

خلاصه
ژئوانفورماتیک نقش اساسی در مرحله بهبود وضعیت پس از زلزله دارد. هدف این مقاله ارائه روش دنبال شده و نتایج بهدستآمده با استفاده از سیستمهای هواپیمای بدون سرنشین (UAS) پردازش فیلم ویدئویی 4K و اتوماسیون روشهای اطلاعات جغرافیایی است که هم نظارت بر فرآیند تخریب و هم نقشهبرداری ساختمانهای تخریب شده را هدف قرار میدهد. . مبارزات میدانی در سکونتگاه سنتی Vrisa (لسبوس، یونان) انجام شد که در 12 ژوئن 2017 توسط یک زلزله قوی (Mw=6.3) به شدت آسیب دید. به این منظور، یک کمپین پروازی در 3 فوریه 2019 انجام شد. جمع آوری فیلم های هوایی 4K با استفاده از یک هواپیمای بدون سرنشین. روش Structure from Motion (SfM) روی فریم هایی که از فیلم ویدیویی 4K مشتق شده اند، اعمال شد. برای تولید ابرهای نقطه ای سه بعدی دقیق و بسیار دقیق و همچنین مدل سطح دیجیتال (DSM) مجموعه ساختمانی شهرک سنتی وریسا، بیست ماه پس از زلزله. این مجموعه داده با مجموعه داده مربوطه که از 25 جولای 2017 چند روز پس از زلزله به دست آمده است، مقایسه شده است. دو الگوریتم برای تشخیص ساختمانهای تخریب شده منطقه آسیبدیده، به ترتیب بر اساس DSM و ابرهای نقطه سهبعدی توسعه داده شدهاند. نتایج بهدستآمده از طریق مطالعات میدانی مورد آزمایش قرار گرفتهاند و نشان میدهند که این روش در تشخیص تخریب ساختمان عملی و مؤثر است و نتایج بسیار دقیقی (97%) ارائه میدهد و به موازات آن، به راحتی قابل اجرا است و برای نقشهبرداری سریع تخریب در مرحله بازیابی مناسب است. سناریوی پس از زلزله
کلید واژه ها:
نگاشت تغییرات سه بعدی ؛ تخریب ساختمان ; مدیریت پس از زلزله ؛ ویدیوی 4K ؛ UAS
1. معرفی
زلزله یک رویداد نادر است که می تواند تأثیر قابل توجهی بر انسان و چشم انداز داشته باشد، در حالی که می تواند بر توسعه اجتماعی-اقتصادی یک منطقه نیز تأثیر بگذارد [ 1 ]. فرآیند مدیریت بلایا می تواند بر شدت فاجعه و مدت زمان عواقب آن تأثیر بگذارد. مدیریت بلایا شامل چهار مرحله است: کاهش، آمادگی، واکنش و بازیابی [ 2 ]. مرحله بازیابی با هدف بازگرداندن زندگی شهر، در سطوح پیش از مخرب، و همچنین کاهش آسیب پذیری در آینده است [ 3 ]] و دارای محدوده زمانی متغیر با توجه به طول فازهای کوتاه مدت و بلند مدت است. جریان فاز بازسازی به توصیف مناطق آسیبدیده توسط تصمیمگیرندگان، عمدتاً به سه نوع بستگی دارد: منطقه جابجایی جمعی، بازسازی در منطقه مکان اصلی و منطقه غیر فاجعه [ 4 ]. سودمندی دادههای مکانی و میدانها برای پایش تغییرات در چند سال اخیر بهطور کامل ثابت شده است. دادههای جغرافیایی مربوط به مدیریت بلایا میتوانند به زمینهای از تحقیقات کمک کنند که اطلاعات زمانی، مکانی و توصیفی را تا حدی مدیریت میکند [ 5 ]]. مسئله مقیاس هنگام بحث درباره نیازهای اطلاعات مکانی برای مسائل مدیریت بلایا بسیار مهم است. در حالی که بسیاری از قابلیتها در رصد زمین با توجه به منطقهای تا جهانی مورد توجه قرار گرفتهاند، چالش جامعه تحقیقاتی و کاربردی، انطباق تکنیکها و فنآوری تحلیل جغرافیایی برای مسائل مدیریت بلایا در سطح محلی است [ 6 ].
تکنیکهای گسترده اکتساب سهبعدی مفید بودن دادههای سه بعدی را برجسته کردهاند، زیرا درک اطلاعات مکانی با استفاده از مجموعه دادههای دوبعدی، مانند، برای مثال، یک طرح بازسازی [ 7 ] چالش برانگیز است، بهویژه اگر ارتفاع ساختمان در طول زمان تغییر کند. توسعه الگوریتم های جدید بینایی کامپیوتری به طور چشمگیری زمان مورد نیاز را کاهش می دهد و درجه اتوماسیون در تولید ابرهای نقطه سه بعدی با استفاده از تکنیک های فتوگرامتری را بهبود می بخشد. ساختار از حرکت (SfM) یک روش فتوگرامتری محاسباتی است که در آن مختصات سه بعدی یک نقطه تصویر با تجزیه و تحلیل دو یا چند عکس جمعآوریشده از موقعیتهای مختلف که همپوشانی قابلتوجهی با یکدیگر دارند، به دست میآیند [ 8 ].
تکنیکهای جمعآوری دادهها با استفاده از سیستمهای هواپیمای بدون سرنشین (UAS) امکان تولید یک مدل سهبعدی کامل با بالاترین وضوح ممکن را فراهم میکنند، که در آن UASهای سناریوی پس از زلزله میتوانند وضعیت یک منطقه را مستند کنند و ایمنی همه اپراتورها را تضمین کنند [ 9 ]. کمیسیون اروپا در حال حاضر نقش بالقوه UAS ها را در موقعیت های اضطراری و در واکنش سریع و زمینه نقشه برداری به عنوان “یک منبع جایگزین و/یا مکمل تصاویر پس از رویداد” ارزیابی می کند [ 10 ]. UAS ها می توانند راه حل های سریع و بدون زیرساخت ارائه دهند و مکملی برای عکاسی و فتوگرامتری هواپیماهای سرنشین دار بزرگتر هستند [ 11 ]]. ترکیب استفاده از UAS ها با روش فتوگرامتری SfM قبلاً برای اهداف شناسایی پس از زلزله 2009 لاکویلا، ایتالیا [ 12 ، 13 ]، زلزله سال 2016 کوماموتو، ژاپن [ 14 ]، زلزله 2016 آماتریس، ایتالیا [12، 13] استفاده شده است. 15 ]، زلزله 2016 Kaikoura، نیوزیلند [ 16 ]، و زلزله 2017 لسبوس، یونان [ 17 ، 18 ، 19 ]. علاوه بر ارزیابی سریع خسارت، UAS برای سایر بلایای مرتبط با زلزله و ساختار زمین شناسی (به عنوان مثال، رانش زمین [ 20 ، 21 ، 22 ) استفاده شده است.] و برای ارزیابی خسارت در انواع دیگر بلایا، مانند سیل [ 23 ]).
یکی از پارامترهای حیاتی در مدیریت بلایا، نیاز به کسب تصاویر جامع از یک منطقه برای پشتیبانی از نظارت به جای تمرکز بر ساختارهای خاص است [ 24 ]. رویکرد مورد استفاده برای نظارت و تشخیص تغییرات در مناطق مسکونی در طول مرحله امداد، که در آن اولویت شناسایی مناطق آسیبدیده است، با رویکردی که برای تشخیص تغییرات در مرحله بهبودی استفاده میشود، که هدف آن تعیین پیشرفت در حال انجام است، متفاوت است. روند بهبودی و همچنین تعیین ماهیت آن پیشرفت [ 25]. به خصوص در مرحله بازیابی، نقشهبرداری منظم از رابط شهری باید با استفاده از دادههای مکانی با وضوح بالا انجام شود. در دسترس بودن یک نمایش دقیق از یک پدیده فاجعه بار، مانند زلزله با استفاده از UASها، علاوه بر پشتیبانی برای اولین برآورد خسارات رخ داده، می تواند برای نظارت به موقع وضعیت پس از فاجعه و فرآیند بازیابی استفاده شود [ 26 ]. در [ 27 ]، روند بازسازی در بم، ایران پس از زلزله 2003 با استفاده از سه رویکرد برای ارزیابی جامع پیشرفت بازسازی و پایداری پروژههای بلندمدت بازیابی بلایای طبیعی ردیابی و تحلیل شد.
تشخیص تغییر (CD) یا تجزیه و تحلیل داده های سری زمانی در سه بعدی به دلیل توانایی آنها در ارائه دینامیک حجمی برای تسهیل کاربردهای بیشتر و ارائه نتایج دقیق تر، توجه زیادی را به خود جلب کرده است. روش های مختلف مزایای خود را برای انواع مختلف داده های سه بعدی دارند و انتخاب رویکرد مناسب با توجه به کاربرد و داده ها مهم است [ 28 ]. به طور تحلیلی تر، تفاوت های ارتفاع به عنوان ساده ترین راه برای محاسبه تفاوت های هندسی دو مدل سطح دیجیتال (DSM) در چندین مطالعه باقی مانده است. مندرس و همکاران [ 29 ] و ترکر و چتینکایا [ 30] اثربخشی بهرهبرداری از تفاوتهای DSM بین دو دوره به منظور شناسایی و نقشهبرداری ساختمانهای فروریخته پس از یک زلزله فاجعهبار را به ترتیب با دقت 94% و 84% نشان داد. هر دو مطالعه فقط بر اساس DSM ها هستند و نه بر روی ابرهای نقطه سه بعدی، که مجموعه داده سه بعدی اولیه است که از پردازش تصویر/ویدیو UAS مشتق شده است. از سوی دیگر، ابرهای نقطه ای تولید شده از تصاویر مورب موجود در هوا، منبع مناسبی برای ارزیابی دقیق آسیب ساختمان پس از یک رویداد فاجعه است، زیرا آنها ویژگی های هندسی و رادیومتری اساسی سقف و نمای ساختمان را ارائه می کنند [ 31 ].]. مقاله حاضر نتایج بهدستآمده از پردازش DSM و ابرهای نقطهای سهبعدی را بهمنظور درک بهتر سودمندی ابرهای نقطهای سهبعدی برای نقشهبرداری تخریب ساختمان از وضعیت پس از زلزله ارائه میکند.
