

آمازوناس منطقه ای کوهستانی در پرو با پوشش ابری زیاد است، بنابراین استفاده از داده های نوری در تجزیه و تحلیل تغییرات سطح آب (مانند دریاچه های بورلان و پوماکوچاس در پرو) دشوار است، از سوی دیگر، تصاویر SAR برای استخراج بدنه های آبی و ترسیم خطوط. بنابراین، در این تحقیق برای تعیین تغییرات سطح دریاچه های بورلان و پوماکوچاس، از محصولات Sentinel-1 A/B برای تحلیل دینامیک از سال 2014 تا 2020 استفاده کردیم، علاوه بر ارزیابی رویه، پرواز فتوگرامتری انجام دادیم و اشکال را با هم مقایسه کردیم. و ویژگی های هندسی از هر دریاچه. برای این کار، در موتور Google Earth (GEE)، ما 517 تصویر SAR را برای هر دریاچه با استفاده از الگوریتمهای زیر پردازش کردیم: درخت طبقهبندی و رگرسیون (CART)، جنگل تصادفی (RF) و ماشین بردار پشتیبانی (SVM). ) 2021-02-10، سپس؛ همین مقدار با مقایسه مقادیر مساحت و محیط بهدستآمده از یک پرواز فتوگرامتری و طبقهبندی یک تصویر SAR در همان تاریخ تأیید شد. در ماه های اول سال، افزایش جزئی در مساحت و محیط هر دریاچه تحت تأثیر افزایش بارندگی در منطقه مشاهده شد. CART و Random Forest نتایج بهتری برای طبقه بندی تصویر به دست آوردند و برای تحلیل رگرسیون، رگرسیون بردار پشتیبان (SVR) و رگرسیون جنگل تصادفی (RFR) برازش بهتری با داده ها داشتند (R بالاتر تحت تاثیر افزایش بارندگی در منطقه. CART و Random Forest نتایج بهتری برای طبقه بندی تصویر به دست آوردند و برای تحلیل رگرسیون، رگرسیون بردار پشتیبان (SVR) و رگرسیون جنگل تصادفی (RFR) برازش بهتری با داده ها داشتند (R بالاتر تحت تاثیر افزایش بارندگی در منطقه. CART و Random Forest نتایج بهتری برای طبقه بندی تصویر به دست آوردند و برای تحلیل رگرسیون، رگرسیون بردار پشتیبان (SVR) و رگرسیون جنگل تصادفی (RFR) برازش بهتری با داده ها داشتند (R بالاتر2 )، به ترتیب برای دریاچه های Burlan و Pomacochas. شکل دریاچه ها به دست آمده از طبقه بندی شبیه به پرواز فتوگرامتری بود. برای 10-02-2021، برای دریاچه بورلان، هر 3 طبقه بندی کننده دارای مقادیر مساحت بین 42.48 و 43.53، RFR 44.47 و RPAS 45.63 هکتار بودند. برای دریاچه پوماکوها، 3 طبقهبندی کننده دارای مساحتی بین 414.23 و 434.89، SVR 411.89 و RPAS 429.09 هکتار بودند. در نهایت، ما به دنبال ارائه یک روش سریع برای طبقه بندی تصاویر SAR به دو دسته و در نتیجه به دست آوردن شکل بدنه های آبی و تجزیه و تحلیل تغییرات آنها در دوره های کوتاه هستیم. یک طرح روششناختی نیز برای انجام تحلیل رگرسیون در GC با استفاده از پنج روش ارائه شده است که میتوانند در حوزههای موضوعی مختلف تکرار شوند.
کلید واژه ها:
تغییرات ؛ موتور گوگل ارث ؛ نگهبان ; جنگل تصادفی ; SVM ; سبد خرید ; مشارکتی ؛ منطقه آمازوناس
1. مقدمه
تنها 2.5 درصد از آب سیاره شیرین است که تنها 1.2 درصد آن را آب های سطحی تشکیل می دهد، و بیشتر آن در یخچال ها و 20.9 درصد در دریاچه ها یافت می شود [ 1 ]. بیش از 1.43 میلیون دریاچه و مخزن وجود دارد [ 2 ، 3 ]. این نوع از اکوسیستم های ساحلی و قاره ای، علاوه بر ارائه خدمات مختلف اکوسیستم، منبعی از منابع تغذیه ای برای حیوانات و انسان ها هستند [ 4 ].
منابع آب سطحی همچنین نقش مهمی در توسعه اقتصادی، تعادل اکوسیستم های خشکی و آبی، کشاورزی و محیط زیست دارند [ 5 ]. بنابراین، نظارت بر پویایی منطقه و ذخیره آب یک دریاچه برای ارزیابی اثرات تغییرات آب و هوا و پیشبینی سناریوهای آینده بسیار مهم است [ 6 ]. علاوه بر این، نظارت بر گسترش آب های سطحی از مدیریت منابع آب و مدل سازی آب و هوا، در میان سایر عملکردها، پشتیبانی می کند [ 7 ].
شناسایی توده های آبی در نزدیکی مراکز شهری نیز برای تعیین حدود مناطق سیلابی و در نتیجه تجمع آب، که به منابع احتمالی شیوع بیماری های منتقله از آب تبدیل می شوند، ضروری است [ 8 ].
در سالهای اخیر، با افزایش دسترسی به دادههای رادار دهانه مصنوعی آزاد (SAR)، تحقیقات بر روی منابع آب افزایش یافته است، به عنوان مثال، برای نظارت بر سطوح پرآب دریاچهها در فصول مرطوب و خشک، بهویژه دریاچههای کوچک [ 9 ]. نظارت بر کیفیت آب های سطحی [ 10 ]، نقشه برداری رطوبت [ 11 ]، نقشه برداری رودخانه [ 12 ]، و تجزیه و تحلیل تغییرات مکانی و زمانی در سطح آب دریاچه ها [ 13 ].
در جیانگشی (چین)، تغییرات در سطح سطح آب دریاچه پویان طی سالهای 2014-2016 با استفاده از 33 تصویر SAR از Sentinel-1 مورد تجزیه و تحلیل قرار گرفت و در پلتفرم کاربردی Sentinel (SNAP) [ 14 ] پردازش شد. به نوبه خود، دریاچه دانگتینگ در چین با استفاده از تصاویر SAR از ماهواره زیست محیطی (Envisat) طی سال های 2002-2009 [ 15 ] نظارت شد. در آمریکای لاتین، تصاویر سطح 1 و 7 RADARSAT، تصاویر ماهواره منابع زمین ژاپن (JERS)-1، و پوشش گیاهی آبزی برای محاسبه مساحت باتلاق های جنوب برزیل ترکیب شدند [ 16 ]. دریاچه های شمال آلاسکا نیز در فصل زمستان 2009 با استفاده از تصاویر ماهواره سنجش از دور اروپایی (ERS)-2 برای تعیین کمیت در دسترس بودن آب در زمستان و تابستان نقشه برداری شدند [ 17 ]].
طبقه بندی تصاویر ماهواره ای از طریق درختان طبقه بندی و رگرسیون (CART)، جنگل های تصادفی (RF) و ماشین های بردار پشتیبان (SVM) به نتایج کارآمد و دقیقی دست یافته است [ 18 ]. فرآیند طبقهبندی تصویر عمدتاً شامل تخصیص پیکسلها به یک کلاس بر اساس امضاهای طیفی، شاخصها، اطلاعات زمینهای و غیره است [ 19 ]. برای این کار، دو روش شناخته شده برای یادگیری مشترک تقویت و بسته بندی هستند [ 20 ]. در تقویت، درختان متوالی به نقاطی که توسط پیشبینیکنندههای قبلی به اشتباه پیشبینی شده بودند، وزن بیشتری میدهند و سپس برای پیشبینی رای وزنی گرفته میشود [ 20 ، 21 ]]. در بسته بندی، درختان متوالی به درختان قبلی وابسته نیستند و هر درخت به طور مستقل با استفاده از نمونه اولیه مجموعه داده ساخته می شود. سپس، رای اکثریت ساده برای پیش بینی انجام می شود [ 20 ، 22 ]. این فرآیندها با راهاندازی موتور Google Earth (GEE) بهینهسازی شدند و امکان پردازش موازی دادههای مکانی در مقیاس جهانی با استفاده از ابر Google را فراهم میکرد [ 23 ، 24 ].
مدلهای آماری سادهسازی واقعیت هستند که به زبان ریاضی بیان میشوند، بنابراین برای دستیابی به چنین سادهسازی فرضیاتی باید در نظر گرفته شود، نمونهای از این تحقیق است که مدل رفتاری دریاچهها را بر اساس تاریخهای مختلف از سال 2014 تا 2020 سادهسازی میکنیم. رگرسیون سعی می کند یک کمیت یا یک مقدار مورد انتظار را پیش بینی کند، برخلاف طبقه بندی که سعی می کند یک دسته یا کلاس را پیش بینی کند [ 25 ]. الگوریتم های رگرسیون اصلی شامل رگرسیون خطی ساده (SLR)، رگرسیون چند جمله ای (PR)، رگرسیون جنگل تصادفی (RFR)، رگرسیون بردار پشتیبان (SVR) و رگرسیون درخت تصمیم (DTR) است که می تواند به سرعت در Google Colaboratory (GC) اجرا شود. ).
