

سیستم کنترل مسیر پرواز خودکار برای پهپادها در مدیریت ترافیک شهر هوشمند
چکیده

کلید واژه ها:
پهپادهای خودمختار ؛ پهپاد ; مسیر پرواز خودمختار ; شبیه سازی حرکت معکوس ; ادغام شهر هوشمند
1. مقدمه
-
تعریف شبکه های پروازی، شبکه ایمن مسیرهای پروازی مورد نظر،
-
توسعه قوانین اساسی ترافیک (به عنوان الزامات جداسازی) و مسیر (مسیر پرواز) کنترل زیر،
-
توسعه یک سری از روش ها، راه حل ها برای پرواز ایمن (مانند تشخیص و حل تعارض، پروازهای گروهی، مدل های پیروی از پهپاد و غیره).
2. ایده اصلی – مواد پشتیبانی
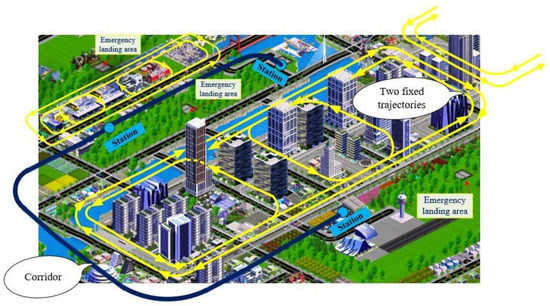
2.1. مفهوم عملیاتی
2.2. راه هوایی-شبکه
2.2.1. بخش بندی
-
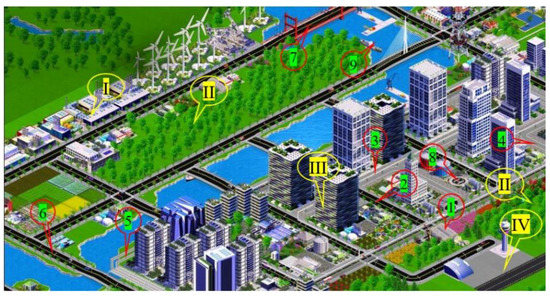
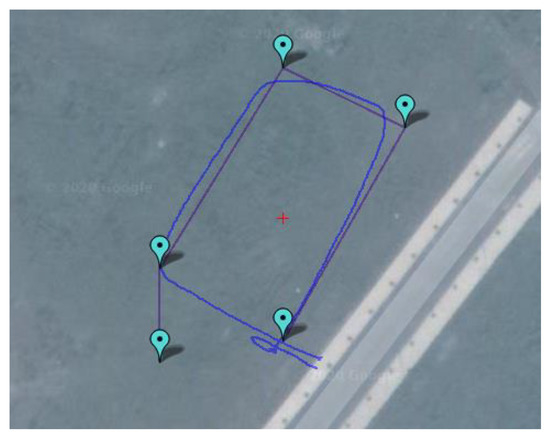
بخش جغرافیایی: مناطق اختصاصی تعریف شده بر روی نقشه (نگاه کنید به شکل 4 ).
-
بخش ها در جداسازی عمودی: بخش بندی را می توان در جهت عمودی اعمال کرد، به عنوان مثال، بخش های بین ساختمان های بزرگ و بالای آنها.
-
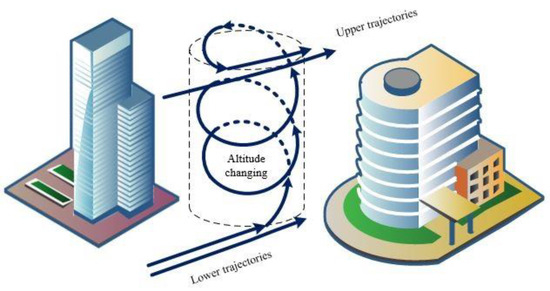
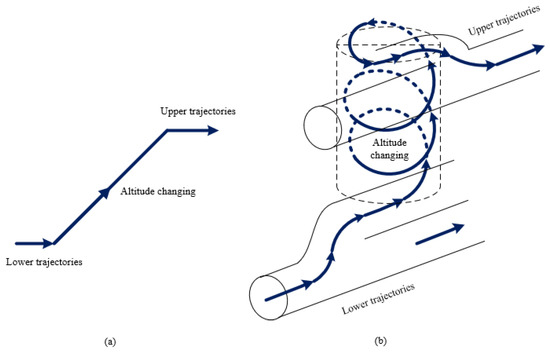
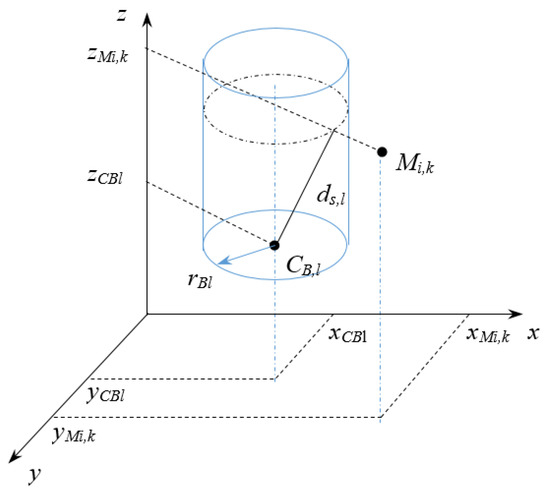
بخش هایی برای حرکت عمودی: حرکت عمودی پهپادها، به عنوان مثال، پرواز به سمت بالا (بالا رفتن) یا پایین (نزول)، می تواند به عنوان بلند کردن کوپترها یا پرواز در یک مارپیچ برای پهپادهای بال ثابت تحقق یابد. بنابراین، یک استوانه خاص منطقه را برای تغییرات ارتفاع تعریف می کند ( شکل 5 را ببینید ).
-
به هر دلیل اساسی می توان بخش هایی را برای مناطق ممنوعه تعریف کرد.
2.2.2. عناصر معمولی
2.3. جنبه های ایمنی و امنیتی
2.3.1. قوانین ایمنی اعمال شده در تعریف Airways
-
تعیین محدودیت سرعت به 30 متر بر ثانیه برای راهروها، 20 متر بر ثانیه برای پهپادهایی که در مسیرهای ثابت در حداقل 20 متر از هر زیرساخت (ساختمان) پرواز می کنند، و 10 متر بر ثانیه برای پهپادهایی که 20 متر نزدیکتر (اما 5 متر) حرکت می کنند. دور) از زیرساخت.
-
جداسازی طولی توصیه شده پهپاد در یک مسیر ثابت به سرعت، تفاوت در سرعت ها و سطح همکاری بین پهپادهای داده شده بستگی دارد. “زمان” جداسازی طولی مقدماتی باید حداقل یک ثانیه به اضافه یک ثانیه اضافی با هر 10 متر بر ثانیه سرعت پرواز در ثانیه باشد، برای وسایل نقلیه غیرهمکاری که باید زمانی افزایش یابد که پهپاد دنبال کننده ( i + 1) دارای سرعت بیشتری باشد. سرعت، Δ v (m/s) با پهپاد پیشرو (i -th) برای Δ v /3 در ثانیه مقایسه می شود. در مورد پهپادهای تعاونی، زمان جداسازی طولی را می توان 30-40٪ (بسته به شدت واقعی تلاطم هوا) و برای حالت پرواز سازند، 30٪ دیگر کاهش داد.