هدف این مقاله ارائه روش دنبال شده و نتایج بهدستآمده از بهرهبرداری از سیستمهای هواپیمای بدون سرنشین (UAS) پردازش فیلم ویدئویی 4K و اتوماسیون روشهای اطلاعات جغرافیایی با هدف نظارت بر فرآیند تخریب و نقشهبرداری ساختمانهای تخریب شده در طول مرحله بهبود وضعیت پس از زلزله به طور خاص، این مطالعه به بررسی:
-
قابلیت استفاده از فیلم های ویدئویی 4K UASs در تولید دقیق اطلاعات 2 بعدی و 3 بعدی قادر به ارائه تغییرات چشم انداز شهری و روستایی در مرحله بازیابی یک رویداد زلزله فاجعه بار است.
-
اتوماسیون پردازش اطلاعات جغرافیایی با هدف شناسایی و نقشهبرداری ساختمانهای تخریب شده بر اساس اطلاعات سه بعدی چندزمانی (ابر نقطه سه بعدی و DSM).
حتی اگر مطالعات مختلفی برای استفاده از قابلیتهای UAS برای پایش پس از زلزله انجام شده باشد، تا جایی که میدانیم، قابلیت استفاده از ابرهای نقطه سه بعدی هنوز به طور کامل مورد بررسی قرار نگرفته است، به ویژه برای نقشهبرداری از فرآیند تخریب ساختمان در مرحله بازیابی. مطالعات قبلی عمدتاً بر استفاده از تفاوتهای دو DSM متمرکز بود، در حالی که ابرهای نقطه سه بعدی عمدتاً برای ارزیابی آسیب ساختمان بسیار امیدوارکننده بودند. نظارت بر روند بازیابی می تواند به مقامات کمک کند تا شرایطی را که ممکن است به فاجعه منجر شده است را درک کنند و توانایی کمک به مدیریت و فرآیندهای بازسازی پس از زلزله را فراهم کند، زیرا چنین اطلاعات سه بعدی و تجسم جغرافیایی می تواند به همه ذینفعان و سازمان های ملی و محلی خدمت کند. .
2. مواد و روشها
2.1. منطقه مطالعه و اکتساب داده ها
همانطور که در شکل 1 نشان داده شده است، در 12 ژوئن 2017، زمین لرزه ای به بزرگی 6.3 مگاوات در سواحل جنوب شرقی جزیره Lesvos، یونان رخ داد . یک زمین لرزه با بزرگی Mw 6.3 را می توان به عنوان یک زمین لرزه “متوسط” توصیف کرد، در مقایسه با زلزله های سایر رویدادهای جهان، مانند زمین لرزه های 2010 هائیتی و 2005 پاکستان [ 34 ]، اما این یک رویداد لرزه ای جدی برای یک کشور اروپایی است [ 35 ]. ]. اما روستای وریسا دارای بناهای بنایی مستحکم نشده بود و این امر باعث آسیب شدید روستا شد. ارزیابی کامل خسارت ساختمان ناشی از زلزله را می توان در [ 36 ] یافت]. Vrisa در سال 2002 توسط دولت یونان به عنوان یک “سکونتگاه سنتی” اعلام شد، زیرا جدا از علایق کلی معماری، ویژگی های معماری و ریخت شناسی قابل توجهی داشت و نمونه ای عالی از معماری محلی محلی بود [ 37 ].
محیط زمین شناسی و ژئومورفولوژیکی، همراه با ویژگی های ساختمان، به عنوان عوامل اصلی کنترل کننده توزیع فضایی آسیب های ساختمان شناخته شده است. به طور خاص، ترکیب سازههای بنایی قدیمی بسیار آسیبپذیر که بر روی نهشتههای آبرفتی و در دامنههایی در ناحیهای محصور شده توسط گسلهای قابل توجه در ترکیب با پدیدههای احتمالی جهت دهی، منجر به تخریب شد [ 33 ]. به طور تحلیلی تر، زمین شناسی جزیره لسبوس را می توان به عنوان زیرزمینی متشکل از سنگ های دگرگونی که توسط سازندهای پس از آلپ پوشانده شده اند، شامل سنگ های آتشفشانی میوسن و نهشته های دریایی و دریاچه ای نئوژن خلاصه کرد [ 38 ].]. با توجه به موقعیت زمین شناسی سکونتگاه وریسا، بخش غربی آن بر روی نهشته های آبرفتی هولوسن شامل رس های خاکستری و قرمز، ماسه ها و شن ها است، در حالی که قسمت شرقی آن بر روی نهشته های پلیستوسن، شامل شن های رودخانه ای، رس ها و کنگلومراها بنا شده است. ضخامت حدود 100 متر [ 36 ].
تا آنجا که به تأثیر محیط ساخته شده سکونتگاه سنتی وریسا مربوط می شود، اندکی پس از زلزله، سازمان محلی توانبخشی زلزله (ERO) بازرسی های بصری مرتبه اول و دوم را انجام داد که در آن 815 ساختمان به «سبز-ایمن برای» متمایز شدند. استفاده»، «زرد-ناایمن برای استفاده» و «قرمز-خطرناک برای استفاده»، بر اساس دستورالعمل های سازمان برنامه ریزی و حفاظت در برابر زلزله (EPPO) [ 39 ]، و بر اساس این ارزیابی خسارت با علامت مناسب مشخص شدند. در شکل 2 نشان داده شده است. طبق این قانون، ساختمان هایی که علامت قرمز دارند باید به زودی توسط مالکان تخریب شوند، در حالی که ساختمان های زرد و سبز باید تعمیر شوند. در عمل، چندین ساختمان با علامت زرد نیز ممکن است توسط صاحبانشان تخریب شوند، زیرا هزینه بازسازی آنها بسیار بالاست. لازم به ذکر است که طبق قانون و به منظور این مقاله، تخریب ساختمان شامل انتقال آوار نیز می شود.
پس از زلزله، چندین کارزار میدانی برای جمعآوری صورت گرفت: (الف) اطلاعات مربوط به ساختمانها، مانند ارزیابی آسیب ERO (قرمز، زرد و سبز)، مختصات جغرافیایی، مصالح ساخته شده (یعنی بنایی، ساختمان R/C). ) و تعداد فروشگاه ها؛ (ب) حدود 150 نقطه کنترل زمینی (GCPs) با استفاده از یک سیستم RTK. (ج) یک UAS (هگزاکوپتر) بر فراز روستای Vrisa در ارتفاع 65 متری پرواز کرد و تصاویر عمودی را با استفاده از دوربین Sony A5100 با لنز ثابت با فاصله کانونی 19 میلی متر در 25 جولای 2017 ثبت کرد [ 17 ].
در ماههای پس از زلزله بزرگ، تعدادی پرواز به منظور جمعآوری دادهها برای نظارت بر روند بازیابی روستا انجام شد. به این معنا که، فعالیتهای تخریب، استراتژیهای جدیدی را برای یک روش خودکار برای پایش چند زمانی و نقشهبرداری تغییرات ساختمان، بر اساس فیلمهای ویدئویی UAS میخواهند. بهطور دقیقتر، فرآیند تخریب آغاز شد، که نیازمند استراتژیهای جدیدی برای توسعه یک روش کاملاً خودکار برای نظارت چندزمانی و نقشهبرداری تغییرات رخ داده، بر اساس فیلمهای ویدیویی UAS است. برای این منظور، یکی از پروازها در فوریه 2019 انجام شد. ماموریت پرواز شامل برنامه ریزی و تهیه فیلم ویدئویی بود که منطقه مانیتورینگ را با استفاده از UAS-Phantom 4 Pro-که یک کوادکوپتر کوچک و قابل حمل است (وزن حدود 1) پوشش می داد. . 4 کیلوگرم) و مجهز به یک دوربین فیلمبرداری سفارشی 4K است که دارای سنسور CMOS 1 اینچی، میدان دید 84 درجه، تصاویر 24 مگاپیکسلی و فاصله کانونی معادل فرمت 35 میلی متری است. برنامه ریزی پرواز معمولاً در آزمایشگاه با نرم افزار اختصاصی (Litchi Hub) انجام می شود، با دانش منطقه مورد نظر (AOI)، فاصله نمونه زمینی مورد نیاز (GSD) یا ردپای، و پارامترهای ذاتی دیجیتال روی برد شروع می شود. دوربین و هدف اصلی بهره برداری از داده ها. مهمترین پارامترهای پرواز که تصمیمگیری میشوند مستقیماً بر کیفیت دادههای ویدیویی و به همین ترتیب، کیفیت ابرهای نقطهای سه بعدی تولید شده، مدلهای سطح دیجیتال و نقشههای ارتوفتو تأثیر میگذارند. به صورت تحلیلی تر: برنامه ریزی پرواز معمولاً در آزمایشگاه با نرم افزار اختصاصی (Litchi Hub) انجام می شود، با دانش منطقه مورد نظر (AOI)، فاصله نمونه زمینی مورد نیاز (GSD) یا ردپای، و پارامترهای ذاتی دیجیتال روی برد شروع می شود. دوربین و هدف اصلی بهره برداری از داده ها. مهمترین پارامترهای پرواز که تصمیمگیری میشوند مستقیماً بر کیفیت دادههای ویدیویی و به همین ترتیب، کیفیت ابرهای نقطهای سه بعدی تولید شده، مدلهای سطح دیجیتال و نقشههای ارتوفتو تأثیر میگذارند. به صورت تحلیلی تر: برنامه ریزی پرواز معمولاً در آزمایشگاه با نرم افزار اختصاصی (Litchi Hub) انجام می شود، با دانش منطقه مورد نظر (AOI)، فاصله نمونه زمینی مورد نیاز (GSD) یا ردپای، و پارامترهای ذاتی دیجیتال روی برد شروع می شود. دوربین و هدف اصلی بهره برداری از داده ها. مهمترین پارامترهای پرواز که تصمیمگیری میشوند مستقیماً بر کیفیت دادههای ویدیویی و به همین ترتیب، کیفیت ابرهای نقطهای سه بعدی تولید شده، مدلهای سطح دیجیتال و نقشههای ارتوفتو تأثیر میگذارند. به صورت تحلیلی تر: و پارامترهای ذاتی دوربین دیجیتال روی برد و هدف اصلی بهره برداری از داده ها. مهمترین پارامترهای پرواز که تصمیمگیری میشوند مستقیماً بر کیفیت دادههای ویدیویی و به همین ترتیب، کیفیت ابرهای نقطهای سه بعدی تولید شده، مدلهای سطح دیجیتال و نقشههای ارتوفتو تأثیر میگذارند. به صورت تحلیلی تر: و پارامترهای ذاتی دوربین دیجیتال روی برد و هدف اصلی بهره برداری از داده ها. مهمترین پارامترهای پروازی که تصمیمگیری میشوند مستقیماً بر کیفیت دادههای ویدیویی و به همین ترتیب، کیفیت ابرهای نقطهای سه بعدی تولید شده، مدلهای سطح دیجیتال و نقشههای ارتوفتو تأثیر میگذارند. به صورت تحلیلی تر:
-
ارتفاع پرواز: به طور مستقیم به GSD فریم های ویدئویی مربوط می شود. پس از چندین پرواز در ارتفاعات مختلف، از 30 متر تا 100 متر، تصمیم گرفته شد که ارتفاع 80 متر مناسب ترین برای مطالعه خاص است و GSD تقریباً 3 سانتی متر بر پیکسل محاسبه شد.
