

خلاصه
:
مدل شهر سه بعدی ابزاری بصری است که برای توصیف شهرها استفاده می شود. در حال حاضر، فناوری سطح از جزئیات (LOD) برای برآورده کردن نیازهای بصری مختلف برای مدلهای سه بعدی شهر با وزن دادن به راندمان رندر در برابر جزئیات مدل استفاده میشود. با این حال، هنگامی که تقاضاهای بصری تغییر می کند، پدیده “popping” هنگام ایجاد دگرگونی بین مدل های مختلف LOD ظاهر می شود. ما این پدیده پوپینگ را با بهبود ساختار دادهای که بر مدلهای ساختمانسازی سه بعدی شهر متمرکز است، بهینه کردیم و آن را با الگوریتم تغییر چهره بر اساس حداقل ویژگیها ترکیب کردیم. برخلاف تولید مدلهای محدود LOD از قبل، ساختار داده توپولوژی LOD پیوسته پیشنهادی میتواند تغییرات بین مدلهای LOD مختلف را ذخیره کند. با استفاده منطقی از اطلاعات تغییر، تبدیل پیوسته LOD امکان پذیر می شود.
کلید واژه ها:
ساختار داده توپولوژیکی ; ساختمان های سه بعدی شهر ; سطح جزئیات ؛ تبدیل مداوم
1. معرفی
با ظهور علم داده، موج اطلاعات شهری تأثیر زیادی بر مشاغل و مشاغل مختلف داشته است و “شهر هوشمند” در سطح جهانی به یک نظریه و عمل جدید برای توسعه شهری نسل بعدی تبدیل شده است [ 1 ]. شهر هوشمند فضای ادغام مجازی و واقعی است که از ادغام ارگانیک شهرهای دیجیتال و فیزیکی از طریق اینترنت شکل گرفته است. این فضا فضای سایبری-فیزیکی [ 2 ] نیز نامیده می شود و کلید توسعه آن در درک دقیق اطلاعات جغرافیایی نهفته است. مدلهای شهر سه بعدی (3 بعدی) میتوانند اطلاعات جغرافیایی را به شیوهای جذابتر ارائه دهند [ 3 ] که میتواند مدلهای واقعی و گویا را در برنامهریزی شهری و مناطق مرتبط ارائه کند. 4 ]]. استفاده منطقی از مدلهای سهبعدی شهر به ارتقای سطح برنامهریزی شهری و ارائه مراجع برای فرآیندهای ساختوساز واقعی کمک میکند، که همچنین نقش مهمی در تخصیص منطقی هزینهها و منابع ساخت و ساز دارد. مدلهای سه بعدی شهر به عنوان پایه کاربردی تجسم اطلاعات موضوعی برنامهریزی شهری [ 5 ، 6 ، 7 ، 8 ، 9 ] در نظر گرفته میشوند که به یک نقطه داغ تحقیقاتی در زمینه شهر هوشمند تبدیل شده است.
با این حال، در فرآیند کاربرد شهرهای سه بعدی، فشار بسیار زیاد بر سیستم های پردازش کامپیوتری به دلیل حجم عظیم داده های ساختمان های سه بعدی، کاربرد عملی مدل های سه بعدی شهر را تا حدی خنثی می کند. بنابراین، رندر کردن مدلهای ساختمانی سه بعدی با سطوح مختلف جزئیات (LOD) با فرض حفظ دقت هندسی فضایی و ترجیح دید انسان به درک جامع ساختمانها [ 10 ] و کاهش فشار دادهها در فرآیند کاربرد مدلهای سهبعدی شهر کمک میکند.
با هدف تنش بین نیاز روزافزون به نمایش واقعی صحنههای پیچیده، عملکرد محدود سختافزار و نرمافزار سیستم، و هزینه نیروی انسانی و منابع مادی در فرآیند کاربرد گسترده مدلهای سه بعدی شهر، فناوری LOD [ 11 ] یکی از متداول ترین روش های مورد استفاده برای حل این تناقض [ 12]. این یک تکنیک پرکاربرد برای حل مشکل رندر برای تجسم سه بعدی بلادرنگ است، زیرا رندر کردن حجم عظیمی از داده های هندسی سه بعدی به منابع کامپیوتری قابل توجهی نیاز دارد که گاهی بسیار فراتر از ظرفیت یک دستگاه گرافیکی است. تکنیک LOD از مدل های مختلفی برای نمایش یک شی استفاده می کند و مدل ها دارای درجات مختلفی از جزئیات هستند. با توجه به نیازهای بصری، منابع کامپیوتری را می توان برای رندر کردن مدل ها اختصاص داد. اگر شی از اهمیت خاصی برخوردار نباشد، مدلهایی در سطحی با جزئیات کمتر انتخاب میشوند تا عملیات رندر کارآمد به دست آید. به این ترتیب، می توان کارایی رندر را بهینه کرد و جلوه های بصری را به واقعیت نزدیک کرد.
تکنیک LOD را می توان به LOD های گسسته و پیوسته تقسیم کرد [ 12 ]. تکنیک LOD گسسته چندین مدل را در سطوح مختلف جزئیات پیش تولید و ذخیره می کند. زمان پردازش مدل های ساده شده بلادرنگ را حذف می کند. با این حال، فضای ذخیره سازی بیشتری را اشغال می کند و جلوه های بصری را در حالی که از یک سطح جزئیات به سطح دیگر تغییر می دهد، تغییر می دهد. تلاشهای تحقیقاتی نتایج قابلتوجهی در رابطه با تکنیک LOD گسسته، از الگوریتمها تا مشخصات [ 13 ، 14 ، 15 ، 16 به دست آورده است.]. تکنیک LOD پیوسته به صورت پویا مدلهایی را در سطوح مختلف جزئیات با توجه به فاصله دیدگاه تولید میکند و هدف آن تغییر مدلها بدون فاجعههای بصری است. روشی که توسط آن تولید سریع و بلادرنگ LODهای پیوسته ایجاد می شود در حال حاضر یک موضوع تحقیقاتی مهم است. در تحقیق بر روی 3DCM، پیشرفت زیادی در فناوری LOD های پیوسته زمین در مقیاس بزرگ بر اساس داده های واقعی حاصل شده است. بسیاری از الگوریتمهای LOD پیوسته مبتنی بر شبکههای منظم، نمایش بلادرنگ زمین در مقیاس بزرگ را درک کردهاند [ 17 ، 18 ، 19 ، 20 ، 21 ]. با این حال، تحقیقات فناوری LOD پیوسته برای ساختمان ها هنوز در مراحل اولیه است.
