

خلاصه
داده ها و برنامه های کاربردی شهرهای هوشمند باید تا حد امکان صادقانه وضعیت شهر را تکرار کنند و آینده های جایگزین احتمالی را شبیه سازی کنند. برای انجام این کار، مدل سازی شهر باید تمام جنبه های شهر را که مربوط به مشکلاتی است که نیاز به راه حل های هوشمند دارند، پوشش دهد. در این زمینه، دادههای فضایی دوبعدی و سهبعدی، بهویژه مدلهای سه بعدی شهر، نقش کلیدی دارند. یکی از روشهای جمعآوری دادهها که میتواند برای توسعه چنین مدلهای سه بعدی شهری مورد استفاده قرار گیرد، تشخیص نور و محدوده (LiDAR) است، فناوری که فرصتهایی را برای تولید مدلهای شهر سه بعدی در مقیاس بزرگ با هزینه نسبتا کم فراهم کرده است. دادههای جمعآوریشده بیشتر پردازش میشوند تا مدلهای شهر مجازی سهبعدی فوتورئالیستی کاملاً توسعهیافته را به دست آورند. هدف این تحقیق توسعه مدل شهر سه بعدی مجازی مبتنی بر نقشه برداری LiDAR در هوا و تحلیل کاربرد آن در برنامه های شهرهای هوشمند است. در این مقاله، ما جریان کاری را ارائه میکنیم که از جمعآوری دادهها توسط LiDAR، از طریق تبدیلهای استخراج، تبدیل، بارگذاری (ETL) و پردازش دادهها به توسعه مدل شهر مجازی سه بعدی میرود و در نهایت سناریوهای استفاده بالقوه آینده آن را در زمینههای مختلف کاربردی مانند مدرن مورد بحث قرار میدهیم. برنامه ریزی شهری مبتنی بر فناوری اطلاعات و ارتباطات و کاداستر سه بعدی. نتایج در مطالعه موردی منطقه پردیس دانشگاه نووی ساد ارائه شده است. بارگذاری (ETL) تحولات و پردازش داده ها برای توسعه مدل شهر مجازی سه بعدی و در نهایت سناریوهای استفاده بالقوه آینده آن در زمینه های مختلف کاربردی مانند برنامه ریزی شهری مبتنی بر فناوری اطلاعات و ارتباطات مدرن و کاداستر سه بعدی. نتایج در مطالعه موردی منطقه پردیس دانشگاه نووی ساد ارائه شده است. بارگذاری (ETL) تحولات و پردازش داده ها برای توسعه مدل شهر مجازی سه بعدی و در نهایت سناریوهای استفاده بالقوه آینده آن در زمینه های مختلف کاربردی مانند برنامه ریزی شهری مبتنی بر فناوری اطلاعات و ارتباطات مدرن و کاداستر سه بعدی. نتایج در مطالعه موردی منطقه پردیس دانشگاه نووی ساد ارائه شده است.
کلید واژه ها:
مدل های سه بعدی شهر مجازی ; CityGML ; برنامه های کاربردی شهرهای هوشمند ; LiDAR
1. معرفی
مفهوم شهر هوشمند فناوری اطلاعات و ارتباطات (ICT) و دستگاهها و حسگرهای فیزیکی مختلف متصل به شبکه اینترنت اشیاء (IoT) را برای بهینهسازی کارایی خدمات شهری و اتصال بهتر به شهروندان یکپارچه میکند [1 ] . فناوری مربوط به شهر هوشمند به مقامات شهری اجازه می دهد تا با جامعه و زیرساخت های شهر تعامل داشته باشند و بر آنچه در شهر اتفاق می افتد، چگونگی تحول شهر و اقدامات لازم برای بهبود کیفیت خدمات شهری نظارت کنند. برای این منظور از فناوری اطلاعات و ارتباطات استفاده می شود. بسیاری از برنامههای کاربردی شهر هوشمند برای مدلسازی و مدیریت جریانهای شهری و امکان پاسخگویی به چالشها در زمان واقعی توسعه یافتهاند. با این حال، این اصطلاح به خودی خود نسبت به مشخصات آن نامشخص است و بنابراین برای تفسیرهای زیادی باز است [2 ]، و برنامه های کاربردی ممکن است. با این وجود، یک چیز قطعی است و آن اینکه شهرهای هوشمند شامل استفاده از فناوریهای مدرن ICT در همه زمینههای کاربردی هستند.
با توجه به اینکه شهرهای هوشمند مستلزم سیستمهای توزیعشده پیچیده هستند که ممکن است چندین ذینفع، برنامهها، حسگرها و دستگاههای اینترنت اشیا را درگیر کنند، زیرساخت دادههای مکانی میتواند نقش مهمی در ایجاد قابلیت همکاری بین سیستمها و پلتفرمها ایفا کند تا بتوان از چنین دادههای ناهمگنی استفاده کرد. [ 3 ]. بر اساس استانداردهای باز و بینالمللی کنسرسیوم فضایی باز (OGC) [ 4 ]، امکان توسعه زیرساخت دادههای مکانی که حسگرهای مختلف، دستگاههای اینترنت اشیا، ابزارهای شبیهسازی و مدلهای شهر سهبعدی را در چارچوب عملیاتی مشترک یکپارچه میکند، وجود دارد. برای این منظور، کنسرسیوم فضایی باز گروه کاری دامنه شهرهای هوشمند [ 5] را تشکیل داده است.] که نقش آن اجرای فعالیتها و استانداردهای OGC در محیط شهرهای هوشمند برای رسیدگی به مسائلی مانند کارایی انرژی، آلودگی، مدیریت زباله و بازیافت، استفاده از زمین و سایر منابع و تضمین پایداری منابع برای نسلهای آینده است. هدف این است که با استفاده از دادههای مشترک و مدلهای پردازش، قابلیت همکاری بین برنامههای کاربردی مختلف را فراهم کند و انتقال روان و جریانهای فرآیندی را که شامل نظارت، برنامهریزی، اجرای تغییرات و نگهداری سیستمهای موجود میشود، فعال کند.
داده ها و برنامه های کاربردی شهرهای هوشمند باید تا حد امکان صادقانه وضعیت شهر را تکرار کنند و آینده های جایگزین احتمالی را شبیه سازی کنند. برای انجام این کار، مدل سازی شهر باید تمام جنبه های شهر را که مربوط به مشکلاتی است که نیاز به راه حل های هوشمند دارند، پوشش دهد. جنبههای مهم مدلسازی عبارتند از: شبکهها و جریانهایی که میتوانند تمام حرکتها را در شهر توصیف کنند. مدلهای ساختمان و تأسیسات (تاریخی، حال و آینده)، شامل تمام جنبههایی که میتواند بر شهر، محیط آن، شهروندان و فعالیتهای آنها تأثیر بگذارد، قادر به پشتیبانی از برنامهریزی و نگهداری از طریق جنبههای چهاربعدی (سهبعدی و زمانی) برنامهریزی شهری، کاداستر، عوامل محیطی و غیره
هدف شهرهای هوشمند مدیریت کارآمد شهرنشینی رو به رشد، مصرف انرژی، حفظ محیط سبز، بهبود استانداردهای اقتصادی و زندگی شهروندان و ارتقای توانمندی های مردم برای استفاده کارآمد و اتخاذ فناوری اطلاعات و ارتباطات مدرن (ICT) است. در مفهوم شهرهای هوشمند، ICT نقشی حیاتی در طراحی سیاست، تصمیم گیری، اجرا و خدمات مولد نهایی ایفا می کند [ 6 ].
ادغام تمام سیستم های هوشمند (مانند خانه هوشمند، پارکینگ هوشمند و غیره) و دستگاه های اینترنت اشیا (مانند حسگرها، محرک ها و گوشی های هوشمند) در شهر می تواند نقشی حیاتی در توسعه خدمات شهری با ساخت دیجیتال شهر خود ایفا کند. و باهوش تر با این حال، اتصال تعداد زیادی از اشیاء اینترنت اشیا برای جمعآوری دادههای شهری از طریق اینترنت برای راهاندازی یک شهر دیجیتال هوشمند، بر حجم وسیعی از تولید دادهها که به آن Big Data گفته میشود، تأثیر میگذارد. بنابراین، ادغام دستگاههای IoT و سیستمهای هوشمند به منظور جمعآوری و پردازش چنین حجم عظیمی از دادههای شهری در زمان واقعی به شیوهای مؤثر با هدف ایجاد یک شهر دیجیتال هوشمند، یک کار چالش برانگیز است [7] .]. در هسته شهر هوشمند، حسگرها و محرکهای تعبیهشده در دستگاههای هوشمند قرار دارند که محیط را برای تسهیل تصمیمگیری مؤثر حس میکنند. این شامل ادغام چندین فناوری اطلاعات و ارتباطات مانند هوش مصنوعی، پروتکلها، اینترنت اشیا (IoT)، شبکه حسگر بیسیم (WSN) و غیره است [ 8 ]. متأسفانه، دستاوردهای کنونی در شهر هوشمند در اروپای جنوب شرقی، در بیشتر موارد نظری است و تجربی نیست. موضوعاتی که بیشتر مورد تحقیق قرار گرفته، حکمرانی هوشمند و محیط هوشمند [ 9 ] است.
نیاز به استانداردهای شهرهای هوشمند در محیط OGC به چهار حوزه مختلف طبقهبندی میشود: (1) دادهها/دادههای مکانی، (2) سیاست و حاکمیت، (3) پلتفرمهای اشتراکگذاری داده، و (4) برنامهها، خدمات و راهحلها. در این راستا، یکی از اهداف عمده، جمع آوری داده های مکانی و غیر مکانی مرتبط است که محدوده شهر را پوشش می دهد. برای این منظور، OGC مجموعه ای از استانداردها را برای نمایش داده های جغرافیایی دو بعدی و سه بعدی ایجاد کرده است که می تواند از توسعه زیرساخت داده های مکانی در سطح شهر برای برنامه های شهرهای هوشمند پشتیبانی کند. CityGML [ 10 ] و IndoorGML [ 11] استانداردهایی هستند که با اطلاعات سه بعدی فضای باز و داخلی سروکار دارند. آنها مدلهای معنایی هستند که میتوانند به ساخت پایگاه داده شهر سه بعدی کمک کنند که میتواند بیشتر گسترش یابد و به مجموعه دادههای سازمانهای مرتبط دیگر مانند شهرسازی یا کاداستر پیوند داده شود. مدل CityGML در آماده سازی برای انتشار CityGML نسخه 3.0 [ 12 ] به طور کامل بازنگری شده است تا نیاز روزافزون به قابلیت همکاری بهتر با سایر استانداردهای مرتبط در این زمینه را منعکس کند [ 13 ]. CityGML 3.0 نگاشت عناصر سازنده از مجموعه داده های مدل سازی اطلاعات ساختمان (BIM) ارائه شده در استاندارد IFC را بر روی CityGML فعال می کند. به طور کلی، CityGML 3 برای رفع بهتر نیازهای شهرهای هوشمند و برنامه های کاربردی اینترنت اشیا طراحی شده است.
از نظر موقعیت مکانی، داده ها می توانند پیوسته یا مقوله ای باشند. داده های پیوسته برای هر نقطه از فضای جغرافیایی مورد علاقه مانند توپوگرافی تعریف می شود. داده های طبقه بندی شامل اشیاء با مرز می شود. آنها با نقاط، خطوط و چند ضلعی نشان داده می شوند. موقعیت مکانی اشیاء جغرافیایی با استفاده از دو روش جمع آوری داده اولیه تعیین می شود. اولین مورد اندازهگیریهای میدانی، عمدتاً نقشهبرداری زمین، موقعیتیابی سیستم ماهوارهای ناوبری جهانی (GNSS) و تشخیص نور و محدوده (LiDAR) است [ 14 ].
یکی از روشهای جمعآوری دادههایی که میتوان برای توسعه چنین مدلهای سه بعدی شهری استفاده کرد، تشخیص نور و محدوده (LiDAR) است. LiDAR یک فناوری سنجش از دور مدرن است و کاربردهای خود را در بسیاری از مناطق مختلف پیدا می کند. یکی از آنها مدلسازی سه بعدی شهر است، با توجه به اینکه می تواند حجم وسیعی از داده ها را در مدت زمان کوتاهی جمع آوری کند. با پیشرفتهای فناوری LiDAR هوابرد، میتوان توپوگرافی شهری را با وضوح فضایی و دانهبندی بیسابقه مدلسازی کرد و ویژگیهای قبلاً در دسترس ساختمانهای فردی را استخراج کرد [ 15 ]. علاوه بر این، این فناوری همچنین فرصت هایی را برای تولید مدل های شهر سه بعدی در مقیاس بزرگ با هزینه کم فراهم کرده است [ 16]]. دادههای جمعآوریشده برای به دست آوردن مدلهای شهر سهبعدی فوتورئالیستی کاملاً توسعهیافته بیشتر پردازش میشوند. این فرآیند را می توان با استفاده از رویکردهای یادگیری ماشینی مانند روش های طبقه بندی ابر نقطه ای [ 16 ، 17 ] خودکار کرد. تصاویر هوایی نوری را می توان با یک ابر نقطه LiDAR برای تولید مدل های شهر فوتورئالیستی ترکیب کرد [ 18 ].
هدف این تحقیق توسعه مدل شهر سه بعدی مجازی به عنوان پایه ای برای زیرساخت داده های فضایی سه بعدی است که از برنامه های کاربردی شهر هوشمند پشتیبانی می کند و چارچوبی کلی برای ادغام مجموعه داده های مختلف مربوط به محیط شهری و خدمات شهری، فراتر از تجسم سه بعدی صرف، فراهم می کند. هدف توسعه یک مطالعه موردی مبتنی بر بررسی LiDAR، ابرهای نقطهای، تبدیلهای ETL و توسعه مدلهای شهری سه بعدی مجازی و پایگاه داده شهر سه بعدی است که به کاربران اجازه میدهد از این مدلها برای تجزیه و تحلیل بیشتر و وظایف تجسم در انواع مختلف استفاده کنند. حوزه های کاربردی مانند برنامه ریزی شهری، کاداستر، مدیریت تاسیسات، شبیه سازی های محیطی، میراث فرهنگی، ناوبری داخلی یا خارجی.
