1. معرفی
محلی سازی یکی از فناوری های اصلی برای خدمات نقشه برداری و نقشه برداری داخلی است [ 1 ، 2 ]. به منظور دستیابی به ناوبری و موقعیت یابی دقیق در داخل ساختمان، بسیاری از فناوری های ناوبری و موقعیت یابی به سرعت بر اساس باند فوق گسترده (UWB) [ 3 ، 4 ]، فرکانس رادیویی (RF) [ 5 ، 6 ]، Wi-Fi [ 7 ، ] توسعه یافته اند. 8 ، بلوتوث [ 9 ، 10 ]، بینایی [ 11 ، 12 ]، ZigBee [ 13 ، 14 ]، و ترکیبات چند حسگر [ 15 ، 16 ]]. حسگرهای بینایی یک فناوری رسانه جریانی هستند که می توانند به اطلاعات بافت غنی دست یابند و اطلاعات را در زمان واقعی منتقل کنند، که می تواند برای بومی سازی و جمع آوری اطلاعات محیطی استفاده شود و در بازرسی Chang’e III چین و مریخ نوردهای روح و فرصت استفاده شده است. در آمریکا [ 17 ، 18 ]). تا به امروز، تحقیقات روی روشهای ناوبری فضایی و موقعیتیابی مبتنی بر حسگرهای بینایی توسعه شدیدی را تجربه کرده است [ 19 ، 20 ] و تقریباً میتوان آن را به دو گروه طبقهبندی کرد. در یک دسته، محققان از نشانه های موجود در محیط برای تخمین ماتریس دوربین و استخراج مکان پرس و جو استفاده می کنند [ 21 ، 22]. دسته دیگر شامل آثاری است که از یک پایگاه داده تصویر ذخیره شده با اطلاعات موقعیت دوربین ها، مانند روش های مبتنی بر انگشت نگاری تصویر استفاده می کنند [ 23 ، 24 ]. روش های متداول موقعیت یابی بصری عبارتند از موقعیت یابی تک چشمی [ 25 ، 26 ]، موقعیت یابی دو چشمی [ 27 ] و موقعیت یابی RGB-D [ 12 ، 28 ]. در میان آنها، روش موقعیت یابی دید تک چشمی فقط به یک دوربین برای تعیین موقعیت نیاز دارد و از یک تصویر تک فریم یا تصاویر استریو استفاده می کند. بسیاری از محققان فناوری های موقعیت یابی دید تک چشمی را مطالعه کرده اند. به عنوان مثال، لیو و همکاران. [ 29] یک روش محلی سازی خود را برای ربات های متحرک داخلی بر اساس نشانه های مصنوعی و دید استریو دوچشمی پیشنهاد کرد. رویر و همکاران [ 25 ] روش های محلی سازی و ناوبری خودکار برای یک ربات متحرک را بر اساس دید تک چشمی مورد مطالعه قرار داد و پیشنهاد کرد که با استفاده از یک دوربین تک چشمی و نقطه عطف طبیعی، ناوبری مستقل یک ربات متحرک از طریق راهنمایی و یادگیری دستی قابل دستیابی است. ژونگ و همکاران [ 30 ] یک طرح خود-محلی سازی مورد استفاده برای ناوبری ربات سیار داخلی را بر اساس یک طراحی قابل اعتماد و تشخیص نشانه های بصری مصنوعی ارائه کرد. شیائو و همکاران [ 31] روشی را پیشنهاد کرد که می تواند اجسام ساکن را در فضاهای داخلی بزرگ تشخیص دهد و سپس موقعیت گوشی هوشمند را برای تعیین مکان کاربر محاسبه کند. با کمک UWB، رامیرز و همکاران. [ 32 ] یک روش محلی سازی نسبی با استفاده از بینایی کامپیوتر و محدوده UWB برای یک ربات پرنده پیشنهاد کرد و نشان داد که خطاها در موقعیت های نسبی تخمینی بین 0.190 ± متر در محور x-East و ± 0.291 متر در محور z-North بود. در سطح اطمینان 95 درصد Tiemann و همکاران [ 33 ] یک روش ناوبری داخلی پهپاد پیشرفته را با استفاده از محلیسازی UWB تقویتشده SLAM پیشنهاد کرد، که در آن، محلیسازی UWB تقویتشده با SLAM دارای 90 درصد خطای چندک 13.9 سانتیمتری بود.
علاوه بر این، فناوریهای موقعیتیابی مبتنی بر حسگرهای بصری، مانند سازههای حرکت (SFM)، مکانیابی و نقشهبرداری همزمان (SLAM)، و کیلومتر شمار بصری (VOs) به طور گسترده مورد مطالعه قرار گرفتهاند. رافائل و همکاران [ 34 ] روش جدیدی را برای حل همزمان مسائل نقشه برداری و محلی سازی با استفاده از مجموعه ای از نشانگرهای مسطح مربع پیشنهاد کرد. آزمایشها نشان میدهند که روش پیشنهادی بهتر از تکنیکهای Structure from Motion و تصویری SLAM عمل میکند. لیم و همکاران [ 35] مکانسازی و نقشهبرداری همزمان تک دوربین (SLAM) را با استفاده از نشانههای مصنوعی پیشنهاد کرد. با این حال، تکنیک استفاده از ویژگیهای طبیعی برای اجرای SLAM داخلی هنوز به اندازه کافی برای استفاده عملی بالغ نشده است، زیرا استثناها و مفروضات بسیار زیادی دارد. علاوه بر این، روشهای موجود که از نشانهها یا ویژگیهای طبیعی استفاده میکنند، به دلیل شکست در ارتباط دادهها بسیار شکننده هستند. با این حال، به لطف مدل شاخص پیشنهادی، که شامل یک کد شناسایی در سطح است، ارتباط داده بسیار موفق است. علاوه بر این، موقعیت سه بعدی هر نقطه عطف را می توان از یک فریم تصویر به دست آورد. در محیطهای فاقد GPS، نشان داده شده است که VO یک خطای موقعیت نسبی از 0.1٪ تا 2٪ را ارائه میکند [ 19 ، 36 ]]. فناوری SLAM و VO هر دو نوع روش های موقعیت یابی نسبی هستند. معمولاً برای دستیابی به موقعیت مطلق لازم است با سایر سنسورها یا نقاط کنترل همکاری کرد.