در حال حاضر، پیشرفت الگوریتم های LOD برای مدل های ساختمانی سه بعدی عمدتاً در زمینه ساده سازی هندسی تجسم یافته است. فوربرگ [ 22 ] ویژگی های ساختمان سه بعدی را بر اساس مورفولوژی ریاضی ساده کرد. بایگ [ 23 ]، جی [ 24 ] و یان [ 25] سطوح مشخصه (ردپا و ارتفاع ساختمان) مدل های ساختمان را با محدود کردن تعداد لبه ها، منحنی ها و زاویه ها در صفحه مشخصه ساده کرد، بنابراین ساختمان سه بعدی را ساده کرد. ایده اصلی این نوع روش کاهش مدل سه بعدی به یک سطح دو بعدی و سپس ساده سازی سطح دو بعدی است که به این معنی است که تنها یک جنبه از ساختمان در نظر گرفته می شود و تضمین نمودن اثر بیان کلی ساختمان سه بعدی را دشوار می کند. با توجه به ساده سازی ساختمان در سطح سه بعدی، فن [ 26 ] و زی [ 27 ]] به طور جامع ویژگی های دیوارها و سقف ساختمان ها را در نظر گرفت، به طور مستقل دیوارها و سقف ها را در فرآیند ساده سازی ساده کرد و سپس دیوارها و سقف های ساده شده را به هم متصل کرد تا ساده سازی ساختمان های سه بعدی کامل شود. Xie [ 10 ] روشهای سادهسازی و تجمیع ساختمانهای سه بعدی را مطالعه کرد و بر این اساس، به تجسم چند مقیاسی یک شهر سه بعدی پی برد.
با این حال، الگوریتم های LOD ساختمان سه بعدی فعلی به تولید مدل های ساختمانی سه بعدی از هر LOD مربوط می شوند. بیشتر مطالعات به حالت تبدیل و بهبود اثر تبدیل بین مدل های ساختمان سه بعدی هر LOD توجه کمی دارند. در حال حاضر، روش اصلی تبدیل پیوسته مدل های ساختمانی سه بعدی “محو شدن” است که مبتنی بر فناوری LOD گسسته است. از جلوه شفاف رندر سخت افزار گرافیکی استفاده می کند و با تنظیم ویژگی های شفاف اشیاء خاص در مراحل مختلف، انتقال مدل ها را در سطوح مختلف جزئیات محقق می کند. با این حال، این روش باید چندین مدل را در سطوح مختلف جزئیات به طور همزمان ترسیم کند، که منابع سیستم بیشتری را اشغال می کند. علاوه بر این، هنگام انتقال مدل ها،28 ]. به منظور بهبود جلوه تجسم صحنه های سه بعدی [ 29 ، 30 ، 31 ] و کاهش تأثیر جهش بصری ناشی از تبدیل یک مدل بین سطوح مختلف جزئیات بر روی جلوه بصری، در نتیجه بهینه سازی استفاده از حافظه در فرآیند LOD تبدیل مدل، مطالعه روش تبدیل در سطح جزئیات مدلهای ساختمان همراه با یک الگوریتم سادهسازی LOD ساختمان ضروری است.
در این مقاله، یک ساختار داده مبتنی بر توپولوژی LOD پیوسته پیشنهاد شده است که به طور مصنوعی روش کلی سادهسازی LOD ساختمان سه بعدی را در نظر میگیرد. ساختار داده لبه ها و سطوح مش مثلثی ساختمان سه بعدی را با تنظیم رابطه متناظر بین داده های هندسی مدل ساختمان سه بعدی در LOD های مختلف محدود می کند. با توجه به مراحل مختلف تبدیل، وضعیت استفاده از دادههای هندسی LOD مربوطه تعریف میشود، بنابراین تبدیل پیوسته LOD یک مدل ساختمانی سهبعدی محقق میشود.
2. ساختارهای داده پیوسته LOD برای مدل های ساختمانی سه بعدی
2.1. ویژگی های اساسی مدل های ساختمان سه بعدی
برای هر مدل ساختمان سه بعدی شهری مستقل، اطلاعات ساختاری شامل سقف ها، دیوارها، ردپاها، پنجره ها و غیره است. این اطلاعات ساختاری شکل و پیچیدگی مدل ساختمان سه بعدی را تعیین می کند که در میان آنها سقف بیشترین تفاوت را ایجاد می کند. به غیر از برخی ساختمان های خاص، سقف ساختمان های معمولی را می توان به چند شکل اصلی مانند سقف های مسطح، گلدسته و شیبدار تقسیم کرد.
با توجه به عمودی بودن کل دیوار نسبت به زمین، ساختمان ها را می توان به دو نوع معمولی و خاص تقسیم کرد. به ساختمان هایی که دیوارهای عمودی نسبت به زمین دارند، ساختمان های معمولی می گویند. تعداد بسیار کمی از ساختمان ها با دیوارهای غیر عمودی (بیشتر ساختمان های معرف در شهرها) ساختمان های ویژه نامیده می شوند. در مقایسه با ساختمان های معمولی، اطلاعات ساختاری ساختمان های خاص پیچیده تر و متنوع تر است. بنابراین، روش های خاصی برای سنتز آنها با توجه به شکل آنها مورد نیاز است که پردازش مدل ها را به صورت دسته ای دشوار می کند. با این حال، برای ساختمان های معمولی، شکل کلی ساختمان همیشه توسط سقف و ردپا تعیین می شود، در حالی که جزئیات ساختمان توسط اطلاعات ساختاری مانند پنجره ها و درها تعیین می شود. از این رو، پردازش دسته ای ساختمان های معمولی تا زمانی امکان پذیر است که روش پردازش معقول باشد. بنابراین، از منظر تعمیم ساختمان سه بعدی، با فرض تضمین شکل کلی ساختمان، ساده سازی و مرمت ساختمان های سه بعدی باید از دو جنبه انجام شود: پردازش سقف و دیوار.
دیوارهای ساختمان های معمولی را می توان به طور تقریبی به سه دسته تقسیم کرد ( شکل 1 ): دیوارهای مسطح، دیوارهایی با قسمت های ناهموار در یک طرف و دیوارهایی با قسمت های ناهموار در دو طرف. سطح تشکیل دهنده دیوار را سطح مشخصه دیوار می نامند. ویژگی های دیوار به موقعیت و شکل سطح مشخصه مربوط می شود.
سبک های سقف ساختمان های شهری را می توان به طور تقریبی به سه دسته تقسیم کرد ( شکل 2 ): سقف های مسطح، گلدسته و شیب دار.
سادهسازی LOD مدلهای ساختمانهای سهبعدی با سایر مدلهای سهبعدی متفاوت است، زیرا باید بردار معمولی سطح ساختمان را بدون تغییر نگه دارد (دیوار همیشه عمودی و شیب سقف ثابت است) و شکل اصلی مدل ساختمانی سهبعدی را حفظ کند. (موقعیت و اندازه سطح مشخصه) بدون تغییر. بنابراین، کلید سادهسازی مدل ساختمان سهبعدی، پرداختن به جزئیات دیوار/سقف با ثابت نگه داشتن شکل اولیه و ویژگیهای مکان دو جزء اصلی (دیوار و سقف) است.
