

خلاصه
کلید واژه ها:
طبقه بندی کاربری چند زمانی و پوشش زمین ; تجزیه و تحلیل هارمونیک ; الگوریتم حداقل فاصله طیفی ; سری زمانی لندست ; شهر نانجینگ ؛ چین
1. معرفی
2. مواد و روشها
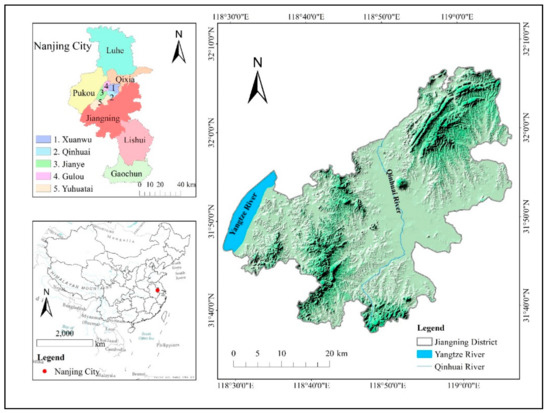
2.1. منطقه مطالعه
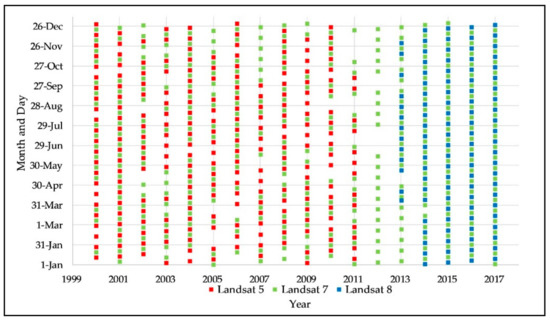
2.2. مجموعه داده ها
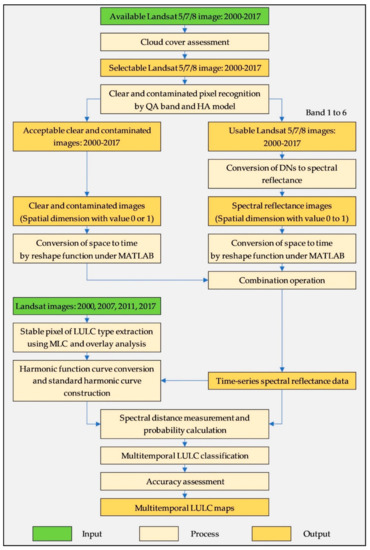
2.3. روش تحقیق
2.3.1. انتخاب داده لندست و بازسازی بازتاب طیفی سری زمانی
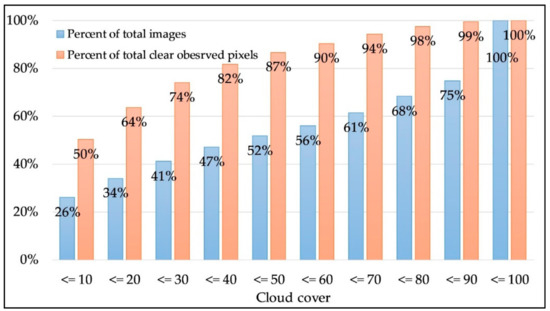
ارزیابی پوشش ابری
در عمل، ابرداده درصد پوشش ابری از پورتال وب USGS برای تصاویر موجود Landsat 5/7/8 بین سالهای 2000 و 2017 مشاهده، ثبت و محاسبه شد. درصد کل تصاویر و کل پیکسلهای به وضوح مشاهده شده، طبق 10 کلاس های فاصله (≤10، ≤20، ≤30، ≤40، ≤50، ≤60، ≤70، ≤80، ≤90 و ≤100) پوشش ابر (%)، با استفاده از معادلات (1) و (1) محاسبه شد. 2):
جایی که i پوشش ابری (%) است که کمتر یا مساوی با کلاس بازه (10، 20، …، 100) است. پمنمترآgه،مندرصد کل تصاویر است، نمنمترآgه،منتعداد تصاویر است و نمنمترآgهتعداد کل تصاویر است. j پوشش ابر (%) است، پپمنایکسهل،jدرصد کل پیکسل های به وضوح مشاهده شده است، و متعداد پیکسل های تصویر است.
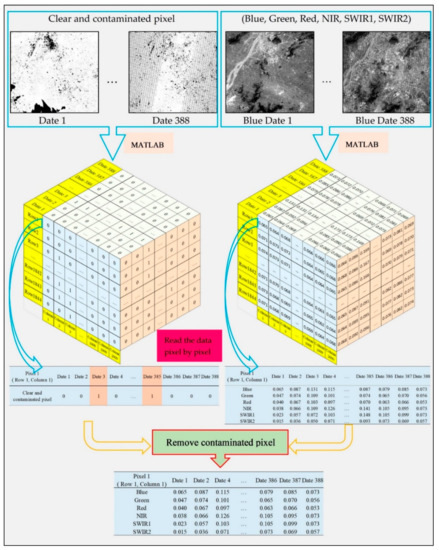
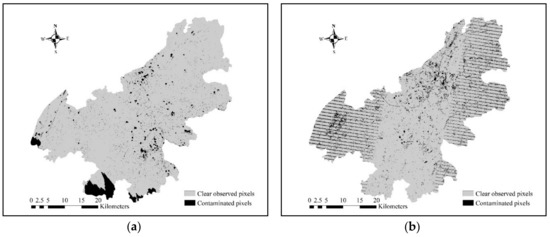
تشخیص پیکسل به وضوح مشاهده شده و آلوده
الگوریتم توسعه یافته توسط Zhu و Woodcock [ 45 ] برای شناسایی پیکسل های آلوده در این مطالعه به کار گرفته شد. در عمل، مقادیر بازتاب سطحی باند سبز و باند SWIR1 دادههای لندست ابتدا به یک مدل سری زمانی (HA) تبدیل شدند و مشاهدات واقعی لندست با امواج هارمونیک مشتق شده مربوطه مقایسه شدند تا پیکسلهای آلوده را تشخیص دهند. با استفاده از دو شرط در معادلات (3) و (4)، همانطور که توسط ژو و وودکاک [ 45 ] پیشنهاد شده است.
