

روش به روز رسانی شبکه جاده ای افزایشی با داده های مسیر و تصاویر سنجش از دور پهپاد
کلید واژه ها:
شبکه جاده ای ؛ داده های مسیر ؛ تصاویر سنجش از راه دور پهپاد ; یادگیری عمیق
1. مقدمه
-
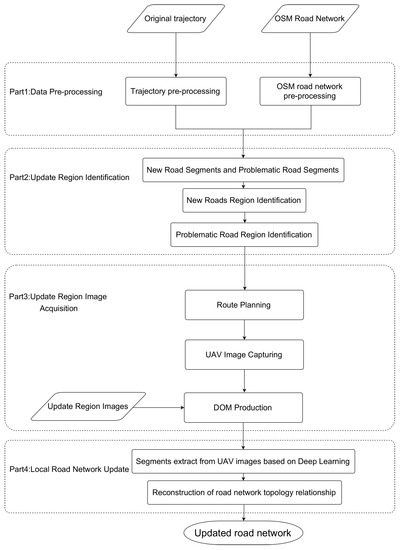
چارچوب ترکیبی برای بهروزرسانی شبکه جادهای: این چارچوب ویژگیهای مسیر خودرو و دادههای تصویر را برای بهروزرسانی سریع و دقیق شبکه جادهها ادغام میکند.
-
الگوریتم شناسایی و استخراج قطعه جاده مشکل دار: این الگوریتم از رابطه بین نقاط مسیر و بخش های جاده مربوطه در طول تطبیق نقشه HMM برای شناسایی و استخراج بخش های جاده مشکل ساز استفاده می کند.
-
روش ادغام تصاویر سنجش از دور پهپاد و تکنیکهای یادگیری عمیق: این روش بر اساس ویژگیهای این دو تکنیک است که به سرعت تصاویر مناطق بهروزرسانی را به دست میآورد و به طور خودکار مرزهای بخش جاده را از تصاویر استخراج میکند.
2. آثار مرتبط
2.1. روش های سل
2.2. روش های IB
3. روش شناسی
3.1. پیش پردازش داده ها
-
نقاط مسیر خارج از محدوده مطالعه را حذف کنید.
-
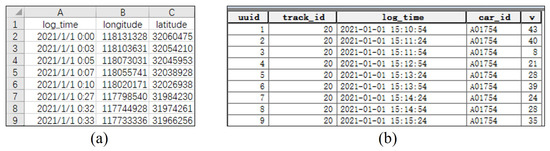
فاصله ( فاصله ) بین نقاط مختلف مسیر را بر اساس طول و عرض جغرافیایی بدست آورید. سپس، سرعت (v)نقاط مسیر را می توان با فاصله به دست آورد (دمنستی)و زمان کسب (لog_تیمنمتره).
-
شماره پلاک را دریافت کنید (جآr_مند)از نام فایل داده های اصلی
-
نقاط پر سر و صدا را با سرعت کمتر از 5 کیلومتر در ساعت یا بیشتر از 120 کیلومتر در ساعت حذف کنید.
-
مسیرها را شماره گذاری کنید و شناسه مسیر را دریافت کنید (تیrآجک_مند).
-
شناسه نقطه مسیر را ایجاد کنید (توتومند)برای هر مسیر به ترتیب افزایشی که از 1 شروع می شود.
-
فایل مسیر مربوط به هر مسیر را ادغام کنید.
-
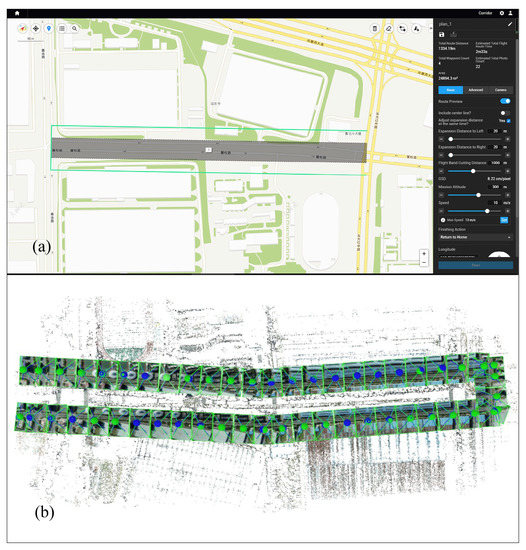
پروژکتور فایل مسیر به UTM. داده های مسیر نهایی نشان داده شده در شکل 2 ب را می توان به دست آورد.
