

خلاصه
کلید واژه ها:
الگوهای خطی ساختمان ; شاخص تداوم فضایی (SCI) ; شاخص جهت (DI) ; الگو شناسی
1. معرفی
2. روش شناسی
ماتریس رابطه مجاورت نشان دهنده این است که آیا ساختمان ها از نظر توپولوژیکی مجاور هستند یا خیر و بر اساس اینکه آیا ساختمان ها مثلث های مشترکی در CDT دارند یا خیر به دست می آید:
جایی که من=1:nو j=1:nساختمان های درون یک بلوک را نشان می دهد و آرمن،jیک متغیر بولی است: آرمن،j=1نشان میدهد که منو jمجاور هستند و آرمن،j=0نشان میدهد که منو jمجاور نیستند
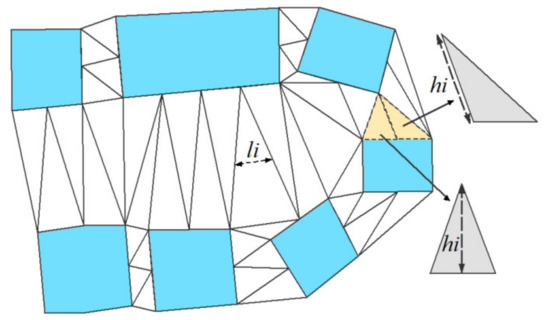
یک خط اسکلت از نقاط میانی اضلاع مثلثی تشکیل می شود که دو ساختمان مجاور را به هم متصل می کند ( شکل 2 )[ 30 ]. طول یک خط اسکلت به صورت زیر بدست می آید:
جایی که لمن،j،کنشان دهنده فاصله بین دو نقطه وسط اضلاع مثلث است ککه دو ساختمان مجاور را به هم پیوند می دهد، Lمن،j=∑لمن،j،کنشان دهنده طول مجموع خط اسکلت بین دو ساختمان مجاور است و Lمن،j=0اگر دو ساختمان منو jهمانطور که در رابطه (1) به دست می آید، مجاور نیستند.
میانگین فاصله ساختمان های مجاور بر اساس خط اسکلت به صورت زیر بدست می آید [ 22 ]:
جایی که ساعتمن،j،کارتفاع مثلث را نشان می دهد کبا پایه ای که در هر چند ضلعی ساختمان مجاور قرار می گیرد، لمن،j،کنشان دهنده فاصله بین دو نقطه وسط اضلاع مثلث است ککه دو ساختمان مجاور را، همانطور که از رابطه (2) به دست می آید، به هم مرتبط می کند دمن،j=∞اگر دو ساختمان منو jهمانطور که در رابطه (1) به دست می آید، مجاور نیستند. اگر مثلث تیز یا راست باشد، ساعتمن،j،کارتفاع از سمت مشترک با ساختمان است. اگر مثلث منفرد باشد، ساعتمن،j،ککوتاه ترین ضلع مثلثی است که دو ساختمان را به هم پیوند می دهد ( شکل 2 ).
