

ثبت دو به دو درشت ابرهای نقطه داخلی با استفاده از ویژگیهای خط دوبعدی
چکیده

کلید واژه ها:
ابرهای نقطه داخلی ; ثبت نام ؛ 4DOF ; تطبیق خط
1. مقدمه
2. مواد و روشها
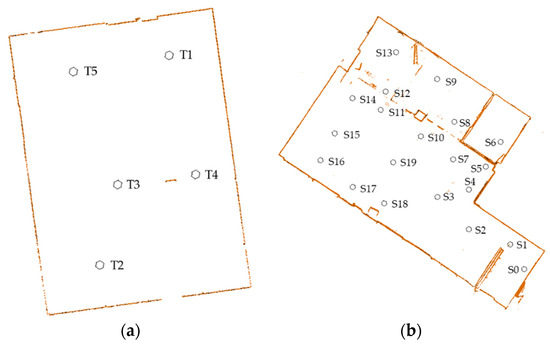
2.1. مجموعه داده های Cloud Point Indoor
2.2. روش ثبت نام
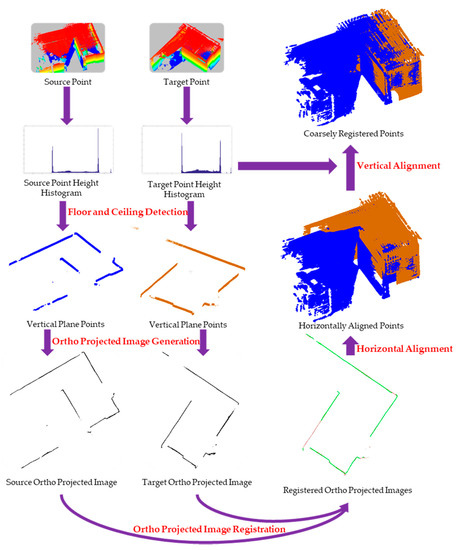
2.2.1. چارچوب ثبت نام
تبدیل صلب بین ابرهای نقطه مبدا و ابرهای نقطه هدف بدون هیچ محدودیتی را می توان به صورت زیر نوشت:
جایی که [ایکسسyسzس]تینقطه مبدا و [ایکستیyتیzتی]تینقطه هدف است [تیایکستیyتیz]تیبردار ترجمه بین نقاط مبدا و نقاط هدف است. α، β،θزوایای چرخش بین نقاط مبدا و نقاط هدف هستند. اگر تجهیزات تراز شده باشد یا شیب با یک سنسور شیب در جمع آوری داده ها جبران شود، سپس αو βبرابر با صفر هستند. در چنین شرایطی می توان معادله (1) را به صورت زیر نوشت:
یا
معادله (3) را می توان به صورت زیر قالب بندی کرد:
یا
2.2.2. تولید تصویر Ortho-Projected
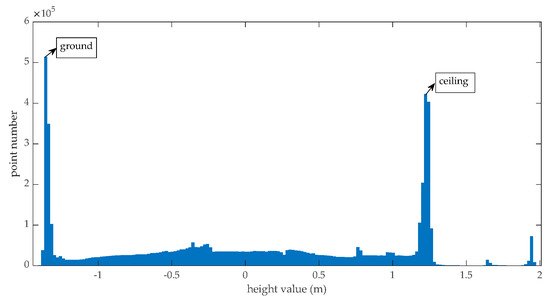
از آنجایی که تجهیزات در بالای کف نصب شده اند و مبدا مختصات سنسور روی تجهیزات است، مقادیر z نقاط کف قطعا کوچکتر از صفر و مقادیر z نقاط سقف قطعا بزرگتر از صفر هستند. ارتفاع نقاط کف را می توان با قرار دادن زیر قسمت صفر هیستوگرام ارتفاع با استفاده از توزیع مقادیر شدید یافت. بر این اساس، ارتفاع نقاط سقف را می توان با برازش بالای قسمت صفر هیستوگرام ارتفاع با استفاده از توزیع مقادیر شدید یافت. تابع چگالی احتمال استفاده شده در این مقاله به صورت معادله (6) تعریف شده است. در معادله (6) μمحل حداکثر مقدار و سیک پارامتر مقیاس است.