جایی که x تاریخ جولیان است، ρ(آبی، x)، و ρ(SWIR1، x) مقادیر مشاهده شده Landsat در تاریخ جولیان x هستند، و ρ^(آبی، x) RIRLS و ρ^(SWIR1,x) RIRLS مقادیر پیشبینیشده Landsat در تاریخ ژولیان x هستند.
تبدیل اعداد دیجیتال به بازتاب طیفی
در این مطالعه، محصول سطح 1 لندست با استفاده از رابطه (5)، همانطور که توسط [ 66 ، 67 ] پیشنهاد شده است، به بازتاب طیفی آن تبدیل شد .
جایی که ρλ”بازتاب طیفی، M ρ ضریب پوستهگذاری ضربی بازتاب، A ρ ضریب مقیاسبندی افزایشی بازتاب، و Qcal مقدار عدد دیجیتال است.
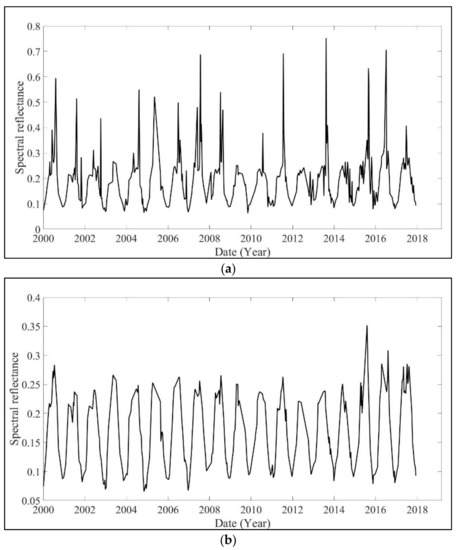
بازسازی بازتاب طیفی سری زمانی
2.3.2. طبقه بندی LULC چند زمانی با استفاده از HA با الگوریتم حداقل فاصله طیفی
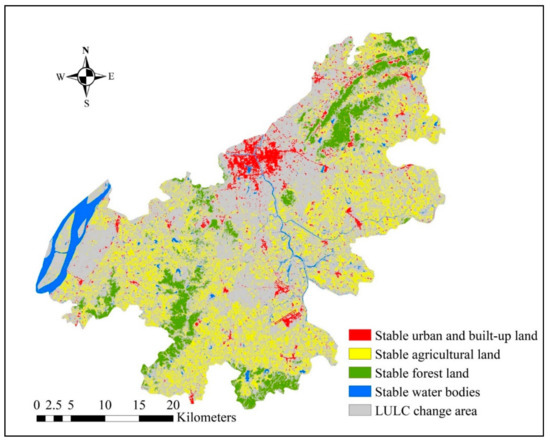
پیکسل های پایدار استخراج نوع LULC
تبدیل منحنی تابع هارمونیک و ساخت منحنی هارمونیک استاندارد
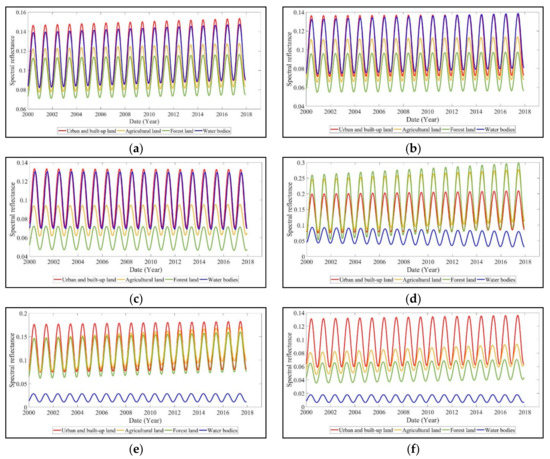
برای به دست آوردن مشخصه منحنی هارمونیک انواع مختلف LULC، پیکسل های پایدار انتخاب شده برای هر نوع LULC بین سال های 2000 و 2017 ابتدا با استفاده از رابطه (6)، اصلاح شده از زو و وودکاک [ 45 ] به یک منحنی هارمونیک طیفی تبدیل شدند.
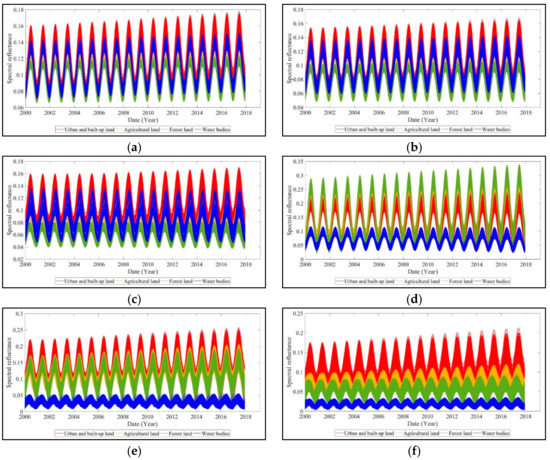
که در آن t تاریخ جولیان است، i i مین باند لندست است، T تعداد روزهای در سال (T= 365)، a i ضریب مقدار قطع، b i ضریب مقدار شیب، A است. i ضریب مقدار دامنه است، φمنضریب مقدار فاز است و y مقدار بازتاب بازسازی شده در تاریخ ژولیان t است. در این مطالعه، باندهای طیفی معمولی بین لندست 5، 7 و 8 (یعنی آبی، سبز، قرمز، NIR، SWIR1 و SWIR2) برای تبدیل تابع منحنی هارمونیک انتخاب شدند.
