

کلید واژه ها:
فاجعه رانش زمین ; دانش هدایت شده ؛ تجسم سه بعدی ؛ بهینه سازی صحنه محیط جغرافیایی مجازی
1. مقدمه
2. روش شناسی
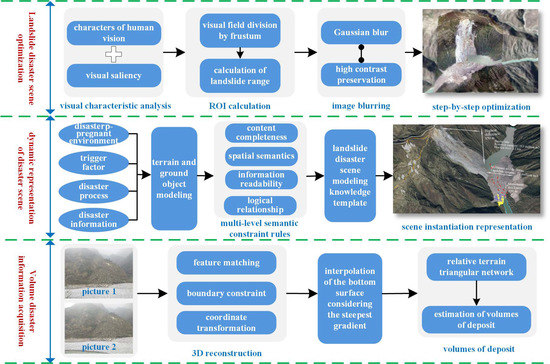
2.1. چارچوب کلی
2.2. دریافت سریع حجم سپرده بر اساس بازسازی سه بعدی
ابتدا با توجه به تصاویر کانسار زمین لغزش به دست آمده، نقاط ویژگی کانسار زمین لغزش به سرعت استخراج و مطابقت داده می شود. تحت محدودیتهای مرزی نهشته لغزش، نقاط ویژگی منطبق غربال میشوند و نقاط ویژگی در محدوده نهشته حفظ میشوند. ترکیب با نقاط ویژگی تصویر، پارامترهای دوربین (شامل فاصله کانونی دوربین f و فواصل کانونی f x و f y دوربین در جهت محور X و Y) محاسبه میشوند و نقاط ویژگی تصویر دوبعدی با استفاده از فرمول های (1) – (3) به نقاط ویژگی سه بعدی تبدیل می شوند.
جایی که ( پ.ایکس، پ.y) مختصات پیکسل نقاط ویژگی هستند، ( تو0، v0) مختصات نقطه مرکز تصویر هستند و ( ایکسج، yج، zج) مختصات نقاط مشخصه در سیستم مختصات دوربین هستند. فرمول (2) ماتریس چرخشی است که با چرخش دوربین حول محور مختصات مربوطه با زاویه مشخصی ایجاد می شود. ( ایکسدبلیو”، Yدبلیو”، زدبلیو”) مختصات سه بعدی نقطه مشخصه P هستند که تحت یک ماتریس چرخش دوربین معین محاسبه می شوند. در نهایت، بر اساس اصل دید دوچشمی، با مرکز نوری دوربین های چپ و راست به عنوان مبدا مختصات، دو خط مستقیم ساخته شده و دو معادله خط مستقیم با هم ترکیب می شوند. مختصات دنیای واقعی پ(ایکسدبلیو،Yدبلیو،زدبلیو)مربوط به نقاط مشخصه را می توان با روش حداقل مربع محاسبه کرد و بازسازی پراکنده نهشته زمین لغزش سه بعدی را می توان صحنه تحقق بخشید.
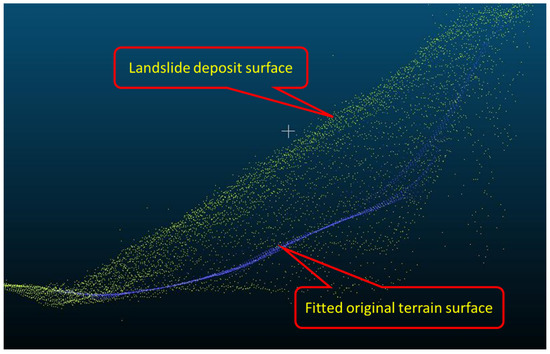
بازسازی سه بعدی فقط می تواند سطح نهشته لغزش را بازسازی کند. زمانی که سطح زیرین آن پوشیده شده باشد، بدست آوردن دقیق توپوگرافی قبل از فاجعه دشوار است. بر اساس وزن فاصله معکوس، یک درون یابی برای سطح پایین با در نظر گرفتن تندترین گرادیان پیشنهاد شده است که Z را کنترل می کند.نرخ سهم ارزش در جهت تندترین افت شیب. رسوب زمین لغزش DEM سطح پایین توسط فرمول (4) درون یابی شده است. تفاوت بین DEM بازسازی شده پس از فاجعه و درونیابی شده سطح پایین محاسبه می شود و یک شبکه مثلثی منظم ساخته می شود. از ایده انتگرال برای محاسبه حجم شبکه مثلثی استفاده می شود و حجم رسوب زمین لغزش را می توان به سرعت به دست آورد.