قبل از ثبت نام، نقاط مبدا و هدف همگی در سیستم مختصات متعلق به اسکنر هستند. برای تولید تصاویر ارتو پروجکشن شده از ابر نقطه ایستگاه (نقاط منبع یا نقاط هدف)، حداقل ایکسو yمقادیر (به عنوان ایکسمترمنn و yمترمنn) از آن نقطه ابر ایستگاه یافت می شود. برای یک امتیاز (ایکس،y،z)شماره سطر و شماره ستون آن در تصویر عمودی با معادلات (7) و (8) به دست می آید. Lرزولوشن شبکه ای تصاویر ارتو پروجکت شده است. از نظر تئوری، هر چه کوچکتر باشد L، دقت تطبیق بهتر است اما پیچیدگی محاسبات بالاتر است. برای سازش بین دقت و پیچیدگی محاسباتی، Lدر این مقاله به صورت تجربی روی 0.01 متر تنظیم شده است. اگر یک پیکسل در یک تصویر ارتو پروجکت شده حاوی حداقل یک نقطه باشد، مقدار پیکسل آن 255 تنظیم می شود. در غیر این صورت، مقدار پیکسل روی 0 تنظیم می شود. به این ترتیب، می توانیم یک تصویر عمودی باینری برای منبع به دست آوریم. نقاط و نقاط هدف
2.2.3. ثبت تصاویر ارتو پروجکت شده
نقاط (ایکس،y)و (ایکس،Y)در مبدأ میتوان تصاویر ارتو پروجکتشده و تصاویر هدف را در مختصات دکارتی در مختصات همگن نوشت. [ایکس y 1]تیو [ایکس Y 1]تی، به ترتیب، در کجا تینشان دهنده جابجایی است. رابطه بین نقطه تصویر ارتو پروجکت شده منبع [ایکس y 1]تی و نقطه تصویر ارتو پروجکت شده را هدف قرار دهید [ایکس Y 1]تیرا می توان به صورت زیر نوشت:
یا
اگر آایکس+بy+1=0یک خط در تصویر ارتو پروژکتوری منبع در مختصات دکارتی است، همان خط در مختصات همگن را می توان به صورت زیر نوشت:
یا
جایی که لتی=[آب1]پارامتر یک خط در یک تصویر ارتو پروجکت شده منبع است. به طور مشابه، خط آایکس+بy+1=0در یک تصویر عمودی هدف در مختصات دکارتی می توان به صورت زیر نوشت:
یا
جایی که Lتی=[آب1]پارامتر یک خط در یک تصویر ortho-projected هدف است. ضرب دو طرف معادله (10) در سمت چپ Lتی، ما بدست می آوریم:
از رابطه (14) می دانیم که سمت چپ معادله (15) 0 است. بنابراین، سمت راست معادله (15) 0 است، به این معنی:
با ترکیب معادلات (12) و (16) می توان نتیجه گرفت که:
جایی که λیک پارامتر مقیاس است.
معادله (17) رابطه بین پارامترهای خط در تصاویر ارتو پروجکت شده مبدا و هدف و تبدیل بین این دو تصویر ارتو پروجکت شده را ایجاد می کند. معادله (17) را می توان به صورت تفصیلی به صورت زیر نوشت:
با جایگزینی معادله (20) به معادلات (18) و (19)، دو معادله (معادلات (21) و (22)) مربوط به پارامترهای ثبت نامعلوم بدست می آوریم. (θ،تیایکس،تیy)به پارامترهای خطوط متناظر در تصاویر ارتو پروجکت شده منبع و هدف.