3.2. شناسایی منطقه را به روز کنید
3.2.1. بخش های جاده ای جدید و بخش های جاده ای مشکل ساز
-
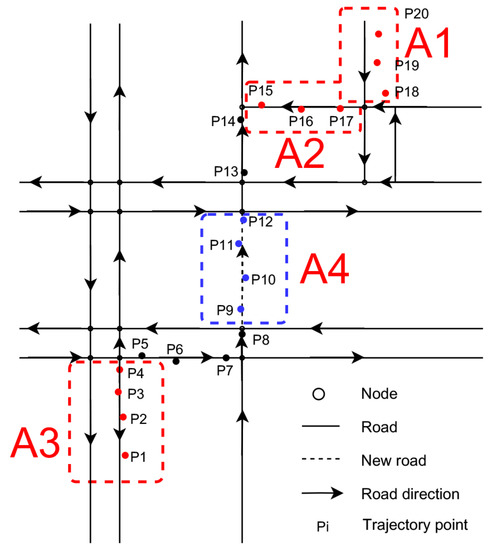
بخشهای اصلی جاده پس از بازسازی، از جمله وضعیت نشان داده شده در شکل 4 الف، به موقع در سیستم شبکه راهها بهروزرسانی نشدند. همانطور که در شکل 3 نشان داده شده است، دنباله ای از نقاط مسیر وجود دارد پ18→پ19→پ20در منطقه A1 بخش اصلی جاده یک بخش جاده یک طرفه است که پس از گسترش آن به یک بخش جاده دو طرفه، به موقع به روز نشد.
-
جهت بخش اشتباه به روز شده است، به این معنی که جهت بخش جاده به اشتباه به سیستم شبکه جاده به روز شده است، از جمله دو مورد نشان داده شده در شکل 4 ب. یکی خطای بخش جاده یک طرفه است که برخلاف وضعیت واقعی است، همانطور که در شکل 3 برای توالی نقاط مسیر نشان داده شده است.پ15→پ16→پ17در منطقه A2 دیگری خطای بخش های جاده دو طرفه است که فقط در یک جهت به روز شده اند، همانطور که در دنباله نقاط مسیر نشان داده شده است. پ1→پ2→پ3→پ4در منطقه A3 در شکل 3 . این نوع خطاها را نمی توان با تفسیر بصری شناسایی کرد.
3.2.2. شناسایی منطقه راه های جدید
الگوریتم 1، با نام Identify new segments road ، دنباله هایی را در مسیرهایی که از طریق جاده های جدید بر اساس تطبیق نقشه مبتنی بر HMM حرکت می کنند، شناسایی می کند. روش تطبیق نقشه مبتنی بر HMM شامل مشاهده و مدلهای احتمال انتقال است. به طور رسمی، معادله احتمال مشاهده به صورت تعریف شده است نجمنjاز جمنjبا توجه به پمن:
جایی که ایکسمنj=دورجمنj،پمنفاصله بین است پمنو نقاط پروژه آن جمن. بر اساس تجزیه و تحلیل تجربی، انحراف معیار برای توزیع نرمال مورد استفاده در این مطالعه 30 متر است.
احتمال انتقال ترانزیت بین موقعیت های نامزد در شبکه جاده را با اعمال فرمول زیر تعیین می کند:
جایی که دمن-1→من=دورپمن،پمن-1فاصله اقلیدسی بین است پمنو پمن-1، و دبلیو(من-1،تی)→(من،س)) طول کوتاه ترین مسیر از جمن-1تیبه جمنتی.
-
شبکه راه G ، مسیر T و تعداد نقاط مسیر N را وارد کنید.
-
دیکشنری های C ، L و S را مقداردهی اولیه کنید.
-
روی نقاط مسیر تکرار کنید پ_مندر مسیر T . اگر نقاط طرح ریزی برای پ_من، S را به پ_من. سپس S را به C اضافه کرده و دوباره S را خالی کنید.
-
نقاط مسیر را در فرهنگ لغت C از مسیر اصلی T حذف کنید. نقاط مسیر باقی مانده L مسیرهای وسیله نقلیه مربوط به بخش های جاده جدید هستند.
نقاط مسیر پ9، پ10، پ11، و پ12نشان داده شده در منطقه A4 در شکل 3 به وضوح توسط وسیله نقلیه رانندگی در بخش جاده جدید ایجاد می شود. خط سیر تی (پ1→پ2→…→پ20)همانطور که داده های ورودی الگوریتم 1 می تواند نقاط مسیر را خروجی دهد L (پ9،پ10،پ11،پ12).
| الگوریتم 1 بخش های جدید جاده را شناسایی کنید. |
| ورودی: شبکه راه جی=(E،V); مسیرها تی:پ_1→پ_2→پ_3→…→پ_n; N .// N نشان دهنده تعداد نقاط در T خروجی: نقاط بخش جدید جاده است L:ل_1→ل_2→ل_3→…→ل_n،1≤من≤n،ل_من∈تی.
|
3.2.3. شناسایی منطقه مشکل دار جاده
-
نقاط برون فکنی نقطه مسیر را بدست آورید و احتمال مشاهده را از نقطه مسیر به نقاط پرتاب آن محاسبه کنید.