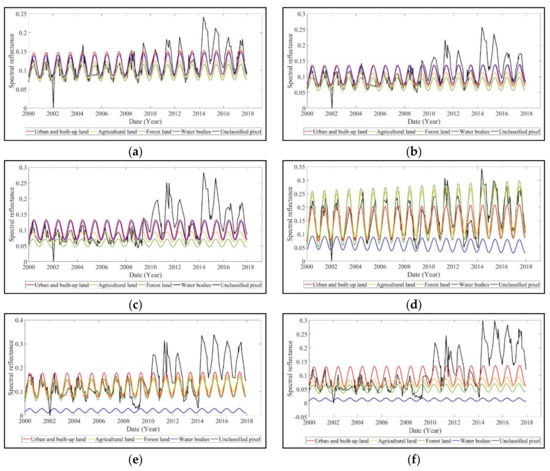
اندازه گیری فاصله طیفی و محاسبه احتمال
در عمل، ابتدا معادلات (7) و (8) برای محاسبه حداکثر و حداقل فاصله طیفی بین منحنیهای تابع هارمونیک استاندارد هر نوع LULC (U، A، F و W) و یک پیکسل طبقهبندینشده در هر زمان خاص اعمال شد. نقطه. سپس، مقادیر حداکثر و حداقل از هر نوع LULC در همان نقطه زمانی خاص برای محاسبه فاصله طیفی نرمال شده بین منحنی تابع هارمونیک استاندارد هر نوع LULC (U، A، F، و W) و یک پیکسل طبقهبندی نشده استفاده شد. در همان نقطه زمانی خاص با استفاده از معادلات (9) – (12)، به ترتیب. به این ترتیب، کمترین فاصله طیفی نرمال شده بین هر نوع LULC و یک پیکسل طبقه بندی نشده (یعنی زمانی که فاصله طیفی برابر با 0 باشد) بیشترین احتمال را برای یک نوع خاص LULC فراهم می کند (یعنی احتمال برابر با 1 است).
جایی که آرUمنj، آرآمنj، آرافمنj، و آردبلیومنjبازتاب طیفی منحنی های تابع هارمونیک استاندارد U، A، F و W به ترتیب در نقطه زمانی i با استفاده از باند j هستند. آرایکسمنjبازتاب طیفی یک پیکسل طبقه بندی نشده در نقطه زمانی i با استفاده از باند j است.
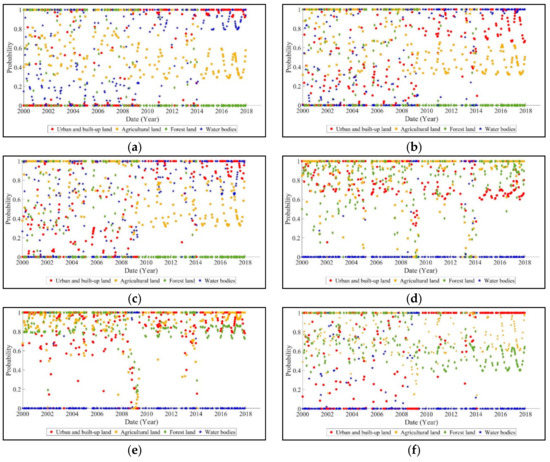
در مرحله بعد، فاصله طیفی نرمال شده یک پیکسل طبقه بندی نشده به هر نوع LULC برای محاسبه احتمال اینکه یک پیکسل طبقه بندی نشده یک نوع LULC خاص (U، A، F، و W) باشد به ترتیب با استفاده از معادلات (13)-(16) اعمال شد. .
جایی که پroبآبمنلمنتیyUمنj، پroبآبمنلمنتیyآمنj، پroبآبمنلمنتیyافمنjو پroبآبمنلمنتیyدبلیومنjاحتمال اینکه یک پیکسل طبقه بندی نشده به ترتیب U، A، F و W در نقطه زمانی i با استفاده از باند j باشد.
طبقه بندی LULC چند زمانی
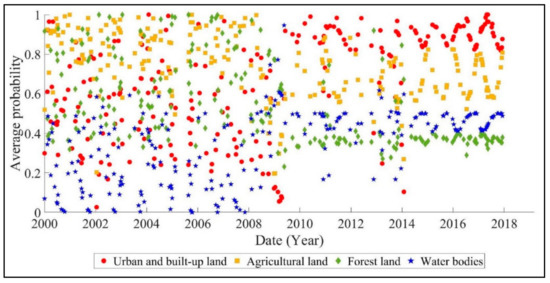
در این مطالعه، هر شش باند طیفی استاندارد Landsat 5، 7، و 8، شامل باندهای آبی، سبز، قرمز، NIR، SWIR1 و SWIR2 برای طبقهبندی LULC چند زمانی اعمال شد. به این ترتیب، میانگین احتمالات یک پیکسل طبقهبندینشده یک نوع LULC خاص (U، A، F، و W) از میان شش باند طیفی ابتدا بهطور جداگانه با استفاده از معادلات (17) – (20) محاسبه شد. سپس، میانگین احتمالات یک پیکسل طبقهبندینشده یک نوع LULC خاص (U، A، F، و W) از میان چهار نوع LULC برای شناسایی بالاترین مقدار مقایسه شد. نوع LULC مربوطه که بالاترین احتمال را فراهم می کند، سپس در یک نقطه زمانی خاص به پیکسل طبقه بندی نشده اختصاص داده شد.
جایی که، آvهrآgه پroبآبمنلمنتیyUمن، آvهrآgه پroبآبمنلمنتیyآمن، آvهrآgه پroبآبمنلمنتیyافمن، و آvهrآgه پroبآبمنلمنتیyدبلیومناحتمال اینکه یک پیکسل طبقه بندی نشده به ترتیب U، A، F و W در نقطه زمانی i با استفاده از شش باند باشد.