-
سرعت پرواز: به طور مستقیم بر کیفیت ویدیو تأثیر می گذارد زیرا در صورت بالا بودن فریم های ویدیویی باعث تار شدن آن می شود و از طرف دیگر در صورت کند بودن بیش از حد به زمان پرواز و انرژی باتری بیشتری نیاز دارد. پس از چندین پرواز آزمایشی، تصمیم گرفته شد که کارآمدترین سرعت پرواز برای گرفتن فیلم ویدئویی 25 کیلومتر در ساعت باشد.
-
مسیر پرواز: به طور مستقیم بر ظاهر ساختمان در فیلم ویدیویی تأثیر می گذارد و همپوشانی جانبی فریم های مشتق شده را کنترل می کند. این دو پارامتر برای کیفیت و چگالی ابرهای نقطه سه بعدی، به ویژه برای نقاطی که نمای ساختمان ها را نشان می دهند، بسیار مهم هستند. برای دستیابی به اهداف تحقیقاتی خاص، با استفاده از نرم افزار Litchi Mission Hub، طرح پروازی با در نظر گرفتن شکل بلوک های ساختمانی با دنبال کردن مسیرهای پروازی موازی با خیابان ها و با فاصله 50 متری از بین آنها طراحی شد و 80 درصد ضلع را فراهم کرد. همپوشانی، همانطور که در شکل 3 نشان داده شده است.
2.2. روش شناسی
روش تحقیق حاضر شامل سه مرحله است: (1) پردازش فیلم ویدئویی و مدل سازی سه بعدی. (ii) توسعه پایگاه جغرافیایی ساختمانهای Vrisa. (iii) نقشه برداری از ساختمان های تخریب شده با استفاده از دو الگوریتم تشخیص تخریب از طریق بهره برداری از ابرهای نقطه سه بعدی و DSM در دوره های مختلف (2019/03/02 و 2017/07/25). توالی روش در شکل 4 نشان داده شده است.
2.2.1. ثبت نام جغرافیایی
ثبت جغرافیایی یک مرحله بسیار مهم به منظور ارائه جهت گیری مطلق و اختصاص مقیاس مناسب به تصاویر با وضوح بالا هوایی و ابر نقطه سه بعدی است. بنابراین، لازم بود تعداد کافی از GCPهای اندازه گیری شده در سیستم مرجع یونانی GRS-87 با استفاده از تکنیک RTK اضافه شود. دقت ارتفتو و DSM تولید شده، همانطور که در جدول 1 نشان داده شده است، مقادیر کل خطای RMS را نشان می دهد. به طور خاص، برای ثبت جغرافیایی بررسی UAS در 3 فوریه 2019، 10 GCP با مجموع RMS 2.2 سانتی متر استفاده شد. مکان های GCP و برآورد خطا در شکل 5 نشان داده شده استو از دقت ثبت جغرافیایی به دست آمده، می توانیم نتیجه بگیریم که دقت اطلاعات جغرافیایی تولید شده از دقت رضایت بخشی برای نظارت و نقشه برداری سه بعدی برخوردار است.
2.2.2. پردازش فیلم برای مدل سازی سه بعدی
هدف پردازش فیلم ویدئویی تولید یک مدل سه بعدی دقیق از شهرک Vrisa تقریبا 1.5 سال پس از زلزله مخرب است. خط لوله پردازش شامل مراحل زیر است:
-
استخراج فریم ویدئو – VFE فرآیند ساده ای نیست زیرا فریم هایی که استخراج می شوند باید پیش نیازهای پردازش بیشتر را برآورده کنند که منجر به تولید ابرهای نقطه سه بعدی دقیق و مدل های سطح دیجیتال می شود. به همین دلیل، رویکرد انتخاب فریم عاقلانه (WFS) به کار گرفته شده است که به رویکردی دقیق اشاره دارد که اثرات تاری حرکت و افزونگی فریم را کاهش میدهد، با هدف دور انداختن اضافیترین موارد (یعنی بیش از 80 درصد همپوشانی جلو). و فریم های با کیفیت پایین (یعنی شاخص کیفیت تصویر (IQI) کمتر از 0.5 فریم).
-
الگوریتمهای Structure from Motion (SfM) [ 40 ] و Multi View Stereo (MVS) [ 41 ] محبوبترین رویکرد برای ایجاد ابرهای نقطهای سهبعدی و مدلهای سطح دیجیتال از مجموعهای از تصاویر دوبعدی بهدستآمده توسط UAS هستند. این رویکرد در دهه اخیر به طور گسترده در نقشه برداری سه بعدی در مقیاس های مختلف پیاده سازی شده است و در برخی از بسته های نرم افزاری تجاری و رایگان در انواع مختلف به کار گرفته شده است.
2.2.3. نقشه برداری از ساختمان های تخریب شده
نقشه برداری ساختمان های تخریب شده با استفاده از (i) ابرهای نقطه سه بعدی و (ii) DSM حاصل از تصاویر و فیلم های ویدئویی با وضوح بالا UAS با استفاده از دو مرحله پردازش موازی زیر انجام شده است:
-
ابرهای نقطه سهبعدی هر ساختمان را از مجموعه دادههای ۲۵ جولای ۲۰۱۷ و ۳ فوریه ۲۰۱۹ با استفاده از چند ضلعیهای ساختمانی به دست آمده از تفسیر نوری نقشه عکسهای 25 جولای 2017 استخراج کنید.
-
مقادیر DSM هر ساختمان را از مجموعه دادههای ۲۵ جولای ۲۰۱۷ و ۳ فوریه ۲۰۱۹ با استفاده از چند ضلعیهای ساختمانی به دست آمده از تفسیر نوری ارتوپتومپ ۲۵ جولای ۲۰۱۷ استخراج کنید.
-
استفاده از الگوریتم های تشخیص تخریب در مجموعه داده های فوق برای هر ساختمان و ارزیابی نتایج توسط داده های میدانی. به طور تحلیلی تر، دو الگوریتم تشخیص تخریب توسعه داده شده است، اولی برای نقشه برداری ساختمان های تخریب شده با مقایسه ابرهای نقطه سه بعدی در دوره های مختلف در حالی که الگوریتم دوم با مقایسه DSM ها در دوره های مختلف.
روش اصلی برای استخراج ساختمان از ابرهای نقطه ای، فیلتر کردن برای جداسازی زمین از نقاط غیرزمینی است که توسط یک الگوریتم تقسیم بندی برای تشخیص اشیاء ساختمانی دنبال می شود [ 42 ].]. با این حال، در مطالعه مانیتورینگ حاضر، اشیاء ساختمان از قبل با تفسیر نقشه ارتوفتو 25/07/2017 شناخته شده و نقشهبرداری شدهاند، بنابراین وظیفه اصلی شناسایی تغییر سه بعدی در این چند ضلعیهای ساختمانی خاص در طول یک دوره زمانی بود. یکی از روشهای کاربردی، مقایسه ابرهای نقطهای تقسیمبندی شده به منظور شناسایی ساختمانهایی بود که تخریب شدهاند و زبالههای آنها منتقل شدهاند. این مقایسه بر اساس آمار ابر نقطه ای و به طور خاص بر روی مقادیر میانگین ارتفاع آنها بود. با محاسبه تفاوت معیارهای فوق برای ابرهای نقطه، هر ساختمان به عنوان تخریب شده یا غیر تخریب طبقه بندی شد. این تفاوت ها با آستانه های مختلف (یعنی 0.5 متر، 1 متر، 1.5 متر، 2 متر، 2.5 متر، 3 متر، 3.5 متر) برای طبقه بندی آنها مقایسه شد. برای هر آستانه، ماتریس سردرگمی طبقه بندی، دقت،43 ] محاسبه شد.
علاوه بر این، DSM ها همچنین برای طبقه بندی ساختمان های تخریب شده بر اساس دو DSM (یعنی T1 (ژوئیه 2017) و T2 (فوریه 2019)) استفاده شدند. ما از 30 معیار آماری برای تفاوت ریاضی بین دو DSM به منظور تغذیه الگوریتم استفاده کردیم. به عبارت دیگر، برای هر چند ضلعی ساختمان ما 30 اندازه گیری عددی تولید کردیم که بیشتر آنها با تفاوت سلولی بین دوره های T1 و T2 به سلول مربوط می شد. مجموعه داده چند متغیره فضایی که ما به دست آوردیم، یک رویکرد کارآمد برای شناسایی مناسب ترین متغیر به همراه آستانه های برش آن می خواهد تا چند ضلعی های ساختمان را به دو کلاس طبقه بندی کنیم. 2: غیر تخریب شده. نیاز به یک روش طبقه بندی باینری بدون نظارت وجود دارد که بتواند داده های چند متغیره را مدیریت کند.