2.2. روش نمایش برای مدل ساختمان سه بعدی
در یک صحنه سه بعدی، متداول ترین روش نمایش مدل، نمایش مرزی (BR) است. ایده اصلی BR نشان دادن شکل هندسی و موقعیت مکانی یک مدل جامد با راس، لبه و مثلث است که به روش نمایش توصیف مرز جامد تعلق دارد. در BR، به منظور عملکرد راحت همه عناصر موجودیت و سایر پارامترهای مربوط به مدل هندسی، ویژگیهای هندسی (موقعیت و جهت) و ساختار توپولوژیکی مدل موجودیت با جزئیات حفظ میشوند، که این مزیت را نشان میدهد که تعیین منحصر به فرد را نشان میدهد. مدل.
2.2.1. نمایش مش مثلثی
اطلاعات هندسی شامل تعداد رئوس، مختصات هر رأس، تعداد مثلث ها و شاخص های سه راس در هر مثلث است. شیء ساده شده معماری سه بعدی عمدتاً اطلاعات هندسی مدل است. در مدل مش مثلثی، هر رأس متعلق به دو یال یا چند مثلث است، هر یال دو راس را به هم متصل می کند (همچنین متعلق به دو مثلث است) و مثلث ها به یکدیگر متصل می شوند.
روش اشاره گر جدول رأس هنگام تعریف چند ضلعی یک اشاره گر جدول راس را معرفی می کند. هنگام استفاده از این روش، تمام رئوس در مدل مش فقط یک بار در حافظه ذخیره می شوند، که کمبود ذخیره سازی مکرر راس در نمایش مستقیم راس را برطرف می کند. دنباله رأس V در شکل 3 نشان داده شده است و سپس یک جدول شاخص تعریف شده است که به دنباله رئوس V اشاره می کند. در این شکل P 1 = (1, 2, 4) و P 2 = (4,2, 3).
2.2.2. جهت گیری مش مثلثی
برای هر ویژگی سطحی P در مدل سه بعدی، اجازه دهید راس آن باشد ( v i ، v j ، v k ). وقتی راس P در جهت عقربه های ساعت باشد، جهت P منفی تعریف می شود. در غیر این صورت، جهت P مثبت تعریف می شود. برای بیان جهت یک مثلث با یک فرمول، اجازه دهید e i,j بردار نرمال از v i به v j باشد، e j,k بردار نرمال از v j به v k باشد و یک بردار تعریف کنید. r باشد.= (0،0،1). جهت مثلث P به صورت ORP ( v i , v j , v k ) تعریف می شود.
O R P(vمن،vj،vک) =⎧⎩⎨⎪⎪1 ( همن ، ج×هj ، k⋅ r > 0 )0 ( همن ، ج×هj ، k⋅ r = 0 )− 1 ( همن ، ج×هj ، k⋅ r < 0 ).�آرپ(�من،��،�ک)={1 (همن،�×ه�،ک⋅�>0)0 (همن،�×ه�،ک⋅�=0)-1 (همن،�×ه�،ک⋅�<0).
وقتی جهت یک مثلث ORP ( v i , v j , v k ) = 0 باشد، به این معنی است که راس این مثلث روی یک خط مستقیم است. همچنین به این معنی است که این نوع مثلث در تبدیل مقیاس مدل سه بعدی عمل نمی کند. هنگامی که ORP ( v i ، v j ، v k) ≠ 0، رئوس مثلث خطی نیستند. اگر مثلث روی یک سطح مشخصه ساختمان قرار گیرد، مثلث در عملیات ترجمه شرکت خواهد کرد. اگر مثلث روی یک سطح غیر مشخصه قرار گیرد، خود مثلث در عملیات ترجمه شرکت نمی کند، اما باید نقاط خطی بین جبهه های غیر خاص و سطوح مشخصه وجود داشته باشد، در حالی که این نقاط خطی، به عنوان رئوس تشکیل دهنده سطوح ویژگی، همچنان در عملیات ترجمه شرکت خواهد کرد.
2.3. تبدیل جزئیات مدل ساختمان سه بعدی
بیشتر ساختمان های شهری دارای ساختارهای موازی هستند و ویژگی ها عمدتاً شامل دو شکل مختلف است: برآمدگی و فرورفتگی. در این مطالعه، الگوریتم تغییر چهره بر اساس حداقل ویژگی ها [ 32 ] برای ساده سازی ساختار برآمدگی یا فرورفتگی یک ساختمان با 3DS به عنوان فرمت خروجی داده استفاده شد. مدل با فرمت 3DS اطلاعات هندسی مدل شامل تعداد رئوس، مختصات هر راس، تعداد مثلث ها و شاخص سه راس روی هر مثلث را ذخیره می کند. اصل اساسی الگوریتم تغییر جنبه این است که برای مدل تفصیلی M، ویژگی با اهمیت کم (که در این کار با نسبت مساحت اندازه گیری شد) هر بار به ویژگی با اهمیت بالا منتقل می شود و وضوح وضوح به تدریج کاهش می یابد. در نهایت، ساختمان سه بعدی ساده شده مدل M 0 و یک سری اطلاعات ثبت دقیق به دست می آید. با قرار دادن مجدد گره ها و مثلث ها در مش، می توان مدل را با وضوح اصلی خود بازیابی کرد.
فرآیند ساده شده از M تا M 0 حذف یک سطح مشخصه P 1 از مش و نمایش سطح مشخصه از پیش حذف شده P 1 بر روی سطح مشخصه P 2 برای تشکیل گره های جدید V a “ ، Vb “ ، Vc ” است . و V d . _ دو سطح غیر مشخصه NP 1 و NP 2 که در مجاورت سطح مشخصه هستند نیز حذف می شوند (همانطور که در نشان داده شده استشکل 4). با ادامه عملیات ترجمه سطحی، رئوس و مثلث ها در مدل ساختمان سه بعدی به تدریج کاهش می یابد. بنابراین، جزئیات مدل به تدریج کاهش می یابد.
در مقابل، فرآیند بازسازی M از M 0 ، یعنی فرآیند کاهش (vsplit)، فرآیند معکوس فرآیند ساده شده است که با افزودن گره های اصلی Va ، Vb ، Vc ، و Vd و دو سطح غیر مشخصه NP انجام می شود. 1 و NP 2 تا M 0 .
فرآیند فوق را می توان به صورت بیان کرد
فرآیند ساده شده (ecol): ( م=مn)e c oلn – 1مn – 1⋯م2e c oل1م1e c oل0م0(م=م�)هج�ل�-1م�-1⋯م2هج�ل1م1هج�ل0م0;
فرآیند کاهش (vsplit): م0v s p l iتی0م1v s p l iتی1م2⋯مn – 1v s p l iتیn – 1( م=مn)م0�سپلمنتی0م1�سپلمنتی1م2⋯م�-1�سپلمنتی�-1(م=م�).
