

خلاصه
در زمینه شهرهای هوشمند و دوقلوهای دیجیتالی، مدلهای سه بعدی شهر معنایی به طور فزایندهای برای تحلیل مناطق بزرگ شهری استفاده میشوند. در حالی که بازنمایی ساختمانها، زمین و پوشش گیاهی برای اکثر مدلهای شهر استاندارد شده است، بازنماییهای فضایی- معنایی دقیق فضای خیابانها تا کنون نقشی جزئی داشته است. این اکنون در حال تغییر است (1) به دلیل در دسترس بودن داده ها، و (2) زیرا برنامه های کاربردی اخیر و در حال ظهور نیاز به داشتن داده های دقیق در مورد فضای خیابان دارند. نسخه آتی 3.0 استاندارد بین المللی CityGML یک مدل داده به طور قابل توجهی به روز شده در مورد زیرساخت های حمل و نقل، از جمله نمایش فضای خیابان ارائه می دهد. با این حال، در حال حاضر تعدادی استاندارد دیگر و قالبهای داده وجود دارد که با نمایش و تبادل دادههای فضای خیابان سروکار دارند. بنابراین، بر اساس بررسی ادبیات گسترده کاربردهای بالقوه و همچنین بحثها و همکاریها با ذینفعان مربوطه، هفت جنبه مدلسازی کلیدی مدلهای دقیق فضای خیابان شناسایی میشوند. این اجازه می دهد تا یک بحث ساختاریافته در مورد قابلیت های بازنمایی مدل پیشنهادی حمل و نقل CityGML3.0 با توجه به این جنبه ها و در مقایسه با سایر استانداردها انجام شود. پس از آن، نشان داده شده است که CityGML3.0 بیشتر این جنبه ها را برآورده می کند و مدل های فضای خیابان را می توان از منابع داده های مختلف و برای شهرهای مختلف استخراج کرد. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است. بر اساس بررسی ادبیات گسترده کاربردهای بالقوه و همچنین بحثها و همکاریها با ذینفعان مربوطه، هفت جنبه مدلسازی کلیدی مدلهای دقیق فضای خیابان شناسایی میشوند. این اجازه می دهد تا یک بحث ساختاریافته در مورد قابلیت های بازنمایی مدل پیشنهادی حمل و نقل CityGML3.0 با توجه به این جنبه ها و در مقایسه با سایر استانداردها انجام شود. پس از آن، نشان داده شده است که CityGML3.0 بیشتر این جنبه ها را برآورده می کند و مدل های فضای خیابان را می توان از منابع داده های مختلف و برای شهرهای مختلف استخراج کرد. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است. بر اساس بررسی ادبیات گسترده کاربردهای بالقوه و همچنین بحثها و همکاریها با ذینفعان مربوطه، هفت جنبه مدلسازی کلیدی مدلهای دقیق فضای خیابان شناسایی میشوند. این اجازه می دهد تا یک بحث ساختاریافته در مورد قابلیت های بازنمایی مدل پیشنهادی حمل و نقل CityGML3.0 با توجه به این جنبه ها و در مقایسه با سایر استانداردها انجام شود. پس از آن، نشان داده شده است که CityGML3.0 بیشتر این جنبه ها را برآورده می کند و مدل های فضای خیابان را می توان از منابع داده های مختلف و برای شهرهای مختلف استخراج کرد. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است. هفت جنبه مدلسازی کلیدی مدلهای دقیق فضای خیابان شناسایی شدهاند. این اجازه می دهد تا یک بحث ساختاریافته در مورد قابلیت های بازنمایی مدل پیشنهادی حمل و نقل CityGML3.0 با توجه به این جنبه ها و در مقایسه با سایر استانداردها انجام شود. پس از آن، نشان داده شده است که CityGML3.0 بیشتر این جنبه ها را برآورده می کند و مدل های فضای خیابان را می توان از منابع داده های مختلف و برای شهرهای مختلف استخراج کرد. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است. هفت جنبه مدلسازی کلیدی مدلهای دقیق فضای خیابان شناسایی شدهاند. این اجازه می دهد تا یک بحث ساختاریافته در مورد قابلیت های بازنمایی مدل پیشنهادی حمل و نقل CityGML3.0 با توجه به این جنبه ها و در مقایسه با سایر استانداردها انجام شود. پس از آن، نشان داده شده است که CityGML3.0 بیشتر این جنبه ها را برآورده می کند و مدل های فضای خیابان را می توان از منابع داده های مختلف و برای شهرهای مختلف استخراج کرد. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است. 0 مدل حمل و نقل با توجه به این جنبه ها و در مقایسه با سایر استانداردها. پس از آن، نشان داده شده است که CityGML3.0 بیشتر این جنبه ها را برآورده می کند و مدل های فضای خیابان را می توان از منابع داده های مختلف و برای شهرهای مختلف استخراج کرد. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است. 0 مدل حمل و نقل با توجه به این جنبه ها و در مقایسه با سایر استانداردها. پس از آن، نشان داده شده است که CityGML3.0 بیشتر این جنبه ها را برآورده می کند و مدل های فضای خیابان را می توان از منابع داده های مختلف و برای شهرهای مختلف استخراج کرد. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است. مدل های تولید شده مطابق با استاندارد CityGML بلافاصله برای تعدادی از برنامه ها قابل استفاده هستند. این برای برخی از کاربردها، مانند مدیریت کاربری زمین، تجزیه و تحلیل پتانسیل خورشیدی، و ترافیک و شبیه سازی عابر پیاده نشان داده شده است.
کلید واژه ها:
CityGML 3.0 ; مدل های سه بعدی شهر ; فضای خیابان ؛ جاده ها ؛ حمل و نقل ; استانداردهای مدلسازی جاده ; شبیه سازی ترافیک
1. معرفی
مدلهای شهر سه بعدی معنایی اغلب به عنوان پایه و اساس طیف وسیعی از تحلیلها و شبیهسازیها عمل میکنند [ 1 ، 2 ]. اکثریت قریب به اتفاق مدلهای شهری موجود امروزه بر روی مدلهای ساختمان و زمین تمرکز دارند. فناوریهای جدید، مانند رانندگی خودکار، در ترکیب با روشهای ثبت دادهها، از جمله سیستمهای نقشهبرداری سیار، شروع به تغییر این تمرکز بر روی مدلهای دقیق فضای خیابان کردهاند. اینها تحولات اخیر است. بنابراین، دستورالعملهای بسیار کمی در مورد نمایش دقیق جادهها و فضاهای خیابانی در مدلهای شهر وجود دارد، چه رسد به اجرای واقعی. این مقاله تحقیقات گسترده ای را در مورد نتایج اولیه منتشر شده در Beil and Kolbe ارائه می کند [ 3] با مفاهیم تجدید نظر شده، شرح گردش کار دقیق، و نتایج جدید. در ادامه یک پروژه مطالعاتی انجام شده در کرسی ژئوانفورماتیک دانشگاه فنی مونیخ [ 4 ]، این کار رویکردهای مختلف را برای تولید دقیق اشیاء فضای خیابانی در مدلهای معنایی شهر سه بعدی عمدتاً بر اساس دادههای باز و مطابق با بسط بررسی میکند. استاندارد CityGML در حالی که کوتزنر و همکاران. [ 5 ] بسیاری از جنبه های نسخه بعدی 3.0 استاندارد بین المللی OGC CityGML را ارائه کرد، در این مقاله، ماژول حمل و نقل اصلاح شده مورد بحث قرار می گیرد.
روش تحقیق زیر کاربردی است. ابتدا، ما کاربردهای بالقوه را برای مدلهای دقیق فضای خیابان بررسی کردیم و استانداردهای مربوطه را ارزیابی کردیم. این استانداردها به منظور شناسایی رویکردهای مدلسازی مختلف و ارائه اطلاعات پسزمینه برای ارزیابی کاستیهای بالقوه، دستهبندی و مقایسه میشوند. سپس، بر اساس یک بررسی گسترده ادبیات و همچنین بر اساس تجربیات تعدادی از پروژهها و همکاری با سهامداران از آژانسهای نقشهبرداری، محیط زیست و برنامهریزی، شرکتهای شبیهسازی، شهرداریها و شرکتهای صنعت خودرو، جنبههای مدلسازی برای مدلهای دقیق فضای خیابان ارائه میشود. شناخته شده است. نویسندگان سپس مفاهیم مدل حمل و نقل CityGML3.0 جدید را با توجه به توانایی آن برای برآورده کردن مقولات ارائه شده مورد بحث قرار می دهند. علاوه بر این،
مقاله به شرح زیر است: پس از مشخص کردن اصطلاح “مدل سازی فضای خیابان” در بخش 2 ، بخش 3 شامل دسته بندی، معرفی و ارزیابی چندین استاندارد مرتبط در زمینه مدل سازی فضای خیابان است. اکثر استانداردهای موجود بر نمایش خطی یا پارامتریک جاده ها تمرکز دارند. این منجر به مشکلاتی می شود، زمانی که مدل های منطقه ای دقیق و دقیق از فضاهای خیابان مورد نیاز است. بررسی ادبیات گسترده ای که کاربردها و الزامات آنها را برای مدل های دقیق فضای خیابان توصیف می کند در بخش 4 ارائه شده است . بر اساس مقوله های نیازمندی های خاص برنامه و با توجه به مفاهیم ارائه شده در سایر استانداردها، مدل حمل و نقل CityGML3.0 در بخش 5 مورد بحث قرار گرفته است. .بخش 6 شامل نمونه هایی برای مدل های دقیق فضای خیابان است. نشان داده شده است که بر اساس منابع داده های مختلف از شهرهای مختلف در سراسر جهان، مدل های دقیق فضای خیابان را می توان مطابق با مفاهیم استاندارد CityGML3.0 تولید کرد. از آنجایی که این مدل ها بر اساس این استاندارد تولید می شوند، به طور مستقیم برای تعدادی از برنامه ها قابل استفاده هستند. در بخش 7 ، کاربردهایی مانند تحلیل پتانسیل خورشیدی، مدیریت زیرساخت، و تجسم شبیهسازیهای ترافیک، برای برخی از مدلهای فضای خیابانی تولید شده نشان داده شدهاند.
2. مدلسازی فضای خیابان
سیستمهای حملونقل، به ویژه در شهرهای بزرگ، نه تنها شامل خیابانها میشوند، بلکه شامل سایر زیرساختهای حملونقل مانند راهآهن، تراموا یا آبراهها و کانالها میشوند. این نوع حمل و نقل چندوجهی اغلب با یکدیگر تعامل دارند و حتی در بسیاری از موارد فضاهای یکسانی را در شهر به اشتراک می گذارند. 6]]. به عنوان مثال، تقاطع های همسطح خیابان ها و راه آهن یا تراموا در داخل یک جاده، بخشی از فضای خیابان هستند. بنابراین، ایجاد بازنماییهای فضایی- معنایی غیر زائد منسجم از فضای حملونقل شهری چالش برانگیز است. این به مفاهیم و همچنین مدل های داده مربوطه نیاز دارد تا فضای خیابان های دنیای واقعی را به اشیاء جداگانه تقسیم کند. مدلهای فضای خیابان را نیز میتوان بسته به نیازهای خاص برنامه طبقهبندی کرد. در حالی که برای برخی از کاربردها، یک نمایش هندسی صرف ممکن است کافی باشد، برخی دیگر نیز به اطلاعات معنایی دقیق تکیه می کنند تا بتوانند اشیاء فضای خیابان را تشخیص دهند. اهمیت مدلسازی روابط توپولوژیکی یا ظاهر بصری نیز متفاوت است. همه این جنبه ها را می توان در سطوح مختلف دقت و جزئیات مدل کرد. برنامه های کاربردی،7 ، 8 ]، در حالی که شبیه سازهای آموزش راننده ممکن است بیشتر بر روی تجسم های بسیار دقیق تمرکز کنند [ 9 ]. علاوه بر این، فضای خیابان را می توان (کاملاً تحت اللفظی) به عنوان «فضای بالای یک خیابان» که در آن جابجایی اتومبیل ها، عابران پیاده و سایر اعضای ترافیک انجام می شود، تفسیر کرد [ 10 ].
در حالی که مفاهیمی برای مدلسازی دقیق فضای خیابان در چارچوب مدلهای شهر سه بعدی وجود دارد (برای مثال CityGML2.0 شامل یک مدل حملونقل میشود)، این مفاهیم به اندازه کافی برای برآورده کردن الزامات مدلسازی برنامههای جدید، مانند آزمایش عملی مستقل نیستند. سیستم های رانندگی همچنین استانداردهایی از حوزههای دیگر با رویکردهای مختلف برای مدلسازی فضای خیابان، بسته به کاربرد مورد نظر، موجود است [ 3 ، 11 ، 12 ، 13 ، 14.]. بررسی این استانداردها به دلایل متعددی مرتبط است. اول، محصولات نرم افزاری و مجموعه داده های موجود برای فرمت های رایج مانند GDF و OpenDRIVE موجود است. دوم، استانداردهای تثبیت شده همچنین دانش را بر چگونگی برآوردن الزامات برنامه های کاربردی در حوزه مورد نظر خود متمرکز می کنند.
3. استانداردها و فرمت های داده مربوطه
این بخش استانداردها، قالبهای داده و دستورالعملهای مربوط به امکان نمایش فضای خیابان را در انواع مختلف مدلها بررسی و مقایسه میکند. این استانداردها بر اساس هدف اصلی آنها دسته بندی می شوند زیرا این امر به طور کلی بر رویکرد مدل سازی آنها تأثیر گذاشته است. استانداردها و فرمت های داده مربوط به برنامه ریزی و طراحی شهری و زیرساختی شامل کلاس های LandInfra و Industry Foundation (IFC) است و عمدتاً توسط برنامه ریزان و مهندسان عمران استفاده می شود. از طرف دیگر OpenDRIVE، GDF، RoadXML و Vissim متناسب با نیازهای برنامههای کاربردی خودرو، مانند ناوبری یا شبیهسازی ترافیک، طراحی شدهاند. INSPIRE، OSM، و CityGML استانداردهایی هستند که برای مدلسازی و نقشهبرداری دیجیتال منظره استفاده میشوند، در حالی که OKSTRA یک فرمت تبادل آلمانی است که برای مدیریت تسهیلات و دارایی در بافت خیابانها استفاده میشود. چارچوب های به کار گرفته شده و جنبه های کلیدی هر استاندارد خلاصه شده و سپس با توجه به طبقه بندی آنها و با توجه به رویکردهای مدل سازی مربوطه مقایسه می شوند. ارزیابی تمام استانداردها در انجام می شودبخش 3.5 و در جدول 1 خلاصه شده است .
3.1. استانداردها و فرمت های داده مورد استفاده برای برنامه ریزی و طراحی شهری و زیرساخت
استاندارد OGC “استاندارد مدل مفهومی زمین و زیرساخت” (LandInfra ) مفاهیمی را برای ارائه و درک اطلاعات در مورد زمین و زیرساخت مهندسی عمران تعریف می کند [ 15 ]. این استاندارد بر اساس استانداردهای اطلاعات جغرافیایی سری ISO 19100 است. حوزه های موضوعی مختلفی را پوشش می دهد که توسط کلاس های به اصطلاح نیازمندی تعریف شده اند. مرتبط ترین ها از نظر مدل سازی خیابان ، تراز و جاده هستند . با این حال، LandInfra یک استاندارد جدید است و هنوز به طور گسترده مورد استفاده قرار نگرفته است.
فرمت داده مدل سازی اطلاعات ساختمان (BIM) کلاس های بنیاد صنعتی (IFC) [ 16 ] یک توصیف دیجیتالی از اشیاء ساخته شده، به عنوان مثال، ساخته دست بشر است. آخرین نسخه استاندارد کاندید IFC4.3 است. از آنجایی که IFC4.3 هنوز به طور رسمی منتشر نشده است، استاندارد در جدول 1 گنجانده نشده است .