ارزیابی دقت
3. نتایج
3.1. انتخاب داده های Landsat بر اساس ارزیابی پوشش ابری
3.2. انتخاب مجدد داده های لندست با استفاده از باند QA و مدل HA
3.3. داده های بازتاب طیفی
3.4. بازسازی بازتاب طیفی سری زمانی
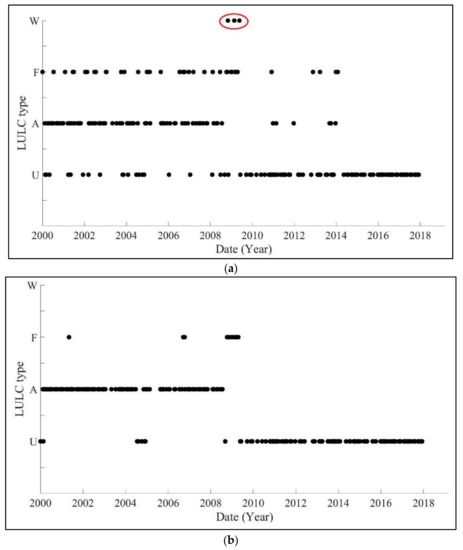
3.5. منطقه پایدار استخراج نوع LULC
3.6. منحنی تابع هارمونیک طیفی انواع LULC
3.7. منحنی تابع هارمونیک استاندارد هر نوع LULC
3.8. اندازه گیری فاصله طیفی
3.9. احتمال اینکه یک پیکسل طبقه بندی نشده یک نوع LULC خاص باشد
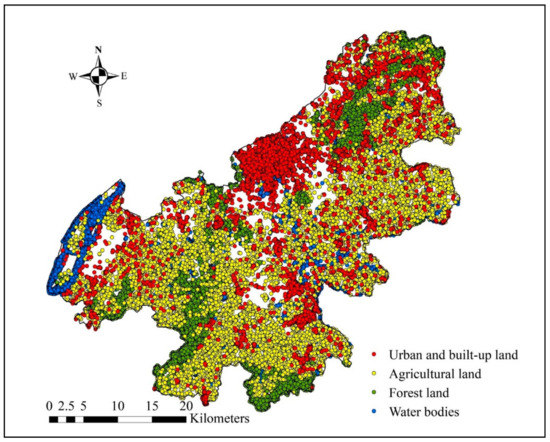
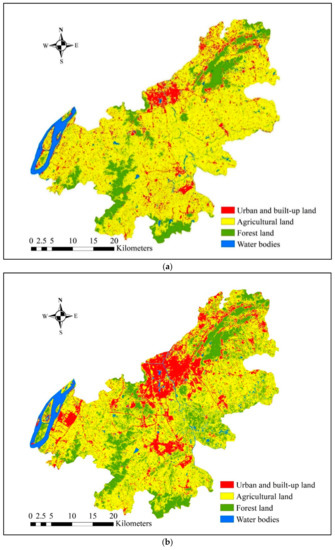
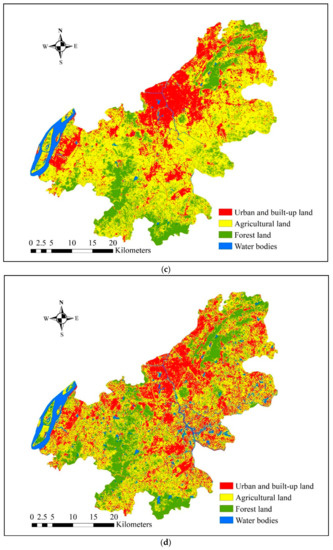
3.10. طبقه بندی و نقشه برداری چند زمانی LULC
3.11. ارزیابی دقت نقشه LULC
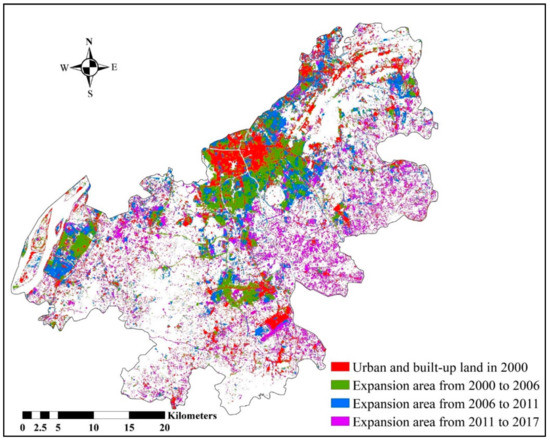
3.12. ارزیابی دقت تشخیص تغییر
4. بحث
4.1. مراحل انتخاب تصویر لندست
4.2. بازسازی بازتاب طیفی سری زمانی نیمه اتوماتیک
4.3. تکنیک استخراج یک منطقه پایدار برای هر نوع LULC
4.4. رویکرد طبقه بندی نظارت شده برای نقشه برداری LULC چند زمانی با استفاده از تحلیل هارمونیک با الگوریتم حداقل فاصله طیفی
4.5. ارزیابی دقت نقشه های LULC
5. نتیجه گیری ها
منابع
- Jensen, JR مقدماتی پردازش تصویر دیجیتال: دیدگاه سنجش از دور . چاپخانه پرنتیس هال: رودخانه فوقانی زین، نیوجرسی، ایالات متحده آمریکا، 2015; پ. 544. [ Google Scholar ]
- Lo, CP; Quattrochi، DA تغییر کاربری زمین و پوشش زمین، پدیده جزیره گرمایی شهری، و پیامدهای سلامت: رویکرد سنجش از دور. فتوگرام مهندس Remote Sens. 2003 , 69 , 1053-1063. [ Google Scholar ] [ CrossRef ]
- وارنر، TA; المطیری، ع. لی، JY سنجش از دور تغییر پوشش زمین ; SAGE Publications Ltd.: لندن، انگلستان، 2009; پ. 568. [ Google Scholar ]
- ونگ، کیو. فو، پی. Gao, F. ایجاد دمای روزانه سطح زمین در وضوح Landsat با ترکیب داده های Landsat و MODIS. سنسور از راه دور محیط. 2014 ، 145 ، 55-67. [ Google Scholar ] [ CrossRef ]
- مایر، WB; ترنر، تغییرات BLI در کاربری زمین و پوشش زمین: چشم انداز جهانی . انتشارات دانشگاه کمبریج: کمبریج، انگلستان، 1994; پ. 537. [ Google Scholar ] [ CrossRef ]
- الشلبی، م. پرادان، بی. بیلا، ال. منصور، س. آلتووینی، تجلی داده های سنجش از دور در مدل سازی پراکندگی شهری با استفاده از مدل SLEUTH و کالیبراسیون نیروی بی رحم: مطالعه موردی شهر صنعا، یمن. J. شرکت هندی Remote Sens. 2013 , 41 , 405-416. [ Google Scholar ] [ CrossRef ]
- نیش، سی. آهنگ، جی. ژانگ، Q. لی، ام. توسعه شکلگیری و الگوهای ناهمگونی فضایی برای سیستم ساختاری تراکمهای شهری در چین. Acta Geogr. گناه 2005 ، 60 ، 827-840. [ Google Scholar ]
- ترنر، BL; مایر، WB; Skole، DL جهانی تغییر کاربری زمین/پوشش زمین: به سوی یک مطالعه یکپارچه. آمبیو 1994 ، 23 ، 91-95. [ Google Scholar ]
- تولسا، تی. سنبتا، اف. Kidane, M. تاثیر تغییر کاربری/پوشش زمین بر خدمات اکوسیستم در ارتفاعات مرکزی اتیوپی. اکوسیستم. خدمت 2017 ، 23 ، 47-54. [ Google Scholar ] [ CrossRef ]
- Seto، KC; Fragkias، M. کمی سازی الگوهای مکانی-زمانی تغییر کاربری زمین شهری در چهار شهر چین با معیارهای منظر سری زمانی. Landsc. Ecol. 2005 ، 20 ، 871-888. [ Google Scholar ] [ CrossRef ]
- عبدالله، AYM; مسرور، ع. عدنان، MSG; باکی، MAA؛ حسن، ق.ک. دیوان، الف. الگوهای مکانی-زمانی استفاده از زمین/تغییر پوشش زمین در منطقه ساحلی ناهمگن بنگلادش بین سالهای 1990 تا 2017. Remote Sens. 2019 ، 11 ، 790. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Fonseka، HPU؛ ژانگ، اچ. سان، ی. سو، اچ. لین، اچ. Lin, Y. شهرنشینی و تأثیرات آن بر دمای سطح زمین در منطقه شهری کلمبو، سریلانکا، از سال 1988 تا 2016. Remote Sens. 2019 , 11 , 957. [ Google Scholar ] [ CrossRef ][ Green Version ]