بنابراین، تبدیل LOD یک مدل ساختمان سه بعدی را می توان از یک مدل دقیق M و مجموعه ای از رکوردهای اطلاعاتی فرآیند ترجمه صفحه ({ ecol n -1 ،……، ecol 0 }) تشکیل داد، که می تواند به صورت PM بیان شود. = { M , { ecol n −1 ,……, ecol 0}}. به منظور بازیابی صحیح ساختار توپولوژیکی مدل دقیق اصلی در بازسازی مش مثلثی مدل سه بعدی، لازم است اطلاعات مربوط به هر ترجمه صفحه ثبت شود. به منظور تحقق تحول مداوم سطح جزئیات مدل ساختمان سه بعدی، لازم است ساختار داده مدل ساختمان سه بعدی بهبود یابد.
2.4. ساختار داده توپولوژیکی LOD پیوسته یک مدل ساختمانی سه بعدی
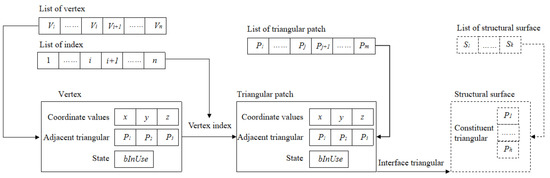
برای بازسازی مش مثلثی یک مدل ساختمانی سه بعدی، لازم است اطلاعات مربوط به هر سطح ترجمه ثبت شود. این مقاله یک ساختار داده توپولوژیکی LOD پیوسته بر اساس سازمان دهی داده های هندسی بهبود یافته (همانطور که در شکل 5 نشان داده شده است ) ارائه می کند که شامل داده های ویژگی هندسی (راس ها و تکه های مثلثی)، داده های روابط توپولوژیکی (اشاره گیری اشاره گر)، و وضعیت داده هندسی ( bInUse ) است. . راس با عدد ترتیبی نقطه در لیست راس و مثلث با عدد ترتیبی وصله مثلثی در لیست پچ مثلثی نمایه می شود. هر نقطه یا وصله مثلثی موقعیت ثابت خود را در ساختار داده دارد.
داده های هندسی شامل داده های هندسی حمل شده توسط مدل اصلی ساختمان سه بعدی و داده های هندسی جدید تولید شده توسط محاسبات مکانی در هر مرحله از تبدیل مقیاس است. داده های هندسی در حالت استفاده نشان می دهد که از آنها برای بیان اجسام سطحی یا حجمی در برخی از مراحل تبدیل مقیاس استفاده می شود و باید در مرحله تجسم ترسیم شوند. در غیر این صورت، آنها نباید ترسیم شوند. با تنظیم سطح مشخصه مدل و رئوس تشکیل دهنده سطح ویژگی، می توان دید داده های هندسی را در فرآیند تبدیل مقیاس مدل کنترل کرد و مدل های ساختمانی سه بعدی در مقیاس های مختلف را در LOD پیوسته نشان داد.
هنگامی که سطح مشخصه ثانویه در سطح مشخصه غالب ادغام می شود، مقدار مختصات راس از پیش پنهان در لیست راس حفظ می شود، حالت استفاده ( bInUse ) به حالت عدم استفاده ( N ) تغییر می کند، در حالی که مقدار مختصات از پیش پنهان شده است. سطح مشخصه در لیست پچ مثلثی حفظ می شود و حالت استفاده ( bInUse ) به حالت عدم استفاده ( N ) تغییر می کند. در این بین، ساختار داده مربوطه سطوح به روز می شود.
در مقابل، هنگامی که جزئیات مدل بازیابی می شوند، از ریشه استفاده می شود. با توجه به تعداد شاخص رئوس اضافی، حالت استفاده ( bInUse ) نقاط پنهان مربوطه در لیست راس به حالت استفاده ( Y ) تغییر می کند، در حالی که حالت استفاده ( bInUse ) رئوس اضافی به حالت عدم استفاده تغییر می کند. ( ن ). در این بین، با توجه به تعداد شاخص سطوح مشخصه اضافی، حالت استفاده ( bInUse ) سطوح پنهان مربوطه در لیست راس به حالت استفاده ( Y ) و حالت استفاده از سطوح مشخصه اضافی به تغییر می یابد. حالت استفاده ( Y ). حالت ( bInUse) یک حالت بدون استفاده ( N ) است. به طور همزمان، ساختار داده های جنبه مربوطه به روز می شود.
برای اطمینان از یکپارچگی داده های ثبت شده، اطلاعات مربوط به صفحه ترجمه باید بتواند به طور مستقیم یا غیرمستقیم سه جنبه از داده ها را منعکس کند:
-
مقدار مختصات راس از پیش پنهان N ( v j )، و شاخص راس از پیش پنهان.
-
پچ مثلثی p e , p f که به راس از پیش پنهان متصل است و شاخص های دو تکه مثلثی N(p e ) و N ( p f )؛
-
شاخص های ( N ( p a )، N ( p b )، N ( p c )……) سطح غیر مشخصه، که باید به روز شوند.
رکوردهای اطلاعاتی در فرآیند تغییر چهره به صورت زیر تعریف می شوند:
R = {vj، ن(vj) ،په، ن(په) ،پf، ن(پf) ،ن(پآ) ، ن(پب) ، ن(پج) ⋯ } .آر={��،ن(��)،په،ن(په)،پ�،ن(پ�)،ن(پآ)،ن(پب)،ن(پج)⋯}.
فرآیند ساده سازی و بازیابی جزئیات مدل های ساختمان سه بعدی در واقع فرآیند تعریف وضعیت استفاده از داده ها ( bInUse ) در مکان های مشخص شده در ساختار داده است، در حالی که N(v j ) ، N(p e ) و N ( p) و ) نقش «تخصیص مکان» را ایفا کند، که کلید اطمینان از فرآیند دقیق سادهسازی و بازیابی جزئیات کل مدل است.
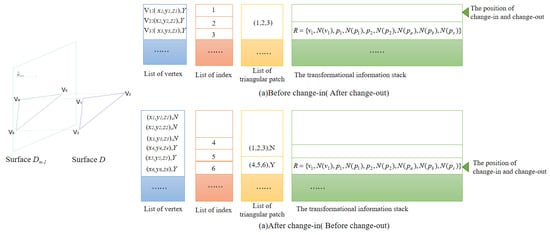
محتوایی که در فرآیند تغییر چهره ثبت می شود را می توان به دو بخش تقسیم کرد: داده های راس و اطلاعات توپولوژیکی. دادههای راس اطلاعات نقاط از پیش پنهان را نشان میدهند و اطلاعات توپولوژیکی اطلاعات پچ مشخصه اضافی و بهروز شده را پس از تغییر جنبه، که هر دو توسط پشته باقی میمانند، منعکس میکنند. در فرآیند تبدیل مدل LOD پیوسته، اولین سطح ویژگی ترجمه شده در آخرین نقطه بازیابی می شود و آخرین سطح ویژگی ترجمه شده در اولین نقطه بازیابی می شود. با در نظر گرفتن توالی بازیابی سطح مشخصه در فرآیند تبدیل مدل LOD پیوسته، پشتهای که میتواند پیامها را در یک دنباله اول ورودی، اول خروجی (FIFO) پردازش کند برای ذخیره اطلاعات تبدیل استفاده میشود.شکل 6 نمودار عملیات ورودی-خروجی پشته اطلاعات تبدیلی است.