ما پویایی سطح آب دو دریاچه در منطقه آمازوناس پرو را تحلیل کردیم. برای این، ( 1) ما 517 تصویر Sentinel-1 را برای دوره 2014-2020، با استفاده از پلت فرم GEE پردازش کردیم، (ii) با مساحت و مقادیر محیطی هر دریاچه، پنج روش رگرسیون اجرا شده در Google Collaboratory را اعمال کردیم، (iii) ما مساحت و محیط را با طبقه بندی یک تصویر SAR از 2021-02-10 محاسبه کردیم و با مقدار پیش بینی شده توسط بهترین رگرسیون مقایسه کردیم و (iv) در نهایت مقادیر محاسبه شده در iii را مقایسه کردیم.با پرواز فتوگرامتری انجام شده در همان تاریخ (10/02/2021). در واقع، این تحقیق با تکیه بر تداوم داده های تصویر SAR از Sentinel-1 به دنبال نشان دادن پویایی سطوح آب دو دریاچه با فاصله تقریباً 50 کیلومتری از هم، با شرایط اقلیمی، جغرافیایی و شرایط اجتماعی-اقتصادی متفاوت بود.
برخلاف سایر مطالعات، ما ماسک آب را با طبقهبندی تصاویر SAR در موتور Google Earth با استفاده از درختان طبقهبندی و رگرسیون، جنگل تصادفی و ماشین بردار پشتیبان محاسبه کردیم و آنها را با یک ارتوموزائیک با وضوح بالا که توسط یک سیستم هواپیمای خلبان از راه دور بدست آمده بود مقایسه کردیم. ما همچنین انعطافپذیری انجام تحلیل رگرسیون را در Google Colaboratory با استفاده از روشهای رگرسیون خطی ساده، رگرسیون چند جملهای، رگرسیون بردار پشتیبان، رگرسیون درختهای تصمیمگیری و رگرسیون جنگل تصادفی نشان میدهیم و روشهای رگرسیون مشابهی را میتوان در حوزههای موضوعی مختلف اعمال کرد.
2. مواد و روشها
2.1. منطقه مطالعه
بورلان و پوماکوچاس دو دریاچه اصلی در منطقه آمازوناس (شمال غربی پرو) هستند. بعد، شکل 1 موقعیت جغرافیایی دریاچه بورلان و پوماکوچاس را به ترتیب در استان های اوتکوبامبا و بونگارا در منطقه آمازوناس، پرو نشان می دهد.
در دریاچه بورلان، آب و هوای گرم با میانگین دمای 24.9 درجه سانتی گراد و ارتفاع 450 متر مربع است [ 26 ]. دریاچه پوماکوچاس در آب و هوای گرم و معتدل قرار دارد و میانگین دمای سالانه آن 15 درجه سانتی گراد و ارتفاع 2220 متری زمین است [ 27 ].
هر دو دریاچه از نظر گردشگری، ماهیگیری و خدمات چشم انداز، آب برای فعالیت های کشاورزی، تنظیم منابع آب و تنوع زیستی اهمیت اجتماعی-اقتصادی و زیست محیطی دارند.
2.2. طرح روش شناختی
شکل 2 روش تجزیه و تحلیل دینامیک سطح آب دریاچه های Burlan و Pomacochas را در طول سال های 2014-2020 با استفاده از تصاویر ماموریت Sentinel-1 در GEE و پنج روش رگرسیون خلاصه می کند: SLR، PR، SVR، DTR و RFR. برای این کار، در ابتدا لکههای تصاویر SAR کاهش یافت، برای طبقهبندی بعدی با استفاده از الگوریتمهای CART، RF و SVM، تصاویر طبقهبندیشده در QGIS 3.10 پردازش شدند. متعاقباً در Google Collaboratory از طریق پنج روش رگرسیون و مقادیر مساحت و محیط محاسبه شده در QGis، مساحت و محیط برای سال 10-02-2021 با محاسبه R 2 پیشبینی شد.از هر روش رگرسیون در نهایت، برای تایید محاسبات انجام شده در GEE و GC، مساحت و محیط هر دریاچه در میدان با استفاده از سیستم هواپیمای خلبانی از راه دور (RPAS) برای مقایسه با مساحت و محیط بهدستآمده از استخراج در GEE و تخمین رگرسیون اندازهگیری شد. روش R2 بزرگتر .
2.3. مجموعه داده های SAR و نقاط آموزشی
تصاویر Sentinel-1 A/B (COPERNICUS/S1_GRD) موجود در GEE [ 28 ] با وضوح زمانی 6 روز استفاده شد. داده های مورد استفاده سطح 1 در تشخیص برد زمین (GRD)، فرمت تداخل باند پهن (IW) (حالت پرتو)، با وضوح 10 متر، با استفاده از جهت پرواز صعودی و نزولی، علاوه بر این، صحنه های قطبی متقابل VH و VV بود. [ 29 ].
در طبقه بندی نظارت شده تمامی تصاویر SAR، 23 و 12 نقطه آموزشی به ترتیب برای دریاچه های پوماکوچا و بورلان استفاده شد. نقاط به صورت آب (1) و خشکی (0) دسته بندی شدند، نقاطی که دارای برچسب 1 بودند در مرکز دریاچه توزیع شدند زیرا بررسی قبلی تصاویر منطقه ای است که آب همیشه در آن وجود دارد، از طرف دیگر نقاط با برچسب 0. به لبههای دریاچهها، معمولاً قسمتهای بالاتری که هیچ تطابق آبی وجود ندارد، توزیع شدند. برای جزئیات بیشتر در مورد نکات آموزشی، فایل 09 مخزن وب موجود آنلاین را بررسی کنید: https://github.com/dargofer/SAR_image_classification (در 15 اکتبر 2022 قابل دسترسی است).
2.4. پردازش تصویر SAR
پردازش تصاویر SAR در پلت فرم GEE [ 23 ] انجام شد. برای این کار، کدی توسعه داده شد (بررسی فایل 01 مخزن وب)، که شامل واردات کاهش لکههای تصاویر Sentinel-1، طبقهبندی و صادرات تصاویر SAR بود. علاوه بر این، با توجه به در دسترس بودن داده ها و هدف تحقیق، ماسک های آب در چهار ترکیب تولید شدند. برای این منظور، جهت پرواز و قطبش تصاویر با هم ترکیب شدند. این ترکیبات نزولی-VH (DVH)، صعودی-VH (AVH)، نزولی-VV (DVV) و صعودی-VV (AVV) از سال 2014 تا 2020 بودند.
برای تجزیه و تحلیل صحیح تصاویر SAR، آنها باید از نظر رادیومتری و هندسی تصحیح شوند، علاوه بر این، بسته به هدف مطالعه، لکه های تصاویر کاهش می یابد [ 30 ]. در مورد ما، همانطور که در راهنمای پردازش GEE برای تصاویر Sentinel-1 ذکر شده است، از تصاویر Sentinel-1 موجود در کاتالوگ داده های GEE استفاده می کنیم. (در دسترس به صورت آنلاین: https://developers.google.com/earth-engine/guides/sentinel1 (در 15 ژانویه 2021 قابل دسترسی است)) این تصاویر قبلاً از نظر رادیومتری و هندسی تصحیح شده بودند [ 29 ]، بنابراین ما فقط لکه های تصاویر را کاهش دادیم. با استفاده از ee.Image.focal_median [ 31 ].
متغیری ایجاد شد که شامل مجموعه فیلتر شده و یک نوار با جزئیات هر یک از چهار ترکیب بود. سپس، ما طبقه بندی نظارت شده را با سه الگوریتم یادگیری ماشین [ 32 ]، RF [ 33 ]، CART [ 34 ] و الگوریتم های SVM [ 35 ، 36 ] و 23 و 12 نقطه آموزشی برای Pomacochas و Burlan Lakes انجام دادیم. علاوه بر این، برای ارزیابی دقت طبقهبندی، ماتریس سردرگمی و شاخص کاپا [ 37 ] را محاسبه کردیم. در نهایت، تصاویر طبقهبندیشده در قالب GeoTIFF و سیستم مرجع مختصات EPSG به ترتیب ۳۲۷۱۷ و ۳۲۷۱۸ برای دریاچههای Burlan و Pomacochas صادر شدند.
2.5. محاسبه صفات هندسی
ویژگیهای هندسی در نرمافزار QGIS 3.10 LTR محاسبه شد، جایی که تصاویر طبقهبندیشده با استفاده از ابزار چندضلعی شطرنجی اجرا شده به صورت دستهای بردار شدند. تصاویر طبقه بندی شده با توجه به کدگذاری آنها حل شدند تا از خطاهای محاسباتی جلوگیری شود زیرا در برخی از تصاویر، چند ضلعی های جداگانه با کدگذاری یکسان تولید می شدند. در نهایت مقادیر هندسی مساحت و محیط برای هر گروه از تصاویر اضافه شد.
2.6. تجزیه و تحلیل رگرسیون
با مقادیر بهدستآمده برای مساحت و محیط هر دریاچه و هر ترکیب و طبقهبندی، پنج روش رگرسیون برای برآورد ارزش مساحت یک دریاچه در یک زمان خاص بعدی اعمال شد. رگرسیون خطی ساده، رگرسیون چند جملهای، رگرسیون بردار پشتیبان، رگرسیون درختی تصمیمگیری و رگرسیون جنگل تصادفی در اسکریپتهایی با زبان برنامهنویسی پایتون در Google Colaboratory اجرا شد.
شکل 3 نمودار جریان روش مورد استفاده در پنج روش رگرسیون را نشان می دهد، در ابتدا کتابخانه های پایتون برای ورودی پایگاه داده وارد شدند، در هر 5 روش پایگاه داده به آموزش و ارزیابی تقسیم شد، در نهایت مقیاس بندی ویژگی و اجرای روش رگرسیون انجام شد. فیلمنامه اجرا شد.