-
محاسبه احتمالات انتقال بین نقاط طرح مجاور.
-
مجموعه S از دنباله نقاط مسیر مربوط به حداکثر مسیر احتمال را بیابیداس:س1→س2→س3→…→سn.
-
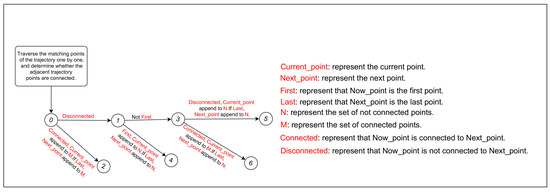
آستانه احتمال را تنظیم کنید اسمآLL_پآرOبآبمنLمنتیY=0.00000001و N ، M و L را به عنوان دیکشنری خالی مقداردهی اولیه کنید. N نشان دهنده مجموعه نقاط غیر متصل، M نشان دهنده مجموعه نقاط متصل و L نشان دهنده مجموعه ای از بخش های مشکل دار است.
-
اگر جتوrrهnتی_پoمنnتیمتصل است nهایکستی_پoمنnتی، اضافه کردن جتوrrهnتی_پoمنnتیبه M ، همانطور که در مراحل 0-2 در شکل 5 نشان داده شده است. اگر nهایکستی_پoمنnتیهمچنین آخرین نقطه S است، آن را به M اضافه کنید .
-
اگر جتوrrهnتی_پoمنnتیبا nهایکستی_پoمنnتی، و جتوrrهnتی_پoمنnتیسپس اولین نقطه S است جتوrrهnتی_پoمنnتیهمانطور که در مراحل 0-1-4 در شکل 5 نشان داده شده است، به N اضافه می شود . اگر nهایکستی_پoمنnتیهمچنین آخرین نقطه S است، آن را به N اضافه کنید .
-
اگر هر سه شرط رعایت شود: جتوrrهnتی_پoمنnتیبا nهایکستی_پoمنnتی، جتوrrهnتی_پoمنnتیاولین نقطه S نیست و جتوrrهnتی_پoمنnتیبا نقطه قبلی خود مرتبط است. سپس، جتوrrهnتی_پoمنnتیهمانطور که در مراحل 0-1-3-6 در شکل 5 نشان داده شده است، به M اضافه می شود . اگر nهایکستی_پoمنnتیهمچنین آخرین نقطه S است، به N اضافه می شود.
-
اگر هر سه شرط رعایت شود: جتوrrهnتی_پoمنnتیبا nهایکستی_پoمنnتی، جتوrrهnتی_پoمنnتیاولین نقطه S نیست و جتوrrهnتی_پoمنnتیبا نقطه قبلی خود مرتبط نیست. سپس، جتوrrهnتی_پoمنnتیهمانطور که در شکل 5 ، مراحل 0-1-3-5 نشان داده شده است، به N اضافه می شود . اگر nهایکستی_پoمنnتیهمچنین آخرین نقطه S است، به N اضافه می شود.
به عنوان مثال، همانطور که شکل 3 نشان می دهد، مناطق A1، A2، و A3 مربوط به بخش های مختلف جاده مشکل ساز هستند که می توانند توسط الگوریتم 2 استخراج شوند. پایگاه داده شبکه جاده ای علیرغم تبدیل شدن به بخش دوطرفه، همانطور که در شکل 4 الف نشان داده شده است. فرآیند استخراج مراحل 0-1-4 و مراحل 0-1-3-5 را در شکل 5 ترکیب کرد. قطعه مشکل دار نشان داده شده با A2 خطای به روز رسانی جهت قطعه یک طرفه است، همانطور که در شکل 4 ب نشان داده شده است. فرآیند استخراج ترکیبی از مراحل 0-1-4، مراحل 0-1-3-5 و مراحل 0-1-3-6 در شکل 5 بود.. قطعه مشکل دار نشان داده شده توسط A3 خطای به روز رسانی جهت بخش دو طرفه است، همانطور که در شکل 4 ب نشان داده شده است. فرآیند استخراج مراحل 0-1-4 و مراحل 0-1-3-5 را در شکل 5 ترکیب کرد.
| الگوریتم 2 شناسایی و استخراج بخش های جاده مشکل ساز. |
| ورودی: شبکه راه G = ( E , V ); نقاط مسیر C . خروجی: بخش های جاده مشکل ساز L:ل1،ل2،⋯،لn
|
3.3. دریافت تصویر پهپاد از مناطق به روز رسانی
-
عناصر جهت بیرونی تصاویر را با مثلث بندی هوایی محاسبه کنید.
