

خلاصه
با تسریع روند شهرنشینی، مشکلات ناشی از آب و هوای شدید مانند حوادث باران شدید بیش از پیش جدی شده است. در چنین رویدادهایی، جاده و تاسیسات کمکی آن ممکن است در جریان طوفان و آب گرفتگی آسیب ببینند و در نتیجه ظرفیت تردد آن کاهش یابد. بارش یک فرآیند پیوسته در بعد فضا-زمان است و از آنجایی که داده های بارندگی از طریق ایستگاه های نظارت گسسته به دست می آیند، داده های بارندگی به دست آمده دارای ویژگی های گسسته بازه زمانی و مکان هستند. به منظور تسهیل کاربران در درک تأثیر غرقابی شهری بر ترافیک، تجسم اطلاعات غرقابی باید تحت جزئیات مکانی و زمانی متفاوت نمایش داده شود. از این رو، مناسب بودن دانه بندی تجسم مستقیماً بر شناخت کاربر از نقشه غرقابی جاده تأثیر می گذارد. برای حل این مشکل، این مقاله یک مدل کمی محاسباتی دانه بندی فضایی و دانه بندی زمانی را برای تجسم مکانی-زمانی غرقابی جاده ایجاد کرد و روش ارزیابی مدل بر اساس آزمایش شناخت بود. حداقل واحد تجسم بخش جاده 50 متر است و ما یک روش درجه بندی عمق 5 سطحی و دو طرح رنگی برای تجسم غرقابی جاده بر اساس شناخت کاربر پیشنهاد کردیم. برای تأیید امکانسنجی روش، ما یک سیستم نمونه را توسعه دادیم و یک تجسم مکانی-زمانی پویا از فرآیند غرقابی در منطقه اصلی شهری نانجینگ، چین را اجرا کردیم.
کلید واژه ها:
تجسم مکانی-زمانی ؛ آب گرفتگی شهری ; هشدار بلایا ؛ دانه بندی بصری درجه بندی پویا
1. معرفی
بلایای سیل شایع ترین بلایای هواشناسی است. طبق آمار، خسارات ناشی از بلایای سیل به تنهایی به 40 درصد در سراسر جهان می رسد. در مقابل پسزمینه شهرنشینی سریع، با پروژههای جدید ساختوساز، بازسازی و توسعه، تغییر شرایط سطح اولیه و افزایش سطح غیرقابل نفوذ، مشکل غرقابی شهری بیش از پیش جدیتر شده است [1، 2 ] .]. طوفان و فاجعه غرقابی بر بسیاری از جنبه های سیستم پیچیده شهر تأثیر می گذارد، به عنوان مثال، جاده و تأسیسات جانبی آن در روند طوفان و آب گرفتگی آسیب می بیند و در نتیجه ظرفیت تردد آن کاهش می یابد. هنگامی که سیستم ترافیک قطع یا فلج شود، تأثیر بسیار نامطلوبی بر تولید و زندگی شهر خواهد داشت. در این میان، سیستم حمل و نقل شهری به عنوان اسکلت شهر و حامل سفر، آسیب پذیرترین بدنه باربری در طوفان و غرقابی است [ 3 ]. در مدیریت بلایا، تجزیه و تحلیل اولویت کانونی دقیق از چگونگی سازگاری جوامع با این رویدادهای در حال تغییر می تواند بینشی در مورد راه حل های عملی ارائه دهد [ 4]]. بنابراین، ما میتوانیم مناسبت و اثربخشی خدمات هواشناسی را بهبود بخشیم و مزایای خدمات هواشناسی را برای انجام یک سرویس هشدار زودهنگام در مورد غرقابی شهری به طور کامل وارد کنیم.
برای شهرهای درجه یک، از طریق ایستگاههای هواشناسی، ایستگاههای رصد هیدرولوژیکی و حسگرهای آب جادهای در سراسر شهر، هر روز تعداد زیادی دادههای پایش هواشناسی پیوسته و متنوع تولید میشود. با کمک این داده های هواشناسی و از طریق ادغام با داده های زمین، شبکه جاده، وضعیت جاده و VGI (اطلاعات جغرافیایی داوطلبانه)، یک مجموعه داده مکانی-زمانی بزرگ می تواند توسط اداره هواشناسی برای نظارت و پیش بینی غرقابی شهری استفاده شود. و کمک مؤثری به ادارات مربوطه جهت ارزیابی غرقابی سرک.
آب گرفتگی جاده ها ایمنی رانندگی را کاهش می دهد [ 5]. در حال حاضر بیشترین تجسم غرقابی شهری برای نشان دادن مساحت و عمق غرقابی است. با این حال، اگر این نقشه ها بخواهند تأثیر ترافیک را نشان دهند، باید دو موضوع مورد بحث قرار گیرد. اولاً، وضعیت غرقابی شهری به طور کلی دادههای سطح شبکه در هنگام مشاهده است، اما جاده و شرایط ترافیکی آن عمدتاً دادههای خط برداری هستند. تفاوت بین این دو نوع داده برای ارزیابی جامع شرایط جاده مشکلاتی را به همراه دارد، بنابراین باید مطابقت داشت. ثانیاً، به دلیل اتصال شبکه جادهای، تأثیر جریان ترافیک و عمق آب بر شرایط جاده جهانی نیست، فقط بر بخشهای غرقابی جاده مربوطه تأثیر میگذارد، بنابراین، دانهبندی بخشهای جاده در مقیاسهای مختلف باید به طور مناسب انتخاب شود. .
با این حال، به دلیل شکافهای موجود در زمینههای مختلف حرفهای، هیچ روش مؤثری برای درجهبندی پویا برای تجسم وجود ندارد تا عمق آبگرفتگی جاده را نشان دهد و عموم نمیتوانند این اطلاعات را به صورت شهودی درک کنند و در نتیجه پیشبینی آن به طور کامل درک نمیشود. . طبقه بندی پدیده های پیچیده جغرافیایی در سطوح مختلف برای بهبود در دسترس بودن نقشه گام مهمی است. با توجه به ناهمگونی فضایی غرقابی شهری و پیچیدگی فرآیند جغرافیایی آن، هنگام تجسم عمق غرقابی جاده ها در سطوح مختلف، باید درجه بندی پویا در فرآیند تجسم در نظر گرفته شود. برای ویژگی های هندسی و معنایی جاده مانند عمق غرقابی، جریان ترافیک و صافی سطح جاده که اغلب به صورت خطی بیان می شوند. آنها دارای ویژگی های ناهمگونی فضایی هستند. در فرآیند تجسم، جاده معمولاً به چند بخش کوچک با طول معین تقسیم می شود تا توزیع فضایی آن محقق شود. با توجه به ویژگیهای متغیر مکانی – زمانی غرقابی شهری، هنوز روشهای مناسبی برای درجهبندی دینامیکی غرقابی جادهها وجود ندارد.
هدف این مقاله تجسم اطلاعات غرقابی است که تحت دانه بندی های مختلف مکانی و زمانی نمایش داده می شود. وضعیت آبگرفتگی جاده اغلب در بخشهای جاده محلی رخ میدهد، بنابراین نیاز به بیان چند مقیاسی و چند سطحی بر اساس بخشهای جاده در تجسم مکانی-زمانی دارد. تجسم غرقابی جاده در انیمیشن فضایی-زمانی مرجع علمی برای بخش پیشگیری از بلایا و بخش مدیریت ترافیک برای مشخص کردن استراتژیهای اضطراری، کمک به عموم مردم در درک شرایط جادهای از اطلاعات غرقابی انباشته شده، و در تنظیم برنامههای سفرشان مفید است.
2. کارهای مرتبط
2.1. آبگرفتگی جاده ها: تعاریف و معیارهای ارزیابی
غرقابی شهری به پدیده ای اطلاق می شود که بارندگی شدید یا بارندگی مداوم در مناطق شهری از ظرفیت تاسیسات آب باران شهری فراتر رفته و باعث غرقابی در مناطق شهری می شود [ 6 ]. رویدادهای بارش شدید و طوفان های شهری ناشی از آن ابتدا در کشورهای توسعه یافته در اروپا و آمریکا یافت شد که شهرنشینی سریع داشتند و سپس توجه جهانی را به خود جلب کرد [ 7 ، 8 ، 9 ]. وقوع آب گرفتگی شهری عمدتاً به دلیل چهار دلیل زیر ایجاد می شود [ 10]: (1) رویدادهای شدید باران شدید. (2) غرقابی در رودخانه بیرونی. (3) تغییرات در سطح زیرین شهر بر قانون تولید و تلاقی تأثیر می گذارد. و (4) برنامه ریزی و طراحی سیستم های زهکشی غیر منطقی است.