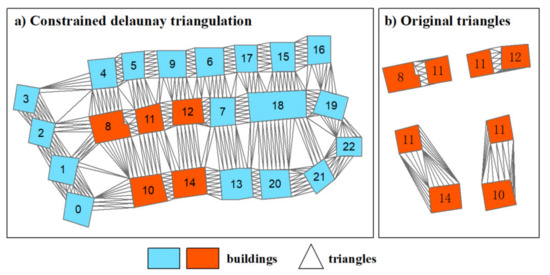
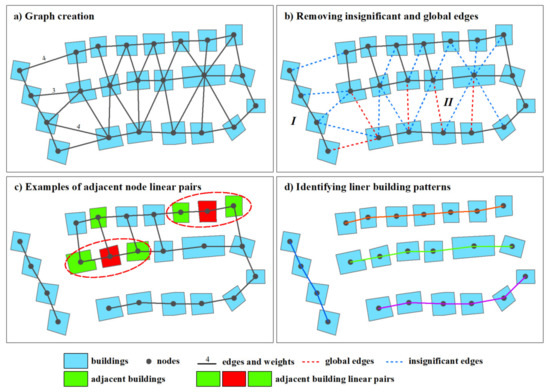
اکنون، در مورد تداوم الگوهای ساختمانی خطی بحث می کنیم. از نظر بصری، مثلثهای درون نوع اول CDT شبیه پلها هستند که به ساختمانهای مجاور میپیوندند تا الگوهای خطی تشکیل دهند ( شکل 1 a). علاوه بر این، مثلث های بین هر جفت از ساختمان های مجاور یک الگوی خطی از نظر مساحت، جهت و تعداد بسیار مشابه هستند. هنگام مقایسه دو نوع مثلث فوق، متوجه می شویم که مساحت مثلث های اصلی بین دو ساختمان مجاور بزرگتر از مثلث نوع اول است، به ویژه برای ساختمان هایی با آرایش نامنظم یا تفاوت در شکل و اندازه (به عنوان مثال، ساختمان های 10). -11، 11-14 در شکل 1). به طور خاص، در یک الگوی خطی، نسبت مساحت این مثلث ها به مثلث های اصلی بیشتر از بیشتر جفت ساختمان های مجاور از الگوهای غیرخطی است. بر این اساس، ما معتقدیم که رابطه فضایی دو ساختمان مجاور تحت تأثیر ساختمان های اطراف آنها است. در این مقاله، ما از این نسبت به عنوان SCI ساختمانهای مجاور استفاده میکنیم تا درک خود را از تداوم الگوهای ساختمانی خطی منعکس کنیم.
جایی که SCIمن،jتداوم فضایی بین ساختمان ها است منو j، آآرنشان دهنده مساحت مثلث هایی است که به دو ساختمان در CDT تعلق دارند و آOنشان دهنده مساحت مثلث های اصلی است که دو ساختمان را به هم متصل می کند.
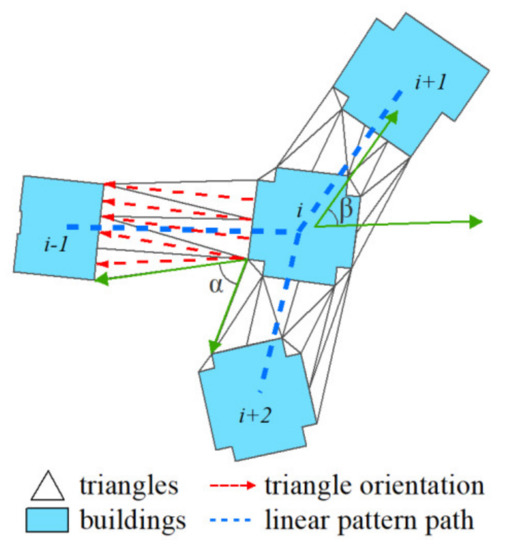
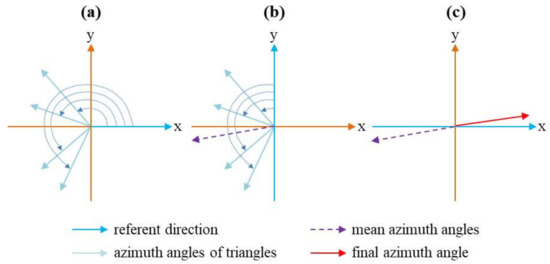
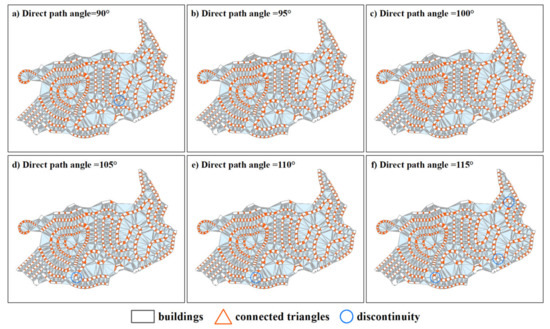
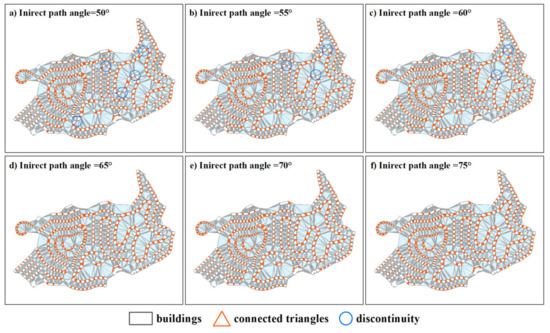