پارتیشن بندی بازگشتی یک رویکرد طبقه بندی به خوبی تثبیت شده است که جایگزین مفیدی برای روش های پارامتری [ 44 ، 45 ، 46 ] ارائه می کند.]. این روش بر فرضیات مربوط به وابستگی متغیر وابسته به پیش بینی کننده ها متکی نیست. این یک روش ناپارامتریک برای طبقه بندی بر اساس ساختارهای درختی و استخراج قوانین است. نتایج چنین روشی شامل قوانین مبتنی بر آستانه هایی است که برای طبقه بندی یک مورد باید رعایت شود. ساختار درختی شامل گره هایی است که زیر گروه های ریاضی نمونه یادگیری را با گره های پایانی تشکیل می دهند که نمی توانند بیشتر تقسیم شوند. این روش پارتیشن بندی شامل یک گزینه هرس است که یک درخت فرعی از درخت اشباع را مشخص می کند که بیشترین “پیش بینی” نتیجه را دارد و کمترین آسیب پذیری را در برابر نویز داده های چند متغیره دارد.
3. نتایج و بحث
3.1. نقشه ارتوفتو 3 فوریه 2019
نقشه ارتوفتو تولید شده با استفاده از الگوریتم های SfM و MVS شامل 578 فریم است که توسط فیلم ویدئویی 4K بدست آمده در 03/02/2019 به دست آمده است. مدت زمان کلی فیلم ~34 دقیقه بود و 600 فریم (هر 3 ثانیه یک فریم) استخراج شد و در نهایت 578 فریم برای پردازش انتخاب شد که الزامات مدل سازی سه بعدی را برآورده می کرد. اندازه نقشه 25556 × 19160 پیکسل بود که دارای وضوح فضایی 2.98 سانتی متر بر پیکسل بود و در نتیجه مساحت 0.281 کیلومتر مربع را پوشش می داد .با استفاده از سیستم مختصات GGRS87/Greek Grid (EPSG:2100). این نقشه روستای سنتی وریسا، تقریباً 20 ماه پس از زلزله ویرانگر، در مقیاس نقشه برداری 1:100، به وضوح تغییرات رخ داده در روستا در مرحله احیا را نشان می دهد. یک تفسیر بصری و مقایسه با نقشه ارتوفتو 25 جولای 2017 نشان می دهد که: (1) تعداد زیادی از ساختمان ها تخریب شده اند و به طور چشمگیری تصویر روستا را تغییر داده اند. (ii) حجم زباله های ساختمان ها یا دیوارهای فروریخته برداشته شده است. (iii) برخی از ساختمان های آسیب دیده رها شده بیشتر فرو ریختند، همانطور که در شکل 6 نشان داده شده است.
3.2. 3D Point Cloud از 3 فوریه 2019
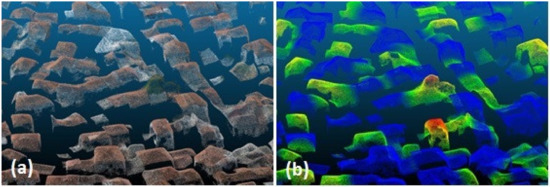
ابر نقطه سه بعدی 2019/03/02 از 30,840,291 نقطه برای کل منطقه مورد مطالعه تشکیل شده است. تفسیر بصری و مقایسه با ابر نقطه سه بعدی 25 جولای 2017 نشان می دهد که تعداد زیادی از ساختمان ها تخریب شده اند. همانطور که در شکل 7 a,b نشان داده شده است، با ترکیب بصری دو ابر نقطه، ابرهای نقطهای ساختمانهای آسیبدیده از قدیمیترین مجموعه داده در بالای ابرهای نقطهای جدیدترین مجموعه ظاهر میشوند .
تجزیه و تحلیل تشخیص تغییر با استفاده از دادههای UAS یک فرآیند سخت است زیرا ابرهای نقطه سه بعدی تولید شده با اعمال الگوریتم SfM بر روی تصاویر به دست آمده در دورههای زمانی مختلف و/یا توسط حسگرهای UAS مختلف باید قابل مقایسه باشند. در تشخیص تغییر سه بعدی، هم ابرهای نقطه فرآیند قبل و هم پس از تخریب مورد نیاز است، و تغییرات جفتی ناشی از مقایسه قبل از پس از تخریب به تخریب آنها نسبت داده می شود. برای مقاصد مقایسه، از دادههای جانبی برای بلوکهای روستا استفاده شد، که از قبل در دسترس بود یا به راحتی با تفسیر دستی نقشههای ارتوفتو استخراج میشد تا با دور انداختن بخشهای غیرضروری صحنه (جادهها، زمین، درختان و غیره) دقت مقایسه را بیشتر بهبود بخشد. ).
مقایسه ابر با ابر برای توصیف تفاوت ارتفاع بین ساختمانهایی که پس از اولین پرواز به دلیل فعالیتهای پس از لرزهای تخریب یا فروریختند، انجام شد. تفاوت بین ابرهای دو نقطه ای با استفاده از بهترین صفحه برازش حداقل مربعی که نزدیکترین نقطه و همسایگان آن را محاسبه می کند، اندازه گیری می شود. به عنوان یک ابر مرجع، جدیدترین (03/02/2019) ابر نقطه انتخاب شد و ابر نقطه ایجاد شده از داده های به دست آمده در 25/07/2017، ابر نقطه ای بود که فاصله ها بر روی آن محاسبه می شود. برای مقایسه ابر به ابر، برنامه منبع باز CloudCompare برای محاسبه فواصل هر نقطه نسبت به نقاط ابر مرجع [ 47 ] استفاده شد.]. جدیدترین ابر نقطه به دلیل تراکم نقطه بالاتر انتخاب شد. نتایج نشان داد که اختلاف ارتفاع بین ابرهای دو نقطه ای بین 3.33- و 10.28 متر تغییر می کند. در شکل 8 ، فاصله مطلق در محور z برای مساحت کل سهام ساختمان نشان داده شده است. میانگین و انحراف معیار فاصله ابر تا نقطه ابر محاسبه شده به ترتیب 0.57 متر و 1.40 متر بود.
مقادیر مثبت از یک کمپین حقیقت زمین که با دقت بالا، سهام ساختمان تخریب شده و تصادفی بودن آن در تغییرات شبح ساختمان را به تصویر میکشد، تأیید شد. مقادیر منفی، به ویژه مقادیر کمتر از 0.50 متر، فواصل اشتباه محاسبه شده مرتبط با پوشش گیاهی و سایه بودند. به طور دقیق تر، بالاترین مقدار منفی مربوط به خانه تخریب شده ای است که در حالت پس از تخریب، درختی نزدیک سقف آن بود، همانطور که در شکل 9 نشان داده شده است.
اثر سایه در ناحیه اطراف سقفها میتواند باعث ایجاد نوسانات موضعی در اختلاف ارتفاع بین ابرهای دو نقطهای شود. بنابراین، یک روش مطمئن برای جداسازی نقاط انبار ساختمان از تمام کلاسهای نقطه دیگر برای مقایسه دقیق نقطه به نقطه بسیار مهم است. واریانس کوچک در اختلاف ارتفاع مطلق بین ابرهای دو نقطه ای منجر به این نتیجه می شود که پروازهای بررسی مختلف با استفاده از حسگرهای فصلی و UAS می توانند نتایج قابل مقایسه ای تولید کنند. علاوه بر این، مقایسه ابر به ابر بین دو مجموعه داده اکتسابی هوایی مختلف میتواند نتایج آشکارسازی تغییر قوی در شناسایی آسیب ساختار انسانی ایجاد کند.
3.3. نقشه تفاوت DSM بین 3 فوریه 2019 و 25 ژوئیه 2017
در مطالعه حاضر، یک DSM با وضوح بالا (11 سانتی متر) ایجاد شده است که ارتفاعات روستای سنتی وریسا را تقریبا 20 ماه پس از زلزله نشان می دهد. با کم کردن این DSM از DSM 25 جولای 2017، یک نقشه تفاوت DSM ایجاد شد که فرورفتگی مقادیر ارتفاع (رنگ های آبی روی نقشه) ساختمان های تخریب شده را نشان می دهد. نقشه تفاوت DSM، همانطور که در شکل 10 نشان داده شده است، دارای پنج کلاس برای مقادیر منفی ارتفاعات است که به مناطقی اشاره دارد که ارتفاع سطح را به دلیل فرآیند تخریب از دست داده اند. به طور تحلیلی تر، کلاس نقشه از 1.5- تا 6- متر مربوط به ساختمان های یک طبقه است، در حالی که کلاس نقشه از 6- متر تا 9- متر به ساختمان های دو طبقه و در نهایت، کلاس نقشه مربوط می شود. <-9 متر به ساختمان های سه طبقه اشاره دارد.