آب گرفتگی جاده ها در محیط های شهری عمدتاً به دلیل پایین تر بودن ارتفاع سطح جاده نسبت به سطوح اطراف (به ویژه روگذرهای مقعر) است و نفوذپذیری آب زمین سخت شده کاهش می یابد، بنابراین نزولات جوی ناشی از باران شدید نمی تواند از سطح زمین تخلیه شود. رواناب یا از طریق نفوذ تخلیه می شود، بنابراین باید در سطح جاده جمع شود.
آبگرفتگی جاده ها معمولاً با دو شاخص اندازه گیری می شود: (1) عرض آب روسازی جاده. و (2) عمق آب جاده [ 6 ]. عرض آب روسازی جاده به عرض آب در جهت حاشیه های جاده تا خط مرکزی جاده اشاره دارد ( شکل 1 )، عمق آب جاده عمیق ترین عمق آب روی خط است. هنگامی که چندین خط در هر طرف خط مرکزی جاده وجود دارد، نزدیکترین خط به طاق جاده اندازه گیری می شود ( شکل 2 ). بنابراین، باید توجه داشت که در طول فرآیند اندازه گیری، اولی نیازی به در نظر گرفتن تعداد و عرض خطوط ندارد، در حالی که دومی برعکس است.
2.2. جمع آوری داده ها و شبیه سازی غرقابی شهری
در حالت ایدهآل، دادههای غرقاب شهری باید توسط حسگرهای غرقابی نظارت شوند، با این حال، دادههای نظارتی فعلی سنسورهای غرقاب نمیتوانند ویژگیهای توزیع مکانی-زمانی غرقاب شهری را منعکس کنند. محققان به طور گسترده ای از مدل های غرقابی هیدرولوژیکی و باران برای شبیه سازی و محاسبه غرقابی تحت سناریوهای مختلف بارندگی، به منظور ارزیابی و پیش بینی توزیع مکانی- زمانی غرقاب استفاده می کنند [ 11 ، 12 ].
با این حال، مدلهای غرقاب باران بیشتر به فرآیند محاسباتی شبیهسازی غرقاب میپردازند. از منظر تجسم جغرافیایی، برای تحلیل و تجسم فرآیند مکانی-زمانی غرقابی شهری، بررسی ساخت مدل داده غرقاب شهری در بعد فضا-زمان ضروری است. مدل دادههای مکانی-زمانی یک مدل داده برای مدیریت متمرکز دادههای مکانی-زمانی است که ویژگی مهم آن این است که بیان مشخصه دادههای مکانی-زمانی کاملتر از مدل دادههای مکانی سنتی است که مشکل محدود بودن را حل میکند. نوع و کمیت اطلاعات مکانی-زمانی [ 13 ، 14]. از زمانی که لانگران و کریسمن [ 15 ] GIS مکانی-زمانی (سیستم اطلاعات جغرافیایی) را پیشنهاد کردند، مدل داده های مکانی-زمانی توسعه سریعی را تجربه کرد، در این مرحله، چهار مدل داده کلاسیک وجود دارد: مدل عکس فوری توالی [16]، مدل تصحیح حالت پایه [ 16 ]. 17 ]، مدل ترکیبی فضا-زمان، و مدل مکعب فضا-زمان. بر این اساس، بسیاری از محققان علم اطلاعات جغرافیایی مدلهای دادههای مکانی-زمانی را برای زمینههای کاربردی مختلف مانند مدلهای داده شیگرا [18]، مدل دادههای مکانی-زمانی مبتنی بر رویداد (ESTDM) [ 19] پیشنهاد کردهاند.] و غیره. این نظریه و کاربرد مدل داده های مکانی-زمانی را بسیار غنی می کند. مدل داده های مکانی – زمانی یک مدل داده ای است که برای توصیف فرآیند تغییر مکانی – زمانی پدیده های جغرافیایی استفاده می شود. در حال حاضر، مطالعه فرآیندهای مکانی-زمانی مانند غرقابی شهری بر اساس مدل داده های مکانی-زمانی است [ 20 ، 21 ]. برای نیازهای بصری آبگرفتگی جاده ها، ایجاد یک مدل داده مکانی-زمانی غرقابی جاده ضروری است.
2.3. روش های تجسم مکانی-زمانی
مدلهای دادههای مکانی-زمانی مفهوم دانهبندی را در ذخیرهسازی معرفی میکنند، که در آن یک موجودیت پیوسته به مجموعههای متعددی از دادههای گسسته با اندازه مشابه در مدل ذخیرهسازی به شیوهای منظم تقسیم میشود و دانهبندی کوچکترین واحد است. از آنجایی که سه بعد داده های مکانی-زمانی عبارتند از فضا، زمان و معناشناسی، دانه بندی نیز به دانه بندی مکانی، دانه بندی زمانی و دانه بندی معنایی تقسیم می شود.
تحقیق در این مقاله شامل دانه بندی فضایی و دانه بندی زمانی است. دانه بندی فضایی اطلاعات جغرافیایی میزان جزئیات اطلاعات جغرافیایی را در مقیاس فضایی بیان می کند و بیشترین ارتباط را با سطح جزئیات جغرافیایی دارد [ 22 ]. برای دانه بندی فضایی، فاصله فاصله مستقیم از نقطه نمونه برداری است، که در آن فاصله کوچکتر، دانه بندی فضا ریزتر است. اندازه دانه بندی فضایی را می توان به عنوان یک روش تقسیم شده از داده های مکانی در فرآیند بصری واقعی در نظر گرفت. Zuo [ 23 ] زمانی روش تقسیم بندی پویا را برای مدیریت داده های جاده به کار برد، و نرم افزار تجاری Mapbox استفاده از کاشی های برداری را برای تحقق بخشیدن به پارتیشن فضایی داده های برداری پیشنهاد می کند (Mapbox 2016) [24 ]]. با توجه به محدودیتهای مقیاس و محدودیتهای گرافیکی در فرآیند تجسم چند مقیاسی، وان [ 25 ] یک قانون غرقابی بین دانهبندی تقسیم مسیر سواری و سطح مقیاسبندی نقشه پیشنهاد کرد.
از سوی دیگر، دانه بندی زمانی به فرکانس یا فاصله زمانی زمانی که یک رویداد یا پدیده رخ می دهد، اشاره دارد و ارتباط نزدیکی با دانه بندی فضایی دارد. تحقیقات دانه بندی زمانی در تجسم مکانی-زمانی معمولاً به طور مستقیم به فاصله نمونه برداری از خود داده ها بستگی دارد [ 26 ]. در تجسم بعد زمانی، محققان بیشتری بر تعیین مقیاس زمانی و تولید فریمها بر اساس سریهای زمانی تمرکز کردهاند [ 27 ]. علاوه بر این، اگر رویدادها با انیمیشن تجسم شوند، مدت زمان و نرخ تغییر نماد بصری نیز یک دانه بندی زمانی است [ 28 ].
3. روش شناسی
3.1. استخراج عمق غرقابی جاده
دادههای غرقابی جاده بهدستآمده در این مقاله توسط سیستم هشدار زودهنگام طوفان و غرقاب رودخانه Huaihe که توسط مرکز خدمات هواشناسی جیانگ سو توسعه داده شده است، ارائه شده است، و نتیجه خروجی دادههای شطرنجی سطحی است [29 ] . در فرآیند تجسم مکانی-زمانی غرقابی جاده، دقت استخراج عمق غرقابی مستقیماً بر اثر تجسم تأثیر می گذارد. بنابراین، استخراج اطلاعات عمق غرقابی از دادههای غرقابی جادهای بهدستآمده شامل دو موضوع کلیدی است: (1) نحوه تطبیق دادههای رسری غرقابی جاده با شبکه جادهای بردار. و (2) نحوه اصلاح تغییر عمق غرقابی ناشی از ارتفاع جاده.
