

چکیده
کلید واژه ها:
تعمیم نقشه ; نمایش مقیاس پیوسته ; ساده سازی ساختمان ; ساختمان ها ; عملیات پیشرونده
1. مقدمه
2. آثار مرتبط
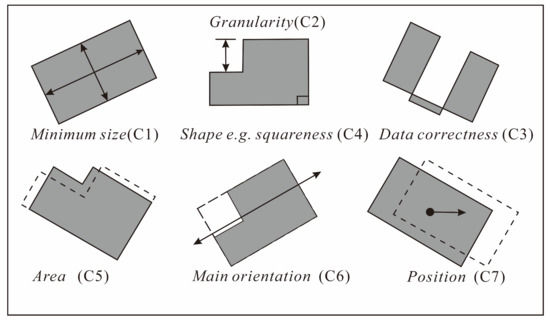
2.1. ایجاد محدودیت های ساده سازی
-
حداقل اندازه (C1): اندازه ساختمان باید به اندازه کافی بزرگ باشد تا قابل تفسیر باشد، به عنوان مثال، 0.5 میلی متر × 0.5 میلی متر در مقیاس متوسط [ 24 ]. گاهی اوقات می توان آن را به حداقل طول و عرض مستطیل مرزی ساختمان تبدیل کرد، به عنوان مثال، 0.7 میلی متر و 0.5 میلی متر در مقیاس های 1:25k تا 1:50k [ 7 ].
-
دانه بندی (C2): لبه های ساختمان باید به اندازه کافی بزرگ باشند تا از سردرگمی بصری جلوگیری شود، به عنوان مثال، 0.3 میلی متر [ 25 ].
-
صحت داده ها (C3): هیچ خطای داده مجاز نیست، به عنوان مثال، خود تقاطع [ 26 ].
-
شکل (C4): شکل ساختمان باید حفظ شود، به عنوان مثال، ویژگی های متعامد [ 27 ].
-
اندازه (C5): منطقه ساختمان باید حفظ شود [ 25 ].
-
جهت گیری (C6): جهت گیری اصلی ساختمان باید حفظ شود [ 28 ].
-
موقعیت (C7): ساختمان ساده شده باید نزدیک به موقعیت اصلی خود باشد [ 29 ].
2.2. رویکردهای ساده سازی ساختمان
3. روش شناسی
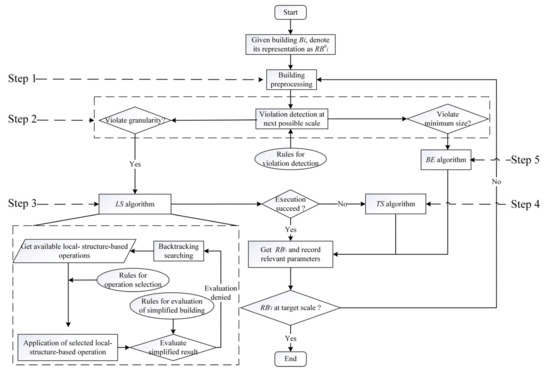
3.1. چارچوب
- مرحله 1.
-
پیش پردازش را برای حذف گره های غیرعادی احتمالی ساختمان ها قبل از اعمال هر گونه عملیات ساده سازی انجام دهید ( بخش 3.2 ).
- گام 2.
-
تشخیص تخلف در مقیاس احتمالی بعدی. نقض بر اساس اینکه آیا محدودیت های خوانایی در مقیاس ممکن بعدی نقض شده است یا خیر ( بخش 3.3 ) تعریف می شوند.
- مرحله 3.