3.4. الگوریتم تشخیص تخریب با 3D Point Cloud
شکل 11 دقت، حساسیت و ویژگی را برای آستانه های مختلف اختلاف بین ارتفاعات میانگین دو ابر نقطه نشان می دهد. با توجه به نتایج، تفاوت مقادیر میانگین ارتفاع بین دو ابر نقطه میتواند ساختمانهای تخریبشده، همانطور که در شکل A1 – مورد 1 نشان داده شده است، از ساختمانهای غیر تخریب شده، همانطور که در شکل A1 – مورد 2 نشان داده شده است ، با دقت 97.8٪ شناسایی کند. هنگامی که یک آستانه 1.5 متری برای این تفاوت ها اعمال می شود، همانطور که در جدول A1 نشان داده شده است. این آستانه به دلیل عملکرد بهتر آن در طبقه بندی ساختمان های تخریب شده انتخاب شد. با این حال، 24 ساختمان به دلایل مختلف به اشتباه طبقه بندی شده اند. هشت ساختمان تخریب شده به عنوان تخریب نشده طبقه بندی شدند. یکی از آنها در یک بسته قرار داشت که در آن یک ساختمان جدید در حال ساخت بود. بنابراین، همانطور که در شکل A1 – مورد 3 نشان داده شده است، بین ارتفاعات تفاوت معنی داری وجود نداشت . بقیه ساختمان ها به طور کامل در اثر زلزله فروریختند و ارتفاع آوار کمتر از 1.5 متر بود، از این رو آنها را به اشتباه طبقه بندی کردند، همانطور که در شکل A1 – مورد 4 نشان داده شده است. از سوی دیگر 16 ساختمان فروریخته در رده بندی قرار گرفتند. همانطور که در شکل A1 نشان داده شده است، اکثر آنها به دلیل فروپاشی جزئی بین دو تاریخ اکتساب به اشتباه طبقه بندی شدند .- مورد 5. علاوه بر این، برخی از ساختمان ها به دلیل تعداد متفاوت نقاط ابر بین دو تاریخ، به اشتباه طبقه بندی شدند. در این موارد، در دوره T1، تنها سقف و نما به دلیل ساختمانهای محله قابل مشاهده بود. در دوره T2، یک یا چند ساختمان محله تخریب شد و سپس دیوارهای جانبی قابل مشاهده بود که منجر به مقادیر میانگین ارتفاع کمتر شد. در نهایت، یک ساختمان به دلیل پوشش درخت برگریز (چنار) که پشت بام را در طول تاریخ خرید تابستانی می پوشاند، به اشتباه طبقه بندی شد، همانطور که در شکل A1 – مورد 6 نشان داده شده است.
3.5. الگوریتم تشخیص تخریب از DSM ها
با استفاده از زبان برنامه نویسی R [ 48 ] و استفاده از کتابخانه های یادگیری ماشین مربوطه [ 44 ]، ما پارتیشن بندی بازگشتی را بر روی مجموعه داده چند متغیره انجام دادیم. نتیجه این رویکرد یک ساختار درختی پارتیشن است که در شکل 12 نشان داده شده است .
با توجه به درخت به دست آمده، تنها مهم ترین متغیر برای طبقه بندی مجموعه داده چند متغیره به دو کلاس، میانه تفاوت بین T1 و T2 است. آستانه برای این متغیر، که برای دقیقترین دوگانگی مجموعه داده چند متغیره در دو کلاس استفاده میشود – 0.37 متر است. ماتریس سردرگمی نشان داد که بیشتر چند ضلعی های ساختمان به طور دقیق طبقه بندی شده اند. به طور دقیق تر، از مجموع 1079 مورد، 12 ساختمان به اشتباه به عنوان تخریب شده با رویکرد پارتیشن بندی بازگشتی و دو ساختمان به اشتباه به عنوان تخریب نشده طبقه بندی شده اند. دقت کلی فرآیند طبقه بندی 97 درصد و کاپا 93 درصد است در حالی که حساسیت و ویژگی به ترتیب 0.99 و 0.92 است.
بر اساس دانش آماری بهدستآمده از مجموعه دادههای چند متغیره این منطقه جغرافیایی، سازههای ساختمانی با اختلاف میانه کمتر از -0.37 متر احتمال ریزش 97٪ دارند. شایان ذکر است دوازده ساختمانی که به اشتباه با روش پارتیشن بندی بازگشتی تخریب شده اند، ساختمان های ایستاده ای هستند که به دلیل جزئی بودن سقف ها (سقف های فروریخته و بخشی از دیوارهایشان) حدود 2 تا 3 متر ارتفاع از بالای سقف خود را از دست داده اند. فرو ریختن، همانطور که در شکل A1 نشان داده شده است – case7. همانطور که در شکل A1 نشان داده شده است، این دو به اشتباه به عنوان تخریب نشده طبقه بندی شدند—case8، ساختمانهای یک طبقه (حدود 3 متر ارتفاع) هستند که در اثر زلزله کاملاً فرو ریخته اند و در مدل سطح دیجیتال 25 جولای 2017 ارتفاع 1 تا 2 متر را ارائه می دهند، در حالی که در 3 فوریه 2019، پس از تخریب، آنها اختلاف ارتفاع آنقدر زیاد نبود که به عنوان تخریب شده طبقه بندی شود.
علیرغم این واقعیت که سنجش از دور و اطلاعات جغرافیایی طیف وسیعی از روشهای جمعآوری و پردازش دادهها را ارائه میدهند، هیچ روشی برای شناسایی و نقشهبرداری خودکار یا نیمه خودکار ساختمانهای تخریبشده یک منطقه شهری آسیبدیده از زلزله وجود ندارد. ابر نقطه سه بعدی دقیق و DSM تولید شده توسط پردازش فیلم ویدئویی 4K با وضوح بالا UAS امکان توسعه الگوریتم هایی را برای شناسایی و نقشه برداری سه بعدی ساختمان های تخریب شده، همانطور که در شکل 13 نشان داده شده است ، با دقت تقریباً 97 درصد در مقایسه با نقشه برداری میدانی، می دهد. به طور تحلیلی تر، 240 ساختمان بنایی از مجموع 394 ساختمان آسیب دیده (RED-Buildings) تخریب شده است، همانطور که در جدول 2 نشان داده شده است.. دلیل اصلی طبقه بندی نادرست ساختمان های تخریب شده این است که پس از یک زلزله مخرب، چندین ساختمان کاملاً فرو می ریزند و ارتفاع آنها به طور قابل توجهی کمتر از ساختمان های ایستاده است. مقایسه ارتفاعات پس از تخریب به اندازه کافی متفاوت نیست که بتوان آن را به عنوان ساختمان تخریب شده طبقه بندی کرد.
نتایج بهدستآمده توسط مطالعه حاضر نشان میدهد که الگوریتم DSM نسبت به الگوریتم ابر نقطه سهبعدی، کمتر بهعنوان ساختمانهای تخریبشده/غیر تخریب شده طبقهبندی شده است. بدیهی است که فرمت شطرنجی DSM مزیت نمایش سطح یک بسته یا ساختمان با سطح پیوسته و مقایسه سطح را بر اساس پیکسل به پیکسل فراهم می کند. از سوی دیگر، روش اعمال شده بر روی ابرهای نقطه، بر اساس یک مقایسه آماری واحد برای کل شی، هیچ تغییر جزئی را در هر جسم (یعنی یک ساختمان تا حدی فروریخته) ثبت نمی کند. در نهایت، هر دو روش دقت کلی بالایی را ارائه کردند طبقه بندی ساختمان های تخریب شده بدون هیچ گونه حذف قابل توجه و اشتباه در کمیسیون.
4. نتیجه گیری
داده های مکانی می توانند هر دو ارزیابی خسارت ناشی از زلزله را پشتیبانی کنند [ 49] و پایش مرحله بهبودی. مطالعه حاضر بر بهرهبرداری از فیلمهای ویدئویی UAS 4K برای نظارت و نقشهبرداری سهبعدی تغییراتی که در فرآیند تخریب یک روستای سنتی به شدت آسیبدیده رخ داده است، متمرکز بود. نتایج ثابت کرد که فیلمهای ویدیویی 4K که توسط پرواز در ارتفاع پایین یک پهپاد کوچک بر فراز یک منطقه تخریب شده به دست میآید، روشی بسیار ایمن، سریع، کمهزینه و کارآمد برای گرفتن اطلاعات نوری با وضوح بالا است که میتواند فضایی دوبعدی و سهبعدی دقیقی را ارائه کند. مجموعههای داده مانند نقشه ارتوفتو، DSM و ابر نقطه سه بعدی. این مجموعه دادهها، از نظر الگوریتمی با نمونههای مربوط به کمپینهای پروازی قبلی (چند روز پس از زلزله مخرب) مقایسه شدهاند، به اندازه کافی کارآمد هستند تا به طور خودکار ساختمانهای تخریب شده را در بین این تاریخها شناسایی و نقشهبرداری کنند.
با ارزیابی نتایج بهدستآمده با دادههای حقیقت زمین، میتوان نتیجه گرفت که فرآیند تخریب در مرحله بازیابی پس از زلزله را میتوان با بهرهگیری از روشهای اطلاعات جغرافیایی، پایش و بهطور دقیق سهبعدی نقشهبرداری کرد. علاوه بر این، پروازهای UAS که در تاریخ خرید و پارامترهای پرواز متفاوت هستند، میتوانند ابرهای نقطهای قابل مقایسه برای تشخیص تغییر و شناسایی تخریب در پایش فاز بازیابی تولید کنند. این نتایج نشان میدهد که روش پیشنهادی میتواند به مدیریت پس از زلزله و نظارت بر فرآیندهای بازسازی کمک کند، زیرا چنین اطلاعات مکانی دقیق دوبعدی و سه بعدی میتواند به همه ذینفعان و سازمانهای ملی و محلی خدمت کند. تحقیقات آینده بر توسعه یک الگوریتم جدید برای محاسبه زباله و نقشه برداری بر اساس همان مجموعه داده ها و به طور خاص تر تمرکز خواهد کرد.
پردازش زباله نقش مهمی در مراحل ابتدایی فرآیند بازیابی ایفا می کند [ 50 ] و به عنوان یک موضوع حیاتی در پاسخ به یک فاجعه که به طور نزدیک با محیط در هم تنیده است ظاهر می شود [ 51 ]. هنگامی که ساختمان های آسیب دیده مدرن و بدون ویژگی های معماری قابل توجه هستند، تخریب و بازسازی ساختمان های جدید استراتژی بهینه است. در مقابل، برای ساختمانهای بنایی میراثی/سنتی، مانند انبار ساختمان Vrisa، یک استراتژی برای بازیابی کامل سهام اولیه پیشنهاد شده است. راه حل بهینه در مورد دوم، تکنیک بازسازی “آناستیلوز” است که از مقدار زیادی از مواد اولیه استفاده می کند [ 52 ].
پیوست اول


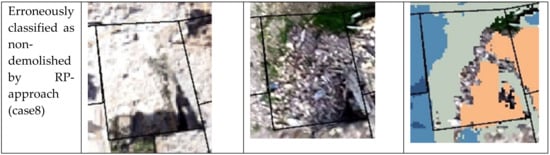
شکل A1. موارد مختلف حذف و اشتباهات کمیسیون.