- Buitre، MJC; ژانگ، اچ. لین، اچ. جنگلهای حرا تغییر و تأثیرات طوفانهای استوایی در فیلیپین با استفاده از تصاویر ماهوارهای سری زمانی. Remote Sens. 2019 , 11 , 688. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- می، جی. یانگ، ی. ژانگ، اس. آن، اس. هو، اچ. هوآ، ی. چن، اف. ردیابی تغییر کاربری/پوشش زمین در یک منطقه با استخراج زیرزمینی و احیای جنگل از طریق طبقهبندی مستمر Landsat. Remote Sens. 2019 , 11 , 1719. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لو، دی. لی، ال. لی، جی. فن، پ. اویانگ، ز. موران، ای. بررسی الگوهای فضایی توزیع شهری و تأثیرات شرایط فیزیکی بر شهرنشینی در کلانشهرهای ساحلی و داخلی. Remote Sens. 2018 , 10 , 1101. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لاسردا سیلوا، آ. سالاس آلوز، دی. Pinheiro Ferreira، M. ارزیابی تغییر کاربری زمین مبتنی بر Landsat در جنگل اقیانوس اطلس برزیل: انتقال جنگل و گسترش نیشکر. Remote Sens. 2018 , 10 , 996. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- موباکو، اس. بلحاج، ا. هیمن، جی. هارگرو، دبلیو. ریس، سی. نظارت بر تغییرات کاربری/پوشش زمین در حوضه خشک فرامرزی ریو گراند میانی با استفاده از سنجش از دور. Remote Sens. 2018 ، 10 ، 2005. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- گوناریدیس، دی. سیمئوناکیس، ای. کوریانوپولوس، آی. کوکولاس، اس. گنجاندن تراکم در الگوهای تغییر کاربری/پوشش زمین-زمانی: مورد آتیکا، یونان. Remote Sens. 2018 , 10 , 1034. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هورنی، ک. اشنایدر، ا. هاینیمن، ا. Nong، DH; فاکس، جی. نقشهبرداری از گسترش محصولات پررونق در سرزمین اصلی آسیای جنوب شرقی با استفاده از پشتههای زمانی متراکم دادههای Landsat. Remote Sens. 2017 , 9 , 320. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Wingate، VR؛ Phinn, SR; کوهن، ن. بلومرتز، ال. Dhanjal-Adams، نقشه برداری KL تغییرات پوشش زمین ده ساله در جنگل های شمال شرقی نامیبیا از سال 1975 تا 2014 با استفاده از داده های آرشیو شده ماهواره لندست. Remote Sens. 2016 ، 8 ، 681. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- القرشی، اف. کومار، ال. سینها، ص. مدلسازی تغییر پوشش زمین شهری با استفاده از تصاویر ماهوارهای سری زمانی: مطالعه موردی رشد شهری در پنج شهر عربستان سعودی. Remote Sens. 2016 , 8 , 838. [ Google Scholar ] [ CrossRef ][ Green Version ]
- ویتک، ام. برینک، ا. دانی، اف. سیمونتی، دی. Desclée, B. نظارت بر تغییر پوشش زمین با استفاده از دادههای تصویر ماهوارهای Landsat MSS/TM در غرب آفریقا بین سالهای 1975 و 1990. Remote Sens. 2014 , 6 , 658-676. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فو، پی. Weng, Q. تحلیل سری زمانی شهرنشینی ناشی از تغییر کاربری زمین و پوشش زمین و تأثیر آن بر دمای سطح زمین با تصاویر Landsat. سنسور از راه دور محیط. 2016 ، 175 ، 205-214. [ Google Scholar ] [ CrossRef ]
- گیلندرز، SN; Coops، NC; Wulder، MA; Gergel، SE; نلسون، تی. سنجش از راه دور چند زمانی دینامیک منظر و تغییر الگو: توصیف روندهای طبیعی و انسانی. Prog. فیزیک Geogr. محیط زمین. 2008 ، 32 ، 503-528. [ Google Scholar ] [ CrossRef ]
- گومز، سی. سفید، JC; Wulder، MA داده های سری زمانی سنجش از دور نوری برای طبقه بندی پوشش زمین: یک بررسی. ISPRS J. Photogramm. Remote Sens. 2016 , 116 , 55–72. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گری، جی. Song, C. طبقهبندی ثابت سریهای زمانی تصویر با تعمیم امضای تطبیقی خودکار. سنسور از راه دور محیط. 2013 ، 134 ، 333-341. [ Google Scholar ] [ CrossRef ]
- آهنگ، سی. Woodcock، CE; Seto، KC; لنی، نماینده مجلس؛ Macomber، SA طبقه بندی و تشخیص تغییر با استفاده از داده های Landsat TM: چه زمانی و چگونه اثرات جوی را اصلاح کنیم؟ سنسور از راه دور محیط. 2001 ، 75 ، 230-244. [ Google Scholar ] [ CrossRef ]
- لیو، دی. Cai, S. یک رویکرد مدلسازی مکانی-زمانی برای بازسازی مسیرهای تغییر پوشش زمین از تصاویر ماهواره ای چند زمانی. ان دانشیار صبح. Geogr. 2012 ، 102 ، 1329-1347. [ Google Scholar ] [ CrossRef ]
- پولیو، دی. لاتیفویچ، آر. زابچیچ، ن. گیندون، ال. Olthof، I. توسعه و ارزیابی یک سری زمانی پوشش زمین سالانه MODIS با وضوح فضایی 250 متری (2000-2011) برای منطقه جنگلی کانادا که از به روز رسانی مبتنی بر تغییر به دست آمده است. سنسور از راه دور محیط. 2014 ، 140 ، 731-743. [ Google Scholar ] [ CrossRef ]