بنابراین در این مقاله راه حل های زیر پیشنهاد شده است. در دادههای سطحی با فرمت شطرنجی که توسط سیستم شبیهسازی برگردانده میشود، مقدار هر پیکسل بر اساس میانگین ارتفاع فضایی که پیکسل در آن قرار دارد، میانگین عمق آب را نشان میدهد. از آنجایی که آب یک سیال است، فرض کردیم که سطح آب صاف است، بنابراین، فقط باید ارتفاع واقعی نقطه نمونه برداری را دانست و آن را با ارتفاع متوسط جبران کرد. بر اساس حل دو موضوع فوق، روش زیر را برای به دست آوردن عمق آب جاده پیشنهاد کردیم که جریان اصلی در شکل 3 نشان داده شده است .
این روش عمدتاً به چهار مرحله تقسیم میشود: (1) جاده را با طول مشخصی تقسیم کنید، با اشاره به بالاترین دقت در منبع داده، و ما این طول را 1 متر تعیین میکنیم. (2) نقطه مرکزی بخش کوچک را پس از تقسیم به عنوان “نقطه نمونه برداری” این بخش در نظر بگیرید. (3) انحراف بین ارتفاع نقطه نمونه برداری و ارتفاع متوسط پیکسل را از طریق داده های DEM (مدل ارتفاع دیجیتال) با دقت بالا محاسبه کنید، فیلد داده “offset” را سپرده گذاری کنید. (4) اطلاعات عمق پیکسل را که نقطه نمونه برداری در آن قرار دارد استخراج کنید و از فیلد “offset” برای تصحیح عمق غرقابی استفاده کنید و آن را در قسمت داده “عمق” قرار دهید. برای مراحل فوق، (1) تا (3) یک عملیات واحد هستند، که در آن نتیجه محاسبه را می توان به عنوان داده های میانی در پایگاه داده برای استفاده مجدد بعدی ذخیره کرد. و (4) پس از هر محاسبه غرقاب شهری یکبار اجرا خواهد شد. از طریق این روش، اطلاعات غرقابی با وضوح بالا را می توان در قسمت های مختلف شبکه راه به دست آورد و در مطالعه دانه بندی بعدی برای محاسبه عمق آب زیربخش های جاده تحت دانه بندی های مختلف استفاده می شود.
3.2. درجه بندی طرح عمق و رنگ غرقابی جاده
در “راهنمای فنی برای خدمات هشدار خطر ذاتی شهری” [ 30]، برای انعکاس دقیق تأثیر بلایای غرقابی شهری بر بدنههای حامل بلایای مختلف، ویراستار غرقاب شهری را به چهار سطح تقسیم میکند و معیارهای تقسیم عمق متفاوت بر اساس بدنههای حامل مختلف تنظیم میشود. عمق آب جاده بر وضعیت رانندگی وسایل نقلیه تأثیر می گذارد که در اینجا به طبقه بندی معیارهای عمق غرقابی اشاره کردیم. در عین حال، در طراحی نقشه، متغیرهای بصری باید تمام محدوده مقادیر را پوشش دهند، بنابراین سطح 0-5 سانتی متر باید اضافه شود. علاوه بر این، با توجه به سازگاری اعداد و مطابقت آن با تغییر جهت عمق آب، سطح کامپایل مجدد معکوس، سطح متغیر بصری را در سیستم تجسم شکل می دهد، همانطور که در جدول 1 نشان داده شده است .
در تجسم مکانی-زمانی غرقابی جاده، از رنگ ها برای نشان دادن سطوح مختلف عمق آب جاده استفاده می شود. طرح های رنگی عمق آب این مقاله در جدول 2 نشان داده شده است . با توجه به اینکه تنظیم رنگ باید با عادات صنعت مطابقت داشته باشد، طرح 1 تحت تطابق رنگ مشابه ارائه شده است، که در آن تن از سرد به گرم تغییر می کند، و عمق غرقابی کمتر از سبز است، که به افراد بصری ایمن تری می دهد. نشان دهنده این است که وضعیت غرقابی در این زمان تاثیر زیادی نخواهد داشت و با افزایش سطح، رنگ به تدریج به سمت قرمز حرکت می کند و احساس بصری نسبتاً تنشی به افراد می دهد، به این معنی که میزان آبگرفتگی جاده در این زمان است. زمان باید مورد توجه قرار گیرد علاوه بر این، طرح 2 به Wu [31 ] برای نتایج تحقیقات مربوطه در مورد طراحی نماد غرقابی، که در آن طراحی رنگ تحت یک لحن یکپارچه انجام شد تا عمق غرقابی را نشان دهد، همانطور که در عادات شناختی کاربر، رنگ آبی می تواند به راحتی با آب ارتباط برقرار کند و رنگ تیره تر رنگ یک اشاره روانی از افزایش کمیت را تشکیل می دهد.
3.3. حداقل واحد تجسم غرقابی جاده ها
در تجسم مکانی-زمانی، داده ها را می توان به سه سطح تقسیم کرد: لایه ویژگی، لایه هدف، و لایه جزئیات هندسی [ 32 ]. لایه ویژگی مجموعه ای از همان نوع اشیاء با معنایی یکسان است و ویژگی به اطلاعات غرقابی جاده در این مقاله اشاره دارد. لایه هدف یک ویژگی فضایی فردی با اهمیت مستقل است و هدف در این مقاله به عمق غرقابی یک جاده واحد اشاره دارد. لایه جزئیات هندسی ساختاری است که با یک ویژگی تقسیم می شود و واحد اصلی هدف است. برای تجسم مکانی-زمانی غرقابی جاده، از «بخش زمانی- مکانی جاده» [ 33 ] به عنوان کوچکترین واحد تجسم استفاده کردیم .
با توجه به روند کل آب گرفتگی شهری، عمق آب گرفتگی در بخش جاده در زمان های مختلف همچنان تغییر خواهد کرد. به عنوان مثال، در باران شدید مداوم با شدت کم، غرقابی در بخش جاده به تدریج عمیق تر می شود و عمق آب در جاده ابتدا روند افزایشی و سپس کاهشی با تغییر را نشان می دهد. بارش باران. بنابراین، برای بخش جاده، بر اساس تجسم فضایی، اهمیت بعد زمانی نیز باید در نظر گرفته شود. فرعی موقت جاده بین دو تقاطع مجاور در یک دوره معین است. همانطور که در شکل 4 نشان داده شده استبر اساس بخش S، جدول زمانی کل فرآیند غرقاب اضافه می شود، یک زیربخش زمانی دو بعدی تشکیل می شود و مقیاس زمانی می تواند شامل واحدهای اندازه گیری زمان مانند سال، ماه، روز، ساعت و غیره باشد. غرقابی معمولاً مظهر غرقابی شهری ناشی از بارندگی شدید است، که ویژگی وقوع مستقل غیر دوره ای را نشان می دهد. بنابراین، محدوده مقیاس زمانی این مقاله، مدت زمان فرآیند غرقابی یک جاده است، St نشان دهنده مقطع S یک دوره معین و در شکل، مقطع S دوره t1 تا t2 است.
با ترکیب دو بعد فوق، یک زیربخش جاده مکانی-زمانی ایجاد می شود. بر اساس توزیع فضایی، بخش S به چند بخش فرعی تقسیم می شود. بر اساس روند زمانی تکامل فرآیند جغرافیایی، بخش S به چند بخش فرعی تقسیم می شود. پس از تقسیم دو بعد، هر واحد تقسیمبندی دو بعدی در زیربخش جاده مکانی-زمانی Sct شکل میگیرد و هر کدام کوچکترین واحد تجسم مکانی-زمانی غرقابی جاده را در این مقاله تشکیل میدهند.
3.4. ساخت مدل دانه بندی بصری فضایی-زمانی
تحقیق در مورد دانه بندی تجسم فضا-زمان، در چارچوب این مقاله، بررسی چگونگی تقسیم زیربخش جاده مکانی-زمانی بود. تغییر مقیاس باعث تغییر در محیط بیان غرقابی جاده ها می شود. در واقع، دانه بندی تجسم مکانی و زمانی نتیجه عوامل تأثیرگذار متعدد است. در این فرآیند، گسترش هر یک از عوامل مشکلات خاص بسیاری را در بر خواهد داشت. هنگام ساخت مدل محاسبه دانه بندی بصری مکانی و زمانی برای غرقابی جاده ها، لازم است که هر یک از علل محدودیت که در نهایت بر دانه بندی مکانی و دانه بندی زمانی تأثیر می گذارد، تجزیه و تحلیل شود، همانطور که در جدول 3 نشان داده شده است .