هنگام تغییر، نشانگر موقعیت پشته به سمت پایین حرکت می کند، رکورد اطلاعات تغییر به بیرون رانده می شود، رئوس اضافی به لیست راس اضافه می شود و شاخص ها و سطوح مربوطه نیز در لیست خود به روز می شوند. هنگامی که مدل ساختمان سه بعدی اصلاح و تغییر می کند، نشانگر موقعیت به سمت بالا حرکت می کند، رکورد اطلاعات تغییر فشار داده می شود، و حالت استفاده از رئوس اضافی در لیست راس ( bInUse ) به حالت عدم استفاده ( N ) تبدیل می شود. علاوه بر این، حالت استفاده ( bInUse ) شاخص های مربوطه و سطوح به حالت عدم استفاده ( N ) تغییر می کند.) و مدل ساختمان سه بعدی را می توان ساده کرد. به بیان ساده، با عملیات تغییر و خروج در پشته اطلاعات تحولی، مدلهایی در هر LOD قابل دستیابی است.
3. روش تبدیل پیوسته LOD برای مدل های ساختمانی سه بعدی
تبدیل LOD مدل های ساختمان سه بعدی شامل دو فرآیند است: ساده سازی و بازسازی. هر یک روند معکوس دیگری است. با در نظر گرفتن فرآیند ساده سازی به عنوان مثال، این شامل ساده سازی دیوار، سقف و زائده خارجی است. با توجه به اینکه ویژگیهای اطلاعاتی سازههای ساختمانهای سه بعدی معمولی شهری عمدتاً در دیوارها و سقفها منعکس میشوند، این کار بر روی پردازش دیوارها و سقفها متمرکز شده است.
ساده سازی سازه های دیوار مقعر-محدب، مقایسه دو سطح یک دیوار است. موقعیت نسبی دو سطح مشخصه با مقایسه فاصله دو سطح مشخصه تا مرکز مدل تعیین می شود. جهت انتقال هواپیما بر اساس نسبت دو صفحه مشخصه قضاوت می شود تا دیوار ساده شود. همه این فرآیندهای ساده سازی و بازیابی عمدتاً از الگوریتم تغییر چهره استفاده می کنند که بر اساس حداقل ویژگی ها است. ساده سازی سقف ابتدا سطح دیوار را با دانش قبلی شناسایی می کند (زمین عمودی دیوار)، سطح سقف را با زاویه با صفحه دیوار شناسایی می کند، سطح سقف را با دو مقایسه می کند و جهت انتقال صفحه را با مساحت دو مشخصه قضاوت می کند. صفحات، به طوری که سطح دیوار را ساده می کند.شکل 7 .
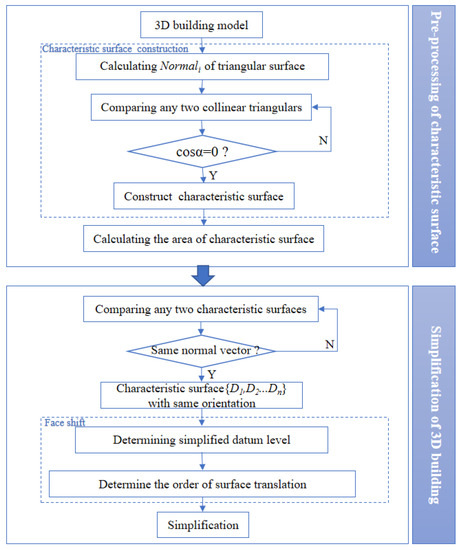
3.1. پیش تصفیه سطح مشخصه
مدل سه بعدی از وجوه مثلثی تشکیل شده است ( شکل 8 )، در حالی که تبدیل LOD مدل ساختمان سه بعدی بر کل سطح صفحه است. قبل از تبدیل LOD مدل ساختمان سه بعدی، اگر بردار معمولی وجوه مثلثی یکسان باشد و یک نقطه خطی مشترک داشته باشد، وجوه مثلثی در همان صفحه باید ادغام شوند. سپس سطح مشخصه ساخته می شود. مقدار مهم هر سطح مشخصه را می توان با افزودن مساحت وجوه مثلثی از همان سطح به دست آورد. سطح کم اهمیت همیشه باید ویژگی های سایت خود را رها کند و ویژگی های سایت را از سطوح با سطح اهمیت بالاتر به ارث ببرد. مراحل به شرح زیر است:
-
محاسبه بردارهای نرمال:
نیا من _ _لمن= (Vمن 2–Vمن 1) × (Vمن 3–Vمن 1) .ن��مترآلمن=(�من2-�من1)×(�من3-�من1). -
تعیین مثلث های همسطح:
cos α =نیا من _ _لمن× Nیا من _ _لj| نیا من _ _لمن× Nیا من _ _لj|.cos�=ن��مترآلمن×ن��مترآل�|ن��مترآلمن×ن��مترآل�|.اگر cosα = 0، دو مثلث همسطح هستند. -
محاسبه مساحت هر سطح مشخصه برای تعیین جهت حرکت (مساحت کل مثلث همسطح):
اسΔ=p × ( p − a ) × ( p − b ) × ( p − c )————————√اسΔ=پ×(پ-آ)×(پ-ب)×(پ-ج)p =a + b + c2پ=آ+ب+ج2اسs u r f a c e=∑ni = 1اسΔ i.اسسطح=∑من=1�اسΔمن.
3.2. ساده سازی مدل ساختمان سه بعدی
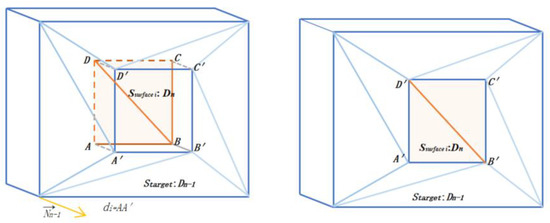
در اینجا، مدل ساختمان سه بعدی عمدتاً از الگوریتم تغییر وجه بر اساس حداقل ویژگی ها استفاده می کند و تغییرات داده های هندسی را در فرآیند میانی تبدیل LOD با ساختار داده توپولوژیکی پیوسته LOD ثبت می کند. با ذخیره داده های نقطه هندسی و اطلاعات داده لبه تولید شده در فرآیند ساده سازی سطح مبنا از سطح بیرونی Dn ، سپس وضعیت استفاده از داده های هندسی تولید شده را می توان در مراحل مختلف تغییر داد، سطوح مشخصه را می توان در سطوح مختلف بازیابی کرد. و در نهایت، جزئیات مراحل مختلف را میتوان بدون آمادهسازی مدلهای هر سطح LOD از قبل بازیابی کرد، بنابراین تبدیل پیوسته LOD مدل ساختمان سه بعدی را درک کرد. مراحل تغییر چهره به شرح زیر است ( شکل 9):
-
هدف S ▲ max را تأیید کنید .