متغیرهای وابسته مساحت و محیط (به طور جداگانه) بودند، و به عنوان یک متغیر مستقل، تاریخ دریافت تصویر SAR به یک عدد صحیح ترتیبی تبدیل شد، زیرا در رگرسیونها، زنجیرهها مشکلاتی را در پیشبینی ایجاد میکنند. کتابخانه اصلی مورد استفاده Scikit-learn [ 38 ] بود که شامل تمامی روش های رگرسیون مورد استفاده در این تحقیق است. در ادامه، رویه انجام شده در هر روش رگرسیون شرح داده شده است.
برای رگرسیون خطی ساده، از کتابخانههای Numpy، Pandas، Matplotlib و Scikit-learn استفاده شد. معادله اساسی SLR با وقفه ( b 0 )، شیب ( b1 ) ، متغیر مستقل (X) و عبارت خطای تصادفی ( e i ) (معادله (1)) تعیین شد. از آنجایی که هدف رگرسیون خطی برازش یک خط مستقیم از طریق داده هایی است که Y را بر اساس X پیش بینی می کند، محاسبه b 0 و b 1 معمولاً با روش حداقل مربعات معمولی برآورد می شود (معادله (2)) [ 39 ، 40 ] . تابع رگرسیون خطی به عنوان یک رگرسیون استفاده شد [ 41]، از ماژول مدل های خطی کتابخانه Scikit-learn وارد شده است.
Y i = b 0 + b 1 X i + e i
Σ (y i − ŷ i ) 2
برای ساخت رگرسیون چند جمله ای ما عمدتا از تابع “PolynomialFeatures” [ 42 ] که متعلق به کتابخانه scikit-learn است استفاده کردیم، برای آن از یک معادله رگرسیون خطی ساده استفاده کردیم که با استفاده از تابع فوق الذکر به درجه دوم تبدیل شد. .
برای رگرسیون بردار پشتیبان، داده های وارد شده با استفاده از مقیاس کننده استاندارد [ 43 ] استاندارد شدند. سپس، برای اعمال اصول تئوری Vapnik Chervonenkis [ 44 ]، که در آن حداقل عرض لوله غیر حساس اپسیلون و تابع هسته مورد نیاز است، تابع SVR [ 45 ]، از ماژول Sklearn.svm وارد شد. علاوه بر این، برای تکمیل رگرسیور، از تابع پایه شعاعی گاوسی (RBF) به عنوان یک تابع هسته برای رگرسیون بردار پشتیبانی [ 46 ] و 0.1 به عنوان مقدار اپسیلون استفاده کردیم.
برای ساختن رگرسیون جنگل تصادفی، RandomForestRegressor [ 47 ] را از ماژول Sklearn.ensemble وارد کردیم و تعداد پیشفرض درختان ( n_estimator = 10) و 0 را به عنوان حالت تصادفی ( random_state ) در نظر گرفتیم. در نهایت، برای اعمال رگرسیون درخت تصمیم به داده ها، DecisionTreeRegressor [ 48 ] به عنوان یک رگرسیون از ماژول Sklearn.tree وارد شد و حالت تصادفی بودن مقدار 0 داده شد.
2.7. داده های فیلد و اعتبارسنجی
اعتبار سنجی مساحت و محیط هر دریاچه با استفاده از تصاویر پروازهای فتوگرامتری انجام شده در تاریخ 10/02/2021 با فانتوم 4 RTK در حالت سینماتیک پس پردازش (PPK) و نقاط کنترل زمینی (GCPs) جمعآوریشده با تریمبل انجام شد. R10 GNSS. برای دریاچه پوماکوچاس 2065 تصویر با میانگین فاصله نمونه برداری زمینی 57/4 سانتی متر و برای دریاچه بورلان 729 تصویر با میانگین GSD 01/4 سانتی متر به دست آمد. همه تصاویر در PIX4D Mapper نسخه 4.6.4 با استفاده از 9 GCP برای هر دریاچه پردازش شدند، سپس برای یکنواخت کردن تصاویر، ارتوموزائیک ها با وضوح 50 سانتی متر بر پیکسل صادر شدند.
اندازه گیری خطاهای نقطه اتصال با محاسبه ریشه میانگین مربعات خطا (RMS) انجام شد، زیرا RMS میانگین خطا و واریانس را در نظر می گیرد. بنابراین، برای یک جهت معین (X، Y یا Z) RMS به صورت زیر تعریف می شود:
RMS =Σ همن2ن–––––√RMS=� همن2ن
جایی که، همنهمنخطای هر نقطه برای جهت داده شده است و N تعداد GCPها است.
در نهایت، برای هر دریاچه، یک تصویر SAR از 2021-02-10 طبقه بندی شد و با ارتوموزائیک های به دست آمده توسط RPAS پوشانده شد.
از سوی دیگر، پنج روش رگرسیون برای هر گروه با دادههای مساحت و محیط با توجه به هر طبقهبندیکننده اعمال شد، که از آن ضریب تعیین (R2 ) موجود در Scikit-learn محاسبه شد [ 49 ] تا برازش را نشان دهد. داده. مقادیر R 2 از −∞ تا 1 متغیر است، بهترین امتیاز ممکن 1 است و مقادیر منفی که به مدل اشاره دارد میتواند بدتر باشد. بنابراین، اگر ŷ i مقدار پیشبینیشده نمونه i ، و y i مقدار واقعی متناظر برای مجموع n نمونه باشد، R2 به صورت زیر تعریف میشود:
آر2 ( y،y^) = 1 –∑ni = 1(yمن–y^من)2∑ni = 1(yمن–y–من)2 و y–=1n∑ni = 1yمن، ∑ni = 1(yمن–y^من)2=∑ni = 1ϵ2منآر2 (�،�^)=1–∑من=1�(�من–�^من)2∑من=1�(�من–�–من)2 و �–=1�∑من=1��من، ∑من=1�(�من–�^من)2=∑من=1��من2
3. نتایج
3.1. توزیع و در دسترس بودن داده های SAR
شکل 4 توزیع و در دسترس بودن ماهانه تصاویر SAR مورد استفاده برای تجزیه و تحلیل پویایی دریاچه های بورلان و پوماکوچاس را از 2014 تا 2021 نشان می دهد.
در مجموع 517 تصویر Sentinel-1 برای هر دریاچه مورد مطالعه از 2014/10/06 تا 2021/01/29 تجزیه و تحلیل شد ( جدول 1 ). علاوه بر این، با توجه به طبقه بندی با استفاده از CART، RF و SVM، 3 محصول در هر تصویر به دست آمد که در مجموع 3102 ماسک آب برای هر دو دریاچه تولید کرد.
جدول S1 ویژگیهای تمام تصاویر مورد استفاده برای به دست آوردن ماسکهای آب دریاچههای بورلان و پوماکوچاس را از سال 2014 تا 2021 نشان میدهد. ما با همان صحنه کار کردیم زیرا از محصولات IW (250 کیلومتر برای هر جارو) استفاده کردیم و فاصله بین دریاچه ها تقریباً 50 کیلومتر بود.
3.2. به دست آوردن ویژگی های هندسی
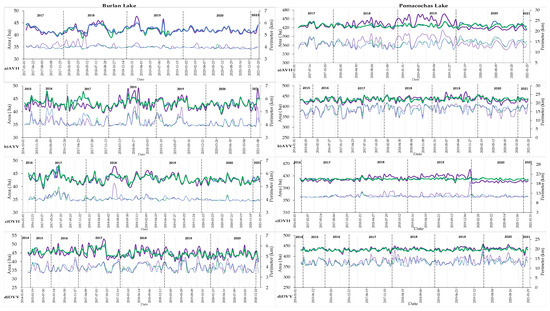
شکل 5 تغییر مساحت و محیط دریاچه بورلان (چپ) و پوماکوچاس (راست) را نشان می دهد. برای دریاچه بورلان، حداکثر مقادیر بر اساس جهت پرواز و قطبش متفاوت است، به عنوان مثال، 2018 و 2019 حداکثر مقادیر را برای VH نشان می دهند، در حالی که برای VV، حداکثر مقادیر در سال های 2016، 2017 و 2018 نشان داده شده است. از طرف دیگر، Pomacochas دریاچه یک روند همگن ارائه می دهد، به عنوان مثال، VH حداکثر مقادیر را در سال 2018 و 2019 ارائه می دهد، در حالی که VV یک روند همگن با حداکثر مقادیر در سال 2019 ارائه می دهد.
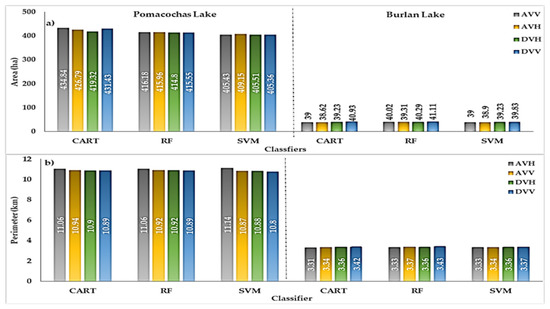
جدول 2 مقادیر حداقل، حداکثر و میانگین به دست آمده برای مساحت (A) و محیط (P) دریاچه های بورلان و پوماکوچاس را نشان می دهد که بر اساس طبقه بندی تصاویر SAR با استفاده از CART، RF و SVM محاسبه شده است. رفتار مقادیر بهدستآمده توسط CART و RF برای هر دو دریاچه مشابه بود، در حالی که مقادیر SVM به دلیل الگوریتم مورد استفاده در طبقهبندی بسیار بالاتر بود.
شکل 6 مقادیر میانگین مساحت (هکتار) و محیط (کیلومتر) دریاچه های پوماکوچاس و بورلان را برای ترکیبات AVH، AVV، DVH، و DVV که از طبقه بندی تصاویر SAR با استفاده از CART، RF و SVM حاصل می شود، مقایسه می کند.