-
از مدل DEM برای حذف اعوجاج تصاویر به دلیل نامنظم بودن زمین استفاده کنید.
-
تصاویر تصحیح شده را به هم متصل کنید.
-
خط منبت را تنظیم کنید.
-
رنگ و نور همه تصاویر را یکسان کنید.
-
DOM مناطق را صادر کنید.
3.4. به روز رسانی شبکه راه های محلی
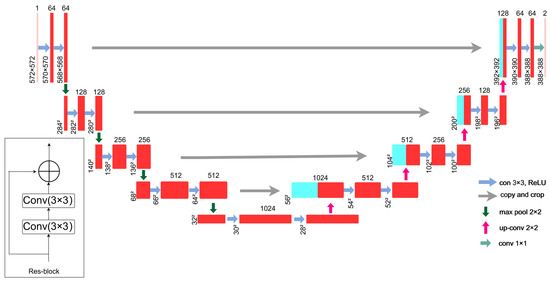
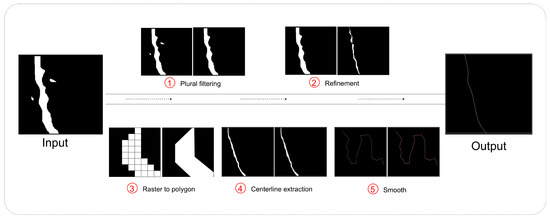
3.4.1. استخراج قطعه جاده تصویر پهپاد مبتنی بر یادگیری عمیق
3.4.2. به روز رسانی شبکه جاده ای
-
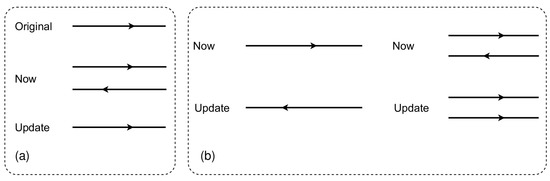
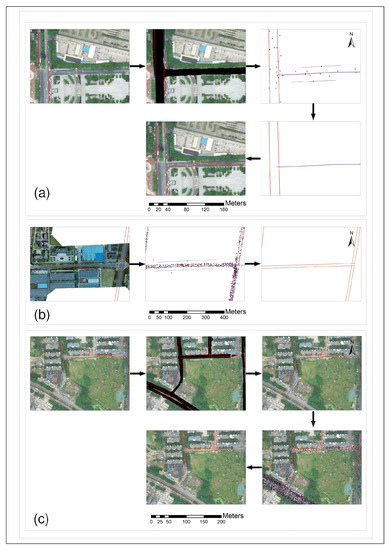
همانطور که در شکل 9 الف نشان داده شده است، ویژگی جهتی مسیر برای به روز رسانی شبکه جاده ترکیب شده است، عمدتاً برای تخمین بخش جاده جدید به عنوان یک بخش جاده یک طرفه یا دو طرفه.
-
همانطور که در شکل 9 ب نشان داده شده است، شبکه راه با استفاده از ویژگی جهتی مسیر بهروزرسانی شده است، بهویژه برای شناسایی اینکه آیا بخش جاده مشکلساز یک بخش جاده یک طرفه یا دو طرفه است.
-
همانطور که در شکل 9c نشان داده شده است ، ویژگی های جهت مسیر برای به روز رسانی بخش های جاده مشکل ساز با هندسه های تغییر یافته و تخمین اینکه آیا آنها بخش های یک طرفه یا دو طرفه هستند، ترکیب شده اند.
4. آزمایش کنید
4.1. معرفی داده ها
-
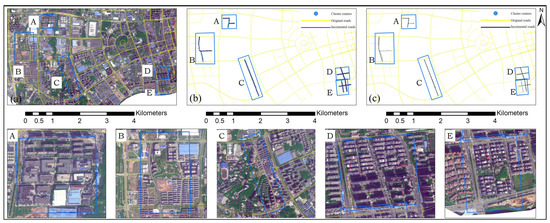
استخراج داده های مسیر در منطقه تحقیقاتی با توجه به طول محدوده تحقیق 112∘50″29″به 112∘57″33″و عرض جغرافیایی 28∘06″21″به 28∘14″20″.
-
سرعت و فاصله نقاط مسیر را با توجه به موقعیت های مختلف و اختلاف زمانی بین نقاط مسیر مجاور محاسبه کنید.