نوع دیگری از زاویه مسیر، یعنی زاویه مسیر غیرمستقیم، توسط زوایای آزیموت ساختمان ها (به عنوان مثال، ساختمان i-1 و ساختمان i+1 در شکل 3 ) در دو طرف ساختمان میانی (به عنوان مثال، ساختمان) تشکیل می شود. i در شکل 3 ). مثلث های متصل به دو ساختمان در دو طرف هیچ تلاقی ندارند. بردارهای میانه این مثلث ها زوایای آزیموت دو ساختمان مجاور را تعیین می کنند (به عنوان مثال، فلش قرمز چین در شکل 3 ). سه مرحله برای محاسبه این نوع زاویه آزیموت وجود دارد ( شکل 4). ابتدا نقطه وسط خط مبنا (یعنی کوتاه ترین ضلع) مثلث و نقطه مربوط به قاعده را تعیین کنید. از دو نقطه برای بدست آوردن زاویه آزیموت مثلث استفاده کنید که در خلاف جهت عقربه های ساعت از جهت مثبت محور X اندازه گیری می شود ( شکل 4 a). واضح است که تمام زوایای آزیموت مثلث ها در محدوده 0 تا 360 درجه هستند. دوم، از آنجایی که تمام جهات بردار خط مرکزی مثلث ها به یک ضلع از محور اشاره می کنند، این زوایای آزیموت نیز می توانند در خلاف جهت عقربه های ساعت از یک جهت از محور اندازه گیری شوند ( شکل 4).ب). بنابراین، همه آنها به محدوده 0 تا 180 درجه تبدیل می شوند و از رابطه (5) برای محاسبه زاویه میانگین با این زوایای آزیموت استفاده می شود. در نهایت، زاویه میانگین به زاویه نهایی تبدیل می شود که در خلاف جهت عقربه های ساعت از جهت مثبت محور X اندازه گیری می شود ( شکل 4 ج). در این مقاله از زاویه نهایی به عنوان DI دو ساختمان مجاور استفاده می کنیم. بنابراین، یک زاویه مسیر غیر مستقیم برابر با مقدار مطلق اختلاف زاویه بین دو زاویه نهایی است (به عنوان مثال، زاویه β در شکل 3 ). هرچه زاویه به 0 نزدیکتر باشد، الگوهای خطی بهتر هستند.
جایی که αمن،j،کزاویه آزیموت یک مثلث را نشان می دهد کبا پایه ای که در هر یک از ساختمان های مجاور می افتد، لمن،j،کنشان دهنده فاصله بین دو نقطه وسط دو ضلع مثلث است کهمانطور که از رابطه (2) به دست می آید، دو ساختمان مجاور را به هم مرتبط می کند.