هر دو استاندارد از مفهوم تراز برای توصیف خیابان ها با یک نمایش خطی با استفاده از توصیفات پارامتریک برای نمایش گستره فضایی آنها استفاده می کنند. Alignment در LandInfra به عنوان یک عنصر موقعیت یابی تعریف می شود که یک سیستم مرجع خطی برای مکان یابی عناصر فیزیکی ارائه می دهد . می توان آن را به روش های مختلفی مانند تراز افقی، عمودی یا سه بعدی تعریف کرد. برای جاده ها، معمولاً یک تراز برای خط مرکزی وجود دارد . برای جادههای دوگانه، ترازهای جداگانه باید در نظر گرفته شود. با این حال، آنها همچنین ممکن است یک تراز افقی مرجع در مرکز تقریبی کل جاده به اشتراک بگذارند. بر اساس روش ارجاع خطی (LRM)، مکان ها در امتداد ترازرا می توان به عنوان مکان های مرجع خطی تعریف کرد. مقادیر DistanceAlong و offsetLateral-Distance باید در صفحه افقی اندازه گیری شوند و در صورت استفاده از Alignment به عنوان یک عنصر خطی، از هرگونه جابجایی عمودی چشم پوشی شود. مقادیر OffsetVerticalDistance را می توان در نظر گرفت. از سوی دیگر IFC شامل یک به اصطلاح IFCAlignment استمفهومی برای تعریف یک سیستم مرجع برای سازه های خطی ساخت و ساز، مانند جاده ها یا ریل ها. این ممکن است شامل یک تراز افقی تعریف شده در صفحه x/y همراه با یک تراز عمودی تعریف شده در امتداد خط مرجع افقی باشد. این بسیار شبیه به مفاهیم ارائه شده در LandInfra است. در واقع، مفهوم تراز به طور مشترک برای LandInfra و IFC توسعه یافته است. در حالی که پروژههایی مانند IFCRail ، IFCTunnel و IFCRoad برنامهریزی شدهاند تا مدل دادههای نسخه بعدی IFC را به زیرساختهای مختلف گسترش دهند، LandInfra از قبل حاوی مفاهیمی برای مدلسازی جادهها است. کلاس جاده در LandInfra گزینه های متعددی را برای نمایش طراحی جاده ارائه می دهد، مانند عناصر جاده ،خطوط ریسمان سه بعدی (~نمایش نمایه)، مقاطع عرضی دوبعدی ، و سطوح و لایه های سه بعدی . عناصر جاده می توانند انواع مختلفی را شامل شوند، مانند پیاده رو، پیاده رو، یا حاشیه، که با مشخصه ای به نام RoadElementType تعریف می شوند . چندین عنصر جاده را می توان با هم به عنوان RoadElementSet گروه بندی کرد . RoadElements را می توان به صورت اختیاری با یک نمایش فضایی یا یک مکان مرجع خطی به صورت فیزیکی قرار داد. یک شبکه نامنظم مثلثی (TIN) می تواند سطح یک جاده را نشان دهد. جاود و همکاران [ 17] به مسائل IFC در مورد ارجاع جغرافیایی بپردازد. این همچنین برای پروژههای زیرساختی بزرگ (مانند جادهها یا تونلها، که باید انحنای زمین را در نظر بگیرند) که اغلب در سیستمهای مرجع مختصات سفارشی نشان داده میشوند، مرتبط است. از سوی دیگر، LandInfra مفاهیمی را از سایر استانداردهای OGC و ISO TC211، از جمله سیستم های مرجع مختصات، به ارمغان می آورد.
3.2. استانداردها و فرمت های داده مورد استفاده برای کاربردهای خودرو
فایلهای دادههای جغرافیایی (GDF) یک استاندارد ISO است که عمدتاً در ناوبری وسایل نقلیه برای تبادل نقشههای دیجیتال بین سازندگان نقشه و یکپارچهکنندههای سیستم ناوبری استفاده میشود. علاوه بر این، GDF قوانین متعددی را برای جمعآوری و نمایش دادهها در مورد بسیاری از اشیاء فضای خیابان ارائه میکند. مشخصات فعلی GDF5.0 در سال 2011 توسط ISO منتشر شد و به چندین بخش تقسیم شده است [ 18 ].
OpenDRIVE یک فرمت داده باز است که در اصل توسط VIRES Simulationstechnologie GmbH برای توصیف شبکه های خیابانی توسعه یافته است و معمولاً برای شبیه سازی رانندگی توسط سازندگان خودرو از جمله BMW، AUDI و Daimler استفاده می شود [ 7 ]. مدیریت استاندارد در سال 2018 به انجمن استانداردسازی سیستمهای اتوماسیون و اندازهگیری (ASAM) منتقل شد . مشخصات فرمت فعلی، نسخه. 1.6، در سال 2020 منتشر شد [ 19 ].
مشابه OpenDRIVE، RoadXML قالبی است که در ابتدا برای شبیه سازهای رانندگی طراحی شده است. فضای ترافیک در چندین لایه داده، از جمله داده های ترافیک، داده های سطحی، داده های توپولوژیک، داده های صوتی و داده های کاربر سازماندهی شده است. در مقابل OpenDRIVE، دایره کاربران فعال RoadXML نسبتاً محدود است. نسخه 3.0.0 RoadXML در سال 2020 منتشر شد [ 20 ].
Vissim یک ابزار نرم افزاری و قالب داده برای انجام شبیه سازی های ترافیکی چند منظوره مبتنی بر رفتار میکروسکوپی برای تجزیه و تحلیل و بهینه سازی جریان های ترافیک است [ 21 ]. Vissim یکی از پرکاربردترین نرمافزارهای شبیهسازی ترافیک چندوجهی است و میتوان آن را برای برنامهریزی سناریوهای مختلف ترافیکی یا کنترل چراغ راهنمایی استفاده کرد. اعضای بالقوه ترافیک شامل اتومبیل ها، اتوبوس ها، کامیون ها، دوچرخه ها، عابران پیاده یا تراموا هستند. Ruhdorfer [ 22 ] مدل ترافیک Vissim را به تفصیل توضیح داد.
همه استانداردها بر اساس نمایش خطی خیابان ها هستند. در حالی که GDF و Vissim فقط استفاده از بخشهای خط مستقیم را مجاز میدانند، OpenDRIVE و RoadXML از خط مرجعی استفاده میکنند که به عنوان دنبالهای از موارد اولیه هندسی توصیف میشود، مانند پارههای خط مستقیم، منحنیهای مارپیچی، چندجملهای مکعبی و منحنیهای مکعبی پارامتریک. در امتداد این خط مرجع، انواع ویژگی های جاده، مانند مشخصات ارتفاع، علائم راهنمایی و رانندگی، یا خطوط را می توان تعریف کرد. همه استانداردها همچنین دارای مکانیسم های پیوندی برای توصیف روابط توپولوژیکی هستند تا امکان ناوبری از طریق یک شبکه جاده ای را فراهم کنند. استانداردها از توصیف پارامتریک خطوط نسبت به خط مرجع استفاده می کنند. در حالی که GDF از نمایشهای خطی شبکههای جادهای در سطوح مختلف پیچیدگی استفاده میکند، هندسههای منطقهای را میتوان برای توصیف مناطقی با حرکتهای ترافیکی بدون ساختار استفاده کرد. مانند پارکینگ. OpenDRIVE شامل پارامترهایی در هر خط برای «کد مواد سطح»، «زبری» و «اصطکاک» است. شبکههای جادهای ممکن است با استفاده از تعریف طرحبندی که بهعنوان رشته «proj4» قالببندی شده است، ارجاع داده شوند. برای توصیف سطح، استاندارد به صراحت به سند دیگری به نام OpenCRG اشاره می کند. در اینجا، سطوح جاده با استفاده از یک شبکه منظم منحنی (CRG) که دادههای ارتفاع جاده را در مجاورت یک خط مرجع تجسم میکند، نشان داده میشود.23 ، 24 ]. Vissim اجازه می دهد تا هندسه های منطقه را از اطلاعات عرض خیابان استخراج کنید. علاوه بر این، مدلهای گرافیکی سهبعدی، مانند دادههای SketchUp یا Autodesk DWG، میتوانند به منظور دستیابی به تجسمهای دقیق از نتایج شبیهسازی یکپارچه شوند. همه استانداردها شامل مفاهیمی برای مدلسازی منطق ترافیک و یک سیستم مرجع خطی هستند. GDF و Vissim امکان نمایش چندین نوع حملونقل را میدهند، در حالی که OpenDRIVE و RoadXML بر نمایش جادههای مورد استفاده توسط خودروها تمرکز میکنند. راهآهنها را میتوان در OpenDRIVE نشان داد، اما فقط در زمینه یک خیابان مجاور. برای توصیف تعاملات پویا اعضای ترافیک، مانند مانورهای سبقت گرفتن، OpenDRIVE به OpenScenario استاندارد مربوطه اشاره می کند [ 25 ].
3.3. استانداردها و فرمتهای داده مورد استفاده برای مدلسازی و نقشهبرداری دیجیتال منظر
مشخصات دادههای INSPIRE در شبکههای حملونقل با هدف قابلیت همکاری دادههای مکانی و خدمات از منابع مختلف در سراسر جامعه اروپایی است [ 26]]. در مورد حمل و نقل، INSPIRE در نظر دارد چارچوبی برای یک شبکه حمل و نقل یکپارچه و ویژگی های مرتبط ایجاد کند که در سراسر مرزهای بین المللی یکپارچه باشد. مدل شبکه عمومی INSPIRE (GNM) بر استانداردهای اطلاعات جغرافیایی سری ISO 19100 متکی است. این شامل یک مکانیسم اتصال شبکه برای ایجاد اتصال بین مرزی و اتصالات بین وجهی، ارجاع اشیا برای پشتیبانی از استفاده مجدد از اطلاعات و اجتناب از نمایش های اضافی و یک سیستم ارجاع خطی است. انواع اشیاء فضایی در یک کاتالوگ ویژگی تعریف میشوند و ویژگیها در فهرست کدها برشمرده میشوند. مشخصات داده ها همه انواع شبکه حمل و نقل اصلی، از جمله جاده، راه آهن، آب، حمل و نقل هوایی و کابلی را پوشش می دهد. عناصر در شبکه به عنوان گره ها، پیوندها، پیوندهای انبوه، مناطق، و امتیاز و می تواند اعتبار زمانی داشته باشد. گره ها تنها در صورتی نشان داده می شوند که تقاطع بین پیوندها در دنیای واقعی وجود داشته باشد. توپولوژی به طور صریح در مشخصات داده ها مدیریت نمی شود. با این حال، بیان شده است که داده های ارائه شده باید برای بازسازی روابط توپولوژیکی مناسب باشند.
OpenStreetMap (OSM) یک پروژه اجتماعی است که نقشه های تولید شده توسط کاربر را برای مشاهده وب و دانلود فراهم می کند [ 27 ]. ویژگی های نقشه تعریف شده در صفحه اصلی پروژه ( https://wiki.openstreetmap.org/wiki/Main_Page) به اصطلاح با کلید مشخص می شوند. اینها عبارتند از “بزرگراه = *” که برای هر نوع جاده، خیابان یا مسیر استفاده می شود. یک مقدار مشخصه اختصاص داده شده بیشتر اهمیت هر بزرگراه را در شبکه جاده نشان می دهد. ویژگیهای بالقوه بزرگراه شامل جادههای اولیه، ثانویه یا سوم و همچنین بزرگراهها و دیگر انواع جادهها است. داده های OSM بیشتر برای تهیه نقشه و گاهی اوقات برای برنامه های ناوبری استفاده می شود. در حالی که مفهوم مرجع خطی OpenStreetMap (OSMLR) برای ارائه ارجاع خطی به داده های جاده OSM توسعه یافته است، این مفهوم به طور پیش فرض استفاده نمی شود. دادههای OpenStreetMap دادههای باز تولید شده توسط کاربر هستند، بنابراین دقت و در دسترس بودن میتواند به شدت بسته به مکان متفاوت باشد [ 28 ].
زبان نشانه گذاری جغرافیای شهر (CityGML) یک مدل داده باز و قالب مبتنی بر XML برای نمایش، ذخیره و مبادله مدل های شهری و منظره سه بعدی معنایی است. کنسرسیوم فضایی باز (OGC) استاندارد فعلی CityGML 2.0 را در سال 2012 صادر کرد [ 29 ]. این کلاس ها و روابط متعددی را برای بسیاری از اشیاء موضوعی شهر با توجه به ویژگی های فضایی، معنایی و ظاهری آنها تعریف می کند. تمام اشیاء شهر را می توان در پنج سطح متوالی از جزئیات (LoD) نشان داد. مرتبط ترین مدل موضوعی در زمینه بازنمایی فضای خیابان، «مدل حمل و نقل» است. از کلاس اصلی TransportationComplex تشکیل شده است و می تواند به صورت موضوعی در چهار زیر کلاس به نام های جاده ، مربع ، مسیر تخصصی شود.، و راه آهن . ویژگی های حمل و نقل را می توان به صورت شبکه های خطی در LoD0 نشان داد. با شروع از LoD1، اشیاء حمل و نقل به صورت فضایی توسط MultiSurfaces نشان داده می شوند. نمایشهای LoD2-LoD4 امکان تجزیه معنایی بیشتر را به TrafficAreas (مثلاً خطوط رانندگی یا پیادهروها) و اشیایی که مستقیماً برای حرکت وسیله نقلیه یا عابر پیاده استفاده نمیشوند را به نام AuxiliaryTrafficAreas میدهد.(به عنوان مثال، خطوط میانی، سنگ های حاشیه، یا فضای سبز). مقادیر مشخصه برای ویژگیهایی مانند کلاس، تابع یا استفاده با استفاده از لیست کدهایی که ورودیهای ممکن خاص را شمارش میکنند، تعریف میشوند. CityGML در سرتاسر جهان برای نمایش و مبادله مدل های سه بعدی شهر استفاده می شود. تا به حال، CityGML بیشتر برای نشان دادن مدلهای ساختمانها، زمین یا گاهی اوقات پلها و تونلها استفاده میشده است. اخیراً اولین مدلهای فضای خیابان CityGML ایجاد شده است [ 3 ].
در حالی که INSPIRE و CityGML حاوی مفاهیمی برای نمایش خطی و همچنین نمایش منطقه ای از فضای خیابان هستند، OSM فقط هندسه های خطی را مجاز می کند. پیشنهادهایی برای مدلسازی منطقهای خیابانها وجود دارد ( https://wiki.openstreetmap.org/wiki/Proposed_features/Street_area) در OSM. بر خلاف استانداردهای مورد استفاده برای کاربردهای خودرو، هندسه های خطی را تنها می توان با استفاده از خطوط مستقیم برای هر یک از استانداردها نشان داد. همه استانداردها شامل چندین نوع حمل و نقل مانند راهآهن، آبراه، مسیرهای پیادهروی یا خطوط دوچرخهسواری هستند که عمدتاً با استفاده از ویژگیهای مربوطه نشان داده میشوند. با این حال، در مورد OSM، این اطلاعات اغلب در دسترس نیست. در حالی که INSPIRE یک مکانیسم پیوندی برای شبکه های حمل و نقل چندوجهی ارائه می دهد، OSM و CityGML2.0 مفاهیمی برای بیان چنین روابطی ندارند.
3.4. استاندارد مورد استفاده برای مدیریت تسهیلات و دارایی
‘Anweisung Straßeninformationsbank’ (ASB) و ‘Objekt¬katalog für das Straßen-und Verkehrswesen’ (OKSTRA )، منتشر شده توسط وزارت حمل و نقل فدرال و زیرساخت دیجیتال آلمان، کاتالوگ های استاندارد شده ای برای ضبط یکنواخت، دستکاری و ارائه خیابان هستند. ویژگی های شی [ 30 ]. ASB ساختارهای شی را از منظر فنی توصیف میکند، در حالی که OKSTRA بر توصیفهای رسمی با استفاده از طرحوارههای داده و نمایشهای UML از اشیاء فضای خیابان تمرکز میکند [ 31 ]. این مدل بر اساس چندین استاندارد ISO، از جمله ISO 19107 [ 32 ] و ISO 19109 [ 33] است.]. ASB و OKSTRA توسط ادارات آلمان برای جمع آوری و ذخیره اطلاعات یکسان در خیابان های عمومی و زیرساخت های ترافیکی استفاده می شود. این مفهوم با استفاده از تعاریف ارائه شده در ASB توصیف شده است. ابتدا، انواع خیابان هایی که باید شامل شوند مشخص می شوند. یک نمایش خطی برای نشان دادن مفهوم مدلسازی توصیفشده استفاده میشود. هر خیابان به چند بخش تقسیم می شود که هر بخش توسط دو گره منحصر به فرد محدود شده است. هر بخش یک سیستم ایستگاهی را به ارث می برد که از گره اول شروع می شود و به گره دوم ختم می شود. یک گره می تواند از چندین شاخه کوچکتر مانند رمپ ها یا راهروهایی که بخش های مختلف را به هم متصل می کنند، تشکیل شود. این استاندارد با ارائه مثالهای مفصل متعدد، که دوباره از طریق نمایشهای خط و گره نشان داده شدهاند، در مورد نحوه نمایش سناریوهای مختلف فضای خیابان ادامه مییابد. اینها از جمله تقاطع ها در سطوح مختلف پیچیدگی، دوربرگردان ها، پل ها و روگذرها هستند. در حالی که می توان اشیاء را با نمایش های منطقه ای مدل کرد، خیابان ها معمولاً با ساختارهای خطی نشان داده می شوند.