-
اگر RB j i محدودیت های دانه بندی را در مقیاس ممکن بعدی نقض می کند، یک الگوریتم ساده سازی مبتنی بر ساختار محلی ( LS ) را اجرا کنید ( بخش 3.4 ). این الگوریتم ساختارهای محلی را طبقه بندی می کند و عملیات مبتنی بر آنها را تعریف می کند ( بخش 3.4.1 ). قوانینی که محدودیتهای حفظ را در نظر میگیرند که از کاربرد عملیات مبتنی بر ساختار محلی در مرحله فعلی پشتیبانی میکنند، ارائه شدهاند ( بخش 3.4.2 ). یک استراتژی جستجوی عقبگرد نیز در صورت اعمال یک عملیات مبتنی بر ساختار محلی نامعتبر ارائه می شود. اگر بتوان با LS نتیجه رضایت بخشی به دست آوردالگوریتم، بازگشت به مرحله 1. در غیر این صورت، به مرحله 4 بروید. اینکه آیا نتیجه رضایت بخش است یا خیر، بر اساس محدودیت های حفظ تعریف می شود ( بخش 3.4.3 ).
- مرحله 4.
-
اگر الگوریتم LS نمی تواند نتیجه رضایت بخشی به دست آورد، از یک الگوریتم ساده سازی مبتنی بر الگو ( TS ) استفاده کنید. سپس به مرحله 1 ( بخش 3.5 ) برگردید.
- مرحله 5.
-
اگر حداقل محدودیت اندازه در مقیاس ممکن بعدی نقض شود، از الگوریتم بزرگنمایی ساختمان ( BE ) استفاده کنید ( بخش 3.5 ).
3.2. مرحله 1: پیش پردازش ساختمان
3.3. مرحله 2: تعاریف نقض محدودیت خوانایی
دو نوع محدودیت خوانایی در بخش 2.1 تعریف شده است : حداقل اندازه و دانه بندی. محدودیت حداقل اندازه را می توان با حداقل مساحت ساختمان ( ST a ) تعیین کرد و گاهی اوقات می تواند به حداقل طول ( ST L ) و عرض ( ST W ) مستطیل مرزی آن تبدیل شود [ 7 ]. محدودیت دانه بندی بر حداقل طول ( GT L ) لبه های ساختمان حاکم است. ساختمان B i را در مقیاس 1 نمایش دهید: M j به عنوان B j i , مساحت آن به صورت AreaB j iطول و عرض حداقل مستطیل مرزی آن (MBR) به صورت LB j i و WB j i است و طول کوتاه ترین لبه آن به صورت MLe j i است. مقیاس های ممکن بعدی (1: M 1 j + 1 تا 1: M 4 j + 1 ) با در نظر گرفتن AreaB j i , LB j i , WB j i , و MLe j i از B j i به طور جداگانه می توانند به صورت معادلات محاسبه شوند. 1) – (4):
3.4. مرحله 3: الگوریتم ساده سازی مبتنی بر ساختار محلی
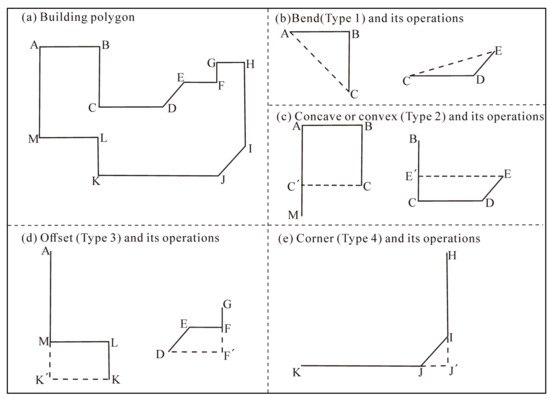
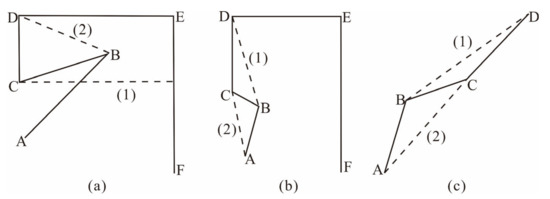
3.4.1. طبقه بندی ساختار محلی و عملیات مبتنی بر آنها
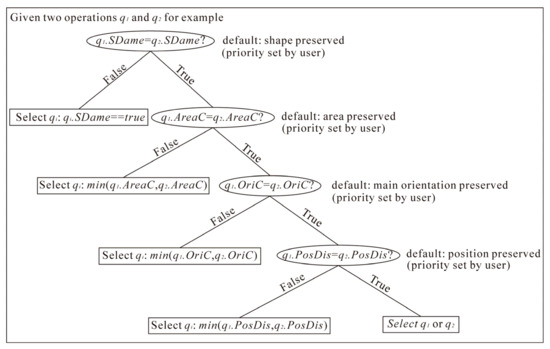
3.4.2. انتخاب عملیات مبتنی بر ساختار محلی کاربردی
3.4.3. ارزیابی و استراتژی عقب نشینی
-
قانون 1: اگر A r e a C>تیآآ�هآسی>تیآ، سپس نتیجه به دست آمده با اعمال q n رضایت بخش ارزیابی می شود.