مرحله 5. مرحله پنجم ما لبه های ناچیز و سراسری نمودار را حذف می کند، که ممکن است منجر به چندین نمودار قطع شود ( شکل 5 ب). در سطح محلی، لبه های بی اهمیت زیادی روی نمودار وجود دارد (به عنوان مثال، خط چین آبی در شکل 5 ب)، که زمان پیمایش نمودار را افزایش می دهد و ممکن است الگوهای خطا ایجاد کند. این نوع لبه ابتدا حذف می شود. با این حال، در سطح جهانی، فقط اشیاء نزدیک به صورت بصری توسط افراد طبق اصل مجاورت گشتالت، مانند مناطق I و II در شکل 5 ب، به عنوان خوشه درک می شوند. یعنی اگر لبهها با فواصل زیاد طولانی وزن شوند (مثلاً خط چین قرمز در شکل 5)ب) از نمودار حذف می شوند. بنابراین، از دو مقدار برش، از جمله SCI (معادله (4)) و d (معادله (3))، برای شناسایی لبههایی با مقادیر شاخص طولانی استفاده میشود. مقدار برش SCI به صورت تجربی تنظیم شده است (به عنوان مثال 0.5) و ابتدا برای حذف لبه ها استفاده می شود. متعاقباً، لبههای وزن شده با فواصل بسیار طولانی حذف میشوند. برای هر نقطه پمن، مقدار برش d که با نشان داده می شود برش_ارزشپمنرا می توان به صورت معادله (6) نشان داد.
جایی که منظور داشتنپمنمیانگین طول لبه های تشکیل شده توسط نقاط اتصال است پمن. nیک عامل کنترل کننده است که برای تنظیم حساسیت استفاده می شود برش_ارزشپمن.
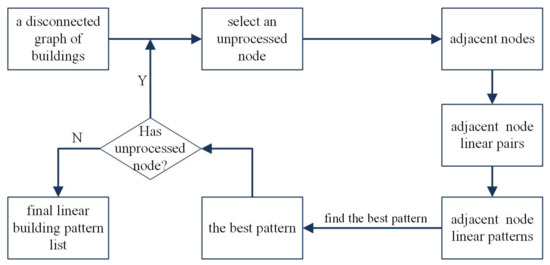
مرحله 6. عمل ششم با هدف تقسیم نمودار قطع شده به زیرگراف های متصل، همانطور که در شکل 5 c,d نشان داده شده است. هر زیرگراف متصل یک الگوی ساختمانی خطی را نشان می دهد ( شکل 5 د). این فرآیند توسط زاویه مسیر تشکیل شده توسط ساختمان های دو طرف کنترل می شود و از چندین مرحله تشکیل شده است ( شکل 6 ). ابتدا یک گره پردازش نشده را انتخاب می کنیم و تمام گره های مجاور آن را تعیین می کنیم. سپس جفتهای ساختمان خطی آن از ساختمانهای مجاور بر اساس زوایای مسیرشان شناسایی میشوند. یعنی اگر زاویه مسیر دو ساختمان مجاور در دو طرف کمتر از آستانه داده شده باشد، آنها یک جفت خطی ساختمان مجاور در نظر گرفته می شوند ( شکل 5).ج). ثالثاً ساختمان های مجاور ساختمان های مجاور مشخص می شوند. این روند تا زمانی تکرار می شود که هیچ ساختمان مجاوری با شرایط تعیین شده وجود نداشته باشد. بنابراین، ما می توانیم چندین الگوی ساختمان خطی از یک گره را استخراج کنیم. در نهایت الگوی با بهترین ارزش ارزیابی I به عنوان بهترین الگو انتخاب می شود. بهترین ارزش ارزیابی I برای هر الگوی خطی به صورت زیر محاسبه می شود.
جایی که لمننشان دهنده الگوی خطی i- امین است، N تعداد یال های الگوی خطی i- امین است، و منظور داشتنلمنمیانگین فاصله الگوی خطی است لمن.