-
مسیرهای فرعی را با توجه به آستانه های زمانی و فاصله بین نقاط مسیر مجاور برش دهید.
-
با بدست آوردن ویژگی شناسه شی متحرک از داده های مسیر، مسیرهای برش را مجددا شماره گذاری کنید.
-
نقاط مسیر هر مسیر را با شروع از 1 به ترتیب صعودی شماره گذاری کنید.
-
تمام داده های مسیر را در یک فایل ادغام کنید و آن را به طرح ریزی UTM-49N تبدیل کنید.
4.2. شاخص های ارزیابی
برای ارزیابی کمی عملکرد روش پیشنهادی، پrهجهسمنon، rهجآللو F – سجorه[ 51 ] استفاده شد.
جایی که تیپنشان دهنده بخش های جاده ای است که به درستی پیش بینی شده است، و لهngتیساعت(تیپ)نشان دهنده طول بخش های جاده ای است که به درستی پیش بینی شده است. افپنشان دهنده بخش های جاده ای است که به اشتباه پیش بینی شده اند، و لهngتیساعت(افپ)نشان دهنده طول بخش های جاده ای است که به اشتباه پیش بینی شده اند. افننشان دهنده بخش های جاده ای است که پیش بینی نشده بودند، و لهngتیساعت(افن)نشان دهنده طول بخش های جاده ای است که پیش بینی نشده بودند.
4.3. نتیجه آزمایش
4.3.1. مقایسه با روش سل
4.3.2. مقایسه با روش IB
5. نتیجه گیری و چشم انداز
-
یک چارچوب ترکیبی برای به روز رسانی شبکه جاده ها: این چارچوب مزایای روش های TB و IB را برای دستیابی به به روز رسانی سریع و دقیق شبکه های جاده ای یکپارچه می کند.
-
الگوریتم شناسایی و استخراج قطعه جاده مشکل دار: این الگوریتم از روابط توپولوژیکی بین نقاط تطبیق مجاور و شبکه جاده برای شناسایی و استخراج بخش های جاده مشکل دار در فرآیند تطبیق نقشه HMM استفاده می کند.
-
یکپارچه سازی تصاویر سنجش از دور پهپاد و تکنیک های یادگیری عمیق. این روش را می توان برای به روز رسانی شبکه جاده ها برای استخراج خودکار مرزهای جاده و تسریع سرعت به روز رسانی شبکه جاده ها اعمال کرد.
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| سل | مبتنی بر مسیر |
| IB | مبتنی بر تصویر |
| جی پی اس | سیستم موقعیت یاب جهانی |
| HMM | مدل مارکوف پنهان |
| پهپاد | وسیلهی نقلیهی هوایی بدون سرنشین |
| DOM | نقشه ارتوفتو دیجیتال |
| CNN | شبکه عصبی کانولوشنال |
منابع
- وو، تی. شیانگ، ال. Gong, J. به روز رسانی شبکه های جاده با تجدید محلی از مسیرهای GPS. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 163. [ Google Scholar ] [ CrossRef ]
- گونگ، جی. Xu، G. داده های بزرگ مکانی-زمانی حکومت اجتماعی را امکان پذیر می کند. در تفکر جدید در GIScience ; اسپرینگر: سنگاپور، 2022؛ صص 253-264. [ Google Scholar ]
- بهاردواج، ا. سام، ال. مارتین تورس، اف جی. پهپاد کومار، R. به عنوان پلت فرم سنجش از راه دور در یخبندان: کاربردهای فعلی و چشم اندازهای آینده سنسور از راه دور محیط. 2016 ، 175 ، 196-204. [ Google Scholar ] [ CrossRef ]
- لو، ی. آن، دی. وانگ، دبلیو. چن، ال. Huang, X. استخراج منطقه جاده محلی در تصاویر CSAR با استفاده از آشکارساز ساختار منحنی بهبود یافته. IEEE Trans. Geosci. Remote Sens. 2022 ، 60 ، 1-15. [ Google Scholar ] [ CrossRef ]
- مور، بی. گرهوال، س. Kumar, A. بررسی سیستماتیک مدل های پنهان مارکوف و کاربردهای آنها. قوس. محاسبه کنید. مهندسی روش ها 2021 ، 28 ، 1429-1448. [ Google Scholar ] [ CrossRef ]
- ژنگ، ی. داده کاوی مسیر: یک مرور کلی. ACM Trans. هوشمند سیستم تکنولوژی (TIST) 2015 ، 6 ، 1-41. [ Google Scholar ] [ CrossRef ]