جدول A1. نتایج ماتریس طبقهبندی و دقت برای ساختمانهای تخریبشده/غیر تخریب شده برای آستانههای مختلف اختلاف بین میانگین ارتفاعات ابرهای دو نقطهای. ستونها آنهایی هستند که مدلسازی شدهاند و ردیفها مقادیر واقعی (تعداد ساختمانها) هستند.
منابع
- جانسون، لس آنجلس؛ اولشانسکی، آر.بی. اولشانسکی، JA پس از بلایای بزرگ: چگونه شش کشور بازیابی جامعه را مدیریت کردند . مؤسسه خط مشی زمین لینکلن: کمبریج، MA، ایالات متحده آمریکا، 2016. [ Google Scholar ]
- الکساندر، دی. اصول برنامه ریزی و مدیریت اضطراری ، ویرایش 6. Dunedin Academic Press Ltd.: Edinburg, UK, 2012; شابک 978-1-903544-10-5. [ Google Scholar ]
- کنترراس، دی. بلاشکه، تی. کینبرگر، اس. زیل، پ. افسانه ها و واقعیت ها در مورد بازیابی لاکویلا پس از زلزله. بین المللی J. کاهش خطر بلایا. 2014 ، 8 ، 125-142. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Ubaura, M. تغییرات در کاربری زمین پس از زلزله بزرگ ژاپن شرقی و مسائل مربوط به شکل شهری. در زلزله و سونامی ژاپن در سال 2011: بازسازی و مرمت: بینش و ارزیابی پس از 5 سال . Santiago-Fandiño, V., Sato, S., Maki, N., Iuchi, K., Eds. انتشارات بین المللی اسپرینگر: چم، سوئیس، 2018; ص 183-203. شابک 978-3-319-58691-5. [ Google Scholar ]
- بانو مورتی، وی. شانکار، جی. رائو، KRM؛ ناگامانی، PV تعریف چارچوبی برای ادغام فناوریهای مکانی برای مدیریت اضطراری. Geocarto Int. 2015 ، 30 ، 963-983. [ Google Scholar ] [ CrossRef ]
- گاتمن، جی. عدالت، سی. شفنر، ای. لاولند، تی. برنامه پوشش زمین و تغییر کاربری زمین ناسا. در علوم تغییر سرزمین. سنجش از دور و پردازش تصویر دیجیتال جلد 6 ; Gutman، G.، Janetos، AC، Justice، CO، Moran، EF، Mustard، JF، Rindfuss، RR، Skole، DL، Turner، BLI، Cochrane، MA، Eds. Springer: Dordrecht، هلند، 2004; ص 17-29. [ Google Scholar ]
- دوی، ا. اوشیدا، ک. تاکاشیما، ی. ساکاکیبارا، ک. Itoh, T. مدلسازی سه بعدی طرح بازسازی در ساحل سانریکو برای زلزله بزرگ ژاپن شرقی: تجسم طرح بازسازی برای به اشتراک گذاری اطلاعات موثر. در مجموعه مقالات نوزدهمین کنفرانس بینالمللی سیستمهای اطلاعات مبتنی بر شبکه (NBiS) در سال 2016، استراوا، جمهوری چک، 7 تا 9 سپتامبر 2016. صص 397-400. [ Google Scholar ]
- زکوس، دی. گرین وود، دبلیو. لینچ، جی. مانوساکیس، جی. آتاناسوپولوس-زکوس، آ. کلارک، ام. Saroglou, C. Lessons Learned from The Application of UAV Enabled Structure-From-Motion Photogrammetry در مهندسی ژئوتکنیک. بین المللی ISSMGE جی. ژئوانگین. تاریخچه پرونده 2018 ، 4 ، 254-274. [ Google Scholar ]
- دومینیسی، دی. آلیکاندرو، م. Massimi، V. فتوگرامتری پهپاد در سناریوی پس از زلزله: مطالعات موردی در L’Aquila. Geomat. نات. خطر خطرات 2017 ، 8 ، 87-103. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بوکاردو، پی. چیابراندو، اف. دوتو، اف. تونلو، اف. Lingua، A. تمرین استقرار پهپاد برای اهداف نقشه برداری: ارزیابی کاربردهای واکنش اضطراری. Sensors 2015 , 15 , 15717–15737. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گومز، سی. پردی، H. پهپاد – فتوگرامتری و ژئومحاسبات مبتنی بر خطرات و پایش خطر بلایا – مروری. Geoenviron. Disasters 2016 ، 3 ، 23. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پروس، ای. بندتی، ال. فلوری، جی. ریزه، م. پولیتی، آی. بیلانت، جی. ون در وورد، جی. Feuillet، N. ژاک، ای. سرعت، ب. بردارهای لغزش زمین لرزه های 24 آگوست و 30 اکتبر 2016 در مرکز ایتالیا: لغزش مایل و پیامدهای حرکتی منطقه ای. تکتونیک 2018 ، 37 ، 3760-3781. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کالانتروپیو، آ. چیابراندو، اف. سامارتانو، جی. اسپانو، آ. Teppati Losè، L. پهپاد اعتبار سنجی و داده های سنجش از راه دور برای ارزیابی آسیب در سناریوهای پس از فاجعه. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، XLII-3/W4 ، 121–128. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یامازاکی، اف. کوبو، ک. طنابه، ر. لیو، دبلیو. ارزیابی خسارت و مدل سازی سه بعدی توسط پروازهای پهپاد پس از زلزله سال 2016 کوماموتو، ژاپن. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2017 (IGARSS)، فورت ورث، تگزاس، ایالات متحده آمریکا، 23 تا 28 ژوئیه 2017؛ صص 3182–3185. [ Google Scholar ]
- چیابراندو، اف. دی لولی، ا. پاتروکو، جی. اسپانو، آ. سامارتانو، جی. Teppati Losè، L. مدل سازی سه بعدی چند زمانی برای اضطراری میراث فرهنگی در طول رویدادهای لرزه ای: ارزیابی آسیب از s. کلیسای آگوستینو در آمتریس (RI). ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، XLII-5/W1 ، 69–76. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زکوس، دی. مانوساکیس، جی. آتاناسوپولوس-زکوس، آ. کلارک، ام. ناپر، ال. ماسی، سی. آرچیبالد، جی. گرین وود، دبلیو. همفیل-هیلی، ام. راثی، ای. و همکاران نقشهبرداری سهبعدی مبتنی بر حرکت از زمینلغزشها و محلهای گسیختگی در طی شناسایی زلزله کایکورا ۲۰۱۶. در مجموعه مقالات یازدهمین کنفرانس ملی ایالات متحده در مورد مهندسی زلزله، یکپارچه سازی علم، مهندسی و سیاست، لس آنجلس، کالیفرنیا، ایالات متحده آمریکا، 25 تا 29 ژوئن 2018. [ Google Scholar ]
- سولاکلیس، ن. تاتاریس، جی. پاپادوپولو، ای. Chatzistamatis، S. واسیلاکوس، سی. کاوروداکیس، دی. روسو، او. Papakonstantinou، A. بهره برداری هم افزایی از روش های اطلاعات جغرافیایی برای نقشه برداری سه بعدی پس از زلزله و ارزیابی خسارت. در سیستم های هوشمند مدیریت بحران ; Altan, O., Chandra, M., Sunar, F., Tanzi, TJ, Eds. یادداشت های سخنرانی در اطلاعات جغرافیایی و نقشه برداری. انتشارات بین المللی Springer: چم، سوئیس، 2019; صص 3-31. شابک 978-3-030-05329-1. [ Google Scholar ]
- واسیلاکوس، سی. Chatzistamatis، S. روسو، او. Soulakellis، N. مقایسه فتوگرامتری زمینی و اسکن لیزری زمینی برای مدیریت پاسخ به زلزله. در سیستم های هوشمند مدیریت بحران ; Altan, O., Chandra, M., Sunar, F., Tanzi, TJ, Eds. یادداشت های سخنرانی در اطلاعات جغرافیایی و نقشه برداری. انتشارات بین المللی Springer: چم، سوئیس، 2019; صص 33-57. شابک 978-3-030-05329-1. [ Google Scholar ]
- پاپاکنستانتینو، ا. دوکاری، م. روسو، او. Drolias، GC; چایداس، ک. مستکاس، ع. آتاناسیس، ن. توپوزلیس، ک. Soulakellis، N. UAS چند دوربین دکل برای آسیب پس از زلزله ژئو تجسم سه بعدی از روستای Vrisa. در مجموعه مقالات ششمین کنفرانس بین المللی سنجش از دور و اطلاعات جغرافیایی محیط زیست (RSCy2018)، پافوس، قبرس، 26 تا 29 مارس 2018. [ Google Scholar ]
- چانگ، کی جی. چان، YC; چن، RF; Hsieh, YC تکامل ژئومورفولوژیکی زمین لغزش ها در نزدیکی یک گسل عادی فعال در شمال تایوان، همانطور که توسط داده های سیستم هواپیمای لایدار و بدون سرنشین نشان داده شده است. نات. سیستم خطرات زمین. علمی 2018 ، 18 ، 709–727. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پترنل، تی. کوملج، ش. اوستیر، ک. Komac، M. نظارت بر زمین لغزش Potoška planina (NW اسلوونی) با استفاده از فتوگرامتری پهپاد و اندازهگیریهای سرعت. زمین لغزش 2017 ، 14 ، 395-406. [ Google Scholar ] [ CrossRef ]
- Franke، KW; Lingwall، BN; زیمارو، پ. کاین، RE; توماسی، پ. چیابراندو، اف. سانتو، الف. رویکرد شناسایی مرحلهای برای مستندسازی زمین لغزشهای پس از زلزلههای 2016 ایتالیا مرکزی. زمین Spectra 2018 ، 34 ، 1693-1719. [ Google Scholar ] [ CrossRef ]