-
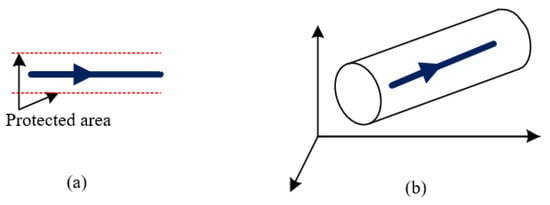
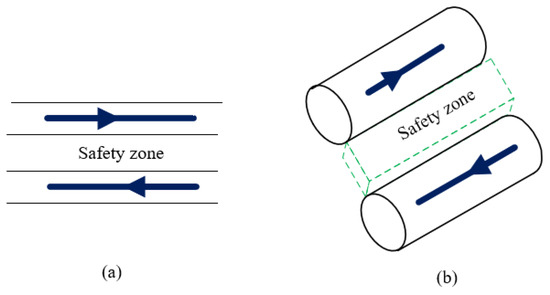
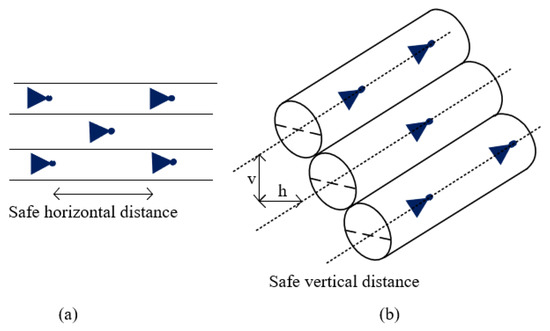
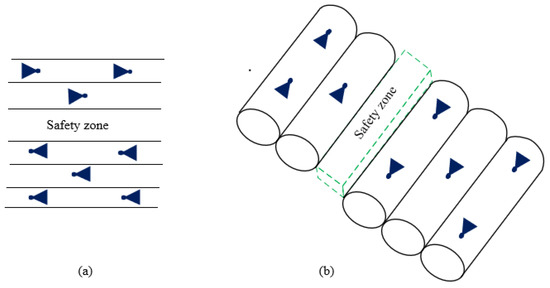
جداسازی جانبی (جهت افقی و عمودی) با شکل هایی تعریف می شود که عناصر معمولی توصیه شده راه های هوایی را نشان می دهد. به عنوان یک قاعده کلی، فاصله افقی و عمودی بین مرکز ثقل پهپادها که در یک جهت حرکت می کنند باید 5 تا 8 برابر حداکثر ابعاد آنها باشد. اگر هواپیماهای بدون سرنشین در جهت مخالف پرواز کنند، باید یک فاصله امن خاص برابر با یک خط خالی اعمال شود.
-
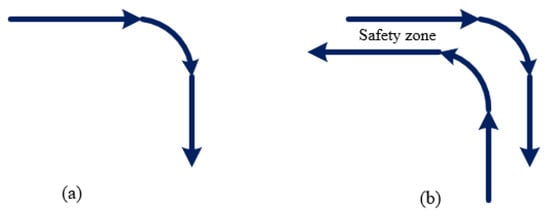
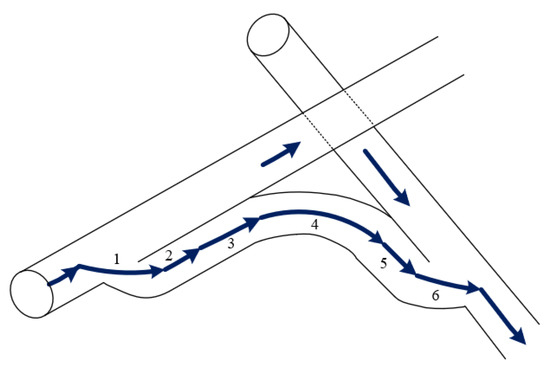
راه های هوایی و کل شبکه باید از عناصری تشکیل شده باشد که در بالا توضیح داده شد ( بخش 2.2 )، و هواپیماهای بدون سرنشین ممکن است خطوط را فقط در جهت افقی یا عمودی تغییر دهند.
-
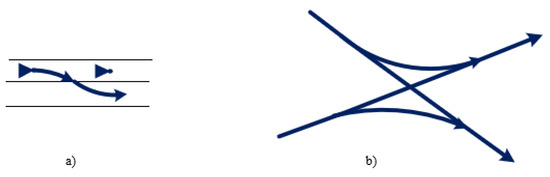
مسیر تعریف شده به عنوان یک کانال برای پهپاد معین ثابت است و نمی تواند از هیچ مسیر دیگری عبور کند.
2.3.2. فضای امن، طراحی شبکه راه هوایی
2.3.3. عملیات سیستم
2.3.4. جنبه های امنیتی
-
امنیت سایبری: به عنوان یک مشکل کلی وسایل نقلیه بسیار خودکار و خودمختار. اشیاء دارای سیستم های اطلاعاتی و مدیریتی بزرگ و متمرکز.
-
استفاده از هواپیماهای بدون سرنشین به عنوان سلاح برای اقدامات غیرقانونی؛
-
پرواز به مناطق ممنوعه؛
-
حمله به هواپیماهای بدون سرنشین با استفاده از سلاح، تفنگ، سلاح.
-
نظارت اولیه (غیرفعال): با استفاده از سیستم های نوری و مایکروویو ثابت، حسگرها، گیرنده هایی که در امتداد مسیرهای ثابت، کانال ها، راهروها در محیط شهری ادغام می شوند و با استفاده از رادارهای نظارت ثابت بزرگتر و پهپادهای متحرک برای شناسایی بیشتر (پروازهای پهپادی).
-
نظارت ثانویه (فعال): توسعه و اجرای مینی فرستنده هایی که ممکن است با سیستم نظارت در فاصله کم، تا 600 متر همکاری کنند. عناصر سیستم باید در منطقه شهری در امتداد مسیرهای ثابت، کانال ها، راهروها یکپارچه شوند.
-
سیستم ارتباط امن: همانطور که معرفی شد، مبتنی بر اینترنت/ابر با پروتکل امنیتی خاص با استفاده از سیستم کدگذاری در حال تغییر مداوم و شناسایی امنیتی پهپاد قادر به تشخیص ناهنجاریهای احتمالی در ارتباطات یا حملات سایبری بالقوه است.
-
کنترلر امنیتی داخلی – سطح اول: دستگاه منحصر به فردی که از ورود به مناطق محدود جلوگیری می کند.
-
کنترلکننده امنیتی داخل هواپیما-سطح دوم: دستگاههایی که هرگونه مشکل امنیتی، حمله و فرود اجباری پهپاد را در نزدیکترین منطقه فرود اضطراری آغاز میکنند.