-
قانون 2: اگر O r i C>تیo��منسی>تی�، سپس نتیجه به دست آمده با اعمال q n رضایت بخش ارزیابی می شود.
-
قانون 3: اگر پo s C>تیپپ�سسی>تیپ، سپس نتیجه به دست آمده با اعمال q n رضایت بخش ارزیابی می شود.
-
قانون 4: اگر ساختمان به دست آمده با اعمال عملیات انتخابی p n کمتر از چهار گره داشته باشد، آن را به عنوان نامطلوب ارزیابی می کنند.
با این حال، افزایش عمق ردیابی ممکن است امکان انتخاب ضعیف عملیات برای به دست آوردن نتایج رضایت بخش را افزایش دهد، که همچنین ممکن است به فضای جستجوی بزرگی منجر شود. بنابراین، حداکثر مرحله جستجو ( MaxS ) تنظیم می شود. بعلاوه، جستجوی بازگشتی باید زمانی خاتمه یابد که همه گزینه های موجود انتخاب شده باشند. استراتژی عقب نشینی مطابق شکل زیر انجام می شود.
| استراتژی عقب نشینی |
| ورودی: نمایش های به دست آمده از B i به عنوان R B S= {آرب1من،آرب2من, … ,آربk − 1من} ،k≥1آرباس=آرب1من،آرب2من،…،آربک-1من،ک≥1، عملیات موجود برای RB j i در RBS به عنوان Q j = {q1j, … ,qnj}س�=�1�،…،�n�; حداکثر مرحله جستجو به عنوان خروجی MaxS : RB k مرحله جستجو را به صورت p و تنظیم کنیدp = 0پ=0 دریافت Q j : مجموعه عملیات موجود Q j را بر اساس RB j i بدست آورید و با آن شروع کنیدj = k − 1�=ک-1 چه زمانی Q j ≠ n u l lس�≠�توللو p < M a x Sپ<MaxSو j ≥ 2�≥2، سپس انتخاب: یک عملیات q m j در Q j را بر اساس درخت تصمیم گیری باینری تعریف شده در بخش 3.4.2 برای به دست آوردن انتخاب کنید.R Bکمن، و اینکه آیا R Bکمن∈ R B SRBکمن، و چهRBکمن∈آرباسباید تعیین شود اگر R Bکمن∈ R B SRBکمن∈آرباس، q m j را در Q j بردارید ، اگر دیگر را ادامه دهیدR Bکمن∉ R B SRBکمن∉آرباس، سپس p = p + 1پ=پ+1 ارزیابی: تعیین اینکه آیا RB k i قوانین تعریف شده برای ساختمان ساده را برآورده می کند یا خیر: اگر ارزیابی پذیرفته شد، سپس به RB k i ، پایان برگردید. در غیر این صورت اگر ارزیابی رد شد، q m j را در Q j حذف کنید . چه زمانی Q j = n u l lس�=�توللو p < M a x Sپ<MaxSو j ≥ 2�≥2، سپس j = j − 1�=�-1، به Get Q j Else برگردید. |
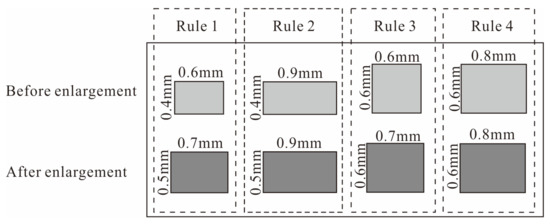
3.5. مراحل 4 و 5: ساده سازی مبتنی بر الگو و بزرگنمایی ساختمان
-
قانون 1: اگر B i ST a را در مقیاس ممکن بعدی نقض کند ، با جایگزین کردن آن با یک مستطیل به عنوان ST L × ST W بزرگ می شود.