3.5. ارزیابی
در حالی که استانداردها تاکنون در دسته خود مقایسه شدهاند، همه استانداردها اکنون در رابطه با رویکردهای مدلسازی مختلف، از جمله هندسههای موجود، اطلاعات معنایی، مفاهیم توپولوژیکی، و امکانات برای تجسم ارزیابی میشوند. این در جدول 1 خلاصه شده است . علاوه بر این، مفاهیم اضافی موجود در CityGML3.0 نیز نشان داده شده است. رنگهای موجود در هر سلول نشان میدهد که آیا یک دسته با استاندارد خاصی پوشش داده میشود یا خیر. سلول های سبز نشان می دهد که این ویژگی به طور کامل برای استاندارد خاص در دسترس است. ویژگیهایی که با سلولهای قرمز نمادین شدهاند در دسترس نیستند و سلولهای زرد نشاندهنده دسترسی محدود به ویژگی خاص است. هر سلول زرد با یک حرف برچسب گذاری شده و بیشتر توضیح داده شده است. توضیحات دقیق تر در مورد هر سلول را می توان در یک صفحه ویکی مربوطه یافت (https://wiki.tum.de/display/gisstreetspacemodelling/Relevant+Standards ). GDF، OKSTRA، و ASB مقررات گسترده ای را برای تقسیم اشیاء فضای خیابان به دسته های مختلف ارائه می دهند. OpenDRIVE، ASB، و LandInfra راهحلهایی را برای مشکلاتی ارائه میکنند که در استاندارد کنونی CityGML مانند سیستمهای ارجاع خطی و ایستگاهسازی پرداخته نشدهاند. مشابه OpenDRIVE، RoadXML و Vissim بر جنبه های معنایی و توپولوژیکی تمرکز می کنند. گیلبرت و همکاران [ 34] مقایسه مفصلی از LandInfra، IFC و CityGML با توجه به تفاوتها در مفهومسازی، معناشناسی، سیستمهای مرجع هماهنگ، هندسهها و سایر جنبهها ارائه میکند و چالشهای مربوط به قابلیت همکاری نرمافزار و یکپارچهسازی دادهها را مورد بحث قرار میدهد. اکثر استانداردهای ارائه شده تنها بر نمایش خطی و پارامتریک خیابان ها تمرکز دارند. این میتواند منجر به مشکلاتی شود اگر به نمایش دقیق خیابانها و اشیاء فضای خیابان، همانطور که در شکل 1 نشان داده شده است، نیاز باشد .
در حالی که یک نمایش خطی معمولاً برای کاربردهایی مانند ناوبری، شبیهسازی ترافیک، یا نقشهبرداری نویز کافی است، یک مدل خیابان منطقهای اغلب برای نمایش جزئیات هندسی مانند ایستگاههای اتوبوس، تغییر نامنظم عرض خیابان یا علامتگذاری جاده مورد نیاز است. علاوه بر این، سطوح بزرگ مهر و موم شده مانند میدان ها یا پارکینگ ها باید به عنوان هندسه سطح مدل شوند. این می تواند برای تجسم یا تجزیه و تحلیل فضایی مفید باشد.
پارک و همکاران [ 35 ] نشان می دهد که چگونه اطلاعات دقیق منطقه ای در مورد طول، عرض یا شیب جاده ها برای محاسبه مسیرهای برف روبی بهینه ضروری است. استراسنبورگ-کلسیاک [ 36] مزایای احتمالی نمایش خیابانی منطقه ای در OSM را مورد بحث قرار داد. برخی از برنامه ها از تجسم دقیق فضای خیابان با استفاده از بافت ها و مدل های سه بعدی دقیق بهره می برند. اکثر استانداردهایی که با مدلسازی فضای خیابان سروکار دارند، امکان استخراج آسان تجسمهای سه بعدی را نمیدهند. یک نمایش سه بعدی منطقه ای از اشیاء فضای خیابان توسط همه استانداردها پشتیبانی نمی شود. جنبه های معنایی توسط اکثر استانداردهای ارائه شده پوشش داده شده است. تعجب آور نیست که استانداردهای طراحی شده برای شبیه سازی ترافیک/رانندگی یا اهداف ناوبری بر روی ویژگی های توپولوژیکی تمرکز دارند. ویژگیهای موضوعی اضافی، مانند تونلها، پلها، خطکشی جادهها، مبلمان شهری، و انواع ترافیکی متعدد (جاده، راهآهن، عابر پیاده و غیره)، میتوانند در زمینه روابط ترافیکی چندوجهی مهم باشند.
4. برنامه های کاربردی برای مدل های دقیق فضای خیابان
بخش زیر شامل بررسی ادبیات مفصلی در مورد کاربردهای احتمالی برای مدلهای فضای خیابانی سه بعدی با جزئیات (بدون ادعای کامل بودن) است. این برنامهها تعدادی الزامات مدلسازی مختلف را بر مدلهای فضای دقیق خیابان تحمیل میکنند تا قابل استفاده باشند. این الزامات ممکن است برای هر کاربرد بسیار خاص باشد (به عنوان مثال، “دقت موقعیت اجسام باید بهتر از 0.03 متر باشد”). فهرست کردن جزئیات این الزامات خارج از محدوده این مقاله خواهد بود. با این حال، مجموعه دادههای فضای خیابان فقط با دادههای موجود محدود نمیشوند، بلکه به واسطه چارچوبهای مدلسازی زیربنایی و کاستیهای مفهومی بالقوه استاندارد یا قالبی که دادهها در آن ارائه میشوند، نیز محدود نمیشوند. بنابراین، جنبههای مدلسازی بهطور کلی در بخش 4.2 طبقهبندی میشوند .. این اجازه می دهد تا بحث و مقایسه CityGML3.0 با استانداردها و مفاهیم دیگر با توجه به اینکه تا چه حد این جنبه ها را برآورده می کنند.
4.1. بررسی ادبیات در زمینه های بالقوه کاربرد
4.1.1. برنامه ریزی و مدیریت زیرساخت
مدلهای دیجیتال سه بعدی شهر میتوانند مبنایی برای مدیریت کاربری زمین باشند [ 37 ، 38 ]. علاوه بر مناطق مسکونی، منظره شهر عمدتاً توسط مناطق ترافیکی عمومی شکل می گیرد. شبیه سازی بصری مناطق ساخته شده و همچنین فضای آزاد را می توان به منظور برنامه ریزی سناریوهای مختلف و انجام تلاش و تحلیل هزینه استفاده کرد. در این زمینه، پروژه های ساختمانی بزرگ، مانند بخش های بزرگراه یا پل های جدید، می توانند به صورت دیجیتالی برنامه ریزی شوند. این همچنین می تواند برای تجسم نمای سه بعدی آینده این سازه ها و در نتیجه جلوگیری از مقاومت احتمالی شهروندان در برابر ساخت و سازهای برنامه ریزی شده استفاده شود. در این زمینه، مهم است که چقدر تلاش برای ایجاد تجسم دقیق از داده های ارائه شده در استانداردهای مختلف لازم است. دولنر و کلاینشمیت [ 39] و همچنین Bock et al. [ 40 ] نشان میدهد که مدلهای شهری سه بعدی مجازی میتوانند پایهای نوآورانه برای دسترسی به اطلاعات مکانی- معنایی پیچیده از نظر مدیریت کاربری پایدار زمین ایجاد کنند. بسیاری از جوامع وظیفه دارند به تعهدات شهرداری خود مانند پاکسازی خیابان ها از برف یا برگ ها عمل کنند. برنامه ریزی این وظایف اغلب پرهزینه به منظور یافتن موثرترین و مقرون به صرفه ترین پیاده سازی می تواند توسط مدل های دقیق فضای خیابان پشتیبانی شود [ 35]]. این شامل ابزارهای مسیریابی است که به اطلاعات توپولوژیکی در شبکه های خیابانی نیاز دارد. مدلهای خیابانی منطقهای همراه با دانش شرایط روسازی را میتوان برای ارزیابی هزینههای تعمیر مورد انتظار استفاده کرد. این همچنین شامل تعمیر و نگهداری خیابان ها و نقشه برداری آسیب است. نتایج نظارت بر سلامت سازه و تشخیص آسیب روسازی جادهها نیز میتواند به اشیاء فضایی منفرد در یک مدل شهر مرتبط شود. ژائو و همکاران [ 41 ] مزایای مدل های فضایی را در زمینه تخمین پارامترهای تخریب جاده نشان می دهد. کلبه و همکاران [ 42] نشان داد که چگونه می توان از CityGML و مدل های شهر معنایی برای برنامه ریزی اضطراری استفاده کرد. در ترکیب با دانش در مورد زیرساختهای شهری مدفون، مدلهای دقیق فضای خیابان را میتوان برای تعیین اینکه کدام بخش از جاده تحت تأثیر حفاریهای خیابان قرار میگیرد استفاده کرد [ 43 ]. اصطلاح “دوقلو دیجیتال” در ابتدا برای توصیف فیزیکی و عملکردی اجزاء، محصولات یا سیستمهای ماشینهای صنعتی، از جمله اطلاعات برای تمام مراحل چرخه حیات استفاده میشد [ 44 ]. این مفهوم را می توان به بافت برنامه ریزی شهری و شهرهای هوشمند منتقل کرد [ 45]. روشهایی برای مدیریت نسخه سازگار و تاریخگذاری مدلهای فضای خیابان برای این کاربردها ضروری است. دوقلوی دیجیتالی یک شهر را می توان به عنوان یک نمایش دیجیتال از نظر دارایی های فیزیکی آن، از جمله ساختمان ها، فضای خیابان، پوشش گیاهی و سایر اشیاء توصیف کرد [46 ] . مدلهای اشیاء دنیای واقعی، مانند خیابانها، غنیشده با اطلاعات پویا در زمان واقعی در مورد حجم ترافیک برای نتایج پخش کنونی یا شبیهسازی، میتوانند در فرآیندهای برنامهریزی یا مدیریت زیرساختهای حملونقل ادغام شوند.
4.1.2. برنامه های کاربردی خودرو
دانش در مورد شکل دقیق اشیاء فضای خیابان برای کاربردهای رانندگی خودمختار کلیدی است. شواب و کولب [ 7 ] الزامات کاربردی خاص مدل های فضای جاده را در زمینه توسعه رانندگی خودکار مورد بحث قرار می دهند. از یک طرف، آزمایشهای مجازی سیستمهای رانندگی خودکار، از جمله شبیهسازی حسگر، میتواند با استفاده از مدلهای فضای خیابان دیجیتال انجام شود. از سوی دیگر، اطلاعات موجود در مدل های دقیق فضای خیابان می تواند به عنوان “حقیقت زمینی” برای سیستم های رانندگی خودکار که سعی در درک محیط خود دارند استفاده شود. این همچنین به اطلاعاتی در مورد مناطق ترافیکی مورد استفاده سایر کاربران جاده مانند عابران پیاده، دوچرخه سواران یا تراموا نیاز دارد. شواب و همکاران [ 8] مفهومی را برای مدلسازی فضای جاده ارائه میکند تا شبیهساز رانندگی زیر میکروسکوپی “Test Drive” را با یک شبیهساز رفتار عابر پیاده برای آزمایش سیستمهای رانندگی خودکار ترکیب کند. در طی این فرآیند، مجموعه داده های OpenDRIVE به مجموعه داده های CityGML تبدیل شده و برای تولید یک سناریوی شبیه سازی عابر پیاده استفاده می شود. ریشتر و همکاران [ 47 ] الزامات توسعه و آزمایش سیستمهای رانندگی خودکار را با استفاده از مدلهای شهر مجازی و ترافیک تحلیل کرده و مفهومی برای چارچوب توسعه شهری یکپارچه پیشنهاد میکند. استراسنبورگ-کلسیاک [ 36] بیان کرد که می توان از اطلاعات مربوط به لبه های خیابان به منظور افزایش ایمنی رانندگی استفاده کرد. وسایل نقلیه متصل در ترکیب با داده های طول و عرض برخی از بخش های خیابان می توانند برای کمک به رانندگان در مانورهای سبقت استفاده شوند. رانت و همکاران [ 48 ] توضیح داد که چگونه می توان از مناظر سه بعدی مجازی برای شبیه سازهای رانندگی و آموزش راننده اضطراری استفاده کرد. پیگا و همکاران [ 9 ] نشان میدهد که سناریوی مشابهی که در سطوح مختلف جزئیات نشان داده شده است بر اعتبار تجربه رانندگی و در نتیجه رفتار رانندگی تأثیر میگذارد. کلر و همکاران [ 49] یک شبیه ساز دوچرخه، شامل تجسم سه بعدی از خیابان ها و تقاطع های دنیای واقعی ایجاد کرد. سایر شبیهسازیهای مرتبط با خودرو، مانند شبیهسازی ترافیک یا شبیهسازی دینامیک رانندگی، نیز میتوانند توسط اطلاعات به دست آمده از مدلهای دقیق فضای خیابان پشتیبانی شوند [ 14 ، 50 ، 51 ]. ویلکی و همکاران [ 52 ] روش هایی را در مورد چگونگی ایجاد یک مدل سه بعدی سازگار هندسی و توپولوژیکی از داده های GIS قابل استفاده برای شبیه سازی ترافیک نشان می دهد. بوئرسما [ 13] چندین مورد استفاده برای مدلهای جاده دیجیتال، از جمله مدلهای ترافیک، تعمیر و نگهداری و ناوبری را با بررسی نیازهای دادهای خاص با توجه به این سه کاربرد مورد بحث قرار داد. روابط توپولوژیکی اشیاء خیابان و خط به ویژه برای کاربردهای ناوبری و شبیه سازی ترافیک مهم است. چائو و همکاران [ 53 ] همچنین تکنیکهای مدلسازی جاده را در زمینه شبیهسازی ترافیک ارائه میکند. جادههایی که معمولاً برای خودروها ممنوع هستند، اما به اندازهای عریض هستند که آمبولانسها در مواقع اضطراری از آنها استفاده کنند، میتوانند در سیستمهای ناوبری ادغام شوند. در این زمینه، دانش در مورد پلهها، محدودیتها و غیره میتواند برای برنامهریزی مسیر بدون مانع در نظر گرفته شود تا به افراد دارای تحرک کم کمک کند [ 54 ].
4.1.3. شبیه سازی و تحلیل های محیطی
مدلهای سه بعدی فضای خیابانی دقیق میتوانند پایه و اساس انواع روشهای شبیهسازی و تحلیل محیطی باشند. جزایر حرارتی محلی در مناطق تا حد زیادی مهر و موم شده، مانند تقاطع خیابان ها یا میدان ها، می توانند با استفاده از اطلاعات به دست آمده از نمایش خیابان های منطقه در ترکیب با دانش تابش خورشیدی تجزیه و تحلیل شوند. قرارگیری بهینه علائم خیابان و چراغ های راهنمایی را می توان در مدل های شهری برنامه ریزی کرد و با تجزیه و تحلیل دید [ 1 ] پشتیبانی کرد. بسانی و همکاران [ 55 ] داده های GIS را برای تخمین فاصله دید موجود در یک جاده شهری معمولی ارزیابی کرد. غسون و همکاران [ 56 ] نشان می دهد که چگونه مدل های شهر می توانند برای تجزیه و تحلیل کیفیت هوا مفید باشند. ویلنبورگ و همکاران [ 2] نشان می دهد که چگونه می توان یک مدل شهر را برای شبیه سازی دینامیک سیالات محاسباتی (CFD) در زمینه شبیه سازی انفجار تبدیل کرد. یک رویکرد مشابه می تواند برای پیوند نتایج شبیه سازی ذرات معلق با فضاهای بالای مناطق ترافیکی اجرا شود. در این زمینه، اطلاعات پویا (به عنوان مثال، تغییر سطح آلودگی در طول روز) باید به اشیاء فضای خیابان مرتبط شود. ترکیب نتایج شبیهسازی کیفیت هوا (ذرات معلق) با اطلاعات مربوط به مناطق و فضاهایی که عابران پیاده تردد میکنند میتواند برای شناسایی مکانهای آسیبدیده بهویژه استفاده شود. تجسم آسان چنین نتایجی می تواند برای ارزیابی سریع و شهودی مهم باشد. پارامترهایی مانند تعداد خیابانهای متقاطع، عرض مربوط به آنها و زوایای بین بازوهای خیابان را میتوان از مدلهای دقیق فضای خیابان استخراج کرد.57 ]. در ترکیب با سایر بخشهای یک مدل شهر مانند ساختمانها و پوشش گیاهی، میتوان شبیهسازیهای بسیار دقیقی را انجام داد. بر اساس اطلاعات منطقه ای خیابان ها و مسیرهای پیاده روی، فضاهای خالی را می توان به راحتی مدل سازی کرد. اینها می توانند برای شبیه سازی حمل و نقل بارهای سنگین و شناسایی مناطق مشکل ساز استفاده شوند. در حالی که نمایش خطی خیابان ها اغلب برای شبیه سازی نویز کافی است، مدل های منطقه ای می توانند برای تجسم نتایج استفاده شوند [ 58 ]. مدلهای خیابانی دقیق با اطلاعات مربوط به ارتفاع نیز میتوانند پایهای برای شبیهسازی رواناب و سیلاب با سطوح بالایی از جزئیات باشند [ 59 ]. امیرابراهیمی [ 60] ارزیابی خسارت سیل را برای مدل های ساختمان نشان می دهد. ارزیابی های مشابهی را می توان با استفاده از مدل های فضای خیابان منطقه ای انجام داد.
