثبت ابرهای نقطه پلت فرم مختلف ضروری است [ 19 ،20 ].
هدف از ثبت ابر نقطه به دست آوردن پارامترهای بهینه تبدیل نقاط در یک سیستم مختصات به دیگری است. تبدیل صلب 6 درجه آزادی (DOF) است، اگر هیچ محدودیتی نداشته باشد، و می تواند با استفاده از سه پارامتر ترجمه و سه زاویه چرخش بیان شود. بردار ترجمه را می توان به صورت تی=(تیایکس تیy تیz)تیو بردار چرخش را می توان به عنوان نشان داد θ=(α β γ)تی. ثبت ابرهای نقطه ای متراکم در مقیاس بزرگ معمولاً زمان بر است. برای کارآمدی بیشتر، استراتژی درشت به ریز معمولاً در ثبت ابر نقطه استفاده می شود. پارامترهای تبدیل تقریبی ابتدا از طریق الگوریتم ثبت درشت یافت می شوند و به عنوان مقدار اولیه ثبت خوب عمل می کنند. سپس، الگوریتم ثبت خوب به راه حل بهینه نهایی همگرا می شود. جزئیات استراتژی ثبت نام درشت به ریز را می توان در چنگ و همکاران یافت. [ 10 ].
معروفترین و پرکاربردترین الگوریتمهای ثبت دقیق عبارتند از: نزدیکترین نقطه تکراری (ICP) [ 21 ]، تطبیق سه بعدی حداقل مربعات (LS3D) [ 22 ]، تبدیل توزیعهای عادی (NDT) [ 23 ] و تغییرات آنها [ 24 ، 25 ]. ، 26]. الگوریتم ICP جفتهای نزدیکترین نقطه را در دو مجموعه پیدا میکند و به صورت تکراری پارامترهای ثبت را با به حداقل رساندن فاصله بین نزدیکترین جفتهای نقطه تخمین میزند. برخلاف جفتهای نقطه، الگوریتمهای LS3D سطوح جستجوی سهبعدی را با سطح قالب سهبعدی مطابقت میدهند و پارامتر ثبت را با به حداقل رساندن فواصل اقلیدسی بین سطوح تخمین میزنند. الگوریتم NDT ابرهای نقطهای را به سلولها یا وکسلها تقسیم میکند و یک توزیع نرمال به هر سلول یا وکسل برای مدلسازی محلی احتمال اندازهگیری یک نقطه اختصاص میدهد. پارامترهای ثبت با تطبیق چگالی احتمال تخمین زده می شوند.
از آنجایی که این مقاله به ثبت درشت ابرهای نقطه TLS می پردازد، کارهای مرتبط بررسی شده در بخش بعدی عمدتاً بر روی الگوریتم های ثبت درشت تمرکز خواهند کرد. بصری ترین و قدیمی ترین راه برای دستیابی به ثبت درشت استفاده از اهداف مصنوعی در اسکن داده ها است. اهداف مصنوعی مانند توپ های کروی در صحنه اسکن نصب می شوند و اهداف توسط بیش از یک ایستگاه اسکن اسکن می شوند. مختصات متناظر اهداف در ایستگاههای اسکن متعدد به صورت دستی استخراج میشوند یا بهطور خودکار در فرآیند ثبت برازش میشوند و پارامترهای ثبت توسط جفت مختصات تخمین زده میشوند. گاهی اوقات، جفت مختصات را می توان به صورت دستی با نقاط مشخصه ای مانند گوشه ها در زمانی که اهداف مصنوعی در دسترس نیستند انتخاب کرد.
در جامعه بینایی کامپیوتر، از روشهای «تولید و آزمایش» برای دستیابی به ثبت خودکار درشت ابرهای نقطه استفاده میشود. الگوریتم معروف اتفاق نظر نمونه تصادفی (RANSAC) [ 27] به طور تصادفی سه نقطه را از نقاط مبدا و سه نقطه را از نقاط هدف انتخاب می کند تا یک جفت متناظر تشکیل دهد. یک تبدیل کاندید با استفاده از مطابقت ها تخمین زده می شود و از نقاط باقی مانده برای آزمایش اینکه آیا تبدیل نامزد خوب است یا خیر استفاده می شود. این روند را تا رسیدن به تعداد معین تکرار کنید. بهترین تبدیل به عنوان ثبت نهایی درشت انتخاب می شود. الگوریتمهای RANSAC برای ثبت ابرهای نقطهای نیازی به فرضیات ندارند، اما این نوع روشها اغلب وقتگیر هستند، بهویژه زمانی که برای ابرهای نقطهای متراکم TLS در مقیاس بزرگ استفاده میشوند. برای تسریع الگوریتم RANSAC و قویتر کردن آن، آیگر و همکارانش. [ 28] برای استخراج مجموعههای 4 نقطهای همسطح ابتدا از نقاط مبدا و نقاط هدف پیشنهاد شده است، و مطابقت مجموعههای 4 نقطهای با استفاده از الگوریتم RANSAC پیدا میشود. این الگوریتم به الگوریتم مجموعه های متجانس 4 نقطه ای (4PCS) معروف است. برای تسریع بیشتر الگوریتم 4PCS، Theiler و همکاران. [ 18 ، 29 ، 30 ] ابتدا نقاط کلیدی را از نقاط خام LiDAR استخراج کرد، و تنها نقاط کلیدی استخراج شده برای تخمین پارامترهای ثبت درشت با استفاده از الگوریتم 4PCS استفاده شد. Ge [ 14] ابتدا نقاط کلیدی معنایی را استخراج کرد و سپس نقاط کلیدی استخراج شده را به الگوریتم 4PCS تغذیه کرد تا ابرهای نقطه را درشت ثبت کند. مزایای این روش ها این است که هیچ فرضی در مورد پوزیشن اولیه ندارند و در برابر نویز و نقاط پرت مقاوم هستند، اما این روش ها معمولاً برای ثبت ابرهای نقطه TLS متراکم در مقیاس بزرگ زمان بر و غیرقابل تحمل هستند.