-
قانون 2: اگر B i ST W را در مقیاس ممکن بعدی نقض کند ، با جایگزین کردن آن با یک مستطیل به عنوان LB i × ST W بزرگ می شود.
-
قانون 3: اگر B i ST L را در مقیاس ممکن بعدی نقض کند ، با جایگزین کردن آن با یک مستطیل به عنوان WB i × ST L بزرگ می شود.
-
قانون 4: اگر در مقیاس احتمالی بعدی تخلفی از محدودیت حداقل اندازه مشاهده نشود، بزرگنمایی ساختمان انجام نخواهد شد.
4. آزمایش کنید
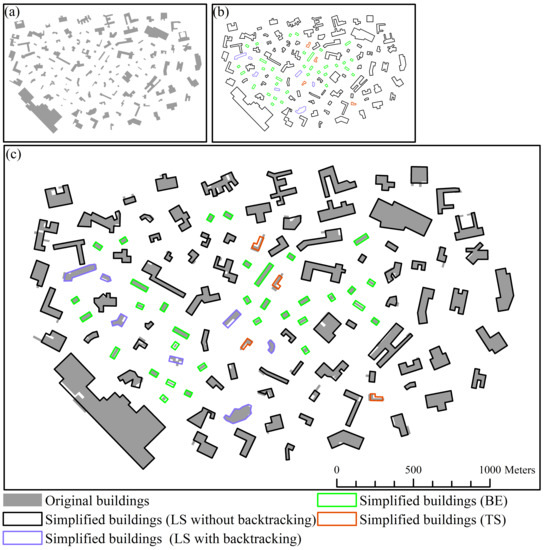
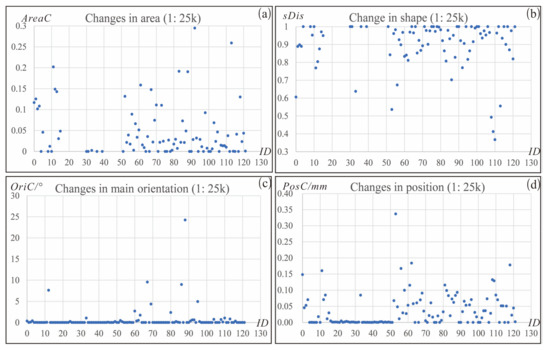
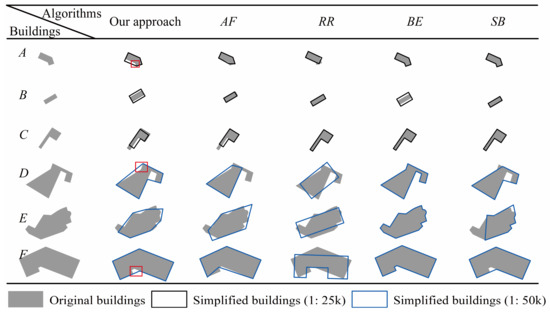
پارامترهای محدودیت خوانایی بر اساس بخش 2.1 و تعریف شده در بخش 3.3 به شرح زیر تنظیم شد: استیa = 0.35 متر متر2، استیL = 0.7 میلی متر ، S تیدبلیو= 0.5 میلی متر ، G T L = 0.3 میلی متر استیآ=0.35 مترمتر2،استی�=0.7 میلی متر،استیدبلیو=0.5 میلی متر،جیتی�=0.3 میلی متر. پارامترهای ارزیابی در الگوریتم LS به صورت زیر تنظیم شدند: A r e a C≤ 0.3 ، O r i C ≤30∘، پo s C≤ 0.5 میلی متر آreaسی≤0.3،OriC≤30درجه،پ�سسی≤0.5 میلی متر. ساختمان های مجموعه داده در مقیاس 1:25k ساده شدند ( شکل 8 ). هیچ انتخاب، تجمیع یا گونهسازی در آزمایشها وجود ندارد. تعداد ساختمان های ساده شده بر اساس الگوریتم های مختلف، همانطور که در جدول 3 نشان داده شده است. کیفیت داده های ساختمان های ساده شده در مقیاس های هدف با توجه به محدودیت های تعمیم شرح داده شده در بخش 2.1 ارزیابی شد. تمام ساختمانها در