3.4.1. مدل محاسبه دانه بندی فضایی
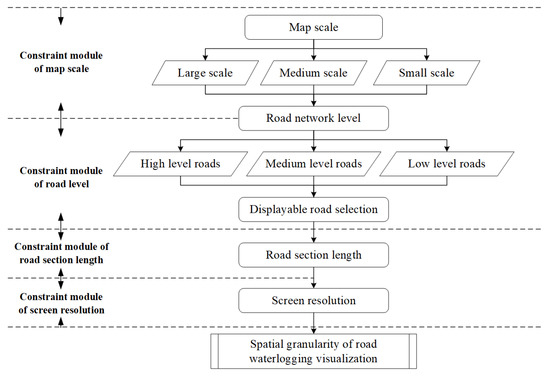
مدل محاسبه دانه بندی فضایی در شکل 5 نشان داده شده است، که عمدتاً به چهار ماژول زیر تقسیم می شود. (1) ماژول محدودیت مقیاس. این ماژول مقدار بار بخش های جاده را تحت مقیاس فعلی محدود می کند و درجات جاده نمایش داده شده با تغییر مقیاس تغییر می کند، یعنی یک فرآیند محدودیت پویا برای سطوح شبکه راه ها شکل می گیرد، بنابراین به طور غیر مستقیم بیان اطلاعات غرقابی را محدود می کند. از بخش های جاده (2) ماژول محدودیت سلسله مراتب شبکه جاده. ماژول محدودیت سلسله مراتبی شبکه جاده، بخشها و شبکههای خاصی را که میتوانند اطلاعات غرقابی را حمل کنند، محدود میکند و پایه دانهبندی فضایی را از طریق انتخاب جاده قابل مشاهده محدود میکند. (3) ماژول محدودیت بخش جاده. در مقیاس فعلی، طول واقعی هر بخش، دانهبندی فضایی بالایی در بخش را محدود میکند. (4) ماژول محدودیت وضوح صفحه نمایش.
3.4.2. مدل محاسبه دانه بندی زمانی
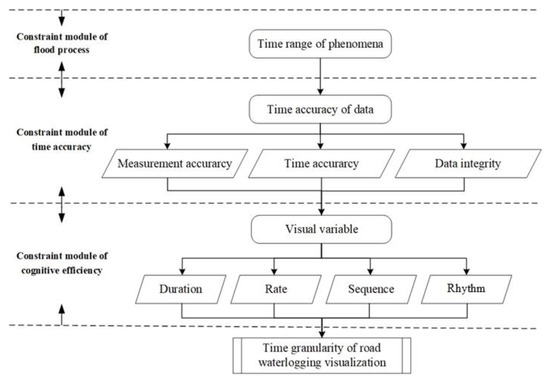
مدل محاسبه دانه بندی زمانی در شکل 6 نشان داده شده است، که عمدتاً به سه ماژول زیر تقسیم می شود: (1) ماژول محدودیت فرآیند غرقاب. زمانی که برنامه تجسم رخ میدهد، ماژول حد بالایی محدوده را محدود میکند، و کل مدت وقوع غرقابی، کل مدت غرقابی جاده است، و در این زمان تقسیم دانهبندی زمانی بزرگتر از فاصله طولانی بیمعنی است. (2) ماژول محدودیت دقت زمان. ماژول دقیق دادههای مکانی-زمانی، دقت و عملی بودن اطلاعات فضایی را محدود میکند، که عمدتاً تحت تأثیر عواملی مانند دقت اندازهگیری زمان، ثبات زمانی و یکپارچگی زمانی است و دقت زمانی دادهها مستقیماً بر صحت نتایج بصری (3) ماژول محدودیت کارایی شناختی. کارایی شناختی حد پایینی حداقل تقسیم بندی دانه بندی زمانی را محدود می کند. متاثر از کارایی شناختی انسان، متغیرهای بصری پویا مانند مدت زمان، نرخ تغییر، ترتیب تغییر و ریتم تغییر باید به طور کامل در محاسبه دانه بندی زمانی مورد استفاده قرار گیرند.
به طور خلاصه، دانه بندی زمانی ابتدا تحت تأثیر فرآیند غرقابی است که علت غرقابی است و دقت داده های زمانی و مکانی دقت ابعاد زمانی را در تجسم محدود می کند زیرا کارایی شناختی انسان بیان متغیرهای بصری را محدود می کند. در تجسم پویا بنابراین، در مدل محاسبه دانه بندی زمانی، پارامترهای اصلی مورد استفاده عبارت بودند از: (1) زمان وقوع غرقابی، حوزه زمانی تقسیم دانه بندی زمانی را تعیین می کند، بنابراین حد بالایی تقسیم دانه بندی زمانی را محدود می کند. (2) دقت داده ها از جمله ارزیابی دقت اندازه گیری زمان داده ها، سازگاری زمانی، و یکپارچگی زمانی و سطح دقت آن، حد پایین فاصله تقسیم دانه بندی زمانی را محدود می کند. و (3) متغیرهای بصری، منعکس شده در طول زمان، نرخ تغییر، تغییر ترتیب، و تغییر ریتم نمادهای پویا. بیان تجسم پویا هدف تقسیم دانه بندی زمانی است. ادراک بصری که توسط نمادهای پویا متشکل از متغیرهای بصری به ارمغان میآید، مستقیماً تقسیم دانهبندی زمانی نهایی را تعیین میکند.
4. اجرا و ارزیابی
4.1. طراحی مقطع مکانی – زمانی
مشکل دانه بندی در تجسم مکانی-زمانی غرقابی جاده به طور خاص طول و فاصله زمانی زیربخش مکانی-زمانی است. بر اساس معماری سیستم، برای کاهش بار محاسباتی مشتری، روش اجرای نهایی این است که یک پایگاه داده دانهای از قبل در سمت سرور ایجاد شود، زیرا مشتری فقط لایه داده غرقابی مربوطه را به وب سرور مبتنی بر وب درخواست میکند. در مورد محدودیت ها
(1) دانه بندی فضایی
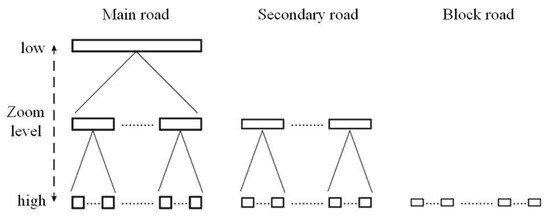
نمایش بصری شبکه جاده در شکل 7 نشان داده شده است ، جایی که دو تغییر قابل توجه در فضا دارد. با تغییر سطح زوم، تعداد جاده ها و اندازه بخش تغییر می کند. برای منطقه مورد مطالعه، سطح مقیاس بندی مناسب 12-15 است. به این دو دلیل، سیستم سطح شبکه راه در منطقه مورد مطالعه را طبق جدول 4 طبقه بندی می کند .
در منطقه مورد مطالعه، سیستم پنج دانه بندی برای تجسم ارائه کرد: بخش جاده، 500 متر، 200 متر، 100 متر و 50 متر. علاوه بر بخش جاده، حداکثر اندازه دانه بندی 500 متر بود و محدودیت های اصلی میانگین طول بخش جاده و توزیع فضایی غرقاب بود. حداقل اندازه دانه بندی 50 متر بود و محدودیت اصلی محدودیت تصویر نقشه بود. در جدول 4همچنین میتوانیم ببینیم که بین اندازه ذرات زیربخش در مقیاسهای مختلف رابطه گنجاندن وجود دارد. بنابراین، غرقابی بخش فرعی با درجه بالا را می توان از چندین بخش فرعی سطح پایین ادغام کرد، که باعث صرفه جویی در قدرت محاسباتی سیستم بیشتر از تقسیم بندی مکرر با دانه بندی های مختلف می شود. یک ساختار کدگذاری زیربخش معقول به مرتب کردن روابط گنجانده شده در همه سطوح کمک می کند، که برای اجرای الگوریتم فوق راحت است.