-
سیستم دفاعی و حفاظتی: که به عنوان بخشی از کل سیستم مدیریت ترافیک هواپیماهای بدون سرنشین، به طور خودکار نقض احتمالی منطقه دفاعی را برای حمله / رهگیری / انهدام پهپادهای شناسایی شده شکست خورده یا در حال پرواز غیرقانونی شناسایی می کند.
2.4. تعریف سیستم
-
اشیاء شناسایی نشده: که در صفحه نظارت ظاهر نمی شوند.
-
اشیاء شناسایی شده: که در صفحه نظارت ظاهر می شوند، اما مشخص نیست که آیا منفعل است، همکاری نمی کند، یا هدف غیر مرتبط را نشان می دهد، مانند پرندگان.
-
اشیاء مشارکتی نیمه فعال یا ساده: که حداقل اطلاعاتی را در اختیار مرکز عملیات قرار می دهند.
-
اشیاء فعال یا همکار یا ارائه دهندگان خدمات: که اطلاعات مربوط به اشیاء فعال در شهر را گزارش می دهند، اطلاعات موجود باید حاوی داده هایی در مورد نوع وسیله نقلیه، شماره شناسایی آن، بارگذاری موقعیت لحظه ای، هدف و مقصد نهایی باشد.
-
اتصال وسایل نقلیه ای که با هم همکاری می کنند و حرکات آنها را به صورت منفعل یا فعال هماهنگ می کنند، به عنوان مثال، در حال حرکت، یا با استفاده از تشخیص و حل تعارض بر اساس اطلاعات مبادله شده.
-
پهپادهای مبتنی بر قرارداد که دارای برخی ترجیحات هستند، که مبتنی بر قرارداد است و باید هزینه خدمات ارائه شده را پرداخت کند.
3. روش ها
3.1. ابزارهای فیوژن سنسور در پشتیبانی از سیستم خودمختار
3.2. مسیر مورد نظر پس از مدیریت
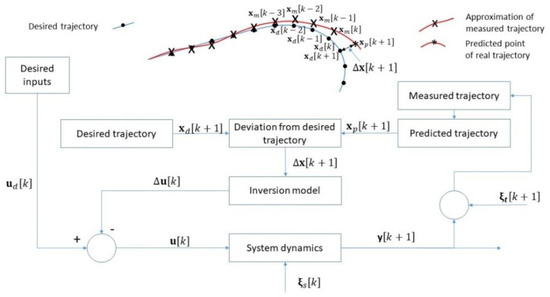
در یک مورد سادهشده، روشهای مسیر زیر ممکن است مبتنی بر یک نمایش حالت-فضای متغیر زمانی گسسته حرکت هواپیمای بدون سرنشین باشد:
که در آن x ، y ، u ، z بردارهای حالت، خروجی، ورودی (کنترل) و محیطی هستند، A ، B ، C ، D ماتریس های حالت (یا سیستم)، کنترل، خروجی و ورودی (یا پیشخور) هستند، و k متغیر زمان است.
فرض کنید تودبه عنوان کنترل مورد نظر پهپاد را در مسیر حرکت نگه می دارد و مجموعه ای از قبلا اندازه گیری شده است ایکس[ک]،z[ک]، y[ک]موجودند. ماتریس های واقعی A ، B ، C ، D را می توان با بردارهای حالت و محیطی تعریف کرد. ایکس[ک]،z[ک]، در حالی که بردارهای حالت و خروجی، ایکس[ک]،y[ک]می توان برای تعیین پیش بینی بردار حالت آینده استفاده کرد، ایکسپ[ک+1]. تفاوت در مشخصه های مسیر پیش بینی شده و مورد نظر می تواند برای تعیین تغییرات مورد نیاز در ورودی مورد نظر برای بازگشت پهپاد به مسیر ثابت از پیش تعریف شده استفاده شود. با اعمال این رویکرد در رابطه (1)، به موارد زیر منجر می شود:
و
3.3. فرآیند دنبال کردن
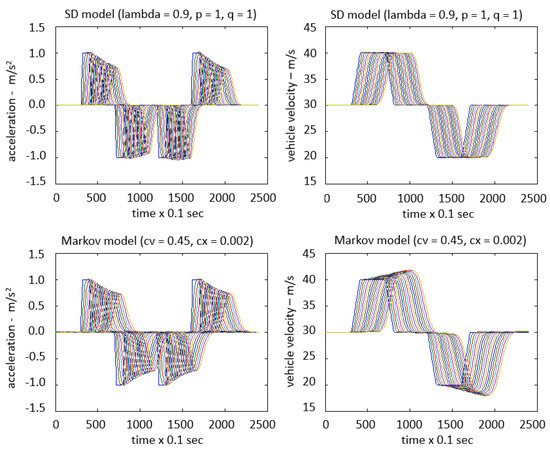
مدل SD به صورت زیر ارائه شده است:
جایی که، ایکسn(تی+تی)شتاب n- امین پهپاد پس از واکنش.
مدل مارکوف بر اساس تقریب فرآیند تصادفی تصمیم گیری سرعت است. یک مزیت نسبت به مدل SD این است که ورودی های کنترلر دارای سرعت ها و انحرافات مختلف در فاصله نسبی بین پهپادها هستند که می توان آن ها را به شرح زیر توصیف کرد:
جایی که، جvو جایکس- ضرایب بسته به زمان، هواپیماهای بدون سرنشین و کنترلرها.
3.4. روش اجتناب از موانع
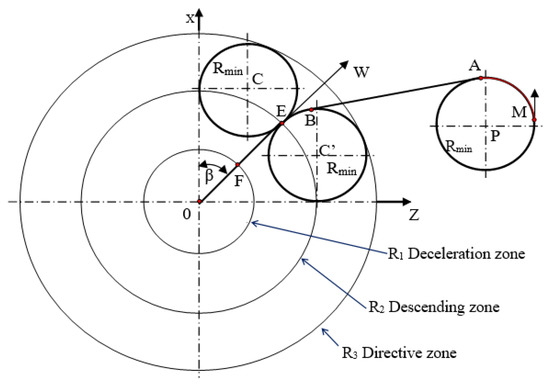
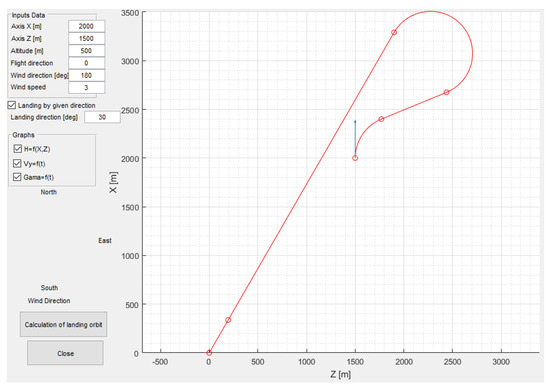
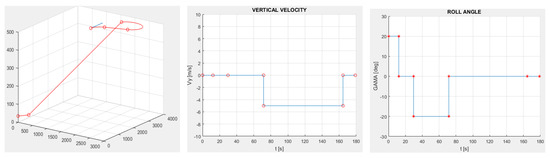
3.5. مدار فرود مورد نظر برای پهپادها
-
منطقه کاهش سرعت: این کوچکترین دایره در صفحه افقی است که شامل برجستگی مدار پهپاد است که با کاهش سرعت در طول نزدیک شدن به فرود مستقیم پرواز می کند. سپس، شکل ناحیه کاهش سرعت دایره ای با مرکز 0 و شعاع R 1 است .