- White, MA; de Beurs، KM; دیدان، ک. Inouye، DW; ریچاردسون، AD; جنسن، OP; اوکیف، جی. ژانگ، جی. نمانی، ر.ر. ون WJD، L. و همکاران مقایسه، تفسیر و ارزیابی فنولوژی بهار در آمریکای شمالی از سنجش از دور برای سالهای 1982-2006 برآورد شده است. گلوب. چانگ. Biol. 2009 ، 15 ، 2335-2359. [ Google Scholar ] [ CrossRef ]
- جولین، ی. سوبرینو، جی. Verhoef, W. تغییرات در دمای سطح زمین و مقادیر NDVI در اروپا بین سالهای 1982 و 1999. سنسور از راه دور محیط زیست. 2006 ، 103 ، 43-55. [ Google Scholar ] [ CrossRef ]
- Jakubauskas، ME; Legates, DR; Kastens، JH شناسایی محصول با استفاده از تحلیل هارمونیک داده های سری زمانی AVHRR NDVI. محاسبه کنید. الکترون. کشاورزی 2002 ، 37 ، 127-139. [ Google Scholar ] [ CrossRef ]
- عزالی، س. Menenti، M. نقشه برداری مجتمع های پوشش گیاهی-خاک-اقلیم در جنوب آفریقا با استفاده از تحلیل فوریه زمانی داده های NOAA-AVHRR NDVI. بین المللی J. Remote Sens. 2000 , 21 , 973-996. [ Google Scholar ] [ CrossRef ]
- مننتی، م. عزالی، س. ورهوف، دبلیو. ون سوول، آر. نقشهبرداری مناطق آگرواکولوژیک و تاخیر زمانی در رشد پوشش گیاهی با استفاده از تحلیل فوریه سریهای زمانی تصاویر NDVI. Adv. Space Res. 1993 ، 13 ، 233-237. [ Google Scholar ] [ CrossRef ]
- کینان، TF; گری، جی. فریدل، MA; تومی، م. بوهرر، جی. هالینگر، دی. Munger، JW; اوکیف، جی. اشمید، اچ پی؛ بال، IS; و همکاران جذب خالص کربن از طریق تغییرات ناشی از گرم شدن در فنولوژی جنگل های معتدل افزایش یافته است. نات. صعود چانگ. 2014 ، 4 ، 598. [ Google Scholar ] [ CrossRef ]
- جیا، ال. شانگ، اچ. در آغوش گرفتن.؛ Menenti، M. پاسخ فنولوژیکی پوشش گیاهی به جریان رودخانه بالادست در حوضه رودخانه هیهه با تجزیه و تحلیل سری های زمانی داده های MODIS. هیدرول. سیستم زمین علمی 2011 ، 15 ، 1047-1064. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- واردلو، بی.دی. اگبرت، اس ال. Kastens، JH تجزیه و تحلیل داده های شاخص پوشش گیاهی سری زمانی MODIS 250 متر برای طبقه بندی محصولات در دشت های بزرگ مرکزی ایالات متحده. سنسور از راه دور محیط. 2007 ، 108 ، 290-310. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- واردلو، بی.دی. Egbert، SL نقشه برداری محصول در سطح وسیع با استفاده از داده های NDVI MODIS 250 متری سری زمانی: ارزیابی برای دشت های بزرگ مرکزی ایالات متحده. سنسور از راه دور محیط. 2008 ، 112 ، 1096-1116. [ Google Scholar ] [ CrossRef ]
- سپسکبیل، ص. شول، ام. استفاده از زمین/پوشش زمین حوضه رودخانه تورال، H. گنگ و سند (LULC) و نقشهبرداری مناطق آبی با استفاده از جریانهای پیوسته دادههای MODIS. سنسور از راه دور محیط. 2005 ، 95 ، 317-341. [ Google Scholar ] [ CrossRef ]
- شوخ طبعی، AD; Su، B. استخراج شاخص های فنولوژیکی از داده های SPOT-VGT با استفاده از الگوریتم HANTS. در 1998-2004: 6 سال فعالیت های عملیاتی، مجموعه مقالات دومین کنفرانس بین المللی کاربر گیاه گیاهی، آنتورپ، بلژیک، 24 تا 26 مارس . EC: لوکزامبورگ، 2004; صص 195-201. [ Google Scholar ]
- وانکاتسم، سی. پکل، جی اف. اورارد، سی. Malaisse, F. Defourny، P. نقشه برداری و توصیف انواع پوشش گیاهی جمهوری دموکراتیک کنگو با استفاده از سری زمانی SPOT VEGETATION. بین المللی J. Appl. زمین Obs. Geoinf. 2009 ، 11 ، 62-76. [ Google Scholar ] [ CrossRef ]
- وربیرن، اس. ایرنس، اچ. پیکارد، آی. باوونز، آی. Van Orshoven، J. طبقهبندی زیرپیکسلی سریهای زمانی SPOT-VEGETATION برای ارزیابی مناطق زراعی منطقهای در بلژیک. بین المللی J. Appl. زمین Obs. Geoinf. 2008 ، 10 ، 486-497. [ Google Scholar ] [ CrossRef ]
- Woodcock، CE; آلن، آر. اندرسون، ام. بلوارد، ا. بیندشادلر، آر. کوهن، دبلیو. گائو، اف. گووارد، SN; هلدر، دی. هلمر، ای. و همکاران دسترسی رایگان به تصاویر لندست. Science 2008 , 320 , 1011. [ Google Scholar ] [ CrossRef ]
- زو، ز. Woodcock، CE; هولدن، سی. یانگ، زی. تولید تصاویر مصنوعی Landsat بر اساس تمام داده های Landsat موجود: پیش بینی بازتاب سطح Landsat در هر زمان معین. سنسور از راه دور محیط. 2015 ، 162 ، 67-83. [ Google Scholar ] [ CrossRef ]