بررسی فوق نشان میدهد که بسیاری از روشهای تحقیقاتی که مبتنی بر دید تک چشمی هستند، تأثیر اندازه باقیمانده مشاهدات را در نظر نمیگیرند. در نتیجه، خطاهای موجود در مقادیر مشاهداتی که با روشهای بصری به دست میآیند را نمیتوان به طور موثر شناسایی، شناسایی یا رد کرد، زیرا این امر منجر به نتایج نادرست میشود.
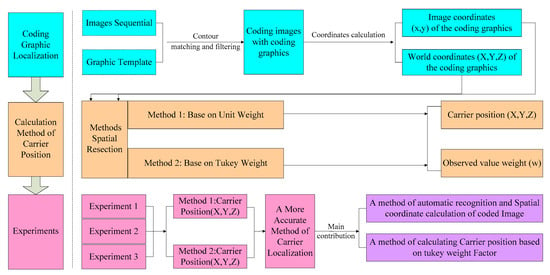
به منظور غلبه بر مشکلات فوق، این مقاله یک روش اندازهگیری موقعیت سکوی قوی مبتنی بر گرافیک کدگذاری و یک حسگر دید تک چشمی را پیشنهاد میکند. این روش می تواند خدمات ناوبری و موقعیت یابی قوی را برای یک پلت فرم موبایل داخلی فراهم کند. مسیر فنی این روش در شکل 1 نشان داده شده است . ابتدا یک سری گرافیک کدگذاری برای موقعیت یابی پلت فرم طراحی شده و روشی برای محاسبه مختصات فضایی گرافیک کدگذاری پیشنهاد شده است. ثانیا، دو مدل برداشت فضایی بر اساس وزن واحد [ 37 ] و وزن توکی [ 37 ، 38 ، 39 ، 40 ساخته شده است.]، به ترتیب. سپس محیط های تست داخلی مناسب برای موقعیت یابی استاتیک و پویا پلت فرم ساخته می شوند و تست های موقعیت یابی استاتیک و پویا پلت فرم متحرک انجام می شود. در نهایت، نتایج موقعیت هر دو روش با مقادیر واقعی مقایسه شده و امکانسنجی و استحکام روشهای این مقاله با آزمایشها مورد تجزیه و تحلیل قرار میگیرد. مشارکت های اصلی این مطالعه شامل روشی برای تشخیص خودکار و محاسبات مختصات فضایی تصاویر کدگذاری شده، و همچنین روشی برای محاسبه موقعیت حامل بر اساس ضریب وزن توکی است.
ادامه این مقاله به شرح زیر سازماندهی شده است. بخش 2 به اختصار روش های محلی سازی گرافیکی کدگذاری و محاسبه موقعیت را مرور می کند. آزمایشهای موقعیتیابی و بحث در بخش 3 انجام شده است. در بخش 4 ، برخی از نتایج مربوط به کار خلاصه شده است.
2. مواد و روشها
یک روش مکان یابی خودکار مبتنی بر دید و کدگذاری تصاویر در این مقاله پیشنهاد شده است. گرافیک کدگذاری نقش نقاط کنترل را در فتوگرامتری به عهده می گیرد. برای تحقق موقعیت یابی خودکار، لازم است بتوانیم تصویر و مختصات جهانی گرافیک کدگذاری را به صورت خودکار بدست آوریم. سپس یک معادله خطی بر اساس اصل نقاط تصویر، مرکز عکاسی و نقاط جسم در یک خط مستقیم ساخته میشود. در نهایت، موقعیت یابی بر اساس روش برداشتن فضای عقب محقق می شود. محتوای اصلی شامل دو بخش است: کدگذاری محلی سازی گرافیکی و روش های محاسبه موقعیت. جزئیات به شرح زیر است.
2.1. محلی سازی گرافیک کد نویسی
2.1.1. طراحی گرافیک کد نویسی
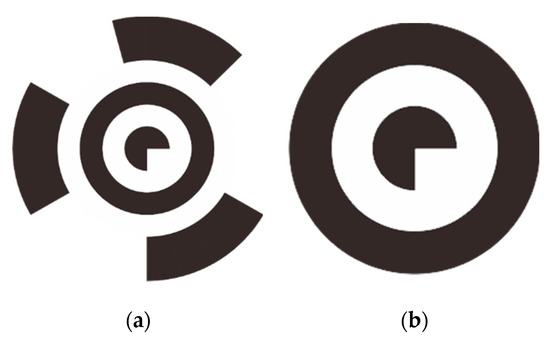
به منظور ارائه اطلاعات موقعیت یابی داخلی برای پلتفرم های موبایل داخلی، این مقاله مجموعه ای از گرافیک های کدگذاری را با رنگ های سیاه و سفید طراحی می کند که در شکل 2 نشان داده شده است.آ. گرافیک کدنویسی شامل پنج لایه است. از داخل به بیرون، لایه اول یک دایره سیاه 3/4، لایه دوم و چهارم حلقه های دایره ای سفید، لایه سوم یک حلقه دایره سیاه و لایه پنجم یک لایه کدگذاری است که به 24 تقسیم می شود. قسمت های مساوی سیاه و سفید وقتی از لایه کدگذاری برای نمایش یک عدد کدگذاری استفاده می شود، سیاه به معنای 0 باینری و سفید به معنای 1 باینری است. پنج لایه مرکز دایره ای یکسانی دارند. شعاع هر لایه R است، به جز لایه پنجم که شعاع آن 2R است. طبق ترتیب خلاف جهت عقربه های ساعت، عدد کدگذاری از 24 ‘0’ و ‘1’ تشکیل شده است. مقادیر کدگذاری می تواند 2 24 باشد. همانطور که در شکل 2 b نشان داده شده است، سه لایه داخلی یک الگوی گرافیکی را تشکیل می دهند [ 41 ]]، که می تواند برای تعیین وجود گرافیک کدنویسی در تصویر استفاده شود.
گرافیک کدگذاری می تواند نقش تصویر کنترل کننده را ایفا کند، که لازم است بتواند به طور خودکار تصویر کد کننده را شناسایی و شناسایی کند، اعداد کدگذاری را تعیین کند و مختصات تصویر و جهان را برای موقعیت مرکزی گرافیک محاسبه کند. بر اساس روش برداشت فضا، سه یا چند تصویر کنترل کننده برای محاسبه موقعیت دوربین مورد نیاز است. علاوه بر این، توزیع یکنواخت نقاط کنترل روی تصویر برای بهبود دقت نتایج موقعیت یابی مفیدتر خواهد بود. مختصات جهانی هر گرافیک توسط یک ایستگاه کل الکترونیکی که یک سیستم ابزار نقشه برداری و نقشه برداری است اندازه گیری می شود.