3.3. تجزیه و تحلیل داده ها و پیش بینی
3.3.1. عادی سازی داده ها
برای هر ترکیب، نمودارهایی از مقادیر حروف (Boxenplots) در Google Colaboratory [ 50 ] ایجاد شد زیرا هر دسته از داده ها کمتر از 200 عنصر بود [ 51 ].
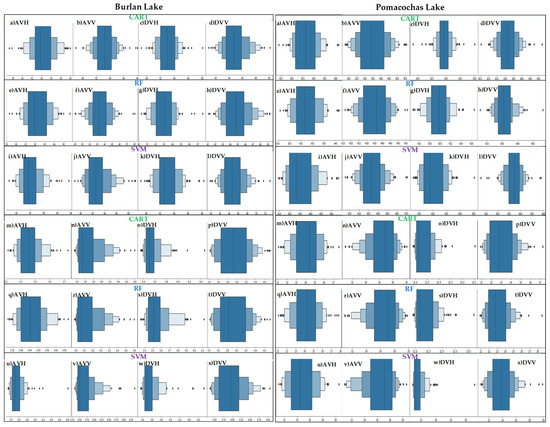
شکل 7 توزیع داده ها را برای هر ترکیب نشان می دهد (AVV، AVH، DVV، و DVH)، که در آن زیرشکل های a-l، m-x هر دریاچه به ترتیب نشان دهنده توزیع داده های منطقه و محیط است.
همانطور که در شکل 7 نشان داده شده است ، مقادیر پرت برای هر مجموعه داده دریاچه وجود دارد. به عنوان مثال، در شکل فرعی (o) DVH دریاچه بورلان، که نشان دهنده توزیع داده های محیطی به دست آمده در گذرگاه نزولی Sentinel-1 و قطبش VH است، اکثر داده ها از 3.4 تا 3.6 کیلومتر گروه بندی شده اند، اما موارد پرت وجود دارد که بیش از 4 کیلومتر (4.2 و 4.4). به نوبه خود، داده های دریاچه پوماکوچاس نیز پراکنده شد، به عنوان مثال، در شکل فرعی (i) AVH، بیشتر داده های منطقه از 420 تا 440 هکتار گروه بندی شدند، اما مقادیری نیز وجود دارد که بیش از 460 هکتار است و همچنین مقادیر کمتر از 415 هکتار است. بنابراین، برای انجام یک تحلیل رگرسیون صحیح بدون گنجاندن مقادیر پرت که میتواند بر مدلهای رگرسیون تأثیر منفی بگذارد، اقدام به حذف آن مقادیر کردیم.
3.3.2. روش های رگرسیون
جدول 3 مقادیر مساحت، محیط و ضرایب تعیین (R 2 ) را نشان می دهد که دارای بالاترین درجه برازش برآورد شده بر اساس SLR، PR، SVR، DTR، و RFR برای 10-02-2021 بودند. جدول S2 از مواد تکمیلی تمام R2 محاسبه شده در تحقیق حاضر را نشان می دهد.
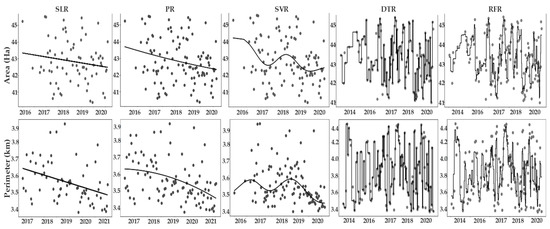
برای تکمیل جدول 3 ، شکل 8 و شکل 9بهترین تناسب مدل را با داده های مساحت و محیط نشان می دهد. برای دریاچه بورلان، SLR، PR، و SVR با داده های منطقه ترکیب DVH طبقه بندی شده توسط SVM مناسب تر بودند، در حالی که DTR و RFR با ترکیب AVV طبقه بندی شده توسط CART مناسب تر بودند. برای محیط، SLR و PR با ترکیب AVH طبقه بندی شده توسط SVM مناسب تر بود و SVR با ترکیب DVH طبقه بندی شده توسط SVM تناسب بهتری داشت. در نهایت، DTR و RFR مناسب تر برای ترکیب DVV طبقه بندی شده توسط CART بودند. برای دریاچه Pomacochas، همه مدلهای رگرسیون با دادههای منطقه ترکیب DVH طبقهبندی شده توسط SVM مناسبتر بودند. برای محیط، SLR برای ترکیب DVV طبقه بندی شده توسط CART، PR به AVV طبقه بندی شده توسط SVM، SVR به AVH طبقه بندی شده توسط RF، و در نهایت، DTR و RFR به DVV طبقه بندی شده توسط CART مناسب تر بود.
برای دریاچه بورلان، با ترکیبات AVV و DVV طبقه بندی شده توسط CART، RFR بهترین R2 را برای منطقه (0.46) و محیط (0.43) به دست آورد. به نوبه خود، برای دریاچه Pomacochas، ترکیب DVH طبقه بندی شده توسط SVM و AVH طبقه بندی شده توسط RF بهترین R2 را برای منطقه (0.41) و محیط (0.42)، به ترتیب، با توجه به SVR به دست آورد.
در مرحله بعد، شکل 10 R 2 هر روش رگرسیون را با هم مقایسه می کند. مشاهده میشود که برای دریاچه بورلان، RFR R2 بالاتری را در دادههای ناحیه و محیط نشان داد، بنابراین انطباق متوسط مدل با دادهها را نشان داد، در حالی که برای دریاچه Pomacochas مدلی که به بهترین وجه با مساحت و محیط مطابقت دارد، مدل رگرسیونی بود. توسط بردارهای پشتیبانی
3.3.3. اعتبار سنجی
شکل 11 چند ضلعی های به دست آمده از طبقه بندی یک تصویر SAR 2021-02-10 را نشان می دهد، با استفاده از CART (سبز)، RF (آبی) و SVM (بنفش) و با ارتوموزائیک دریاچه های Burlan و Pomacochas به دست آمده توسط RPAS در همان تاریخ عبور
خطوط پیوسته از طبقه بندی یک تصویر SAR ترکیبی نزولی در قطبش VV (DVV) به دست آمد، در حالی که خطوط ناپیوسته نتیجه ترکیب نزولی در قطبش VH (DVH) هستند.
ارتوموزائیک میانگین خطای RMS 0.043 متر برای pomacochas و 0.008 متر برای دریاچه Burlan داشت. مساحت (A) و محیط (P) به ترتیب در هکتار و کیلومتر برای هر چند ضلعی استخراج شده از تصویر SAR ترکیبات DVH و DVV محاسبه شد. این مقادیر با برآورد با بهترین روش رگرسیون و پرواز با RPAS انجام شده در دریاچه های Burlan و Pomacochas مقایسه شد. علاوه بر این، درصد تغییرات تصویر SAR و تخمین رگرسیون با توجه به مقادیر به دست آمده توسط RPAS، همانطور که در جدول 4 نشان داده شده است، محاسبه شد .
4. بحث
نظارت بر دریاچه ها با استفاده از تصاویر SAR بسیار متنوع است و می توان از محصولات تجاری SAR [ 6 ، 52 ] یا محصولات دسترسی آزاد مانند نمونه های ماموریت Sentinel-1 [ 28 ] استفاده کرد. در سال 2015، راه اندازی GEE [ 23 ] و ادغام محصولات GRD Sentinel-1 مدیریت و دسترسی به تصاویر SAR را تسهیل کرد. در این مطالعه، ما از 517 تصویر Sentinel-1 A/B برای هر دو دریاچه مورد مطالعه استفاده کردیم، که از سال 2016 داده های بیشتری در دسترس بود، ما دوره 2014-2020 را در نظر گرفتیم، مانند Zijie و همکاران. [ 53]، اما ماسک های آب را با ترکیب قطبش ها و جهت های پرواز ماهواره محاسبه کردیم. این رویکرد به این دلیل پیشنهاد شد که نگاه به گذشته در تصاویر با توجه به پرواز مستقیم یا قطبش در نظر گرفته شده متفاوت است. ما آن را بر اساس جدول 4 و شکل 5 قرار دادیم .
برای کالیبره کردن داده های سطح اول Sentinel-1، چهار جدول جستجو (LUT) وجود دارد. در مورد فایل های سطح 1 در فرمت Sentinel-1 GRD، نوع تصحیح سیگما صفر رایج ترین مورد استفاده برای تولید ضریب پراکندگی ( σ° ) است [ 54 ]. برای انجام تصحیح تصاویر Sentinel-1، فرآیندهایی مانند اعمال فایل های مداری، حذف نویز حرارتی، حذف نویز مرزی، فیلتر لکه ای و اصلاح محدوده داپلر زمین انجام می شود که همگی در اسنپ انجام می شوند. در چین، Zeng و همکاران. [ 14] از این رویکرد پردازش داده برای تحقیقات خود استفاده کردند. ما به نوبه خود از محصولات Sentinel-1 GRD که قبلاً در GEE موجود بود استفاده کردیم. این مجموعه داده تصاویری را ارائه می دهد که در آنها مقادیر پیکسل به طور مستقیم با پراکندگی پس از رادار به صحنه مرتبط است. به این معنا که آنها از نظر رادیومتری کالیبره شدهاند، از جمله حذف نویز حرارتی و اصلاح زمین با استفاده از مدلهای ارتفاعی دیجیتالی (DEMs) ماموریت توپوگرافی رادار شاتل (SRTM) و رادیومتر تابش و انعکاس حرارتی پیشرفته (ASTER). بنابراین، هنگام استفاده از توابع GEE برای همگن کردن تصاویر، ما تصمیم گرفتیم که نویز را با استفاده از کاهش فیلتر حذف کنیم.