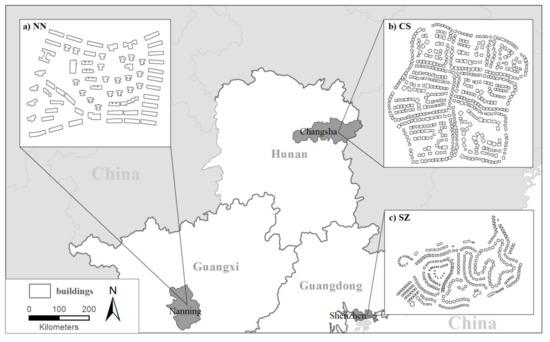
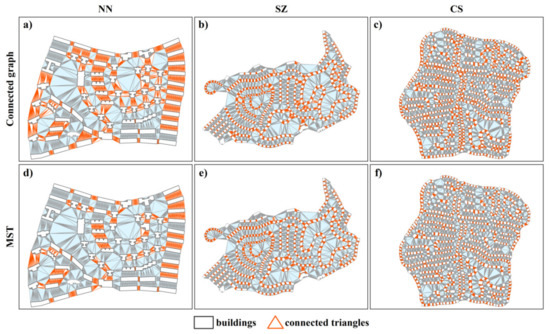
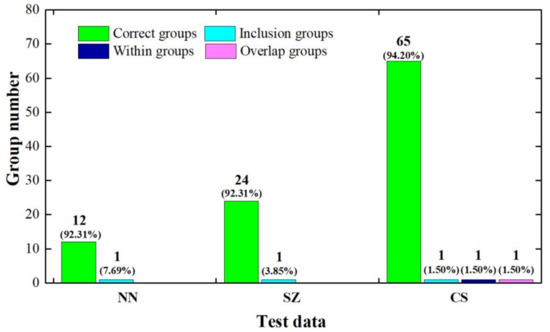
3. داده های تست
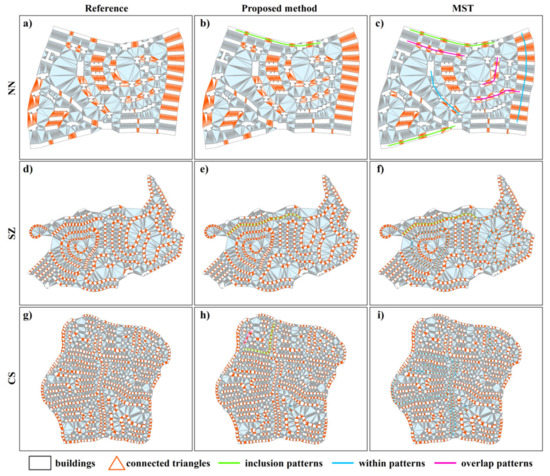
4. نتایج و بحث
5. نتیجه گیری ها
منابع
- دو، اس. لو، ال. کائو، ک. Shu, M. استخراج الگوهای ساختمان با پارتیشن نمودار چندسطحی و گروه بندی ساختمان. ISPRS J. Photogramm. Remote Sens. 2016 ، 122 ، 81-96. [ Google Scholar ] [ CrossRef ]
- دو، اس. شو، م. Feng, C. بازنمایی و کشف الگوهای ساختمانی: یک رویکرد رابطهای سه سطحی. بین المللی جی. جئوگر. آگاه کردن. علمی 2016 ، 30 ، 1161-1186. [ Google Scholar ] [ CrossRef ]
- ژانگ، ایکس. آی، تی. استوتر، جی. کراک، ام. Molenaar, M. تشخیص الگوی ساختمان در داده های توپوگرافی: نمونه هایی در ترازهای خطی و منحنی. GeoInformatica 2013 ، 17 ، 1-33. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کریستف، اس. رواس، الف. تشخیص ترازهای ساختمان برای اهداف تعمیم. پیشرفت در مدیریت داده های مکانی ; Springer: برلین، آلمان، 2002; صص 419-432. [ Google Scholar ]
- ژانگ، ایکس. استوتر، جی. آی، تی. کراک، ام. Molenaar, M. ارزیابی خودکار ترازهای ساختمان در نقشه های تعمیم یافته. بین المللی جی. جئوگر. آگاه کردن. علمی 2013 ، 27 ، 1550-1571. [ Google Scholar ] [ CrossRef ]
- او، X. ژانگ، ایکس. یانگ، جی. ادغام پیشرونده خوشههای ساختمانی برای تعمیم نقشه بر اساس زیرگروههای مقیاسبندی. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 116. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وابینسکی، جی. Mościcka، A. تولید نقشه خودکار (لمسی) – مروری بر ادبیات سیستماتیک. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 293. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دو، اس. ژانگ، اف. Zhang، X. طبقه بندی معنایی ساختمان های شهری با ترکیب تصویر VHR و داده های GIS: یک رویکرد جنگل تصادفی بهبود یافته. ISPRS J. Photogramm. Remote Sens. 2015 ، 105 ، 107-119. [ Google Scholar ] [ CrossRef ]
- نیو، ن. لیو، ایکس. جین، اچ. بله، X. لیو، ی. لی، ایکس. چن، ی. لی، اس. یکپارچه سازی داده های بزرگ چند منبعی برای استنتاج توابع ساختمان. بین المللی جی. جئوگر. آگاه کردن. علمی 2017 ، 31 ، 1871-1890. [ Google Scholar ] [ CrossRef ]