2.1.2. کدگذاری شناسایی و بومی سازی گرافیکی
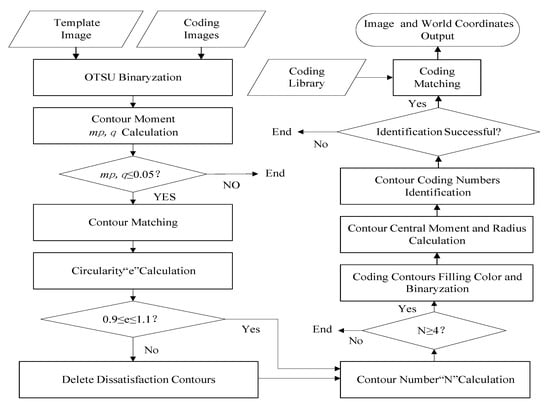
این مقاله یک روش شناسایی و استخراج خودکار برای کدگذاری گرافیک ها و مختصات فضایی آنها، از جمله رمزگذاری تشخیص گرافیکی بر اساس تطبیق خطوط [ 42 ]، مقدار گشتاور [ 43 ]، و قضاوت آستانه گردی [ 43 ]، و همچنین یک خودکار پیشنهاد می کند. استخراج مختصات تصویر گرافیک کدگذاری بر اساس لحظه مرکز کانتور و روشی برای نگاشت مختصات جهانی گرافیک کدگذاری به پایگاه داده گرافیک کدگذاری. نمودار جریان در شکل 3 نشان داده شده است .
در این مقاله، از روش تطبیق کانتور برای عبور از گرافیک کدگذاری از تصویر کدگذاری نشان داده شده در شکل 4 استفاده شده است.و شباهت بین گرافیک قالب و گرافیک کدگذاری روی تصویر کدنویسی با توجه به لحظه محاسبه شده قضاوت می شود. اگر لحظه محاسبه شده با تنظیم آستانه مطابقت داشته باشد، تطبیق کانتور انجام می شود. در غیر این صورت، محاسبه خاتمه می یابد. در فرآیند تطبیق کانتور، در دسترس بودن یا نبودن کانتور با توجه به گرد بودن آن قضاوت می شود. اگر گرد بودن آن با تنظیم آستانه مطابقت نداشته باشد، کانتور به عنوان یک نمایه بی فایده تعریف شده و حذف می شود. اگر تنظیم آستانه برآورده شود، تعداد خطوطی که الزامات را برآورده میکنند محاسبه میشود، که لازم است تعداد خطوط کمتر از چهار نباشد. اگر نه، محاسبه خاتمه می یابد. شعاع کانتور با توجه به رابطه بین محیط کانتور و مساحت محاسبه می شود. و مقدار مشاهده مختصات نقطه مرکزی نمودار کدگذاری شده با توجه به گشتاور مرکز کانتور محاسبه می شود. با توجه به روش موجود در این مقاله، توالی کدگذاری کانتور را می توان شناسایی و تعیین کرد. با استفاده از روش نگاشت مختصات جهانی گرافیک کدگذاری به پایگاه داده گرافیک کدگذاری، مختصات جهانی نقاط مرکزی گرافیک کدگذاری شده به دست می آید.
فرآیندهای اصلی تطبیق کانتور، فیلتر کردن کانتور و اکتساب مختصات فضایی به شرح زیر است.
تطبیق کانتور [ 42 ]: گرافیک کدگذاری را می توان با استفاده از تطبیق کانتور جستجو و مکان یابی کرد. در فرآیند تطبیق، اگر ممان کانتور [ 43 ] نشان داده شده توسط مترپ،qبا شباهت نسبت معکوس دارد، پس هر چه مقدار کوچکتر باشد، شباهت بیشتر است: آزمایش نشان می دهد که 0.05 اثر بهتری دارد و الزامات مقدار آستانه را برآورده می کند. در این صورت، روند تطبیق ادامه خواهد یافت. در غیر این صورت، متوقف خواهد شد [ 44 ]. شکل 5 نتایج تطبیق را نشان می دهد.
کجا لحظه پمربوط به ایکسبعد و لحظه qمربوط به yبعد، ابعاد، اندازه. سفارشات نمایانگر شاخص های قسمت های مربوطه است.
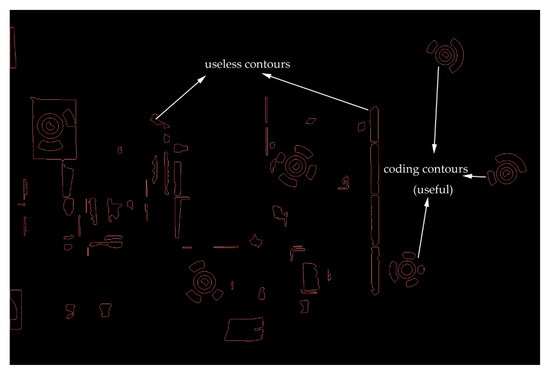
فیلتر کردن کانتور: اگر دایره ‘ e ‘ [ 43 ] مقدار آستانه را برآورده نکند، کانتور به عنوان یک نمایه بی استفاده که دایره یا بیضی نیست، همانطور که در شکل 5 نشان داده شده است ، تعریف می شود و حذف می شود. اگر مقادیر خطوط کمتر از 4 باشد، محاسبه خاتمه می یابد.
که در آن S مساحت یک کانتور و C طول کانتور است. بنابراین، دایره دایره 1 است. هنگامی که 0.9 ≤ e ≤ 1.1، فیلتر کردن نتیجه بهتری دارد، همانطور که در شکل 6 مشاهده می شود .
محاسبه مختصات تصویر: شعاع کانتور را می توان با فرمول (3) محاسبه کرد. مختصات تصویر (ایکس0،y0)گرافیک کدگذاری را می توان با استفاده از فرمول محاسبه (4) لحظه مرکز کانتور محاسبه کرد [ 43 ]
جایی که V(من،j)نشان دهنده مقدار خاکستری تصویر در (من،j)نقطه بعد از تقسیم بندی باینری خودکار وقتی تصویر یک تصویر باینری است، م00مجموع نواحی سفید روی تصویر است. م10تجمع مقادیر مختصات x نواحی سفید روی تصویر است و م01تجمع مقادیر مختصات y نواحی سفید روی تصویر است که می توان از آن برای محاسبه مرکز ثقل تصویر باینری استفاده کرد، همانطور که در شکل 7 نشان داده شده است.