4.1.4. آمایش سرزمین و نقشه برداری توپوگرافی
مدلهای فضای خیابان همچنین میتوانند برای توصیف دقیقتر سطح زمین در زمینه مدلهای منظر دیجیتال (DLM) و نقشهبرداری توپوگرافی استفاده شوند. فیوتاک و همکاران [ 61 ] روشهایی را برای تولید 3-D-DLM از منابع دادههای مختلف، از جمله جادههای منطقهای برای مساحت 254 کیلومتر مربع در نزدیکی دریاچه کنستانس ارائه میکند. مدل دامنه مدیریت زمین (LADM, ISO 19152 [ 62 ]) برای پوشش دادن اجزای اصلی مربوط به اطلاعات مدیریت زمین، از جمله اطلاعات قانونی/اداری (حقوق کاربری زمین، مالکیت، مالیات، و غیره)، نقشه برداری و نقشه برداری طراحی شده است. 63]. این همچنین به سطوحی که بخشی از جاده ها و سایر زیرساخت ها هستند مربوط می شود. مدلهای دقیق فضای خیابان میتوانند برای ادغام این اطلاعات با نمایشهای فضایی مفید باشند. این همچنین برای مدیریت دارایی زیرساخت جادهای مرتبط است و ارتباط نزدیکی با برنامههای تعمیر و نگهداری که قبلاً ذکر شد، دارد. تغییر از نقشه برداری دو بعدی به توپوگرافی سه بعدی توسط برخی آژانس های منطقه ای یا ملی اقتباس شده است [ 64 ]. این شامل مدل سازی سه بعدی زمین ها از جمله جاده ها یا سایر زیرساخت های حمل و نقل است. گریستینا و همکاران [ 65 ] مفاهیمی را برای پیادهسازی مبتنی بر GIS از یک سیستم کاداستر راه قابل استفاده برای موجودی جادهها ارائه میکند در حالی که به مزایای مدلسازی فضای خیابانی 3 بعدی میپردازد.
4.2. دسته بندی جنبه های مدل سازی کلیدی
بر اساس بررسی ادبیات ارائه شده در بخش 4.1 ، و همچنین بحث و همکاری با همکاران و ذینفعان در زمینه مدلسازی فضای خیابان و شهر، جنبههای مدلسازی کلیدی برای مدلهای دقیق فضای خیابان شناسایی میشوند. علاوه بر ویژگیهای هندسی، معنایی، توپولوژیکی و بصری، این شامل جنبههای وابسته به زمان نیز میشود، مانند نمایش اطلاعات پویا و مدیریت نسخههای مختلف مدلها. این طبقه بندی ارزیابی قابلیت های بازنمایی مدل حمل و نقل CityGML3.0 را با توجه به هر یک از این جنبه های مدل سازی در مقایسه با استانداردهای ارائه شده در بخش 3 تسهیل می کند.. علاوه بر این، این اجازه می دهد تا جنبه های مختلف مدل سازی را با توجه به اهمیت آنها برای برنامه های کاربردی مورد بحث در بخش 4.1 مقایسه کنیم . برخی از نویسندگان دارای سالها تجربه در زمینه مدلسازی و استانداردسازی شهر بوده و از اعضای فعال OGC هستند. نویسندگان همچنین در تعدادی از پروژه ها با ذینفعان مربوطه از آژانس های نقشه برداری، محیط زیست و برنامه ریزی مشارکت داشتند. شهرداری ها؛ شرکت های شبیه سازی؛ و شرکت های صنعت خودرو این کار منجر به شناسایی هفت جنبه اصلی مدل سازی زیر شده است:
-
وضوح موضوعی: امکان تمایز بین اشیاء موضوعی مختلف و همچنین درجه تقسیم بندی معنایی، ویژگی های شی موجود و روابط شی.
-
تفکیک هندسی: درجه ای که جزئیات هندسی اشیاء مجزا نشان داده می شود و همچنین درجه تقسیم بندی هندسی و هندسه های موجود.
-
دقت موقعیتی سه بعدی: دقت نسبی یا مطلق مختصات جسم.
-
توپولوژی شبکه و منطقه: روابط توپولوژیکی بین نمایش های خطی و منطقه ای شبکه های جاده ای یا اشیاء فضای خیابان.
-
موضوعیت و تکامل: به روز بودن مدل. ردیابی تغییرات مدل فضای خیابان در طول زمان و مدیریت نسخه های مختلف اما سازگار (یا مراحل در چرخه حیات) اشیا.
-
اطلاعات پویا و بلادرنگ: در نظر گرفتن اطلاعات (بسیار وابسته به زمان). پیوند دادن اشیاء با اطلاعات (بسیار) پویا و بلادرنگ.
-
تجسم: اهمیت تجسم واقع گرایانه، که ممکن است شامل بافت یا رنگ آمیزی باشد.
ارتباط این دسته بندی ها اکنون با توجه به برخی از برنامه های کاربردی ارائه شده در بخش 4.1 مورد بحث قرار می گیرد. برای بسیاری از موارد استفاده، دقت موقعیت بالای اشیاء فضای خیابانی نشان داده شده از اهمیت زیادی برخوردار است. برنامههایی مانند رانندگی مستقل، برنامهریزی اضطراری یا مدیریت استفاده از زمین، آشکارا از یک طرف به اطلاعات بسیار دقیق در مورد موقعیت و موقعیت لبههای جاده تکیه میکنند. از سوی دیگر، شبیهسازیهای دینامیک رانندگی یا شبیهسازهای آموزش راننده به مختصات واقعی واقعی (دقت موقعیتی مطلق) بستگی ندارند، بلکه به وضوح هندسی بالا و تجسم با کیفیت بالا متکی هستند. در حالی که نیاز به دقت موقعیتی بالا با وابستگی به وضوح هندسی بالا برای برنامههایی مانند تحلیلهای فضای رانندگی مستقل یا فاصله زمانی مرتبط است، شبیهسازیهای دینامیک رانندگی عمدتاً به وضوح هندسی بالا برای شبیهسازی سطوح جاده ناهموار یا ناهموار وابسته هستند.50 ]. راس [ 37 ] الزامات داده مدل های شهر سه بعدی مجازی را در زمینه مدیریت کاربری زمین فهرست می کند. وضوح موضوعی به ویژه برای برنامه هایی که نیاز به تمایز بین اشیاء فضای خیابانی از نظر موضوعی دارند بسیار مهم است. مدلهای دنیای واقعی با اطلاعات معنایی در بستر جادهها، لبهها و پیادهروها میتوانند به عنوان اطلاعات پیشینی برای نرمافزار رانندگی خودکار مفید باشند [ 66]]. برای اینکه بتوانیم فضاهای خالی برای سطوح ترافیکی مورد استفاده خودروها و همچنین سطوح ترافیکی مورد استفاده سایر انواع حمل و نقل (مانند عابران پیاده، قطارها یا کشتی ها) ایجاد کنیم، باید تمایزات موضوعی بین سطوح موضوعی مختلف امکان پذیر باشد. به استثنای شبیه سازهای رانندگی و شبیه سازی دینامیک رانندگی، موضوعیت داده های ارائه شده در مدل های فضای خیابان برای همه برنامه های دیگر ارائه شده مهم است. مدیریت مداوم نسخههای مختلف مدلهای فضای خیابان (مثلاً در چرخه عمر آنها) برای برنامههایی مانند برنامهریزی زیرساخت مرتبط است. برای مثال پروژه های بزرگ ساختمانی باید در مراحل مختلف برنامه ریزی توضیح داده شوند. روابط توپولوژیکی را میتوان با استفاده از مدلهای خیابانی دقیق مدلسازی کرد و همچنین میتواند به دیگر اشیاء موضوعی موجود در یک مدل شهر مرتبط شود. مانند ساختمان ها یا پوشش گیاهی. روهدوفر و همکاران [51 ] اهمیت روابط سلف / جانشین بین جاده ها یا خطوط منفرد را در زمینه شبیه سازی ترافیک نشان می دهد. تامینگا و همکاران [ 67 ] و Tamminga [ 14] الزامات مدلسازی را با تمرکز بر مدلهای ترافیک و حملونقل مورد تجزیه و تحلیل قرار داد و همچنین در مورد احتمال تطبیق این الزامات با ساختار داده CityGML از طریق یک پسوند دامنه برنامه کاربردی حمل و نقل (ADE) بحث کرد. این شامل، از جمله، توانایی تشخیص انواع مختلف وسایل نقلیه، نمایش استفاده ترکیبی از زیرساخت ها (به عنوان مثال، جاده و راه آهن)، نشان دادن طراحی هندسی یک جاده یا مدل سازی مناطق پارکینگ به عنوان مقصدهای میانی برای سفرهای چندوجهی است. اهمیت مدل سازی زیرساخت های حمل و نقل در سطوح ثابت جزئیات نیز توضیح داده شده است. روابط توپولوژیکی بین عناصر شبکه ابزار از اهمیت زیادی برخوردار است [ 43 ]. CityGML UtilityNetworkADE مفاهیمی را برای نمایش توپولوژی و اتصال در شبکه های ابزار ارائه می دهد [68]. این مفاهیم را می توان به مدل های فضای خیابان منتقل کرد. یک جزء دینامیکی برای مدلسازی فضای خیابان به ویژه برای برنامههای وابسته به زمان مهم است. شبیهسازیهای ترافیک باید بتوانند جریانهای ترافیکی را برای زمانهای مختلف در طول روز شبیهسازی کنند، و تحلیلهای فضایی، مانند ذرات معلق یا تجزیه و تحلیل جزیره گرمایی محلی، باید تغییرات اشیاء و مقادیر ویژگیها را در زمانهای مختلف روز یا سال در نظر بگیرند. . در حالی که تجسم واقعی فضاهای خیابان می تواند برای اکثر برنامه ها مفید باشد، برای شبیه سازهای آموزش راننده برای اطمینان از تجربه واقعی ضروری است. هندسه های غیر همپوشانی برای جلوگیری از مشکلات تجسم، مانند z-fighting ضروری هستند. تلاشهای مورد نیاز برای ایجاد تجسمسازیها نسبت به رویکردهای مدلسازی مختلف ارائهشده توسط استانداردهایی که قبلاً بحث شد، به شدت متفاوت است.
5. بحث در مورد مدل حمل و نقل پیشنهادی CityGML 3.0
شکل 2 نمودار UML مدل حمل و نقل CityGML اصلاح شده و توسعه یافته را نشان می دهد. کلاس های جدید در مقایسه با CityGML2.0 با حاشیه های نارنجی برجسته شده اند.
مطالعات متعددی از جمله بیل و کولب [ 3 ]، بیل [ 11 ]، لابتسکی و همکاران. [ 12 ]، Boersma [ 13 ] و Tamminga [ 14 ]، مدل حمل و نقل CityGML 2.0 را بررسی کرده اند، کسری ها را شناسایی کرده اند و چندین پیشنهاد برای بهبود ارائه کرده اند. بر اساس بحث با ذینفعان مربوطه و مقایسه با مفاهیم موجود در استانداردهای دیگر (به بخش 3 مراجعه کنید)، این مدل حمل و نقل پیشرفته CityGML 3.0 در چارچوب کارگروه استانداردهای OGC CityGML (SWG) [ 69 ، 70] توسعه یافت.]. توجه داشته باشید که مدل حمل و نقل CityGML 3.0 همچنان مشمول رای گیری نهایی اعضای OGC است. این پیشنهاد، شامل مفاهیم تجدید نظر شده در فضاها، نمایشهای خطی، مساحتی و حجمی، یک مفهوم LoD تجدیدنظر شده و کلاسهای جدید، با توجه به توانایی آن برای برآورده کردن مقولههای جنبه مدلسازی شناساییشده در بخش 4.2 در این فصل مورد بحث قرار میگیرد . جدول 2 خلاصه می کند که چگونه مفاهیم ماژول حمل و نقل اصلاح شده و توسعه یافته در CityGML3.0 الزامات را در دسته بندی های مربوطه برآورده می کند. بحث زیر این مفاهیم را با توجه به هر دسته بررسی و ارزیابی می کند و آنها را با استانداردهای ارزیابی شده در بخش 3 مقایسه می کند .
5.1. قطعنامه موضوعی
شبکههای خیابانی و حملونقل میتوانند بسیار بزرگ و پیچیده باشند، بنابراین استانداردهایی که با مدلسازی فضای خیابان سروکار دارند، اغلب حاوی مفاهیمی برای تقسیم موضوعی این شبکهها به اشیاء کوچکتر هستند. CityGML3.0 شبکه های خیابانی بزرگ را به صورت موضوعی به جاده ها تقسیم می کند که از بخش ها و تقاطع ها تشکیل شده است که در شکل 3 الف نشان داده شده است. علاوه بر این، هر بخش یا تقاطع را می توان به TrafficSpaces و AuxiliaryTrafficSpaces تقسیم کرد که به نوبه خود با استفاده از کلاس ، استفاده و تابع مشخص می شوند.ویژگی های. این با تجزیه معنایی اشیاء حمل و نقل مطابق با استاندارد CityGML 2.0 منسجم است و بنابراین سازگاری بین هر دو نسخه را تضمین می کند. بخشها (به رنگ نارنجی روشن) بخشهایی را نشان میدهند که به وضوح میتوان آنها را به یک جاده اختصاص داد . بخش ها توسط تقاطع ها (به رنگ آبی روشن) به هم متصل می شوند که می توانند به طور همزمان به چندین جاده تعلق داشته باشند. انواع Section ها و همچنین Intersection ها با ویژگی های کلاس مربوطه تعریف می شوند. مشابه Labetski و همکاران. [ 12 ]، تقاطع ها به عنوان اشیاء جداگانه مدلسازی میشوند که بر اساس انواع مختلف طبقهبندی میشوند [71 ]. به منظور جلوگیری از نمایش اضافی تقاطع های مشترک با چندین جاده، از مفهوم پیوند برای ارجاع به تقاطع مشترک استفاده می شود . استفاده از XLinks برای پیاده سازی پیوند شیء برای جلوگیری از نمایش های اضافی با جزئیات بیشتر در سند مشخصات CityGML [ 29 ] توضیح داده شده است. بیل و کولب [ 6 ] این مفهوم را برای انواع حمل و نقل متعدد، از جمله یک تقاطع همسطح که توسط یک جاده و یک شی راه آهن به طور همزمان مشترک است، نشان می دهند. در مثال شکل 3 a، تقاطع ها به کوچکترین مساحت مورد استفاده توسط جاده های مختلف کاهش می یابد. در برخی موارد، گسترش تقاطع ها همانطور که در شکل 3 ب نشان داده شده است، ممکن است مفید باشد. با این حال، این امر محاسبه مساحت واقعی خیابان برای هر جاده را دشوار می کند . هر دو تفسیر از یک تقاطع ممکن است و بسته به نیازهای کاربردی خاص می توانند مدل شوند. مشخصه تعیین کننده برای بخش ها / تقاطع های متعلق به همان جاده (در بیشتر موارد) یک ویژگی نام خیابان رایج است. جاده ها همچنین می توانند بسته به ویژگی های در حال تغییر، مانند مواد سطح یا محدودیت سرعت، بخش بندی شوند. در این مورد معقول نیست که هر قسمت از یک جاده را نشان دهیمبا یک بخش جداگانه برای هر ماده سطح یا محدودیت سرعت. معرفی یک سیستم مرجع خطی در ترکیب با تعریف مقاطع منطقی می تواند راه حلی برای این مشکل باشد. با این حال، این نیاز به کار بیشتر دارد.