-
منطقه نزولی: این کوچکترین دایره در صفحه افقی است که شامل برآمدگی مدار پهپاد است که در روند کاهش ارتفاع پرواز می کند. این ناحیه دایره ای با مرکز 0 و شعاع R 2 است .
-
ناحیه هدایت: این کوچکترین دایره در صفحه افقی است که شامل دو دایره با شعاع Rmin است . دو دایره مماس بر یکدیگر در خلاف جهت باد.
4. نتایج
4.1. فرآیند پیگیری هواپیماهای بدون سرنشین در جریان ترافیک
4.2. نتایج آزمایش سیستم مدیریت پهپاد
4.3. محاسبه مدارهای فرود مورد نظر برای پهپادها
5. بحث
-
فاصله ایمن نه تنها پهپاد مستقیم در جلو بلکه دو پهپاد در کنار آن اندازه گیری می شود.
-
خروجی های کنترل کننده بر اساس تخمین وضعیت سیستم در یک زمان خاص است که می توان از آن برای کنترل پهپادهای زیر استفاده کرد.
-
چندین موقعیت، مانند افزایش یا کاهش تعداد پهپادهای شرکت کننده در جریان ترافیک، باید برای ارزیابی دقیقتر عملکرد مدلهای SD و همچنین مدل مارکوف معرفی شوند.
-
طراحی و انجام یک مطالعه تجربی برای جمع آوری اطلاعات کمی در مورد عملکرد پهپاد در فضا که در آن یک پهپاد نمی تواند از دیگری عبور کند، ضروری است.
-
سازماندهی و مدیریت شبکه هوایی که سنگ بنای ادغام ایمن پهپادها بوده است. به طور خاص، طبقه بندی شبکه هوایی از نظر عملیات یکپارچه پهپاد در فضاهای هوایی کنترل شده و کنترل نشده بهبود یافته است.
-
مدیریت مسیر پهپاد: با توجه به عملیات پیشرفته مفاهیم آینده، مدیریت مسیر پهپاد منعطف و قدرتمند در زمینه حمل و نقل هوایی شهری با هدایت و کنترل بر مسیر توصیه می شود.
-
فناوری و بهبود سیستم هنوز فضای زیادی برای توسعه ارتباطات، الگوریتمهای کنترل و برنامهریزی مسیر برای پشتیبانی از عملیات پهپاد کارآمد، ایمن و قابل اعتماد در فضای شهری وجود دارد.
-
ملاحظات استانداردسازی و مقررات
-
مفهوم عملیاتی شرح داده شده در اینجا با استفاده از NextGen و SESAR [ 11 ، 12 ، 13 ، 14 ، 15 ، 16 ، 17 ] مفهوم عملیات واحد سیستم شامل نظارت کل، که با استفاده از موقعیت یابی GPS/GNSS ترکیب می شود، توسعه یافته بود [ 33 ، 34 ، 35 ]، نشانگرها و حسگرهای فعال نیز با استفاده از رویکرد اینترنت اشیا در زیرساخت ادغام شدند [ 68 ]] طبقه بندی سلسله مراتبی در همکاری، استفاده از جداسازی ایمن، حس و اجتناب، با استفاده از داده های سرویس اطلاعات هوانوردی (AIS) و داده های سیستم های اطلاعات جغرافیایی (GIS) قابل اجرا در طراحی فضای هوایی UTM [ 36 ، 37 ]، پشتیبانی ساختار یافته GIS و تک مرکز عملیاتی که همه نشان دهنده واقعی ترین وضعیت هنر است.
-
شبکه مسیرها (لوله ها و راهروها) به عنوان راه حل بهبود یافته توصیه سنگاپور و [ 18 ، 19 ] تظاهرات [ 20 ] تعریف شده است.
-
عناصر خط سیر معرفی شده و معیارهای ایمنی توسط نویسندگان معرفی شده اند و پروازهای ایمن هواپیماهای بدون سرنشین را در شبکه مسیر بدون هیچ گونه عبوری در همان سطح ارتفاع تضمین می کنند [ 69 ، 70 ].
-
مفهوم بخشسازی پویا و فعال، «پشتیبانی خودکار برای بخشسازی پویا» را که توسط ابرپروژه مشترک SESAR [ 71 ] و مفهوم پیکربندی فضای هوایی [ 37 ] توسعه یافته است، ترکیب میکند.
-
سیستم به عنوان مجموعه ای از شش دسته از هواپیماهای بدون سرنشین (غیر شناسایی شده، شناسایی شده – بدون همکاری، و غیره) با استفاده از طبقه بندی استفاده شده توسط ارائه دهندگان خدمات نظارتی و خودپرداز و منتشر شده توسط نویسندگان در [ 25 ، 26 ] تعریف شده است.
-
همجوشی حسگر تنها مورد بحث قرار گرفته بود.
-
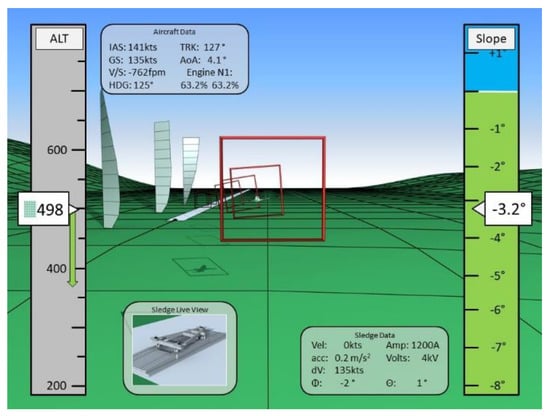
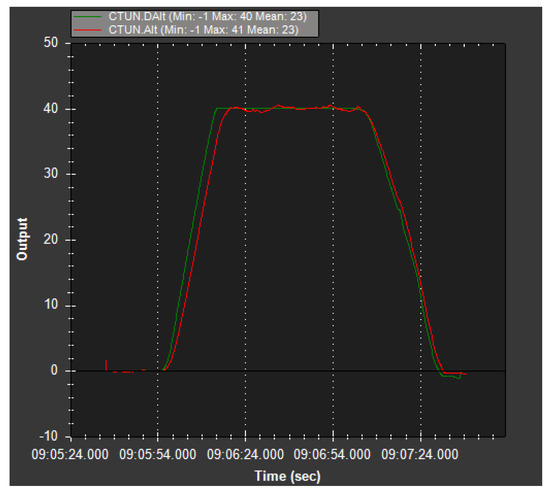
مسیر مورد نظر پس از مدیریت با استفاده از یک سیستم جدید مبتنی بر یک کنترل منحصر به فرد مبتنی بر مدل وارونگی و نتایج آزمایش که منجر به نتیجهگیری میشود، مورد آزمایش قرار گرفت. این روش را می توان در مناطق بین خانه های بزرگ، در ناحیه کمبود احتمالی موقعیت یابی GPS/GNSS استفاده کرد و دقت حتی در کلاس 5 باد نیز به حد قابل قبولی می رسد که دقت خوبی مانند روش های دیگر موجود مانند [ 4 ، 6 ] دارد. ]، اما در همه زمینه ها؛
-
مدل جدید پهپاد مبتنی بر تقریب مارکوف از فرآیند زیر پهپاد ایجاد شد، که منجر به راهحلهای یکسان یا کمی بهتر از مدل SD پرکاربرد میشود، نتایج نشان میدهد که مدل مارکوف با پارامترهای شناساییشده راهحلهای واقعیتری تولید میکند ( شکل ۱۹ را ببینید). )
-
یک راه حل مدیریت فرود توسعه داده شد که در تأیید شبیه سازی آزمایش شد، که کاربرد مدلی را نشان می دهد که دارای مزایایی در کنترل فرود پهپاد بال ثابت است.