یکی دیگر از تکنیک های ثبت نام درشت استفاده از توصیفگرهای شکل محلی سه بعدی است. نقاط کلیدی ابتدا در نقاط مبدا و مقصد استخراج می شوند و توصیفگرهای شکل محلی سه بعدی برای هر نقطه کلیدی استخراج می شوند. جفتهای مربوطه با تطبیق توصیفگر ویژگی بهدست میآیند، و سپس پارامترهای ثبت درشت با استفاده از جفتهای ویژگی متناظر منطبق برآورد میشوند. روسو و همکاران [ 31 ] یک ویژگی 16 بعدی قوی به نام هیستوگرام های ویژگی پایدار (PFH) را برای دستیابی به ثبت ابرهای چند نقطه ای پیشنهاد کرد. برای بهبود بیشتر کارایی، عبارات ریاضی PFH اصلاح و بهینه می شوند و نوع جدیدی از ویژگی محلی به نام هیستوگرام ویژگی نقطه سریع (FPFH) پیشنهاد شد [ 32 ]. زی و همکاران [ 15] یک توصیفگر کوواریانس تطبیقی برای دستیابی به تراز درشت ابرهای نقطه TLS پیشنهاد کرد. اعتقاد بر این بود که توصیفگر نسبت به تبدیل سفت و سخت ثابت است و در برابر نویز و وضوح های متفاوت مقاوم است. گائو و همکاران [ 33 ] پیشنهاد استفاده از تصویر گاوسی گسترده (EGI) را برای یافتن مطابقتهای نقطهای و در نتیجه دستیابی به ثبت اولیه ابرهای نقطهای ارائه کرد. یو و جو [ 13 ] از آشکارساز نقاط کلیدی امضای شکل ذاتی و امضای هیستوگرام جهت گیری ها (SHOT) استفاده کردند. 34 ]] توصیف کننده برای یافتن مکاتبات از ابرهای نقطه. سپس یک الگوریتم شاخه و کران برای تخمین قوی پارامترهای ثبت با استفاده از تطابق نقطه با تطابق نادرست پیشنهاد شد. از آنجایی که استخراج نقاط کلیدی از ابرهای نقطهای در مقیاس بزرگ زمانبر است و توصیفگرهای شکل محلی سهبعدی معمولاً ابعاد بالایی دارند، روشهای ثبت درشت مبتنی بر توصیفکنندههای شکل محلی سهبعدی معمولاً ناکارآمد هستند.
علاوه بر توصیفکنندههای شکل محلی سهبعدی، ویژگیهای سطح بالا، مانند ویژگیهای خط، ویژگیهای صفحه، و ویژگیهای معنایی نیز برای ثبت ابرهای نقطه LiDAR استفاده میشوند. یانگ و زانگ [ 35 ] پیشنهاد کردند که خطوط تاج را از ابرهای نقطه ای استخراج کنند تا به ثبت درشت دست یابند. Dold و Brenner [ 36 ] تکههای مسطح سهبعدی را از دادههای اسکن لیزری استخراج کردند و با یافتن تکههای مربوطه، ابرهای نقطهای همپوشانی را ثبت کردند. یانگ و همکاران [ 17 ] ابتدا نقاط معنایی را از ابرهای نقطه استخراج کرد و سپس نقاط معنایی را با استفاده از قیود هندسی مطابقت داد. در نهایت، پارامترهای ثبت با استفاده از نقاط معنایی تطبیق برآورد شد. کلبه و همکاران [ 37] موفق به ثبت ابرهای نقطه اسکن لیزری جنگل با استفاده از ساقه درختان استخراج شده از ابرهای نقطه TLS شد.
علاوه بر استفاده مستقیم از ابرهای نقطه سه بعدی، ثبت درشت را می توان با روش های کمک به تصاویر دو بعدی نیز به دست آورد. یانگ و همکاران [ 38 ] پیشنهاد کردند که با استفاده از ویژگیهای تصویر دوبعدی، به همترازی اسکن سهبعدی پایه گسترده دست یابند. برای قویتر کردن ویژگیهای تصویر دو بعدی، ساختارهای مسطح غالب از ابرهای نقطهای استخراج شدند و برای عادیسازی تغییرات زاویه دید دوربین استفاده شدند. بارنیا و فیلین [ 39 ] ابتدا ابرهای نقطه لیزری زمینی سه بعدی را به تصاویر برد پانوراما تبدیل کردند. سپس ویژگیهای کلیدی استخراج و با رویکرد ترکیبی مطابقت داده شد. در نهایت، پارامترهای ثبت نام با ویژگیهای کلیدی همسان برآورد شد. واینمن و همکاران [ 40] پیشنهاد کرد تا ویژگیهای تغییر شکل ویژگی ثابت مقیاس (SIFT) را از تصاویر بازتابی استخراج کند و سپس آنها را به سه بعدی با استفاده از تصاویر محدوده برای به دست آوردن ترکیبات سه بعدی بازتاب دهد. پارامترهای ثبت درشت با استفاده از مزدوجات سه بعدی برآورد شدند.
ثبت درشت یک مرحله کلیدی است که به شدت بر کارایی ثبت ابرهای نقطه تأثیر می گذارد. اگرچه روش های متعددی برای حل این مشکل پیشنهاد شده است، اما همچنان چالش برانگیز است. در اکثر موارد اسکن LiDAR، اسکنر لیزری به طور درشت تراز می شود و حتی در بسیاری از موارد توسط سنسورهای شیب داخلی جبران می شود. در چنین مواردی، چرخش های 3DOF بین دو اسکن فقط به آزیموت محدود می شود و درجات آزادی در ثبت از 6 به 4 کاهش می یابد. Cai et al. [ 12 ] از این محدودیت استفاده کرد و پیشنهاد استفاده از نقاط کلیدی همسان و الگوریتم شاخه و کران را برای دستیابی به ثبت 4DOF کارآمد داد. مشابه کای و همکاران. [ 12]، این مقاله از این محدودیت بهره کامل می برد و روش کارآمد و خودکار دیگری را برای مقابله با مشکل ثبت درشت 4DOF پیشنهاد می کند. روش کارآمد و خودکار پیشنهادی با دو مرحله به دست آمد: (1) تخمین بردار ترجمه افقی و زاویه آزیموت با تطبیق تصاویر ویژگی پیشبینی شده ارتو تولید شده. (2) برآورد ترجمه عمودی، که با تخمین اختلاف ارتفاع مناطق همپوشانی پس از تراز افقی به دست میآید. در مقایسه با روشهای ثبت درشت موجود، مشارکتهای اصلی این مقاله عبارتند از: (1) یک چارچوب دو مرحلهای برای دستیابی به ثبت نام درشت 4DOF پیشنهاد شد. ثبت 4DOF به دو مرحله تجزیه شد. در مرحله اول، بردار انتقال افقی و زاویه آزیموت برآورد شد. در مرحله دوم، ترجمه عمودی برآورد شد. (2) بردار ترجمه افقی و تخمین زاویه آزیموت بر اساس تصاویر ویژگی پیشبینی شده ارتو. به جای استفاده از تصاویر ویژگی پانوراما برای دستیابی به ثبت ابرهای نقطه TLS، این مقاله پیشنهاد کرد که از تصاویر ویژگی پیشبینی شده ارتو برای دستیابی به بردار ترجمه افقی و تخمین زاویه آزیموت استفاده شود.