راه های مختلفی برای نزدیک شدن به استخراج آب از تصاویر SAR وجود دارد، به عنوان مثال، تقسیم بندی Otsu [ 55 ] و ترسیم از طریق مدل های کانتور فعال [ 56 ]. در این مطالعه، ما از تصاویر SAR طبقه بندی شده توسط سه الگوریتم یادگیری ماشین [ 32 ] برای مقایسه نتایج طبقه بندی و استفاده از تطبیق پذیری و سازگاری GEE برای پردازش تصاویر SAR، علاوه بر اجرای موازی استفاده کردیم. سه الگوریتم CART، RF و SVM.
از آنجایی که مطالعات مشابهی برای دریاچه های مورد مطالعه گزارش نشده است، ما نمی توانیم نتایج طبقه بندی را با هم مقایسه کنیم و فقط پایه های مطالعات بعدی را در چارچوب ششمین هدف توسعه پایدار (هدف 6.6، شاخص 6.6.1) قرار می دهیم که اشاره می کند که تغییراتی در گستره اکوسیستم های مرتبط با آب در طول زمان وجود دارد [ 57 ].
با توجه به موقعیت جغرافیایی دریاچه های مورد مطالعه، هیچ روند مشخصی از نظر تغییرات ماهانه در مساحت و محیط مشاهده نشد، به استثنای ماه ژانویه که بیشترین بارندگی در منطقه است. مقادیر مساحت و محیط بهدستآمده توسط CART و Random Forest مشابه بودند، اما ماشین بردار پشتیبان به دلیل پارامترهای ورودی هر الگوریتم، به عنوان مثال، درختهای تصمیم (CART و Random Forest) و انواع هستهها (SMV) مقادیر متفاوتی را به دست میدهد. ) در طبقه بندی استفاده می شود. چندین مطالعه عملکرد طبقهبندیکنندهها را در کاربردهای مختلف مقایسه میکنند [ 58 ، 59 ، 60 ]، و دقتهای متفاوتی را با تغییر تعداد درختهای تصمیمگیری یا نوع هسته به دست میآورند [ 61 ]]، بنابراین در حال حاضر هیچ پارامتر تعریف شده ای برای طبقه بندی تصاویر وجود ندارد و استفاده و اصلاح پارامترهای ورودی وظیفه هر محققی است. در مورد ما، دقت ها مشابه بود، اما مقادیر مساحت و محیط در برخی موارد متفاوت بود.
در چین، Zijie و همکاران. [ 53 ] از سال 2014 تا 2020 روند صعودی آهسته ای در دریاچه بایانگدیان پیدا کرد و اینکه مساحت دریاچه در بهار و زمستان بیشتر بود. در مورد ما، بارش رفتار مشابهی با مساحت دریاچه بورلان نشان میدهد، در حالی که برای دریاچه پوماکوچاس روند مشخصی در رابطه با بارش وجود ندارد. در واقع، در شکل 12 ، ما بارش (میلی متر/روز) استخراج شده از بارش مادون قرمز گروه مخاطرات آب و هوایی را با داده های ایستگاه (CHIRPS) برای دریاچه های مورد مطالعه نشان می دهیم.
ما در نظر می گیریم که در ارتوموزائیک با وضوح بالا به دست آمده توسط RPAS، کانتور دریاچه ها بهتر از تصویر SAR تعریف شده است، این خطاهای همپوشانی در لبه های دریاچه ها به دلیل وضوح های فضایی مختلف است. والدز-لازالده و همکاران. [ 62 ] از تصاویر با وضوح بالا (Ikonos و QuickBird-2) و با وضوح متوسط (SPOT-4 و Landsat-7 ETM + ) برای تخمین پوشش درختی یک جنگل کاج استفاده کرد. به نوبه خود، هرنان و همکاران. [ 63 ] نتایج بهتری با تصاویر هوایی و ماهواره ای با وضوح فضایی 1 متر و 2.44 متر برای تخمین زیست توده در تاکستان ها یافت. همانطور که در شکل 11 و جدول 4 نشان داده شده استمقدار مساحت و محیط تصاویر با باند VH کمتر بود زیرا امواجی که به صورت عمودی ارسال می شدند و امواجی که به صورت افقی به سنسور برمی گردند کوچک هستند. این بدان معنی است که شدت باند VH کمتر از باند VV بود [ 64 ].
در پرو، به ویژه برای منطقه آمازوناس، هیچ اطلاعات مکانی با وضوح مکانی بالا [ 65 ] وجود ندارد، به همین دلیل است که تحلیل رگرسیون با توجه به متغیرهای دیگر مانند بارش، تبخیر و تعرق، و دما، همان متغیرهایی که بر دینامیک تأثیر میگذارند محدود بود. از یک دریاچه [ 66 ]. برای محاسبه متغیرهای هواشناسی می توان از مدل های تعیین شده استفاده کرد یا کالیبراسیون هایی را انجام داد تا دقت بیشتری در تخمین این متغیرها به دست آید [ 67 ]]. در این تحقیق، ما سعی کردیم فقط منطقه و تاریخ دریافت تصویر SAR را مرتبط کنیم. برای این منظور، تاریخها به اعداد ترتیبی تبدیل شدند و با بهرهگیری از استحکام رگرسیورهای غیرخطی (RFR، SVR، و DTR)، یک همبستگی و دادههای منطقه و محیط پیشبینیشده با میانگین برازش R2 ( 0.4±) به دست آمد. به دست آمده.
از طریق نوع تحلیل رگرسیون مورد استفاده در این تحقیق، بر خلاف محیط دریاچه Pomacochas که بیش از حد تخمین زده شد، مقادیر مساحت و محیط مشابه با مقادیر اعتبار سنجی با RPAS بود، علاوه بر این، شکل چند ضلعی های استخراج شده از SAR. همانطور که در شکل 11 نشان داده شده است، تصاویر طبقه بندی شده با رویکرد ما با شکل هر دریاچه کمی متفاوت است . تغییر در شکل خطوط هر دریاچه به این دلیل رخ می دهد که وضوح فضایی RPAS مورد استفاده بسیار بالاتر (50 سانتی متر بر پیکسل) از Sentinel-1 (تقریباً 10 متر بر پیکسل) است.
استفاده از پلاریزاسیون های منفرد می تواند به شناسایی اجسام آبی کمک کند، اما قطبش های دوگانه عملکرد بهتری دارند [ 68 ، 69 ]. به طور خاص، ما از قطبش های دوگانه استفاده کردیم، به طور خاص داده های به دست آمده از قطبش VV مطابق با SVR برای دریاچه بورلان سازگاری بهتری به دست آورد، در حالی که قطبش VH با توجه به RFR برای دریاچه پوماکوچاس. همانطور که در شکل 10 نشان داده شده است ، حداکثر R2 از روش های رگرسیون از 0.5 تجاوز نمی کند، بنابراین داده های حسگرهای مختلف می توانند برای اصلاح این مورد استفاده شوند [ 70 ].
تولید اطلاعات مکانی از داده های نوری در مناطق پوشش ابری یک چالش است [ 71 ]. علاوه بر این، تجزیه و تحلیل پویایی دریاچهها در آمازونا با استفاده از دادههای همه عواملی که بر یک دریاچه تأثیر میگذارند، به دلیل وضوح زمانی (تاریخهای مختلف کسب)، نبود دادههای آب و هوایی تاریخی، و چگالی کم ایستگاههای هواشناسی، همچنان یک چالش است. مسائلی هستند که باید در تحقیقات آتی حل شوند. لازم به ذکر است که محصولات مختلفی وجود دارد که می توان از تصاویر SAR (شاخص های پوشش گیاهی و تداخل گرا) به دست آورد، اما تحقیقات ما تنها بر ارائه یک روش شناسی سریع برای تجزیه و تحلیل دینامیک دو دریاچه با استفاده از مساحت و محیط و محیط متمرکز بود. ارتباط آنها با تاریخ دریافت تصاویر SAR از نوع GRD.
5. نتیجه گیری ها
پردازش داده های Sentinel-1 در GEE کارآمد، سریع و مناسب برای مطالعات دینامیک دریاچه واقع در مناطق با پوشش ابری بالا است. علاوه بر این، وضوح مکانی و زمانی خوب داده های Sentinel-1 برای تجزیه و تحلیل تغییرات در دوره های کوتاه مناسب است و به نشان دادن پویایی چند زمانی بدنه های آبی کمک می کند. به طور خاص، این تحقیق به نشان دادن تنوع در مساحت و محیط دریاچه های بورلان و پوماکوچاس کمک کرد که در ماه های اول هر سال بیشتر بود.
از سوی دیگر، GC برای اجرای سریع و آسان پنج روش رگرسیون ضروری بود، که نشان میدهد رگرسیون جنگل تصادفی هم به عنوان طبقهبندی و هم به عنوان پیشبینیکننده بهتر عمل میکند. تغییرات -1.18٪ و -7.51٪ با توجه به مساحت و محیط دریاچه Burlan به دست آمده از طریق سیستم هواپیما خلبان از راه دور به دست آمد. از سوی دیگر، برای دریاچه Pomacochas، RFR مساحت دریاچه Pomacochas را 4.01-٪ و مقدار محیط را 76.54٪ بیش از حد تخمین زد.
در نهایت، این تحقیق یک روش کلی برای پردازش دادههای Sentinel-1 برای تجزیه و تحلیل بدنههای آبی با استفاده از درختان طبقهبندی و رگرسیون، جنگلهای تصادفی و ماشینهای بردار پشتیبان مشابه یک طبقهبندی ارائه کرد. علاوه بر این، اسکریپت های قابل تنظیم برای پیش بینی با استفاده از پنج روش رگرسیون در Google Colaboratory ارائه شد.
منابع
- USGS آب زمین کجاست؟ در دسترس آنلاین: https://www.usgs.gov/special-topic/water-science-school/science/where-earths-water?qt-science_center_objects=0#qt-science_center_objects (دسترسی در 10 آوریل 2021).