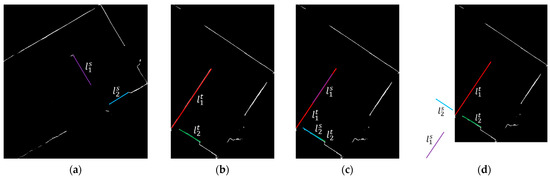
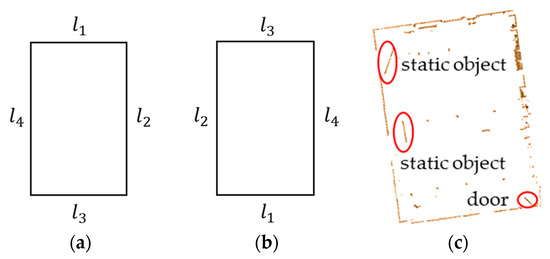
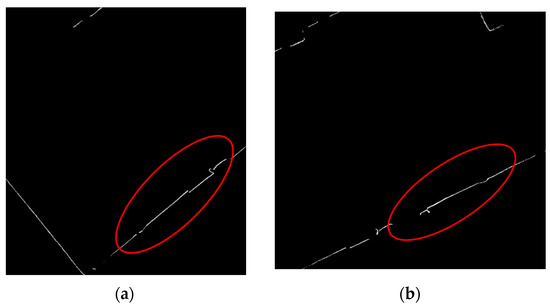
نکته ای که باید به آن توجه شود این است که اگر فقط از یک جفت خط استفاده شود، دو راه حل برای معادلات (21) و (22) وجود دارد. همانطور که در شکل 4 نشان داده شده است ، یک جفت خط در یک تصویر مبدا ارتو پروجکت شده ( ل1سو ل2سدر شکل 4 الف) را می توان با خطوط متناظر آن در تصویر ارتو پروجکت شده هدف مطابقت داد ( ل1تیو ل2تیدر شکل 4 ب) از طریق محلول 1 ( شکل 4 ج) و 2 ( شکل 4 د). ترجمه ها تیایکسو تیyاز دو راه حل یکسان است. زاویه چرخش محلول 1 (به صورت θ1) و راه حل 2 (با علامت گذاری شده است θ2) را می توان با رابطه (23) مرتبط کرد. اگر یک جواب به دست آوریم، می توانیم با استفاده از رابطه (23) راه حل دیگری به دست آوریم. سپس، این دو راه حل با استفاده از:
مانند الگوریتم RANSAC، این مقاله یک جفت خط را از منبع و هدف تصاویر ارتو پروژکتیو به صورت تکراری انتخاب میکند و سپس پارامترهای ثبت نامعلوم با استفاده از الگوریتم حداقل مربعات مطابق معادلات (21) و (22) برآورد میشوند. در نهایت، پارامترهای ثبت تخمین زده شده توسط یک تابع کیفیت تطبیق خاص ارزیابی می شوند س(اس،تی)، جایی که اسنشان دهنده منبع تصویر ortho-projected و تیتصویر ortho-projected هدف را نشان می دهد. س(اس،تی)بر اساس فاصله بین پیکسل های تبدیل شده در تصویر ارتو پروجکت شده مبدا و نزدیکترین همسایه آن در تصویر عمودی هدف قرار می گیرد. در مرحله ارزیابی، پیکسلهای موجود در تصویر مبدا ارتو پروجکت شده با استفاده از پارامترهای ثبت تخمینی به تصویر ارتو پروجکتشده هدف تبدیل میشوند. برای هر پیکسل پس از تبدیل، نزدیکترین پیکسل آن در تصویر هدف قرار داده شده پیدا می شود و کیفیت تطبیق آن به صورت زیر تعریف می شود:
2.2.4. ثبت نام در ابر نقطه