محاسبه مختصات جهان: مختصات از طریق نگاشت کدگذاری بین کدگذاری کانتور و پایگاه داده آن به دست می آید. در این پایگاه داده، هر کد دارای گروهی از مختصات جهانی برای یک گرافیک کدگذاری است که توسط ایستگاه کل الکترونیکی اندازه گیری می شود [ 41 ].
مختصات جهانی یک گرافیک کدگذاری با دنبال کردن مراحل زیر تعیین میشود: جستجوی خط پایه، شناسایی دنبالههای کدگذاریشده و تطبیق پایگاه داده کدگذاریشده. ابتدا، برای جستجوی خط مبنا، مرکز یک گرافیک به عنوان مبدأ در یک فاصله یک درجه با یک تعریف می شود. 12آرشعاع جستجو سپس باینریزه شدن نمودار دایره 3/4 بازیابی می شود و ‘0’ یا ‘1’ هر نقطه تعیین می شود. خطی که باینری سازی از «1» به «0» تغییر می کند به عنوان خط مبنا تعریف می شود. به گفته وانگ و همکاران. [ 41 ]، مختصات جهان را می توان با انجام مراحل دوم و سوم به دست آورد. جدول 1 بخشی از توالی کدگذاری و مختصات فضایی مرکز را نشان می دهد.
به دلیل تأثیر زاویه دوربین، گرافیک کدگذاری شده روی تصویر تغییر شکل می دهد. وقتی صفحه دایره ای به سمت صفحه برآمدگی کج می شود، برآمدگی آن بیضی است. هنگامی که صفحه دایره ای موازی با صفحه برآمدگی باشد، شکل واقعی دایره را در صفحه طرح ریزی منعکس می کند. هنگامی که گونه گرد عمود بر صفحه طرح ریزی شده باشد، برآمدگی آن بر روی صفحه پیش بینی شده در یک خط مستقیم جمع می شود [ 45 ]. در نتیجه، نقطه مرکزی گرافیک کدگذاری شده با موقعیت واقعی اندازه گیری ناسازگار است و یک خطای نامنظم ایجاد می شود که نیاز به تجزیه و تحلیل دارد. از طریق تحلیل ادبیات [ 46]، مشخص می شود که حداکثر انحراف زمانی رخ می دهد که زاویه بین محور نوری اصلی و صفحه موضوع 40 درجه تا 60 درجه باشد. با این حال، این زاویه به اندازه تصویر و فاصله از مرکز طرح ریزی تا صفحه هدف و همچنین فاصله اصلی بستگی دارد.
به منظور نشان دادن وجود خطای باقیمانده در مقادیر مشاهده شده، 192 مشاهده مختصات صفحه تصویر از 96 گرافیک کدگذاری شده در موقعیت ها و زوایای مختلف در آزمایش 1 و آزمایش 2 محاسبه شده است. خطای مقدار مشاهده تفاوت بین مقدار مشاهده و برآورد آن با استفاده از وزن واحد معادل و اصل حداقل مربع بر اساس معادله خطی محاسبه می شود. نتایج نشان می دهد که بین مقادیر مشاهده شده و مقادیر برآورد شده واقعی تفاوت وجود دارد. 77.60% اختلاف کمتر از RMSE (ریشه میانگین مربعات خطا) خطا، 15.62% حدود 1-2 برابر RMSE، 4.17% بیش از دو برابر RMSE و 2.61% حدود بیش از سه بود. برابر RMSE از این رو،
با توجه به توزیع خطا، وزن های مختلفی برای تضعیف یا مهار تأثیر مقادیر مشاهده شده با خطاهای بزرگ در نتایج اندازه گیری، به منظور اطمینان از دقت اندازه گیری، تخصیص داده می شود.
روش محاسبه خودکار برای مختصات تصویر و جهان نقاط کنترل در بالا توضیح داده شده است. در زیر یک روش موقعیت یابی بر اساس معادله هم خطی و اصل برداشتن فضا ارائه شده است. جزئیات به شرح زیر است.
2.2. روش های محاسبه موقعیت
2.2.1. روشی بر اساس وزن واحد
گرافیک کدگذاری و روش برداشت فضا بر اساس معادله هم خطی برای محاسبه مختصات پلت فرم اتخاذ شده است. با توجه به روش برداشتن فضا، با چهار یا چند گرافیک کدگذاری که روی جسم مورد عکسبرداری توزیع شدهاند، موقعیت سکو را میتوان با معادله هم خطی محاسبه کرد [ 47 ]
جایی که (ایکس،y)مختصات تصویر را نشان می دهد که مشاهدات هستند. (ایکس0،y0)مختصات نقطه اصلی مقادیر داده شده را نشان می دهد. f فاصله کانونی مقدار داده شده است. (ایکس،Y،ز)مختصات جهانی مرکز گرافیک کدگذاری از مقادیر داده شده است. (ایکساس،Yاس،زاس)مختصات جهانی مرکز نمایش (یعنی موقعیت دوربین در لحظه عکسبرداری) هستند. [آ1،ب1،ج1;آ2،ب2،ج2;آ3،ب3،ج3]یک ماتریس ضریب مربوط به عناصر زاویه ای عناصر جهت بیرونی است φ، ω، κ، که در فرمول (6) قابل دریافت است.
با فرض اینکه مقادیر تقریبی عناصر جهت بیرونی (ایکساس، Yاس، زاس، φ، ω، κ)هستند (ایکساس0، Yاس0، زاس0، φ0، ω0، κ0)،آنها را می توان با فرمول (9) محاسبه کرد.
جایی که (ایکسمن، Yمن، زمن)مختصات جهانی گرافیک کدنویسی هستند. اچمحدوده تقریبی بین دوربین تا جسم عکاسی شده است. با استفاده از (ایکساس0، Yاس0، زاس0، φ0، ω0، κ0)و (ایکسمن، Yمن، زمن)، مقادیر محاسبه شده (ایکس¯ج، Y¯ج، ز¯ج)از (ایکس¯، Y¯، ز¯)می توان به دست آورد.