مقیاسهای هدف، پارامترهای کنترلی مجموعه محدودیتهای خوانایی را برآورده کردند. محدودیتهای حفاظتی با مقایسه تغییرات در ناحیه ( AreaC )، جهتگیری اصلی ( OriC ) و موقعیت ( PosC ) ساختمانها بین مقیاس اصلی و هدف، که در تعریف شدهاند، ارزیابی شد.جدول 2 ( شکل 9 ). علاوه بر این، تغییر شکل نیز بر اساس فاصله سطح ( sDis ) با توجه به Yan et al. [ 6 ] همانطور که در رابطه (5) ( شکل 9 ).
جایی که A r e a ( B o ∩ B s )آ�هآ(ب�∩بس)منطقه تقاطع ساختمان های Bo و Bs است و A r e a ( B o ∪ B s )آ�هآ(ب�∪بس)منطقه اتحاد ساختمان های Bo و Bs است. از آنجایی که ساختمان هایی که محدودیت حداقل اندازه را نقض می کنند در رویکرد ما بزرگ می شوند، این ممکن است منجر به تغییر بزرگی در مساحت و شکل شود. بنابراین، تغییرات در مساحت و شکل برای ساختمان های بزرگ شده در مقیاس هدف مقایسه نشد. همانطور که در شکل 9 نشان داده شده است ، AreaC تقریباً در 0.10، OriC در 5 درجه، PosC در 0.2 میلی متر و s Dis در 0.8 کنترل می شود. بزرگترین AreaC 0.295، بزرگترین OriC 24.2 درجه و بزرگترین PosC 0.340 میلی متر است. همه این تغییرات در پارامترهای مجموعه کنترل می شوند ( A r e a C≤ 0.3 ، O r i C ≤30∘، پo s C≤ 0.5 میلی متر آreaسی≤0.3،OriC≤30درجه،پ�سسی≤0.5 میلی متر) برای الگوریتم LS . علاوه بر این، sDis برای چندین ساختمان پس از سادهسازی کمتر از 0.6 در شکل 9 است، زیرا آنها با الگوریتم TS در رویکرد ما سادهسازی شدهاند.