نسخه جدید 3.0 CityGML با مفهوم LoD بازبینی شده ای ارائه می شود که توسط Löwner و همکاران پیشنهاد شده است. [ 72 ] و فقط شامل چهار سطح از جزئیات است. علاوه بر این، بر خلاف CityGML2.0، مفهوم LoD تنها به وضوح هندسی و نه موضوعی اشیا اشاره دارد. از آنجایی که تجزیه موضوعی دیگر به طور مستقیم به LoD ها مرتبط نیست، یک ویژگی جدید “دانه بودن” معرفی شده است تا سطوح مختلف تجزیه موضوعی را در ماژول حمل و نقل بیان کند. شکل 4 یک بخش با بخش های موضوعی متعدد را نشان می دهد. نشان داده شده است که یک نمایش منطقه ای با دانه بندی = مساحت باید کل عرض خیابان، از جمله پیاده روها یا حاشیه سنگ ها را پوشش دهد. تقسیم بندی دقیق تر بهTrafficSpaces و AuxiliaryTrafficSpaces که راههای ترافیکی جداگانه را نشان میدهند باید با ریزدانگی موضوعی = راه تحقق یابد. دانه بندی موضوعی = خط علاوه بر این امکان نمایش خطوط رانندگی فردی را فراهم می کند [ 3 ، 12 ، 14 ]. تا زمانی که جاده ها از نظر توپولوژیکی از هم جدا نباشند، خیابان ها با یک خط مرکزی واحد در دانه بندی موضوعی = مساحت نشان داده می شوند (خط قرمز در شکل 4 ). علاوه بر خط مرکزی راهرو، نمایشهای خطی برای مسیرهای پیادهروی و دوچرخهسواری (خطوط آبی در شکل 4)) با دانه بندی موضوعی = راه ممکن می شود، بنابراین تجزیه موضوعی دقیق تری از فضای خیابان را امکان پذیر می کند. در حالی که مسیرهای شخصی (گاهی اوقات به عنوان راهروها از آن یاد می شود) با اشیاء TrafficSpace خطی/منطقه ای منفرد به صورت دانه بندی = راه نمایش داده می شوند، نمایش دانه بندی = خط در نهایت شامل یک شی TrafficSpace خطی/منطقه ای برای هر خط رانندگی جداگانه است. این با پیشنهادات ارائه شده توسط Boersma [ 13 ] و Tamminga [ 14 ] بر اساس Beil و Kolbe [ 3 ] برای نمایش خطی جاده ها و اتصالات در سطوح مختلف جزئیات مطابقت دارد.
CityGML3.0 شامل کلاس های جدیدی است تا امکان نمایش اشیاء موضوعی بیشتر را فراهم کند. علامتگذاریها توسط یک کلاس جداگانه مدلسازی میشوند که سطوح اضافی را مستقل از سطح دانهبندی نشان میدهد. این کلاس جدید نباید به خط کشی جاده محدود شود، بلکه می تواند برای مدل سازی نشانه گذاری های مربوط به ترافیک راه آهن یا آبراه نیز استفاده شود. علامتگذاریها میتوانند در چندین فضا (کمکی) ترافیک قرار بگیرند و بنابراین در همان صفحه با اشیاء جاده قرار بگیرند، اما باید در بالای صفحه نمایش داده شوند. همانطور که قبلاً ذکر شد، حفرهها در سطوح خیابان، مانند آسیبهای جاده، منهولها یا زهکشیها، باید با هندسه MultiSurface نشان داده شوند. برخلاف Markings ، HoleSurfaces باید به صورت بریده شده مدل شودسطوح بسته در یک منطقه ترافیکی (کمکی) .
اصول و مفاهیم توضیح داده شده برای اشیاء جادهای برای آبراهها، راهآهنها و مسیرها نیز اعمال میشود . به طور مشابه، نمایش خطی و همچنین منطقه ای در سطوح مختلف دانه بندی امکان پذیر است. همه این انواع مختلف حمل و نقل با استفاده از ساختار داده مشابه مدلسازی میشوند. بنابراین، ترکیب این انواع زیرساخت ساده است [ 6 ]. این برای برنامه هایی مانند حمل و نقل چندوجهی یا ناوبری بدون مانع مفید است. لابتسکی و همکاران [ 12 ] توضیح می دهد که چرا آبراه ها باید بخشی از مدل حمل و نقل باشند. در حالی که بدنه های آبی در حال حاضر در CityGML 2.0، یک Waterway کلاس جدید نشان داده شده اندبرای مدل سازی سناریوهای حمل و نقل مرتبط با آب استفاده می شود.
تقسیم موضوعی شبکههای خیابانی به جادهها که بیشتر به بخشها و تقاطعها تقسیم میشوند ، که مجدداً به (Auxiliary) TrafficSpaces استفاده شده در CityGML3.0 تقسیم میشوند ، شبیه به مفاهیم OpenDRIVE است، که در آن جادهها و تقاطعها را میتوان متمایز کرد و شامل خطوط جداگانه است. و بخش های خط. تقاطع های OpenDRIVE به عنوان مناطقی که سه یا چند جاده به هم می رسند تعریف می شوند. GDF همچنین امکان تمایز بین جاده ها و تقاطع ها را فراهم می کند. در حالی که GDF، OSM، و INSPIRE اجازه پارتیشن بندی موضوعی جاده ها را به خطوط جداگانه نمی دهند، این در LandInfra، RoadXML و Vissim امکان پذیر است.
5.2. وضوح هندسی
مفهوم بازبینی شده LoD و همچنین معرفی سطوح مختلف دانه بندی موضوعی نیز بر نحوه نمایش هندسی اشیاء حمل و نقل تأثیر می گذارد. همانطور که قبلا ذکر شد، LoD ها در CityGML3.0 فقط به نمایش هندسی اشیا اشاره دارند. در LoD 0، هندسه اشیاء با استفاده از یک نمایش هندسی بسیار تعمیمیافته مدلسازی میشوند، در حالی که هیچ تعمیمگیری در LoD 3 اعمال نمیشود. بنابراین، بالاترین نمایش هندسی و معنایی دقیق اجسام حملونقل با استفاده از هندسه LoD 3 با دانهبندی موضوعی = خط به دست میآید. CityGML 3.0 مفهوم مدل سازی TrafficSpaces را معرفی می کند، که می تواند به صورت مکانی با هندسه ابر خطی، مساحتی، حجمی یا نقطه ای نمایش داده شود. هندسه ها با استفاده از مختصات جهان مطلق نشان داده می شوند. این مدلها میتوانند بلافاصله برای تعدادی از برنامههای شبیهسازی فضایی مورد استفاده قرار گیرند، در حالی که نمایشهای پارامتری اغلب باید قبل از آن به یک نمایش صریح تبدیل شوند (به بخش 5.7 مراجعه کنید ). برخلاف CityGML2.0، استفاده از هندسه های MultiCurve امکان نمایش کلوتوئیدها یا spline ها را فراهم می کند. نمایش های حجمی با استفاده از مفهوم فضایی تازه معرفی شده تحقق می یابد. توضیح مفصل مفهوم فضا در [ 5 ] ارائه شده است. این همچنین بر نحوه نمایش اشیاء حمل و نقل تأثیر می گذارد. شکل 5 این مفهوم را برای یک مثال ساده از a نشان می دهدراهرو جاده. مثال نمایش داده شده بخشی از یک جاده را نشان می دهد. این بخش از نظر معنایی و هندسی به دو پیاده رو و یک کالسکه که هر کدام توسط TrafficSpace خاص خود نشان داده شده است (با کادرهای آبی در شکل 5 نشان داده شده است ) تجزیه می شود. با این حال، هندسه حجمی یک فضا را می توان حذف کرد.
TrafficAreas (به رنگ سبز نشان داده شده است) سطح زمین هر TrafficSpace را نشان می دهد . همین مفهوم برای AuxiliaryTrafficAreas و AuxiliaryTrafficSpaces اعمال می شود . کلاس جدید معرفی شده ClearanceSpace (قرمز) نمایش فضایی را که باید برای اطمینان از ترافیک ایمن تمیز نگه داشته شود، ممکن می سازد. این فضاهای خالی را می توان به راحتی با اکسترود کردن TrafficAreas با مقدار مشخصی ایجاد کرد . در ترکیب با سایر اشیاء شهری، مانند CityFurniture یا Vegetation ، تضادهای احتمالی به راحتی قابل تشخیص است. ClearanceSpacesهمچنین می تواند با ابرهای نقطه ای (همانطور که توسط یک سیستم نقشه برداری سیار تولید می شود) نمایش داده شود. مثال داده شده را می توان به طور مشابه به سایر اشیاء حمل و نقل ، مانند راه آهن ، مسیر ، آبراه ، یا میدان منتقل کرد . اشیاء حمل و نقل نه تنها با سطح خود نشان داده می شوند، بلکه فضای فوق را نیز در نظر می گیرند که برای حمل و نقل استفاده می شود. این مفهوم مدل حمل و نقل CityGML 3.0 را از تمام استانداردهای مرتبط ارائه شده در بخش 3 متمایز می کند .
Boersma [ 13 ] وابستگی های گمشده بین نمایش های منطقه ای و خطی سناریو مشابه را شناسایی کرد. مشکلات تطبیق بالقوه سناریوهای یکسان که به روش های مختلف نشان داده شده اند در شکل 6 نمایش داده شده است . قسمت سمت چپ تصویر نمایش احتمالی دو خیابان متقاطع را به صورت دانه بندی = مساحت نشان می دهد. این سناریو را می توان با استفاده از چهار خط نشان دهنده هر بخش خیابان و جلسه در یک نقطه مدل کرد. از طرف دیگر یک مدل منطقه ای می تواند شامل چهار بخش و یک تقاطع باشد. به منظور ایجاد یک مدل سازگار برای مدل های خطی و همچنین مدل های منطقه ای، هر خط باید در نقاط اتصال اضافی تقسیم شود (که با نقاط زرد در شکل 6 نشان داده شده است ).
گره ها را می توان در صورت نیاز برای اتصال یا الگوریتم های گراف کوتاه ترین مسیر، از شبکه خطی مشتق کرد. مزیت این نمایش (برخلاف هندسه های GeometricComplex مورد استفاده در CityGML 2.0) این است که خطوط متقاطع که انواع مختلف حمل و نقل را نشان می دهند نیازی به گره ندارند. به این ترتیب، اگر امکان جابجایی بین آنها در یک نقطه خاص وجود نداشته باشد (به عنوان مثال، شبکه های جاده ای و راه آهن در یک تقاطع همسطح متقاطع می شوند)، انواع مختلف حمل و نقل به هم متصل نمی شوند. ادغام هندسی غیر زائد زیرساخت های حمل و نقل چندگانه در [ 6 ] مورد بحث قرار گرفته است.
نمایشهای هندسی موجود از فضای خیابان در استانداردهای دیگر در بخش 3 ارزیابی میشوند .
5.3. دقت موقعیت سه بعدی
دقت موقعیت تک تک اشیاء در مدل های سه بعدی شهر، از جمله زیرساخت های حمل و نقل، تنها به روش جمع آوری داده ها و دقت داده های تولید شده وابسته نیست. اصل مدلسازی زیربنایی یک استاندارد داده نیز بر قابلیت بازنمایی با توجه به دقت بالقوه تأثیر دارد. CityGML امکان استفاده از سیستمهای مختصات دلخواه را میدهد و مخصوصاً برای نشان دادن ساختارهای گسترده جغرافیایی (مانند جادهها یا راهآهن) که در آن انحنای زمین باید در نظر گرفته شود، مناسب است. نمایش صریح تمام هندسه ها با استفاده از مختصات جهان مطلق، امکان مدل سازی اشیاء و مرزهای اشیاء را با توجه به وسعت واقعی آنها فراهم می کند. در حالی که نمایش های پارامتریک معمولاً اطلاعاتی را در مورد مرزهای خیابان و خطوط با استفاده از ویژگی های عرض نسبت به یک خط مرجع ارائه می دهند. با این حال، اشیاء دنیای واقعی، مانند مرزهای خطوط منفرد، پیچیده و اغلب به شکل نامنظم هستند. بنابراین، یا توصیفهای پارامتریک پیچیده این اشیا (با استفاده از چندجملهها و غیره) ضروری است، یا باید سادهسازیهایی (به عنوان مثال، عرض خط ثابت) انجام شود که بر دقت موقعیتی اشیا تأثیر میگذارد. استانداردهایی که از نمایش صریح همه هندسه ها با مختصات جهان مطلق استفاده می کنند، مانند CityGML، از چنین مشکلاتی جلوگیری می کند. یا سادهسازیها (مثلاً عرض خط ثابت) باید انجام شود که بر دقت موقعیت اشیا تأثیر میگذارد. استانداردهایی که از نمایش صریح همه هندسه ها با مختصات جهان مطلق استفاده می کنند، مانند CityGML، از چنین مشکلاتی جلوگیری می کند. یا سادهسازیها (مثلاً عرض خط ثابت) باید انجام شود که بر دقت موقعیت اشیا تأثیر میگذارد. استانداردهایی که از نمایش صریح همه هندسه ها با مختصات جهان مطلق استفاده می کنند، مانند CityGML، از چنین مشکلاتی جلوگیری می کند.
5.4. شبکه و توپولوژی منطقه ای
شکل 7 a مقایسه مستقیم نمایش های شبکه خطی در سطوح مختلف دانه بندی را نشان می دهد. در حالی که نمایشهای خطی در دانهبندی = مساحت با یک محور در هر مسیر و مقطع مدلسازی میشوند، نمایشهای خطی در دانهبندی = خط شامل خطوط جداگانهای برای هر خط رانندگی منفرد است که از هر راه ممکنی که یک خودرو میتواند در پیش بگیرد. این به طور خودکار یک مفهوم سلف/جانشین مفید برای برنامههایی مانند ناوبری یا شبیهسازی ترافیک را نشان میدهد. شکل 7 ب نشان می دهد که این روابط سلف/جانشین بسته به سطح مورد نظر جزئیات می تواند پیچیده شود.
یک نمایش صریح از روابط سلف / جانشین (مثلاً در مورد محدودیتهای چرخش) میتواند همانطور که در شکل 8 نشان داده شده است مدلسازی شود.. قطعه B سلف قطعه A و C است، قطعه A سلف قطعه B است. در عین حال، قطعه A و C جانشین قطعه B و قطعه B جانشین قطعه A هستند. به این ترتیب تمام مسیرهای ممکن تعریف می شوند. این مفهوم را می توان برای اجسام مساحتی یا حجمی نیز به کار برد. در حالی که این مفهوم جذابیت CityGML را برای برنامههای ناوبری افزایش میدهد، استانداردهای دیگر (به عنوان مثال، OpenDRIVE، RoadXML، GDF) مکانیسمهای پیوند پیچیدهتری برای نمایش منطق ترافیک، از جمله روابط خطوط منفرد با علائم راهنمایی و رانندگی یا چراغهای راهنمایی را نشان میدهند. این اطلاعات را می توان در یک پسوند دامنه برنامه (ADE) به CityGML3.0 اضافه کرد.
5.5. موضوعیت و تکامل
موضوعیت داده ها صرفاً به داده های موجود یا چرخه های به روز رسانی داده ها بستگی دارد. با این حال، یکی دیگر از جنبه های این امر، ذخیره و مدیریت نسخه های مختلف، تاریخ سازی و مدیریت نسخه سازگار سناریوهای برنامه ریزی جایگزین است. CityGML3.0 شامل یک مفهوم نسخه سازی برای نمایش نسخه های متعدد از اشیاء شهر و ذخیره اطلاعات در مورد تغییرات در طول کل طول عمر اشیاء منفرد است [ 73 ]. GDF “به روز رسانی سوابق اطلاعات” را برای ثبت تغییرات در یک مجموعه داده خاص ارائه می دهد. INSPIRE و OKSTRA تنها استانداردهای دیگری از استانداردهای ارائه شده در بخش 3 برای ارائه مفاهیم مشابه هستند.