ساختار مقاله به شرح زیر است. پس از مقدمه، پیشینه نظری و کارهای مربوط به مدل های سه بعدی شهر و استانداردهای CityGML و همچنین حوزه کاربرد آنها در بخش 2 آورده شده است . بخش 3 روش های پیمایشی مورد استفاده برای توسعه مدل شهر سه بعدی منطقه مورد مطالعه (منطقه پردیس دانشگاه نووی ساد، قلعه پترووارادین نزدیک و بخشی از مرکز شهر) را توصیف می کند. بخش 4 نتایج چنین توسعه و تغییر طرحواره را ارائه می دهد. بحث در مورد کاربردهای احتمالی و پیشرفت های آینده مدل شهر سه بعدی در بخش 5 ارائه شده است. در این بحث، تمرکز اصلی بر کاربردهای حوزه شهرسازی و کاداسترهای سه بعدی به عنوان یکی از حوزه هایی است که می تواند از چنین پیشرفت هایی بهره فراوان برد. با این حال، اینها به هیچ وجه تنها مناطقی نیستند که می توان از چنین مدل هایی استفاده کرد. نتیجه گیری پس از آن ارائه می شود.
2. پیشینه نظری و کارهای مرتبط
2.1. CityGML
CityGML استاندارد بین المللی کنسرسیوم فضایی باز (OGC) برای ارائه و مبادله مدل های سه بعدی شهر است. هندسه سه بعدی، توپولوژی، معناشناسی و ظاهر مرتبط ترین اشیاء توپوگرافی را در زمینه های شهری یا منطقه ای تعریف می کند. این تعاریف در سطوح مختلف و کاملاً تعریف شده از جزئیات ارائه شده است (مدل چند وضوح).
شبیه به داده های فضایی دوبعدی سنتی تر، مدل های شهر سه بعدی تقریبی از دنیای واقعی را نشان می دهند. کمیت و محتوای یک مدل شهر ارتباط مستقیمی با استفاده از مدل سه بعدی دارد. مقدار جزئیات در یک مدل سه بعدی، از نظر هندسه و ویژگیها، معمولاً به عنوان سطح جزئیات (LoD) شناخته میشود، که توضیح میدهد که چگونه شی فضایی به طور کامل مدلسازی شده است. LoD یک مفهوم در GIS و مدل سازی سه بعدی شهر است. مفهوم LoD در هر مرحله از توسعه مدل شهر سه بعدی مهم است، حتی قبل از انجام هر گونه جمع آوری داده [ 19 ]. به گفته گروگر و همکاران. [ 20]، یک مدل LoD0 به سادگی یک مدل زمین دیجیتال 2.5 بعدی است که یک نقشه دو بعدی با زمین سه بعدی است. مدل های LoD1 مدل های جعبه ساده هستند. مدل های LoD2 ساختار سقف را به مدل های LoD1 اضافه می کنند. مدل های LoD3 دارای ویژگی های بیرونی دقیق هستند، مانند دهانه ها و سازه های دیوار. مدل های LoD4 پیچیده ترین مدل ها با ویژگی های داخلی ساختمان هستند. با این حال، LOD4 که برای نمایش فضای داخلی اشیا (مانند مدلسازی داخلی ساختمانها) در CityGML 2.0 استفاده میشود، که استاندارد فعلی منتشر شده در لحظه نگارش این مقاله است، انتظار میرود از CityGML 3.0 اعلامشده حذف شود. . در عوض، فقط LOD های 0/1/2/3 باقی می مانند و فضای داخلی اشیا با LOD های 0/1/2/3 یکپارچه بیان می شود [ 13 ].
علاوه بر این، CityGML از پسوندهای دامنه برنامه (ADE) پشتیبانی می کند که در آن کاربران می توانند پسوندهای خود را برای برنامه های خاص خود ایجاد کنند. LoD های مختلف و پسوندهای دامنه کاربردی (ADE) می توانند حوزه کاربرد CityGML را گسترش دهند که در بسیاری از تحقیقات نشان داده شده است [ 21 ، 22 ، 23 ، 24 ، 25 ، 26 ، 27 ].
هدف CityGML تعریف موجودیتها، ویژگیها و روابط اصلی مدلهای شهر سه بعدی است. CityGML کلاس های شی مدل شهر را تعریف می کند که در بسیاری از برنامه ها به عنوان مورد نیاز یا مرتبط شناسایی می شوند. CityGML همچنین شامل LoD های مختلفی است که به مفاهیم مختلف ساختمان ها، GIS و BIM اجازه می دهد تا به یک مدل داده جامع ملحق شوند [ 28 ].
CityGML امکان تعامل معنایی و شماتیک مدل های شهر سه بعدی را در زیرساخت داده های مکانی فراهم می کند. این نشان دهنده پایگاهی برای تبادل داده بین سیستم های اطلاعات جغرافیایی مختلف بدون افت کیفیت یا کمیت داده است [ 10]]. جنبه های قابلیت همکاری با سایر مدل های فنی مانند LADM، INSPIRE، یا IFC مورد توجه ویژه CityGML 3.0 آینده است. در همین راستا یک مفهوم فضایی در CityGML 3.0 معرفی شده است. فضا موجودیتی با وسعت حجمی در دنیای واقعی است. فضاها بیشتر به فضاهای فیزیکی و فضاهای منطقی تقسیم می شوند. فضاهای فیزیکی فضاهایی هستند که به طور کامل یا جزئی توسط اشیاء فیزیکی محدود می شوند، در حالی که فضاهای منطقی می توانند با مرزهای غیر فیزیکی و مجازی نیز محصور شوند و می توانند مجموعه ای از فضاهای فیزیکی را نشان دهند (مثلاً یک آپارتمان به عنوان یک فضای منطقی از چندین فضای فیزیکی تشکیل شده است. – اتاق ها). این مفهوم فضایی می تواند به عنوان پایه ای برای ادغام با LADM و IndoorGML استفاده شود. ماژول ساخت و ساز جدید به منظور نگاشت عناصر IFC بر روی کلاس های CityGML تعریف شده است. ماژول های Dynamizer و versioning برای مدل سازی تغییرات و پویایی شهر به منظور مدیریت خواص وابسته به زمان استفاده می شوند. ماژول PointCloud امکان استفاده از ابرهای نقطه سه بعدی را برای نمایش هندسه فضاهای فیزیکی و مرزهای فضا اضافه می کند. علیرغم معرفی ماژول های جدید، سازگاری عقب مانده با CityGML 2.0 ادامه دارد.
فضای داخلی از بسیاری جهات با فضای باز متفاوت است. مفاهیم اساسی، مدلهای داده و استانداردهای اطلاعات مکانی باید برای برآوردن الزامات کاربردهای فضایی داخلی بازتعریف شوند. الزامات اطلاعات فضایی داخلی با توجه به انواع کاربردها متفاوت است. به طور کلی کاربردهای اطلاعات فضایی داخلی به دو دسته طبقه بندی می شوند. دسته اول مدیریت اجزای ساختمان و تاسیسات داخلی و دسته دوم به موارد استفاده از فضای داخلی می پردازد. مدیریت ساخت و ساز ساختمان و مدیریت تاسیسات به دسته اول تعلق دارند. در حالی که تمرکز اصلی دسته اول بر روی اجزای ساختمانی مانند سقف و دیوار است. دسته دوم بر استفاده و بومی سازی ویژگی ها (ایستا یا متحرک) در فضای داخلی متمرکز است. اطلاعات فضایی داخلی دسته دوم برای نمایش اجزای فضایی مانند اتاق ها و راهروها و محدودیت هایی مانند درها است. به عنوان مثال، خدمات مبتنی بر مکان داخلی، تجزیه و تحلیل مسیرهای داخلی، یا خدمات برچسب گذاری جغرافیایی داخلی به دسته دوم تعلق دارند. هدف استاندارد IndoorGML [11 ] تعریف چارچوبی برای دادههای فضایی در مورد فضای داخلی است که میتواند عناصر ثابت یا پویا را در درون جسم قرار دهد و تمام خدمات فضایی مربوطه را که به جای نمایش خود معماری، با موقعیت آنها در فضا سروکار دارد، ارائه دهد. با این حال، نیاز به ادغام CityGML و IndoorGML در [ 29 ] برای مدلهای ساختمانی سه بعدی که سناریوهای داخلی و خارجی را ترکیب میکنند نشان داده شده است. همانطور که قبلا ذکر شد، CityGML 3.0 آینده یکپارچگی بهتر با IndoorGML را از طریق معرفی مفاهیم فضا و مرز فضا پیش بینی می کند.
2.2. کاربرد مدل های سه بعدی شهر
گروگر و پلومر (2012) [ 20] یک نمای کلی از CityGML، مفاهیم زیربنایی و LoD های آن، نحوه گسترش آن از طریق ADE، برنامه های کاربردی ممکن و توسعه بالقوه آن در آینده ارائه می دهد. تمرکز CityGML بر جنبههای معنایی مدلهای شهر سهبعدی است که به کاربران اجازه میدهد از مدلهای شهر سهبعدی مجازی برای کارهای تحلیل و تجسم پیشرفته در حوزههای مختلف کاربردی مانند برنامهریزی شهری، کاداسترهای سهبعدی، شبیهسازیهای محیطی، میراث فرهنگی، مدیریت تسهیلات، استفاده کنند. و غیره. این برخلاف مدلهای گرافیکی کاملاً هندسی مانند KML یا VRML است که معنای کافی را ارائه نمیکنند. CityGML بر اساس زبان نشانه گذاری جغرافیایی (GML) است که یک مدل هندسه استاندارد ارائه می دهد. به دلیل این مدل و معناشناسی و ساختار کاملاً تعریف شده آن، CityGML از تبادل داده های متقابل در زمینه خدمات وب جغرافیایی و زیرساخت های داده مکانی پشتیبانی می کند. بنابراین، هدف اصلی مدلهای شهر سهبعدی مبتنی بر CityGML نه تنها ارائه تجسم سهبعدی منطقه شهری، بلکه ذخیره دادههای مربوط به شهر و ایجاد پایگاههای اطلاعاتی شهری است که باید به عنوان پایهای برای زمینههای کاربردی مختلف باشد. به طور کلی می تواند زیرساخت داده های مکانی کلی را برای برنامه های مختلف شهر هوشمند فراهم کند.
با توجه به بررسی متون، یکی از حوزههای عمده کاربرد مدلهای شهر سه بعدی برای شهرهای هوشمند مربوط به مدلسازی و شبیهسازیهایی است که بر محیطزیست تأثیر میگذارند، مانند بهرهوری انرژی مناطق شهری، مدلسازی انرژی ساختمانهای شهری و انرژی در سطح شهر. شبیه سازی [ 30 ، 31 ، 32 ، 33 ، 34 ، 35 ]، موجودی گازهای گلخانه ای، انتشار CO 2 و شهرهای کم کربن [ 36 ، 37 ]، تجزیه و تحلیل میکرو اقلیم شهری [ 38 ]، منابع انرژی خورشیدی در شهرها با استفاده از مدل های شهر سه بعدی [ 39 ]، شبیه سازی انرژی شهری برای حفاظت از آب و هوا [40 ] و غیره
کاداسترهای سه بعدی نیز یک حوزه بالقوه مهم برای کاربرد استاندارد CityGML هستند. این روند رو به رشدی است که شهرها مدل های شهر را طبق CityGML تولید می کنند، معمولاً از ابرهای نقطه ای تولید شده توسط LiDAR. چنین داده هایی می توانند برای اهداف کاداستر سه بعدی مجددا استفاده شوند. چندین مطالعه به تجزیه و تحلیل امکان استفاده از CityGML برای پیوند فضاهای قانونی و فیزیکی، با استفاده از گسترش دامنه کاربردی (ADE) پرداخته اند، که توجه خاصی به ساختمان ها دارد [41 ، 42 ] . ساختمانهای سهبعدی در LoD2 ممکن است بهعنوان ترکیبی از نقشههای زمینی ساختمان دیجیتالی دوبعدی که از نقشههای رسمی کاداستر دیجیتال و دادههای LiDAR مشتق شدهاند، ایجاد شوند [ 43 ]. اجرای عملی CityGML ADE بر اساس مدل حوزه مدیریت زمین [44 ] مزایای ایجاد روابط بین اشیاء فضایی از دنیای حقوقی و فیزیکی را نشان داده است. یک گسترش دامنه کاربردی به CityGML برای مالیات بر اموال غیر منقول در ترکیه توسط Çağdaş [ 45 ] پیشنهاد شده است . یک مدل داده فضایی سه بعدی از حقوق خورشیدی مرتبط با املاک مسکونی فردی توسط لی و همکاران ارائه شده است. [ 46 ]. این مدل از مدل حوزه مدیریت زمین گسترش یافته و توسط CityGML پیادهسازی شده است و میتوان آن را به پایگاه داده کاداستر ادغام کرد. یک مدل توسعه دامنه برنامه CityGML-LADM برای ساختار مالکیت واحدهای آپارتمانی توسط لی و همکاران پیشنهاد شده است. [ 47]. ساختار فضایی مدلهای دادههای سهبعدی در CityGML و کلاسهای پایه صنعتی (IFC) در مدیریت محدودیتهای حقوق عمومی سه بعدی توسط Kitsakis و همکاران مورد بررسی قرار گرفت. [ 48 ]. ادغام ابعاد قانونی و فیزیکی محیط های شهری از طریق استفاده از مدل های BIM و GIS مانند CityGML و IFC نیز مورد توجه قرار گرفت [ 49 ، 50 ]. در صربستان، تحقیقات متعددی برای اثبات سودمندی فرمت های سه بعدی مانند CityGML و IFC در زمینه کاداستر سه بعدی انجام شده است [ 51 ، 52 ].