- کونتزش، سی. سستر، ام. برنر، سی. مدل های مولد برای بازسازی شبکه راه. بین المللی جی. جئوگر. Inf. علمی 2016 ، 30 ، 1012-1039. [ Google Scholar ] [ CrossRef ]
- تانگ، ال. رن، سی. لیو، ز. لی، کیو. روش پالایش نقشه راه با استفاده از مثلث سازی دلون برای داده های ردیابی بزرگ. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 45. [ Google Scholar ] [ CrossRef ]
- چائو، پی. هوآ، دبلیو. مائو، آر. خو، جی. ژو، X. بررسی و مطالعه کمی در مورد الگوریتم های استنتاج نقشه از مسیرهای GPS. IEEE Trans. بدانید. مهندسی داده 2020 ، 34 ، 15-28. [ Google Scholar ] [ CrossRef ]
- رنسو، سی. بوگورنی، وی. تسرپس، ک. ماتوین، اس. de Macedo، JAF تجزیه و تحلیل چند وجهی مسیرهای معنایی (MASTER). بین المللی جی. جئوگر. Inf. علمی 2021 ، 35 ، 763-766. [ Google Scholar ] [ CrossRef ]
- ماریسکو-ایستودور، آر. Fränti، P. Cellnet: استنتاج شبکه های جاده از مسیرهای GPS. ACM Trans. تف کردن سیستم الگوریتم (TSAS) 2018 ، 4 ، 1-22. [ Google Scholar ] [ CrossRef ]
- جو، ک. Sunwoo, M. تولید یک نقشه راه دقیق برای خودروهای خودران. IEEE Trans. هوشمند ترانسپ سیستم 2013 ، 15 ، 925-937. [ Google Scholar ] [ CrossRef ]
- ژو، بی. ژنگ، تی. هوانگ، جی. ژانگ، ی. تو، دبلیو. لی، کیو. دنگ، ام. یک سیستم ساخت شبکه عابر پیاده بر اساس مسیرهای پیادهروی جمعسپاری شده. IEEE Internet Things J. 2020 , 8 , 7203–7213. [ Google Scholar ] [ CrossRef ]
- هوانگ، جی. ژانگ، ی. دنگ، م. او، Z. ماینینگ مسیر جمعسپاری و دادههای برچسبگذاری شده جغرافیایی را برای ساخت نقشه راه فضایی-معنای جمعآوری کرد. ترانس. GIS 2022 ، 26 ، 735-754. [ Google Scholar ] [ CrossRef ]
- تانگ، ال. ژائو، ز. یانگ، ایکس. کان، ز. رن، سی. گائو، جی. لی، سی. ژانگ، ایکس. لی، کیو. سنجش جمعیت جاده با وضوح مکانی-زمانی بالا در عصر کلان داده. Acta Geod. کارتوگر. گناه 2022 ، 51 ، 1070. [ Google Scholar ]
- لی، ی. شیانگ، ال. ژانگ، سی. وو، اچ. تلفیق مسیرهای تاکسی و تصاویر RS برای ساختن نقشه راه از طریق DCNN. دسترسی IEEE 2019 ، 7 ، 161487–161498. [ Google Scholar ] [ CrossRef ]
- دیویس، جی جی. برسفورد، آر. Hopper، A. مقیاس پذیر، توزیع شده، تولید نقشه بلادرنگ. محاسبات فراگیر IEEE 2006 ، 5 ، 47-54. [ Google Scholar ] [ CrossRef ]
- الوش، دبلیو. ولی، ع. علیمی، AM بررسی استنتاج نقشه راه موازی از داده های ردیابی GPS بزرگ. Procedia Comput. علمی 2015 ، 53 ، 131-140. [ Google Scholar ] [ CrossRef ]
- وو، اچ. خو، ز. وو، جی. یک روش جدید برای تولید جاده از دست رفته در بلوکهای شهر بر اساس دادههای مسیر ناوبری تلفن همراه بزرگ. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 142. [ Google Scholar ] [ CrossRef ]
- گوا، ی. لی، بی. لو، ز. ژو، جی. روشی جدید برای استخراج شبکه جاده ای از داده های شناور خودرو. ژئو اسپات. Inf. علمی 2022 ، 25 ، 197-211. [ Google Scholar ] [ CrossRef ]
- لی، جی. Qin، Q. زی، سی. ژائو، ی. استفاده یکپارچه از روابط مکانی و معنایی برای استخراج شبکههای جادهای از دادههای شناور خودرو. بین المللی J. Appl. زمین Obs. Geoinf. 2012 ، 19 ، 238-247. [ Google Scholar ] [ CrossRef ]
- تانگ، جی. دنگ، م. هوانگ، جی. لیو، اچ. یک روش جدید برای ساخت تقاطع جاده از داده های مسیر وسیله نقلیه. دسترسی IEEE 2019 ، 7 ، 95065–95074. [ Google Scholar ] [ CrossRef ]