جایی که ز^ارتفاع نقطه ای است که باید درون یابی شود، و N تعداد نقاط شناخته شده در همسایگی است که باید درون یابی شود (به طور کلی عدد 12 است). θزاویه بین خطی است که نقطه درون یابی را به هم وصل می کند و نقطه شناخته شده در شیب دارترین جهت. هرچه زاویه θ کوچکتر باشد ، وزن فاصله بیشتر است و سهم کمتری در نقطه ای که باید درون یابی شود، خواهد بود. p وزن فاصله نقطه i است ، و α نرخ مشارکت مقدار Z در جهت شیبدارترین گرادیان است، جایی که p = 15 و α = 0.8 [ 41 ].
2.3. تجسم دینامیک با هدایت دانش صحنه فاجعه زمین لغزش
2.4. بهینه سازی صحنه های فاجعه زمین لغزش با در نظر گرفتن برجستگی بصری
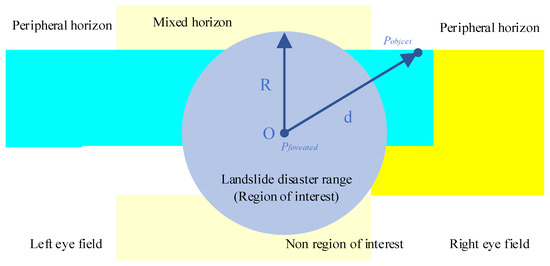
پارامترهای frustum دوربین صحنه شامل مختصات فضای دوربین چپ و راست است سیL(ایکس،y،z) و سیآر(ایکس،y،z)، زاویه دید افقی β ، زاویه دید عمودی α و فاصله از مرکز دوربین تا بخش دور و نزدیک (با f و n نشان داده می شود ). افست fyبین دو طرف بالا و پایین مخروط مشاهده و صفحه XZ و همچنین افست fایکسبین سمت چپ و راست و صفحه YZ ، با فرمول (5) محاسبه می شود.
ماتریس تبدیل مدل آرمبا استفاده از فرمول (2) به دست می آید و از فرمول (6) و (7) برای محاسبه مختصات هشت رئوس استفاده می شود. VLf1، VLf2، VLf3، VLf4، VLn1، VLn2، VLn3و VLn4) از منشور چهار گوش که توسط بخشهای دور و نزدیک مخروط بینایی تشکیل شده است. محدوده فروستوم به یک افق مختلط (محدوده همپوشانی فروستوم) و افق محیطی (محدوده دید تک چشمی) تقسیم می شود و صحنه خارج از محدوده فروستوم به عنوان یک صحنه غیر افق در نظر گرفته می شود.
جایی که f1→، f2→، f3→، و f4→نشان دهنده بردارهای جهت چهار طرف جانبی مهره بینایی است.
محدوده زمین لغزش به عنوان ROI تنظیم شده است. شعاع R است و نقطه مرکزی محدوده فاجعه زمین لغزش به طور پیش فرض روی نقطه نگاه تنظیم شده است. پfovهآتیهد. فاصله بین شی صحنه پoبjهجتیو نقطه نگاه در محدوده دید مختلط با استفاده از فرمول (8) تعیین می شود.
با استفاده از فناوری برش میدان دید، محدوده صحنه بدون دید برش داده می شود و حذف می شود و اشیاء صحنه میدان دید محیطی ساده می شوند. الگوریتم تاری گاوسی در فرمول (9) برای بهینه سازی صحنه دید محیطی استفاده می شود. برای ناحیه غیر مورد علاقه در ناحیه نمای مختلط، الگوریتم بالاگذر بر اساس تاری گاوسی برای بهینهسازی تاری توسط فرمول (10) یکپارچه شده است. ROI با وضوح بالا ارائه می شود. بنابراین، صحنه فاجعه با در نظر گرفتن برجستگی بصری را می توان مرحله به مرحله بهینه کرد که با ویژگی های بصری چشم انسان همخوانی بیشتری دارد.