در حوزه مدیریت شهری و شهرهای هوشمند، ایکر و همکاران. [ 53 ] یک پلت فرم شهری یکپارچه را به عنوان زیرساخت نرم افزاری ضروری برای برنامه ریزی، بهره برداری و نگهداری شهری هوشمند، پایدار و تاب آور پیشنهاد کرد که بر اساس مدل های شهر سه بعدی و گردش کار برای مدل سازی انرژی ساختمان در مقیاس شهر است. روشی برای حمایت از مقاوم سازی انرژی مناطق تاریخی توسط Egusquiza و همکاران پیشنهاد شده است. [ 54 ] و CityGML با پسوندهای حوزه فرهنگی و انرژی غنی شده است. Chaturvedi و همکاران، کنترل دسترسی در زیرساخت های داده های مکانی را برای شهرهای هوشمند بر اساس مدل های شهر سه بعدی و CityGML پیشنهاد کردند [ 3]]. خدمات وب CityGML RESTful برای بازیابی خودکار داده های CityGML بر اساس معنایی آنها توسط Pispidikis و Dimopolou [ 55 ] پیشنهاد شد. این وب سرویس به طور مفهومی برای دستیابی به بازیابی داده های CityGML بر اساس ویژگی های معنایی آنها و ارائه داده ها در قالب JSON در زمینه خدمات وب سه بعدی طراحی شده است.
3. منطقه مطالعه و روش
3.1. منطقه مطالعه
شهر نووی ساد (45 درجه و 15 دقیقه شمالی، 19 درجه 50 دقیقه شرقی) در قسمت شمالی صربستان، یعنی در قسمت جنوبی دشت پانونیا واقع شده است و دومین شهر بزرگ کشور با جمعیتی بالغ بر 100 کیلومتر است. حدود 300000 در منطقه ساخته شده به مساحت تقریبی 130 کیلومتر مربع . منطقه جغرافیایی دشتی است، از ارتفاع 76 تا 86 متر ارتفاع، با برجسته ای ملایم. علاوه بر بخش شهری شهر نووی ساد، منطقه اداری توسط رودخانه دانوب تقسیم می شود و از شهر نووی ساد و یک شهر کوچک پترووارادین، سه شهر و ده روستا تشکیل شده است. منطقه مورد مطالعه شامل بخش مرکز شهر، محوطه پردیس دانشگاه نووی ساد و قلعه پترووارادین است که در شکل 1 نشان داده شده است .
3.2. پارامترهای اکتساب و پردازش پایه
برای روش های جمع آوری داده های عظیم از پلتفرم LiDAR استفاده شد. برای این منظور از اسکنر لیزری Riegl LMS-Q680i و دوربین دیجیتال DigiCAM H39 استفاده شد. تمام داده های حسگرها به دلیل یک سیستم ارجاع جغرافیایی مستقیم متشکل از یک سیستم ناوبری GPS-IMU، که توسط گیرنده GPS و یک سنسور اینرسی تشکیل شده است، کدگذاری جغرافیایی شدند.
ارتفاع پرواز با توجه به کوه نگاری منطقه و استانداردهای ایمنی، حدود 200 متر AGL و سرعت حدود 45 کیلومتر حفظ شده است. چگالی پالس های لیزر خام حدود 40 pt/m2 بود. سیستم ژئودتیک بررسی ETRS89-UTM34N بود. محصولات نهایی در همین سیستم تحویل داده شد.
خطوط پرواز جغرافیایی و کالیبره شده ادغام و پردازش می شوند تا نقاط پایین، نقاط هوایی، پژواک های کاذب و غیره را فیلتر کنند. به دلیل محدودیت های فیزیکی، نرم افزاری و سخت افزاری که در رایانه های نسل آخر نیز وجود دارد، مربوط به مدیریت و توسعه با تعداد محدودی از نقاط، ابر نقاط به بلوک های مربعی با ضلع 250 متر تقسیم شد. اولین طبقه بندی با استفاده از الگوریتم های خودکار سریع انجام شد که در TerraScan انجام شد ( https://www.terrasolid.com/products/terrascanpage.php). طبقهبندی در TerraScan تعدادی روال طبقهبندی را ارائه میدهد که بر نقاط یا گروهی از نقاط تأثیر میگذارند یا بر آنها تکیه میکنند، یا روالهایی که فقط در ماکروها قابل استفاده هستند. در طول پردازش داده های لیزری، طبقات زیر تعریف می شوند: زمین، پوشش گیاهی، نقاط پست، سقف ساختمان ها و پیش فرض.
روال زمین با ایجاد یک مدل سطح مثلثی به صورت تکراری، نقاط زمین را طبقه بندی می کند. دو روال وجود دارد، یکی برای طبقه بندی زمین در مجموعه داده های لیزر هوابرد و در مجموعه داده هایی که عمدتاً زمین طبیعی وجود دارد، و دوم برای طبقه بندی زمین هایی که عمدتاً سطح زمین سخت است، مانند جاده های آسفالته، مناسب ترین است. یا مناطق دیگر ما از هر دو استفاده کردهایم، با ترسیم چند ضلعیها در اطراف مناطق طبیعی/آسفالتشده به منظور اعمال یکی در داخل چند ضلعیها و روال دیگر برای بقیه دادهها.
روتین زیر سطح، نقاطی را که پایین تر از نقاط همسایه در کلاس منبع هستند طبقه بندی می کند. این روال پس از طبقهبندی زمین اجرا میشود تا نقاطی را که کمی زیر سطح زمین واقعی قرار دارند، بیابند. برای هر نقطه، روال تا 25 نزدیکترین نقطه همسایه را در کلاس منبع پیدا می کند. یک صفحه مسطح یا منحنی را با نقاط همسایه منطبق می کند و میانگین بزرگی اختلاف ارتفاع بین نقاط و صفحه را محاسبه می کند. از این روال برای طبقه بندی نقاط پایین استفاده می شد.
طبق روال ارتفاع از زمین، نقاطی را که در محدوده ارتفاع معینی در مقایسه با سطح مرجع قرار دارند، طبقه بندی می کند. این روال همچنین برای طبقه بندی نقاط به طبقات مختلف پوشش گیاهی برای آماده سازی، به عنوان مثال، سقف ساختمان، یا تشخیص درخت استفاده می شود. روال ساختمانها نقاطی را بر روی سقف ساختمانها طبقه بندی می کند که یک سطح مسطح را تشکیل می دهند. روال مستلزم این است که نقاط زمین قبلاً طبقه بندی شده باشند. همچنین توصیه می شود نقاط بالای زمین را به یک کلاس جداگانه طبقه بندی کنید، به طوری که این طبقه شامل نقاطی در محدوده ارتفاعی از سطح زمین است که سقف های ساختمان در آن گنجانده شده است. روال از مناطق خالی در کلاس زمین شروع می شود و سعی می کند نقاطی را در سطوح مسطح بالای این مناطق پیدا کند. این دو روال برای طبقه بندی خودکار پوشش گیاهی و سقف ساختمان ها استفاده شد.
از سوی دیگر، گرفتن تصویر با دوربین ذکر شده در بالا، امکان ایجاد ارتفتو دیجیتال را فراهم می کند. زنجیره پردازش ساخت ارتوفوتو به شرح زیر است:
-
دانلود و پشتیبان گیری از تصاویر خام
-
خروجی مسیر دوربین
-
پردازش داده های خام
-
ارجاع جغرافیایی قابها، موزاییکسازی و اصلاح قابها.
در طول پردازش داده های خام، فریم های منفرد به فرمت TIFF فشرده نشده با اولین تعادل و اصلاح رادیومتری تبدیل می شوند. با استفاده از مسیر هوایی، دادههای GPS و مهر زمانی عکسها، تصاویر موزاییک میشوند، با تعریف نیمه خودکار نقاط اتصال و خطوط برش بین تصاویر همپوشانی.
حسگرهای هوابرد Lidar اطلاعات ارتفاع متراکم مناطق بزرگ را به شیوه ای کارآمد ارائه می دهند و می توان از آن برای توسعه مدل شهر سه بعدی استفاده کرد [ 56 ]. در مطالعه موردی ما با پارامترهای 40 نقطه بر متر مربع و تصاویر هوایی با 5 سانتیمتر بر پیکسل عملیاتی شده است.
برای تولید مدل رقومی ارتفاع (DEM) از ابر نقطه، فیلتر کردن ابر نقطه باید انجام شود تا نقاطی که سطح اجسام غیرزمینی را نشان میدهند حذف شوند. برای تصحیح ارتو یک مدل زمین دیجیتال (20cm/px) مشتق شده از نقاط ابر استفاده شد و تنها نقاط مهم زمین را فیلتر کرد. برای این منظور، ما همچنین از TerraScan استفاده کردهایم که از یک الگوریتم فیلتر مبتنی بر شبکههای نامنظم مثلثی استفاده میکند که با نقاط داده از زیر سازگار میشود و سطوح را با ناپیوستگی مدیریت میکند [57 ، 58 ] . به دلیل کارایی آن، در سالهای اخیر نمونههای زیادی از استفاده از دادههای لیدار برای فرآیند تصحیح ارتو نه تنها برای تصاویر هوابرد، بلکه برای تصاویر ماهوارهای نیز دیدهایم [59] .، 60 ].
این پردازش زنجیره ای مطابقت کاملی را بین تصاویر ارتو، نقاط ابری و مدل زمین تضمین می کند، با توجه به این واقعیت که از همان مسیر برای بسط داده ها استفاده می شود. پس از این فرآیند، تصاویر ارتو در قالب TIFF برای تجسم و تجزیه و تحلیل ارائه شدند. وضوح تصاویر ارتو 10 سانتی متر بود.
در این مطالعه موردی، پس از اسکن LiDAR، به عنوان اولین گام، تصاویر ارتوفتو و یک ابر نقطه ارجاع داده شده ایجاد شده است. قبل از هر اقدام بعدی، این داده ها باید پردازش و آماده می شدند. آمادهسازی دادهها شامل مراحل زیر بود: طبقهبندی اولیه، طبقهبندی جزئیات، برداری دو بعدی یا سه بعدی و ایجاد مدل ارتفاعی دیجیتال. طبقه بندی اولیه معمولاً به راه حل نرم افزار بستگی دارد، اما همه آنها داده های LiDAR را در چندین کلاس مشابه (پیش فرض، زمین، پوشش گیاهی کم، پوشش گیاهی متوسط، پوشش گیاهی بالا، ساختمان، نقاط کم و نقاط کلیدی مدل) طبقه بندی کردند. همانطور که قبلا ذکر شد، تمام این مراحل در TerraScan با استفاده از ماکروهای دسته ای از قبل آماده شده برای طبقه بندی اولیه و برای ایجاد مدل ارتفاعی دیجیتال انجام شد. طبقهبندی جزئیات معمولاً بر اساس مشخصات پروژه است و در این مورد مطابق با تمام لایههای موجود که مربوط به این مطالعه موردی تشخیص داده شدهاند و همچنین در رابطه با مقررات قانونی موجود که بعداً برای بردارسازی مورد استفاده قرار گرفتند، انجام شد. پس از آن، برداری دو بعدی و سه بعدی با استفاده از داده های طبقه بندی شده LiDAR و طبق قوانین مربوطه در جمهوری صربستان انجام شد.61 ]. لیست تمام لایه ها را می توان در جدول 1 مشاهده کرد . در نهایت، نتایج این مراحل پردازش اولیه یک ابر نقطه کاملا طبقه بندی شده و یک فایل حاوی مدل های ساختمانی سه بعدی در ساختار CAD بود که در شکل 2 نشان داده شده است .
4. نتایج – توسعه مدل شهر سه بعدی مجازی
4.1. تبدیل داده ها
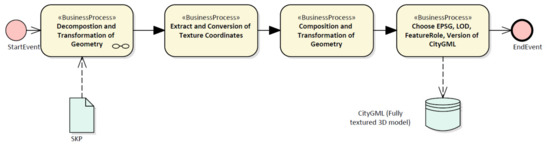
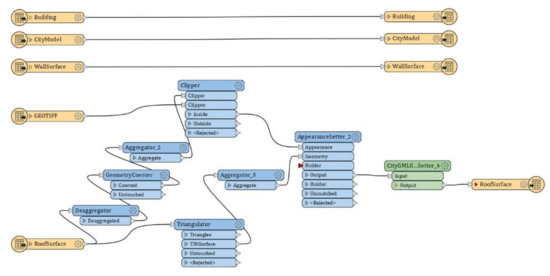
پس از طبقهبندی و بردارسازی دوبعدی و سهبعدی ابر نقطهای، مدلهای ساختمانی سهبعدی در ساختار CAD حاصل میتوانند به روشهای متعددی مورد استفاده قرار گیرند. استفاده اساسی از این ساختار CAD فقط برای تجسم خالص است، اما برای استفاده پیشرفته و بیشتر در برنامه های مختلف باید به فرمت های GIS یا BIM تبدیل شود. برای تبدیل کامل فرمت CAD مانند DGN یا DXF به فرمت IFC یا GML مراحل مختلفی باید طی شود. شکل 3 گردش کار پیشنهادی فرآیند تبدیل داده را نشان می دهد.
راه حل اول ایجاد یک مدل CityGML به طور مستقیم از یک ساختار CAD، یا یک فایل CAD سازماندهی شده در لایه ها است ( شکل 3 – تبدیل ETL 1). با استفاده از ETL Transformation 1 میتوان مدلی را طبق استاندارد CityGML تقریباً خودکار ایجاد کرد، زیرا از مرحله پردازش دستی در ابزار BIM میگذرد. بخشی از این گردش کار تبدیل از ساختار سه بعدی CAD به مدل GML با یا بدون بافت سقف است.
از سوی دیگر، همانطور که در شکل 3 مشاهده می شود، برای مدل سه بعدی کاملاً بافت دار مطابق با استاندارد CityGML، فایل DGN که قبلاً تولید شده بود به نرم افزار ابزار BIM وارد شد تا بافت های واقعی نوری به مدل سه بعدی اضافه شود. پس از آن، به عنوان یک فرمت IFC یک راه حل به طور مستقیم در دسترس است، یا با استفاده از تبدیل ETL 2 و الگوریتم ها و توابع برای دستکاری اشیاء سه بعدی ارائه شده است، مدل سه بعدی بافت مناسب را مطابق با استاندارد CityGML داریم (شکل 4) .). برای اینکه مدل با استانداردهای GIS مطابقت داشته باشد، مهم است که ویژگی های هندسی و توپولوژیکی و معنایی شی را ذخیره کند. ما از تبدیل ETL 2 استفاده میکنیم که دادههای CAD را تشکیل میدهد، مدلهای کاملاً طراحیشده را در یکی از دو استاندارد رایج برای ذخیرهسازی، تجسم، و مهمتر از همه، تجزیه و تحلیل داده ایجاد میکنیم – CityGML و BIM/IFC (شکل 3 ) .