- یان، ایکس. آی، تی. یانگ، م. یین، اچ. یک گراف شبکه عصبی کانولوشن برای طبقه بندی الگوهای ساختمان با استفاده از داده های برداری فضایی. ISPRS J. Photogramm. Remote Sens. 2019 ، 150 ، 259–273. [ Google Scholar ] [ CrossRef ]
- فروین، وی. فلدمن، جی. گروه بندی سلسله مراتبی سینگ، ام. بیزی: گروه بندی ادراکی به عنوان تخمین مخلوط. روانی Rev. 2015 , 122 , 575-597. [ Google Scholar ] [ CrossRef ]
- او، X. ژانگ، ایکس. Xin، Q. شناخت الگوهای گروه ساختمانی در نقشه های توپوگرافی بر اساس تقسیم بندی نمودار و جنگل تصادفی. ISPRS J. Photogramm. Remote Sens. 2018 ، 136 ، 26–40. [ Google Scholar ] [ CrossRef ]
- دنگ، م. لیو، کیو. چنگ، تی. Shi, Y. یک الگوریتم خوشهبندی فضایی تطبیقی مبتنی بر مثلثسازی دلونای. محاسبه کنید. محیط زیست سیستم شهری 2011 ، 35 ، 320-332. [ Google Scholar ] [ CrossRef ]
- اندرس، ک. سستر، ام. فریچ، دی. تجزیه و تحلیل ساختارهای نشست با استفاده از خوشه بندی مبتنی بر نمودار. SMATI 1999 ، 99 ، 41-49. [ Google Scholar ]
- Anders, KH یک رویکرد گراف-گراف سلسله مراتبی برای یافتن گروه هایی از اشیاء. در مجموعه مقالات پنجمین کارگاه آموزشی در مورد پیشرفت در تعمیم خودکار نقشه، پاریس، فرانسه، 28-30 آوریل 2003. منبع: پرینستون، نیوجرسی، ایالات متحده آمریکا، 2003. [ Google Scholar ]
- وانگ، ی. ژانگ، ال. Mathiopoulos، PT; دنگ، اچ. قوانین گشتالت و چارچوب ساده سازی مبتنی بر برش نمودار برای مدل های ساختمان شهری. بین المللی J. Appl. رصد زمین. Geoinf. 2015 ، 35 ، 247-258. [ Google Scholar ] [ CrossRef ]
- وانگ، دبلیو. دو، اس. گوا، ز. Luo, L. تجزیه و تحلیل خوشه بندی چند ضلعی با استفاده از پارتیشن نمودار چند سطحی. ترانس. GIS. 2015 ، 19 ، 716-736. [ Google Scholar ] [ CrossRef ]
- لی، ز. یان، اچ. آی، تی. چن، جی. تعمیم خودکار ساختمان بر اساس مورفولوژی شهری و نظریه گشتالت. بین المللی جی. جئوگر. آگاه کردن. علمی 2004 ، 18 ، 513-534. [ Google Scholar ] [ CrossRef ]