- سانتو، آ. سانتانجلو، ن. فورته، جی. د فالکو، ام. بررسی سیل پس از سیل: رویداد 14 و 15 اکتبر 2015 در منطقه پائوپیسی-سولوپاکا (جنوب ایتالیا). J. Maps 2016 ، 13 ، 19-25. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کواریچ، ام. کروگل، ک. Wischounig-Strucl، D.; باتاچاریا، اس. شاه، م. Rinner, B. پهپادهای تحت شبکه به عنوان شبکه حسگر هوایی برای کاربردهای مدیریت بلایا. ei Elektrotechnik und Informationstechnik 2010 ، 127 ، 56-63. [ Google Scholar ] [ CrossRef ]
- کنترراس، دی. بلاشکه، تی. تاید، دی. Jilge، M. نظارت بر بازیابی پس از زلزله از طریق ادغام سنجش از دور، GIS و مشاهدات زمینی: مورد لاکویلا (ایتالیا). کارتوگر. Geogr. Inf. علمی 2016 ، 43 ، 115-133. [ Google Scholar ] [ CrossRef ]
- جیوردان، دی. هایاکاوا، YS؛ نکس، اف. Tarolli، P. مقدمه: استفاده از سیستم های هواپیمای خلبانی از راه دور (RPAS) در نظارت بر کاربردها و مدیریت مخاطرات طبیعی. نات. سیستم خطرات زمین. علمی 2018 ، 18 ، 3085–3087. [ Google Scholar ] [ CrossRef ]
- هاشمی پرست، س. یامازاکی، اف. لیو، دبلیو. پایش و ارزیابی روند بازسازی شهری بم، ایران، پس از زلزله 6.6 Mw 2003. نات. خطرات 2017 ، 85 ، 197-213. [ Google Scholar ] [ CrossRef ]
- کوین، آر. تیان، جی. Reinartz، P. تشخیص تغییر سه بعدی-رویکردها و کاربردها. ISPRS J. Photogramm. Remote Sens. 2016 ، 122 ، 41-56. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مندرس، آ. ارنر، ا. Sarp, G. تشخیص خودکار ساختمانهای آسیب دیده پس از خطر زلزله با استفاده از سنجش از دور و فناوری اطلاعات. سیاره Procedia Earth. علمی 2015 ، 15 ، 257-262. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تورکر، م. Cetinkaya، B. تشخیص خودکار ساختمان های آسیب دیده زلزله با استفاده از DEM های ایجاد شده از عکس های هوایی استریو قبل و بعد از زلزله. بین المللی J. Remote Sens. 2005 ، 26 ، 823-832. [ Google Scholar ] [ CrossRef ]
- وتریول، ا. گرکه، ام. کرل، ن. Vosselman, G. شناسایی آسیب در ساختمان ها بر اساس شکاف در ابرهای نقطه سه بعدی از تصاویر مورب هوابرد با وضوح بسیار بالا. ISPRS J. Photogramm. Remote Sens. 2015 ، 105 ، 61-78. [ Google Scholar ] [ CrossRef ]
- Kiratzi، A. زلزله 12 ژوئن 2017 Mw 6.3 جزیره Lesvos (دریای اژه): مدل لغزش و جهتیابی با وارونگی گسل محدود برآورد شده است. تکتونوفیزیک 2018 ، 724-725 ، 1-10. [ Google Scholar ] [ CrossRef ]
- پاپادیمیتریو، پ. کساراس، آی. کویریس، جی. Tselentis، G.-A.; ولگاریس، ن. Lekkas، E. چولیاراس، گ. اوانجلیدیس، سی. پاولو، ک. کاپتانیدیس، وی. زلزله 12 ژوئن 2017 مگاوات = 6.3 لسبوس از مشاهدات دقیق لرزهشناسی. جی. جئودین. 2018 ، 115 ، 23-42. [ Google Scholar ] [ CrossRef ]
- الکساندر، DE زلزله لاکویلا در 6 آوریل 2009 و سیاست دولت ایتالیا در واکنش به بلایا. جی. نات. منبع. نتیجه سیاست 2010 ، 2 ، 325-342. [ Google Scholar ] [ CrossRef ]
- کنترراس، دی. فورینو، جی. Blaschke, T. اندازه گیری پیشرفت فرآیند بهبود پس از زلزله: مورد لاکویلا، ایتالیا. بین المللی J. کاهش خطر بلایا. 2018 ، 28 ، 450-464. [ Google Scholar ] [ CrossRef ]
- ماورولیس، س. آندریاداکیس، ای. اسپیرو، NI; آنتونیو، وی. اسکورتسوس، ای. پاپادیمیتریو، پ. کاساراس، آی. کویریس، جی. Tselentis، GA; ولگاریس، ن. و همکاران ارزیابی آسیب ساختمان ناشی از زلزله سریع مبتنی بر پهپاد و GIS برای ترسیم نقشه ایزو لرزه EMS-98: زلزله 12 ژوئن 2017 مگاوات 6.3 لسبوس (شمال دریای اژه، یونان). بین المللی J. کاهش خطر بلایا. 2019 ، 37 ، 20. [ Google Scholar ] [ CrossRef ]
- Chatzistamatis، S. کالایتزیس، پ. چایداس، ک. Chatzitheodorou، C. پاپادوپولو، EE; تاتاریس، جی. Soulakellis، N. ترکیب دادههای فتوگرامتری TLS و UAV برای مدلسازی سهبعدی پس از زلزله یک کلیسای میراث فرهنگی. در مجموعه مقالات بین المللی. قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2018 ، XLII-3/W4 ، 143–150. [ Google Scholar ]
- سولاکلیس، NA; نواک، شناسه; زوروس، ن. لومن، پی. Yates, J. Fusing Landsat-5/TM و نقشه های برجسته سایه دار در نقشه برداری زمین ساختی و ژئومورفیک: جزیره Lesvos، یونان. فتوگرام مهندس Remote Sens. 2006 ، 72 ، 693-700. [ Google Scholar ] [ CrossRef ]
- ارزیابی آسیب پس از زلزله و قابلیت استفاده ساختمان ها: توسعه بیشتر و کاربردها. گزارش نهایی. کمیسیون اروپا-DG Environment, Civil Protection-EPPO. در دسترس آنلاین: https://ec.europa.eu/echo/files/civil_protection/civil/act_prog_rep/peadab.pdf (دسترسی در 10 ژوئن 2020).
- وستوبی، ام جی. براسینگتون، جی. گلسر، NF; هامبری، ام جی; رینولدز، JM فتوگرامتری “ساختار از حرکت”: ابزاری کم هزینه و موثر برای کاربردهای علوم زمین. ژئومورفولوژی 2012 ، 179 ، 300-314. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فوروکاوا، ی. Ponce، J. استریوپسیس دقیق، متراکم و قوی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2010 ، 32 ، 1362-1376. [ Google Scholar ] [ CrossRef ]
- رامیه، AM; ندامانوری، RR; Krishnan، R. روش تشخیص ساختمان مبتنی بر تقسیم بندی از ابر نقطه LiDAR. مصر. J. Remote Sens. Sp. علمی 2017 ، 20 ، 71-77. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوهن، جی. ضریب توافق برای مقیاس های اسمی. آموزش. روانی Meas. 1960 ، 20 SRC ، 37-46. [ Google Scholar ] [ CrossRef ]
- ترنو، TM; Elizabeth, JA مقدمه ای بر پارتیشن بندی بازگشتی با استفاده از روال های RPART . بنیاد اتکینسون مایو: روچستر، MN، ایالات متحده آمریکا، 2018. [ Google Scholar ]
- زیلیس، ع. هاثورن، تی. Hornik، K. پارتیشن بندی بازگشتی مبتنی بر مدل. جی. کامپیوتر. نمودار. آمار 2008 ، 17 ، 492-514. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، اچ. Singer, BH Recursive Partitioning and Applications ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2010. [ Google Scholar ]
- CloudCompare (نسخه 2.X) [نرم افزار GPL]. در دسترس آنلاین: https://www.cloudcompare.org/ (دسترسی در 10 ژوئن 2020).
- Hornik، K. شبکه آرشیو جامع R. وایلی اینتردیسیپ. ریور کامپیوتر. آمار 2012 ، 4 ، 394-398. [ Google Scholar ] [ CrossRef ]
- میانو، ا. جلایر، اف. فورته، جی. سانتو، ا. در مجموعه مقالات هفتمین کنفرانس بین المللی روش های محاسباتی در دینامیک سازه ها و روش های مهندسی زلزله در دینامیک سازه ها و مهندسی زلزله، کرت، یونان، 24 تا 26 ژوئن 2019. [ Google Scholar ]
- نورتون، TR درسهای آموختهشده در مدیریت زبالههای بلایای زمینلرزه و سونامی بزرگ ژاپن شرقی در سال 2011. در زلزله و سونامی ژاپن در سال 2011: بازسازی و مرمت: بینش و ارزیابی پس از 5 سال . Santiago-Fandiño, V., Sato, S., Maki, N., Iuchi, K., Eds. انتشارات بین المللی اسپرینگر: چم، سوئیس، 2018; صص 67-88. شابک 978-3-319-58691-5. [ Google Scholar ]
- کاروناسنا، جی. Amaratunga، D. ظرفیت سازی برای ساخت و ساز پس از فاجعه و مدیریت ضایعات تخریب. فاجعه قبلی مدیریت بین المللی J. 2016 ، 25 ، 137-153. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فالسچینی، ف. زانینی، م. هوفر، ال. زامپیری، پ. پلگرینو، سی. مدیریت پایدار زباله های تخریب در فرآیندهای بازیابی پس از زلزله: تجربه ایتالیایی. بین المللی J. کاهش خطر بلایا. 2017 ، 24 ، 172-182. [ Google Scholar ] [ CrossRef ]
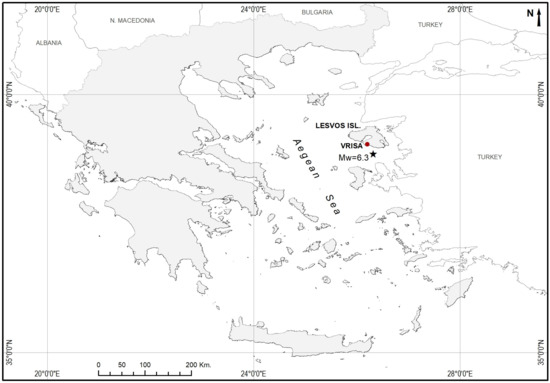
شکل 1. نقشه ساده شده یونان که موقعیت جزیره لسبوس، سکونتگاه سنتی Vrisa و کانون زلزله 12 ژوئن 2017 (Mw 6.3) را نشان می دهد.