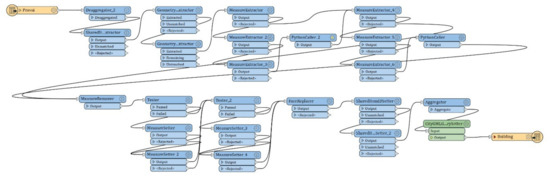
همانطور که در شکل 3 مشاهده می شود ، برای تبدیل مدل SketchUp (SKP) به استاندارد CityGML، باید تجزیه شود و به چندین مؤلفه تعریف شده توسط استاندارد تبدیل شود که توسط ETL Transformation 2 انجام می شود. گردش کار این تبدیل از به یک فرمت GML در شکل 5 نشان داده شده است .
از طریق این تجزیه و تبدیل، تمام ویژگیهای معنایی مهم اضافه میشوند و مدل فوتورئالیستی در قالب GML با استفاده از ابزار FME ( https://www.safe.com/fme/ ) ایجاد شد . این طرح تحول در شکل 6 نشان داده شده است و از چندین بخش کلیدی تشکیل شده است.
بخش اول این تبدیل بخشی است که مربوط به تبدیل مختصات بافت از مدل SKP ورودی به مختصات بافت است که به ترتیب در استاندارد CityGML شناخته شده است. این در صورتی است که با بخش مربوط به تجزیه و ترجمه هندسه های مدل SKP (مجموعه هندسه) به هندسه های سطحی که برای CityGML قابل درک هستند، دنبال شود. پس از این مرحله، هر هندسه منفرد (سطح هندسه)، به مختصات بافت مناسب یا تصاویر فوتورئالیستی که مطابق با CityGML هستند، اختصاص داده می شود. بخش نهایی تبدیل ETL، ادغام تمام هندسههای سطح در یک موجودیت است که یک شی واحد را نشان میدهد و به کمک ترانسفورماتور CityGML Geometry Setter ویژگیهای CityGML مناسب را اختصاص میدهد. این ترانسفورماتور اجازه می دهد تا ویژگی هایی مانند نام CityGML LoD، lod3MultiSurface، و همچنین نقش های ویژگی CityGML یا عضو شی شهر را اضافه کنید. همچنین در مرحله آخر سیستم مرجع مختصاتی که شی مورد نظر در آن قرار دارد تعریف می شود. در این تبدیل، و همچنین در سایر تبدیلهای ETL که در این مطالعه موردی استفاده میشوند، EPSG: 32634، CRS ملی صربستان استفاده میشود. نتیجه نهایی تحول ازشکل 6 مدل CityGML یک شی منفرد است ( شکل 7 a)، یک ساختمان از نوع عنصر، یک LoD 3 با یک نمایش فوتورئالیستی در سیستم مختصات مربوطه.
همین فرآیند برای ترجمه SKP به IFC اعمال شد. اجزای IFC عبارتند از IfcBuilding، IfcBuildingElementProxy، IfcBuildingStorey، IfcProject و IfcSite که ساختار فضایی ساختمان را نشان می دهند [ 52 ]. در بین این پنج مؤلفه، فقط IfcBuildingElementProxy هندسی است، در حالی که بقیه مؤلفه های ویژگی هستند. شکل 7 مدل همان شی را در قالب GML ( شکل 7 الف) و IFC ( شکل 7 ب) نشان می دهد.
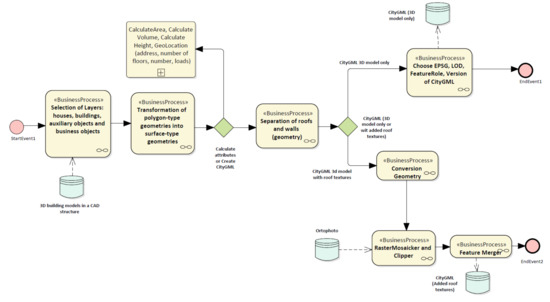
راه دیگر برای ایجاد یک مدل CityGML این است که آن را مستقیماً از یک ساختار CAD یا یک فایل CAD سازماندهی شده در لایه ها ایجاد کنید ( شکل 3 – تبدیل ETL 1). این روش ایجاد مدل طبق استاندارد CityGML بسیار خودکارتر است زیرا از مرحله پردازش دستی در ابزار BIM صرفنظر می کند. گردش کار برای تبدیل از ساختار سه بعدی CAD به مدل GML با یا بدون بافت سقف در شکل 8 نشان داده شده است .
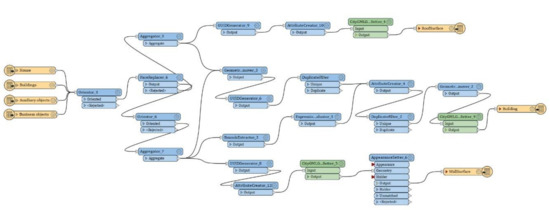
این تبدیل ETL در دو مرحله انجام می شود. اولین تبدیل ( شکل 9 ) به تبدیل مدل CAD به یک مدل GML بدون بافت، و تبدیل دوم ( شکل 10 ) برای افزودن بافت سقف از تصاویر ارتوفتو به مدلهای شی که قبلاً در قالب GML ایجاد شده بودند، اشاره دارد.
اولین تبدیل ETL ( شکل 9، در ابتدا شامل چهار لایه ورودی از فرمت CAD است: خانه ها، ساختمان ها، اشیاء کمکی و اشیاء تجاری. همانطور که در تبدیل قبلی ETL، برای اینکه داده ها به فرمت GML تبدیل شوند، لازم است آنها را از هندسه های چند ضلعی به هندسه های سطحی تبدیل کنیم و همه آنها را در یک جهت، به طور دقیق تر توسط قانون سمت چپ، جهت دهی کنیم. مرحله جهت گیری انجام شده در ابتدا از طریق ترانسفورماتور جهت یابی، به منظور داشتن سطوح یکنواخت جهت کار آینده برای افزودن بافت به سمت خاصی از یک سطح (سطوح سقف یا دیوار) و همچنین برای تشخیص بیرونی و داخلی مهم است. کنار یک سطح هنگام ساختن هندسه های جامد. در مورد نوع ویژگی CityGML WallSurface و RoofSurface عناصر، آنها اطلاعات هندسه ای را برای هر شی که باید در تبدیل ETL حفظ شود، حمل می کنند، به طوری که می توان از آنها در تحلیل های توپولوژیکی آینده در مدل شهر سه بعدی هوشمند استفاده کرد. ساختمان نوع ویژگی CityGML یک عنصر صرفاً ویژگی است و در این مورد، اطلاعات مربوط به هندسه ها را حمل نمی کند، اما تمام اطلاعات لازم را که مربوط به هر یک از ساختمان های مدل سه بعدی شهر است، ذخیره می کند. به عنوان نمونه ای از افزودن ویژگی ها به نوع ساختمان، ارتفاع واقعی برای هر شی به صورت جداگانه از مختصات هر شی استخراج می شود و به ویژگی CityGML مناسب تعریف شده توسط خود استاندارد (citygml_measured_height) اضافه می شود. یکی دیگر از ویژگی های مربوط به ارتفاع اشیاء واحدهای اندازه گیری هستند که ارتفاعات در آنها بیان می شود (citygml_measured_height_unit). علاوه بر این صفات، نوع ساختمان ها سطح جزئیات هر ساختمان، نقش ویژگی ها، نام LoD را مشخص می کند. همچنین، اگر اطلاعاتی برای هر شی مانند خیابانی که در آن قرار دارد، شماره ساختمان، تعداد طبقات، مساحت طبقه و موارد دیگر وجود داشته باشد، به عنوان بخشی از این نوع ویژگی اضافه می شوند. هر سه نوع ویژگی (Building، RoofSurface و WallSurface) دارای gml_id مشترک هستند که به طور منحصر به فرد بر روی آن تعریف شده اند. همچنین، ترانسفورماتورهای CityGML Geometry Setter به هر سه نوع ویژگی اختصاص داده شد و سیستم مختصات تعریف شد (EPSG: 32634). در نتیجه تبدیل ETL از هر سه نوع ویژگی (Building، RoofSurface و WallSurface) دارای gml_id مشترک هستند که به طور منحصر به فرد بر روی آن تعریف شده اند. همچنین، ترانسفورماتورهای CityGML Geometry Setter به هر سه نوع ویژگی اختصاص داده شد و سیستم مختصات تعریف شد (EPSG: 32634). در نتیجه تبدیل ETL از هر سه نوع ویژگی (Building، RoofSurface و WallSurface) دارای gml_id مشترک هستند که به طور منحصر به فرد بر روی آن تعریف شده اند. همچنین، ترانسفورماتورهای CityGML Geometry Setter به هر سه نوع ویژگی اختصاص داده شد و سیستم مختصات تعریف شد (EPSG: 32634). در نتیجه تبدیل ETL ازشکل 9 ، مدل CityGML 1204 از ساختمان های شهر (واقع در مرکز شهر، محوطه دانشگاه و قلعه پترووارادین) LoD2 توسعه یافته است. این مدل در سیستم مختصات مناسب تنظیم شده است و حاوی عناصر فوتورئالیستی نیست.
مشکلاتی که در هنگام ایجاد تبدیل ETL توصیف شده، یعنی مدل سه بعدی شهر مورد توجه قرار گرفت، این است که برخی از اشیاء برخی از ویژگی های هندسی خود را پس از تبدیل از دست دادند. به عنوان مثال، برخی از ساختمان ها هندسه سقف خود را نداشتند، یا آنها را تا حدی دریافت کردند، همچنین مشکل این است که رد پاهای برخی از ساختمان ها در جایی که باید باشد نیست، اما حدود 80 متر پایین تر است (در 0 متر بالاتر). سطح دریا). تجزیه و تحلیل بعدی مدل های فوق الذکر از اشیاء نشان داد که مشکل از تبدیل ETL سرچشمه نمی گیرد. ریشه مشکل در مدل های ایجاد شده در ساختار CAD از طریق بردارسازی ساختمان سه بعدی خودکار بود. برخی از ساختمانها به درستی بردار نبودند و مطابق با استاندارد CityGML، هندسههای معیوب ایجاد شد.
دگرگونی دوم ( شکل 10 ) در واقع ادامه دگرگونی ساختمان های از قبل ایجاد شده در استاندارد CityGML ( شکل 9 ) است، اما با افزودن بافت سقف ها از تصاویر ارتوفتو، همه طبق استاندارد CityGML.
هدف از این دگرگونی کلیپ کردن تصاویر ارتوفتو موزاییک شده قبلی با لبه های سقف ساختمان ها برای به دست آوردن تطابق کامل و ارضای شرایط فوتورئالیسم، بالاتر از همه اعتبار و بافت سطوح، طبیعی بودن و تابش چنین سطوحی است. مدل. برای این تبدیل استفاده از تصاویر ارتوفتو که همزمان با اسکن لیزری ایجاد شده اند بسیار مهم است زیرا آنها قبلاً در یک سیستم مختصات قرار دارند و از یک پلت فرم ایجاد شده اند (مشکل ارتوفتو افست در رابطه با ساختمان مدل ها رخ ندادند). این تبدیل ETL برای تبدیل هندسه سطح CityGML به هندسه های چندضلعی استفاده می شود تا شطرنجی را بتوان برش داد. بعد از آن، gml_id از سقف ها به آن شطرنج هایی که نمایانگر سقف ها بودند اضافه شد و بنابراین به هر سقف یک تصویر سقف مناسب اختصاص داده شد. در نتیجه تحول ازشکل 10 ، مدل CityGML 1204 از ساختمان های شهر (مرکز شهر، پردیس و قلعه پترووارادین) LoD2 با عناصر فوتورئالیستی سقف ها و در یک سیستم مختصات مناسب ایجاد شده است. برخی از مشکلاتی که هنگام ایجاد این تبدیل ETL مشاهده می شود این است که تصاویر گرفته شده، عکس های ارتوفوتوی واقعی نیستند و این به عنوان یک مشکل در اجسام بلند منعکس شده است. بافت سقف به طور یکسان بر روی هندسه سقف ساختمان های بلند قرار نمی گیرد. یکی دیگر از کاستی های مشاهده شده این است که در حین اسکن تصاویر اریب برای ایجاد بافت دیوارهای ساختمان ها گرفته نشده است. این کاستی برای تحقیقات آتی که بر روی این تحقیق ساخته خواهد شد پیش بینی شده است. شکل 11یک مدل سه بعدی از شهر را در سرویس گیرنده نقشه وب سزیوم با عناصر سقف فوتورئالیستی و ویژگی های مربوط به هر یک از ساختمان ها نشان می دهد.
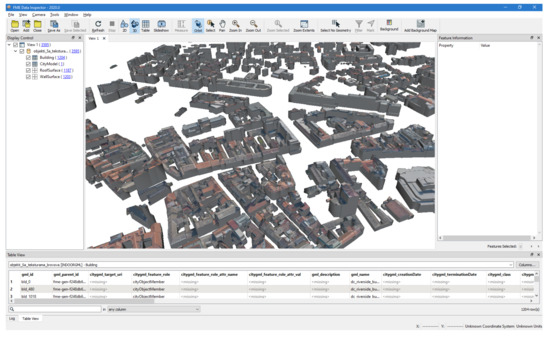
یکی از مزیت های اصلی بررسی و پردازش انبوه LiDAR و طبقه بندی خودکار داده های ابر نقطه ای، نتایج طبقه بندی و امکان اتصال نتایج با ویژگی های تعریف شده توسط استاندارد CityGML است. جدول 2 یک نمای کلی از تمام لایه های CAD را ارائه می دهد که با تبدیل ETL به فرمت GML تبدیل شده اند، یعنی به ویژگی های تعریف شده توسط استاندارد CityGML. شکل 12این ویژگی ها را نشان می دهد. پس از ایجاد مدل سه بعدی، تمام اعتبارسنجی های لازم از فرمت GML به دست آمده برای تعیین اینکه آیا مدل به دست آمده تمام ویژگی های هندسی، توپولوژیکی و معنایی تعریف شده توسط استاندارد CityGML را برآورده می کند، انجام شده است. مدل شهر سه بعدی که بدین ترتیب ایجاد شد، مطابق با استاندارد CityGML، به پایگاه داده 3DCityDB ( https://www.3dcitydb.org/3dcitydb/ ) وارد شد.