- چنگ، دی. یو، جی. پی، تی. Wu, M. خوشهبندی دادههای موقعیتیابی داخلی با استفاده از E-DBSCAN. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 669. [ Google Scholar ] [ CrossRef ]
- د سوزا، RS; بوکرچه، ا. Loureiro, AA در مورد پیشبینی مسیرهای محدود شبکه جادهای در مقیاس بزرگ. محاسبه کنید. شبکه 2022 ، 206 ، 108337. [ Google Scholar ] [ CrossRef ]
- وانگ، ی. یو، بی. زو، اف. ژانگ، جی. هوانگ، سی. مش سکته مغزی سلسله مراتبی: یک روش تطبیق پیش رونده جدید برای تشخیص تغییرات شبکه جاده در مقیاس چندگانه با استفاده از OpenStreetMap. محاسبات نرم. 2021 ، 25 ، 3155-3173. [ Google Scholar ] [ CrossRef ]
- احمد، م. کاراگیورگو، اس. Pfoser، D.; Wenk, C. مقایسه و ارزیابی الگوریتمهای ساخت نقشه با استفاده از دادههای ردیابی خودرو. GeoInformatica 2015 ، 19 ، 601-632. [ Google Scholar ] [ CrossRef ]
- هاشمي، م. بستر آزمايشي براي ارزيابي الگوريتم هاي ساخت شبكه از روي رديابي هاي GPS. محاسبه کنید. محیط زیست سیستم شهری 2017 ، 66 ، 96-109. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. وانگ، جی. Li, H. تشخیص تضاد توپولوژی با توجه به به روز رسانی افزایشی شبکه های جاده ای چند مقیاسی. ISPRS Int. J. Geo-Inf. 2021 ، 10 ، 655. [ Google Scholar ] [ CrossRef ]
- لی، ی. پنگ، بی. او، ال. فن، ک. تانگ، L. قطعهبندی جاده تصاویر سنجش از راه دور وسیله نقلیه هوایی بدون سرنشین با استفاده از شبکه متخاصم با تجمع زمینه چند مقیاسی. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2019 , 12 , 2279–2287. [ Google Scholar ] [ CrossRef ]
- عبداللهی، ع. پرادان، ب. تکنیک یکپارچه روشهای تقسیمبندی و طبقهبندی با تجزیه و تحلیل اجزای متصل برای استخراج جاده از تصاویر ارتوفتو. سیستم خبره Appl. 2021 ، 176 ، 114908. [ Google Scholar ] [ CrossRef ]
- باستانی، ف. او هست.؛ آببر، س. علیزاده، م. بالاکریشنان، اچ. چاولا، س. مدن، اس. DeWitt, D. Roadtracer: استخراج خودکار شبکه های جاده ای از تصاویر هوایی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018؛ صص 4720–4728. [ Google Scholar ]
- بختیاری، HRR; عبداللهی، ع. رضائیان، ح. استخراج جاده نیمه اتوماتیک از تصاویر دیجیتال. مصر. J. Remote Sens. Space Sci. 2017 ، 20 ، 117-123. [ Google Scholar ] [ CrossRef ]
- عبداللهی، ع. پرادان، بی. Shukla، N. استخراج ویژگیهای جاده از تصاویر پهپاد با استفاده از رویکرد تقسیمبندی مجموعه سطح جدید. بین المللی J. Urban Sci. 2019 ، 23 ، 391-405. [ Google Scholar ] [ CrossRef ]
- عبداللهی، ع. پرادان، بی. شوکلا، ن. چاکرابورتی، اس. Alamri، A. تقسیم بندی چند شی در صحنه های پیچیده شهری از داده های سنجش از دور با وضوح بالا. Remote Sens. 2021 , 13 , 3710. [ Google Scholar ] [ CrossRef ]
- عبداللهی، ع. پرادان، بی. Shukla، N. استخراج جاده از تصاویر ارتوفتو با وضوح بالا با استفاده از شبکه عصبی کانولوشن. J. شرکت هندی Remote Sens. 2021 , 49 , 569–583. [ Google Scholar ] [ CrossRef ]
- عبداللهی، ع. پرادان، بی. Alamri، A. RoadVecNet: رویکردی جدید برای تقسیمبندی شبکه جادهای و برداری همزمان از تصاویر هوایی و گوگل ارث در یک مجموعه شهری پیچیده. GISci. Remote Sens. 2021 , 58 , 1151–1174. [ Google Scholar ] [ CrossRef ]