-
فاصله d i از نقطه مرکزی سطح S تا سطح مبنا را محاسبه کنید و صفحات ( D 1 < D 2 < …… D n ) را بر اساس فاصله، از کوچک به بزرگ مرتب کنید.
-
برای هر مرحله ساده سازی، تنها خارجی ترین صفحه Dn به زیر خارجی ترین لایه Dn- 1 ساده می شود .
-
تا زمانی که به هدف S ساده شود .
در فرآیند ترجمه صفحه، فرآیند سازماندهی داده های هندسی به شرح زیر است:
-
پشته نقطه ای ST V و پشته جانبی ST E را به ترتیب برای ذخیره نقاط و لبه های ایجاد شده جدید تنظیم کنید.
-
رئوس جدید A’، B’، C’ و D’ مقادیر مختصات خود را به عنوان مقادیر پیش بینی شده ای تنظیم می کنند که راس های A، B، C و D در امتداد بردار عادی به سطح D n -1 نشان می دهند.
-
لبه های جدید A’B’, A’D’, B’C’ و D’C’ و حالت پیش فرض bInUse = N را تنظیم کنید.
-
با جایگزین کردن لبههای AB، AD، BC، و DC، مرحله استفاده از سطح D n را بهروزرسانی کنید (تنظیم لبههای AB، AD، BC، و DC به عنوان حالت بدون استفاده و A’B’، A’D’، B’C’، و D′C به عنوان حالت استفاده). سپس سطح D n به سطح D n -1 ساده می شود .
3.3. روش تبدیل عمومی در مقایسه با روش تغییر ساختار داده بهبود یافته
شکل 10 اصول عملیات تبدیل بین روش تبدیل مدل عمومی و روش تبدیل مدل پیشنهادی را به صورت انتزاعی مقایسه میکند.
در مورد روش کلی، در حالت اولیه (جزئیات مدل کمتر از حد انتظار بود)، مدل های LOD0 و LOD1 بارگذاری شدند، شفافیت مدل LOD1 برابر 0 و شفافیت مدل LOD1 به صورت تنظیم شد. 1. در این مرحله، مدل LOD1 در واقع بارگذاری شد، جایی که “نامرئی” بود. از حالت اولیه تا مرحله I (جزئیات مدل بیش از حد انتظار بود) شفافیت مدل LOD1 از 0 به 1 تغییر کرد، در حالی که شفافیت مدل LOD0 از 1 به 1 تغییر یافت. 0، با محو شدن مدل LOD0 و افزایش مدل LOD1، به طوری که تبدیل از حالت اولیه به مرحله I می تواند انجام شود.
در مورد روش پیشنهادی، در حالت اولیه، مدلهای LOD0 تنها مدلهای بارگذاری شده بودند. از حالت اولیه تا مرحله I، تبدیل از LOD0 به LOD1 در زمان واقعی بود و بخش افزایش یافته، افزایش جزئیات و راس و وصله های مربوطه بود.
در بالا، بخشی از فرآیند کاهش مدل از طریق دو روش معرفی شد و بقیه بخش و فرآیند سادهسازی نیز میتوانند به همین ترتیب انجام شوند.
4. آزمایش ها و تجزیه و تحلیل
در این مطالعه از یک مدل ساختمان سه بعدی با ساختار داده 3DS استفاده شد. دو ساختمان در مدل وجود داشت. داده های تجربی دارای ویژگی های ساختار موازی آشکار در فرم هندسی بودند. در پلتفرم ویژوال استودیو 2012، از زبان C++ برای خواندن اطلاعات نقطه و سطح مدل سه بعدی استفاده شد. سپس از OpenGL برای پردازش مدل و نمایش مدل سه بعدی استفاده شد.
نتایج آزمون الگوریتم در شکل 11 نشان داده شده است. در این آزمایش 4991123 تکه مثلثی و 39703 نقطه داده پردازش شد. در فرآیند تست، سخت افزار مربوطه یک پردازنده Intel Core i5-8250U و حافظه DDR4 240008 گیگابایتی بود. نتایج آزمون نشان داد که مدل ساختمان سه بعدی بر اساس ساختار داده در این مقاله به خوبی در تبدیل LOD پیوسته عمل می کند. در فرآیند تبدیل، لبههای بین مثلثهای انواع مختلف سازهها (عمدتاً دیوارها و سقفها) خوب بود، تصویر صاف بود و دادههای مصرفشده توسط سیستم در طول اجرای مدل آزمایشی 22.68 M حافظه را اشغال کردند. شکل 11نشان می دهد که در فرآیند تبدیل، سیستم 22.68 M حافظه مصرف کرده است. تحت شرط تنظیم چهار سطح از جزئیات، نتایج تجسم هر سطح از جزئیات در فرآیند مدل ساختمان سه بعدی از حالت اولیه به مرحله III تغییر کرد.
این مدل دارای ویژگی های معماری دقیق مانند قاب پنجره در حالت اولیه بود. در فرآیند ساده سازی بر اساس ساختار داده در این مقاله، سطح بیرونی ترین ساختار موازی به صفحه داخلی پیش بینی شد تا سطح متناظر بیرونی ترین ساختار موازی در حالت ساده شده به دست آید. در همان زمان، بیرونی ترین ساختار موازی ثبت شد و bInUse به N تغییر یافت ، که مدل را ساده کرد و اطلاعاتی برای بازگرداندن آن به حالت اولیه داشت. به این ترتیب، جزئیات مدل به تدریج حذف شد تا اینکه مدل به مرحله III ساده شد (در این مرحله، مدل را نمی توان بیشتر ساده کرد).
جدول 1 کارایی تبدیل مدل سه بعدی را در هنگام استفاده از روش پیشنهادی در شرایط تجربی نشان می دهد (خطای زمان بر 0.01 ثانیه بود).
شکل 12 واریانس کارایی بین روش تبدیل پیوسته محو شدن مدل ساختمان سه بعدی کلی و این روش را مقایسه می کند. شاخص های ارزیابی عبارتند از (1) مصرف حافظه و (2) زمان تبدیل هنگام بارگذاری و تبدیل. مقادیر شاخص با مقایسه حافظه پنهان و پردازش پس زمینه تحت فرض مرحله رندر سازگار به دست آمد. روش تبدیل کلی نیاز به تولید مدل های ساختمانی سه بعدی LOD متعدد دارد، در حالی که روش در این مقاله در فرآیند ساده سازی همگام می شود. مقادیر میانی متغیر که مستقیماً در فرآیند کاهش استفاده می شدند، محاسبه و ثبت شدند. همانطور که از شکل 12 مشاهده می شود، روش کلی وجوه بیشتری را بارگذاری کرد و به فضای حافظه بیشتری در فرآیند تبدیل نیاز داشت. هرچه مدل بارگذاری پیچیدهتر باشد، جنبههای بیشتری باید در فرآیند تبدیل پردازش شوند، و هر چه فرآیند تبدیل طولانیتر شود، احتمال روان نبودن تصاویر بیشتر میشود.