(2) دانه بندی زمانی
تجسم پویا شامل پارامترهای زیر است: (1) محدوده زمانی داده. (2) فاصله زمانی مهر داده در هر فریم. و (3) زمان تعویض در هر فریم. برای این سیستم، دانه بندی زمانی عمدتاً به فاصله زمانی مهر داده هر فریم اشاره دارد. مقدمه مختصری در مورد تنظیمات سه پارامتر فوق وجود دارد. محدوده زمانی معمولاً یک فرآیند کامل غرقابی در طوفان باران است که همچنین می تواند با توجه به نیاز کاربر به دوره مورد علاقه تنظیم شود. و فاصله زمانی مهر داده هر فریم به بالاترین فرکانس به روز رسانی داده موجود بستگی دارد. ماژول شبیهسازی غرقاب شهری این سیستم میتواند هر 10 دقیقه پیشبینی غرقابی را ارائه دهد، بنابراین، حداقل دانهبندی زمانی 10 دقیقه است. زمان تعویض هر فریم به کارایی شناختی کاربر بستگی دارد.
4.2. نمونه اولیه سیستم تجسم غرقابی جاده
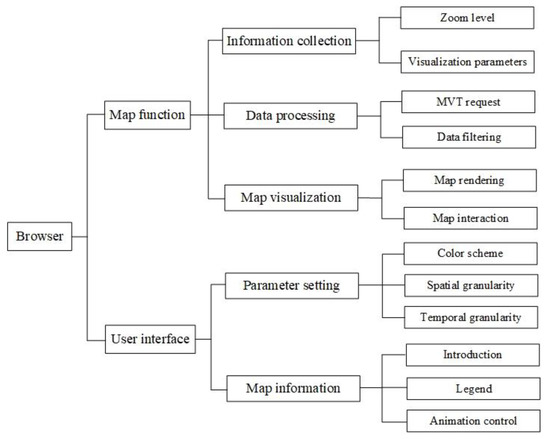
بر اساس الزامات سیستم برای کراس پلتفرم، انتشار اطلاعات به عنوان یک صفحه WebGIS انتخاب خوبی است. ما MapBox GL JS را به عنوان چارچوب تجسم بر اساس سه ملاحظات زیر انتخاب کردیم: (1) در ترکیب با فناوری MVT (Mapbox Vector Tile)، می تواند بار بارگذاری داده ها را در تجسم کاهش دهد و بارگذاری سریع داده های مکانی-زمانی را درک کند. ; (2) با ترکیب با MapBox Studio، طراحی نقشه را می توان از طریق یک پلت فرم تعاملی انجام داد و زیبایی رندر نقشه را تضمین کرد و قابلیت استفاده از نقشه را بهبود بخشید. و (3) با استفاده از WebGL، دسترسی متقابل پلتفرم محقق می شود، و این امکان برای تجسم سه بعدی بعدی محفوظ است. معماری اصلی ماژول تجسم در شکل 8 نشان داده شده است .
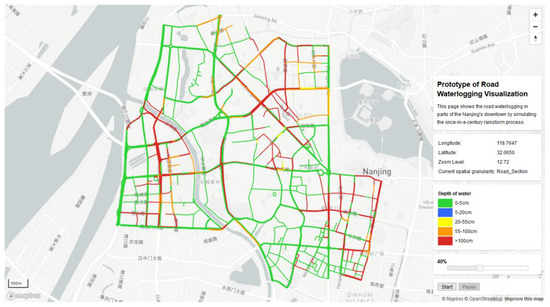
رابط تجسم از طریق مرورگر وب کاربر، همانطور که در شکل 9 نشان داده شده است ، عمدتا شامل دو بخش است.
(1) اطلاعات نقشه
ارائه نقشه در ظرف Canvas صفحه وب از طریق Mapbox GL. از “سبک نور” به عنوان نقشه پایه استفاده کنید و بر این اساس لایه آب جاده را روی هم قرار دهید. علاوه بر بدنه اصلی صفحه، همچنین شامل (1) یک نوار کنترل ناوبری است که در سمت راست بالای رابط قرار دارد که عملکرد بزرگنمایی و چرخش تصویر پایه را ارائه می دهد. (2) نوار مقیاس، واقع در سمت چپ پایین رابط. و (3) اطلاعات حق چاپ نقشه، در سمت راست پایین صفحه قرار دارد.
(2) اطلاعات کمکی
بر اساس اصول کارتوگرافی، ملزومات نقشه تکمیلی و دکمه های کنترلی لازم برای تجسم پویا شامل (1) عنوان است. (2) اطلاعات تحت نمای فعلی مانند طول و عرض جغرافیایی، سطح زوم، دانه بندی فضایی. (3) افسانه; (4) نوار پیشرفت زمان. و (5) سوئیچ پخش انیمیشن.
4.2.1. اثر عملی تقسیم بندی دانه بندی
(1) دانه بندی فضایی
اثر عملکرد دانه بندی فضایی بر اساس مدل محاسبه دانه بندی فضایی ارائه شده در بخش 3.4.1 است . در این سیستم اثرات زیر قابل توجه تر است:
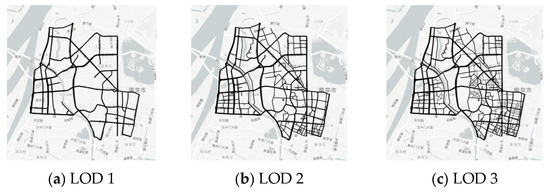
① سلسله مراتب شبکه راه
بر اساس جدول 4 ، شبکه جاده دارای محتویات نمایشی متفاوتی تحت نسبت های بزرگنمایی متفاوت است. در این منطقه مورد مطالعه، اثر نمایش آن در شکل 10 نشان داده شده است :
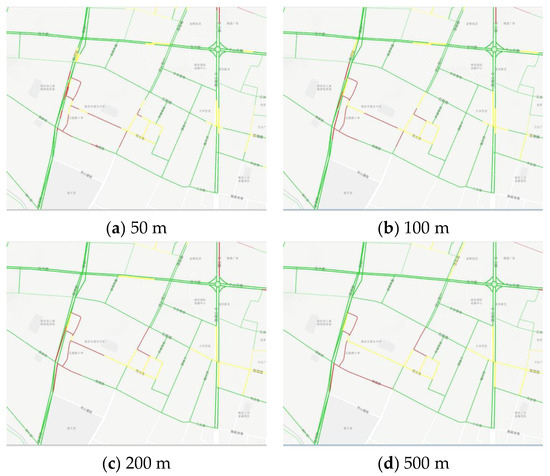
② تغییر طول زیر بخش
طول بخش های فرعی تحت نسبت های مقیاس بندی مختلف متفاوت است. در این منطقه مورد مطالعه، اثر همانطور که در شکل 11 نشان داده شده است .
(2) دانه بندی زمانی
عملکرد دانه بندی زمانی بر اساس مدل محاسبه دانه بندی زمانی ارائه شده در بخش 3.4.2 است . در این سیستم، جنبه های زیر اهمیت بیشتری دارند:
① فاصله زمانی مهر داده در هر فریم. برای اطمینان از روان بودن انیمیشن، فاصله زمانی مهر داده هر فریم باید تا حد امکان کم باشد و فرکانس به روز رسانی داده ها به 10 دقیقه محدود شده است.