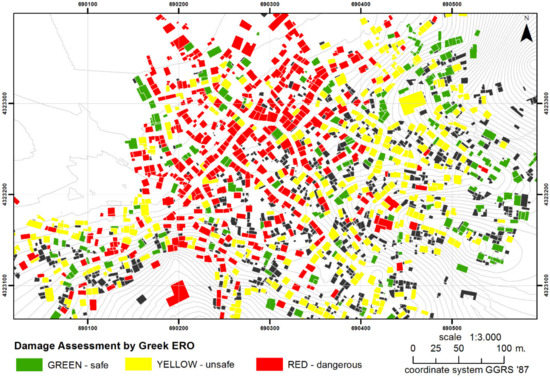
شکل 2. ارزیابی خسارت موجودی ساختمان Vrisa پس از بازرسی نهایی توسط ERO یونان (ساختمان های سیاه رنگ ساختمان های بازرسی نشده را نشان می دهند).
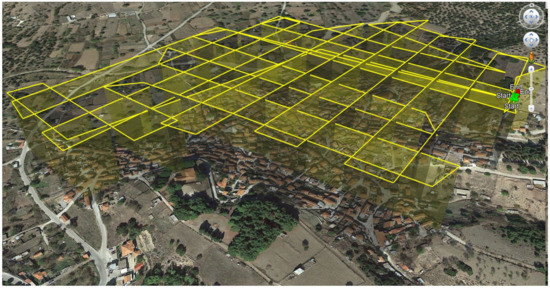
شکل 3. مسیر پرواز طراحی شده برای پوشش منطقه مورد نظر همانطور که در نقشه پایگاه ماهواره ای Google Earth ظاهر می شود.
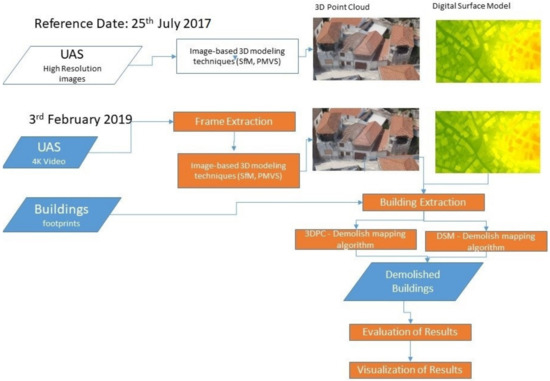
شکل 4. نمودار جریان متدولوژی دنبال شده برای نظارت بر تغییرات سه بعدی و نقشه برداری از روند تخریب در شهرک وریسا پس از زلزله مخرب.
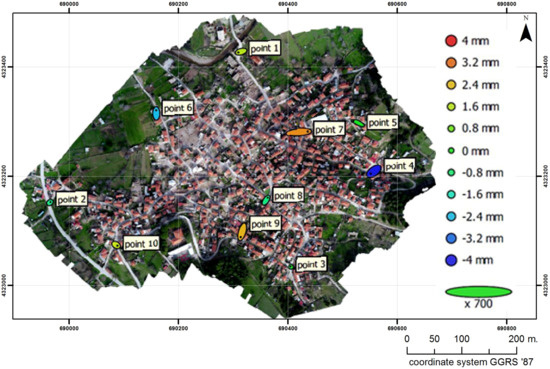
شکل 5. مکان های GCP و برآورد خطا. خطای Z با رنگ بیضی نشان داده می شود. خطاهای X,Y با شکل بیضی نشان داده می شوند. مکانهای GCP تخمینی با یک نقطه مشخص میشوند. (از گزارش نرم افزار Photoscan/Agisoft.)

شکل 6. نقشه اورتوفوتو برتر 3 فوریه 2019 برگرفته از فیلم ویدئویی UAS 4K، ساختمانهای تخریب شده را نشان میدهد که با تفسیر عکس و کار میدانی نقشهبرداری شدهاند. نقشه ارتوفتو پایین 25 جولای 2017، که توسط تصاویر با وضوح بالا UAS به دست آمده است، ساختمان هایی را نشان می دهد که توسط یونان-EPO برای تخریب تایید شده اند.
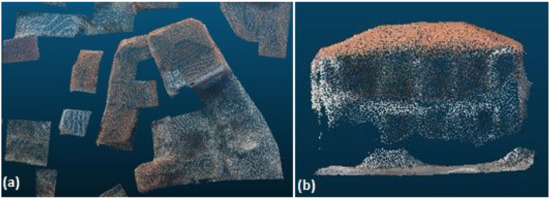
شکل 7. ( الف ) بخشی از ابر نقطه سهبعدی 3 فوریه 2019 برگرفته از فیلم ویدئویی UAS 4K و ( ب ) ترکیبی از دو ابر نقطه: (i) بالای 25 جولای 2017 ساختمان آسیبدیده را نشان میدهد. (ii) پایین 3 فوریه 2019 زمین را پس از تخریب نشان می دهد.
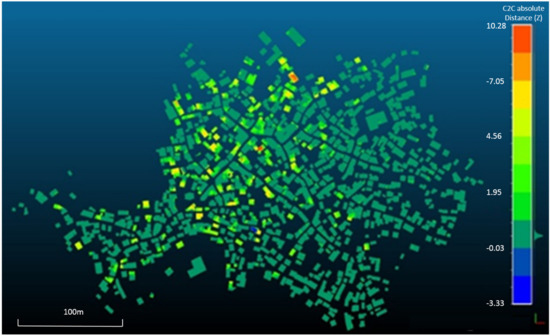
شکل 8. فواصل مطلق در محور z برای مساحت کل سهام ساختمان. رنگ های گرم ساختمان های تخریب شده را به تصویر می کشند.
شکل 9. درختان روی سقف خانه ها منجر به بزرگترین مقادیر منفی و در نتیجه خطا در مقایسه ابر به ابر ( الف ) ابر نقطه منطقه مورد مطالعه و ( ب ) فاصله ابر به ابر می شود.
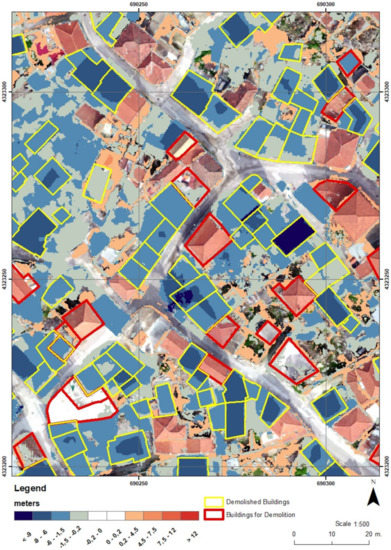
شکل 10. DSM نقشه تفاوت ایجاد شده با تفریق DSM 3 فوریه 2019 با DSM 25 جولای 2017. رنگ های آبی روی نقشه مقادیر منفی ارتفاع را نشان می دهند که به ساختمان های تخریب شده اشاره دارد. سه طبقه نقشه (i) -1.5 متر تا -6 متر، (ii) -6 متر تا -9 متر، و (iii) <-9 متر، به ترتیب به ساختمان های یک، دو و سه طبقه اشاره دارند.
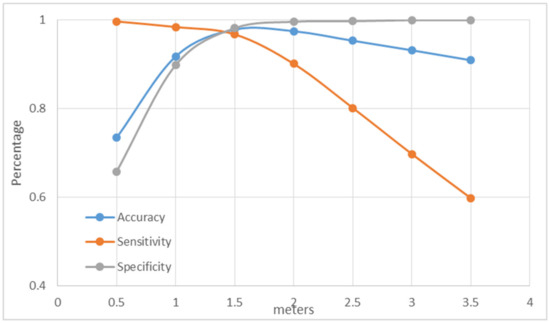
شکل 11. دقت، حساسیت و ویژگی برای آستانه های مختلف – 1.5 متر از میانگین اختلاف ارتفاع بین دو تاریخ اکتساب، بالاترین دقت و ضریب کاپا را ارائه کرد.
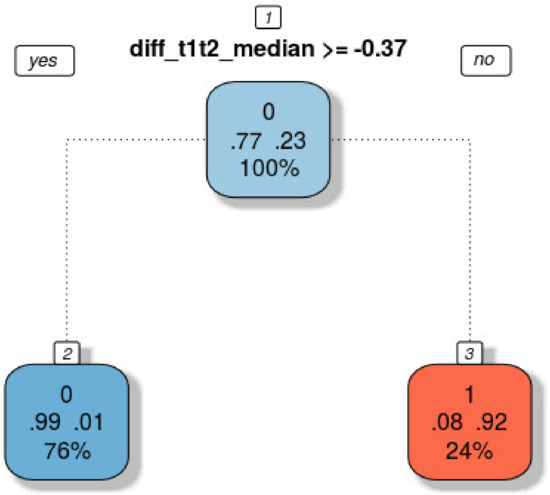
شکل 12. درخت قوانین رویکرد پارتیشن بندی بازگشتی برای طبقه بندی باینری سازه های ساختمانی به دو کلاس: 1-تخریب شده (قرمز) و 0-عدم تخریب (آبی).
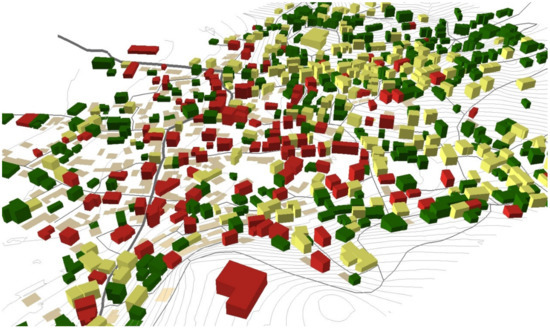
شکل 13. نقشه سه بعدی سکونتگاه سنتی وریسا که نتیجه فرآیند تخریب در چند ماه اخیر را ارائه می دهد. رنگ طبقه بندی آسیب ساختمان های باقی مانده را نشان می دهد، در حالی که ساختمان های تخریب شده به عنوان ردپا ارائه می شوند.


بدون دیدگاه