5. نتیجه گیری ها
در این کار، ساختار داده ای از تبدیل پیوسته LOD ساختمان های سازه موازی طراحی شد. با محاسبه و ذخیره اطلاعات فرآیند سطوح ویژگی و نقاط در فرآیند تبدیل مدل، تبدیل پیوسته LOD یک مدل ساختمان سه بعدی با استفاده از اطلاعات فرآیند محقق شد. در فرآیند تبدیل LOD، اطلاعات فرآیند ترجمه صفحه ضبط تنظیم شد و موقعیت هر مرحله از تبدیل LOD با تنظیم وضعیت سطح “جدید” تولید شده توسط همان صفحه در مراحل مختلف تعیین شد. ، بنابراین بر جزئیات مدل تأثیر می گذارد. از اثر تبدیل کلی، ساختار داده پیشنهاد شده در این مقاله میتواند نیازهای تبدیل صاف برای مدلهای ساختمان سه بعدی در LODهای مختلف را بهتر برآورده کند. در مقایسه با تبدیل LOD گسسته، که نیاز به تولید و ذخیره بسیاری از مدلهای سادهشده از قبل دارد، ساختار دادهای پیشنهاد شده در این مقاله تنها یک بار در فرآیند تبدیل LOD همه راسها را در حافظه ذخیره میکند. هنگامی که LOD گسسته چندین مدل ساده شده را ذخیره می کند، فضای ذخیره کمتری را اشغال می کند، و می تواند فشار ذخیره سازی رایانه را بهتر کاهش دهد، کمبود ذخیره سازی مکرر برخی از رئوس را برطرف می کند. با این حال، مدل های ساختمان سه بعدی تولید شده از طریق این روش در بسیاری از کاربردها محدود هستند. مدلهای سادهشده ممکن است باعث خطاهای محاسباتی در برخی زمینههای کاربردی مانند تحلیل مساحت ساختمان شوند، و به دلیل در نظر گرفتن محدودیتهای توپولوژی، زمانی که طرح LOD پیوسته اتخاذ میشود، راندمان اجرای بلادرنگ روش ممکن است کمی کندتر باشد. اگرچه پیچیدگی ساختمان های شهری سه بعدی واقعی در نظر گرفته شده است، اما هنوز به اندازه کافی جامع نیست. برخورد منطقی با اطلاعات ساختار پیچیده در تبدیل LOD بدون تأثیرگذاری بر جلوه بصری یک جهت تحقیقاتی آینده خواهد بود.
منابع
- وانگ، جی. لی، سی. Xiong، Z. Shan, Z. بررسی شهر هوشمند داده محور. جی. کامپیوتر. Res. توسعه دهنده 2014 ، 51 ، 239-259. [ Google Scholar ]
- درن، ال. یوان، ی. شائو، زی. داده های بزرگ در شهر هوشمند. Geomat. Inf. علمی دانشگاه ووهان 2014 ، 39 ، 631-640. [ Google Scholar ]
- زو، س. لین، اچ. سیستم اطلاعات جغرافیایی شهر دیجیتال: مطالعه مقدماتی شهری سه بعدی. مدل. در محیط شهر مجازی ; انتشارات دانشگاه ووهان: ووهان، چین، 2004. [ Google Scholar ]
- ژو، ی. زو، س. Huang, Z. LOD ساختمانهای پیچیده برای 3DCM. علمی Surv. نقشه 2006 ، 31 ، 74-77. [ Google Scholar ]
- تان، آر. لی، سی. Wang, H. استقرار و کاربرد در تحلیل نویز 3DCM. علمی Surv. نقشه 2006 ، 31 ، 8-104. [ Google Scholar ]
- Li, M. کاربرد مدل سه بعدی صحنه واقعی مورد استفاده در برنامه ریزی و مدیریت شهری. Geomat. تف کردن Inf. تکنولوژی 2018 ، 41 ، 126-131. [ Google Scholar ]
- شیانگ، ز. Zhang, C. مطالعه بر روی مونومر مدلسازی سه بعدی عکاسی مایل و کاربرد شهر هوشمند. Geomat. تف کردن Inf. تکنولوژی 2018 ، 41 ، 191-201. [ Google Scholar ]
- رن، سی. هوو، دبلیو. ژانگ، کیو. کاوش زیرساخت اطلاعات زمانی فضایی شهر هوشمند جدید بر اساس فناوری تصویر سه بعدی فوتورئالیستی پانوراما. Geomat. جهان 2017 ، 24 ، 8 تا 13. [ Google Scholar ]
- ژو، اف. هوانگ، ام. تانگ، ب. شبیه سازی و تحلیل غرقابی طوفان شهری بر اساس GIS سه بعدی. علمی Surv. نقشه 2017 ، 42 ، 53-58. [ Google Scholar ]
- زی، جی. ژانگ، ال. لی، جی. وانگ، اچ. یانگ، ال. ساده سازی و تجسم خودکار مدل های ساختمان های شهری سه بعدی. بین المللی J. Appl. زمین Obs. Geoinf. 2012 ، 18 ، 222-231. [ Google Scholar ] [ CrossRef ]
- مدلهای هندسی سلسله مراتبی کلارک، JH برای الگوریتمهای سطح مرئی. محاسبات ACM SIGGRAPH. نمودار. 1976 ، 19 ، 547-554. [ Google Scholar ] [ CrossRef ]
- زو، س. گونگ، جی. Du، ZQ; Zhang، YT LODs شرح مدل شهر سه بعدی. Geomat. Inf. علمی دانشگاه ووهان 2005 ، 30 ، 965-969. [ Google Scholar ]
- کم، KL; سادهسازی مدل Tan، TS با استفاده از خوشهبندی ertex. در مجموعه مقالات سمپوزیوم 1997 در زمینه گرافیک سه بعدی تعاملی، پراویدنس، RI، ایالات متحده آمریکا، 27-30 آوریل 1997; صص 75-82. [ Google Scholar ]
- گونگ، جی. ژانگ، اچ. روشی برای تولید LOD مدل شهر سه بعدی بر اساس شاخص درخت R 3 بعدی توسعه یافته. در مجموعه مقالات هشتمین کنفرانس بین المللی سیستم های فازی و کشف دانش، شانگهای، چین، 26 تا 28 ژوئیه 2011. [ Google Scholar ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. مشخصات LOD بهبود یافته برای مدل های ساختمان سه بعدی. محاسبه کنید. محیط زیست سیستم شهری 2016 ، 59 ، 25-37. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- راو، جی. چن، ال سی; تسای، اف. Hsiao، KH; Hsu، WC LOD Generation برای مدل سه بعدی ساختمان چند وجهی. در مجموعه مقالات کنفرانس حاشیه اقیانوس آرام درباره پیشرفتها در فناوری تصویر و ویدیو، PSIVT، Hsinchu، تایوان، 10–13 دسامبر 2006. [ Google Scholar ]