ادامه این مقاله به شرح زیر سازماندهی شده است. مجموعه دادههای ابر نقطه تجربی و روش ثبت درشت 4DOF در بخش 2 توضیح داده شدهاند . نتایج تجربی در بخش 3 ارائه شده است. بحث در مورد روش پیشنهادی و نتایج تجربی در بخش 4 ارائه شده است. در نهایت، بخش 5 این مقاله را به پایان می رساند.
2. مواد و روشها
2.1. مجموعه دادههای ابر نقطه تجربی
روش پیشنهادی از اطلاعات شدت برای تولید تصاویر مشخصه پیشبینی شده ارتو استفاده میکند. اسکنرهای LiDAR ارائه شده توسط فروشندگان مختلف ویژگی های خود را در مقدار شدت دارند. برای آزمایش سازگاری الگوریتم پیشنهادی به ابرهای نقطهای اسکن شده توسط انواع مختلف اسکنرهای LiDAR، سه مجموعه داده ابر نقطه TLS اسکن شده توسط دو اسکنر مختلف LiDAR به عنوان مجموعه دادههای آزمایشی مورد استفاده قرار گرفتند. اولین مورد با نام “DRIEGL” شامل دو ایستگاه است که توسط اسکنر RIEGL VZ-400 TLS در میدانی در دانشگاه ووهان اسکن شده است. اسکنر RIEGL VZ-400 در جمع آوری داده ها به طور درشت تراز شده است. عرض گام اسکن افقی و عرض گام اسکن عمودی هر دو روی 0.015 درجه در اسکن داده تنظیم شده بودند. ابرهای نقطه استفاده شده توسط RISCAN Pro صادر می شوند [ 41]. قبل از صادرات، ابرهای نقطه به طور خودکار توسط RISCAN Pro با استفاده از داده های سنسور شیب تراز می شوند. ایستگاه 1 در DRIEGL برای نقاط هدف و ایستگاه 2 برای نقاط مبدا استفاده شد. حدود 88.90 میلیون نقطه در ایستگاه 1 و 120.03 میلیون نقطه در ایستگاه 2 وجود دارد. پنج توپ کروی در صحنه نصب شده و توسط هر دو ایستگاه اسکن شده است. ابرهای نقطه ایستگاه 1، ایستگاه 2 و تمام نقاط قبل از ثبت به ترتیب در شکل 1 a-c نشان داده شده است. شکل 1 a,b نمای بالایی از نقاط ایستگاه 1 و ایستگاه 2 است. مثلث های قرمز در شکل 1a,b مکان هایی را نشان می دهد که اسکنرها در جمع آوری داده ها قرار گرفته اند. فاصله بین دو ایستگاه اسکن حدود 20 متر است. مشاهده می شود که بین این دو نقطه ایستگاه چرخشی وجود دارد. در شکل 1 ج، نقطه ایستگاه 1 با رنگ قرمز و نقطه ایستگاه 2 با رنگ آبی رنگ شده است. بدیهی است که این دو نقطه ایستگاه در چارچوب یکپارچه نیستند و نیاز به ثبت دارند.
مجموعه داده دوم “DTRIMBLE-1” نام داشت. دو ایستگاه DTRIMBLE-1 توسط اسکنر لیزری Trimble SX10 TLS (اسکن کل ایستگاه) اسکن شدند. مشابه DRIEGL، اسکنر لیزری در حین جمع آوری داده ها تراز شد. عرض مرحله اسکن Trimble SX10 قابل تنظیم است. پهنای مرحله اسکن روی مقداری بزرگتر از اسکنر لیزری RIEGL VZ-400 تنظیم شد، بنابراین چگالی نقطه DTRIMBLE-1 کمتر از DRIEGL بود. حدود 5.63 میلیون نقطه در ایستگاه 1 و 5.56 میلیون نقطه در ایستگاه 2 وجود داشت. ایستگاه 1 برای نقاط هدف و ایستگاه 2 برای نقاط مبدا که نیاز به ثبت دارند استفاده شد. نقاط مبدا، نقاط هدف و تمام نقاط قبل از ثبت DTRIMBLE-1 به ترتیب در شکل 1 d-f نشان داده شده اند. شبیه بهدر شکل 1 a,b، موقعیت هایی که اسکنرها در آن قرار داشتند با یک مثلث قرمز مشخص شده اند. مشاهده می شود که دو ایستگاه تقریباً در یک مکان اسکن شده اند، اما زاویه چرخش زیادی بین دو ایستگاه وجود دارد. مشابه DRIEGL، نقطه ایستگاه 1 با رنگ قرمز و نقطه ایستگاه 2 به رنگ آبی در شکل 1 f رنگ شده است. شکل 1 f نشان می دهد که این دو نقطه ایستگاه در یک چارچوب مختصات یکپارچه نیستند و نیاز به ثبت دارند.
مجموعه داده سوم “DTRIMBLE-2” نام داشت. دو ایستگاه DTRIMBLE-2 با استفاده از اسکنر و پارامترهای اسکن مشابه DTRIMBLE-1 اسکن شدند. بر خلاف اسکن دو ایستگاه تقریباً در همان مکان DTRIMBLE-1، دو ایستگاه DTRIMBLE-2 در دو ایستگاه با فاصله حدود 16 متر اسکن شدند، همانطور که با مثلث های قرمز در شکل 1 g,h نشان داده شده است. حدود 5.29 میلیون نقطه در ایستگاه 1 و 5.61 میلیون نقطه در ایستگاه 2 وجود دارد. شکل 1 نشان می دهد که دو نقطه ایستگاه DTRIMBLE-2 در یک سیستم مختصات یکپارچه نیستند.
علاوه بر DRIEGL، DTRIMBLE-1 و DTRIMBLE-2، برای ارزیابی تأثیر تغییرات دیدگاه و انسداد ابرهای نقطه TLS بر روی ثبت تصویر مشخصه پیشبینی شده ارتو، ایستگاه 1 DRIEGL برای شبیهسازی دوتایی ابرهای نقطه TLS استفاده میشود. همانطور که در شکل 2 الف نشان داده شده است، نقاط ایستگاه 1 در DRIEGL به دو قسمت با همپوشانی تقسیم می شوند: (1) قسمت 1 در جعبه فیروزه ای. و (2) قسمت 2 در جعبه سیاه. 78.30 میلیون امتیاز در قسمت 1 و 83.63 میلیون امتیاز در قسمت 2 وجود دارد. نکات قسمت 2 برای اولین بار در ایکس، y، و z1.0 متر به طور جداگانه. سپس نقاط در اطراف چرخانده می شوند zمحور 45 درجه نقاط قسمت 1 و نقاط تبدیل شده قسمت 2 در شکل 2 ب نشان داده شده است. پس از تبدیل، نقاط قسمت 2 در یک سیستم مختصات متفاوت از قسمت 1 قرار دارند. مجموعه داده شبیه سازی شده به عنوان “DSimRIEGL” نامگذاری شده است.