که در آن S ( x , y ) مقدار پیکسل تصویر اصلی است، GB ( x ، y ) مقدار پیکسل تصویر تار گاوسی است، ( x ، y ) موقعیت ردیف و ستون پیکسل تصویر است، و (2 n + 1 ) ) × (2 n + 1) اندازه هسته کانولوشن است. اگر اندازه هسته کانولوشن 3 × 3 باشد، n = 1. P ثابت هایپرپارامتر است، معمولاً 127، بنابراین کنتراست بالا از تیره شدن بیش از حد تصویر و از دست دادن اطلاعات جلوگیری می کند. NB ( x , y ) مقدار پیکسل در ( x است، y )، که توسط تاری گاوسی و الگوریتم بالا گذر پردازش می شود. مقدار وزن الگوریتم بالاگذر ω است .
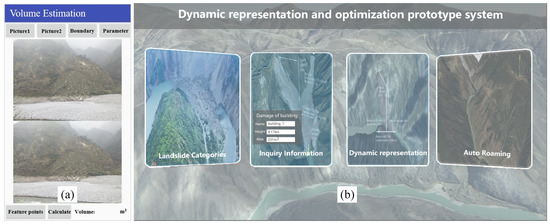
3. نمونه اولیه پیاده سازی سیستم و تجزیه و تحلیل تجربی
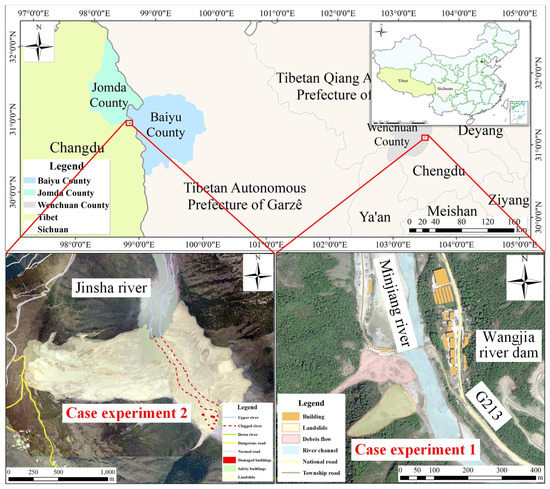
3.1. نمونه اولیه پیاده سازی سیستم و منطقه مطالعه
3.2. تجزیه و تحلیل تجربی
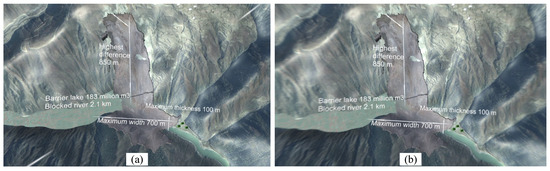
3.2.1. اکتساب سریع حجم سپرده زمین لغزش
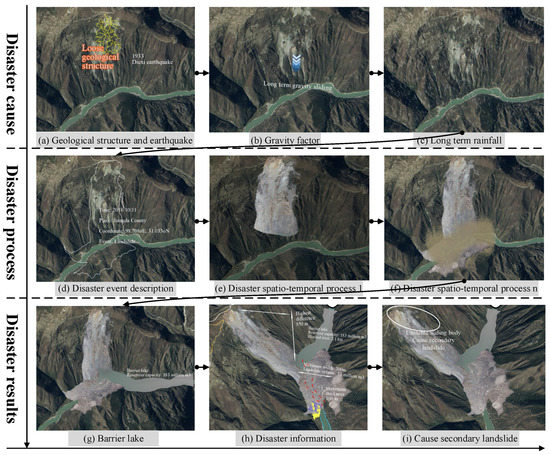
3.2.2. تجسم دینامیک صحنه فاجعه
3.2.3. بهینه سازی صحنه فاجعه
4. نتیجه گیری و کار آینده
منابع
- شوستر، RL اهمیت اجتماعی و اقتصادی زمین لغزش. در زمین لغزش: بررسی و کاهش ; Turner, AK, Schuster, RL, Eds. گزارش ویژه هیئت تحقیقات حمل و نقل 247; آکادمی ملی علوم: واشنگتن، دی سی، ایالات متحده آمریکا، 1996; صص 12-35. [ Google Scholar ]
- UNDRR 2009. گزارش سالانه جهانی، GAR 2009. موجود به صورت آنلاین: https://www.preventionweb.net/english/hyogo/gar/2009/ (دسترسی در 27 مارس 2022).