6. نتیجه گیری
-
مدلهای پیرو پهپاد برای مدیریت هواپیماهای بدون سرنشین در جریان ترافیک هوایی شهری بر اساس این اصل که فاصله ایمن را با توجه به سرعت نسبی حفظ میکند، توسعه داده شدهاند. محیط شبیهسازی عددی نشان داد که فاصله ایمنی هواپیماهای بدون سرنشین حفظ میشود. یعنی هیچ حادثه ای در جریان ترافیک رخ نداده است.
-
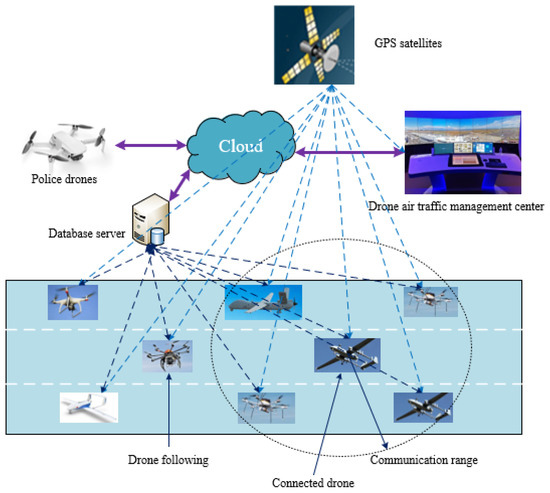
یک سیستم مدیریتی جدید برای ادغام حرکت هواپیماهای بدون سرنشین در جریان ترافیک شهری با استفاده از رویکرد مبتنی بر ابر. بهبود رویکرد ارتباطی به کاربران اجازه می دهد تا پهپادها را به عنوان اشیاء متصل در یک محیط بلادرنگ کنترل و نظارت کنند که مدیریت و کنترل برنامه های پهپاد را برای تحویل، نظارت، امنیت، آمبولانس و واکنش اضطراری فراهم می کند.
-
یک روش پیشرفته برای تعیین و محاسبه مراحل فرود پهپادها بر اساس معادله سیستم دیفرانسیل پهپاد و مدار مدار-خط مستقیم است. این روش را می توان برای فرود کارهای پیچیده تر در مناطق شهری و سکوهای متحرک یا نوسانی اعمال کرد.
منابع
- ژوان-مونگ، ن. تشخیص خطای اندازهگیری ارتفاع بارومتریک Hong، SK برای بهبود کنترل ارتفاع کوادکوپتر. در مجموعه مقالات 2019 نوزدهمین کنفرانس بین المللی کنترل، اتوماسیون و سیستم ها (ICCAS)، ججو، کره، 15 تا 18 اکتبر 2019؛ صص 1359–1364. [ Google Scholar ]
- ژوان-مونگ، ن. Hong, SK الگوریتم کنترل ارتفاع بهبود یافته برای وسایل نقلیه هوایی بدون سرنشین کوادکوپتر. Appl. علمی 2019 ، 9 ، 2122. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ژوان-مونگ، ن. هنگ، SK; نگوین، NP; فرود دقیق کوادکوپتر خودران Le, TL بر روی یک سکو: روش و آزمایش جدید. دسترسی IEEE 2020 ، 8 ، 167192–167202. [ Google Scholar ] [ CrossRef ]
- نگوین، AT; Xuan-Mung، N. کنترل ردیابی مسیر تطبیقی کوادکوپتر: یک رویکرد جدید از طریق تکنیک Backstepping. Appl. علمی 2019 ، 9 ، 3873. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کندول، اف. کنترل کننده پرواز سلسله مراتبی غیرخطی برای روتورکرافت های بدون سرنشین: طراحی، پایداری و آزمایش ها. جی. گاید. Dyn را کنترل کنید. 2009 ، 32 ، 1954-1958. [ Google Scholar ] [ CrossRef ]
- Zuo، طراحی کنترل ردیابی مسیر ZY با جبران فیلتر شده برای یک کوادروتور. برنامه تئوری کنترل IET 2010 ، 4 ، 2343-2355. [ Google Scholar ] [ CrossRef ]
- شاه، م.ز. سمر، ر. بهاتی، هوش مصنوعی کنترل مسیر جانبی پهپادها با استفاده از رویکرد حالت کشویی: از طراحی تا آزمایش پرواز. ترانس. Inst. Meas. کنترل 2015 ، 37 ، 457-474. [ Google Scholar ] [ CrossRef ]
- ژوان-مونگ، ن. Hong, SK کنترل ردیابی مسیر عقبگرد قوی یک کوادروتور با اشباع ورودی از طریق ناظر حالت توسعه یافته. Appl. علمی 2019 ، 9 ، 5184. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فاسلر، ام. فالانگا، دی. Scaramuzza، D. ترکیب رانش، اشباع، و کنترل سرعت بدن برای پرواز کوادروتور تهاجمی دقیق. ربات IEEE. خودکار Lett. 2017 ، 2 ، 476-482. [ Google Scholar ] [ CrossRef ]
- نقشه راه تحقیقات، توسعه و نمایش UAS NextGen، سیستم حمل و نقل هوایی نسل بعدی، دفتر برنامه ریزی و توسعه مشترک، نسخه 1.0. 2012، ص. 80. در دسترس آنلاین: https://fas.org/irp/program/collect/uas-nextgen.pdf (دسترسی در 20 فوریه 2021).
- آینده NAS، وزارت حمل و نقل ایالات متحده FAA-اداره هوانوردی فدرال، واشنگتن دی سی 2016؛ پ. 44. در دسترس آنلاین: https://www.faa.gov/nextgen/media/futureofthenas.pdf (در 20 فوریه 2021 قابل دسترسی است).