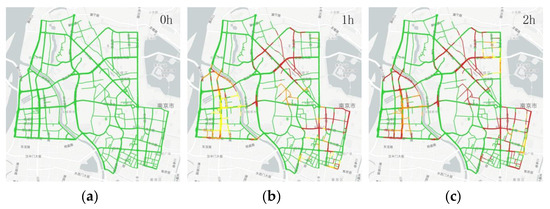
② زمان تعویض در هر فریم. سرعت سوئیچینگ انیمیشن به شدت توسط کارایی شناختی کاربر محدود شده است. پس از تجزیه و تحلیل، محدوده مقادیر می تواند از 500 میلی ثانیه تا 2000 میلی ثانیه مناسب تر باشد، با پیش فرض 1000 میلی ثانیه. شکل 12 روند کامل یک طوفان باران را نشان می دهد که 10 ساعت در منطقه مورد مطالعه به طول می انجامد، که در 0 ساعت تا 10 ساعت بیان می شود، و تجسم پویا در ساعت (طرح 1 در انتخاب طرح رنگ جدول 2 ) :
4.2.2. نظرسنجی کاربران
(1) هدف آزمایشی
در بخش 4.2.1 ، اثر واقعی سیستم نمونه اولیه از دو جنبه دانه بندی فضایی و دانه بندی زمانی نشان داده شده است. برای تأیید رضایت کاربران نقشه از روش تجسم مکانی-زمانی پیشنهادی در این مقاله، یک آزمایش آزمایشی کاربر طراحی شد. ابتدا، همانطور که در شکل 13 نشان داده شده است، ناحیه تابع تعامل کاربر را طراحی کردیم. کاربر می تواند آزادانه پارامترهای مختلف مربوط به جلوه تجسم را انتخاب کند، از جمله: (1) سبک رنگ: به کاربر اجازه می دهد آزادانه دو طرح رنگی غرقابی جاده را که توسط سیستم ارائه می شود انتخاب کند. (2) دانه بندی فضایی: کاربر می تواند سه طرح از بخش اصلی جاده، شبکه جاده درشت دانه، و شبکه جاده ریز دانه را انتخاب کند. و (3) دانه بندی زمانی: کاربر می تواند محدوده زمانی و سرعت پخش غرقابی جاده را انتخاب کند.
(2) فرآیند آزمایشی
در مجموع 32 شرکت کننده برای شرکت در آزمایش دعوت شدند که همگی دارای پیشینه تحصیلی در نقشه کشی و تجسم بودند. قبل از آزمایش، تأثیر احتمالی هر پارامتر بر روی جلوه تجسم را از طریق صدا و متن رو در رو یا از راه دور برای شرکتکنندگان توضیح دادیم و سپس به شرکتکنندگان اجازه دادیم هر پارامتر را برای حدود 5 تا 10 دقیقه تنظیم کنند تا احساس کنند جلوه تجسم غرقابی جاده تحت پارامترهای مختلف تا زمانی که کاربر پارامترها را تنظیم نکرد و تصور کرد که اثر تجسم غرقابی جاده در این زمان بهترین تنظیم در ذهن کاربران است، سپس تنظیمات پارامتر در JSON (ابجکت جاوا اسکریپت) ذخیره شد. Notation) رشته ای برای جمع آوری اطلاعات تنظیمات پارامتر نهایی هر شرکت کننده.
(3) نتایج تجربی و تجزیه و تحلیل
نتایج همانطور که در جدول 5 نشان داده شده است، که در آن نتایج تجربی نشان داد که 72٪ از کاربران طرح رنگ 1 را ترجیح می دهند، که در آن از سیستم های رنگی مختلف با تفاوت های مشخص برای تجسم عمق غرقابی جاده استفاده شده است. در مجموع 15.6٪ از مردم فکر می کردند که برای تجسم غرقابی جاده، نیازی به تقسیم بخش های جاده با استفاده از داده های اصلی شبکه راه نیست، اما 84.4٪ از مردم هنوز پارامترهای دانه بندی فضایی را تعیین می کنند و فکر می کنند که بخشبندی بخشهای جادهای فرعی برای تجسم غرقابی جاده مساعد بود، اما برای انتخاب درشتدانه و ریزدانه، تمایل قابلتوجهی وجود نداشت. در مجموع 69٪ از مردم محدوده پخش 10 ساعت را انتخاب کردند، به این معنی که اکثر مردم مایل به مشاهده یک فرآیند غرقابی کامل بودند، و 75٪ از مردم سرعت پخش 640-1295 میلی ثانیه را انتخاب کردند. که نزدیک به تنظیمات پیش فرض 1000 ms سیستم است. در پایان، شرکت کنندگان به طور کلی ارزیابی مثبتی از قابلیت استفاده از سیستم نمونه اولیه ارائه کردند.
5. بحث
موضوع این مطالعه روش تجسم مکانی-زمانی هشدار زودهنگام غرقاب شهری بر اساس درجه بندی پویا بود. برای تمرکز بر این هدف تحقیقاتی، ابتدا عمق غرقابی جاده را که توسط مرکز خدمات هواشناسی جیانگ سو ارائه شده بود استخراج کردیم، اما از آنجایی که داده های ارائه شده در قالب شطرنجی بودند، باید با شبکه جاده های برداری مطابقت داشته باشند. عمق آب گرفتگی جاده توسط آنها بر اساس میانگین ارتفاع مکانی بود. با این حال، ما دادههای DEM با دقت بالا را در منطقه مورد مطالعه به دست آوردیم و روشی را برای بخشبندی جاده برای تصحیح دادههای اصلی غرقابی جاده پیشنهاد کردیم. اولین،
دوم، ما به طور علمی عمق آبگرفتگی جاده ها را به پنج سطح تقسیم کردیم و دو طرح رنگی را با توجه به عادات شناختی کاربران تنظیم کردیم. اولین طرح تطبیق رنگ سیستمهای رنگی مختلف بود، که در آن رنگ از سرد به گرم بود، بنابراین عمق غرقابی با سبز کمتر شروع شد و به تدریج با افزایش عمق به قرمز تغییر کرد که به افراد احساس بصری نسبتاً تنشی میدهد. میزان آبگرفتگی جاده ها در این زمان توجه کاربران را به خود جلب می کند. طرح 2 تطبیق رنگ با همان سیستم رنگی بود. در عادات شناختی کاربران، آبی رنگی است که به راحتی با آب مرتبط می شود و هر چه رنگ تیره تر باشد، غرقابی عمیق تر است. در آزمایش تست شناختی کاربر، 72 درصد از افراد طرح 1 را با سیستم های رنگی مختلف ترجیح دادند.
سوم، مشکل دانه بندی در تجسم مکانی-زمانی غرقابی جاده ها به طور خاص در مورد طول و فاصله زمانی تقسیم بندی مکانی-زمانی است.
(1) دانه بندی فضایی: دو تغییر فضایی قابل توجه در ساختار شبکه راه های چند مقیاسی و چند سطحی وجود دارد و با تغییر سطح مقیاس، تعداد جاده ها و اندازه بخش های جاده تغییر می کند. با این حال، فاصله تقسیم زیر بخش ها را نمی توان بی نهایت کاهش داد، که منجر به افزایش حجم داده ها می شود. در این منطقه آزمایشی، پنج نوع دانه بندی تقسیم بندی ارائه می شود: بخش جاده، 500 متر، 200 متر، 100 متر و 50 متر.
(2) دانه بندی زمانی: محدوده زمانی معمولاً یک فرآیند کامل از طوفان باران و غرقاب است. فاصله مهر زمانی هر فریم به بالاترین فرکانس بهروزرسانی داده موجود بستگی دارد. از آنجایی که مرکز خدمات هواشناسی جیانگ سو میتواند هر 10 دقیقه یک پیشبینی غرقابی ارائه کند، حداقل زمان دانهبندی روی 10 دقیقه تنظیم شده است، و زمان تعویض هر فریم به کارایی شناختی کاربر بستگی دارد. مقدار پیش فرض یک ثانیه است، اما کاربر می تواند آن را مطابق با آن تنظیم کند.
در نهایت، ما یک سیستم نمونه اولیه از تجسم مکانی-زمانی برای هشدار غرقاب ساختیم. برای تأیید رضایت کاربران نقشه از روش تجسم مکانی-زمانی پیشنهادی در این مقاله، یک آزمایش آزمایشی کاربر طراحی کردیم. برای حدود 5 تا 10 دقیقه، کاربران سعی کردند پارامترهای مختلف (سبک رنگ، دانه بندی فضایی، دانه بندی زمانی) را تنظیم کنند تا اثر بصری آبگرفتگی جاده را تحت پارامترهای مختلف احساس کنند و در نهایت نتایج نشان داد که اکثر کاربران مایل به مشاهده یک فرآیند کامل هستند. 75 درصد از کاربران سرعت پخش 640 تا 1295 میلیثانیه را انتخاب کردند که نزدیک به تنظیمات پیشفرض 1000 میلیثانیه سیستم بود. در مجموع 84.4٪ از کاربران پارامترهای دانه بندی فضایی را تنظیم می کنند.