- مایر، MF; Labou، SG; کرامر، AN; بروسیل، MR; Luff، BT منطقه دریاچه جهانی، آب و هوا، و مجموعه داده جمعیت. علمی دادههای 2020 ، 7 ، 1-12. [ Google Scholar ] [ CrossRef ]
- مسیجر، ام ال. لهنر، بی. گریل، جی. ندوا، آی. Schmitt, O. برآورد حجم و سن آب ذخیره شده در دریاچه های جهانی با استفاده از یک رویکرد زمین آماری. نات. اشتراک. 2016 ، 7 ، 13603. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، ز. شانگ، اس. چی، ال. یان، جی. Lin, G. یک طرح نیمه تحلیلی برای تخمین عمق دیسک Secchi از اندازه گیری های Landsat-8. سنسور از راه دور محیط. 2016 ، 177 ، 101-106. [ Google Scholar ] [ CrossRef ]
- لیو، جی. یانگ، اچ. گاسلینگ، SN; کومو، ام. فلورکه، ام. فایستر، اس. هاناساکی، ن. وادا، ی. ژانگ، ایکس. ژنگ، سی. و همکاران ارزیابی کمبود آب در گذشته، حال و آینده آینده زمین 2017 ، 5 ، 545–559. [ Google Scholar ] [ CrossRef ]
- لی، اس. تان، اچ. لیو، ز. ژو، ز. لیو، ی. ژانگ، دبلیو. لیو، ک. Qin، B. نقشه برداری دریاچه های کوهستانی مرتفع با استفاده از مشاهدات SAR نزدیک به نادر در فضا. Remote Sens. 2018 , 10 , 1418. [ Google Scholar ] [ CrossRef ]
- بیورسیتا، اف. پوسانت، ا. استامف، ا. سری زمانی تصویر Malet، JP Fusion of Sentinel-1 و Sentinel-2 برای نقشه برداری دائمی و موقت آب های سطحی. بین المللی J. Remote Sens. 2019 , 40 , 9026–9049. [ Google Scholar ] [ CrossRef ]
- لیائو، H.-Y. ون، تی.-اچ. استخراج آب های شهری از تصاویر رادار با وضوح بالا: اندازه گیری مورفولوژی سطح شهری برای کنترل اثر پرش دوگانه رادار. بین المللی J. Appl. زمین Obs. Geoinf. 2020 , 85 , 102003. [ Google Scholar ] [ CrossRef ]
- باراسا، بی. Wanyama، J. نظارت بر طغیان دریاچه آب شیرین با استفاده از تصاویر Sentinel-1 SAR در شرق اوگاندا. ان GIS 2020 ، 26 ، 191-200. [ Google Scholar ] [ CrossRef ]
- موسی، ZN; پوپسکو، آی. ماینت، ای. مروری بر کاربردهای داده های ماهواره ای SAR، نوری، ارتفاع سنجی و DEM برای مدل سازی آب های سطحی، نقشه برداری و تخمین پارامتر. هیدرول. سیستم زمین علمی 2015 ، 19 ، 3755-3769. [ Google Scholar ] [ CrossRef ]
- Brisco، B. نقشه برداری و نظارت بر آب های سطحی و تالاب ها با رادار دهانه مصنوعی. سنسور از راه دور Wetl. Appl. Adv. 2015 ، 119-136. موجود به صورت آنلاین: https://www.researchgate.net/profile/B-Brisco/publication/271765042_Remote_Sensing_of_Wetlands_Applications_and_Advances/links/59e4b1e1a6fdcc7154e140-Wetlands-Applications_and_Advances/links/59e4b1e1a6fdcc7154e140-Wetlands-Applications .
- دوان، AM; کنکام یبواح، ک. نیشیگاکی، ام. با استفاده از دادههای رادار دیافراگم مصنوعی (SAR) برای نقشهبرداری سیل آب رودخانه در منظر شهری: مطالعه موردی داکای بزرگ، بنگلادش. J. Jpn. Soc. هیدرول. منبع آب 2006 ، 19 ، 44-54. [ Google Scholar ] [ CrossRef ]
- Nath، RK; Deb، SK استخراج ناحیه آب بدن از تصاویر ماهواره ای با وضوح بالا – مقدمه، بررسی و مقایسه. بین المللی J. فرآیند تصویر. 2010 ، 3 ، 353-372. [ Google Scholar ]
- زنگ، ال. اشمیت، ام. لی، ال. Zhu، XX تجزیه و تحلیل تغییرات منطقه آبی دریاچه پویانگ با استفاده از تصاویر رادار دهانه مصنوعی Sentinel-1. بین المللی J. Remote Sens. 2017 , 38 , 7041–7069. [ Google Scholar ] [ CrossRef ]
- دینگ، XW; Li، XF نظارت بر تغییرات ناحیه آبی دریاچه دانگتینگ در چین با تصاویر ENVISAT ASAR. بین المللی J. Appl. زمین Obs. Geoinf. 2011 ، 13 ، 894-901. [ Google Scholar ] [ CrossRef ]
- کاستا، MPF؛ Telmer، KH استفاده از تصاویر SAR و پوشش گیاهی آبزی برای نقشهبرداری دریاچههای تازه و شور در تالاب پانتانال برزیل. سنسور از راه دور محیط. 2006 ، 105 ، 204-213. [ Google Scholar ] [ CrossRef ]
- گرونبلات، جی. Atwood، D. نقشه برداری دریاچه ها برای دسترسی به آب مایع زمستانی با استفاده از SAR در دامنه شمالی آلاسکا. بین المللی J. Appl. زمین Obs. Geoinf. 2014 ، 27 ، 63-69. [ Google Scholar ] [ CrossRef ]
- نری، تی. سادلر، آر. سولیس-آولستیا، م. سفید، بی. پولیاکوف، م. چالاک، م. مقایسه الگوریتمهای نظارت شده در طبقهبندی کاربری و پوشش زمین سریهای زمانی لندست. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور (IGARSS)، پکن، چین، 10 تا 15 ژوئیه 2016. موسسه مهندسین برق و الکترونیک: Piscataway، NJ، ایالات متحده آمریکا، 2016; صص 5165–5168. [ Google Scholar ]
- Shetty, S. Analysis of Machine Learning Classifiers for LULC Classification on Google Earth Engine Analysis of Machine Learning Classifiers for LULC Classification on Google Earth Engine. پایان نامه کارشناسی ارشد، Universidad de Twente، Enschede، هلند، 2019. [ Google Scholar ]
- لیاو، ا. وینر، ام. طبقه بندی و رگرسیون توسط جنگل تصادفی. R News 2002 , 2 , 18-22. [ Google Scholar ]
- Schapire، RE; فروند، ی. بارتلت، پی. لی، WS افزایش حاشیه: توضیحی جدید برای اثربخشی روش های رأی گیری. ان آمار 1998 ، 26 ، 1651-1686. [ Google Scholar ] [ CrossRef ]
- بریمن، ال. پیش بینی کننده های بگینگ. ماخ فرا گرفتن. 1996 ، 2 ، 123-140. [ Google Scholar ] [ CrossRef ]
- گولیک، ن. هنچر، م. دیکسون، ام. ایلیوشچنکو، اس. تاو، دی. Moore, R. Google Earth Engine: تجزیه و تحلیل جغرافیایی در مقیاس سیاره ای برای همه. سنسور از راه دور محیط. 2017 ، 202 ، 18-27. [ Google Scholar ] [ CrossRef ]
- تمیمینیا، اچ. صالحی، ب. مهدیان پری، م. کواکنبوش، ال. عادلی، س. Brisco، B. Google Earth Engine برای برنامه های کاربردی داده های جغرافیایی بزرگ: یک متاآنالیز و بررسی سیستماتیک. ISPRS J. Photogramm. Remote Sens. 2020 , 164 , 152–170. [ Google Scholar ] [ CrossRef ]
- Brownlee, J. Master Machine Learning Algorithms , 2016. در دسترس آنلاین: https://machinelearningmastery.com/master-machine-learning-algorithms/ (در 15 اکتبر 2020 قابل دسترسی است).
- SENAMHI Mapa Climático del Perú. در دسترس آنلاین: https://www.senamhi.gob.pe/?p=mapa-climatico-del-peru (در 22 اکتبر 2020 قابل دسترسی است).
- باربوزا-کاستیلو، ای. Maicelo-Quintana، JL; ویگو-مستانزا، سی. کاسترو سیلوپو، جی. Oliva-Cruz، SM Análisis morfométrico y batimétrico del lago Pomacochas (پرو). ایندز 2016 ، 2 ، 90–97. [ Google Scholar ] [ CrossRef ]
- ESA Sentinel-1. در دسترس آنلاین: https://sentinel.esa.int/web/sentinel/missions/sentinel-1 (در 12 ژانویه 2021 قابل دسترسی است).
- الگوریتم های GEE Sentinel-1. در دسترس آنلاین: https://developers.google.com/earth-engine/guides/sentinel1 (در 15 ژانویه 2021 قابل دسترسی است).
- Maitre, H. (ویرایش) پردازش تصاویر رادار دیافراگم مصنوعی ; ISTE Ltd Jhon Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008; شابک 978-1-84821-024-0. [ Google Scholar ]
- GEE ee.Image.focal_median. در دسترس آنلاین: https://developers.google.com/earth-engine/apidocs/ee-image-focal_median#javascript (در 15 ژانویه 2021 قابل دسترسی است).
- طبقه بندی نظارت شده GEE در دسترس آنلاین: https://developers.google.com/earth-engine/guides/classification (در 22 ژانویه 2021 قابل دسترسی است).