- EASA مفهوم عملیات برای هواپیماهای بدون سرنشین – رویکرد مبتنی بر ریسک برای تنظیم هواپیماهای بدون سرنشین، 01/05/2015. پ. 12. در دسترس آنلاین: https://www.easa.europa.eu/sites/default/files/dfu/204696_EASA_concept_drone_brochure_web.pdf (در 20 فوریه 2021 قابل دسترسی است).
- SEAR. طرح جامع ATM اروپا، خلاصه اجرایی ; SEASAR: بروکسل، بلژیک، 2020؛ پ. 176. در دسترس آنلاین: https://www.sesarju.eu/masterplan (در 20 فوریه 2021 قابل دسترسی است).
- شرکت مشترک SESAR. طرح جامع ATM اروپا: نقشه راه برای ادغام ایمن هواپیماهای بدون سرنشین در همه طبقات فضای هوایی، بروکسل. 2018، ص. 33. در دسترس آنلاین: https://www.sesarju.eu/sites/default/files/documents/reports/European%20ATM%20Master%20Plan%20Drone%20roadmap.pdf (دسترسی در 20 فوریه 2021).
- مفهوم عملیات U-Space، شرکت مشترک SESAR، EUROCONTROL، کنسرسیوم CORUS. 2019، ص. 92. در دسترس آنلاین: https://www.sesarju.eu/sites/default/files/documents/u-space/CORUS%20ConOps%20vol2.pdf (دسترسی در 20 فوریه 2021).
- مفهوم عملیاتی یکپارچه سازی ATM UAS. EUROCONTROL، EASA، بروکسل. 2018، ص. 61. در دسترس آنلاین: https://www.eurocontrol.int/sites/default/files/publication/files/uas-atm-integration-operational-concept-v1.0-release%2020181128.pdf (دسترسی در 20 فوریه 2021 ).
- NextGen—SESAR State of Harmonisation، نسخه سوم، SESAR، FAA. 2018; پ. 44. در دسترس آنلاین: https://www.faa.gov/nextgen/media/NextGen-SESAR_State_of_Harmonisation.pdf (در 20 فوریه 2021 قابل دسترسی است).
- پاتییل، ال. کم، KH; به زودی، BH; مائو، اس. فعال کردن عملیات ایمن سیستم های هواپیمای بدون سرنشین در یک محیط شهری: یک مطالعه مقدماتی. در سمپوزیوم بین المللی راه حل های پیشرفته برای کاربردهای نظارت بر هواپیما و وسایل نقلیه (ESAVS 2016) ؛ شناسه مجموعه: 189893797; موسسه ناوبری آلمان و مرکز هوافضای آلمان (DLR): برلین، آلمان، 2016; پ. 10. [ Google Scholar ]
- چارچوب پایین، KH برای مدیریت ترافیک شهری سیستم هواپیماهای بدون سرنشین (UTM-UAS)، پهپاد فعال سمپوزیوم صنعت سیستم های هواپیمای بدون سرنشین (UAS) ایکائو (UAS2017)، جمعه، 22 سپتامبر 2017 @ مرکز ICAO، مونترال، کانادا، 26 Avail. آنلاین: https://www.icao.int/Meetings/UAS2017/Documents/Kim%20Huat%20Lo_Singapore_UTM_%20Day%201.pdf (دسترسی در 20 فوریه 2021).
- جو، OJ مدیریت فضای شهری متصل برای هواپیماهای بدون سرنشین، Garuda Robotics. در دسترس آنلاین: https://garuda.io/connected-urban-airspace-management-for-unmanned-aircraft/ (دسترسی در 8 مارس 2021).
- Rohacs، J. PATS، سیستم حمل و نقل هوایی شخصی ؛ سی دی رام؛ کنگره ICAS: تورنتو، ON، کانادا، 2002; صفحات 7.4.1-7.4.11. در دسترس آنلاین: https://www.icas.org/ICAS_ARCHIVE/ICAS2002/PAPERS/774.PDF (در 8 مارس 2021 قابل دسترسی است).
- روهاکس، دی. Rohacs, J. شناور مغناطیسی کمک به برخاستن و فرود هواپیما (مطالعه امکان سنجی – مفهوم گابریل). Prog. هوانوردی علمی 2016 ، 85 ، 33-50. [ Google Scholar ] [ CrossRef ]
- روهاکس، دی. وسکوییل، م. Siepenkotter، N. ارزیابی ویژگی های فرود به دست آمده توسط شبیه سازی ها و آزمایش های پرواز در یک مدل مقیاس کوچک مربوط به عملیات برخاستن و فرود پیشرفته مغناطیسی. در مجموعه مقالات بیست و نهمین کنگره شورای بین المللی علوم هوانوردی، سن پترزبورگ، روسیه، 7 تا 12 سپتامبر 2014. [ Google Scholar ]
- یانکوویچ، آی. کاله، U. توسعه سیستم اندازه گیری بار خلبانان. Aircr. مهندس هوانوردی تکنولوژی 2019 ، 91 ، 281-288. [ Google Scholar ] [ CrossRef ]
- دین دانگ، ن. Rohacs, J. Smart City Total Transport-Managing System. در شبکه های صنعتی و سیستم های هوشمند. INISCOM 2018. یادداشت های سخنرانی موسسه علوم کامپیوتر، انفورماتیک اجتماعی و مهندسی مخابرات ; Duong, T., Vo, NS, Eds. Springer: Cham، آلمان، 2019; جلد 257، صص 74–85. [ Google Scholar ] [ CrossRef ]
- نگوین، دی. رواچ، جی. رواچ، دی. بوروس، الف. سیستم مدیریت کل حمل و نقل هوشمند برای شهرهای هوشمند آینده. Appl. علمی 2020 ، 10 ، 8933. [ Google Scholar ] [ CrossRef ]
- نگوین، سیستم مدیریت پهپاد مبتنی بر ابر DD در شهرهای هوشمند. در توسعه و آینده اینترنت هواپیماهای بدون سرنشین (IoD): بینش، روندها و راه پیش رو. مطالعات سیستم ها، تصمیم گیری و کنترل ; Krishnamurthi, R., Nayyar, A., Hassanien, AE, Eds.; Springer: Cham، آلمان، 2021; جلد 332. [ Google Scholar ] [ CrossRef ]
- دای نگوین، اچ پی؛ برنامه Nguyen، DD Drone در شهرهای هوشمند: مروری کلی بر آسیبپذیریهای امنیتی و اقدامات متقابل برای ارتباطات داده. در توسعه و آینده اینترنت هواپیماهای بدون سرنشین (IoD): بینش، روندها و راه پیش رو. مطالعات سیستم ها، تصمیم گیری و کنترل ; Krishnamurthi, R., Nayyar, A., Hassanien, A., Eds.; Springer: Cham، آلمان، 2021; جلد 332. [ Google Scholar ] [ CrossRef ]
- گابریل. سیستم یکپارچه زمینی و داخل هواپیما برای پشتیبانی از برخاست و فرود ایمن هواپیما—پروژه FP7 L1 اتحادیه اروپا، شماره موافقتنامه کمک هزینه: 284884 ; CD-ROM منتشر شده توسط Slot Consulting: بوداپست، مجارستان، 2014. [ Google Scholar ]
- راهنمای IEEE برای فناوری اطلاعات-تعریف سیستم-مفهوم عملیات (ConOps) سند. IEEE 1998 ، 1-24. [ CrossRef ]
- کلوتیر، آر. مستشاری، ع. مک کام، اس. دسموک، ا. کندی، دی. کارفیاتیس، P. بررسی محیط توسعه گرافیکی CONOPS برای مهندسی سیستم های چابک، گزارش فنی نهایی SERC-2009-TR-003 ; استیونز، موسسه فناوری، دانشگاه A&M تگزاس: ایستگاه کالج، TX، ایالات متحده آمریکا، 2009; پ. 94. [ Google Scholar ]
- طرح DLR. مفهوم ادغام فضای هوایی شهری – ادغام UAS در سیستم هوانوردی آینده. 2017. در دسترس آنلاین: https://www.dlr.de/content/de/downloads/2017/blueprint-concept-for-urban-airspace-integration_2933.pdf?__blob=publicationFile&v=11 (در 20 فوریه 2021 قابل دسترسی است).