- پتلی، دی. الگوهای جهانی تلفات جانی ناشی از رانش زمین. زمین شناسی 2012 ، 40 ، 927-930. [ Google Scholar ] [ CrossRef ]
- Cui، P. پیشرفت و چشم انداز در تحقیق در مورد خطرات کوهستانی در چین. Prog. Geogr. 2014 ، 33 ، 145-152. [ Google Scholar ]
- فن، YD; وو، دبلیو. وانگ، دبلیو. لیو، ام. Wen, Q. پیشرفت تحقیق سنجش از دور بلایا در چین. J. Remote Sens. 2016 ، 20 ، 1170-1184. [ Google Scholar ]
- زو، س. Miao، SX; دینگ، ییل. چی، اچ. او، XB; روش شناسایی و حذف خطاهای ناخالص با هدایت دانش Cao، ZY از داده های پایش زمین لغزش. Geomat. Inf. علمی دانشگاه ووهان 2017 ، 44 ، 957-966. [ Google Scholar ]
- خو، Q. ژنگ، جی. لی، WL; او، CY; دونگ، XJ; گوا، سی. Feng, WK Study on Suscessive Damming Landslide Diaming River Jinsha in Baige Village در 11 اکتبر و 3 نوامبر 2018. J. Eng. جئول 2018 ، 26 ، 1534-1551. [ Google Scholar ]
- لی، HB؛ Qi، SC; چن، اچ. لیائو، HM; Cui، YF; تحلیل حرکت انبوه و فرآیند تشکیل ژو، JW از دو رویداد متوالی سد لغزش در رودخانه جینشا، جنوب غربی چین. رانش زمین 2019 ، 16 ، 2247–2258 . [ Google Scholar ] [ CrossRef ]
- UNDRR 2019. گزارش سالانه جهانی 2019، GAR. در دسترس آنلاین: https://gar.undrr.org/report-2019 (در 27 مارس 2022 قابل دسترسی است).
- Wallemacq, P. Losses Economic, Poverty & Disasters: 1998–2017 ; مرکز تحقیقات اپیدمیولوژی بلایا، CRED: بروکسل، بلژیک، 2018. [ Google Scholar ]
- Denolle، MA; دانهام، EM; پریتو، GA; Beroza، GC پیش بینی حرکت زمین قوی با استفاده از زلزله مجازی. Science 2014 ، 343 ، 399-403. [ Google Scholar ] [ CrossRef ]
- UNISDR (استراتژی بین المللی سازمان ملل برای کاهش بلایا). چارچوب سندای برای کاهش خطر بلایا 2015-2030 ؛ سازمان ملل: ژنو، سوئیس، 2015. [ Google Scholar ]
- کوی، ی. دنگ، ج. Xu, C. تخمین حجم و تقسیم مرحله زمین لغزش ماهو در استان سیچوان، چین. نات خطرات 2018 ، 93 ، 941-955. [ Google Scholar ] [ CrossRef ]
- Koca، TK; Koca، برآورد حجم من و ارزیابی زمین لغزش های چرخشی با استفاده از عکس های هوایی چند زمانی در منطقه مخزن سد چاگلایان، ترکیه. عرب جی. ژئوشی. 2019 ، 12 ، 140. [ Google Scholar ] [ CrossRef ]
- فرناندز، تی. پرز-گارسیا، جی ال. گومز-لوپز، جی.ام. کاردنال، جی. مویا، اف. دلگادو، ج. فهرست زمین لغزش چند زمانی و تجزیه و تحلیل فعالیت با استفاده از فتوگرامتری هوایی و تکنیک های LiDAR در منطقه ای از جنوب اسپانیا. Remote Sens. 2021 , 13 , 2110. [ Google Scholar ] [ CrossRef ]
- لیو، دبلیو. یامازاکی، اف. Maruyama، Y. تشخیص زمین لغزش های ناشی از زلزله در طول زلزله کوماموتو 2018 با استفاده از داده های هوابرد چند زمانی لیدار. Remote Sens. 2019 , 11 , 2292. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گلوفکو، دی. بهلینگ، ر. وتزل، اچ. روشهای روسنر، S. GIS و دادههای سنجش از دور چند زمانی برای بهبود نقشهبرداری خطر زمین لغزش در جنوب قرقیزستان. بین المللی J. Geoinform. 2015 ، 11 ، 23-29. [ Google Scholar ]