2.2. روش ثبت درشت مبتنی بر تصویر ویژگی طرحریزی شده Ortho
ثبت ابرهای نقطه ای به معنای یافتن پارامترهای تبدیل بهینه بین ابرهای نقطه ای اسکن شده از ایستگاه های اسکن مختلف است. اگر دو نقطه وجود دارد، به عنوان نشان داده شده است پو پ”، تبدیل بین این مجموعه های دو نقطه ای را می توان به صورت توصیف کرد
جایی که (ایکس y z)تیمختصات نقطه در ابر نقطه مبدا را نشان می دهد پ، و (ایکس” y” z”)تیمختصات نقطه در ابر نقطه هدف را نشان می دهد پ”. (تیایکس تیy تیz)تیو (α β γ)تیبه ترتیب پارامترهای ثبت، بردار ترجمه و بردار زاویه چرخش هستند که باید تخمین زده شوند. آر(α β γ)ماتریس چرخش است که از بردار چرخش محاسبه می شود.
اگر اسکنر در اکتساب داده ها تراز شود، چرخش بین نقطه مبدا و نقطه هدف به اطراف کاهش می یابد. زفقط محور سپس تبدیل بین نقطه منبع پو نقطه هدف پ”می توان از رابطه (1) به معادله (2) ساده کرد. در چنین شرایطی، هدف از ثبت، برآورد بردار ترجمه است (تیایکس تیy تیz)تیو زاویه آزیموت γ.
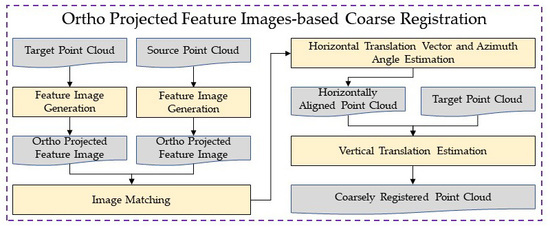
این مقاله از این واقعیت بهره می برد که در بسیاری از موارد اسکنر لیزری TLS با سنسورهای شیب در اسکن LiDAR زمینی تراز و/یا جبران می شود. فقط بردار ترجمه (تیایکس تیy تیz)تیو زاویه آزیموت γبرای ثبت درشت چنین ابرهای نقطه ای کافی است و بنابراین درجه آزادی از 6 به 4 کاهش می یابد. شکل 3 گردش کار روش ثبت درشت 4DOF پیشنهادی را نشان می دهد. برای بهبود کارایی ثبت درشت، ثبت درشت 4DOF به دو مرحله تجزیه می شود: (1) تخمین بردار ترجمه افقی (تیایکس،تیy)و زاویه آزیموت γ; و (2) برآورد ترجمه عمودی تیz. تخمین بردار ترجمه افقی و زاویه آزیموت با ثبت تصاویر مشخصه پروژکتیو ارتو تولید شده به دست می آید که در بخش 2.2.1 و بخش 2.2.2 به تفصیل توضیح داده شده است . ترجمه عمودی با تفاوت ارتفاع نقاط مبدا و نقاط هدف در مناطق همپوشانی پس از تراز افقی تخمین زده می شود که به طور مفصل در بخش 2.2.3 توضیح داده شده است .
2.2.1. Ortho Projected Feature Image Generation
برای تولید تصاویر مشخصه پیش بینی شده ارتو از نقاط مبدا و نقاط هدف، وضوح شبکه تصویر را مشخص کنید اسابتدا مشخص می شود. سپس، حداقل مقدار از ایکس، y، و zمختصات یافت می شود، به عنوان نشان داده شده است ایکسمترمنn، yمترمنn، و zمترمنn،به ترتیب. یک نقطه پ(ایکس،y،z)در ابر نقطه به پیکسل تصویر با شماره ردیف و شماره ستون که با معادله (3) و معادله (4) محاسبه شده است، اختصاص داده می شود. مننتی(.) به معنای مقدار صحیح کف است.
ممکن است بیش از یک نقطه در همان پیکسل تصویر تصویر مشخصه قرار گیرد. مقدار پیکسل با میانگین شدت و ارتفاع متوسط تمام نقاطی که در یک پیکسل تصویر قرار دارند محاسبه می شود. در ابتدا، میانگین شدت و ارتفاع نقاطی که در همان پیکسل قرار دارند محاسبه می شود. سپس، میانگین شدت و ارتفاع متوسط با استفاده از مقادیر حداکثر و حداقل شدت و ارتفاع، به [0، 255] مقیاس میشوند. اطلاعات شدت با معادله (5)، که در آن nتعداد نقاط در همان پیکسل تصویر است، rمنمقدار شدت نقطه i است، rمترمنnو rمترآایکسمقدار حداقل شدت و مقدار حداکثر شدت ابر نقطه است. اطلاعات ارتفاع از رابطه (6) به دست می آید که در آن zمنارتفاع/ارتفاع نقطه i است. zمترمنnو zمترآایکسحداقل و حداکثر ارتفاع ابر نقطه هستند. مقدار پیکسل نهایی با ترکیب اطلاعات شدت و ارتفاع مطابق با معادله (7) محاسبه می شود. αپارامتری است که نسبت نسبی اطلاعات شدت و اطلاعات ارتفاع را در مقدار پیکسل نهایی تعیین می کند.
2.2.2. بردار ترجمه افقی و تخمین زاویه آزیموت
تصاویر مشخصه تولید شده توسط بخش 2.2.1 ، تصاویر ویژه طرح ریزی شده ارتو هستند. بردار ترجمه و زاویه آزیموت برای تراز کردن تصاویر ویژگی ارتو پیش بینی شده مانند بردار ترجمه افقی و زاویه آزیموت بین نقاط مبدا و نقاط هدف است. بنابراین، تخمین بردار ترجمه افقی و زاویه آزیموت بین نقاط مبدا و نقاط هدف را می توان با ثبت تصویر تصاویر مشخصه طرح ریزی شده ارتو بدست آورد. در این مقاله، ویژگی SIFT پیشنهاد شده توسط Lowe [ 42 ، 43] برای شناسایی نقاط کلیدی متمایز و استخراج توصیفگرهای ویژگی محلی از تصاویر ویژگی پیشبینی شده ارتو تولید شده از نقاط مبدا و مقصد استفاده میشود. توصیفگر SIFT نسبت به مقیاس و چرخش تصویر ثابت است، و اعتقاد بر این است که به اندازه کافی قوی است تا اعوجاج، تغییرات دیدگاه سه بعدی و تغییرات روشنایی را ایجاد کند. از آنجایی که تفاوتهای بین تصاویر ویژگی پیشبینی شده ارتو از نقاط مبدأ و هدف عمدتاً شامل چرخش تصویر و تغییرات دیدگاه سهبعدی است، SIFT برای تشخیص نقاط کلیدی و استخراج توصیفگر ویژگی محلی تصاویر ویژگی طرحشده ارتو مناسب است. جزئیات ویژگی SIFT را می توان در Lowe [ 42 ، 43 ] یافت.