- کان، م. اوکاموتو، اس. Lee, JH توسعه پهپادی با قابلیت پرواز مستقل با استفاده از GPS. در مجموعه مقالات کنفرانس چندگانه بین المللی مهندسان و دانشمندان کامپیوتر، هنگ کنگ، چین، 14 تا 16 مارس 2018؛ جلد 2. [ Google Scholar ]
- Al-Turjman, F. رویکردی جدید برای موقعیت یابی پهپادها در برنامه های کاربردی حیاتی. ترانس. ظهور. مخابرات تکنولوژی 2019 ، e3603. [ Google Scholar ] [ CrossRef ]
- فوکودا، ک. کاوایی، س. نوبوهارا، اچ. برآورد نگرش توسط فیلتر کالمن بر اساس ادغام IMU و GPS های متعدد و کاربرد آن در پهپادهای متصل. در مجموعه مقالات پنجاه و نهمین کنفرانس سالانه 2020 انجمن مهندسین ابزار و کنترل ژاپن (SICE)، چیانگ مای، تایلند، 23 تا 26 سپتامبر 2020؛ ص 1286-1292. [ Google Scholar ]
- گازیس، دی سی; هرمان، آر. روتری، مدلهای غیرخطی RW دنبالهروی جریان ترافیک. اپراتور Res. 1961 ، 9 ، 545-567. [ Google Scholar ] [ CrossRef ]
- پانگ، بی. دای، دبلیو. را، ت. Low, KH مفهومی از پیکربندی فضای هوایی و قوانین عملیاتی برای UAS در فضای فعلی. در مجموعه مقالات سی و نهمین کنفرانس سیستم های اویونیک دیجیتال AIAA/IEEE 2020 (DASC)، سن آنتونیو، تگزاس، ایالات متحده آمریکا، 11 تا 15 اکتبر 2020؛ صفحات 1-9. [ Google Scholar ]
- ICAO پیوست 19. مدیریت ایمنی. در استانداردهای بین المللی و رویه های توصیه شده، ویرایش 12; 2016; پ. 46. در دسترس آنلاین: https://www.easa.europa.eu/sites/default/files/dfu/ICAO-annex-19.pdf (در 2 مه 2021 قابل دسترسی است).
- ICAO Cir 328. سیستم های هواپیمای بدون سرنشین (UAS) ; سیستم های هواپیمای بدون سرنشین (UAS): مونترال، QC، کانادا، 2011; پ. 54. شابک 978-92-9231-751-5. [ Google Scholar ]
- ICAO Document 9859. Safety Management Manual (SMM) , 4th ed.; 2017; پ. 149. در دسترس آنلاین: https://www.aex.ru/imgupl/files/ICAO%20Doc%209859%20-%20SMM_Edition%204%20-%20Peer%20Review.pdf (در 2 مه 2021 قابل دسترسی است).
- لوپیچینی، آر. بنابراین، A. بررسی فنی اخلاقی استفاده از هواپیماهای بدون سرنشین تجاری در زمینه حاکمیت، اخلاق و حریم خصوصی. تکنولوژی Soc. 2016 ، 46 ، 109-119. [ Google Scholar ] [ CrossRef ]
- پلیوتسیاس، ا. کارانیکا، ن. Chatzimihailidou، تجزیه و تحلیل خطر MM و الزامات ایمنی برای عملیات پهپادهای کوچک: هواپیماهای بدون سرنشین محبوب تا چه حد ایمنی را تعبیه می کنند؟ ریسک مقعدی 2017 ، 38 ، 562-584. [ Google Scholar ] [ CrossRef ]
- Huttunen، M. عملیات هواپیماهای بدون سرنشین در رده خاص: رویکردی منحصر به فرد برای ایمنی هوانوردی. هوانوردی. Space J. 2019 ، 18 ، 2-21. [ Google Scholar ]
- Clothier, RA; گریر، دی. گریر، دی جی؛ مهتا، درک خطر AM و پذیرش عمومی هواپیماهای بدون سرنشین. ریسک مقعدی 2015 ، 35 ، 1167-1183. [ Google Scholar ] [ CrossRef ]
- آلتاوی، ر. یوسف، AM جنبه های امنیتی، حریم خصوصی و ایمنی هواپیماهای بدون سرنشین غیرنظامی: یک نظرسنجی. ACM Trans. فیزیک سایبر سیستم 2016 ، 1 ، 1-25. [ Google Scholar ] [ CrossRef ]
- یعقوب، J.-P. نورا، ح. سلمان، ا. شهاب، ع. تجزیه و تحلیل امنیتی سیستم های هواپیماهای بدون سرنشین: حملات، محدودیت ها و توصیه ها. اینترنت Things 2020 ، 11 ، 39. [ Google Scholar ] [ CrossRef ]
- لین، سی. او، دی. کومار، ن. چو، KKR؛ وینل، ا. Huang, X. امنیت و حریم خصوصی برای اینترنت هواپیماهای بدون سرنشین: چالش ها و راه حل ها. IEEE Commun. Mag. 2018 ، 56 ، 64-69. [ Google Scholar ] [ CrossRef ]
- سولو، آ. فروشنده، ر. روهاکس، دی. Renner, P. شناسایی و محلی سازی پهپاد مبتنی بر چندلایه. در هجدهمین سمپوزیوم بین المللی رادار (IRS) ؛ هرمان، آر.، اد. IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2017؛ پ. 10. [ Google Scholar ] [ CrossRef ]
- Zsolt، S. چالش های ناشی از وسیله نقلیه هوایی بدون سرنشین در مدیریت ترافیک هوایی. عادت زنانه. پلی تک. ترانسپ مهندس 2019 ، 47 ، 96-105. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هگدوس، تی. نمث، بی. گاسپار، پی. چالش ها و امکانات استراتژی های سبقت برای وسایل نقلیه خودران. عادت زنانه. پلی تک. ترانسپ مهندس 2020 ، 48 ، 320-326. [ Google Scholar ] [ CrossRef ]
- کیولویچ، ای اچ. دیون، جی. رز، تی. آرورا، پی. فانوس، بی. سالوو، آر. پلیسیر، وی. لوسادا، ر. Gentile، R. Sensor Fusion Tools در پشتیبانی از سیستم های خودمختار. Aiaa Scitech 2019 . [ Google Scholar ] [ CrossRef ]