- هوانگ، ی. یو، م. خو، Q. سوادا، ک. موریگوچی، اس جی. یاشیما، ا. لیو، سی دبلیو؛ مدلهای ارتفاعی دیجیتال مشتقشده از Xue، L. InSAR برای تحلیل تغییر زمین زمین لغزشهای جریانمانند ناشی از زلزله بر اساس تصاویر ALOS/PALSAR. محیط زیست علوم زمین 2015 ، 73 ، 7661-7668. [ Google Scholar ] [ CrossRef ]
- بایر، بی. سیمونی، ع. اشمیت، دی. Bertello، L. استفاده از تکنیکهای پیشرفته InSAR برای نظارت بر تغییر شکلهای زمین لغزش ناشی از حفر تونل در آپنین شمالی، ایتالیا. مهندس جئول. 2017 ، 226 ، 20-32. [ Google Scholar ] [ CrossRef ]
- گوزتی، اف. آردیزون، اف. کاردینالی، م. روسی، ام. Valigi، D. حجم زمین لغزش و نرخ بسیج زمین لغزش در Umbria، ایتالیا مرکزی. سیاره زمین. علمی Lett. 2009 ، 279 ، 222-229. [ Google Scholar ] [ CrossRef ]
- فن، XM; اسکارینگی، جی. کوروپ، او. غرب، ای جی. ون وستن، سی جی; تانیاس، اچ. هوویوس، ن. Hales, TC; جیبسون، RW; Allstadt، KE; و همکاران زنجیره های خطرات زمین شناسی ناشی از زلزله: الگوها، مکانیسم ها و اثرات کشیش ژئوفیس. 2019 ، 57 ، 421-503. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مایر، سی. جابویدوف، م. درون، MH; گربر، سی. روشی برای ارزیابی احتمال تخمین ضخامت و حجم گسیختگی های اولیه زمین لغزش های کوچک و کم عمق بر اساس مساحت سطح. رانش زمین 2020 ، 17 ، 975-982 . [ Google Scholar ] [ CrossRef ]
- مارتا، TR; Reddy، PS; بهات، سی ام. راج، KBG; نالینی، ج. پادمانابها، EA؛ نارندر، بی. کومار، KV; مورالیکریشنان، س. رائو، جی اس. و همکاران تخمین حجم زباله و نظارت بر دریاچه سد شده با لغزش رودخانه Phuktal در زانسکار هیمالیا، هند با استفاده از تصاویر Cartosat-2. زمین لغزش 2017 ، 14 ، 373-383. [ Google Scholar ] [ CrossRef ]
- واریک، جی. ریچی، AC; اشمیت، KM; رید، من؛ لوگان، جی. مشخص کردن زمین لغزش فاجعهبار ماد کریک ۲۰۱۷، کالیفرنیا، با استفاده از فتوگرامتری تکرار ساختار از حرکت (SfM). رانش زمین 2019 ، 16 ، 1201-1219 . [ Google Scholar ] [ CrossRef ]
- گونزالس-دیز، آ. فرناندز ماروتو، جی. دوغی، مگاوات؛ دیاز د تران، جی آر. بروشی، وی. کاردنال، جی. پرز، جی.ال. ماتا، ای. دلگادو، ج. توسعه یک رویکرد روش شناختی برای اندازه گیری دقیق تغییرات شیب ناشی از زمین لغزش، با استفاده از فتوگرامتری دیجیتال. زمین لغزش 2014 ، 11 ، 615-628. [ Google Scholar ] [ CrossRef ]
- لین، CH; Lin، ML تکامل زمین لغزش بزرگ ناشی از طوفان موراکوت: مطالعه موردی در رودخانه بوتانگبوناسی، جنوب تایوان با استفاده از روش عنصر گسسته. مهندس جئول. 2015 ، 197 ، 172-187. [ Google Scholar ] [ CrossRef ]
- Xu, B. مطالعه بر روی ویژگی های تغییر شکل ناپایداری و مدل لغزش زمین لغزش خزشی . دانشگاه علم و صنعت پکن: پکن، چین، 2017. [ Google Scholar ]
- Du، ZQ; Li, J. روش شبیه سازی فاجعه زمین لغزش بر اساس سیستم ذرات PhysX. Geomat. جهان 2017 ، 24 ، 46-50. [ Google Scholar ]