5.6. اطلاعات پویا و بلادرنگ
مفهوم جدید Dynamizer که با CityGML3.0 معرفی شد، امکان مدلسازی ویژگیهای بسیار پویا و متغیر با زمان را در مدلهای معنایی شهر سه بعدی [ 74] فراهم میکند.]. با استفاده از Dynamizers، مقادیر مشخصه استاتیک اشیاء فضای خیابان را می توان با داده های سری زمانی نادیده گرفت. داده های سری زمانی را می توان در فایل های خارجی یا توسط خدمات مشاهده حسگر مرتبط ارائه کرد. این مربوط به زیرساخت های حمل و نقل است تا اطلاعاتی را در مورد تغییر حجم ترافیک برای پخش فعلی یا تغییر محدودیت های سرعت برای زمان های مختلف روز نشان دهد. GDF از تعریف جنبه های زمانی ویژگی ها، ویژگی ها و روابط با استفاده از زمان شروع و پایان پشتیبانی می کند. OpenDRIVE به OpenScenario استاندارد مرتبط برای توصیف تعاملات پویا اعضای ترافیک، مانند مانورهای سبقت گرفتن اشاره دارد، اما شامل مفاهیمی برای نمایش اطلاعات پویا نمی شود. سایر استانداردهای ارائه شده در بخش 3 حاوی مفاهیم مشابهی نیستند.
5.7. تجسم
مفاهیم پارتیشن بندی فضایی و معنایی شبکه های حمل و نقل در ترکیب با مکانیسم های پیوندی که قبلاً مورد بحث قرار گرفت، امکان نمایش غیر زائد از اشیاء دارای سطوح یکسان را فراهم می کند. از جمله مزایای دیگر، این امر تجسم دقیق را با اجتناب از مشکلاتی مانند z-fighting تضمین می کند. نمایشهای یکپارچه و غیر زائد از نظر معنایی و هندسی با استفاده از هندسههای صریح منطقه را میتوان مستقیماً مشاهده کرد، در حالی که دادههای ارائه شده بر اساس استانداردها با استفاده از نمایشهای پارامتریک (مثلاً برای نشان دادن مرزهای خطوط نسبت به یک خط مرجع) ابتدا باید تبدیل شوند. بسته به هندسه پایه استفاده شده از خط مرجع و توصیف پارامتری مرزهای جسم (اسپلین، کلوتوئید)، این می تواند دشوار باشد. اشیاء فضای خیابان (مخصوصاً مناطق خط در داخل اتصالات) اغلب نسبت به چندین خط مرجع به طور همزمان نشان داده می شوند. این منجر به همپوشانی هندسه ها در صورت تبدیل به نمایش های صریح منطقه می شود. در نتیجه، نرم افزارهای تجاری کمی برای حل این مسائل به منظور استخراج یک تجسم منطقه ای یکپارچه و غیر زائد از داده های پارامتری موجود است. در مقابل، دادههای ارائهشده در قالبهایی که قبلاً از هندسههای منطقه صریح استفاده میکنند، مانند CityGML، میتوانند مستقیماً با نرمافزار منبع باز مانند 3DCityDB و Web-Map-Client مربوطه تجسم شوند. نرم افزارهای تجاری کمی برای حل این مسائل به منظور استخراج یک تجسم منطقه ای یکپارچه و غیر زائد از داده های پارامتری موجود است. در مقابل، دادههای ارائهشده در قالبهایی که قبلاً از هندسههای منطقه صریح استفاده میکنند، مانند CityGML، میتوانند مستقیماً با نرمافزار منبع باز مانند 3DCityDB و Web-Map-Client مربوطه تجسم شوند. نرم افزارهای تجاری کمی برای حل این مسائل به منظور استخراج یک تجسم منطقه ای یکپارچه و غیر زائد از داده های پارامتری موجود است. در مقابل، دادههای ارائهشده در قالبهایی که قبلاً از هندسههای منطقه صریح استفاده میکنند، مانند CityGML، میتوانند مستقیماً با نرمافزار منبع باز مانند 3DCityDB و Web-Map-Client مربوطه تجسم شوند.75 ، 76 ]. علاوه بر این، ماژول ظاهری CityGML مفاهیمی را برای نمایش ویژگیهای قابل مشاهده برای اجسام هندسی سطح با استفاده از رنگها یا بافتها ارائه میکند، که (به استثنای RoadXML و Vissim) در سایر استانداردها و قالبهای داده ارائهشده در بخش 3 گنجانده نشده است .
6. مدل های فضای خیابان CityGML برای شهرهای مختلف
در حالی که برخی از مدلهای حمل و نقل CityGML2.0 در دسترس هستند (به عنوان مثال، سنگاپور [ 77 ])، اکثر مدلهای شهر تاکنون بر روی مدلهای ساختمانها و زمین تمرکز کردهاند. در ادامه نشان میدهیم که مدلهای فضای خیابان CityGML3.0 را میتوان از منابع دادههای مختلف و برای شهرهای مختلف در سراسر جهان استخراج کرد. مزیت مدل های موجود در قالب CityGML این است که می توانند بلافاصله برای چندین برنامه استفاده شوند (به بخش 7 مراجعه کنید ). بنابراین، این فصل نحوه ایجاد مدلهای دقیق فضای خیابان CityGML را برای شهرهای مختلف، از جمله نیویورک، ملبورن، یا Grafing در نزدیکی مونیخ، و بر اساس منابع دادههای مختلف نشان میدهد. همه این مثال ها را می توان به صورت تعاملی در کاوش کردhttps://wiki.tum.de/display/gisproject/Online+Demo+Collection . بیشتر این مجموعه داده ها نیز به عنوان داده باز ارائه می شوند.
6.1. شهر نیویورک
نمایش دقیق فضای خیابان ابتدا با استفاده از مثال شهر نیویورک آزمایش شده است [ 3 ]. پورتال داده باز نیویورک تعداد زیادی مجموعه داده شامل اطلاعات هندسی و معنایی در مورد اشیاء فضای خیابان را برای کل شهر فراهم می کند که برای مدل سازی دقیق فضای خیابان مناسب است. این دادهها با استفاده از نرمافزار «موتور دستکاری ویژگیها» (FME) تبدیل، دستکاری و یکپارچه میشوند تا مجموعه دادههای سازگار با CityGML تولید کنند.
مدل دقیق فضای خیابان شهر نیویورک با استفاده از سه منبع داده اصلی تولید شده است. یک مدل شهر سه بعدی معنایی شهر نیویورک در یک پروژه مطالعاتی انجام شده در کرسی ژئوانفورماتیک دانشگاه فنی مونیخ [ 4 ] تولید شد. مجموعه داده های CityGML تولید شده برای دانلود در وب سایت پروژه موجود است ( https://www.gis.bgu.tum.de/projekte/new-york-city-3d). مجموعه داده جاده ارائه شده شامل یک نمایش شبکه خط LoD0 است و مبنایی برای مدل خیابان تولید شده در این کار است. دومین منبع داده اصلی، پایگاه داده پلانیمتری نیویورک است که در پورتال داده باز نیویورک ارائه شده است. این شامل نمایشهایی از انواع ویژگیها، مانند بستر جادهها، پیادهروها، یا پارکینگها، در قالب دادههای Shapefile منطقهای است. دادههای اضافی برای جستجوی وبسایتهای وزارت حملونقل نیویورک (DOT)، وزارت اطلاعات، فناوری و ارتباطات راه دور (DoITT) و وزارت برنامهریزی شهر نیویورک (DCP) جمعآوری میشود. این شامل اطلاعاتی مانند محدودیتهای سرعت و رتبهبندی پیادهروی و همچنین دستورالعملهایی در رابطه با ابعاد فیزیکی و مواد مورد استفاده اشیاء فضای خیابان است. تمام تبدیل و دستکاری داده ها با استفاده از نرم افزار «موتور دستکاری ویژگی» (FME 2016.1) انجام شد. برای ذخیره سازی، مدیریت و ادغام حجم زیادی از داده های تولید شده، پایگاه geodatabase منبع باز3DCityDB نسخه 3.3استخدام شده. پیاده سازی واقعی باید بر اساس مدل حمل و نقل CityGML 2.0 معتبر فعلی باشد، اما قبلاً پیشنهادات ارائه شده در فصل قبلی این مقاله در نظر گرفته شده است. مجموعه داده های موجود در پایگاه داده Planimetric از طریق یک پایگاه جغرافیایی ESRI در مختصات هواپیمای ایالت نیویورک، منطقه شرقی لانگ آیلند، NAD83، پای ایالات متحده تحویل داده می شود. ابتدا این داده ها باید به سیستم مرجع مختصات (EPSG:32118) مورد استفاده پروژه مذکور تبدیل می شد. دوم، حوزههای آزمایشی مناسب به منظور آزمایش رویکردهای مختلف پیادهسازی با حجم قابل مدیریت داده انتخاب شدند. دادههای ورودی شامل خطوط مرکزی خیابان با تعداد زیادی ویژگی، مجموعه دادههای اضافی حاوی ویژگیهای بیشتر برای هر بخش خط مرکزی و دادههای منطقهای دقیق در مورد ویژگیهای موضوعی متعدد، مانند بستر جادهها، پیادهروها، یا جزایر ترافیکی (پایگاه داده پلانیمتری). وظایف اصلی ادغام این مجموعه داده ها در یک مجموعه داده سازگار با CityGML است. ویژگیهای اضافی مانند محدودیتهای سرعت، رتبهبندیهای روسازی، یا تعداد خطوط از مجموعه دادههای ذکر شده با دادههای خط مرکزی از قبل سازگار با CityGML از طریق ویژگیهای مربوطه، مانند «نام خیابان» یا «شناسه قطعه» مطابقت داده شد. سپس اطلاعات موجود در این مجموعه داده خطوط مرکزی “جدید” با استفاده از روش تطبیق فضایی به هندسههای بستر جاده مربوطه منتقل شد. تمام اشیاء فضای خیابانی موجود مانند پیادهروها، پارکینگها و غیره پس از آن از نظر معنایی و هندسی دستکاری شدند تا به یک مدل فضای خیابانی سهبعدی معنایی کل شهر دست یابیم. با توجه به حجم زیاد داده ها، چندین فایل CityGML تقسیم بندی شده به ترتیب برای هر کلاس شی streetspace ایجاد شد. اینها شامل 11 کلاس موضوعی موضوعی، مانند بستر جاده، پیاده رو، یا پارکینگ، با مجموع 508660 شی فضای خیابانی است که هر کدام به مناسب ترین از 3 زیر کلاس ممکن اختصاص داده شده است.جاده ، میدان ، یا مسیر . علاوه بر این، مدلهای ساختمان LoD2 ارائهشده توسط NYC DoITT با تخصیص ویژگیهایی از سایر مجموعههای داده به اشیاء ساختمان از طریق «شمارههای شناسایی ساختمان» مربوطه، با اطلاعات معنایی غنی میشوند. تمام اشیاء CityGML تولید شده و همچنین اندازه داده های مربوطه آنها در جدول 3 فهرست شده است .
مجموعه داده های CityGML تولید شده بیشتر پردازش شدند. با استفاده از 3DCityDB، فایلهای KML-/COLLADA و صفحات گسترده مربوطه برای هر کلاس موضوعی بهصورت جداگانه به منظور ادغام اطلاعات معنایی و هندسی از نظر یک مدل تجسم KML کاشیشده، تولید شدند. این با استفاده از 3D-Web-Map-Client به دست آمد و با منبع باز «WebGL Virtual Globe Cesium» تجسم شد.
به منظور پیادهسازی تجزیه معنایی دقیقتر اشیاء فضای خیابان، ناحیه کوچکتری انتخاب شد و ساختار دادههای این گزیده با معرفی TrafficAreas و AuxiliaryTrafficAreas تنظیم شد ، بنابراین اشیاء فضای خیابان جداگانه مشخصتر شد و مدل فضای خیابان LoD2 تولید شد. برای بیان وابستگیها به ویژگیهای سطح بالا، هر شی به جاده ، میدان یا مسیر فوقالعاده مرتبط است.اشیاء. علاوه بر این، تمام اشیاء با بافتهای مناسب بهبود مییابند تا تجسم واقعیتری را به دست آورند. با توجه به CityGML 2.0، مفهوم بخش/تقاطع که قبلاً معرفی شد هنوز نمیتوانست بهصراحت پیادهسازی شود، اما قبلاً با ایجاد اشیاء جادهای جداگانه برای هر بخش/تقاطع بر اساس پیشنهادات ارائه شده در بخش 5 در نظر گرفته شده بود ، بنابراین عملی بودن مفهوم شکل 9 ساختار داده این گزیده فایل CityGML را به تصویر می کشد.
ویژگیهای سطح فرعی، مانند TrafficAreas منفرد یا AuxiliaryTrafficAreas ، به برخی از ویژگیهای سطح بالا مانند Road یا Square تعلق دارند . در حالی که کلاسهای اشیاء مانند “Plaza” (زرد شماره 1، 2 و 3) یا “پارکینگ” (زرد شماره 4) متعلق به Squares هستند، جادهها از اشیاء فضای خیابانی مانند “Roadbeds”، “Sidewalks” یا “نوارهای تقسیم”. دو نوع مختلف از اشیاء جاده نشان داده شده است، یعنی بخشهای جاده (قرمز Nr. 1، 2، 4، 5، 6، 8، و 9) و تقاطعها (قرمز Nr. 3 و 7)، که هر کدام با یک citygml_function مربوطه مشخص میشوند .صفت. این مجموعه داده اخیراً برای تولید داده بر اساس ساختار مدل حمل و نقل CityGML 3.0 ارائه شده در بخش 5 استفاده شده است . این امر با استفاده از GML Writer عمومی با اضافه کردن طرحواره برنامه GML از CityGML 3.0 به عنوان فایل xsd با استفاده از نرم افزار FME به دست آمد. داده های به دست آمده را می توان در صفحه مربوطه GitHub ( https://github.com/tum-gis/cityGML 3.0-transportation-examples) پیدا کرد.
تا به حال، تمام اشیاء فضای خیابان دارای ارتفاع پایه صفر متر هستند. با استفاده از اطلاعات ارتفاع ارائه شده توسط یک مدل رقومی ارتفاع (DEM)، اشیاء در منطقه کوچکتر که قبلا توضیح داده شد، با زمین سازگار می شوند. مدل ارتفاع دیجیتال با وضوح 1 فوت استفاده شده برای این مثال نیز به عنوان تصویر “GeoTIFF” توسط پورتال داده باز شهر نیویورک ارائه شده است. به منظور تولید هندسه های معتبر بر اساس ISO 19107 [ 32 ]، یک روش مثلث بندی در FME پیاده سازی شده است. روش تطبیق اشیاء فضای خیابان با توجه به زمین در شکل 10 نشان داده شده است .
ابتدا اطلاعات ارتفاع موجود در هر پیکسل تصویر از فوت به متر تبدیل می شود. سپس یک مدل سطح سه بعدی از تصویر تولید می شود. خطوط مرزی تمام اشیاء فضای خیابانی منفرد ایجاد شده و روی سطح ایجاد شده قرار می گیرند ( شکل 10 a). در مرحله بعد، یک مدل ارتفاع دیجیتال جدید با ترکیب مرزهای شی ایجاد شده به عنوان خطوط شکست سخت در مدل سطح ایجاد می شود ( شکل 10 ب). در مرحله آخر، ویژگی های موضوعی به هر مثلث منفرد تولید شده اختصاص داده می شود. این منجر به نتیجه نشان داده شده در شکل 10 ج می شود. در حالت ایده آل، یک سطح مثلثیهندسه برای هر شی معنایی باید تولید شود. به این ترتیب، مدل رقومی ارتفاع را می توان با سطوح مثلثی منفرد که هر یک به اشیاء موضوعی خاص اختصاص داده شده اند، جایگزین کرد. نتیجه با استفاده از 3DCityDB Web-Map-Client تجسم می شود. تغییرات در ارتفاع تک تک اشیاء خیابان قابل مشاهده است. روبلز-اورتگا و همکاران [ 78 ] یک رویکرد مرتبط برای تولید خیابانهای شیبدار با استفاده از سطوح چند ضلعی و TIN ارائه میکند. شکل 11منطقه ای در مقابل ساختمان Flatiron را با جزئیات بیشتر نشان می دهد. اشیاء منفرد فضای خیابان، مانند بستر جاده یا پیاده رو، ارائه می شوند. در این مثال، یک شی بستر انتخاب شده و در نتیجه با رنگ زرد مشخص می شود. ویژگی های شی خاص، مانند نام خیابان یا تابع، بلافاصله نمایش داده می شوند. اشیاء برجسته، مانند پیاده روها یا حاشیه ها، با افست عمودی 6 اینچ نشان داده شده اند، و جزایر ترافیکی و نوارهای جداکننده بین دو خط رانندگی، 12 اینچ بلند شده اند. این یک مدل فضای خیابانی سه بعدی واقع گرایانه ایجاد می کند. در میان سایر پیشرفتها، تقاطعها بهعنوان ویژگیهای مجزای غیرهمپوشانی نشان داده میشوند که حاوی اطلاعاتی در مورد نامهای خیابانهای متقاطع هستند. مفهوم XLink ارائه شده هنوز اجرا نشده است. لطفاً توجه داشته باشید که این مدل فضای جاده ای نتیجه یک نسل رویه ای نیست، بلکه طرح دقیق فضای خیابان واقعی شهر نیویورک را منعکس می کند. از این رو، می توان از آن برای برخاست کمی (به عنوان مثال، سطح سنگفرش شده برادوی) یا کارهای اندازه گیری استفاده کرد. توضیحات گسترده ای از پروژه، از جمله توضیح دقیق روش پیاده سازی، در ویکی پروژه قابل دسترسی است (https://wiki.tum.de/display/gisproject/3D+City+Model+of+New+York+City ). همه فضاهای کاری FME ایجاد شده در طول پروژه را می توان در GitHub مربوطه بارگیری کرد ( https://github.com/tum-gis/3d-model-new-york-city ). همانطور که قبلا ذکر شد، تمام داده های مطابق با CityGML برای کل شهر و همچنین گزیده ای دقیق تر از نظر معنایی را می توان از وب سایت پروژه دانلود کرد.