- بریمن، L. جنگل های تصادفی. ماخ فرا گرفتن. 2001 ، 45 ، 5-32. [ Google Scholar ] [ CrossRef ]
- بریمن، ال. جروم، اف. استون، سی جی; اولشن، RA طبقه بندی و رگرسیون درختان ; Taylor & Francis Group: Abingdon، UK، 1984; شابک 978-0-412-04841-8. [ Google Scholar ]
- Burges, CJC آموزش ماشینهای بردار پشتیبان برای تشخیص الگو. حداقل داده بدانید. کشف کنید. 1998 ، 2 ، 121-167. [ Google Scholar ] [ CrossRef ]
- Hsu، C.-W.; چانگ، سی.-سی. لین، سی.-جی. راهنمای عملی برای پشتیبانی از طبقه بندی برداری 2003 ; در دسترس آنلاین: https://www.bibsonomy.org/bibtex/2c04ef97dc3c3de168e684c3e4abe061b/jil (دسترسی در 15 اکتبر 2021).
- Stehman، SV انتخاب و تفسیر معیارهای دقت طبقه بندی موضوعی. سنسور از راه دور محیط. 1997 ، 62 ، 77-89. [ Google Scholar ] [ CrossRef ]
- پدرگوسا، اف. واروکو، جی. گرامفورت، آ. مایکل، وی. تیریون، بی. گریزل، او. بلوندل، م. پرتنهوفر، پی. ویس، آر. دوبورگ، وی. و همکاران Scikit-Learn: یادگیری ماشینی در پایتون. جی. ماخ. فرا گرفتن. Res. 2011 ، 12 ، 2825-2830. [ Google Scholar ]
- آلتمن، ن. Krzywinski، M. انجمن، همبستگی و علیت. نات. Methods 2015 ، 12 ، 899-900. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- آلتمن، ن. Krzywinski، M. رگرسیون خطی ساده. نات. Methods 2015 ، 12 ، 999-1000. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- sklearn.linear_model.LinearRegression. در دسترس آنلاین: https://scikit-learn.org/stable/modules/generated/sklearn.linear_model.LinearRegression.html (در 25 ژانویه 2021 قابل دسترسی است).
- sklearn.preprocessing.PolynomialFeatures. در دسترس آنلاین: https://scikit-learn.org/stable/modules/generated/sklearn.preprocessing.PolynomialFeatures.html (در 25 ژانویه 2021 قابل دسترسی است).
- sklearn.preprocessing.StandardScaler. در دسترس آنلاین: https://scikit-learn.org/stable/modules/generated/sklearn.preprocessing.StandardScaler.html (در 26 ژانویه 2021 قابل دسترسی است).
- Vapnik، VN ماهیت نظریه یادگیری آماری . Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2000. [ Google Scholar ]
- sklearn.svm.SVR. در دسترس آنلاین: https://scikit-learn.org/stable/modules/generated/sklearn.svm.SVR.html (در 25 ژانویه 2021 قابل دسترسی است).
- پشتیبانی از رگرسیون برداری (SVR) با استفاده از هسته های خطی و غیر خطی – مستندات Scikit-Learn 1.1.2. در دسترس آنلاین: https://scikit-learn.org/stable/auto_examples/svm/plot_svm_regression.html#sphx-glr-auto-examples-svm-plot-svm-regression-py (دسترسی در 5 اکتبر 2022).
- sklearn.ensemble.RandomForestRegressor. در دسترس آنلاین: https://scikit-learn.org/stable/modules/generated/sklearn.ensemble.RandomForestRegressor.html#examples-using-sklearn-ensemble-randomforestregressor (در 25 ژانویه 2021 قابل دسترسی است).
- sklearn.tree.DecisionTreeRegressor. در دسترس آنلاین: https://scikit-learn.org/stable/modules/generated/sklearn.tree.DecisionTreeRegressor.html (در 25 ژانویه 2021 قابل دسترسی است).
- معیارها و امتیازدهی: کمی کردن کیفیت پیش بینی ها. در دسترس آنلاین: https://scikit-learn.org/stable/modules/model_evaluation.html#regression-metrics (در 26 ژانویه 2021 قابل دسترسی است).
- seaborn.boxenplot. در دسترس آنلاین: https://seaborn.pydata.org/generated/seaborn.boxenplot.html#seaborn.boxenplot (دسترسی در 25 مارس 2021).
- هافمن، اچ. کفادار، ک. ویکهام، اچ. نمودارهای ارزش حرف: نمودارهای جعبه ای برای داده های بزرگ. صبح. آمار 2011 ، 22. [ Google Scholar ] [ CrossRef ]
- استروزی، تی. ویزمن، آ. کاب، ع. جوشی، س. Mool, P. نقشه برداری دریاچه یخبندان با داده های SAR ماهواره ای با وضوح بسیار بالا. نات. سیستم خطرات زمین. علمی 2012 ، 12 ، 2487-2498. [ Google Scholar ] [ CrossRef ]
- جیانگ، ز. جیانگ، دبلیو. لینگ، ز. وانگ، ایکس. پنگ، ک. وانگ، سی. استخراج آب سطحی و تجزیه و تحلیل دینامیکی دریاچه بایانگدیان بر اساس پلتفرم موتور Google Earth با استفاده از Sentinel-1 برای گزارش شاخصهای SDG 6.6.1. Water 2021 , 13 , 138. [ Google Scholar ] [ CrossRef ]
- کالیبراسیون رادیومتریک محصولات سطح 1 آژانس فضایی اروپا. در دسترس آنلاین: https://sentinel.esa.int/web/sentinel/radiometric-calibration-of-level-1-products (در 26 سپتامبر 2021 قابل دسترسی است).
- لی، جی. وانگ، اس. روشی خودکار برای نقشه برداری آب های سطحی داخلی با تصاویر رادارست-2. بین المللی J. Remote Sens. 2015 ، 36 ، 1367-1384. [ Google Scholar ] [ CrossRef ]
- هوریت، ام اس؛ میسون، دی سی؛ تعیین مرز لاکمن، AJ Flood از تصاویر رادار دیافراگم مصنوعی با استفاده از یک مدل کانتور فعال آماری. بین المللی J. Remote Sens. 2001 , 22 , 2489-2507. [ Google Scholar ] [ CrossRef ]
- شاخص هایی برای اهداف توسعه پایدار در دسترس آنلاین: https://sdg.data.gov/es/ (دسترسی در 24 مه 2021).
- پانده چهتری، ر. عبدالرحمن، ع. لیو، تی. مورتون، جی. ویلهلم، VL طبقهبندی شیمحور پوشش گیاهی تالاب با استفاده از تصاویر سیستم هوای بدون سرنشین با وضوح بالا. یورو J. Remote Sens. 2017 ، 50 ، 564-576. [ Google Scholar ] [ CrossRef ]
- استاتنیکوف، آ. وانگ، ال. Aliferis، CF مقایسه جامع جنگلهای تصادفی و ماشینهای بردار پشتیبان برای طبقهبندی سرطان مبتنی بر ریزآرایه. BMC Bioinform. 2008 ، 9 ، 319. [ Google Scholar ] [ CrossRef ]
- لیو، ام. وانگ، ام. وانگ، جی. لی، دی. مقایسه جنگل تصادفی، ماشین بردار پشتیبان و شبکه عصبی انتشار پشتی برای طبقه بندی داده های زبان الکترونیکی: کاربرد برای شناخت نوشیدنی پرتقال و سرکه چینی. سنسور محرک B Chem. 2013 ، 177 ، 970-980. [ Google Scholar ] [ CrossRef ]