بنابراین، مقادیر محاسبه شده مختصات تصویر برای گرافیک کدنویسی است (ایکسج، yج)
زیرا (ایکسج، yج)محاسبه می شود (ایکساس0، Yاس0، زاس0، φ0، ω0، κ0). بنابراین، اندازه از (ایکس-ایکسج، y-yج)مربوط به دقت است (ایکساس0، Yاس0، زاس0، φ0، ω0، κ0). فرض کنید که اعداد تصحیح از (ایکساس0، Yاس0، زاس0، φ0، ω0، κ0)هستند (دایکسس، دYسدزس، دφ، دω، دک); سپس با استفاده از فرمول تیلور می توان نتایج زیر را به دست آورد:
جایی که
فرمول (11) به صورت زیر به معادله خطا تبدیل می شود
معادله (13) را می توان به صورت ماتریس نوشت
جایی که
با توجه به اصل تنظیم حداقل مربع، معادله نرمال را می توان به صورت زیر فهرست کرد، جایی که پماتریس وزن مشاهدات را نشان می دهد:
معادله نرمال معادله (14) است.
در این روش وزن واحد داریم بنابراین بیان معادله نرمال معادله (16) است.
بیان محاسبه موقعیت مرکز طرح ریزی (یعنی موقعیت یک وسیله نقلیه) به شرح زیر است
2.2.2. روشی بر اساس وزن توکی
در فتوگرامتری با برد نزدیک، تصاویری که در موقعیت ها و زوایای مختلف مشاهده می شوند دارای اعوجاج زیادی هستند [ 46 ]. این اعوجاج می تواند باعث انحراف در مختصات مرکزی تصاویر کدگذاری شود. هنگامی که مختصات را با معادله (16) با استفاده از وزن واحد یکسان برای هر مقدار مشاهده محاسبه می کنیم، انحرافات دقت محاسبه موقعیت را کاهش می دهد. بنابراین، این مقاله یک مدل اندازه گیری موقعیت قوی را بر اساس Tukey [ 38 ، 39 ، 40 پیشنهاد می کند.] ضریب وزن که با خطاهای مشاهده تعیین می شود. از طریق تابع وزن، مقادیر مشاهده شده به مقادیر موثر، در دسترس و خطای ناخالص مشاهده شده تقسیم می شوند. بر اساس طبقه بندی، وزن به یک ناحیه تضمین شده تقسیم می شود که مشاهده اصلی را بدون تغییر نگه می دارد، یک ناحیه وزن کاهش یافته که به وزن مشاهده محدود می شود و یک ناحیه رد که وزن صفر است.
روش تخمین بر اساس ضریب وزن توکی، حداکثر احتمال احتمال را در یک ناحیه منسوخ که تابع تأثیر آن محدود است، ارائه میکند. این روش به تغییرات کوچک در قسمت میانی مقادیر مشاهده حساس نیست، اما به تغییرات بزرگ حساس است. با توجه به تغییرات مشاهدات، این روش می تواند وزن های متفاوتی را تعیین کرده و ارزش گذاری بهتری ایجاد کند. تابع ضریب وزن توکی معادله (20) است. دو وزن را می توان به عنوان یک میانگین نمونه با وزن مجدد محاسبه کرد، که در آن وزن ها بر اساس برآورد به دست آمده در تکرار قبلی تعریف می شوند [ 37 ، 39 ]
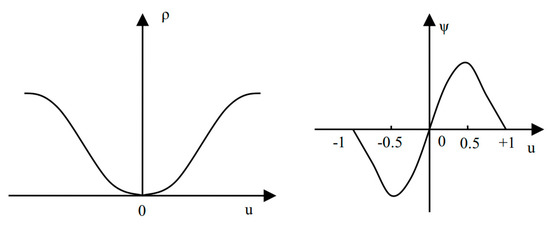
همانطور که در شکل 8 نشان داده شده است ، ρ(تو)تابع ضرر است، φ(تو)تابع نفوذ است و ω(تو)تابع ضریب وزن خطا است که در فرآیند تحقیق استفاده می شود. از جمله این توابع،
جایی که vباقیمانده مشاهده است. ایکس^نشان دهنده ارزش گذاری است ایکسمحاسبه شده در طول تکرار بر اساس روش هم ارزی، و ایکس^تیتوکهyنشان دهنده ارزش گذاری است ایکسدر طول تکرار بر اساس ضریب وزن توکی محاسبه می شود. c ضریب رگرسیون است و مقدار کلی 6 تا 12 است (در اینجا مقدار 8 است).
3. آزمایش ها و بحث
سه آزمایش گروهی انجام شد. آزمایش 1 در آزمایشگاه چینی Toprs Co., Ltd. انجام شد که برای بررسی امکان سنجی و صحت روش هنگام عکسبرداری از یک منطقه در موقعیت ها و زوایای مختلف استفاده شد. آزمایش دوم در اتاق کنفرانس شرکت انجام شد که برای بررسی امکان سنجی و صحت روش هنگام عکاسی از مناطق مختلف در موقعیت ها و زوایای مختلف استفاده شد. آزمایش سوم در آزمایشگاه دانشگاه مهندسی عمران و معماری پکن انجام شد که برای تأیید امکانسنجی و صحت روش در شرایط دینامیکی مورد استفاده قرار گرفت. هنگام استفاده از این روش، لازم است چهار یا چند گرافیک کدنویسی در یک تصویر کدگذاری وجود داشته باشد و تا حد امکان زاویه بین محور نوری اصلی و عادی جسم عکاسی شده در ± 60 درجه باشد. سوژه نیز باید در محدوده عمقی خوب نگه داشته شود.
3.1. آزمایش 1
در طول آزمایش، 22 تصویر کدگذاری بر روی دیوار داخلی قرار داده شد. تصاویر کدگذاری از موقعیت ها و زوایای مختلف توسط دوربین سونی ILCE-QX1 با لنز با فاصله کانونی 24 میلی متر، کالیبره شده با استفاده از روش ژانگ [ 48 ] به دست آمد. همانطور که در شکل 9 نشان داده شده است ، از چهار گروه از تصاویر کدگذاری که در چهار موقعیت عکس گرفته شده اند، به عنوان داده های تجربی استفاده شده است.
ابتدا، مقادیر مشاهده مختصات تصویر برای هر گرافیک کدگذاری با استفاده از روش این مقاله به دست آمد. دوم، خطاهای باقیمانده مشاهدات، وزن ها، RMSE (فهرست شده به عنوان m0)، و همچنین موقعیت های فضایی سکو، با استفاده از دو روش (یکی بر اساس وزن واحد و دیگری بر اساس وزن توکی است) محاسبه شد که در این کاغذ. در نهایت، نتایج محاسباتی پلت فرم با موقعیت های واقعی مقایسه شد.