CityGML یک راه حل جذاب برای میزبانی و به اشتراک گذاری مدل های سه بعدی شهرها است زیرا هندسه و معناشناسی را در یک مدل داده جامع ترکیب می کند. با این حال، تجسم موثر هندسه سه بعدی و اطلاعات معنایی موجود در قالب CityGML بسیار پیچیده است. چندین برنامه دسکتاپ وجود دارد که می تواند CityGML را روی رایانه های محلی تجسم کند و برخی از آنها عبارتند از FME Data Inspector، QGIS، FZK Viewer، Azul، Aristoteles، Tridicon City Discoverer Light و SuperMap Desktop. در حالی که از سوی دیگر، تجسم مدل CityGML در وب هنوز یک منطقه چالش برانگیز است و راه حل های زیادی وجود ندارد. این راه حل ها عمدتاً به تبدیل مدل CityGML به یک مدل داده ای کاهش می یابد که برای نمایش صحنه های سه بعدی مناسب تر است (glTF، COLLADA، X3D، OBJ، KML،شکل 12 مدل سه بعدی شهر را در قالب CityGML با کمک FME Data Inspector نشان می دهد.
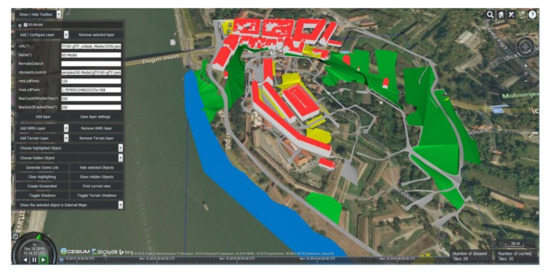
برای اهداف تجسم مدل CityGML در وب، مدل شهر سه بعدی ایجاد و ذخیره شده در پایگاه داده 3DCityDB سپس در قالب glTF صادر شد تا با کمک Cesium JS Web Map Client، که برای نمایش مدل های سه بعدی شهر بهینه شده است، تجسم شود. همراه با تمام ویژگی های ضروری آن شکل 11 و شکل 13 دقیقاً مدل شهر سه بعدی را نشان می دهد که ابتدا مطابق با استاندارد CityGML ایجاد شده و سپس به فرمت glTF تبدیل شده است که با سرویس گیرنده نقشه وب Cesium JS (Philadelphia, PA 19107, USA, https://cesium.com/cesiumjs/) . ).
مزایای این رویکرد برای ایجاد یک مدل شهر سه بعدی در درجه بالای خودکارسازی فرآیند تبدیل داده های ورودی به دست آمده از اسکن لیزری به یک مدل شهر سه بعدی جامع عملکردی منعکس شده است. این بدان معنی است که زمان مورد نیاز به طور قابل توجهی در مقایسه با رویکرد قبلی کاهش می یابد، زیرا پردازش دستی داده ها و مدل سازی سه بعدی به مقدار زیادی از منابع انسانی و کامپیوتری نیاز دارد. همچنین تأثیر خطاهای انسانی را که می تواند با استفاده از روش هایی برای پردازش دستی داده ها و ایجاد مدل رخ دهد، کاهش می دهد. مشکلی که به وجود می آید این است که در حال حاضر هیچ راهی برای بافت دهی کامل اشیاء سه بعدی (افزودن بافت به دیوارها) وجود ندارد و این نیز یک جهت بیشتر برای کاوش یا هدفی است که باید دنبال شود. در زمان تعریف روشهایی برای بافتدهی کاملاً خودکار اشیا،
4.2. ارزیابی دقت داده ها
ایجاد مدلهای ساختمان سه بعدی در مقیاس بزرگ در حال محبوب شدن است و محبوبترین استاندارد مدلهای سهبعدی یک طرح کاربردی است که به آن CityGML [ 62 ] گفته میشود. با استفاده از این استاندارد می توان تمامی عناصر منظر شهری را مدلسازی کرد. در CityGML، سطوح جزئیات (LOD) به مدل های ساختمان اختصاص داده شده است [ 23 ]. این سطوح را می توان در انواع مختلف استفاده کرد و به دلیل علاقه قابل توجه به استاندارد مدل های ساختمانی، هنوز هم به تدریج در حال افزایش هستند [ 63 ].
امروزه رویکردها و مدلهای متفاوتی برای ارزیابی دقت ساختمانهای سه بعدی یافت میشود [ 64 ، 65 ، 66 ]. اولین گروه از رویکردها شامل مقایسه مدل ساختمان ایجاد شده با مدل مرجع است که به همان شکل ارائه شده است [ 67 ، 68 ]. گروه دوم شامل انجام ارزیابی دقت با استفاده از ابرهای نقطه ای LIDAR به عنوان داده های مرجع است که در آن روشی پیشنهاد می شود که در آن یکی از عناصر حیاتی محاسبه فاصله بین مدل ساختمان سه بعدی و ابر نقطه است [69] . ].
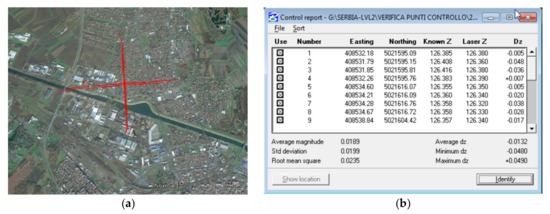
در طول اکتساب LiDAR در مطالعه موردی ما، تمام الزامات، دستورالعملها و توصیههای مربوط به ارزیابی کیفیت و کنترل کیفیت، از طرف انجمن فتوگرامتری و سنجش از دور آمریکا (ASPRS) برآورده شد [70 ] . برای اطمینان از دقت، اولین فعالیت مربوط به کالیبراسیون سیستم بود که در پرواز کالیبراسیون که بر روی منطقه کنترل انجام شد منعکس می شود. کنترل دقت عمودی بر روی 9 شبکه از نقاط کنترل انجام شد و RMSE تعیین شده زیر 3 سانتی متر بود. کنترل دقت افقی نتایج مشابهی را با RMSE تعیین شده زیر 10 سانتی متر نشان می دهد ( شکل 14 ).
تشخیص پرت در ابرهای نقطه LiDAR نیز قبل از مدلسازی سهبعدی فرآیند ضروری است، بهویژه زمانی که مدلهای سه بعدی پیچیده هستند. تاکنون مطالعات زیادی به منظور حذف نقاط پرت از داده های LiDAR انجام شده است. [ 71 ، 72 ]
در این مقاله مفهوم تولید اشیاء از LIDAR در سطح خانه، ساختمان، شیء کمکی، ساختمان مسکونی و تجاری تنها در سطح فایلهای CAD ارائه شد و فایل CityGML فقط شامل Building، RoofSurface و WallSurface میباشد. برای این مطالعه موردی، حضور احتمالی نقاط پرت در طبقهبندی اولیه حل شد. در طول طبقه بندی اولیه، نقاط پرت مانند نقاط پایین و ایزوله به طور خودکار اصلاح شدند. بسیاری از اشیاء در منطقه مورد مطالعه، دارای اشکال و سطوح صاف منظم هستند، بنابراین ظاهر پرت بر روی آنها حداقل بود و با استفاده از قابلیت های TerraScan خاصی تقریباً به طور خودکار حذف شدند. برای اجسامی که از نظر شکل و سطوح پیچیده بودند، برای موقعیتهای پیچیده مانند ساختمانهایی با سقفهای مختلف با جزئیات زیاد و بهویژه اجسام بسته به پوشش گیاهی مرتفع (درخت)، کنترل دستی و اصلاح و طبقهبندی نقاط LiDAR ضروری بود. این گام بسیار مهمی بود، زیرا این نقاط پرت می تواند باعث عدم دقت در نتایج به دست آمده در طول مدل سازی ساختمان های سه بعدی شود. بنابراین، طبقه بندی دستی مشکل را در مکان های ناقص و “پر سر و صدا” ساختمان- پوشش گیاهی حل می کند.
5. بحث و تحولات آینده
تمرکز CityGML بر جنبههای معنایی مدلهای شهر سهبعدی و ساختار آن است، که به کاربران اجازه میدهد از مدلهای شهر سه بعدی مجازی برای تحلیلها و تجسمهای پیشرفته در حوزههای مختلف کاربردی مانند برنامهریزی شهری، کاداستر، ناوبری داخلی و خارجی، محیطزیست استفاده کنند. شبیهسازیها، میراث فرهنگی و غیره. این در تضاد با مدلهای هندسی و گرافیکی محض مانند KML، VRML، OBJ، GLTF، COLLADA یا X3D است که معنایی کافی را ارائه نمیکنند. مدلسازی سه بعدی شهر استانبول [ 56برای مثال، از دادههای LiDAR جمعآوریشده از پلتفرمهای مختلف (هلیکوپتر، خودرو و سیستم کولهپشتی) استفاده کرد. آنها مدل سه بعدی ساختمان ها را فقط در قالب سه بعدی CAD (فایل های DGN و DWG) و BLOB.xml ایجاد کرده اند. سپس از فایل های BLOB برای ایجاد ساختمان های LoD2 و LoD3 با FME استفاده می شود. از سوی دیگر، CityGML مبتنی بر GML است که یک مدل هندسی و توپولوژی استاندارد شده از ویژگیهای جغرافیایی ارائه میکند و میتواند با سایر دادههای جغرافیایی ترکیب شود. به دلیل این مدل و معانی و ساختار کاملاً تعریف شده آن، CityGML میتواند تبادل دادههای متقابل را در زمینه خدمات وب جغرافیایی تسهیل کند و میتواند پایهای برای زیرساخت دادههای مکانی برای برنامههای کاربردی شهر هوشمند فراهم کند. ما تجزیه و تحلیل کردیم که چگونه می توان به این امر در زمینه کاداستر سه بعدی و شهرسازی دست یافت، اما می توان از آن در زمینه های دیگر نیز استفاده کرد. مانند مالیات بر دارایی که به موقعیت (منطقه) ملک و پارامترهای کیفی آن (سال ساخت، وضعیت ملک، گرمایش مرکزی، قرار گرفتن در معرض صدا و …)، مدل سازی بهره وری انرژی در مناطق خاص شهر (ساختمان) بستگی دارد. خوشه ها)، حل مسئله فضای ناکافی پارکینگ یا مناطق سبز، امکان مصرف انرژی خورشیدی و غیره. بنابراین، هدف ارائه یک گردش کار تایید شده بر روی یک مطالعه موردی منتخب برای توسعه پایگاه داده شهری سه بعدی معنایی از ابرهای نقطه LiDAR بود. که می تواند اهداف مختلفی را تامین کند. معیار اصلی برای انتخاب فعالیت ها در گردش کار این است که گردش کار نسبتاً آسان و کارآمد در عمل پیاده سازی شود. برای این منظور، استفاده از ابزارهای پیشرفته موجود ضروری است. با این حال،
5.1. مدل شهر سه بعدی مجازی و برنامه ریزی شهری
برنامه ریزی فضایی با سازماندهی و تنظیم فضا به منظور بهبود کیفیت زندگی ساکنان آن سروکار دارد [ 73].]. برنامه ریزی فضایی یک حوزه علمی و مهارتی میان رشته ای است که از رویکردی یکپارچه با توجه به مفهوم توسعه پایدار استفاده می کند. هدف یک رویکرد یکپارچه، پیوند زمینههای موضوعی مختلف است که علایق آنها در مناطق جغرافیایی خاصی همپوشانی دارند. از این نظر، داده های مکانی نقش کلیدی ایفا می کنند. برای دستیابی به کیفیت طرح های فضایی، لازم است که محدوده خاصی از جنبه های مختلف مورد تجزیه و تحلیل قرار گیرد. زمینه های موضوعی اولیه ای که باید در برنامه ریزی فضایی مورد توجه قرار گیرند عبارتند از: سکونتگاه های شهری و روستایی، صنعت، زیرساخت ها، خدمات عمومی، منابع طبیعی، محیط زیست و میراث فرهنگی. رشته هایی که شامل برنامه ریزی فضایی می شوند شامل برنامه ریزی کاربری اراضی، برنامه ریزی شهری، برنامه ریزی منطقه ای، برنامه ریزی حمل و نقل و برنامه ریزی محیطی است. برنامه ریزی فضایی می تواند به صورت محلی، منطقه ای،
قانون برنامه ریزی و ساخت و ساز صربستان [ 74 ] طرح فضایی را به عنوان یک سند برنامه ریزی تعریف می کند. چندین نوع طرح از جمله: طرح فضایی جمهوری صربستان، طرحهای فضایی منطقهای، طرحهای فضایی جوامع محلی (شهرداری)، طرحهای فضایی برای منطقه ویژه، و طرحهای شهری را تعریف میکند.
انواع مختلفی از شرکت های دولتی در صربستان وجود دارد که با برنامه ریزی شهری و فضایی شهرداری ها یا شهرها مرتبط هستند. هدف اصلی انجام کار مداوم بر روی برنامه ریزی فضایی و شهری محیط و سکونتگاه های دارای اهمیت استراتژیک برای جمهوری صربستان است. تمرکز اصلی شرکت های دولتی در سطح شهرداری به توسعه طرح فضایی شهر و طرح های فضایی شهرداری ها، توسعه طرح های فضایی برای مناطق ویژه، توسعه طرح های شهری برای حریم شهر، تصمیم گیری می باشد. تهیه پیش نویس اسناد برنامه ریزی، توسعه پروژه های شهری، ایجاد طرح های تنظیم تفصیلی، پروژه های واگذاری زمین، پروژه های ارزیابی استراتژیک، الزامات ساختمانی،
دادههای مکانی در این شرکتها عمدتاً با استفاده از نقشههای مکانی جغرافیایی ارجاعشده با جزئیات متفاوت ارائه میشوند که بستگی به هدف آن طرحها دارد. ویژگی مشترک چنین پلن هایی این است که معمولاً با استفاده از ابزارهای CAD در یک سیستم مختصات محلی به همراه توضیح متنی ایجاد می شوند و حاوی لایه های زیادی (اغلب بیش از صدها) هستند. مشکلاتی که در طول این فرآیند خلقت شناسایی میشوند توسط Sladić و همکاران خلاصه شدهاند. [ 75 ]. یکی از مسائل شناسایی شده عدم امکان درک جهانی از فضا است که با استفاده از داده های فضایی سه بعدی و مدل های سه بعدی شهر قابل بهبود است. اگرچه داده های فضایی سه بعدی در برنامه ریزی شهری در نووی ساد استفاده شده است، اما از مدل های معنایی مانند CityGML استفاده نشده است.