پس از به دست آوردن پارامترهای تراز افقی تیایکس، تیy،و θ، یک نقطه منبع [ایکسسyسzس]تیابتدا توسط:
سپس، افست عمودی بین نقاط منبع تراز افقی و نقاط هدف با ارتفاع کف نقاط منبع به دست میآید. ساعتfسارتفاع سقف نقاط مبدا ( ساعتجسارتفاع کف نقاط هدف ( ساعتfتیو ارتفاع سقف نقاط هدف ( ساعتجتی) توسط:
در نهایت امتیاز ثبت شده [ایکستیyتیzتی]تیبه دست می آید:
3. نتایج
3.1. توضیحات متریک ارزیابی
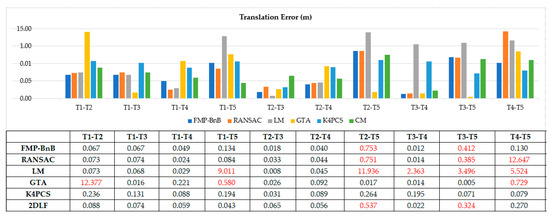
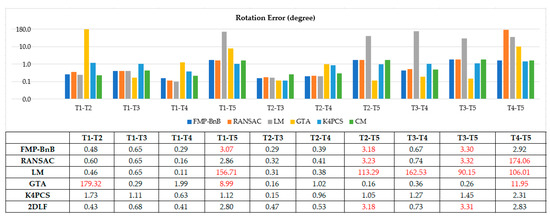
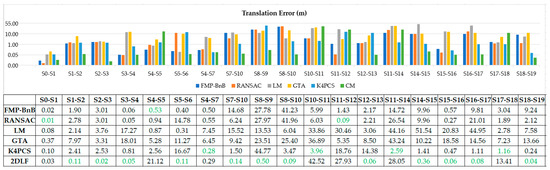
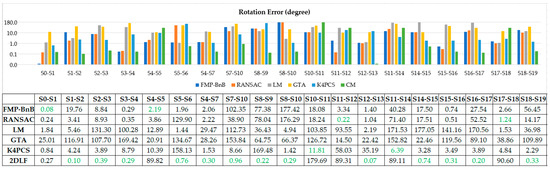
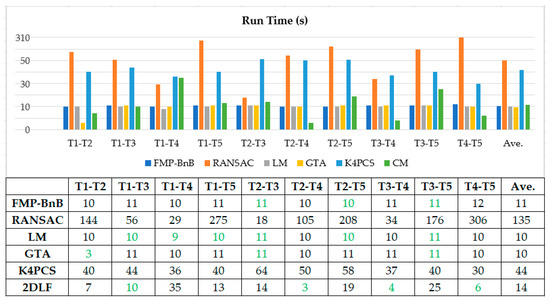
مانند بسیاری از کارهای قبلی [ 43 ، 45 ، 48 ]، خطای چرخش هآر، خطای ترجمه هتی، نرخ ثبت موفقیت آمیز (SRR) و زمان اجرا برای ارزیابی الگوریتم پیشنهادی استفاده می شود. خطای چرخش هآرو خطای ترجمه هتیبه این صورت تعریف می شوند:
جایی که آر¯و تی¯نشان دهنده حقیقت پایه چرخش و ترجمه، آرو تینشان دهنده چرخش و ترجمه تخمین زده شده توسط الگوریتم ثبت است، tr(.)نشان دهنده رد ماتریس و هآرزاویه چرخش در نمایش محور – زاویه است.
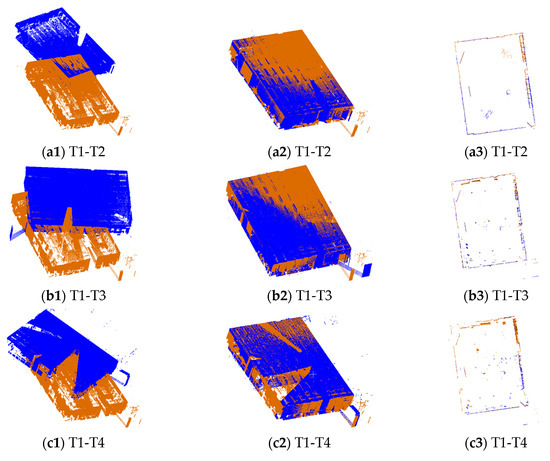
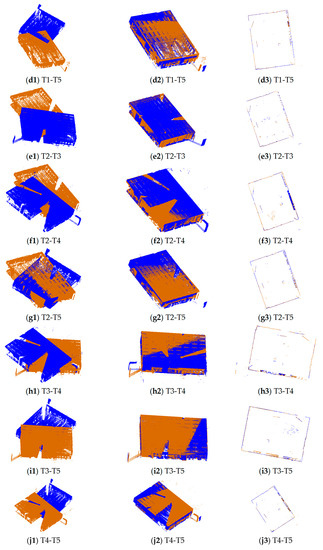
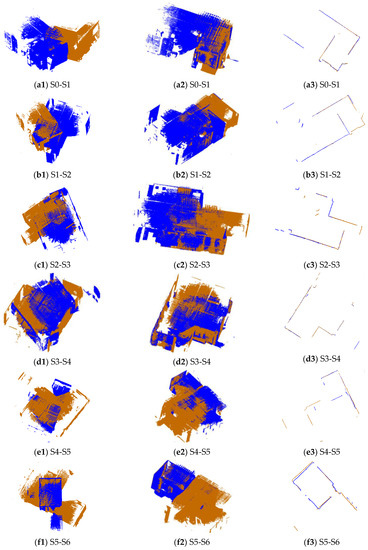
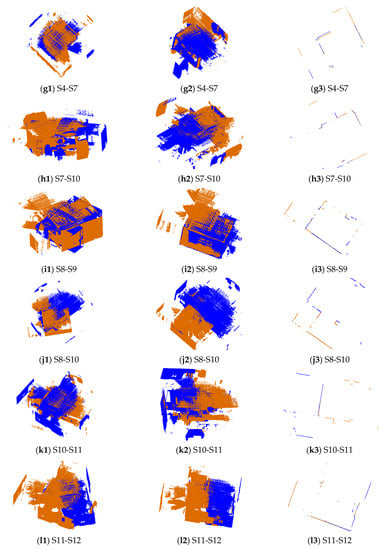
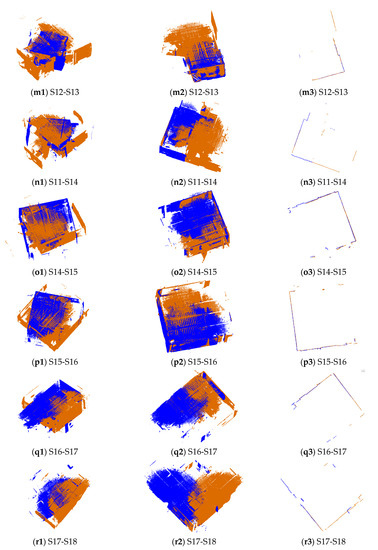
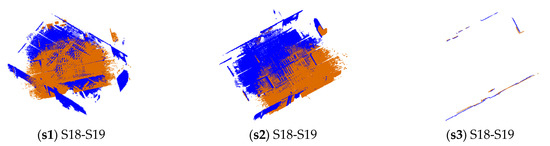
3.2. ارزیابی های کیفی
3.3. ارزیابی های کمی
4. بحث
4.1. دقت و کارایی زمان
4.2. محدودیت ها
5. نتیجه گیری ها
منابع
- ایمان ذوالانواری، س.م. Laefer، روش برش DF برای نمای منحنی و استخراج پنجره از ابرهای نقطه ای. ISPRS J. Photogramm. 2016 ، 119 ، 334-346. [ Google Scholar ] [ CrossRef ]
- لیانگ، ایکس. کانکاره، وی. Hyyppä، J.; وانگ، ی. کوکو، ا. هاگرن، اچ. یو، ایکس. کارتینن، اچ. جااکولا، ا. گوان، اف. و همکاران اسکن لیزری زمینی در فهرست جنگل ها ISPRS J. Photogramm. 2016 . [ Google Scholar ] [ CrossRef ]