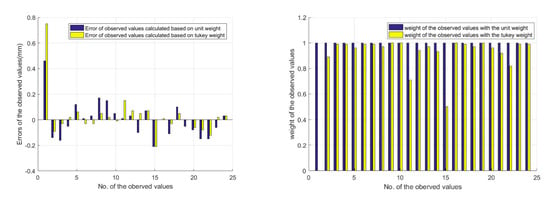
شکل 10خطاهای باقیمانده و وزن گروه 1 محاسبه شده با دو روش این مقاله را نشان می دهد. خطاهای باقیمانده در اندازه و توزیع متفاوت است. برخی کمتر از m0، برخی در محدوده 1-2 برابر و برخی بیش از دو برابر هستند. هنگام استفاده از روش وزن واحد برای محاسبات، وزن هر مقدار مشاهده یک است. در این مورد، مشاهدات را نمی توان متفاوت رفتار کرد. هنگامی که از روش وزن توکی برای محاسبات استفاده می شود، وزن مقادیر مشاهده شده بسته به مقدار باقیمانده متفاوت است. در این حالت می توان سهم مقادیر مشاهداتی را در نتایج تغییر داد و سهم مقادیر مشاهدات مضر را کاهش و یا حتی سرکوب کرد. به عنوان مثال، خطای مشاهده 0.75 میلی متر – بیش از سه برابر m0 – و وزن آن صفر است.
به منظور نشان دادن وزن مقادیر مشاهده شده، شکل 11 رابطه متناظر بین خطای باقیمانده و وزن را نشان می دهد. خط آبی نشان دهنده نسبت بین خطای باقیمانده (فهرست شده به عنوان v) و m0 و خط قرمز نشان دهنده مقدار وزن است. شکل 11 a وزن مقدار مشاهده را هنگامی که v کمتر از m0 است نشان می دهد و وزن با افزایش خطای ناخالص کاهش می یابد. حداکثر وزن 1.00 و حداقل وزن 0.57 است. شکل 11b وزن مقدار مشاهده را هنگامی که خطا بیشتر از m0 باشد نشان می دهد. نتایج نشان می دهد که هر چه خطاهای فاحش بیشتر باشد، وزن ها کوچکتر است. به عنوان مثال، وزن مشاهدات با خطا در محدوده 1-2 برابر m0 حداقل 0.36 و حداکثر 0.90 است، در حالی که مشاهدات با خطاهای بیش از دو برابر m0 مضر هستند و وزن آنها صفر است.
در این مقاله، موقعیتهای سکوی محاسبهشده با دو روش با موقعیتهای واقعی جمعآوریشده توسط ایستگاه توتال الکترونیکی مقایسه شده و دقت میتواند به سطح میلیمتری برسد. نتایج در جدول 2 نشان داده شده است.
با استفاده از شرایط آزمایشی دید تک چشمی، دقت موقعیت محاسبه شده با روش وزن توکی در مقایسه با روش وزن واحد بهبود یافت. دقت حداقل هواپیما 29.76 درصد و حداکثر 49.42 درصد افزایش یافته است در حالی که دقت حداقل ارتفاع 29.17 درصد و حداکثر 74.07 درصد افزایش یافته است.
با توجه به آزمایشات، نتایج نشان می دهد که خطاهای فاحش مشاهدات را می توان به طور موثر با روش وزن توکی تشخیص داد. علاوه بر این، مشاهدات با اندازه های مختلف خطاهای فاحش مقدار بهینه ای خواهند داشت و دقت نتایج اندازه گیری بهبود می یابد.
3.2. آزمایش 2
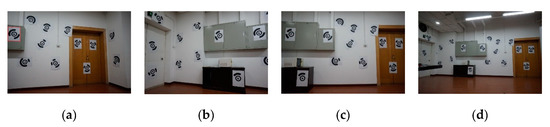
در این آزمایش، همانطور که در شکل 12 نشان داده شده است، یک دیوار داخلی از نوع ‘u’ با 39 گرافیک کدگذاری به عنوان محیط آزمایشی انتخاب شد . تصاویر کدگذاری به طور خودکار از 12 ایستگاه مختلف هنگام حرکت سکو به دست آمد. هر تصویر کدنویسی شامل پنج تا هشت گرافیک کدنویسی بود. سپس نتایج محاسبات برای موقعیت های پلت فرم مقایسه شد.
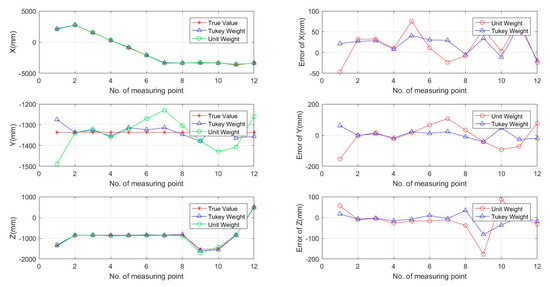
در آزمایشها، موقعیتهای سکوی بهدستآمده توسط ایستگاه کل الکترونیکی به عنوان مقادیر واقعی در نظر گرفته شد و دقت توانست به سطح میلیمتری برسد. نتایجی که با دو روش این مقاله محاسبه شد با هم مقایسه شد. شکل 13 سه تغییر محوری در X ، Y و Z را در فضای استریوی O – XYZ و همچنین مقایسه دقت مسیر بین دو روش نشان میدهد.
از نمودار می توان دریافت که در مقایسه با روش وزن واحد، نتایج محاسبه شده با روش وزن توکی به مقدار واقعی نزدیکتر و مقدار خطا کوچکتر است. بنابراین، دقت بهبود یافته است. نتایج محاسبات دو روش در جدول 3 نشان داده شده است.
با استفاده از شرایط آزمایشی دید تک چشمی، دقت موقعیت محاسبه شده با روش وزن توکی به طور قابل توجهی نسبت به روش وزن واحد بهبود یافت. دقت حداقل هواپیما 16.96% و حداکثر 66.34% افزایش یافت در حالی که دقت حداقل ارتفاع 9.40% و حداکثر 71.05% افزایش یافت.
3.3. آزمایش 3
به منظور تأیید صحت روش پیشنهادی، آزمایشی در آزمایشگاه ناوبری و موقعیت یابی سرپوشیده یک دانشگاه انجام شد، همانطور که در شکل 14 نشان داده شده است. این آزمایشگاه دارای یک مدار ثابت با اطلاعات مکانی شناخته شده است و دقت آن می تواند به سطح میلی متری برسد. این آزمایشگاه همچنین دارای یک وسیله نقلیه ریلی خودمختار الکتریکی است. در طول آزمایش، دوربین در یک واگن ریلی که در مسیری ثابت حرکت می کرد، نصب شد و تصاویر جمع آوری شد.