پس از استخراج توصیفگرهای SIFT از تصاویر ویژگی، نقاط کلیدی از تصویر ویژگی منبع مطابقت داده می شوند کنزدیکترین نقاط کلیدی استخراج شده از نقاط هدف دارای تصویر هستند، با استفاده از فاصله اقلیدسی توسط الگوریتم تقریبی نزدیکترین همسایه [ 44 ]. همسان کنزدیکترین نقاط کلیدی بر اساس فاصله اقلیدسی مرتب می شوند. در همسان کنزدیکترین نقاط کلیدی، نسبت فاصله بین نزدیکترین فاصله و دومین فاصله نزدیکترین نشانگر خوبی است که کیفیت مسابقه را منعکس می کند. هرچه نسبت فاصله کمتر باشد، تطابق بهتری دارد. فقط برای رزرو مکاتبات قابل اعتماد، نتایج مطابق با نسبت فاصله بزرگتر از 0.6 حذف می شوند.
نتایج مطابقت تصویر در سیستم مختصات پیکسل تصویر است. برای تخمین بردار ترجمه افقی و زاویه آزیموت بین نقاط مبدأ و نقاط هدف، مختصات نتایج تطابق تصویر در سیستم مختصات اسکنر با معادلات (8) و (9) بازسازی میشوند، جایی که توو vنقاط کلیدی در سیستم مختصات پیکسل تصویر هستند، ایکسمترمنnو yمترمنnحداقل هستند ایکسو yمختصات، اسوضوح شبکه تصویر است.
نقاط کلیدی در نقاط مبدا و نقاط هدف به صورت مشخص شده اند پاسو پتی. بردار ترجمه افقی و زاویه آزیموت با استفاده از تخمین زده می شود پاسو پتیبا رویکرد تجزیه ارزش منفرد (SVD) [ 45 ]. اول، مرکز از پاسو پتیاز طریق معادلات (10) و (11)، جایی که نتعداد نقاط کلیدی است. سپس یک ماتریس اچ، مشابه ماتریس کوواریانس، توسط رابطه (12) جمع شده و به تجزیه می شود. U، اس،Vتوسط الگوریتم SVD، همانطور که در معادله (13) توضیح داده شده است. ماتریس چرخش از نقاط مبدا به نقاط هدف را می توان با محاسبه کرد Vو U، با استفاده از رابطه (14). زاویه آزیموت را می توان به راحتی از ماتریس چرخش محاسبه کرد. در نهایت، بردار ترجمه افقی را می توان با رابطه (15) تخمین زد.
2.2.3. تخمین ترجمه عمودی
نقاط مبدا ابتدا با استفاده از بردار ترجمه افقی و زاویه آزیموت که با روشی که در بخش 2.2.2 توضیح داده شده است، تبدیل می شوند تا نقاط مبدا به صورت افقی با نقاط هدف تراز شوند. از آنجایی که نقطه منبع و هدف به صورت افقی تراز شده اند، می توان ترجمه عمودی را با تفاوت ارتفاع نقاط مبدا و نقاط هدف در مناطق همپوشانی تخمین زد. برای تخمین اختلاف ارتفاع در مناطق همپوشانی، یک شبکه با اندازه سلول برابر با وضوح شبکه تصویر ایجاد می شود. اس. تمام نقاط منبع و هدف به شبکه اختصاص داده شده است. برای یک سلول شبکه سیدر منطقه همپوشانی، میانگین zارزش نقاط مبدا و نقاط هدف واقع در سلول سیبه طور جداگانه محاسبه می شوند و به عنوان نشان داده می شوند مترzسیاسو مترzسیتی. بنابراین، اختلاف ارتفاع بین مترzسیاسو مترzسیتی، نشان داده شده است دzسی، محاسبه می شود. ترجمه عمودی بین نقاط مبدا و نقاط هدف با میانگین همه تخمین زده می شود دzسیدر مناطق همپوشانی سپس نقاط مبدأ با استفاده از ترجمه عمودی تخمین زده شده به صورت عمودی با نقاط هدف تراز می شوند.
2.2.4. معیارهای ارزیابی دقت
از آنجایی که روش پیشنهادی Ortho Projected Feature Images (OPFI) ابر نقطه مبدا را به نقطه هدف در جهت افقی و عمودی به طور جداگانه ثبت می کند، این مقاله دقت نقاط منبع ثبت شده را در جهت افقی و عمودی به طور جداگانه با استفاده از نقاط حقیقت زمین ارزیابی می کند. . فاصله افقی و فاصله عمودی بین i مین نقطه ثبت شده و نقطه حقایق زمینی متناظر با آن محاسبه و به صورت نشان داده می شود. دساعتمنو دvمن. خطای میانگین مربعات ریشه افقی (HRMSE) و خطای میانگین مربعات ریشه عمودی (VRMSE) با رابطه (16) و معادله (17) محاسبه می شوند. در معادلات (16) و (17)، نتعداد امتیازهای ثبت شده است. HRMSE و VRMSE کوچک نشان دهنده دقت ثبت خوب است.
3. نتایج
مجموعه داده های ابرهای نقطه ای شرح داده شده در بخش 2.1 برای انجام آزمایش ها برای تأیید روش پیشنهادی استفاده می شود. DSimRIEGL، DRIEGL، DTRIMBLE-1، و DTRIMBLE-2 همگی با روش پیشنهادی مبتنی بر تصویر ویژگی طرحریزی شده ارتو ثبت میشوند. ابتدا، تصاویر مشخصه پیشبینی شده ارتو از نقاط مبدا و نقاط هدف با وضوح شبکه تصویر 0.1 متر تولید میشوند. در تولید تصویر ویژگی، αمقدار روی 0.5 تنظیم شده است تا از اطلاعات شدت و ارتفاع استفاده کنید. علاوه بر این، برای جلوگیری از پیکسل های خالی در مقیاس بزرگ در تصاویر ویژگی، نقاط با فاصله اسکن بزرگتر از 100 متر برای DSimRIEGL و DRIEGL حذف می شوند. ابر نقطه ای به دست آمده توسط اسکنر Trimble SX10 بسیار پراکنده تر از ابرهای نقطه ای به دست آمده توسط RIEGL VZ-400 است و نقاط با فاصله اسکن بزرگتر از 70 متر برای DTRIMBLE-1 و DTRIMBLE-2 حذف می شوند.