- لیو، LB تحقیق تجسم سه بعدی زمین لغزش مخزن بر اساس 3dsMAX و OpenGL . Northwest A&F University: Yangling، چین، 2010. [ Google Scholar ]
- ژو، بی . تجسم سه بعدی و شبیه سازی دینامیک زمین لغزش در منطقه سه دره . دانشگاه Tsinghua: پکن، چین، 2012. [ Google Scholar ]
- او، شبیهسازی بصری فرآیند زمین لغزش کوهستان بر اساس دادههای سنجش از دور چندمنبعی و چند زمانی . دانشگاه جیائوتنگ جنوب غربی: چنگدو، چین، 2019. [ Google Scholar ]
- دی، بی اف; استاماتوپولوس، کالیفرنیا؛ استاماتوپولوس، AC; لیو، EN; بالا، L. پیشنهاد، کاربرد و اعتبار بخشی از یک عبارت ساده شده ارزیابی پایداری دامنه های شنی در شرایط بارندگی. ژئومورفولوژی 2021 ، 395 ، 107966. [ Google Scholar ] [ CrossRef ]
- Iverson، RM زمین لغزش با نفوذ باران. منبع آب Res. 2000 ، 36 ، 1897-1910. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بگیر، WA; بولتون، دکتر وانگ، PCP؛ Yeung، FJ ارزیابی مکانیسمهای ایجاد زمین لغزش در شیبهای پر شدن مدل. زمین لغزش 2004 ، 1 ، 173-184. [ Google Scholar ] [ CrossRef ]
- داسی، ف. اتینگر، بی. پروتو، اس. سنگالی، LM یک استراتژی ساده سازی مش برای تجزیه و تحلیل رگرسیون فضایی بر روی سطح قشر مغز. ریاضی شماره اپل. 2015 ، 90 ، 111-131. [ Google Scholar ] [ CrossRef ]
- زو، س. چن، XW; دینگ، ییل. لیو، مگاوات؛ او، HG; یانگ، WJ; چن، LY; Cao، ZY سازماندهی و روش زمانبندی دادههای صحنه شهری سه بعدی که توسط ادراک بصری هدایت میشوند. J. جنوب غربی Jiaotong دانشگاه. 2017 ، 52 ، 869-876. [ Google Scholar ]
- هو، ی. ژو، جی. لی، WL; ژانگ، YH; زو، س. چی، اچ. ژانگ، HX; کائو، زی. یانگ، WJ; Zhang, PC ساخت و بهینه سازی صحنه های فاجعه سه بعدی در واقعیت مجازی موبایل. ISPRS Int. جی. ژئو. Inf. 2018 ، 7 ، 215. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لای، جی ال. دینگ، ال. Qin، ZY; تانگ، XC یک تحقیق الگوریتم موثر سازماندهی وکسل سازی سناریو و حذف انسداد. Iop Conf. 2016 , 46 , 012020. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Robles-Ortega، MD; اورتگا، ال. Feito، FR تعیین دید کارآمد در صحنه های شهری با در نظر گرفتن اطلاعات زمین. ACM Trans. تف کردن سیستم الگوریتم 2017 ، 3 ، 1-24. [ Google Scholar ] [ CrossRef ]
- فو، ال. ژو، جی. لی، WL; زو، س. Xu, BL; Xie، YK; ژانگ، YH; هو، ی. Lu، JT; دانگ، پی. و همکاران روش بهینهسازی دید تونلی برای صحنههای سیل VR بر اساس تاری گاوسی. بین المللی جی. زمین رقمی. 2021 ، 14 ، 821-835. [ Google Scholar ] [ CrossRef ]
- فو، ال. ژو، جی. لی، WL; شما، جی جی. Hua، ZY روش تخمین سریع حجم رسوب زمین لغزش با بازسازی سه بعدی تصاویر گوشی های هوشمند. رانش زمین 2021 ، 18 ، 3269-3278 . [ Google Scholar ] [ CrossRef ]
- مورا، OE; چن، جی. استویبر، پ. کوپانی، ز. پلوتا، دی. جوسنهانس، آر. Okubo، M. دقت برآوردهای ذخیره با استفاده از فتوگرامتری sUAS کم هزینه. بین المللی J. Remote Sens. 2020 , 41 , 4512–4529. [ Google Scholar ] [ CrossRef ]


بدون دیدگاه