6.2. ملبورن
مفاهیم مدلهای فضای خیابان نشاندادهشده در بخش 6.1 را میتوان به شهرهای دیگر منتقل کرد، با توجه به اینکه آنها منابع داده مشابهی را ارائه میکنند. شهر ملبورن همچنین داده های باز را در مورد اشیاء فضای خیابان برای مرکز شهر ارائه می دهد ( https://data.melbourne.vic.gov.au/Assets-Infrastructure/Road-segments-with-surface-type/su97-b2at ). مشابه فرآیند توضیح داده شده در بخش 6.1، FME را می توان برای تولید داده های سازگار با CityGML استفاده کرد. مجموعه داده اصلی شامل فایلهای شکل دوبعدی چند ضلعی است که انواع مختلف اطلاعات سطح را نشان میدهد، مانند گذرگاهها، مسیرهای پیادهروی، تقاطعها، محلهای پارکینگ، حاشیههای جاده یا تراموا. داده ها همچنین دارای ویژگی های بسیاری از جمله شرایط (رده بندی روسازی)، عرض متوسط، طول یا مواد سطح هستند. در ترکیب با مجموعه دادهها، مانند «راهرو جاده»، «مبلمان خیابان» یا «نام خیابان»، میتوان یک مدل فضای خیابانی دقیق ایجاد کرد. مجموعه داده “راهروی جاده” کل بخش های جاده را نشان می دهد و بنابراین برای تبدیل شدن به بخش های CityGML همانطور که در بخش 5 توضیح داده شد مناسب است . همچنین شامل یک ویژگی در خیابان های مجاور برای هر بخش است. از این اطلاعات می توان برای تعیین بن بست ها استفاده کرد. شکل 12اولین نتایج مدل فضای خیابان ایجاد شده را نشان می دهد. حتی اگر رویههای استخراج اشیاء فضای خیابان CityGML از شکلفایلهای داده باز برای نیویورک و ملبورن بسیار مشابه است، فضاهای کاری کاملاً جدید FME به دلیل تفاوت در ساختار داده یا ویژگیهای موجود باید ایجاد میشد. با این حال، ارزش تلاش را دارد، زیرا مدلها در قالب CityGML میتوانند مستقیماً برای چندین برنامه استفاده شوند (به بخش 7 مراجعه کنید ). دستورالعملهایی در مورد نحوه ثبت اطلاعات منطقهای در فضای خیابان (بخشبندی، ویژگیها و غیره) منجر به دادههای منبع استاندارد میشود که میتواند آسانتر برای برنامههای ارائهشده در بخش 4 استفاده شود . در حالی که مدل های شهر نیویورک و ملبورن هر دو با داده های منبع به دست آمده از تصاویر منطقه ایجاد شده اند،بخش 6.3 توضیح میدهد که چگونه دادههای نقشهبرداری سیار میتوانند برای تولید نمایشهای بسیار دقیق فضای خیابان استفاده شوند.
6.3. گرافینگ در نزدیکی مونیخ
کار Coduro [ 79 ] مثال سومی را برای ادغام مداوم داده های خیابانی در قالب CityGML نشان می دهد. برای آزمایشها، مجموعه دادهها توسط شرکت 3D Mapping Solutions GmbH ارائه شد که از سیستمهای نقشهبرداری سیار برای به دست آوردن دادههای با وضوح بالا از فضاهای خیابان و استخراج نقشههای بسیار دقیق (نقشههای HD) از آن (مثلاً در قالب OpenDRIVE) استفاده میکند. داده های شهر گرافینگ در نزدیکی مونیخ به عنوان نمونه ای از مجموعه داده ها استفاده می شود. منطقه اطراف بازار شهر توسط شرکت 3D Mapping Solutions GmbH در تابستان 2017 به صورت سینماتیک بررسی شد. طول کل محورها 1.8 کیلومتر است. این منطقه شامل 4 منطقه عبور، 12 عنصر خیابان و اشیاء فضای خیابانی متعدد است. در ارتباط با پروژه ای از شرکتCADFEM و شرکت تابعه آن virtualcitySYSTEMS GmbH و شهر Grafing، یک مدل شهر سه بعدی مبتنی بر CityGML معنایی ایجاد شد. در حالی که مدل ساختمان توسط آژانس دیجیتال سازی، اینترنت پرسرعت و نقشه برداری (LDBV) باواریا ارائه شده است ، بافت های روی سطوح ساختمان توسط virtualcitySYSTEMS اعمال شده است.با استفاده از تصاویر هوایی مورب ابتدا، روش هایی برای تبدیل داده های فضای جاده به یک مدل فضای خیابانی سه بعدی معنایی توسعه یافت. سپس این روشها با استفاده از تبدیل دادههای نقشهبرداری تلفن همراه تهیهشده برای فرمت OpenDRIVE به قالب CityGML به عنوان نمونه مورد بررسی قرار گرفتند و در عمل با استفاده از ناحیه آزمایش Grafing پیادهسازی شدند. این گردش کار با یک فرآیند تولید برای تولید داده های CityGML و OpenDRIVE به طور همزمان از یک منبع داده مشترک ادغام شد. نتیجه پیادهسازی عملی یک مدل فضای مجازی مجازی منطبق با CityGML است که بر اساس دادههای خط و شیء گرفته شده توسط نقشهبرداری موبایل است. مدل تفصیلی فضای خیابان بافتی است و در میان خطوط دیگر، مناطق سبز، مناطق پارکینگ، علائم راهنمایی و رانندگی و درختان تشکیل شده است. ترکیب این مدل فضای خیابانی با مدلهای ساختمان LoD2 موجود منجر به یک مدل شهر مجازی یکپارچه شد. تجسم نهایی در 3DCityDB Web-Map-Client مبتنی بر سزیوم، پیوند داده های خیابانی بسیار دقیق و مدل های ساختمان های سه بعدی مجازی را امکان پذیر می کند. علاوه بر تجسم، مشتری وب می تواند برای پرس و جوها و تجزیه و تحلیل فضای خیابان، مانند انتخاب جاده ها با محدودیت سرعت مشخص، استفاده شود. دادههای فضای خیابان به دلیل ارائه واقعی منطقهای در CityGML، وضوح بیشتری به دست میآورند، همانطور که در کلاینت وب می تواند برای پرس و جوها و تجزیه و تحلیل فضای خیابان، مانند انتخاب جاده ها با محدودیت سرعت معین استفاده شود. دادههای فضای خیابان به دلیل ارائه واقعی منطقهای در CityGML، وضوح بیشتری به دست میآورند، همانطور که در کلاینت وب می تواند برای پرس و جوها و تجزیه و تحلیل فضای خیابان، مانند انتخاب جاده ها با محدودیت سرعت معین استفاده شود. دادههای فضای خیابان به دلیل ارائه واقعی منطقهای در CityGML، وضوح بیشتری به دست میآورند، همانطور که درشکل 13 . علاوه بر این، دادههای جریان ترافیک ارائهشده توسط شرکت OBERMEYER Planen + Beraten با استفاده از مدلهای خودرو مشاهده شد. انیمیشنی از نتایج شبیه سازی را می توان به صورت تعاملی مشاهده کرد ( https://wiki.tum.de/display/gisproject/Online+Demo+Collection ).
6.4. تقاطع پیچیده در اینگولشتات برگرفته از داده های OpenDRIVE
شواب و همکاران [ 8 ] نشان داد که چگونه می توان داده های پارامتریک OpenDRIVE را با استفاده از نرم افزار تبدیل منبع باز r:trån ( https://github.com/tum-gis/rtron ) به داده های سازگار با CityGML منطقه ای تبدیل کرد. نتیجه با استفاده از 3DCityDB Web-Map-Client تجسم شده است و در شکل 14 نشان داده شده است . این با استفاده از داده های OpenDRIVE (ارائه شده توسط 3D Mapping Solutions ) از یک تقاطع پیچیده در اینگولشتات نشان داده شده است. با استفاده از FME، داده های CityGML تولید شده بیشتر به هندسه های غیر همپوشانی تبدیل می شوند و با توجه به مفاهیم معنایی شرح داده شده در بخش 5 تطبیق داده می شوند . هر TrafficArea بخشی از یک بخش یا تقاطع مربوطه استهدف – شی. علاوه بر این، اطلاعات مربوط به (چندین) تابع (های) و همچنین اطلاعات مربوط به خطوط مرجع OpenDRIVE در هر TrafficArea ذخیره می شود . علامتگذاریها بهعنوان کلاس مستقل مدلسازی میشوند و در یک لایه جداگانه در بالای دیگر اشیاء فضای خیابانی تجسم میشوند.
6.5. CityGML 3.0 Concept Demo برای منطقه ای در اطراف TU مونیخ
شکل 15 نمایشی را نشان می دهد که برخی از مفاهیم مدل حمل و نقل پیشنهادی CityGML 3.0 ارائه شده در بخش 5 را نشان می دهد . نسخه ی نمایشی با دیجیتالی کردن خیابان های اطراف TU مونیخ از TrueDOP20 با دقت در سطح خط ایجاد شد. سپس دادههای دیجیتالی شده با استفاده از FME به دادههای مطابق با CityGML تبدیل شدند و با استفاده از 3DCityDB Web-Map-Client تجسم شدند. نسخه ی نمایشی شامل TrafficSpaces به عنوان حجمی و TrafficAreas به عنوان نمایش های خطی و منطقه ای در دانه بندی = خط است.
7. مثال های کاربردی
همانطور که قبلاً در بخش 4 توضیح داده شد ، مدلهای شهر دیجیتال و بهویژه نمایشهای دقیق منطقهای از فضای خیابان میتوانند برای کاربردهای مختلف مفید باشند. برخی از این موارد استفاده، مانند تجزیه و تحلیل تابش خورشیدی، شبیهسازی ترافیک، یا مدیریت کاربری زمین، قبلاً با استفاده از مدلهای فضای خیابان تولید شده در بخش 6 آزمایش شدهاند.. اولین نتایج این آزمایشات در این قسمت ارائه شده است. در حالی که بیشتر برنامهها با استفاده از مدل فضای خیابان نیویورک نشان داده میشوند، مدلهای شهرهای دیگر که قبلاً ارائه شدهاند نیز برای آن برنامهها مناسب هستند. با استفاده از Web-Map-Client Pro (توسعه یافته توسط رئیس ژئوانفورماتیک در TUM)، می توان تحلیل های گسترده، مدیریت کاربری زمین یا برنامه ریزی شهری را انجام داد. مدل فضای خیابان نیویورک حاوی اطلاعات معنایی بسیار متنوعی است، مانند نام خیابان ها، تعداد خطوط رانندگی، مساحت خیابان در متر مربع، یا اطلاعاتی در مورد شرایط سطح جاده. این ویژگی ها را می توان در ترکیب های مختلف پرس و جو کرد و بنابراین برای به دست آوردن اطلاعات اضافی مورد استفاده قرار گرفت. ابتدا کلیه محدوده های تردد (کف جاده ها و تقاطع ها) متعلق به خیابان پنجم انتخاب می شوند. با جمع کردن تمام مقادیر مربوط به “مساحت_مربع”، کل مساحت ترافیک در متر مربع خیابان پنجم محاسبه می شود. سپس، با استفاده از اطلاعات مربوط به شرایط روسازی خیابان (رده بندی شده با 1-3 = بد، 4-7 = عادلانه، 8-10 = خوب)، تمام اشیاء بستر جاده (خیابان 5) با رتبه آسفالت خیابان 6 (کمترین رتبه موجود مقدار) انتخاب می شوند. با محاسبه مساحت کل بر حسب متر مربعاز اشیاء بستر راه انتخاب شده، مفروضاتی در مورد هزینه های بالقوه تعمیرات آتی می توان ایجاد کرد. توجه داشته باشید که همه اشیاء بستر و تقاطع ها حاوی اطلاعاتی در مورد رتبه بندی روسازی نیستند. نتایج این محاسبه برای خیابان پنجم به شرح زیر است:
-
مساحت کل بستر جاده: 273198 متر مربع .
-
مساحت کل تقاطع: 156085 متر مربع .
-
سطح روسازی = 6: 43,395 متر مربع .
-
طبقه بندی روسازی = 8–10: 136322 متر مربع .
اطلاعات دقیق در مورد وسعت سطح خیابان و سطوح پیاده رو در ترکیب با پوشش گیاهی و اشیاء مبلمان خیابان می تواند برای تجزیه و تحلیل فضای خالی استفاده شود. به عنوان مثال، در آلمان، فضایی تا ارتفاع 4.5 متری از سطح جاده باید از هر گونه مانع احتمالی پاک باشد. برای پیاده روها این مقدار 2.5 متر تعیین شده است. هنگامی که هندسه سطح دقیق در دسترس باشد، می توان این فضاها را به راحتی با اکسترود کردن سطوح زمین اشیاء فضای خیابان مربوطه ایجاد کرد ( شکل 15 را ببینید ). مدل خیابان سه بعدی NYC همچنین برای استخراج مجموعه داده های ورودی برای نرم افزار شبیه سازی ترافیک میکرو Vissim استفاده شد. این نرم افزار برای شبیه سازی ترافیک مبتنی بر رفتار میکروسکوپی به منظور تجزیه و تحلیل و بهینه سازی جریان های ترافیکی استفاده می شود [ 21 ]. روهدوفر [ 22] نشان داد که چگونه می توان اطلاعات هندسی، معنایی و توپولوژیکی موجود در مجموعه داده های CityGML را به فرمت ویژه Vissim تبدیل کرد. سپس از این داده ها برای انجام شبیه سازی ترافیک استفاده می شود. در نهایت، داده های شبیه سازی تولید شده به داده های متغیر زمانی KML/COLLADA/glTF تبدیل شدند که می توانند در GoogleEarth یا 3DCityDB Web-Map-Client تجسم شوند. شکل 16 نتایج این فرآیند را نشان می دهد. قسمت سمت چپ تصویر تجسم کوچکنمایی شده از نقاط قرمز متحرک را نشان میدهد که نماد ماشینهای در حال حرکت است. تجسم با وضوح بالاتر در بخش سمت راست گرافیک، مدلهای ماشین دقیقی را نشان میدهد که برای نمایش حرکت ترافیک در مدل شهر استفاده میشوند. همان تجسم حرکت ترافیک پویا برای مدل Grafing در نزدیکی مونیخ نشان داده شده در شکل 13 تحقق یافت..
شواب و همکاران [ 8 ] از مدل یک تقاطع پیچیده در اینگولشتات که در شکل 14 نشان داده شده است برای ایجاد یک طرح منظره شبیه سازی استفاده شده توسط چارچوب شبیه سازی رفتار عابر پیاده momentTUM [ 80 ] استفاده کرد. اطلاعات سطوحی که ترجیحاً توسط عابران پیاده استفاده میشود، مانند پیادهروها یا گذرگاهها، در ترکیب با موانع، مانند ساختمانها، پوشش گیاهی یا مبلمان شهری، برای ایجاد یک نمودار ناوبری برای یافتن مسیر استفاده میشود، در حالی که لبهها از وزندهی مبتنی بر ریسک پیروی میکنند. لبه ای که بر روی سطح بستر جاده قرار دارد نسبت به لبه ای که در پیاده رو قرار دارد وزن ریسک بالاتری دارد. این اطلاعات از تابع CityGML یا ویژگیهای استفاده موجود در TrafficAreas منفرد مشتق شده استاز مدل ارائه شده پس از شبیهسازی این سناریوها، نتایج شبیهسازیها با استفاده از مدل فضای خیابانی دقیق مشاهده میشوند.