- لیو، تی. عبدالرحمن، ع. مورتون، جی. Wilhelm, VL مقایسه شبکههای کاملاً کانولوشن، جنگل تصادفی، ماشین بردار پشتیبان و شبکههای عصبی کانولوشن عمیق مبتنی بر پچ برای نقشهبرداری تالاب مبتنی بر شی با استفاده از تصاویر سیستم هواپیمای بدون سرنشین کوچک. GISci. Remote Sens. 2018 , 55 , 243–264. [ Google Scholar ] [ CrossRef ]
- والدز-لازالده، جی آر. González-Guillén، MdJ; د لس سانتوس-پوساداس، HM Estimación de cobertura arbórea mediante images satelitales multispectrales de alta resolución. Agrociencia 2006 ، 40 ، 383-394. [ Google Scholar ]
- ویلا، اچ. پرز پنیا، جی. گارسیا، ام. والون، آرسی ماسترانتونیو، ال. اولمدو، جی اف. رودریگز پلازا، ال. Salcedo، C. Congreso Internacional de la AET. “Teledetección Hacia un Mejor Entendimiento de la Dinámica Global y Regional” ; Estación Experimental Agropecuaria Mendoza INTA: Mendoza، آرژانتین، 2007. [ Google Scholar ]
- موریرا، ا. Prats-Iraola، P. یونس، م. کریگر، جی. هاجنسک، آی. پاپاتاناسیو، ک. آموزش رادار دیافراگم مصنوعی. IEEE Geosci. سنسور از راه دور Mag. 2013 ، 1 ، 6-43. [ Google Scholar ] [ CrossRef ]
- یونس، CRC; لوپز، آر اس؛ کروز، SMO; کاستیلو، EB; لوپز، JOS؛ تریگوسو، دی. Briceño، تناسب زمین NBR برای آبزی پروری پایدار قزل آلای رنگین کمان ( Oncorhynchus mykiss ) در Molinopampa (پرو) بر اساس RS، GIS، و AHP. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 28. [ Google Scholar ] [ CrossRef ]
- جین مینگ، ی. لی گانگ، ام. چنگ ژی، ال. یانگ، ال. جیان لی، دی. Sheng-Tian، Y. تغییرات زمانی-فضایی و عوامل تأثیرگذار دریاچه ها در مناطق خشک داخلی از سال 2000 تا 2017: مطالعه موردی در سین کیانگ. Geomat. نات. خطر خطرات 2019 ، 10 ، 519-543. [ Google Scholar ] [ CrossRef ]
- ولی پور، م. کالیبراسیون مدلهای مبتنی بر انتقال جرم برای پیشبینی تبخیر و تعرق گیاه مرجع. Appl. علوم آب 2017 ، 7 ، 625-635. [ Google Scholar ] [ CrossRef ]
- ایروین، ک. براون، آ. فوتوپولوس، جی. راث، ا. Wessel, B. ارزیابی داده های TerraSAR-X تک قطبی و دو قطبی برای پایش آب های سطحی. Remote Sens. 2018 , 10 , 949. [ Google Scholar ] [ CrossRef ]
- اسکات، کالیفرنیا؛ خو، ال. Pour, HK بازیابی مشاهدات یخ/آب از تصاویر رادار روزنه مصنوعی برای استفاده در جذب داده های یخ دریاچه. J. Great Lakes Res. 2020 ، 46 ، 1521-1532. [ Google Scholar ] [ CrossRef ]
- ویکرز، اچ. مالنز، ای. هوگدا، K.-A. پایش بلند مدت سطح آب و سطح آب مشتق شده با استفاده از رادار دهانه مصنوعی (SAR) در Altevatn، یک دریاچه قطب شمال با اندازه متوسط. Remote Sens. 2019 , 11 , 2780. [ Google Scholar ] [ CrossRef ]
- ژانگ، اچ. ژانگ، ی. Lin, H. مطالعه مقایسه ای برآورد سطوح غیرقابل نفوذ با استفاده از تصاویر سنجش از دور نوری و SAR. بین المللی J. Appl. زمین Obs. Geoinf. 2012 ، 18 ، 148-156. [ Google Scholar ] [ CrossRef ]
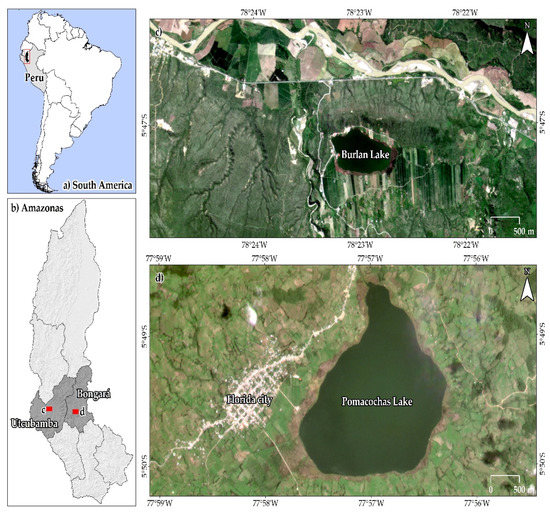
شکل 1. موقعیت جغرافیایی دریاچه های مورد مطالعه در شمال غربی پرو.
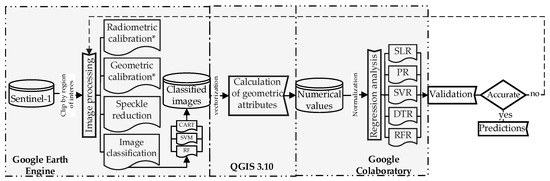
شکل 2. طراحی روش شناختی برای تجزیه و تحلیل دینامیک سطح آب دریاچه های بورلان و پوماکوچاس طی سال های 2014-2020 با استفاده از تصاویر SAR. * این روش به صورت داخلی توسط GEE انجام شد.
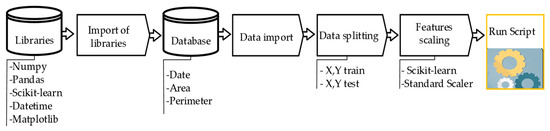
شکل 3. جریان روش شناختی برای تحلیل رگرسیون.
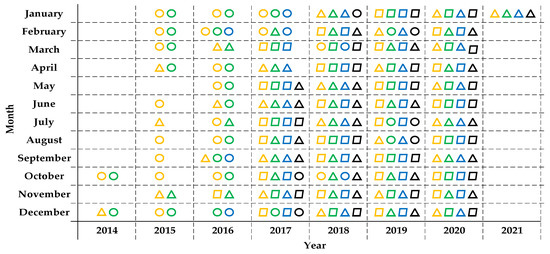
شکل 4. توزیع و در دسترس بودن ماهانه تصاویر Sentinel-1 مورد استفاده برای تجزیه و تحلیل پویایی دریاچه های بورلان و پوماکوچاس از سال 2014 تا 2021. شکل های هندسی تعداد تصاویر موجود در یک ماه را نشان می دهد که در آن دایره ها، مثلث ها و متوازی الاضلاع هستند. به ترتیب 1، 2 و 3 تصویر را نشان می دهند. علاوه بر این، رنگ هر یک نشان دهنده ترکیب جهت عبور و قطبی شدن است که در آن رنگ های نارنجی، سبز، آبی و سیاه به ترتیب نشان دهنده ترکیب DVV، AVV، DVH و AVH هستند.
شکل 5. تغییر در مساحت و محیط دریاچه های Burlan و Pomacochas با استفاده از CART، RF و SVM به عنوان طبقه بندی کننده تصاویر SAR. خطوط ضخیم نشان دهنده مساحت (ha) و خطوط نازک نشان دهنده محیط (km) هستند. علاوه بر این، خطوط بنفش، سبز و آبی به ترتیب مقادیر بدست آمده توسط SVM، CART و RF را نشان می دهند. علاوه بر این، AVH، AVV، DVH و DVV، مجموعه داده های به دست آمده را نشان می دهد: جهت پرواز صعودی (A) و نزولی (D)، قطبش های ارسال شده و دریافت شده به صورت عمودی (VV) و ارسال به صورت عمودی و دریافت شده به صورت افقی (VH).
شکل 6. مقادیر متوسط مساحت ( a ) و ( b ) محیط دریاچه های پوماکوچاس و بورلان.
شکل 7. پراکندگی داده های مساحت و محیط دریاچه های بورلان و پوماکوچاس، که در آن نقاط سیاه نشان دهنده نقاط پرت و مستطیل ها بالاترین خوشه بندی داده ها را بر اساس چندک ها نشان می دهند.
شکل 8. مدل های رگرسیون با R 2 بیشتر برای داده های مساحت و محیط دریاچه بورلان.
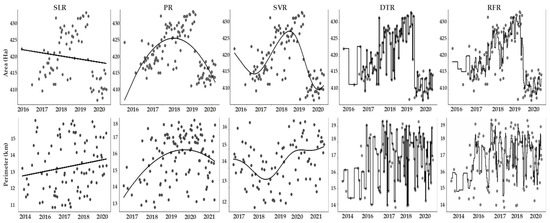
شکل 9. مدل های رگرسیون با R 2 بالاتر برای داده های مساحت و محیط دریاچه پوماکوچاس.
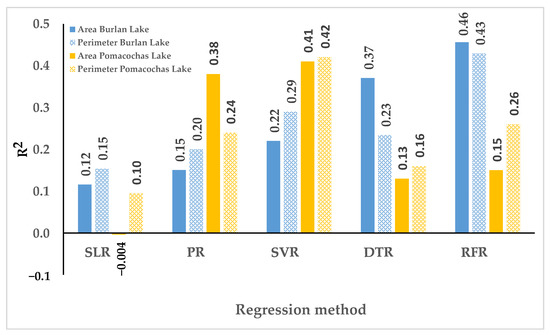
شکل 10. مقایسه R2 محاسبه شده برای مدل های SLR، PR، SVR، DTR، و RFR.
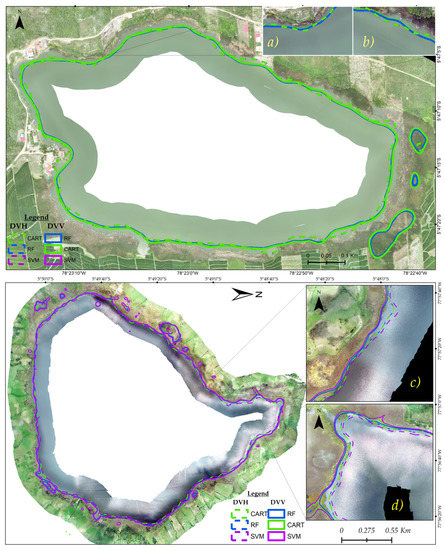
شکل 11. همپوشانی طبقه بندی SAR و ارتوموزائیک دریاچه های بورلان (بالا) و پوماکوچاس (پایین) برای 2021-02-10، و زیرشکل های ( a – d ) نشان دهنده بزرگنمایی هر منطقه برای تجسم نتیجه طبقه بندی در ارتوموزائیک RPAS است. .
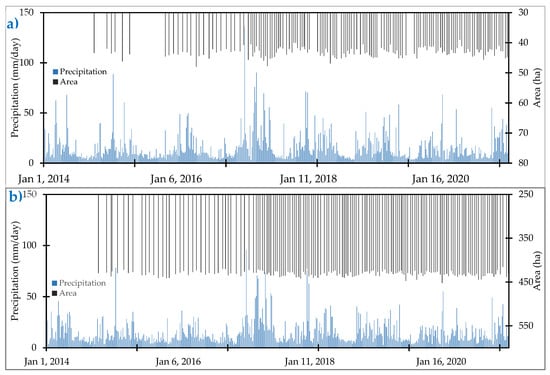
شکل 12. توزیع روزانه بارش برای ( الف ) دریاچه های بورلان و ( ب ) پوماکوچاس.


بدون دیدگاه