سپس ویژگیهای SIFT از تصاویر ویژگی پیشبینی شده ارتو تولید شده استخراج میشوند و با آن مطابقت داده میشوند کالگوریتم نزدیکترین همسایه شکل 4 تصاویر ویژگی ارتو تولید شده و نتایج تطبیق SIFT را نشان می دهد. در شکل 4 الف تا د، قسمتهای سمت چپ، تصاویر مشخصه طرحریزی شده ارتو هستند که از نقاط هدف تولید میشوند، و قسمتهای سمت راست، تصاویر ویژگی طرحریزی شده ارتو هستند که از نقاط مبدا تولید میشوند. اشیاء مختلف مانند مربع ها، ساختمان ها و درختان را می توان به وضوح در تصاویر مشخص تشخیص داد. تطابق نقاط کلیدی مطابق با یک خط رنگی به هم متصل می شوند. در مجموع 1484 مکاتبات برای DSimRIEGL مطابقت داده شد. برای نشان دادن واضح تر نتایج تطبیق SIFT، فقط نتایج تطبیق SIFT با نسبت فاصله کوچکتر از 0.1 (16 جفت) ترسیم می شوند. شکل 4 ترسیم شده است.آ. در مجموع 65 مکاتبات، 251 مکاتبات و 23 مکاتبات به ترتیب برای DRIEGL، DTRIMBLE-1 و DTRIMBLE-2 مطابقت داده شد. برای واضحتر نشان دادن مکاتبات، تنها پنج مکاتبات نماینده انتخاب و در شکل 4 b-d ترسیم شدند. تطابق تطبیق در DRIEGL، DTRIMBLE-1 و DTRIMBLE-2 بسیار کمتر از DSimRIEGL است، که نشان می دهد که تغییرات دیدگاه و انسداد در اسکن TLS بر نتیجه تطبیق SIFT تأثیر می گذارد. اما نتایج نشان میدهد که مطابقتهای صحیح کافی را میتوان از تصاویر ویژگی پیشبینی شده ارتو که از ابرهای نقطه TLS شبیهسازیشده و واقعی گرفته شده برای انجام ثبت 4DOF پیدا کرد.
پس از اینکه مطابقتهای کافی از تصاویر مشخصه پیشبینی شده ارتو پیدا شد، بردار ترجمه افقی و زاویه آزیموت با استفاده از مطابقتهای همسان برآورد شدند. سپس با استفاده از بردار ترجمه افقی تخمینی و زاویه آزیموت، نقاط مبدا به صورت افقی با نقاط هدف تراز شدند. سپس ترجمه عمودی با اختلاف ارتفاع نقاط مبدا و نقاط هدف در مناطق همپوشانی پس از تراز افقی برآورد شد. شکل 5 نتایج ثبت DSimRIEGL، DRIEGL، DTRIMBLE-1 و DTRIMBLE-2 را نشان می دهد.شکل 5a1,b1,c1,d1 به ترتیب مروری بر نتیجه ثبت نام DSimRIEGL، DRIEGL، DTRIMBLE-1 و DTRIMBLE-2 را نشان می دهد. نقاط هدف با رنگ قرمز و نقاط مبدا پس از ثبت به رنگ سبز رنگ می شوند. از شکل 5 a1,b1,c1,d1 مشاهده می شود که نقاط مبدا ثبت شده به خوبی با نقاط هدف مطابقت دارند که نشان می دهد نقاط مبدا به خوبی در نقاط هدف ثبت شده اند. برای شناسایی دقیقتر نتایج ثبت، بخش کوچکی از نتایج ثبت هر مجموعه داده (که در کادر سیاه در شکل 5 a1,b1,c1,d1 نشان داده شده است) بزرگنمایی شده و در شکل 5 a2,b2,c2,d2 نشان داده شده است. . از شکل 5 قابل مشاهده استa2,b2,c2,d2 که دیوارهای اسکن شده از نقاط هدف و نقاط مبدا به خوبی با یکدیگر مطابقت دارند که نشان می دهد نقاط مبدا دقیقاً در نقاط هدف ثبت شده اند.
برای مقایسه نتیجه ثبت OPFI با سایر روشهای پیشرفته، چهار مجموعه داده نیز با روش FMP-BnB [ 12 ]، روش BnB [ 12 ]، نسخه 4DOF روش بلند کردن (LM) ثبت شدند. [ 46 ] و روش 4DOF RANSAC [ 27 ]. کدهای C++ این الگوریتم ها توسط Cai و همکاران پیاده سازی شده است. [ 47 ] استفاده شد. کدهای ++C از طریق مخزن GitHub قابل دسترسی هستند ( https://github.com/ZhipengCai/Demo—Practical-optimal-registration-of-terrestrial-LiDAR-scan-pairs). مقادیر پارامترهای پیشفرض مورد استفاده در کدهای ++C به کار گرفته شد. برای ارزیابی نتایج ثبت ابتدا صحت زمینی پارامترهای ثبت و نتایج ثبت به دست می آید. برای مجموعه داده DSimRIEGL، نقاط قسمت 2 بدون تبدیل به عنوان حقیقت پایه استفاده می شود. بردار ترجمه -1.0 متر اینچ است ایکس، y، و z. زاویه آزیموت 45- درجه است. حقیقت پایه DRIEGL با ثبت درشت مبتنی بر نشانگر مصنوعی و الگوریتم ثبت دقیق ICP به دست میآید. مختصات پنج توپ کروی در صحنه با اتصال توپ در نرم افزار تجاری RISCAN Pro [ 41 ] به دست آمد و برای ثبت درشت ایستگاه 2 نقطه به ایستگاه 1 استفاده شد. سپس الگوریتم ICP برای نتیجه ثبت درشت اعمال شد. پارامترهای ثبت در نهایت توسط جفت نقطه قبل و بعد از ثبت محاسبه شد. حقیقت پایه DTRIMBLE-1 و DTRIMBLE-2 توسط ثبت نام درشت مبتنی بر مکاتبات نقطه ای انتخاب شده و الگوریتم ثبت دقیق ICP به دست آمد. پنج مکاتبات نقطه به صورت دستی از ایستگاه 2 و ایستگاه 1 با استفاده از نرم افزار متن باز CloudCompare [48 ]. ثبت نام درشت با استفاده از پنج تناظر نقطه انتخاب شده به دست آمد. سپس الگوریتم ICP برای نتیجه ثبت درشت اعمال شد. مشابه مجموعه داده DRIEGL، پارامترهای ثبت با استفاده از جفت نقطه قبل و بعد از ثبت محاسبه شد.