- Zahn، CT گراف – روش های نظری برای تشخیص و توصیف خوشه های گشتالت. IEEE Trans. محاسبه کنید. 1971 ، 100 ، 68-86. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Wertheimer, M. قوانین سازمان در اشکال ادراکی. کتاب منبع روانشناسی گشتالت ; Routledge & Kegan Paul: لندن، انگلستان، 1923; صص 71-88. [ Google Scholar ]
- Regnauld، N. نوع سازی ساختمان متنی در تعمیم خودکار نقشه. الگوریتمیکا 2001 ، 30 ، 312-333. [ Google Scholar ] [ CrossRef ]
- آی، تی. کاوش الگوی خوشه ای چندضلعی Guo، R. بر اساس اصول گشتالت. Acta Geod. کارتوگر. گناه 2007 ، 36 ، 302-308. [ Google Scholar ]
- یانگ، ال. ژانگ، ال. ما، جی. زی، جی. لیو، ال. تجسم تعاملی مدلهای ساختمان شهری با وضوح چندگانه با در نظر گرفتن شناخت فضایی. بین المللی جی. جئوگر. آگاه کردن. علمی 2011 ، 25 ، 5-24. [ Google Scholar ] [ CrossRef ]
- چن، ز. ما، ایکس. وو، ال. Xie, Z. یک رویکرد شباهت فازی شهودی برای تجزیه و تحلیل خوشهبندی چندضلعیها. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 98. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فرانک، AU استدلال فضایی کیفی: جهت های اصلی به عنوان مثال. بین المللی جی. جئوگر. آگاه کردن. علمی 1996 ، 10 ، 269-290. [ Google Scholar ] [ CrossRef ]
- فرانک، AU استدلال فضایی کیفی در مورد فواصل و جهت ها در فضای جغرافیایی. J. ویژوال لنگ. محاسبه کنید. 1992 ، 3 ، 343-371. [ Google Scholar ] [ CrossRef ]
- یان، اچ. چو، ی. لی، ز. Guo, R. یک مدل توصیف کمی برای روابط جهت بر اساس گروه های جهت. GeoInformatica 2006 ، 10 ، 177-196. [ Google Scholar ] [ CrossRef ]
- فیلد، دی جی; هیز، ا. هس، ادغام RF Contour توسط سیستم بینایی انسان: شواهدی برای یک “میدان انجمن” محلی. Vision Res. 1993 ، 33 ، 173. [ Google Scholar ] [ CrossRef ]
- آی، تی. ژانگ، X. تجمع خوشه های ساختمان شهری بر اساس تقسیم بندی اسکلت فضای شکاف. جامعه اطلاعاتی اروپا Springer: برلین، آلمان، 2007; صص 153-170. [ Google Scholar ]
- آی، تی. Van Oosterom، P. GAP-tree extensions بر اساس اسکلت. در پیشرفت در مدیریت داده های مکانی ; Springer: برلین، آلمان، 2002; ص 501-513. [ Google Scholar ]
- چتینکایا، اس. بسارنر، م. Burghardt، D. گروهبندی ساختمانها در بلوکهای شهری مبتنی بر مجاورت: مقایسه چهار الگوریتم. Geocarto Int. 2015 ، 30 ، 618-632. [ Google Scholar ] [ CrossRef ]


بدون دیدگاه