با توجه به مثالی که قبلاً از کاداستر توضیح داده شد، مدلهای شهر سه بعدی در قالب CityGML میتوانند برای تقویت لایههای برداری مختلف دو بعدی یا سه بعدی استفاده شوند که لایهها را در طرحهای تنظیم کلی و جزئی نشان میدهند (بهسرعت با بررسی انبوه LiDAR به دست میآیند). به منظور ارتباط با وضعیت فعلی در شهرسازی های مختلف، برنامه های تنظیم تفصیلی فضایی شهر نووی ساد، مجموعه داده های CityGML یا IFC باید به پایگاه های اطلاعاتی مرتبط شوند که حاوی داده های الفبایی در مورد کاربری و پوشش زمین هستند، مانند: سطح آب، محوطه سبز، خاکریز، محوطه پارک، محوطه ورزشی، پیاده رو، گورستان، مسیر دوچرخه سواری، پیاده رو، کانال باز در شهرک، خط برق، درختان بلند، چمن، چوب جنگلی، درختان سوزنی برگ و غیره. اما این لایه ها از شهری به شهر دیگر متفاوت هستند. ، و در صربستان تعداد منحصر به فرد و استاندارد شده ای از این لایه ها که توسط قانون تعریف شده است وجود ندارد. بنابراین، این مثال فقط برای شهر نووی ساد (دومین شهر بزرگ صربستان) و برای شرکت عمومی JP Urbanism شهر نووی ساد است.
همانطور که قبلا توضیح داده شد، استاندارد CityGML قبلاً مکانیزمی را برای پیوند یک شی از یک مدل سه بعدی به یک شی متناظر در یک سیستم اطلاعاتی دیگر، از طریق مراجع خارجی، پیش بینی کرده است. این مرجع شامل نام سیستم اطلاعات خارجی است که توسط یک شناسه منبع یکنواخت (URI) نشان داده شده است، که یک فرمت عمومی برای ارجاع به هر نوع منبع در اینترنت است، و مرجع شی خارجی، که توسط یک رشته (نام) یا توسط یک URI. جدول 3یک مرجع خارجی را نشان می دهد که حاوی URI به سیستم اطلاعاتی طرح های فضایی دقیق وضعیت فعلی برای شرکت های عمومی فضایی شهر نووی ساد است و در این مورد با شناسه منحصر به فرد کاربری و نوع پوشش زمین نشان داده می شود. . نام های دیگر ویژگی هایی که توسط مرجع خارجی می توان به آنها اشاره کرد عبارتند از: خط برق 603-p-ولتاژ پایین، راه آهن 209-p، پیاده رو 204-p، جاده 201-p، کانال باز 514-p در شهرک، قبرستان عمومی 136، سایبان 403 پی، خط انتقال 601 p…
یکی از زمینه های مهم کاربرد مدل شهر سه بعدی مبتنی بر CityGML توسعه یافته مرتبط با برنامه ریزی شهری، توسعه نقشه های استراتژیک نویز است. در سال 2002، اتحادیه اروپا دستورالعمل ارزیابی و مدیریت نویز محیطی [ 76 ] را به تصویب رساند که نیازمند توسعه نقشه های استراتژیک نویز و برنامه های عملیاتی به منظور کاهش نویز محیطی است. این دستورالعمل در جمهوری صربستان در قانون حفاظت در برابر نویزهای محیطی [ 77] اجرا شده است.]. نقشه استراتژیک نویز نقشهای است که دادههای سطح نویز در یک منطقه را ارائه میکند و برای تخمین میزان نویز کل یک منطقه خاص از منابع مختلف نویز یا پیشبینی کل نویز در یک منطقه استفاده میشود. هدف نقشه های راهبردی نویز ارائه واضح وضعیت نویز برای مقامات و شهروندان است تا بتوانند با همکاری یکدیگر تعداد افرادی را که در معرض سطوح غیرقابل قبول نویز قرار می گیرند کاهش دهند. سر و صدای محیطی هر ماه در شبکه ای از 16 مکان اندازه گیری که توسط موسسه بهداشت عمومی Vojvodina، نووی ساد انجام می شود، اندازه گیری می شود و شامل اندازه گیری مجموعه ای از پارامترها مانند میانگین جریان ترافیک است. بر اساس این پارامترها تخمینی از سطح نویز محاسبه می شود.
نقشههای استراتژیک نویز با استفاده از روشها و برنامههای محاسباتی برای محاسبه انتشار و انتشار نویز منتشر شده توسط منابع نویز شناخته شده در فضای جغرافیایی مشخصههای شناخته شده تولید میشوند. روش تهیه نقشه های استراتژیک نویز در آیین نامه نحوه تهیه و محتوای نقشه های استراتژیک نویز و نحوه ارائه آنها به مردم [78] و بر اساس دستورالعمل های ارائه شده در دستورالعمل اروپایی تعریف شده است.
لازمه اساسی این است که داده های لازم برای تهیه نقشه های استراتژیک نویز باید به گونه ای باشد که امکان پیاده سازی آسان آنها را در پایگاه داده GIS شهر و در نرم افزارهای در نظر گرفته شده برای توسعه نقشه های استراتژیک نویز فراهم کند. داده های لازم برای توسعه نقشه های استراتژیک نویز عبارتند از: مدل سه بعدی زمین دیجیتال، مدل سه بعدی ساختمان ها با هدف مرتبط با ساختمان ها، مدل نویز ناشی از ترافیک و مدل نویز ناشی از منابع صنعتی.
شرکت عمومی JP Urbanism از شهر نووی ساد پروژه توسعه نقشه استراتژیک نویز را به عنوان یک تعهد قانونی انجام داد [ 79 ]. شکل 15 a مدل سه بعدی مورد استفاده برای توسعه نقشه استراتژیک نویز را نشان می دهد. این مدل سهبعدی بر اساس دادههای دوبعدی بهدستآمده از پایگاه داده GIS شهر از ردپای ساختمان و ارتفاع ساختمانها که در طی بررسی میدانی اندازهگیری شدهاند، توسعه یافته است. برای آن اندازهگیریها، چهار کارمند و 50 روز کاری طول کشید تا منطقه تعریفشده توسط پروژه (که شامل محوطه دانشگاه و منطقه مسکونی به نام لیمان بود) را پوشش دهد. از طرف دیگر شکل 15 ب همان ناحیه را در CityGML نشان می دهد که با روش های توصیف شده قبلی تولید شده است.
نتیجهگیری و توصیهها در طول توسعه نقشه راهبردی نویز استفاده از تکنیکهای نقشه برداری هوایی است که امکان ثبت ارتفاع ساختمانها و ثبت دقیقتر پیکربندی زمین را فراهم میکند، که سرعت توسعه نقشه استراتژیک نویز را بسیار افزایش میدهد. از این نظر، یک روش پیشنهادی مبتنی بر نقشه برداری LiDAR و مدل های شهر سه بعدی مجازی می تواند کمک زیادی کند. علاوه بر این، نقشه راهبردی نویز باید به طور منظم به روز شود و با تغییرات محیط شهری همسو شود و در مواردی که از مقادیر حدی نویز فراتر رفته است، اقداماتی لازم است. همچنین، اندازهگیری نویز بلادرنگ توسط دستگاههای اینترنت اشیا را میتوان به عنوان جایگزین مشاهدات ذهنی بهدستآمده از طریق مصاحبه با شهروندان در مورد سطح نویز معرفی کرد.
5.2. مدل شهر سه بعدی مجازی و کاداستر سه بعدی
استفاده از قالبهای معنایی سه بعدی مانند CityGML و IFC برای کاداستر سه بعدی در صربستان قبلاً تحلیل شده است. رادولوویچ و همکاران [ 80 ] امکان تولید کاداستر سه بعدی مبتنی بر CityGML را بر اساس ردپاهای دوبعدی و پلان های طبقه و سایر داده های ویژگی که در دفاتر کاداستر ذخیره می شود، تجزیه و تحلیل کرد. کاداستر سه بعدی مبتنی بر IFC در صربستان برای ساختمان ها و واحدهای ساختمانی توسط Sladić و همکاران پیشنهاد شد. [ 75]. چنین دادههایی که توسط معماران و کشوهای فنی تولید میشوند، میتوانند برای اهداف کاداستر سهبعدی مورد استفاده مجدد قرار گیرند، جایی که برای نمایش ساختمانها و واحدهای ساختمانی آنها (کاندومینیوم، فضاهای تجاری و گاراژها) مؤثرتر است. با این حال، کاداستر سه بعدی در صربستان بر اساس داده های جمع آوری شده از نقشه برداری LiDAR هنوز پیشنهاد نشده است. مزیت اصلی چنین روش جمع آوری داده این است که می تواند داده های انبوه را اما بدون فضای داخلی جمع آوری و تولید کند.
سازمان کاداستر املاک و مستغلات و مشخصات LADM پیشنهادی برای صربستان توسط Radulović و همکاران شرح داده شده است. [ 80] و از دو نوع مجموعه داده تشکیل شده است: داده های حقوقی الفبایی عددی در مورد حقوق مالکیت و داده های مکانی. دادههای مکانی در کاداستر صربستان با استفاده از نقشههای کاداستر جغرافیایی ارجاعشده ارائه میشود که حاوی مرزهای دوبعدی قطعات و ساختمانها است، در حالی که دادههای مکانی در مورد واحدهای ساختمانی بهصورت طرحهایی مانند نقشههای طبقه دوبعدی نگهداری میشوند (معمولاً با استفاده از ابزار CAD در محلی ایجاد میشوند. دستگاه مختصات). با این تشبیه، مدلهای سه بعدی شهر در قالب CityGML میتوانند به عنوان یک نقشه کاداستر سهبعدی ساختمانها (که نسبتاً سریع با نقشه برداری انبوه LiDAR به دست میآید) در بالای لایه برداری 2 بعدی که بستهها را نشان میدهد استفاده شود، در حالی که فضای قانونی داخلی (واحدهای ساختمانی) ممکن است با استفاده از CityGML LOD4، IndoorGML، یا IFC نشان داده شده است. به منظور ارتباط با کاداستر سه بعدی، مجموعه دادههای CityGML و IndoorGML یا IFC باید به پایگاههای دادهای مرتبط شوند که حاوی دادههای الفبایی در مورد داراییها، حقوق مالکیت و دارندگان حق هستند. یکی از راههای دستیابی به این هدف، افزودن ویژگیهایی به فضاهای قانونی مناسب است که به طور منحصربهفردی یک فضای قانونی (مالکیت) را تعریف میکنند.
استاندارد CityGML قبلاً مکانیزمی را برای پیوند یک شی از یک مدل سه بعدی به یک شی متناظر در یک سیستم اطلاعاتی دیگر، مانند سیستم اطلاعات کاداستر، پیش بینی کرده است. این یک مرجع خارجی نامیده می شود که توسط کلاس ExternalReference نمایش داده می شود. اگر عنصر InformationSystem در ExternalReference وجود نداشته باشد، ExternalObjectReference باید یک URI باشد. ارجاع یک شی 3 بعدی به شی متناظر آن در یک مجموعه داده خارجی ضروری است، اگر یک به روز رسانی باید منتشر شود یا اگر داده های اضافی مورد نیاز است، برای مثال نام یا آدرس مالک یک ساختمان در یک سیستم اطلاعات کاداستر. برای ارائه چنین اطلاعاتی، هر شی CityGML ممکن است به مجموعه داده های خارجی با استفاده از مفهوم ExternalReference مراجعه کند.جدول 4 یک مرجع خارجی ساختمان را نشان می دهد که حاوی URI به سیستم اطلاعات کاداستر و نام شی خارجی است که در این مورد با شماره شناسایی ملک منحصر به فرد نشان داده می شود.
نقشههای رسمی کاداستر در صربستان حاوی دادههای فضایی دوبعدی در قالب برداری (CAD و GIS) از مرزها (ردپای) قطعات و ساختمانها هستند. برای تجزیه و تحلیل سازگاری چنین دادههایی با اشیاء سه بعدی بهدستآمده در CityGML، لازم است دادههای سه بعدی با دادههای فضایی دوبعدی رسمی مرزها همپوشانی شود. ناهماهنگی های هندسی را می توان با ارجاع جغرافیایی بر اساس نقشه رسمی کاداستر حل کرد. همچنین این احتمال وجود دارد (اگرچه نسبتاً نادر است) که یک بررسی LiDAR ممکن است اشیایی را نشان دهد که به طور مناسب در مجموعه دادههای رسمی کاداستر ذخیره نشدهاند (مثلاً گم شده یا تغییر کردهاند). این از طریق پیوند دادن اشیا به پایگاه داده کاداستر آشکار می شود و هر مورد باید به صورت جداگانه از طریق رویه های رسمی کاداستر حل شود. آژانس نقشه برداری در صربستان در حال حاضر از تصاویر ماهواره ای برای شناسایی ساختمان های غیرقانونی استفاده می کند که بدون مجوز ساختمان ساخته شده اند و در کاداستر املاک ثبت نشده اند، اما می تواند از این روش نیز بهره مند شود. نقشه برداری LiDAR همچنین ممکن است برای به روز رسانی داده ها در کاداستر املاک و مستغلات استفاده شود.