- Ng، KW; ساده سازی کم، ZW شبکه سه بعدی مثلثی برای سطح محاسبه جزئیات. در مجموعه مقالات یازدهمین کنفرانس بین المللی 2014 در زمینه گرافیک کامپیوتری، تصویربرداری و تجسم (CGIV)، سنگاپور، 6 تا 8 اوت 2014. [ Google Scholar ]
- ییقین، ال. مائو، پی. Xukun، Y. پیادهسازی الگوریتمها برای سادهسازی مشهای مثلثی برای مدلهای عظیم سه بعدی علوم زمین. Acta Sci. نات. دانشگاه پکین. 2013 ، 196 ، 1023-1031. [ Google Scholar ]
- بارسانتی، اس جی; Guidi، G. یک گردش کار پردازش هندسی برای تبدیل مدل های سه بعدی مبتنی بر واقعیت در مش های حجمی مناسب برای Fea. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 42 ، 331-338. [ Google Scholar ] [ CrossRef ]
- ژانگ، ایکس. بائو، جی. منگ، دبلیو. جیگر، م. لی، اچ. دوسن، او. Chen، B. مدلهای جزییات شاخه درخت برای ناوبری جنگل[J]. انجمن گرافیک کامپیوتری 2017 ، 36 ، 402–417. [ Google Scholar ] [ CrossRef ]
- نیش، ZQ; هو، جنرال موتورز; دو، ج. ژیان، بی. Xia, R. روشی برای نمایش مرزهای ساختاری با معادلات ریاضی و مش های مثلثی در شبیه سازی DEM. بین المللی J. Numer. مهندسی روش ها 2017 ، 111 ، 218-246. [ Google Scholar ] [ CrossRef ]
- فوربرگ، الف. تعمیم داده های ساختمان سه بعدی بر اساس رویکرد مقیاس-فضا. ISPRS J. Photogramm. Remote Sens. 2007 ، 62 ، 104-111. [ Google Scholar ] [ CrossRef ]
- بایگ، SU; Rahman, AA یک استراتژی سه مرحله ای برای تعمیم مدل های ساختمان سه بعدی بر اساس مشخصات CityGML. Geojournal 2013 ، 78 ، 1013-1020. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Ge، L. وو، اف. لی، جی. Ma، Z. رویکرد تحلیل ویژگی در ساده سازی ساختمان سه بعدی با سقف تخت پیچیده. Acta Sci. نات. دانشگاه پکین. 2017 ، 53 ، 1-7. [ Google Scholar ]
- لی، ی. هو، کیو. وو، ام. لیو، جی. Wu, X. استخراج و ساده سازی قطعات نمای ساختمان از ابرهای نقطه اسکنر لیزری سیار برای خدمات نمای خیابان سه بعدی. ISPRS Int. J. Geo Inf. 2016 ، 5 ، 231. [ Google Scholar ] [ CrossRef ]
- فن، اچ. Meng, L. یک رویکرد سه مرحله ای برای ساده سازی ساختمان های سه بعدی مدل سازی شده توسط CityGML. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1091-1107. [ Google Scholar ] [ CrossRef ]
- زی، جی. Feng, CC یک رویکرد ساده سازی یکپارچه برای ساختمان های سه بعدی با سقف های شیبدار و مسطح. ISPRS Int. J. Geo Inf. 2016 ، 5 ، 128. [ Google Scholar ] [ CrossRef ]
- گیگل، م. Wimmer, M. Unpopping: حل مسئله ترکیب تصویر-فضا برای انتقالهای LOD گسسته صاف . John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2007. [ Google Scholar ]
- بیلجکی، اف. ژائو، جی. استوتر، جی. لدوکس، اچ. بازبینی مفهوم سطح جزئیات در مدلسازی سه بعدی شهر. حسگر از راه دور اسپات. Inf. علمی 2013 ، 63-74. [ Google Scholar ] [ CrossRef ]
- Ge, L. مطالعه در محاسبات ساده سازی ساختمان سه بعدی. پایان نامه کارشناسی ارشد، دانشگاه مهندسی اطلاعات PLA، ژنگژو، چین، 2007. [ Google Scholar ]
- Hearn، DD Computer Graphics with OpenGL ; انتشارات خانه صنعت الکترونیک: پکن، چین، 2004. [ Google Scholar ]
- Ge، L. وو، اف. کیان، اچ. Wang, Z. الگوریتم تغییر وجه بر اساس ویژگی حداقل در ساده سازی ساختمان موازی. جی. ژئومات. علمی تکنولوژی 2009 ، 26 ، 103-105. [ Google Scholar ]

شکل 1. انواع دیوار ساختمان های معمولی شهری (به صورت سه بعدی): ( الف ) دیوارهای مسطح، ( ب ) دیوارهایی با قسمت های ناهموار در یک طرف، و ( ج ) دیوارهایی با قسمت های ناهموار در دو طرف.

شکل 2. انواع سقف ساختمان های معمولی شهری: ( الف ) مسطح، ( ب ) گلدسته، و ( ج ) سقف های شیبدار.

شکل 3. نمایش اشاره گر جدول راس.

شکل 4. ساده سازی صفحه جزئیات بر اساس الگوریتم تغییر وجه.
شکل 5. ساختار داده توپولوژیکی پیوسته سطح از جزئیات (LOD).
شکل 6. عملیات تغییر و خروج در یک پشته اطلاعات تبدیلی.
شکل 7. فلوچارت ساده سازی پیوسته برای مدل های ساختمان سه بعدی.

شکل 8. ساخت سطح مثلثی مدل سه بعدی.
شکل 9. تبدیل مدل بر اساس ساختار داده توپولوژیکی پیوسته LOD.

شکل 10. روش تبدیل کلی در مقایسه با روش مبتنی بر ساختار داده توپولوژیکی LOD پیوسته.

شکل 11. تبدیل پیوسته LOD مدل های سه بعدی شهری (قسمت).
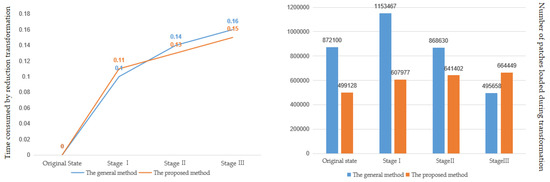
شکل 12. مقایسه بین روش عمومی و روش پیشنهادی


بدون دیدگاه