5. بحث
5.1. مقایسه ها
5.2. استفاده ممکن برای تغییر مقیاس مداوم ساختمان ها
5.3. محدودیت ها
6. نتیجه گیری
منابع
- لی، دی. ابزارهای جدید تعمیم نقشه برداری. در مجموعه مقالات نوزدهمین کنفرانس بین المللی کارتوگرافی ICA، اتاوا، ON، کانادا، 14 تا 21 اوت 1999. ص 1235–1242. [ Google Scholar ]
- Sester, M. تعمیم بر اساس تعدیل حداقل مربعات. بین المللی قوس. فتوگرام Remote Sens. 2000 , XXXIII , 931–938. [ Google Scholar ]
- آی، تی. چنگ، ایکس. لیو، پی. یانگ، ام. تحلیل شکل و تطبیق الگوی ویژگیهای ساختمان با روش تبدیل فوریه. محاسبه کنید. محیط زیست سیستم شهری 2013 ، 41 ، 219-233. [ Google Scholar ] [ CrossRef ]
- بورگاردت، دی. اشمید، اس. ارزیابی مبتنی بر محدودیت نقشه های توپوگرافی تعمیم یافته خودکار و دستی. در کارتوگرافی در اروپای مرکزی و شرقی ; Springer: برلین، هایدلبرگ، 2009; صص 147-162. [ Google Scholar ]
- رینفورد، دی. Mackaness، W. تطبیق الگو در حمایت از تعمیم ساختمان های روستایی. در پیشرفتها در مدیریت دادههای فضایی، مجموعه مقالات دهمین سمپوزیوم بینالمللی در مورد مدیریت دادههای مکانی، اتاوا، ON، کانادا، 9 تا 12 ژوئیه . Richardson, DE, Van O, P., Eds. Springer: برلین/هایدلبرگ، آلمان، 2002; صص 137-151. [ Google Scholar ]
- یان، ایکس. آی، تی. Zhang، X. روش تطبیق و سادهسازی الگو برای ساخت ویژگیها بر اساس شناخت شکل. بین المللی J. Geo Inf. 2017 ، 6 ، 250. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وانگ، ال. گوا، کیو. لیو، ی. سان، ی. Wei, Z. انتخاب ساختمان متنی بر اساس الگوریتم ژنتیک در تعمیم نقشه. بین المللی J. Geo Inf. 2017 ، 6 ، 271. [ Google Scholar ] [ CrossRef ]
- Guo, Q. روش ساده سازی گرافیکی مرز ویژگی منطقه به عنوان زاویه راست. Geomat. Inf. علمی دانشگاه ووهان 1999 ، 24 ، 255-258. [ Google Scholar ]
- Sester, M. رویکردهای بهینه سازی برای تعمیم و انتزاع داده ها. بین المللی جی. جئوگر. Inf. علمی 2005 ، 19 ، 871-897. [ Google Scholar ] [ CrossRef ]
- چن، دبلیو. لانگ، ی. شن، جی. لی، دبلیو. شناخت سازه و پیشرونده مقعرهای پس از آن چند ضلعی ساختمان بر اساس D-Tin محدود. Geomat. Inf. علمی دانشگاه ووهان 2011 ، 36 ، 584-587. [ Google Scholar ]
- چنگ، بی. لیو، کیو. لی، ایکس. وانگ، ی. ساده سازی ساختمان با استفاده از شبکه های عصبی پس انتشار: ترکیبی از تخصص نقشه نگاران و ادراک محلی مبتنی بر شطرنجی. GISci. Remote Sens. 2013 , 50 , 527–542. [ Google Scholar ] [ CrossRef ]
- بوچین، ک. میلمنز، دبلیو. Renssen، AV; Speckmann, B. سادهسازی حفظ منطقه و طرحوارهسازی زیربخشهای چندضلعی. ACM Trans. تف کردن سیستم الگوریتم 2016 ، 2 ، 1-36. [ Google Scholar ] [ CrossRef ]