6. نتیجه گیری
در این مقاله، فرآیند جمعآوری دادهها توسط بررسی LiDAR، از طریق تبدیل ETL و پردازش دادهها تا توسعه مدل شهر مجازی سه بعدی را نشان دادیم. نتایج در مطالعه موردی منطقه پردیس دانشگاه نووی ساد، در نزدیکی قلعه پترووارادین و بخشی از مرکز شهر ارائه شده است. روش پیشنهادی در این مقاله منجر به 1204 مدل از ساختمانها میشود که مطابق با استاندارد CityGML در یک پایگاه داده توسعه یافته و ذخیره شدهاند. در مجموع 12 درصد کل مدل ها خانه، 3 درصد اشیاء کمکی، 3 درصد ساختمان های مسکونی و تجاری و بیشترین سهم مربوط به ساختمان ها با 82 درصد بوده است. ما بحث کردیم که چگونه می توان این نوع مدل سازی را در کاداستر سه بعدی و برنامه ریزی شهری مدرن اعمال کرد. کار آینده در دو جهت برنامه ریزی شده است. یکی بهبود فرآیند مدلسازی سهبعدی شهر برای شامل خودکارسازی فرآیند در صورت امکان، برای افزایش تجسم واقعگرایانه، توسعه کامل پایگاهداده سهبعدی شهر و پر کردن آن با ویژگیهای مربوطه و پیوند آن با سیستمهای اطلاعاتی مرتبط از قبل موجود، و غیره. جهت گسترش حوزه های کاربردهای بالقوه آن و ارائه زیرساخت کلی داده های فضایی سه بعدی برای شهرهای هوشمند آینده و برنامه های کاربردی مبتنی بر اینترنت اشیا در سطح شهر برای بهبود خدمات شهری در پاسخ به نیازهای شهروندان و رفاه و کیفیت آنها است. زندگی این شامل تجزیه و تحلیل دقیق تری از کاربرد ICT و IoT در بافت شهر هوشمند می شود. بخش اول شامل توسعه الگوریتم های مبتنی بر یادگیری ماشین برای کاهش قابل توجه زمان بین اکتساب داده و کاربرد آن است. قصد دستیابی به سطوح بلادرنگ یا نزدیک به زمان واقعی را دارند. بخش دوم به توسعه خدمات سه بعدی با قابلیت انتشار داده ها از طریق برنامه های کاربردی مبتنی بر وب و تخصصی شدن آنها در زمینه های خاص اشاره دارد.
منابع
- پریس-اورتیز، م. بنت، DR. یابار، DP-B. شهرهای هوشمند پایدار: ایجاد فضاهایی برای توسعه فناوری، اجتماعی و تجاری ؛ Springer: برلین/هایدلبرگ، آلمان، 2016; ISBN 9783319408958. [ Google Scholar ]
- هانت، دی. راجرز، سی. کاوادا، ام. شهرهای هوشمند: تعاریف متناقض و اقدامات نامشخص . MDPI Sciforum: بازل، سوئیس، 2014; پ. f004. [ Google Scholar ] [ CrossRef ]
- چاتورودی، ک. ماتئوس، ا. نگوین، SH; Kolbe، TH ایمن سازی زیرساخت های داده مکانی برای برنامه ها و خدمات شهر هوشمند توزیع شده. ژنرال آینده. محاسبه کنید. سیستم 2019 ، 101 ، 723-736. [ Google Scholar ] [ CrossRef ]
- کنسرسیوم فضایی باز در دسترس آنلاین: https://www.ogc.org/ (در 1 آوریل 2020 قابل دسترسی است).
- OGC SmartCity DWG. در دسترس آنلاین: https://www.ogc.org/projects/groups/smartcitiesdwg (در 1 آوریل 2020 قابل دسترسی است).
- الله، ز. الترجمان، ف. مستاردا، ال. گاگلیاردی، آر. کاربردهای هوش مصنوعی و یادگیری ماشینی در شهرهای هوشمند. محاسبه کنید. اشتراک. 2020 ، 154 ، 313-323. [ Google Scholar ] [ CrossRef ]
- راتور، م. پل، آ. هونگ، دبلیو. سئو، اچ. اعوان، من. سعید، س. بهرهبرداری از اینترنت اشیا و تجزیه و تحلیل دادههای بزرگ: تعریف شهر دیجیتال هوشمند با استفاده از دادههای شهری بلادرنگ. حفظ کنید. جامعه شهرها 2018 ، 40 ، 600-610. [ Google Scholar ] [ CrossRef ]
- احد، م. پایوا، اس. تریپاتی، جی. فیروز، ن. فناوریهای توانمند و شهرهای هوشمند پایدار. حفظ کنید. جامعه شهرها 2020 ، 1-12. [ Google Scholar ] [ CrossRef ]
- نینچویچ پاشالیچ، آی. کوکوشیچ، م. Jadrić، M. پیشرفت تحقیقات شهر هوشمند در جنوب شرقی اروپا. بین المللی J. Inf. مدیریت 2020 ، 102127، در دست چاپ. [ Google Scholar ]
- استاندارد رمزگذاری زبان جغرافیایی شهر OGC (CityGML) . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2012.
- OGC IndoorGML-with Corrigendum ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2018.
- مدل مفهومی OGC CityGML 3.0. در دسترس آنلاین: https://github.com/opengeospatial/CityGML-3.0CM (در 14 ژوئن 2020 قابل دسترسی است).
- کوتزنر، تی. چاتورودی، ک. Kolbe، TH CityGML 3.0: توابع جدید برنامه های جدید را باز می کند. PFG J. Photogramm. سنسور از راه دور Geoinf. علمی 2020 ، 88 ، 43-61. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Ślusarski، M. Jurkiewicz، M. تجسم عدم قطعیت داده های مکانی. مطالعه موردی یک پایگاه داده از اشیاء توپوگرافی. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 16. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- بونکزاک، بی. Kontokosta، CE پارامترسازی در مقیاس بزرگ مورفولوژی ساختمان های سه بعدی در مناظر پیچیده شهری با استفاده از LiDAR هوایی و داده های اداری شهر. محاسبه کنید. محیط زیست سیستم شهری 2019 ، 73 ، 126-142. [ Google Scholar ] [ CrossRef ]
- پارک، ی. Guldmann، JM ایجاد مدلهای سه بعدی شهر با ردپای ساختمان و طبقهبندی ابر نقطه LIDAR: رویکرد یادگیری ماشین. محاسبه کنید. محیط زیست سیستم شهری 2019 ، 75 ، 76-89. [ Google Scholar ] [ CrossRef ]
- هن، ا. گروگر، جی. استروه، وی. Plümer, L. بازسازی سقفها بر مبنای مدل از ابرهای پراکنده نقطه LIDAR. ISPRS J. Photogramm. Remote Sens. 2013 ، 76 ، 17-29. [ Google Scholar ] [ CrossRef ]
- آبایوا، BO; یلماز، ع. Hardie, RC ثبت خودکار تصاویر هوایی نوری در ابر نقطه LiDAR برای تولید مدل های شهری. ISPRS J. Photogramm. Remote Sens. 2015 ، 10 ، 68-81. [ Google Scholar ] [ CrossRef ]
- Biljecki، F. سطح جزئیات در مدل های سه بعدی شهر. Ph.D. Thesis, TU Delft, Delft, The Netherlands, 2017; پ. 353. [ Google Scholar ]
- گروگر، جی. Plümer, L. CityGML—مدل های شهری سه بعدی معنایی قابل تعامل. ISPRS J. Photogramm. Remote Sens. 2012 ، 71 ، 12-33. [ Google Scholar ] [ CrossRef ]
- گوبلز، اس. Pohle-Fröhlich، R. تکنیک ها برای مدل های بهبود یافته CityGML. نمودار. Models 2019 , 106 , 101044. [ Google Scholar ] [ CrossRef ]
- لی، ال. لو، اف. زو، اچ. یینگ، اس. Zhao, Z. یک مدل توپولوژیکی دو سطحی برای ویژگی های سه بعدی در CityGML. محاسبه کنید. محیط زیست سیستم شهری 2016 ، 59 ، 11-24. [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. مشخصات LOD بهبود یافته برای مدل های ساختمان سه بعدی. محاسبه کنید. محیط زیست سیستم شهری 2016 ، 59 ، 25-37. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بیلجکی، اف. لدوکس، اچ. استوتر، جی. ژائو، جی. رسمی سازی سطح جزئیات در مدل سازی سه بعدی شهر. محاسبه کنید. محیط زیست سیستم شهری 2014 ، 48 ، 1-15. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، ال. Duan، XQ; زو، اچ. Guo، RZ; Ying, S. بافت حجم معنایی برای تجسم مدل ساختمان شهر مجازی. محاسبه کنید. محیط زیست سیستم شهری 2015 ، 54 ، 95-107. [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. لدوکس، اچ. Stoter, J. تولید مدل های سه بعدی شهر بدون داده های ارتفاع. محاسبه کنید. محیط زیست سیستم شهری 2017 ، 64 ، 1-18. [ Google Scholar ] [ CrossRef ]
- تانگ، ال. یینگ، اس. لی، ال. بیلجکی، اف. Su, F. یک الگوی مدلسازی LOD مبتنی بر کاربرد برای مدلهای ساختمان سه بعدی. ISPRS J. Photogramm. Remote Sens. 2020 , 16 , 194–207. [ Google Scholar ] [ CrossRef ]
- بیلجکی، اف. استوتر، جی. لدوکس، اچ. زلاتانوا، اس. Çöltekin، A. کاربردهای مدل های سه بعدی شهر: بررسی وضعیت هنر. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2842-2889. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تانگ، ال. لی، ال. یینگ، اس. Lei, Y. مشخصات کامل سطح جزئیات برای مدلهای ساختمانهای سه بعدی با ترکیب صحنههای داخلی و خارجی. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 419. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مونسالوته، پ. رابینسون، دی. ایکر، روشهای شبیهسازی دینامیکی U. برای تقاضای انرژی شهری. Energy Procedia 2015 ، 78 ، 3360-3365. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آگوجیارو، جی. استانداردهای مدلسازی داده باز برای شبیهسازی انرژی در سطح شهر. سیستم انرژی شهری شهرهای کم کربن 2019 ، 1 ، 241–255. [ Google Scholar ]
- چن، ی. هانگ، تی. لو، ایکس. Hooper, B. توسعه مجموعه داده های ساختمان های شهری برای مدل سازی انرژی ساختمان های شهری. انرژی ساخت. 2019 ، 183 ، 252-265. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پایهو، اس. کتوماکی، جی. کناری، ل. هاکینن، تی. Shemeikka, J. یک روش جدید برای ارزیابی نوسازی با انرژی کارآمد ساختمان ها در مقیاس منطقه. حفظ کنید. جامعه شهرها 2019 ، 46 ، 101454. [ Google Scholar ] [ CrossRef ]
- مائو، بی. بان، ی. Laumert, B. Dynamic Online Visualization 3D Framework برای شبیه سازی انرژی در زمان واقعی بر اساس کاشی های سه بعدی. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 166. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مرشد، اس ام. پیکارد، اس. Koch، A. مدلسازی، اعتبار سنجی و کمی سازی اقلیم و سایر حساسیت های مدل انرژی ساختمان در مدل های سه بعدی شهر ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 447. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وانگ، ک. Siebers، PO; رابینسون، دی. به سوی شبیهسازی عمومی سیستمهای انرژی شهری. Procedia Eng. 2017 ، 198 ، 366-374. [ Google Scholar ] [ CrossRef ]
- واتنباخ، ام. ردویک، آر. لودکه، اس. کوستر، بی. ناگل، سی. عدم قطعیت در موجودی گازهای گلخانه ای شهر. Energy Procedia 2015 ، 76 ، 388-397. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جوسف، SK; موسو، بی. گادفروید، جی. Hui، VSJ مدل سازی یکپارچه CityGML و IFC برای توسعه شهر/محله برای تجزیه و تحلیل ریزاقلیم شهری. Energy Procedia 2017 ، 122 ، 145-150. [ Google Scholar ] [ CrossRef ]
- ایکر، یو. نوول، آر. دومینیل، ای. Coors، V. ارزیابی منابع انرژی خورشیدی غیرفعال و فعال در شهرها با استفاده از مدل های سه بعدی شهر. Energy Procedia 2014 ، 57 ، 896-905. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ایکر، یو. زیرک، م. بارتکه، ن. رودریگز، ال آر. Coors، V. شبیه سازی انرژی شهری مبتنی بر مدل سه بعدی جدید برای مفهوم حفاظت از آب و هوا. انرژی ساخت. 2018 ، 163 ، 79-91. [ Google Scholar ] [ CrossRef ]
- گودژ، ک. پاچلسکی، دبلیو. ون اوستروم، پی. Coors, V. امکانات استفاده از CityGML برای نمایش سه بعدی ساختمانها در کاداستر. در مجموعه مقالات چهارمین کارگاه بین المللی کاداسترهای سه بعدی، دبی، امارات متحده عربی، 9 تا 11 نوامبر 2014. صص 339-362. [ Google Scholar ]
- رونزدورف، سی. ویلسون، دی. Stoter، J. ادغام مدل دامنه مدیریت زمین با CityGML برای کاداستر سه بعدی. در مجموعه مقالات چهارمین کارگاه بین المللی کاداسترهای سه بعدی، دبی، امارات متحده عربی، 9 تا 11 نوامبر 2014. صص 313-322. [ Google Scholar ]
- روشلاوب، آر. Batscheider, J. یک مدل ساختمان سه بعدی مطابق با INSPIRE از بایرن با استفاده از اطلاعات کاداستر، Lidar و تطبیق تصویر. ISPRS—Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی XLI-B4 2016 ، 41 ، 747–754. [ Google Scholar ] [ CrossRef ]
- لمن، سی. ون اوستروم، پی. Bennett, R. مدل دامنه مدیریت زمین. سیاست کاربری زمین 2015 ، 49 ، 535-545. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چاگداش، V. گسترش دامنه کاربردی به CityGML برای مالیات بر اموال غیر منقول: مطالعه موردی ترکیه. بین المللی J. Appl. زمین Obs. Geoinf. 2013 ، 21 ، 545-555. [ Google Scholar ] [ CrossRef ]
- لی، ال. لی، ی. تانگ، ال. یان، اف. Zhu, H. یک مدل داده فضایی سه بعدی از حقوق خورشیدی مرتبط با املاک مسکونی فردی. محاسبه کنید. محیط زیست سیستم شهری 2019 ، 7 ، 88–99. [ Google Scholar ] [ CrossRef ]
- لی، ال. وو، جی. زو، اچ. دوان، ایکس. Luo, F. مدلسازی سه بعدی ساختار مالکیت واحدهای کاندومینیوم. محاسبه کنید. محیط زیست سیستم شهری 2016 ، 59 ، 50-63. [ Google Scholar ] [ CrossRef ]
- کیتساکیس، دی. کلانتری، م. رجبی فرد، ع. عطازاده، ب. دیموپولو، ای. کاوش در بعد سوم در محدودیت های حقوق عمومی: مطالعه موردی ویکتوریا، استرالیا. سیاست کاربری زمین 2019 ، 85 ، 195-206. [ Google Scholar ] [ CrossRef ]
- سان، ج. می، اس. اولسون، پی. پالسون، جی. Harrie, L. استفاده از BIM و GIS برای نمایش و تجسم کاداستر سه بعدی. SPRS Int. J. Geo-Inf. 2019 ، 8 ، 503. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- آیین، ا. رجبی فرد، ع. کلانتری، م. شجاعی، د. تلفیق ابعاد حقوقی و کالبدی محیط های شهری. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 1442-1479. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رادولوویچ، آ. گووداریکا، م. پرژولج، ج. توصیه برای توسعه کاداستر سه بعدی. در مجموعه مقالات کنگره ژئودتیک صربستان، بلگراد، صربستان، 1-3 دسامبر 2011; مرجع زمینشناسی جمهوری: بلگراد، صربستان، 2011. [ Google Scholar ]
- اسلادیچ، دی. رادولوویچ، آ. Govedarica، M. توسعه مدل فرآیند برای کاداستر صربستان. سیاست کاربری زمین 2020 ، 22 ، 104273، در دست چاپ است. [ Google Scholar ]
- ایکر، یو. ویلر، وی. شوماخر، جی. براون، آر. در مورد طراحی یک پلت فرم داده و مدل سازی شهری و کاربرد آن در تجزیه و تحلیل ناحیه شهری. انرژی ساخت. 2020 ، 13 ، 109954، در دست چاپ. [ Google Scholar ] [ CrossRef ]
- اگوسکویزا، ا. پریتو، آی. ایزکارا، جی ال. Béjar, R. مدل های داده های شهری چند مقیاسی برای ارزیابی مناسب بودن مراحل اولیه اقدامات حفاظت از انرژی در مناطق شهری تاریخی. انرژی ساخت. 2018 ، 164 ، 87-98. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پیسپیدیکیس، آی. Dimopoulou، E. CityGML Restful Web Service: بازیابی خودکار داده های CityGML بر اساس معناشناسی آنها. اصول، رهنمودها و طراحی مفهومی ساختمان. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، 4 ، 49-56. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بویوکصالح، جی. بسکاراکا، پ. بایبورت، اس. بویوکصالح، آی. عبدالرحمن، الف. مدلسازی سه بعدی شهر استانبول بر اساس داده های لیدار و تصاویر پانوراما – مسائل و چالش ها. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، 4 ، 51–59. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Axelsson، P. پردازش دادههای اسکنر لیزری – الگوریتمها و کاربردها. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 138-147. [ Google Scholar ] [ CrossRef ]
- Axelsson، P. DEM تولید از دادههای اسکنر لیزری با استفاده از مدلهای TIN تطبیقی. بین المللی قوس. فتوگرام Remote Sens. 2000 , 33 , 110-117. [ Google Scholar ]
- Elaksher، AF با استفاده از DEM مبتنی بر LIDAR برای تصحیح تصاویر پانکروماتیک IKONOS. انتخاب کنید مهندسی لیزر 2009 ، 47 ، 629-635. [ Google Scholar ] [ CrossRef ]
- لیو، ایکس. ژانگ، ز. پیترسون، جی. Chandra، S. LiDAR اطلاعات کنترل زمین با کیفیت بالا و DEM برای تصحیح تصویر. Geoinformatica 2007 ، 11 ، 37-53. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اداره ژئودتیک جمهوری صربستان، کلید توپوگرافی دیجیتال. 2005. در دسترس آنلاین: https://www.grf.bg.ac.rs/p/learning/digitalni_topografski_kljuc_1463993460069.pdf (دسترسی در 5 آوریل 2020).