- زو، ز. Woodcock، CE تشخیص تغییر مداوم و طبقه بندی پوشش زمین با استفاده از تمام داده های موجود لندست. سنسور از راه دور محیط. 2014 ، 144 ، 152-171. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زو، ز. Woodcock، CE; اولوفسون، پی. نظارت مستمر بر اختلالات جنگل با استفاده از تمام تصاویر موجود لندست. سنسور از راه دور محیط. 2012 ، 122 ، 75-91. [ Google Scholar ] [ CrossRef ]
- راپینل، اس. مانی، سی. لکوک، ال. کلمنت، بی. توماس، ا. Hubert-Moy, L. ارزیابی سری زمانی Sentinel-2 برای نقشه برداری جوامع گیاهی مرتع دشت سیلابی. سنسور از راه دور محیط. 2019 ، 223 ، 115-129. [ Google Scholar ] [ CrossRef ]
- پرسون، م. لیندبرگ، ای. ریس، اچ. طبقه بندی گونه های درختی با داده های چند زمانی نگهبان-2. Remote Sens. 2018 ، 10 ، 1794. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- روی، DP; Wulder، MA; لاولند، TR; Woodcock، CE; آلن، آر جی. اندرسون، ام سی؛ هلدر، دی. آیرونز، جی آر. جانسون، دی.م. کندی، آر. و همکاران Landsat-8: علم و چشم انداز محصول برای تحقیقات تغییرات جهانی زمینی. سنسور از راه دور محیط. 2014 ، 145 ، 154-172. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هرموسیلا، تی. Wulder، MA; سفید، JC; Coops، NC; Hobart، GW یک پروتکل سری زمانی لندست یکپارچه برای تشخیص تغییر و تولید کامپوزیت های بازتاب سطحی سالانه بدون شکاف. سنسور از راه دور محیط. 2015 ، 158 ، 220-234. [ Google Scholar ] [ CrossRef ]
- هوانگ، سی. گووارد، SN; ماسک، جی جی. توماس، ن. زو، ز. Vogelmann, JE یک رویکرد خودکار برای بازسازی تاریخچه اختلالات اخیر جنگل با استفاده از پشته های سری زمانی متراکم Landsat. سنسور از راه دور محیط. 2010 ، 114 ، 183-198. [ Google Scholar ] [ CrossRef ]
- کندی، RE; کوهن، WB; شرودر، تشخیص تغییر مبتنی بر مسیر TA برای توصیف خودکار دینامیک اختلال جنگل. سنسور از راه دور محیط. 2007 ، 110 ، 370-386. [ Google Scholar ] [ CrossRef ]
- یانگ، ایکس. Lo, CP با استفاده از یک سری زمانی از تصاویر ماهواره ای برای شناسایی تغییرات کاربری و پوشش زمین در منطقه شهری آتلانتا، جورجیا. بین المللی J. Remote Sens. 2002 ، 23 ، 1775-1798. [ Google Scholar ] [ CrossRef ]
- وربسلت، ج. هیندمن، آر. نیونهام، جی. Culvenor، D. تشخیص روند و تغییرات فصلی در سری های زمانی تصاویر ماهواره ای. سنسور از راه دور محیط. 2010 ، 114 ، 106-115. [ Google Scholar ] [ CrossRef ]
- Immerzeel، WW; کیروز، RA; de Jong، SM درک الگوهای بارش و تعامل کاربری زمین در تبت با استفاده از تحلیل هارمونیک سری زمانی SPOT VGT-S10 NDVI. بین المللی J. Remote Sens. 2005 ، 26 ، 2281-2296. [ Google Scholar ] [ CrossRef ]
- Sellers, PJ; راندال، دی. کولاتز، جی جی; بری، جی. فیلد، CB; دازلیچ، دی. ژانگ، سی. Collelo، GD; Bounoua، L. اصلاح شده پارامترهای سطح زمین (SiB2) برای GCMS اتمسفر. بخش اول: فرمولاسیون مدل. جی. کلیم. 1996 ، 9 ، 676-705. [ Google Scholar ] [ CrossRef ]
- Sellers, PJ; تاکر، سی جی; کولاتز، جی جی; Los, SO; عدالت، CO; دازلیچ، دی. Randall، DA A تجدید نظر در پارامترهای سطح زمین (SiB2) برای GCMS جوی. بخش دوم: تولید میدان های جهانی پارامترهای بیوفیزیکی زمینی از داده های ماهواره ای. جی. کلیم. 1996 ، 9 ، 706-737. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ونگ، کیو. لو، دی. Schubring، J. برآورد رابطه دمای سطح زمین و فراوانی پوشش گیاهی برای مطالعات جزیره گرمایی شهری. سنسور از راه دور محیط. 2004 ، 89 ، 467-483. [ Google Scholar ] [ CrossRef ]
- شانگ، اچ. جیا، ال. Menenti، M. تجزیه و تحلیل الگوی آبگرفتگی دشت سیلابی دریاچه پویانگ توسط داده های مایکروویو غیرفعال. J. Hydrometeorol. 2015 ، 16 ، 652-667. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مننتی، م. مالامیری، HRG; شانگ، اچ. Alfieri, SM; مافی، سی. Jia, L. مشاهده پاسخ پوشش گیاهی زمینی به تغییرپذیری آب و هوا در طیفی از مقیاس های زمانی توسط تجزیه و تحلیل سری های زمانی دمای سطح زمین . Springer Verlag: هایدلبرگ، آلمان، 2016; پ. 447. [ Google Scholar ]
- Geerken، RA الگوریتمی برای طبقه بندی و نظارت بر تغییرات فصلی در فنولوژی های پوشش گیاهی و تغییرات بین سالانه آنها. ISPRS J. Photogramm. Remote Sens. 2009 , 64 , 422-431. [ Google Scholar ] [ CrossRef ]