- لاگ، دی. برودو، ن. Leroux, J. مقایسه دقیق سه بعدی توپوگرافی پیچیده با اسکنر لیزری زمینی: کاربرد در دره Rangitikei (NZ). ISPRS J. Photogramm. 2013 ، 82 ، 10-26. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- محمود، ب. Han, S. ثبت سه بعدی ابرهای نقطه داخلی برای واقعیت افزوده . انجمن مهندسی عمران آمریکا: Reston، VA، ایالات متحده آمریکا، 2019؛ صص 1-8. [ Google Scholar ]
- محمود، ب. هان، اس. لی، دی. ثبت و بومی سازی ابرهای نقطه سه بعدی صحنه های داخلی با استفاده از ویژگی های هندسی برای واقعیت افزوده مبتنی بر BIM. Remote Sens. 2020 , 12 , 2302. [ Google Scholar ] [ CrossRef ]
- بوئنو، ام. گونزالس-خورخه، اچ. مارتینز-سانچز، جی. Lorenzo, H. ثبت نام درشت ابر نقطه خودکار با استفاده از توصیفگرهای هندسی نقطه کلیدی برای صحنه های داخلی. خودکار. ساخت و ساز 2017 ، 81 ، 134-148. [ Google Scholar ] [ CrossRef ]
- لی، اف. زلاتانوا، اس. کوپمن، ام. بای، ایکس. Diakité، A. برنامه ریزی مسیر جهانی برای یک پهپاد داخلی. خودکار. ساخت و ساز 2018 ، 95 ، 275-283. [ Google Scholar ] [ CrossRef ]
- اوچمن، اس. ووک، آر. وسل، آر. Klein, R. بازسازی خودکار مدل های ساختمانی پارامتریک از ابرهای نقطه داخلی. محاسبه کنید. نمودار 2016 ، 54 ، 94-103. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شی، دبلیو. احمد، دبلیو. لی، ن. فن، دبلیو. شیانگ، اچ. وانگ، ام. مدلسازی هندسی معنایی ابر نقطهای داخلی بدون ساختار. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 9. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ناویس. قدرت ساختمان های دیجیتال را آزاد کنید. در دسترس آنلاین: https://www.navvis.com/ (در 17 سپتامبر 2020 قابل دسترسی است).