6. نتیجه گیری
این مقاله رویکردی را برای تجسم غرقابی جاده ها در بعد مکانی-زمانی، به ویژه تحقیق در مورد دانه بندی مکانی- زمانی تجسم غرقابی جاده ها، اجرا می کند. برای رفع فقدان نقشههای موضوعی که تأثیر غرقابی شهری را بر ترافیک جادهها در قالب برداری نشان میدهد، روش درجهبندی دینامیکی مکانی-زمانی و تجسم را برای هشدار غرقابی جادهها پیشنهاد کردیم و یک سیستم نمونه برای ارزیابی روش پیشنهادی طراحی شد. . نتایج اجرا و آزمایش نشان داد که روش تجسم مکانی – زمانی غرقابی جاده با قابلیت استفاده از نقشه های موضوعی غرقاب شهری همبستگی مثبت دارد.
در آینده ترکیبی از هشدار اولیه آبگرفتگی جاده ها و جریان ترافیک را در نظر خواهیم گرفت. کارکرد اصلی هشدار آب گرفتگی جاده ها، ارائه اطلاعات کمکی برای شهروندان شهری در تصمیم گیری سفرشان است. بنابراین، یک مورد توجه می تواند تغییر متغیرهای بصری متعدد برای بیان وضعیت جاده و غرقابی به طور جامع باشد، که تا حد زیادی قابلیت استفاده سیستم را بهبود می بخشد. علاوه بر این، مطالعه حساسیت مدل داده ها باید مورد بررسی قرار گیرد و سازگاری مدل را با وضوح های مختلف DEM و داده های آب و هوایی مکرر بهبود بخشد.
منابع
- کفی، م. میشرا، بی. کومار، پی. ماساگو، ی. فوکوشی، ک. ارزیابی آسیب مستقیم سیل با استفاده از رویکرد تحلیل فضایی تحت تأثیرات تغییرات آب و هوا: مطالعه موردی در حوضه آبخیز شهری در هانوی، ویتنام. ISPRS Int. جی. ژئو. Inf. 2018 ، 7 ، 29. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وانگ، ی. ژانگ، سی. ژانگ، ی. هوانگ، اچ. Feng, L. بدست آوردن نوع پوشش زمین برای مدل سیل طوفان شهری در تصاویر پهپاد با استفاده از تکنیک های خوشه بندی MRF و MKFCM. ISPRS Int. جی. ژئو. Inf. 2019 ، 8 ، 205. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- یین، جی. یو، دی. ویلبی، آر. مدلسازی تأثیر فرونشست زمین بر سیلاب شهری: مطالعه موردی مرکز شهر شانگهای، چین. Ence Total Environ. 2016 ، 544 ، 744-753. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ون آکره، اس. بولنز، جی. دی وولف، ا. De Maeyer, P. الگوریتم استخراج داده برای گواهینامه های عملکرد انرژی (EPC) برای تخمین حداکثر آسیب اقتصادی ساختمان ها برای ارزیابی اثرات اقتصادی سیل در فلاندر، بلژیک. ISPRS Int. جی. ژئو. Inf. 2018 ، 7 ، 272. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- زنگ، ک. شن، جی. هوانگ، اچ. وان، ام. Shi, J. ارزیابی و نقشهبرداری ناهمواری سطح جاده بر اساس سنسورهای GPS و شتابسنج در تلفنهای هوشمند نصبشده روی دوچرخه. حسگرها 2018 ، 18 ، 914. [ Google Scholar ] [ CrossRef ] [ PubMed ] [ نسخه سبز ]
- وزارت مسکن و توسعه شهری – روستایی جمهوری خلق چین. کد فنی برای پیشگیری و کنترل سیل شهری (GB51222-2017) ; چاپ برنامه ریزی چین: پکن، چین، 2017. موجود به صورت آنلاین: https://www.doc88.com/p-00999962057742.html (در 31 مه 2020 قابل دسترسی است).
- Dore, MH تغییرات آب و هوا و تغییرات در الگوهای بارش جهانی: چه می دانیم؟ محیط زیست بین المللی 2005 ، 31 ، 1167-1181. [ Google Scholar ] [ CrossRef ]
- جونگمن، بی. وارد، پی جی. Aerts، JCJH مواجهه جهانی با سیل رودخانه ها و ساحلی: روندها و تغییرات بلند مدت. گلوب. محیط زیست تغییر 2012 ، 22 ، 823-835. [ Google Scholar ] [ CrossRef ]
- Kunkel، KE; کارل، TR; بروکس، اچ. کوسین، جی. Lawrimore, JH; آرنت، دی. بوسارت، ال. چانگنون، دی. کاتر، SL; دوسکن، ن. و همکاران نظارت و درک روند در طوفان های شدید. گاو نر صبح. هواشناسی Soc. 2013 ، 94 ، 499-514. [ Google Scholar ] [ CrossRef ]
- Huang, G. تبعیض رابطه بین جلوگیری از غرقاب طوفان شهری و ساخت و ساز شهر اسفنجی. خشکسالی سیل چین Manag. 2018 ، 28 ، 8-14. [ Google Scholar ] [ CrossRef ]
- جیانگ، LEI; چن، ی. وانگ، اچ. شبیه سازی سیل شهری بر اساس مدل SWMM. IAHS-AISH Proc. 2015 ، 368 ، 186-191 . [ Google Scholar ] [ CrossRef ]
- بابایی، س. قضاوی، ر. عرفانیان، م. شبیه سازی سیل شهری و اولویت بندی زیرحوضه های بحرانی شهری با استفاده از مدل SWMM و رویکرد PROMETHEE II. فیزیک شیمی. قطعات زمین 2018 ، 105 ، 3–11. [ Google Scholar ] [ CrossRef ]
- وانگ، اچ. مطالعه بر روی مدل داده های مکانی-زمانی برای اجسام متحرک فضایی. دانشگاه مهندسی اطلاعات، 2005. موجود به صورت آنلاین: https://oversea.cnki.net/KCMS/detail/detail.aspx?dbcode=CDFD&dbname=CDFD9908&filename=2007051589.nh (دسترسی در 31 مه 2020).
- Hua, Y. مشکلات اصلی و فن آوری های کلیدی سیستم اطلاعات فرا فضایی. جی. ژئومات. علمی تکنولوژی 2016 ، 33 ، 331-335. [ Google Scholar ]
- لانگران، جی. کریسمن، NR چارچوبی برای اطلاعات جغرافیایی زمانی. کارتوگرافی: بین المللی جی. جئوگر. Inf. جئوویس. 1988 ، 25 ، 1-14. [ Google Scholar ] [ CrossRef ]
- آرمسترانگ، MP موقتی در پایگاههای داده فضایی. در مجموعه مقالات GIS/LIS’88. 1988. در دسترس آنلاین: https://ir.uiowa.edu/geog_pubs/212/ (دسترسی در 31 مه 2020).
- Kucera, G. زمان در سیستم های اطلاعات جغرافیایی ; مطبوعات CRC: سیاتل، WA، ایالات متحده آمریکا، 1992; در دسترس آنلاین: https://dl.acm.org/doi/book/10.5555/76485 (در 31 مه 2020 قابل دسترسی است).
- Worboys، MF; هرنشاو، اچ ام. Maguire، DJ مدل سازی داده های شی گرا برای پایگاه داده های فضایی. بین المللی جی. جئوگر. Inf. سیستم 1990 ، 4 ، 369-383. [ Google Scholar ] [ CrossRef ]
- Peuquet, DJ; Duan، N. یک مدل داده مکانی-زمانی مبتنی بر رویداد (ESTDM) برای تجزیه و تحلیل زمانی دادههای جغرافیایی. بین المللی جی. جئوگر. Inf. Sys 1995 ، 9 ، 7-24. [ Google Scholar ] [ CrossRef ]
- گونگ، جی. لی، ایکس. Wu, H. مدل داده های مکانی-زمانی برای GIS بلادرنگ. Cehui Xuebao Acta Geodaetica Cartographica Sinica 2014 ، 43 ، 226-232. [ Google Scholar ] [ CrossRef ]
- ژو، سی. دونگ، Q. تحقیق در مورد مدل دادههای فرآیند مکانی-زمانی دریایی و ساخت سیستم نمونه اولیه آن. مارس Sci. گاو نر 2012 ، 31 ، 667-674. [ Google Scholar ] [ CrossRef ]
- لیو، ک. لانگ، ی. Qin, Y. در مورد دانه بندی فضایی اطلاعات جغرافیایی. Geogr. جغرافیایی Inf. علمی 2014 ، 30 ، 8-12. [ Google Scholar ]
- زو، ایکس. لی، کیو. Tang, L. مدل سازی سه بعدی و سازماندهی داده های بزرگراه. Geomat. Inf. علمی دانشگاه ووهان 2004 ، 29 ، 179-183. [ Google Scholar ] [ CrossRef ]
- Mapbox. مشخصات کاشی وکتور Mapbox. اسناد Mapbox. 2016. در دسترس آنلاین: https://docs.mapbox.com/vector-tiles/specification/ (در 31 مه 2020 قابل دسترسی است).