شکل 6 دقت پارامترهای ثبت تخمینی را نشان می دهد. برای مجموعه داده DSimRIEGL، دقت بردار ترجمه همه الگوریتمها بهتر از 0.05 متر و دقت زاویه آزیموت بهتر از 0.025 درجه است. روش RANSAC بهترین دقت را در تخمین برداری ترجمه و روش OPFI بهترین دقت را در تخمین زاویه آزیموت به دست می آورد. برای مجموعه داده DRIEGL، روش OPFI بهترین دقت را در برآورد بردار ترجمه افقی به دست می آورد. دقت ترجمه عمودی OPFI بهتر از روش های FMP-BnB و BnB است. دقت زاویه آزیموت OPFI بهتر از روش RANSAC است. برای مجموعه داده DTRIMBLE-1، OPFI به بهترین دقت در ترجمه عمودی و x دست می یابد-جهت ترجمه افقی دقت زاویه آزیموت همه الگوریتم ها بهتر از 0.16 درجه است. برای مجموعه داده DTRIMBLE-2، OPFI به دقت ترجمه عمودی بسیار بهتری نسبت به چهار الگوریتم دیگر دست می یابد و دقت بهتری نسبت به FMP-BnB و BnB در جهت x و y به دست می آورد. علاوه بر این، روش OPFI نسبت به سایر الگوریتمها به جز RANSAC به دقت زاویهی آزیموت بهتری دست مییابد.
جدول 1 و جدول 2HRMSE و VRMSE نتایج ثبت شده با روش OPFI و مقایسه را نشان می دهد. برای مجموعه داده DSimRIEGL، HRMSE OPFI 0.06 متر و کمی بدتر از چهار الگوریتم دیگر است. VRMSE OPFI مانند روشهای LM و RANSAC است و بهتر از روشهای FMP-BnB و BnB است. برای مجموعه داده DRIEGL، HRMSE OPFI بهتر از روشهای FMP-BnB، BnB و LM و کمی بدتر از روش RANSAC است. VRMSE OPFI بهتر از روشهای FMP-BnB و BnB و کمی بدتر از روشهای LM و RANSAC است. برای مجموعه داده DTRIMBLE-1، حتی اگر HRMSE OPFI بزرگتر از چهار الگوریتم دیگر است، باز هم بهتر از 0.1 متر است. VRMSE OPFI همانند LM است و بهتر از FMP-BnB، BnB و RANSAC است. برای مجموعه داده DTRIMBLE-2، OPFI به HRMSE قابل مقایسه با الگوریتم RANSAC دست می یابد. و بهتر از سه الگوریتم دیگر است. OPFI بهترین VRMSE را در بین پنج الگوریتم برای مجموعه داده DTRIMBLE-2 به دست می آورد. نتایج درجدول 1 و جدول 2 نشان می دهد که روش پیشنهادی OPFI می تواند به دقت ثبت سانتی متر دست یابد و دقت آن با سایر روش های پیشرفته قابل مقایسه است.
شکل 7 خطای ثبت هر نقطه در هر مجموعه داده را به عنوان یک نقشه حرارتی نشان می دهد. فاصله اقلیدسی سه بعدی بین یک نقطه پس از ثبت و نقطه متناظر آن در داده های مرجع به عنوان خطای ثبت استفاده شد. رنگ هر نقطه از آبی تا قرمز نشان دهنده بزرگی خطای ثبت است. از شکل 7 الف تا د مشاهده می شود که بیشتر امتیازها با دقت خوبی ثبت شده اند (نقاط آبی و سبز). برخی از نقاط (نقاط قرمز در شکل 7 الف تا د) با فواصل اسکن طولانی در مقایسه با نقاط با فواصل اسکن کوتاهتر، دقت ثبت نسبتاً پایینتری دارند.
روش پیشنهادی OPFI و روشهای مقایسه همگی با استفاده از C++ اجرا میشوند. تمام آزمایش ها بر روی یک لپ تاپ با CPU Intel Core i9-8950 HK و حافظه 32 گیگابایتی انجام شد. زمان اجرای روش پیشنهادی OPFI و روش های مقایسه ثبت شد و در شکل 8 نشان داده شده است. برای OPFI، زمان تولید تصویر ویژگی پیشبینیشده ارتو، تطابق تصویر ویژگی پیشبینی شده ارتو، بردار ترجمه افقی و تخمین آزیموت، تخمین بردار ترجمه عمودی، و تبدیل نقاط مبدا گنجانده شده است. برای هر چهار مجموعه داده، روش OPFI پیشنهادی در مقایسه با چهار الگوریتم دیگر کمترین زمان را میگیرد. زمان استفاده شده توسط روش OPFI پیشنهادی کمتر از نصف زمان چهار الگوریتم دیگر است. این نتیجه نشان می دهد که روش پیشنهادی در مقایسه با چهار الگوریتم دیگر کارآمدتر است.
4. بحث
4.1. تنظیم پارامتر
وضوح شبکه تصویر استصویر ویژگی ممکن است بر دقت تخمین بردار ترجمه افقی و زاویه آزیموت تأثیر بگذارد. از نظر تئوری، هرچه وضوح شبکه تصویر کوچکتر باشد، دقت بالاتری دارد. اما در واقعیت، وضوح شبکه تصویر باید با توجه به چگالی ابر نقطه تنظیم شود. وضوح شبکه تصویر کوچکتر از چگالی ابر نقطه ای منجر به ایجاد پیکسل های خالی بیش از حد در تصویر ویژگی می شود و بنابراین بر ثبت تصاویر ویژگی تأثیر می گذارد. ما از مجموعه داده DSimRIEGL استفاده کردیم و وضوح شبکه تصویر را از 0.05 متر تا 0.5 متر تنظیم کردیم تا از تأثیر وضوح شبکه تصویر بر دقت ثبت نامطلوب سوء استفاده کنیم. در آزمایش، αمقدار در تولید تصویر ویژگی روی 0.5 تنظیم شد. شکل 9 دقت ثبت درشت را با وضوح تصویر شبکه متفاوت نشان می دهد. دقت افقی به وضوح شبکه تصویر حساس تر است و دقت عمودی تقریباً تحت تأثیر وضوح شبکه تصویر قرار نمی گیرد. دقت ثبت افقی حدود نیمی از وضوح شبکه تصویر را می توان با روش ثبت درشت پیشنهادی به دست آورد.