- MOHURD. سالنامه آماری ساخت و ساز شهری ; MOHURD: پکن، چین، 2017. [ Google Scholar ]
- NJMBS. سالنامه آماری نانجینگ ; اداره آمار شهرداری نانجینگ: نانجینگ، چین، 2017. [ Google Scholar ]
- USGS. راهنمای کاربر ابزار QA Landsat ; وزارت کشور، سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2017; پ. 33. [ Google Scholar ]
- ویسنته-سرانو، اس ام. پرز-کابلو، اف. لاسانتا، تی. ارزیابی تکنیکهای تصحیح رادیومتری در تحلیل تغییرپذیری و تغییر پوشش گیاهی با استفاده از سریهای زمانی تصاویر Landsat. سنسور از راه دور محیط. 2008 ، 112 ، 3916-3934. [ Google Scholar ] [ CrossRef ]
- USGS. راهنمای محصول Landsat 4-7 Surface Reflectance (LEDAPS) . وزارت کشور، سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2019؛ پ. 38. [ Google Scholar ]
- USGS. راهنمای محصول Landsat 8 Surface Reflectance Code (LaSRC) . وزارت کشور، سازمان زمین شناسی ایالات متحده: Reston، VA، ایالات متحده آمریکا، 2019؛ پ. 39. [ Google Scholar ]
- لایکا راهنمای میدانی ERDAS Leica Geosystems Geospatial Imaging, LLC: Norcross, GA, USA, 2005; پ. 770. [ Google Scholar ]
- تویا، دی. پرسلو، سی. Bruzzone، L. تطبیق دامنه برای طبقه بندی داده های سنجش از دور: مروری بر پیشرفت های اخیر. IEEE Geosci. سنسور از راه دور Mag. 2016 ، 4 ، 41-57. [ Google Scholar ] [ CrossRef ]
- کوهن، WB; یانگ، ز. کندی، آر. تشخیص روند در آشفتگی و بازیابی جنگل با استفاده از سری های زمانی سالانه Landsat: 2. TimeSync-ابزارهایی برای کالیبراسیون و اعتبارسنجی. سنسور از راه دور محیط. 2010 ، 114 ، 2911-2924. [ Google Scholar ] [ CrossRef ]
- Russell, GC Assessing the Accuracy of Remotely Sensed Data – Principles and Practices , 2nd ed.; CRC Press, Taylor & Francis Group: Boca Raton, NW, USA, 2009; پ. 210. [ Google Scholar ]
- Tortora، RD نکته ای در مورد تخمین اندازه نمونه برای جمعیت های چند جمله ای. صبح. آمار 1978 ، 32 ، 100-102. [ Google Scholar ] [ CrossRef ]
- هوانگ، سی. آهنگ، ک. کیم، اس. تاونشند، جی آر جی؛ دیویس، پی. ماسک، جی جی. Goward، SN استفاده از مفهوم شیء تاریک و ماشینهای بردار پشتیبانی برای خودکارسازی تحلیل تغییر پوشش جنگل. سنسور از راه دور محیط. 2008 ، 112 ، 970-985. [ Google Scholar ] [ CrossRef ]
- Ahlqvist, O. گسترش تشخیص تغییر پس از طبقه بندی با استفاده از معیارهای تشابه معنایی برای غلبه بر ناهمگونی طبقاتی: مطالعه ای در مورد تغییرات پایگاه داده پوشش زمین ملی ایالات متحده در سال های 1992 و 2001. سنسور از راه دور محیط. 2008 ، 112 ، 1226-1241. [ Google Scholar ] [ CrossRef ]
- گریفیث، پی. هاسترت، پ. گروبنر، او. der Linden، SV نقشه برداری رشد کلان شهر با داده های چند سنسوری. سنسور از راه دور محیط. 2010 ، 114 ، 426-439. [ Google Scholar ] [ CrossRef ]
- Tsai، YH; استو، دی. Weeks, J. مقایسه رویکردهای تحلیل تصویر مبتنی بر شی برای نقشهبرداری از ساختمانهای جدید در آکرا، غنا با استفاده از تصاویر ماهوارهای QuickBird چند زمانی. Remote Sens. 2011 , 3 , 2707–2726. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رکنی، ک. احمد، ع. سلیمانی، ک. Hazini، S. یک رویکرد جدید برای تشخیص تغییر آب سطحی: ادغام تکنیکهای ترکیب تصویر سطح پیکسل و طبقهبندی تصویر. بین المللی J. Appl. زمین Obs. Geoinf. 2015 ، 34 ، 226-234. [ Google Scholar ] [ CrossRef ]
- اندرسون، جی آر. هاردی، EE; روچ، JT; Witmer, RE A سیستم طبقه بندی کاربری و پوشش زمین برای استفاده با داده های سنسور از راه دور . USGS: Reston، VA، ایالات متحده آمریکا، 1976; پ. 28. [ Google Scholar ]
- لندیس، جی آر. Koch, GG توافق اندازه گیری ناظر برای داده های طبقه بندی شده. بیومتریک 1977 ، 33 ، 159-174. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گبهارت، اس. ورمن، تی. رویز، مام؛ مائده، پ. بیشاپ، جی. شرام، ام. کپینیگ، آر. کارتوس، او. کلندورفر، جی. رسل، آر. و همکاران MAD-MEX: مانیتورینگ خودکار پوشش زمین دیوار به دیوار برای برنامه REDD-MRV مکزیکی با استفاده از تمام داده های Landsat. Remote Sens. 2014 , 6 , 3923–3943. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]


بدون دیدگاه