- کلبه، تی. گروگر، جی. Plümer, L. CityGML: دسترسی متقابل به مدل های سه بعدی شهر. در اطلاعات جغرافیایی برای مدیریت بلایا ؛ Van Oosterom، P.، Zlatanova، S.، Fendel، EM، Eds. Springer: برلین/هایدلبرگ، آلمان، 2005; صص 883-899. [ Google Scholar ]
- بیلجکی، اف. لدوکس، اچ. استوتر، جی. ووسلمن، جی. انواع LOD یک مدل ساختمانی سه بعدی و تأثیر آنها بر تحلیل های فضایی. ISPRS J. Photogramm. Remote Sens. 2016 ، 116 ، 42-54. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- روتزینگر، ام. روتنشتاینر، اف. Pfeifer, N. مقایسه تکنیک های ارزیابی برای استخراج ساختمان از اسکن لیزری هوابرد. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2009 ، 2 ، 11-20. [ Google Scholar ] [ CrossRef ]
- اوستروفسکی، دبلیو. پیلارسکا، ام. چاریتون، جی. باکولا، ک. تجزیه و تحلیل دقت مدل های ساختمانی سه بعدی بر اساس ابرهای نقطه اسکن لیزری هوابرد. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، 2 ، 797-804. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- صراف، ن.م. حمید، JRA; حلیم، MA; رسام، آرا; Lin, S. ارزیابی دقت استخراج سه بعدی ساختمان LiDAR. در مجموعه مقالات چهاردهمین کنفرانس بین المللی IEEE در مورد پردازش سیگنال و کاربردهای آن، پنانگ، مالزی، 9 مه 2018. [ Google Scholar ]
- روتنشتاینر، اف. سون، جی. گرکه، ام. وگنر، پروژه آزمایشی JD ISPRS در طبقه بندی شهری و بازسازی ساختمان های سه بعدی. در گروه کاری ISPRS-Commission III-Photogrammetric Computer Vision and Image Analysis III/4 – Analysis Scene 3D ; ISPRS: پاریس، فرانسه، 2013; صص 1-16. [ Google Scholar ]
- تروونگ-هنگ، ال. Laefer، استراتژی های ارزیابی کمی DF برای تولید مدل سه بعدی شهری از داده های سنجش از دور. محاسبه کنید. نمودار. 2015 ، 49 ، 82-91. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دورنینگر، پی. Pfeifer, N. یک رویکرد سه بعدی خودکار جامع برای استخراج، بازسازی و منظم سازی ساختمان از ابرهای نقاط اسکن لیزری هوابرد. Sensors 2008 , 8 , 7323-7343. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دستورالعمل های ASPRS گزارش گیری دقت عمودی برای داده های Lidar. در دسترس آنلاین: https://www.asprs.org/wp-content/uploads/2015/01/Vertical_Accuracy_Reporting_for_Lidar_Data.pdf (در 15 ژوئیه 2020 قابل دسترسی است).
- Pang، G. تشخیص دورافتاده و فیلتر داده در دادههای LiDAR با ویژگیهای متعدد. Ph.D. پایان نامه، دانشگاه پلی تکنیک هنگ کنگ، هنگ کنگ، 2011. [ Google Scholar ]
- متکان، ع. حاجب، م. میرباقری، ب. صادقیان، س. احمدی، م. تحلیل فضایی برای حذف پرت از داده های LiDAR. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2014 ، 40 ، 187-190. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دوریک، بی. مؤسسه برنامه ریزی شهری و فضایی وویودینا 1950-2004، مونوگراف ; موسسه برنامه ریزی شهری و فضایی وویودینا: نووی ساد، صربستان، 2004. [ Google Scholar ]
- روزنامه رسمی جمهوری صربستان، شماره 72/2009، قانون برنامه ریزی و ساخت و ساز. در دسترس آنلاین: https://www.zavurbvo.co.rs/doc/Zakon_o_planiranju_i_izgradnji.pdf (دسترسی در 5 آوریل 2020).
- اسلادیچ، دی. گووداریکا، م. Radulović، A. راه حلی برای مدیریت کارآمد داده های GIS در برنامه ریزی شهری. در مجموعه مقالات یازدهمین کنفرانس بین المللی ژئوکنفرانس علمی چند رشته ای SGEM، آلبنا، بلغارستان، 1 مه 2011. [ Google Scholar ]
- دستورالعمل نویز محیطی (2002/49/EC). در دسترس آنلاین: https://ec.europa.eu/environment/archives/noise/directive.htm (دسترسی در 5 آوریل 2020).
- روزنامه رسمی جمهوری صربستان، شماره 36/09، 88/10. قانون حفاظت در برابر صدا در محیط زیست. در دسترس آنلاین: https://www.paragraf.rs/propisi/zakon_o_zastiti_od_buke_u_zivotnoj_sredini.html (دسترسی در 5 آوریل 2020).
- روزنامه رسمی جمهوری صربستان، شماره 80/10، آیین نامه محتوا و روش های تهیه نقشه های استراتژیک نویز و نحوه ارائه آنها به عموم. در دسترس آنلاین: https://www.pravno-informacioni-sistem.rs/SlGlasnikPortal/eli/rep/sgrs/ministarstva/pravilnik/2010/80/2/reg (در 5 آوریل 2020 قابل دسترسی است).
- نقشه استراتژیک نویز برای بخشی از نووی ساد-لیمان . JP Urbanizam: نووی ساد، صربستان، 2014.
- رادولوویچ، آ. اسلادیچ، دی. Govedarica، M. به سوی کاداستر سه بعدی در صربستان: توسعه مدل دامنه کاداستر صربستان. ISPRS Int. J. GeoInf. 2017 ، 6 ، 312. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
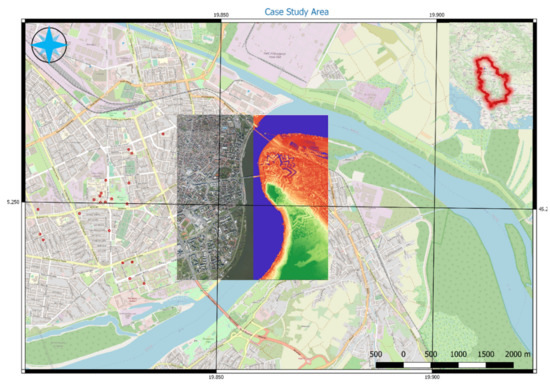
شکل 1. منطقه مورد مطالعه با DTM 0.5 متر و Orthophoto 0.1 m/pix.
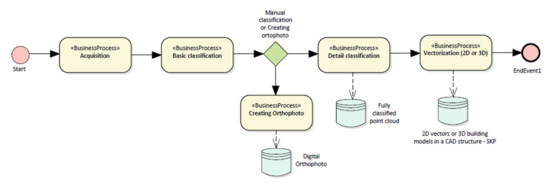
شکل 2. مراحل اولیه پردازش.
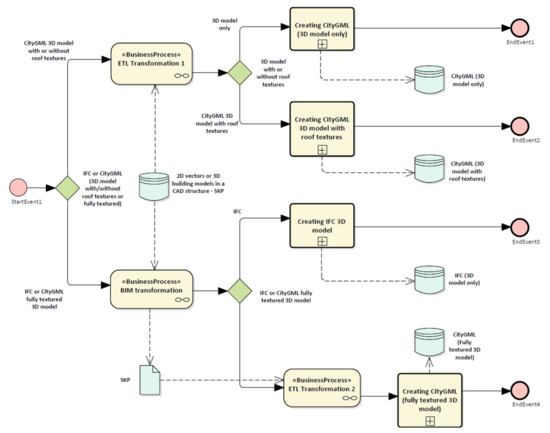
شکل 3. گردش کار تعریف شده از فرآیند تبدیل داده ها.
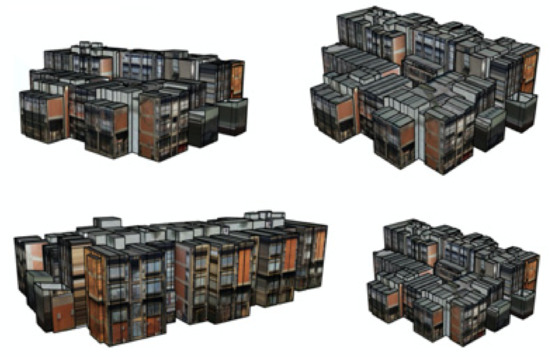
شکل 4. مدل سه بعدی ساختمان دانشکده فلسفه و حقوق دانشگاه نووی ساد در محوطه دانشگاه.
شکل 5. گردش کار از SKP به تغییر قالب زبان نشانه گذاری جغرافیایی (GML).
شکل 6. طرح تبدیل ETL 2 برای مدل فوتورئالیستی SKP ایجاد شده در ابزار BIM به فرمت GML.

شکل 7. مدل سه بعدی در فرمت GML ( a ) و فرمت IFC ( b ).
شکل 8. تبدیل از ساختار 3D CAD به مدل GML با یا بدون بافت سقف.
شکل 9. طرح تبدیل ETL برای مدل های CAD برداری شده به مدل GML بدون بافت.
شکل 10. طرح تحول ETL برای افزودن بافت سقف ها از تصاویر ارتوفتو به مدل های ساختمانی که قبلاً در استاندارد CityGML ایجاد شده بودند.

شکل 11. نمایی از مدل پردیس سه بعدی در استاندارد CityGML با ویژگی های مرتبط به هر شیء در Cesium JS Web Map Client ( https://geoinformatika.uns.ac.rs/index.php/en/virtual-campus/ ) .
شکل 12. نمای مدل سه بعدی با ویژگی های مربوطه در جدول 2 مطابق با استاندارد CitiGML نمایش داده شده در FME Data Inspector.
شکل 13. نمای مدل سه بعدی با ویژگی های مربوطه در جدول 2 مطابق با استاندارد CitiGML نمایش داده شده در سرویس گیرنده نقشه وب Cesium JS.
شکل 14. پرواز کالیبراسیون بر فراز نووی ساد ( a )، گزارش کنترل زمینی ( ب ).
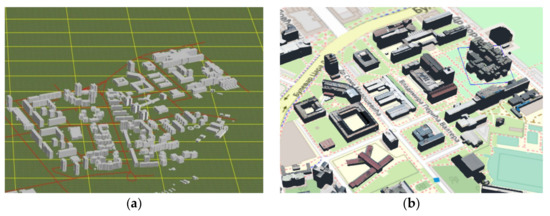
شکل 15. مدل سه بعدی استفاده شده ( a ) [ 56 ]، مدل مبتنی بر CityGML ( b ).


بدون دیدگاه