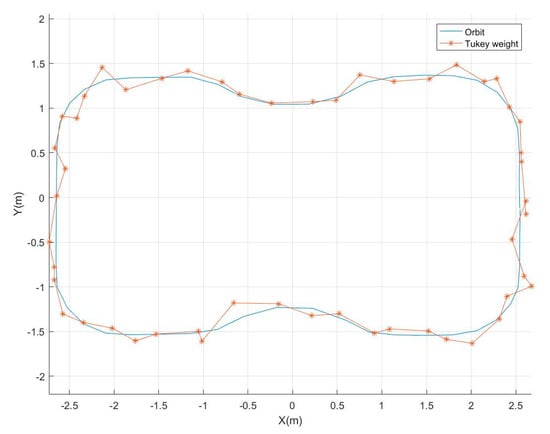
در طول آزمایش، در مجموع 51 تصویر به دست آمد. همانطور که در شکل 15 نشان داده شده است، با استفاده از روش این مقاله، موقعیت وسیله نقلیه هنگام عکسبرداری محاسبه شد و مسیر دویدن خودرو ترسیم شد .
با مقایسه موقعیت وسیله نقلیه محاسبه شده توسط این روش با نزدیکترین نقطه در مسیر، انحراف اندازه گیری موقعیت صفحه این روش، همانطور که در شکل 16 نشان داده شده است، به دست آمد . حداکثر انحراف اندازه گیری 0.17 متر در جهت X و 0.22 متر در جهت Y بود. RMSE هواپیما 0.14 متر بود.
شکل 17 منحنی تابع توزیع تجمعی (CDF) خطا را نشان می دهد که محدوده توزیع خطا را نشان می دهد. مشاهده می شود که حدود 22 درصد نقاط دارای دقت موقعیت یابی بهتر از 0.05 متر، حدود 67 درصد نقاط دارای دقت موقعیت یابی بهتر از 0.1 متر، حدود 96 درصد نقاط دارای دقت موقعیت یابی بهتر از 0.15 متر هستند. و تنها حدود 4 درصد از نقاط دارای خطای بین 0.2 تا 0.25 متر بودند.
بر اساس مطالعه متن کامل، میتوان دریافت که استفاده از حسگرهای بینایی بهعنوان یک فناوری رسانه جریانی نه تنها میتواند به اطلاعات محیطی غنی دست یابد، بلکه میتواند در زمان واقعی نیز منتقل شود. از نظر موقعیتیابی بصری، روشهای فنی اصلی شامل روشهای SLAM، VO، روشهای مبتنی بر اثرانگشت تصویر و روشهای حسگر خارجی یکپارچه میشود. SLAM و VO بدون کمک اطلاعات خارجی به موقعیت نسبی می رسند. روش پیشنهادی در این مقاله به موقعیتیابی مطلق دست یافت و میتواند به عنوان معیار کمکی روشهای قبلی برای دستیابی به موقعیت مطلق صحنههای بزرگ استفاده شود. در مقایسه با روش های مبتنی بر انگشت نگاری تصویر، روش ما یک مورد خاص است، زیرا نیازی به ساخت پایگاه داده تصویری از تمام محیط های داخلی ندارد و همچنین می تواند به عنوان یک روش اندازه گیری کنترلی استفاده شود. در مقایسه با روشهای موقعیتیابی به کمک حسگر مانند UWB، روش این مقاله تنها بر موقعیتیابی بصری برای دستیابی به نتایج موقعیتیابی با دقت معادل یا بالاتر متکی است که به آن مزیتی میدهد. با این حال، این روش همچنین دارای کاستی هایی است، مانند نیاز به استقرار گرافیک کدنویسی و اندازه گیری مختصات از قبل، که نیاز به کارهای مقدماتی دارد، به ویژه زمانی که در یک محیط در مقیاس بزرگ اعمال شود. در عین حال، به دلیل محدودیتهای استخراج ویژگی و سایر فنآوریها، خرابی مکان میتواند به راحتی در مناطقی رخ دهد که بافت پراکنده است یا شدت نور به سرعت تغییر میکند. به همین دلیل، ادغام این روش با روشهای SLAM، VO و/یا چند حسگر ممکن است پتانسیل کاربردی بهتری به آن بدهد. روش این مقاله برای دستیابی به نتایج موقعیتیابی با دقت معادل یا بالاتر، تنها بر موقعیتیابی بصری تکیه دارد که به آن مزیتی میدهد. با این حال، این روش همچنین دارای کاستی هایی است، مانند نیاز به استقرار گرافیک کدنویسی و اندازه گیری مختصات از قبل، که نیاز به کارهای مقدماتی دارد، به ویژه زمانی که در یک محیط در مقیاس بزرگ اعمال شود. در عین حال، به دلیل محدودیتهای استخراج ویژگی و سایر فنآوریها، خرابی مکان میتواند به راحتی در مناطقی رخ دهد که بافت پراکنده است یا شدت نور به سرعت تغییر میکند. به همین دلیل، ادغام این روش با روشهای SLAM، VO و/یا چند حسگر ممکن است پتانسیل کاربردی بهتری به آن بدهد. روش این مقاله برای دستیابی به نتایج موقعیتیابی با دقت معادل یا بالاتر، تنها بر موقعیتیابی بصری تکیه دارد که به آن مزیتی میدهد. با این حال، این روش همچنین دارای کاستی هایی است، مانند نیاز به استقرار گرافیک کدنویسی و اندازه گیری مختصات از قبل، که نیاز به کارهای مقدماتی دارد، به ویژه زمانی که در یک محیط در مقیاس بزرگ اعمال شود. در عین حال، به دلیل محدودیتهای استخراج ویژگی و سایر فنآوریها، خرابی مکان میتواند به راحتی در مناطقی رخ دهد که بافت پراکنده است یا شدت نور به سرعت تغییر میکند. به همین دلیل، ادغام این روش با روشهای SLAM، VO و/یا چند حسگر ممکن است پتانسیل کاربردی بهتری به آن بدهد. این روش همچنین دارای کاستی هایی است، مانند نیاز به استقرار گرافیک کدنویسی و اندازه گیری مختصات از قبل، که نیاز به کارهای مقدماتی دارد، به خصوص زمانی که در یک محیط در مقیاس بزرگ اعمال شود. در عین حال، به دلیل محدودیتهای استخراج ویژگی و سایر فنآوریها، خرابی مکان میتواند به راحتی در مناطقی رخ دهد که بافت پراکنده است یا شدت نور به سرعت تغییر میکند. به همین دلیل، ادغام این روش با روشهای SLAM، VO و/یا چند حسگر ممکن است پتانسیل کاربردی بهتری به آن بدهد. این روش همچنین دارای کاستی هایی است، مانند نیاز به استقرار گرافیک های کدنویسی و اندازه گیری مختصات از قبل، که نیاز به کارهای مقدماتی دارد، به خصوص زمانی که در یک محیط در مقیاس بزرگ اعمال شود. در عین حال، به دلیل محدودیتهای استخراج ویژگی و سایر فنآوریها، خرابی مکان میتواند به راحتی در مناطقی اتفاق بیفتد که بافت کم است یا شدت نور به سرعت تغییر میکند. به همین دلیل، ادغام این روش با روشهای SLAM، VO و/یا چند حسگر ممکن است پتانسیل کاربردی بهتری به آن بدهد. خرابی مکان به راحتی می تواند در مناطقی رخ دهد که بافت کم است یا شدت نور به سرعت تغییر می کند. به همین دلیل، ادغام این روش با روشهای SLAM، VO و/یا چند حسگر ممکن است پتانسیل کاربردی بهتری به آن بدهد. خرابی مکان به راحتی می تواند در مناطقی رخ دهد که بافت کم است یا شدت نور به سرعت تغییر می کند. به همین دلیل، ادغام این روش با روشهای SLAM، VO و/یا چند حسگر ممکن است پتانسیل کاربردی بهتری به آن بدهد.