- Wan, M. تحقیق در مورد اندازهگیری و تجسم ناهمواری سطح جاده بر اساس سنسورهای تلفن هوشمند حملشده با دوچرخه. دانشگاه عادی نانجینگ، 2017. در دسترس آنلاین: https://oversea.cnki.net/KCMS/detail/detail.aspx?dbcode=CMFD&dbname=CMFD202001&filename=1017280207.nh (دسترسی در 31 مه).
- چن، ایکس. وانگ، جی. ژانگ، دبلیو. لیائو، ی. لی، اف. ساختار روایی تحلیل بصری GeoInt. جی. ژئومات. علمی تکنولوژی 2017 ، 34 ، 85-90. [ Google Scholar ]
- آندرینکو، جی. آندرینکو، ن. Wrobel, S. ابزارهای تحلیل بصری برای تجزیه و تحلیل داده های حرکتی. ACM SIGKDD Explor. Newsl. 2007 ، 9 ، 38-46. [ Google Scholar ] [ CrossRef ]
- Ai, T. نماد پویا و نقشه پویا. جی. ووهان تک. دانشگاه Surv. نقشه 1998 ، 23 ، 47-51. [ Google Scholar ] [ CrossRef ]
- شی، ایکس. Sun، M. فن آوری طراحی و تحقیق در مورد سیستم هشدار اولیه برای غرقابی شهری در استان جیانگ سو. مدرن Surv. نقشه 2019 ، 05 ، 6–9. [ Google Scholar ]
- Zhou، L. تحقیق در مورد شناسایی ریسک غرقابی شهری بر اساس SWMM. دانشگاه جنوب غربی جیائوتنگ، 2016. موجود به صورت آنلاین: https://oversea.cnki.net/KCMS/detail/detail.aspx?dbcode=CMFD&dbname=CMFD201701&filename=1016152300.nh (در 32020 مه قابل دسترسی است).
- Wu, X. روشهای ارزیابی قابلیت استفاده برای نمادهای نقشه خطر سیل. پایان نامه کارشناسی ارشد، دانشگاه عادی نانجینگ، نانجینگ، چین، 2019. [ Google Scholar ]
- Ai، T. فن آوری ها و استراتژی های کلیدی در توسعه پایگاه داده فضایی در مقیاس چندگانه. علمی فنی Rev. 2004 , 12 , 4-8. [ Google Scholar ]
- ژنگ، ز. تحقیق در مورد ویژگیهای مکانی-زمانی جرم و تجسم بر اساس شبکه خیابانی. دانشگاه ژجیانگ، 2016. موجود به صورت آنلاین: https://oversea.cnki.net/KCMS/detail/detail.aspx?dbcode=CMFD&dbname=CMFD201701&filename=1016294512.nh (در تاریخ 31 مه 20).
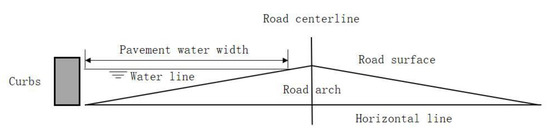
شکل 1. عرض آب روسازی. منبع: کد فنی برای پیشگیری و کنترل غرقابی شهری [ 6 ].
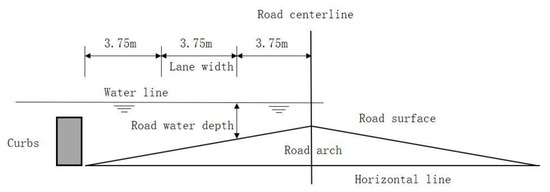
شکل 2. عمق آب جاده. منبع: کد فنی برای پیشگیری و کنترل غرقابی شهری [ 6 ].
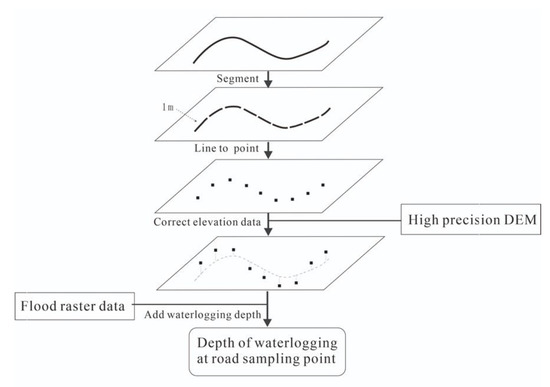
شکل 3. روش استخراج داده های غرقابی جاده بر اساس نقاط نمونه برداری.
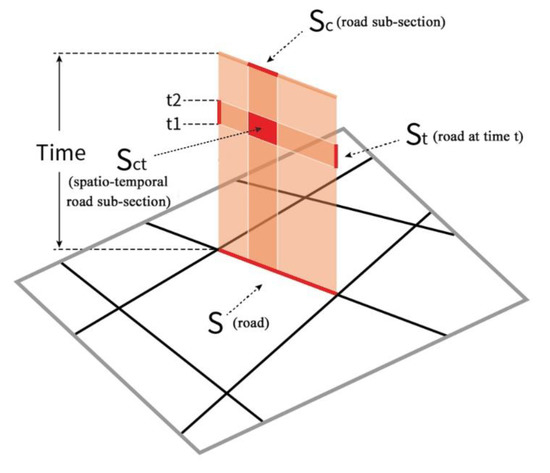
شکل 4. بخش فرعی جاده فضایی-زمانی (اقتباس از Ziwan Zheng [ 33 ]).
شکل 5. مدل محاسبه دانه بندی فضایی.
شکل 6. مدل محاسبه دانه بندی زمانی.
شکل 7. ساختار جاده با درجه های مختلف چند مقیاسی.
شکل 8. معماری عملکرد تجسم سیستم نمونه اولیه.
شکل 9. رابط سیستم نمونه اولیه.
شکل 10. عملکرد سلسله مراتب شبکه راه ها در مقیاس های مختلف.
شکل 11. عملکرد تقسیم بندی زیربخش فضایی در مقیاس های مختلف.
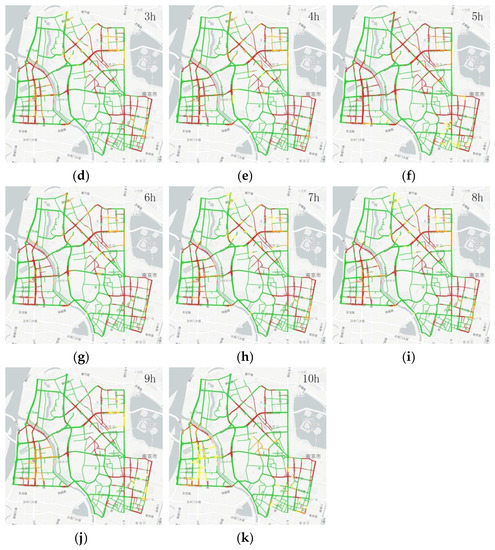
شکل 12. نمایش تجسم دینامیکی غرقابی جاده (0-10 ساعت).
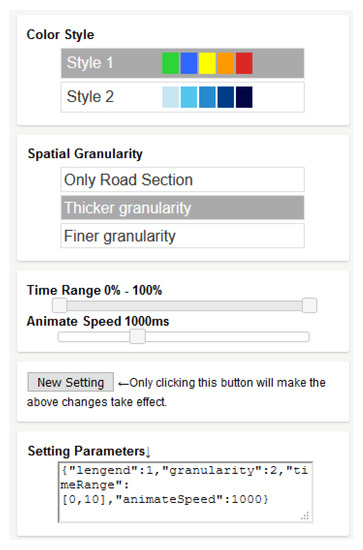
شکل 13. رابط تنظیم پارامتر.


بدون دیدگاه