- معرفی دوربین Intel RealSense LiDAR L515. در دسترس آنلاین: https://www.intel.com/content/www/us/en/architecture-and-technology/realsense-overview.html (در 17 سپتامبر 2020 قابل دسترسی است).
- کینکت برای ویندوز. در دسترس آنلاین: https://developer.microsoft.com/en-us/windows/kinect/ (در 17 سپتامبر 2020 قابل دسترسی است).
- بسل، پی جی؛ McKay, ND روشی برای ثبت اشکال سه بعدی. IEEE Trans. الگوی مقعدی 1992 ، 14 ، 239-256. [ Google Scholar ] [ CrossRef ]
- روسینکیویچ، اس. لووی، ام. انواع کارآمد الگوریتم ICP. در مجموعه مقالات سومین کنفرانس بین المللی در مورد تصویربرداری و مدل سازی دیجیتال سه بعدی، شهر کبک، QC، کانادا، 28 مه تا 1 ژوئن 2001. صص 145-152. [ Google Scholar ]
- هان، جی. یین، پی. سلام.؛ Gu، F. ICP پیشرفته برای ثبت مدل های محیطی سه بعدی در مقیاس بزرگ: یک مطالعه تجربی. Sensors 2016 , 16 , 228. [ Google Scholar ] [ CrossRef ]
- بیبر، پ. Stra Ss Er, W. تبدیل توزیع های نرمال: رویکردی جدید برای تطبیق اسکن لیزری. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2003 در مورد ربات ها و سیستم های هوشمند (IROS 2003) (شماره گربه 03CH37453)، لاس وگاس، NV، ایالات متحده، 27-31 اکتبر 2003. صص 2743-2748. [ Google Scholar ]
- تاکوچی، ای. Tsubouchi، T. تطبیق اسکن سه بعدی با استفاده از تبدیل توزیع های نرمال سه بعدی بهبودیافته برای نقشه برداری رباتیک متحرک. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2006 در مورد ربات ها و سیستم های هوشمند، پکن، چین، 9 تا 15 اکتبر 2006. صص 3068–3073. [ Google Scholar ]
- Magnusson، M. تبدیل توزیع های عادی سه بعدی: یک نمایش کارآمد برای ثبت، تجزیه و تحلیل سطح، و تشخیص حلقه. Ph.D. پایان نامه، دانشگاه Örebro، Örebro، سوئد، 2009. [ Google Scholar ]
- جانسون، AE; هبرت، ام. استفاده از تصاویر چرخشی برای تشخیص کارآمد شی در صحنههای سه بعدی درهم. IEEE Trans. الگوی مقعدی 1999 ، 21 ، 433-449. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ماکادیا، ع. پترسون، ا. Daniilidis، K. ثبت تمام خودکار ابرهای نقطه سه بعدی. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2006 در مورد دید رایانه و تشخیص الگو (CVPR’06)، نیویورک، نیویورک، ایالات متحده آمریکا، 17 تا 22 ژوئن 2006. ص 1297–1304. [ Google Scholar ]
- Rusu، RB; بلودو، ن. مارتون، ZC; Beetz، M. تراز کردن نماهای ابر نقطه با استفاده از هیستوگرام ویژگی های پایدار. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ در مورد ربات ها و سیستم های هوشمند، نیس، فرانسه، 22 تا 26 سپتامبر 2008. صص 3384-3391. [ Google Scholar ]
- Rusu، RB; بلودو، ن. Beetz، M. هیستوگرام های ویژگی نقطه سریع (FPFH) برای ثبت سه بعدی. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد رباتیک و اتوماسیون، کوبه، ژاپن، 12-17 مه 2009. صص 3212–3217. [ Google Scholar ]
- دونگ، ز. یانگ، بی. لیو، ی. لیانگ، اف. لی، بی. Zang, Y. زمینه شکل باینری جدید برای توصیف سطح محلی سه بعدی. ISPRS J. Photogramm. 2017 ، 130 ، 431-452. [ Google Scholar ] [ CrossRef ]