4. نتیجه گیری و چشم انداز
این مقاله از روشهای ترکیبی کدگذاری گرافیک و دید تک چشمی استفاده میکند که میتواند به طور خودکار مختصات تصویر مشاهدهشده و مختصات جهانی مرکز گرافیک کدگذاری را بهدست آورد. از دو روش (به ترتیب بر اساس وزن واحد و وزن توکی) توسعه یافته در این مقاله می توان برای محاسبه موقعیت سکوهای متحرک در یک اتاق با دقت خوبی استفاده کرد. روش وزن توکی می تواند خطاهای ناخالص در مشاهدات را به طور موثر شناسایی کند و وزن مشاهدات را با توجه به خطاهای ناخالص آنها محاسبه کند. علاوه بر این، این روش می تواند مشارکت مقادیر مشاهده را از طریق اندازه وزن بهینه کرده و دقت نتایج را افزایش دهد. بر اساس نتایج این آزمایش ها، دقت هواپیما به طور متوسط 39.43٪ افزایش یافته است. و دقت ارتفاع به طور متوسط 49.85٪ افزایش یافته است. این نتایج نشان میدهد که این روش امکانپذیر است و بنابراین میتواند دقت اندازهگیریهای موقعیتیابی داخلی یک پلت فرم سیار را بهبود بخشد. علاوه بر این، نتایج تحقیقات این مقاله می تواند به عنوان معیار موقعیت یابی مطلق برای فناوری SLAM و VO مورد استفاده قرار گیرد که می تواند به موقعیت یابی مطلق دست یابد و با کمک ویژگی های طبیعی، تهیه گرافیک کدگذاری شده را بسیار کاهش دهد. علاوه بر این، با حل مشکل موقعیتیابی، میتوانیم اطلاعات محیطی را در زمان واقعی بدست آوریم که میتواند نجات اضطراری فضاهای داخلی و زیرزمینی و جمعآوری دادههای صحنه واقعی سه بعدی را تسهیل کند. این نتایج نشان میدهد که این روش امکانپذیر است و بنابراین میتواند دقت اندازهگیریهای موقعیتیابی داخلی یک پلت فرم سیار را بهبود بخشد. علاوه بر این، نتایج تحقیقات این مقاله می تواند به عنوان معیار موقعیت یابی مطلق برای فناوری SLAM و VO مورد استفاده قرار گیرد که می تواند به موقعیت یابی مطلق دست یابد و با کمک ویژگی های طبیعی، تهیه گرافیک کدگذاری شده را بسیار کاهش دهد. علاوه بر این، با حل مشکل موقعیتیابی، میتوانیم اطلاعات محیطی را در زمان واقعی بدست آوریم که میتواند نجات اضطراری فضاهای داخلی و زیرزمینی و جمعآوری دادههای صحنه واقعی سه بعدی را تسهیل کند. این نتایج نشان میدهد که این روش امکانپذیر است و بنابراین میتواند دقت اندازهگیریهای موقعیتیابی داخلی یک پلت فرم سیار را بهبود بخشد. علاوه بر این، نتایج تحقیقات این مقاله می تواند به عنوان معیار موقعیت یابی مطلق برای فناوری SLAM و VO مورد استفاده قرار گیرد که می تواند به موقعیت یابی مطلق دست یابد و با کمک ویژگی های طبیعی، تهیه گرافیک کدگذاری شده را بسیار کاهش دهد. علاوه بر این، با حل مشکل موقعیتیابی، میتوانیم اطلاعات محیطی را در زمان واقعی بدست آوریم که میتواند نجات اضطراری فضاهای داخلی و زیرزمینی و جمعآوری دادههای صحنه واقعی سه بعدی را تسهیل کند. آماده سازی گرافیک کدگذاری شده را بسیار کاهش می دهد. علاوه بر این، با حل مشکل موقعیتیابی، میتوانیم اطلاعات محیطی را در زمان واقعی بدست آوریم که میتواند نجات اضطراری فضاهای داخلی و زیرزمینی و جمعآوری دادههای صحنه واقعی سه بعدی را تسهیل کند. آماده سازی گرافیک کدگذاری شده را بسیار کاهش می دهد. علاوه بر این، با حل مشکل موقعیتیابی، میتوانیم اطلاعات محیطی را در زمان واقعی بدست آوریم که میتواند نجات اضطراری فضاهای داخلی و زیرزمینی و جمعآوری دادههای صحنه واقعی سه بعدی را تسهیل کند.
با این حال، به منظور حل خرابی های موقعیت یابی بصری ناشی از بافت پراکنده، تغییرات نور و سایر عوامل، روش موقعیت یابی داخلی پیشنهاد شده در این مقاله را می توان در سیستم ناوبری اینرسی (INS) و راه حل های مبتنی بر سیگنال بی سیم در آینده ادغام کرد. . در انجام این کار، این روش می تواند محلی سازی و ناوبری یکپارچه داخلی و خارجی مداوم را فراهم کند.












بدون دیدگاه