- Oosterom، PV; Meijers, M. ساختارهای داده در مقیاس Vario که از زوم صاف و انتقال پیشرونده داده های دو بعدی و سه بعدی پشتیبانی می کنند. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 455-478. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هوانگ، ال. آی، تی. Oosterom، PV; یان، ایکس. یانگ، ام. ساختاری مبتنی بر ماتریس برای نمایش برداری در مقیاس متغیر در طیف گسترده ای از مقیاس های نقشه: مورد داده های شبکه رودخانه. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 218. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پنگ، دی. Touya, G. تعمیم مستمر ساختمانها به مناطق ساخته شده با تجمیع و رشد. در UrbanGIS’17: 3rd ACM SIGSPATIAL Workshop on Smart Cities and Urban Analytics، 7–10 نوامبر 2017، Redondo Beach، CA، USA . ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2017؛ 8p. [ Google Scholar ]
- شن، ی. آی، تی. لی، سی. ساده سازی ساختمان های شهری برای حفظ ویژگی های هندسی با استفاده از تقسیم بندی سوپرپیکسلی. بین المللی J. Appl. رصد زمین. Geoinf. 2019 ، 79 ، 162-174. [ Google Scholar ] [ CrossRef ]
- وانگ، ز. لی، دی. ساده سازی ساختمان بر اساس تشخیص الگو و تجزیه و تحلیل شکل. در مجموعه مقالات نهمین سمپوزیوم بین المللی در مورد مدیریت داده های فضایی، پکن، چین، 10-12 اوت 2000. صص 58-72. [ Google Scholar ]
- اشتاینیگر، اس. Taillandier، P. Weibel, R. استفاده از تشخیص بافت شهری و یادگیری ماشین برای بهبود تعمیم ساختمان ها. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 253-282. [ Google Scholar ] [ CrossRef ]
- Ruas، A. Modèle de Généralisation de Données Géographiques à Base de Contraintes et d’autonomie. Ph.D. پایان نامه، Sciences de l’Information G´eographique، Marne La Vallee، فرانسه، 1999. [ Google Scholar ]
- دوچن، سی. کریستف، اس. Ruas، A. تعمیم، مشخصات نماد و ارزیابی نقشه: بازخورد از تحقیقات انجام شده در آزمایشگاه COGIT، IGN فرانسه. بین المللی جی دیجیت. Earth 2011 , 4 (Suppl. S1), 25–41. [ Google Scholar ] [ CrossRef ]
- دوچن، سی. رواس، ع. کریستف، سی. مدل CartACom: تبدیل ویژگی های نقشه برداری به عوامل ارتباطی برای تعمیم نقشه برداری. کارتوگر. Geogr. Inf. سیستم 2012 ، 26 ، 1533-1562. [ Google Scholar ] [ CrossRef ]
- مودت، ا. تویا، جی. دوچن، سی. Picault، S. DIOGEN، یک مدل چند سطحی جهت تعمیم کارتوگرافی. بین المللی جی. کارتوگر. 2017 ، 3 ، 121-133. [ Google Scholar ] [ CrossRef ]
- وانگ، ال. گوا، کیو. وی، ز. لیو، ی. حل تعارض فضایی در یک فرآیند چند عاملی با استفاده از مدل مار. دسترسی IEEE 2017 ، 5 ، 24249–24261. [ Google Scholar ] [ CrossRef ]
- استوتر، جی. اسمالن، جی. بیکر، ن. هاردی، پی. تعیین الزامات نقشه برای تعمیم خودکار داده های توپوگرافی. کارتوگر. J. 2009 , 46 , 214-227. [ Google Scholar ] [ CrossRef ]
- Regnauld، N. نوع سازی ساختمان متنی در تعمیم خودکار نقشه. الگوریتمیکا 2001 ، 30 ، 312-333. [ Google Scholar ] [ CrossRef ]
- خو، دبلیو. لانگ، ی. ژو، تی. Chen, L. ساده سازی چند ضلعی ساختمان بر اساس روش چهار نقطه ای مجاور. Acta Geod. کارتوگر. گناه 2013 ، 42 ، 929-936. [ Google Scholar ]
- لخت، من. Touya, G. افزایش ردپای ساختمان با عملیات مربع سازی. جی. اسپات. Inf. علمی 2016 ، 13 ، 33-60. [ Google Scholar ] [ CrossRef ]
- دوچن، سی. بارد، اس. Barillot, X. توصیف کمی و کیفی جهت گیری ساختمان. در مجموعه مقالات پنجمین کارگاه آموزشی در مورد پیشرفت در تعمیم خودکار نقشه، پاریس، فرانسه، 28 تا 30 آوریل 2003. [ Google Scholar ]