ارزش αدر ویژگی تولید تصویر، سهم اطلاعات شدت و ارتفاع را در تصویر نهایی مشخص میکند و بنابراین بر ثبت تصاویر ویژگی تأثیر میگذارد. شکل 10 تعداد تناظرهای صحیح SIFT مطابق با موارد مختلف را نشان می دهد αارزش های. شکل 10 نشان می دهد که شدت به خوبی به ثبت تصویر ویژگی SIFT کمک می کند. هر چه بزرگتر باشد αمقدار، هرچه مکاتبات SIFT بیشتری پیدا شود. اما کی αبزرگتر از 0.6 است، تعداد مکاتبات SIFT منطبق به آرامی افزایش می یابد. به منظور استفاده کامل از اطلاعات شدت و ارتفاع، αتوصیه می شود مقدار را روی مقداری بین 0.5 و 0.7 تنظیم کنید.
4.2. ثبت ابرهای نقطه ای با تراکم نقطه ای متفاوت
چگالی ابرهای نقطه ای در کاربردهای مختلف متفاوت است. مناسب بودن برای ابرهای نقطه ای با چگالی متفاوت برای روش ثبت درشت مهم است. شکل 11 نتایج ثبت درشت ابرهای نقطه ای با چگالی نقطه ای متفاوت را نشان می دهد. ابرهای نقطه ای به طور عمدی با وضوح 0.05 متر تا 0.5 متر توسط یک الگوریتم نمونه شبکه وکسل نمونه برداری می شوند. در تولید تصویر ویژگی، مقدار وضوح شبکه تصویر برابر با وضوح نقطه تنظیم می شود. شکل 11 نشان می دهد که دقت عمودی تقریباً تحت تأثیر وضوح نقطه قرار نمی گیرد. هر چه رزولوشن ابر نقطه بزرگتر باشد، دقت ثبت بدتر است. دقت افقی حدود نیمی از وضوح نقطه است.
4.3. دقت و کارایی
در آزمایشها، روش ثبت درشت پیشنهادی ثبت درشت DSimRIEGL، DRIEGL، DTRIMBLE-1 و DTRIMBLE-2 را انجام داد. دقت افقی ثبت درشت برای DSimRIEGL، DRIEGL، DTRIMBLE-1 و DTRIMBLE-2 به ترتیب 0.06، 0.02، 0.07 و 0.07 متر است. دقت عمودی به ترتیب 0.01، 0.02، 0.01 و 0.01 متر است. دقت ثبت با الگوریتم FMP-BnB، BnB، LM و RANSAC قابل مقایسه است. نتایج تجربی نشان می دهد که دقت ثبت سانتی متر را می توان با روش پیشنهادی OPFI بدست آورد که برای ثبت درشت کافی است.
در آزمایشها، روش پیشنهادی OPFI تنها دهها ثانیه طول میکشد تا به ثبت درشت میلیونها نقطه TLS برسد. در مقایسه با الگوریتمهای FMP-BnB، BnB، LM، و RANSAC، روش OPFI پیشنهادی کمتر از نیمی از زمان را برای ثبت مجموعه دادههای مشابه زمان میبرد. بسیار کارآمدتر است. روش پیشنهادی OPFI جایگزینی برای ثبت درشت کارآمد و خودکار ابرهای نقطه TLS متراکم در مقیاس بزرگ ارائه میکند.
4.4. استحکام تطبیق تصویر ویژگی
تطبیق دقیق و قوی تصویر ویژگی کلید روش ثبت نام درشت OPFI 4DOF است. به دلیل انسداد، دیدگاه های مختلف و تغییرات شدت [ 49] از ابرهای نقطه TLS، تطبیق تصاویر ویژگی دشوار و چالش برانگیز است. مطابقت های تطبیق SIFT DRIEGL، DTRIMBLE-1 و DTRIMBLE-2 بسیار کمتر از DSimRIEGL است. این نشان می دهد که تطبیق ویژگی SIFT تصاویر ویژگی ارتو تحت تأثیر انسداد، دیدگاه های مختلف و تغییرات شدت ابرهای نقطه TLS قرار می گیرد. تطبیق ویژگی SIFT ممکن است در برخی موارد مطابقت کافی را پیدا نکند، به خصوص برای ابرهای نقطه ای که توسط اسکنرهای لیزری مختلف و پلت فرم های مختلف به دست آمده اند. خطوط یا لبه ها نسبت به انسداد، تغییر دیدگاه و تغییر شدت تغییر ناپذیرتر هستند. مبتنی بر خط [ 50 ، 51 ] یا مبتنی بر لبه [ 52] روش های تطبیق تصویر را می توان برای بهبود استحکام تطبیق تصویر ویژگی به کار برد.
5. نتیجه گیری ها
برای بهبود راندمان ثبت درشت ابرهای نقطه TLS متراکم در مقیاس بزرگ، این مقاله با در نظر گرفتن کامل این واقعیت که اسکنر لیزری معمولاً توسط سنسورهای شیب داخلی در اکتساب داده ها تراز و جبران می شود، مشکل ثبت 6DOF را به 4DOF کاهش داد. . یک چارچوب ثبت درشت 4DOF کارآمد و خودکار پیشنهاد شده است. در چارچوب پیشنهادی، بردار ترجمه افقی با زاویه آزیموت و بردار ترجمه عمودی به طور جداگانه برآورد شده است. بردار ترجمه افقی و زاویه آزیموت با ثبت تصاویر مشخصه پیش بینی شده ارتو تولید شده توسط نقاط مبدأ و هدف تخمین زده می شود. ترجمه عمودی با اختلاف ارتفاع نقاط مبدا و نقاط هدف در مناطق همپوشانی پس از تراز افقی تخمین زده می شود. ابرهای نقطه ای TLS زوجی شبیه سازی شده و ابرهای نقطه ای اسکن شده توسط RIEGL VZ-400 و Trimble SX10 برای اعتبارسنجی روش پیشنهادی استفاده می شوند. نتایج تجربی نشان میدهد که نتیجه ثبت درشت روش پیشنهادی در سطح سانتیمتر است و تنها دهها ثانیه برای ثبت درشت میلیونها نقطه مورد نیاز است.
به دلیل انسداد، دیدگاههای مختلف و این واقعیت که شدت اسکن لیزری تحت تأثیر عوامل زیادی قرار میگیرد، ثبت تصاویر ویژگی چالش برانگیز است. در برخی موارد، تطبیق ویژگی SIFT ممکن است نتواند مطابقت کافی را از تصاویر ویژگی ابر نقطه مبدا و ابر نقطه هدف پیدا کند. لبه ها و خطوط در مقیاس بزرگ را می توان از تصاویر ویژگی استخراج کرد و کمتر تحت تأثیر انسداد، دیدگاه های مختلف و تغییرات شدت قرار می گیرند. روشهای تطبیق مبتنی بر خط یا لبه را میتوان برای تطبیق تصاویر ویژگی برای بهبود استحکام در آینده به کار برد.

















بدون دیدگاه