- سیورت، اس. عندلیبی، م. برودر، اس. جنتیلینی، آی. معماری شبکه های بدون سرنشین Buchholz، J. برای آزمایش های شبکه های حسگر چندوجهی مدیریت ترافیک UAS. در مجموعه مقالات کنفرانس هوافضای IEEE 2018، Big Sky، MT، ایالات متحده آمریکا، 3 تا 10 مارس 2018؛ صص 1-18. [ Google Scholar ] [ CrossRef ]
- جون، م. D’Andrea، R. برنامه ریزی مسیر برای وسایل نقلیه هوایی بدون سرنشین در محیط های نامشخص و متخاصم، فصل 6. در کنترل تعاونی: مدل ها، برنامه ها و الگوریتم ها . بوتنکو، اس.، مورفی، آر.، پاردالوس، پی.، ویرایش. Springer: Cham، آلمان، 2003; صص 95-110. [ Google Scholar ]
- ملینگر، دی. مایکل، ن. کومار، V. تولید مسیر و کنترل مانورهای تهاجمی دقیق با رباتیک آزمایشی کوادروتور، دوازدهمین سمپوزیوم بینالمللی رباتیک تجربی . خطیب، او.، کومار، وی.، سوخاتمه، جی.، ویرایش. Springer-Verlag: برلین/هایدلبرگ، آلمان، 2014; صص 361-374. [ Google Scholar ]
- Szabolcsi, R. برنامه ریزی مسیر پرواز برای پروازهای با ارتفاع پایین پهپاد کوچک. آکادمی نیروی زمینی Rev. 2020 , 25 , 159–167. [ Google Scholar ] [ CrossRef ]
- روبی، بی. پرز، آر. Morcego, B. A Survey of Path Following Control Strategies for UAVs Focused on Quadrotor. جی. اینتل. ربات. سیستم 2020 ، 98 ، 241-265. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیانگ، ز. لی، کیو. Ren, Z. راهنما محدود شده برای وسایل نقلیه ورودی. هوانوردی علمی تکنولوژی 2016 ، 52 ، 52-61. [ Google Scholar ] [ CrossRef ]
- پوتن، ا. Ratnoo, A. میدان برداری لیاپانوف با محدودیت انحنا برای ردیابی هدف در حالت ایستاده. جی. گاید. Dyn را کنترل کنید. 2017 ، 40 ، 2725-2735. [ Google Scholar ] [ CrossRef ]
- راتنو، ع. سوجیت، پ. Kothari، M. مسیر بهینه تطبیقی برای پروازهای باد شدید. IFAC 2011 ، 44 ، 12985-12990. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دیست، ج. چگونه، JP; پارک، اس. لیاپانوف پایداری قانون هدایت غیرخطی برای پهپادها. در مجموعه مقالات کنفرانس و نمایشگاه مکانیک پرواز اتمسفر AIAA، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 15 تا 18 اوت 2005. صفحات 2005-6230. [ Google Scholar ]
- ژانگ، جی. لی، کیو. چنگ، ن. لیانگ، ب. کنترل مسیر برای وسایل نقلیه هوایی بدون سرنشین بال ثابت بر اساس یک هدف مجازی. Proc. Inst. مکانیک. مهندس قسمت G J. Aerosp. مهندس 2012 ، 228 ، 66-76. [ Google Scholar ] [ CrossRef ]
- زوائوی، اس. محمد، ای. Kouider, B. ردیابی آسان پهپاد با استفاده از کنترلر PID. عادت زنانه. پلی تک. ترانسپ مهندس 2019 ، 47 ، 171-177. [ Google Scholar ] [ CrossRef ]
- چن، کیو. وانگ، ایکس. یانگ، جی. وانگ، زی. هدایت پیروی از مسیر بر اساس یک هدف مجازی و یک محدودیت زاویه. هوانوردی علمی تکنولوژی 2019 ، 87 ، 448-458. [ Google Scholar ] [ CrossRef ]
- چن، اچ. کنگ، ی. وانگ، ایکس. خو، X. Shen, L. کنترل هماهنگ شده مسیر-پیروی وسایل نقلیه هوایی بدون سرنشین با بال ثابت. IEEE Trans. سیستم ManCybern. سیستم 2021 . [ Google Scholar ] [ CrossRef ]
- Dung, ND در حال توسعه مدل هایی برای مدیریت پهپادها در سیستم حمل و نقل در شهرهای هوشمند. علمی جی ریگا تک. دانشگاه برق ارتباط کنترل مهندس 2019 ، 15 ، 71–78. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سرگین، ND; Rohacs, J. مدلهای پیروی از پهپاد در شهرهای هوشمند. در مجموعه مقالات پنجاه و نهمین کنفرانس علمی بین المللی IEEE 2018 در زمینه برق و مهندسی برق دانشگاه فنی ریگا (RTUCON)، ریگا، لتونی، 12 تا 13 نوامبر 2018؛ صص 1-6. [ Google Scholar ] [ CrossRef ]
- سرگین، ND; Rohacs, J. Robust برنامه ریزی فرآیند فرود هواپیماهای بدون سرنشین. بین المللی J. Sustain. هوانوردی. 2019 ، 5 ، 1-18. [ Google Scholar ] [ CrossRef ]
- مطلق، NH; طالب، ت. Arouk, O. خدمات اینترنت اشیا مبتنی بر وسایل نقلیه هوایی بدون سرنشین در ارتفاع پایین: بررسی جامع و چشم اندازهای آینده. IEEE Internet Things J. 2016 ، 3 ، 899–922. [ Google Scholar ] [ CrossRef ]
- ایکائو مدیریت ترافیک سیستم های هواپیمای بدون سرنشین (UTM) – چارچوبی مشترک با اصول اصلی برای هماهنگی جهانی. در دسترس آنلاین: https://www.icao.int/safety/UA/Documents/UTM-Framework%20Edition%202.pdf (در 28 آوریل 2021 قابل دسترسی است).
- خو، سی. لیائو، ایکس. تان، جی. بله، اچ. لو، اچ. پیشرفت تحقیقات اخیر سیاستها و فناوریهای تنظیم وسایل نقلیه هوایی بدون سرنشین در ارتفاع کم شهری. دسترسی IEEE 2020 ، 8 ، 74175–74194. [ Google Scholar ] [ CrossRef ]
- SESAR. پشتیبانی خودکار برای بخش بندی پویا در دسترس آنلاین: https://www.sesarju.eu/sesar-solutions/automated-support-dynamic-sectorisation (در 28 آوریل 2021 قابل دسترسی است).



بدون دیدگاه