- لیو، ی. گوا، کیو. سان، ی. Ma، X. یک رویکرد ترکیبی برای جابجایی نقشهبرداری برای ساختمانها بر اساس اسکلت و الگوریتم تیر الاستیک بهبودیافته. PLoS ONE 2014 ، 9 ، e113953. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- ژانگ، ایکس. استوتر، جی. آی، تی. کراک، ام.-جی. Molenaar, M. ارزیابی خودکار ترازهای ساختمان در نقشه های تعمیم یافته. بین المللی جی. جئوگر. Inf. علمی 2013 ، 27 ، 1550-1571. [ Google Scholar ] [ CrossRef ]
- Bayer, T. ساده سازی خودکار ساختمان با استفاده از رویکرد بازگشتی. در کارتوگرافی در اروپای مرکزی و شرقی ; Gartner, G., Ortag, F., Eds. Springer: برلین، هایدلبرگ، 2009; صص 121-146. [ Google Scholar ]
- دیمن، جی. ون کرولد، ام. Spaan، B. تعمیم ساختمان با کیفیت بالا با گسترش عملگرهای مورفولوژیکی. در مجموعه مقالات دوازدهمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، مونپلیه، فرانسه، 20 تا 21 ژوئن 2008. [ Google Scholar ]
- Meijers, M. ساده سازی ساختمان با استفاده از منحنی های افست به دست آمده از اسکلت مستقیم. در مجموعه مقالات نوزدهمین کارگاه ICA در مورد تعمیم و بازنمایی چندگانه، هلسینکی، فنلاند، 14 ژوئن 2016. [ Google Scholar ]
- Kada، M. تجمع ساختمانهای سه بعدی با استفاده از رویکرد داده ترکیبی. کارتوگر. Geogr. Inf. سیستم 2011 ، 38 ، 153-160. [ Google Scholar ] [ CrossRef ]
- وی، ز. او، جی. وانگ، ال. وانگ، ی. Guo, Q. رویکرد جابجایی مشارکتی برای تعارضات فضایی در تعمیم نقشه ساختمان شهری. IEEE Access 2018 . [ Google Scholar ] [ CrossRef ]
- فن، اچ. اسکندر، ز. وو، اچ. تشخیص ساختارهای تکراری بر روی ردپای ساختمان برای اهداف مدلسازی و بازسازی سه بعدی. بین المللی جی دیجیت. زمین 2017 ، 10 ، 785–797. [ Google Scholar ] [ CrossRef ]
- شن، ی. آی، تی. او، Y. یک رویکرد جدید برای ساده سازی خط بر اساس پردازش تصویر: مطالعه موردی مرزهای منطقه آب. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 41. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Taillandier، P. دوچن، سی. Drogoul، A. بازنگری خودکار قوانین مورد استفاده برای هدایت فرآیند تعمیم در سیستم ها بر اساس استراتژی آزمون و خطا. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 1971-1999. [ Google Scholar ] [ CrossRef ]
- یانگ، م. یوان، تی. یان، ایکس. آی، تی. جیانگ، سی. یک رویکرد ترکیبی برای ساده سازی ساختمان با یک ارزیاب از یک شبکه عصبی پس انتشار. بین المللی جی. جئوگر. Inf. علمی 2021 . [ Google Scholar ] [ CrossRef ]
- اداره ملی نقشه برداری، نقشه برداری و اطلاعات جغرافیایی چین. مشخصات تلفیقی برای نقشههای مقیاس بنیادی ملی-بخش 1: مشخصات تلفیقی برای نقشههای توپوگرافی 1:25000، 1:50000 و 1:100000 . انتشارات China Zhijian: پکن، چین، 2008.
- بررسی مهمات. OS OPEN MAP-LOCAL: راهنمای محصول و مشخصات فنی. 2016. در دسترس آنلاین: https://www.ordnancesurvey.co.uk/documents/os-open-map-local-product-guide.pdf (در 21 اکتبر 2020 قابل دسترسی است).


بدون دیدگاه