- یانگ، بی. Zang, Y. ثبت خودکار ابرهای نقطه اسکن لیزری زمینی متراکم با استفاده از منحنی ها. ISPRS J. Photogramm. 2014 ، 95 ، 109-121. [ Google Scholar ] [ CrossRef ]
- دلد، سی. Brenner, C. ثبت داده های اسکن لیزری زمینی با استفاده از تکه های مسطح و داده های تصویر. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. Sci.-ISPRS Arch. 2006 ، 36 ، 78-83. [ Google Scholar ]
- کلبه، دی. ون آرت، جی. رومانچیک، پی. ون لیوون، م. Cawse-Nicholson، K. ثبت جفت دادههای اسکنر لیزری زمینی جنگلی با معیارهای اطمینان جاسازی شده بدون نشانگر. IEEE Trans. Geosci. Remote 2016 , 54 , 4314–4330. [ Google Scholar ] [ CrossRef ]
- زنگ، ا. آهنگ ها.؛ نیسنر، ام. فیشر، ام. شیائو، جی. Funkhouser, T. 3dmatch: یادگیری توصیفگرهای هندسی محلی از بازسازیهای rgb-d. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو (CVPR)، Hulunono، HI، ایالات متحده آمریکا، 21-26 ژوئیه 2017؛ صفحات 1802-1811. [ Google Scholar ]
- ژانگ، ز. سان، ال. ژونگ، آر. چن، دی. خو، ز. وانگ، سی. کوین، سی. سان، اچ. Li, R. ساخت ویژگی عمیق سه بعدی برای ثبت نقاط ابری اسکن لیزری موبایل. IEEE Geosci. سنسور از راه دور Lett. 2019 ، 16 ، 1904-1908. [ Google Scholar ] [ CrossRef ]
- پوژول-میرو، ا. Casas, JR; رویز-هیدالگو، جی. تطبیق مکاتبات در ابرهای نقطه سه بعدی سازماندهی نشده با استفاده از شبکه های عصبی کانولوشن. کامپیوتر بینایی تصویر 2019 ، 83 ، 51-60. [ Google Scholar ] [ CrossRef ]
- Qi، CR; سو، اچ. مو، ک. Guibas، LJ PointNet: یادگیری عمیق در مجموعه های نقطه برای طبقه بندی و تقسیم بندی سه بعدی. arXiv 2017 ، arXiv:1612.00593v2. [ Google Scholar ]
- دنگ، اچ. بردال، تی. Ilic، S. PPFNet: ویژگی های محلی آگاه از زمینه جهانی برای تطبیق نقاط سه بعدی قوی. در مجموعه مقالات کنفرانس IEEE/CVF 2018 در مورد دید رایانه و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018؛ صص 195-205. [ Google Scholar ]
- آئوکی، ی. گوفورث، اچ. Srivatsan، RA; Lucey, S. PointNetLK: ثبت ابر نقطه ای قوی و کارآمد با استفاده از PointNet. در مجموعه مقالات کنفرانس IEEE/CVF در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019؛ صص 7163–7172. [ Google Scholar ]
- ملادو، ن. آیگر، دی. Mitra, NJ SUPER 4PCS سریع ثبت جهانی نقطه ابری از طریق نمایه سازی هوشمند. محاسبه کنید. نمودار انجمن 2014 ، 33 ، 205-215. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Theiler، PW; Wegner، JD; شیندلر، کی. مجموعههای متجانس 4 نقطهای مبتنی بر نقطه کلید – ثبت خودکار اسکنهای لیزری بدون نشانگر. ISPRS J. Photogramm. 2014 ، 96 ، 149-163. [ Google Scholar ] [ CrossRef ]
- Ge, X. ثبت خودکار بدون نشانگر ابرهای نقطه با مجموعههای 4 نقطهای متجانس مبتنی بر نقطه کلید معنایی. ISPRS J. Photogramm. 2017 ، 130 ، 344-357. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Järemo Lawin، F. دانلجان، م. شهباز خان، ف. فورسن، پ. Felsberg, M. ثبت مجموعه نقطه تطبیقی چگالی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ صص 3829–3837. [ Google Scholar ]