- عبداللهی، ع. پرادان، بی. شوکلا، ن. چاکرابورتی، اس. Alamri، A. رویکردهای یادگیری عمیق به کار رفته در مجموعه داده های سنجش از راه دور برای استخراج جاده: یک بررسی پیشرفته. Remote Sens. 2020 , 12 , 1444. [ Google Scholar ] [ CrossRef ]
- الشایخلی، ت. لیو، دبلیو. Maruyama، Y. روش خودکار استخراج جاده از تصاویر هوایی با استفاده از یک شبکه عصبی پیچیده عمیق. Appl. علمی 2019 ، 9 ، 4825. [ Google Scholar ] [ CrossRef ]
- شیائو، آر. وانگ، ی. تائو، سی. درک صحنه جاده با دانه بندی ریز از تصاویر هوایی بر اساس شبکه های تقسیم بندی معنایی نیمه نظارت شده. IEEE Geosci. سنسور از راه دور Lett. 2021 ، 19 ، 1-5. [ Google Scholar ] [ CrossRef ]
- گائو، ال. آهنگ، دبلیو. دای، جی. چن، ی. استخراج جاده از تصاویر سنجش از دور با وضوح بالا با استفاده از شبکه عصبی پیچیده باقیمانده عمیق تصفیه شده. Remote Sens. 2019 , 11 , 552. [ Google Scholar ] [ CrossRef ]
- شین، جی. ژانگ، ایکس. ژانگ، ز. Fang, W. استخراج تصاویر از راه دور با وضوح بالا که از DenseUNet گرفته شده است. Remote Sens. 2019 , 11 , 2499. [ Google Scholar ] [ CrossRef ]
- چن، ز. وانگ، سی. لی، جی. زی، ن. هان، ی. Du, J. بایاس بازسازی U-Net برای استخراج جاده از تصاویر سنجش از دور نوری. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2021 , 14 , 2284–2294. [ Google Scholar ] [ CrossRef ]
- Cira، CI; آلکاریا، آر. Manso-Callejo، M.Á. Serradilla, F. چارچوبی مبتنی بر تودرتو شبکه های عصبی کانولوشن برای طبقه بندی جاده های ثانویه در تصاویر هوایی با وضوح بالا. Remote Sens. 2020 , 12 , 765. [ Google Scholar ] [ CrossRef ]
- چاندرا، ن. وایدیا، اچ. Ghosh، JK Human چارچوب مبتنی بر شناخت برای تشخیص جاده ها از تصاویر سنجش از دور. Geocarto Int. 2020 ، 37 ، 2365-2384. [ Google Scholar ] [ CrossRef ]
- دای، جی. زو، تی. ژانگ، ی. ما، ر. استخراج جاده در سطح Li, W. از تصاویر ماهوارهای نوری با وضوح بالا. Remote Sens. 2019 , 11 , 2672. [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. هو، کیو. لی، جی. Ai, M. یادگیری از مسیرهای GPS ماشین شناور برای استخراج جاده های شهری مبتنی بر CNN با تصاویر ماهواره ای با وضوح بالا. IEEE Trans. Geosci. Remote Sens. 2020 , 59 , 1836–1847. [ Google Scholar ] [ CrossRef ]
- DJI Terra. در دسترس آنلاین: https://www.dji.com/cn/dji-terra?site=brandsite&from=nav (در 1 مه 2022 قابل دسترسی است).
- دو، جی. کائو، ایکس. لیانگ، جی. چن، ایکس. Zhan, Y. تقسیم بندی تصویر پزشکی بر اساس u-net: یک بررسی. J. Imaging Sci. تکنولوژی 2020 ، 64 ، 1-12. [ Google Scholar ] [ CrossRef ]
- ون، ال. لی، ایکس. Gao, L. یک شبکه عصبی کانولوشنال انتقال برای تشخیص خطا بر اساس ResNet-50. محاسبات عصبی Appl. 2020 ، 32 ، 6111-6124. [ Google Scholar ] [ CrossRef ]
- او، اچ. یانگ، دی. وانگ، اس. وانگ، اس. استخراج جاده Li، Y. با استفاده از شبکه هرم فضایی آتروس که یکپارچه شبکه رمزگذار-رمزگشا و از دست دادن شباهت ساختاری است. Remote Sens. 2019 , 11 , 1015. [ Google Scholar ] [ CrossRef ]
- بیاجیونی، جی. اریکسون، جی. استنتاج نقشه در مواجهه با نویز و نابرابری. در مجموعه مقالات بیستمین کنفرانس بین المللی پیشرفت در سیستم های اطلاعات جغرافیایی، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 6 تا 9 نوامبر 2022؛ صص 79-88. [ Google Scholar ]




بدون دیدگاه