- تسین، ی. کاناد، تی. یک رویکرد مبتنی بر همبستگی برای ثبت مجموعه نقطه قوی . Springer: برلین/هایدلبرگ، آلمان، 2004; صص 558-569. [ Google Scholar ]
- ژیان، بی. ثبت مجموعه نقطه قوی Vemuri، BC با استفاده از مدل های مخلوط گاوسی. IEEE Trans. الگوی مقعدی 2010 ، 33 ، 1633-1645. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- مایروننکو، آ. آهنگ، X. ثبت مجموعه نقطه: رانش نقطه منسجم. IEEE Trans. الگوی مقعدی 2010 ، 32 ، 2262-2275. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- تسای، سی. هوانگ، سی. چی-یی، تی. Chih-Hung، H. الگوریتم ثبت ابر نقطه صحنه داخلی بر اساس کالیبراسیون دوربین RGB-D. Sensors 2017 ، 17 ، 1874. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سانچز، جی. دنیس، اف. چچین، پ. دوپون، اف. Trassoudaine, L. ثبت جهانی ابرهای نقطه سه بعدی LiDAR بر اساس ویژگیهای صحنه: کاربرد در محیطهای ساختاریافته. Remote Sens. 2017 , 9 , 1014. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Pavan، NL; دوس سانتوس، DR; Khoshelham, K. ثبت جهانی ابرهای نقطه ای اسکنر لیزری زمینی با استفاده از مکاتبات هواپیما به هواپیما. Remote Sens. 2020 , 12 , 1127. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کای، ز. چین، تی. بوستوس، AP; شیندلر، ک. ثبت بهینه عملی جفتهای اسکن LiDAR زمینی. ISPRS J. Photogramm. 2019 ، 147 ، 118-131. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیو، اچ. ژانگ، ایکس. خو، ی. Chen, X. ثبت درشت کارآمد ابرهای نقطه ای TLS دوتایی با استفاده از تصاویر ویژگی پیش بینی شده ارتو. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 255. [ Google Scholar ] [ CrossRef ]
- Ge، X. هو، اچ. ثبت افزایشی مبتنی بر شی ابرهای نقطه زمینی در یک محیط شهری. ISPRS J. Photogramm. 2020 ، 161 ، 218-232. [ Google Scholar ] [ CrossRef ]
- ژانگ، تی. Suen, CY یک الگوریتم موازی سریع برای نازک کردن الگوهای دیجیتال. اشتراک. ACM 1984 ، 27 ، 236-239. [ Google Scholar ] [ CrossRef ]
- ماتاسیکس، جی. کیتلری، تبدیل Hough احتمالی پیشرونده CGJ. در مجموعه مقالات کنفرانس بینایی ماشین بریتانیا، ساوتهمپتون، انگلستان، 14 تا 17 سپتامبر 1998. صفحات 26.1-26.10. [ Google Scholar ]
- دونگ، ز. لیانگ، اف. یانگ، بی. خو، ی. زنگ، ی. لی، جی. وانگ، ی. دای، دبلیو. فن، اچ. Hyyppä، J.; و همکاران ثبت ابرهای نقطه اسکنر لیزری زمینی در مقیاس بزرگ: بررسی و معیار ISPRS J. Photogramm. 2020 ، 163 ، 327-342. [ Google Scholar ] [ CrossRef ]
- فیشلر، MA; بولس، اجماع نمونه تصادفی RC: الگویی برای تطبیق مدل با کاربردهای آنالیز تصویر و کارتوگرافی خودکار. اشتراک. ACM 1981 ، 24 ، 381-395. [ Google Scholar ] [ CrossRef ]
- ژو، Q. پارک، جی. کلتون، V. ثبت جهانی سریع ؛ Springer: برلین/هایدلبرگ، آلمان، 2016; صص 766-782. [ Google Scholar ]
- آلبارلی، آ. رودولا، ای. Torsello, A. یک رویکرد نظری بازی برای ثبت سطح خوب بدون تخمین حرکت اولیه. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2010 در مورد دید رایانه و تشخیص الگو، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 13 تا 18 ژوئن 2010. صص 430-437. [ Google Scholar ]



بدون دیدگاه