تا به حال، تجزیه و تحلیل تابش خورشیدی عمدتا برای ساختمان ها به منظور برآورد پتانسیل تولید انرژی خورشیدی انجام می شود. با این حال، این همچنین می تواند برای شبیه سازی اثرات جزیره گرمایی شهری یا محلی ناشی از تابش خورشید استفاده شود. بورنشتاین [ 81 ] اثر جزیره گرمایی شهری را در شهر نیویورک مورد بحث قرار داد که تفاوت های قابل توجهی را در دما در داخل و اطراف منطقه شهری شهر نشان می دهد. ویلنبورگ و همکاران [ 2 ] روشی را برای تخمین پتانسیل خورشیدی در مقیاس بزرگ بر اساس مدلهای شهر سه بعدی معنایی ارائه شده در CityGML ارائه کرد. این ابزار در حال حاضر با استفاده از LoD2 Buildings در ترکیب با اشیاء فضای خیابانی، آزمایش شده است و تابش جهانی، پراکنده و مستقیم را تخمین میزند. شکل 17نتیجه این شبیه سازی تابش خورشیدی را نشان می دهد. مدل شهر با توجه به مقادیر تابش جهانی (کیلووات ساعت / a)، از آبی (مقادیر تابش کم) تا سبز تا قرمز (مقادیر تابش بالا) بافت شده است. این نوع تجسم برای تجزیه و تحلیل سریع و شهودی مناطق مناسب برای نصب سیستمهای فتوولتائیک یا در مورد خیابانها، مکانیابی جزایر گرمایی محلی یا مکانهای سایهدار مفید است [82 ] . به منظور امکان تجزیه و تحلیل عمیقتر، همه مقادیر محاسبهشده تابش و همچنین ویژگیها، مانند «ضریب نمای آسمان» (SVF)، نیز بهعنوان ویژگیهایی برای هر شی شهر منفرد ذخیره میشوند. به عنوان مثال، حداکثر SVF برای سه مکان انتخاب شده (پلازای باز (1)، سقف ساختمان Flatiron (2)، پارکینگ حیاط خلوت (3)) نشان داده شده است. Bui and White [ 83] تحقیقات مرتبطی را با محاسبه طول و شکل سایههایی که ساختمانها در شهر نیویورک برای زمانهای مختلف در طول سال ایجاد میکنند، انجام داد. مدلهای فضای خیابانی شهر نیویورک (شامل تحلیلهای پتانسیل خورشیدی)، ملبورن، گرافینگ (شامل شبیهسازی ترافیک)، اینگولشتات، و دموی مفهومی CityGML 3.0 در اطراف منطقهای از TU مونیخ را میتوان به صورت تعاملی از طریق پیوند زیر کاوش کرد ( https: // wiki.tum.de/display/gisproject/Online+Demo+Collection ). دادههای مدلهای فضای خیابان نیویورک و ملبورن را میتوانید در صفحه ویکی پروژه ( https://wiki.tum.de/display/gisproject/Download+Section ) دانلود کنید.
8. خلاصه و چشم انداز
این مقاله طیف وسیعی از کاربردها را مورد بحث قرار میدهد که به نمایشهای سه بعدی دقیق از فضای خیابان نیاز دارند. به منظور پوشش الزامات تحمیل شده توسط بسیاری از موارد استفاده، توسعه و بهبود مدل حمل و نقل CityGML برای نمایش دقیق فضایی- معنایی فضای خیابان انجام شد. اشیاء حملونقل مانند جادهها، راهآهنها، مسیرها و آبراهها اکنون میتوانند در سه جزئیات موضوعی و هر کدام در چهار سطح مختلف از جزئیات هندسی نمایش داده شوند (LoD 0-3). در مدل جدید، هر سطح از دانه بندی می تواند یک نمایش ابری خطی، مساحتی، حجمی و نقطه ای داشته باشد. در حالی که دانه بندی = مساحت شامل یک نمایش تمایز نشده از فضای خیابان است، در دانه بندی = راه، سطوح خیابان به بستر جاده، پیاده رو و غیره تقسیم می شوند. به نمایندگی از کالسکه های فردی. در granularity = lane، خطوط رانندگی منفرد از نظر معنایی و فضایی از هم جدا میشوند و این مجموعه دادهها را برای ناوبری خودرو و شبیهسازیهای ترافیکی دقیق قابل استفاده میسازد.سوراخهایی در سطح اشیاء، به عنوان مثال، برای مدلسازی دهانههای خندق، آسیبهای جادهای، یا منهولها، معرفی میشوند. مشابه حفرهها ، علامتگذاریها میتوانند در چندین فضای ترافیکی (کمکی) قرار بگیرند و بنابراین به عنوان یک کلاس جداگانه مدلسازی میشوند. بخشها و تقاطعها به صراحت نشان داده میشوند و امکان مدلسازی یک خیابان به عنوان یک شی جاده متشکل از بخشها و تقاطعها را فراهم میکنند که به انواع مختلف طبقهبندی میشوند. علاوه بر این، هندسههای حجمی سه بعدی میتوانند فضاهای ترافیکی و خالی را در بالای سطوح ترافیکی نشان دهند. آبراه های تازه معرفی شدهاجازه نمایش ترافیک دریایی را می دهد. معرفی یک مفهوم سلف/جانشین امکان نمایش منطق ترافیک را فراهم می کند. برخی از مفاهیم توصیف شده با نمایش دقیق فضای خیابان برای شهر نیویورک نشان داده شده است. این مدل سه بعدی با استفاده از مجموعه داده های متعدد از فروشگاه داده های باز نیویورک تولید شد و در CityGML در صفحه اصلی پروژه ارائه شده است. علاوه بر این، تعدادی از برنامه های کاربردی مختلف برای مدل های دقیق فضای خیابان مورد آزمایش و تجزیه و تحلیل قرار گرفت. علاوه بر این، نمونههای نمایشی مدل فضای خیابانی برای ملبورن، گرافینگ در نزدیکی مونیخ، یک تقاطع پیچیده در اینگولشتات، و منطقهای در اطراف TU مونیخ تولید شد.
در آینده، اطلاعات با وضوح بسیار بالا در فضای خیابان، به دست آمده از داده های نقشه برداری تلفن همراه / اسکن لیزری، می تواند برای نمایش دقیق فضای خیابان استفاده شود. علاوه بر این، ابرهای نقطه اسکن لیزری می توانند به داده های CityGML غنی شده معنایی برای تجزیه و تحلیل یا اهداف تجسم منتقل شوند. ابرهای بزرگ نقطه سه بعدی را می توان با تبدیل داده ها به 3DTiles ( https://www.ogc.org/standards/3DTiles ) مشاهده کرد). این امکان مقایسه فوری داده های ابر نقطه ای را با ساختمان های جداگانه یا کل مدل های شهر فراهم می کند. یکی از دلایل انتخاب شهر نیویورک برای ایجاد یک مدل دقیق شهر و فضای خیابان، در دسترس بودن داده های باز (جغرافیایی) گسترده است. حجم فزاینده ای از داده ها و اطلاعات نیز برای شهرهای آلمان در دسترس است. اینکه چگونه می توان از این داده ها برای تولید مدل های دقیق (فضای خیابان) شهرهای آلمان استفاده کرد، موضوع پروژه های تحقیقاتی آینده خواهد بود. روش های استاندارد جمع آوری داده های فضای خیابان برای نمایش های خطی و منطقه ای، ایجاد مدل های قابل استفاده را آسان تر می کند. فقدان مفاهیم ارجاع خطی برای CityGML نیز بخشی از تحقیقات آینده است.
منابع
- بیلجکی، اف. استوتر، جی. لدوکس، اچ. زلاتانوا، اس. Çöltekin، A. کاربردهای مدل های شهر سه بعدی: بررسی وضعیت هنر. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2842-2889. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ویلنبورگ، بی. سیندرام، م. Kolbe، TH کاربردهای مدل های سه بعدی شهر برای درک بهتر محیط ساخته شده. در روندهای تحلیل و مدلسازی فضایی ; Springer: Cham, Switzerland, 2018; صص 167-191. [ Google Scholar ]
- بیل، سی. Kolbe، TH CityGML و خیابانهای نیویورک – پیشنهادی برای مدلسازی دقیق فضای خیابان. ISPRS Ann. فتوگرام. حسگر از راه دور اسپات. Inf. علمی 2017 ، IV-4/W5 ، 9-16. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کلبه، تی. برگر، بی. Cantzler، B. CityGML به برادوی می رود. فتوگرام هفته 2015 ، 15 ، 343-356. [ Google Scholar ]
- کوتزنر، تی. چاتورودی، ک. Kolbe، TH CityGML 3.0: توابع جدید برنامه های جدید را باز می کند. PFG J. Photogramm. سنسور از راه دور Geoinf. علمی 2020 ، 1-19. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بیل، سی. Kolbe، TH مدل سازی ترکیبی زیرساخت های حمل و نقل چندگانه در مدل های سه بعدی شهر و اجرای آن با استفاده از CityGML 3.0. ISPRS Ann. حسگر از راه دور عکس گرم. Inf. علمی 2020 ، IV-4/W5 ، 29-36. [ Google Scholar ] [ CrossRef ]
- شواب، بی. Kolbe، TH تحلیل های مورد نیاز مدل های فضای سه بعدی جاده برای رانندگی خودکار. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، IV-4/W8 ، 99-106. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شواب، بی. بیل، سی. Kolbe، مدلسازی فضایی-معنی جادهای TH برای شبیهسازی خودرو-عابر پیاده برای آزمایش سیستمهای رانندگی خودکار. پایداری 2020 ، 12 ، 3799. [ Google Scholar ] [ CrossRef ]
- پیگا، BEA; کاروسو، جی. فرائولی، آ. Mussone، L. سطح سناریوهای جاده جزئیات برای شبیه سازی رانندگی مجازی. در مجموعه مقالات سیستم های حمل و نقل SIDT2019 برای جوامع هوشمند، پایدار، فراگیر و ایمن، سالرنو، ایتالیا، 11 تا 13 سپتامبر 2019؛ صص 1-14. [ Google Scholar ]
- زلاتانوا، اس. یان، جی. وانگ، ی. دیاکیته، آ. ایسیکداغ، یو. سیتول، جی. Barton, J. Spaces in Spatial Science and Urban Applications — State of Art Review. ISPRS Int. J. Geo-Inf. 2020 ، 9 ، 58. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Beil, C. Detaillierte Repräsentation des Straßenraums in 3D-Stadtmodellen. پایان نامه کارشناسی ارشد، دانشگاه فنی مونیخ، مونیخ، آلمان، 2017. (به زبان آلمانی). در دسترس آنلاین: https://mediatum.ub.tum.de/node?id=1350734 (در 17 ژوئن 2020 قابل دسترسی است).
- لابتسکی، ا. ون گرون، اس. تامینگا، جی. لدوکس، اچ. Stoter, J. پیشنهادی برای یک مدل حمل و نقل بهبود یافته در CityGML. ISPRS Int. قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2018 ، XLII-4/W10 ، 89–96. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Boersma, F. مدلسازی سطوح مختلف جزئیات جاده ها و تقاطع ها در مدل های سه بعدی شهر. پایان نامه کارشناسی ارشد، دانشگاه صنعتی دلفت، دلفت، هلند، 2019. موجود به صورت آنلاین: https://repository.tudelft.nl/islandora/object/uuid%3Aebfc48f8-4704-47d3-9654-cd00c765e0af در 202 ژوئن (دسترسی به 27 ژوئن) .
- Tamminga، GF طراحی جدید زیرساخت حمل و نقل برای مدل های شبیه سازی ترافیک. Ph.D. پایان نامه، دانشگاه صنعتی دلفت، دلفت، هلند، 2019. موجود به صورت آنلاین: https://repository.tudelft.nl/islandora/object/uuid%3A35d2e152-0cfe-439e-a276-da4a69b11acd (دسترسی در ژوئن 12020).
- گرولر، اچ.-سی. استوبکایر، ای. اکسلسون، پی. Wikstrom، L. OGC زمین و زیرساخت استاندارد مدل مفهومی (LandInfra)، OGC 15-111. 2016. در دسترس آنلاین: https://www.ogc.org/standards/landinfra (در 17 ژوئن 2020 قابل دسترسی است).
- ISO 16739-1. در کلاس های بنیاد صنعت (IFC) برای به اشتراک گذاری داده ها در صنایع ساخت و ساز و مدیریت تاسیسات ؛ سازمان بین المللی استاندارد: ژنو، سوئیس، 2018.
- جاود، ش. دوناوبائر، آ. Borrmann، A. ارجاع جغرافیایی در IFC: یک رویکرد جدید برای اشیاء زیرساخت. در محاسبات در مهندسی عمران 2019: تجسم، مدلسازی اطلاعات و شبیهسازی ؛ انجمن مهندسین عمران آمریکا: Reston، VA، ایالات متحده آمریکا، 2019؛ صص 377-384. [ Google Scholar ]
- ISO 14825. در سیستم های حمل و نقل هوشمند – فایل های داده های جغرافیایی (GDF) – GDF5.0 ; استاندارد بین المللی؛ سازمان بین المللی استاندارد: ژنو، سوئیس، 2011.
- انجمن استانداردسازی سیستم های اتوماسیون و اندازه گیری eV (ASAM). ASAM OpenDRIVE — اطلاعات جاده پویا باز برای محیط خودرو، نسخه. 1.6. 2020. در دسترس آنلاین: https://www.asam.net/standards/detail/opendrive/ (در 17 ژوئن 2020 قابل دسترسی است).
- RoadXML—توضیحات شبکه جاده، مشخصات فرمت XML، نسخه 3.0.0. 2020. در دسترس آنلاین: https://www.road-xml.org/download/roadformatspec/RoadXML_FormatSpecification3.0.0.pdf (در 17 ژوئن 2020 قابل دسترسی است).
- فلندورف، ام. Vortisch, P. شبیهساز جریان ترافیک میکروسکوپی VISSIM. در مبانی شبیه سازی ترافیک ; Springer: New York, NY, USA, 2010; صص 63-93. [ Google Scholar ]
- Ruhdorfer, R. Kopplung von Verkehrssimulation und Semantischen 3D Stadtmodellen. پایان نامه کارشناسی ارشد، دانشگاه فنی مونیخ، مونیخ، آلمان، 2017. موجود به صورت آنلاین: https://mediatum.ub.tum.de/604993?query=ruhdorfer&show_id=1396796 (دسترسی در 17 ژوئن 2020).
- Rauh, J. OpenCRG – استاندارد باز جدید برای نمایش دادههای جاده سه بعدی با دقت بالا در وظایف شبیهسازی خودرو در جادههای ناهموار برای کنترل، راحتی سواری و تجزیه و تحلیل بار دوام. در مجموعه مقالات بیست و یکمین سمپوزیوم بین المللی دینامیک وسایل نقلیه در جاده ها و مسیرها IAVSD، استکهلم، سوئد، 17 تا 21 اوت 2009. ص 17-21. [ Google Scholar ]
- انجمن استانداردسازی سیستم های اتوماسیون و اندازه گیری eV (ASAM). ASAM OpenCRG، نسخه 1.1.2. 2018. در دسترس آنلاین: https://www.asam.net/standards/detail/opencrg/ (در 17 ژوئن 2020 قابل دسترسی است).
- انجمن استانداردسازی سیستم های اتوماسیون و اندازه گیری eV (ASAM). ASAM OpenScenario، نسخه 1.0.0. 2020. در دسترس آنلاین: https://www.asam.net/standards/detail/openscenario/ (در 17 ژوئن 2020 قابل دسترسی است).
- الهام بخشیدن. گروه کاری موضوعی حمل و نقل N.: D2.8.I.7 مشخصات داده در شبکه های حمل و نقل – دستورالعمل های فنی. نسخه 3.2. 2014. در دسترس آنلاین: https://inspire.ec.europa.eu/id/document/tg/tn (در 17 ژوئن 2020 قابل دسترسی است).
- هاکلی، م. Weber, P. OpenStreetMap: نقشه های خیابانی توسط کاربر. محاسبات فراگیر IEEE 2008 ، 7 ، 12-18. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هلبیچ، ام. آملونکسن، سی. نیس، پ. Zipf، A. تحقیقات در مورد دقت مکانی اطلاعات جغرافیایی داوطلبانه با استفاده از دادههای OpenStreetMap. In Proceedings of the GIScience 2010، زوریخ، سوئیس، 14-17 سپتامبر 2010. ص 14-17. [ Google Scholar ]
- گروگر، جی. کلبه، تی. ناگل، سی. هافله، K.-H. استاندارد رمزگذاری کنسرسیوم فضایی باز (OGC) زبان نشانه گذاری جغرافیای شهر (CityGML). OGC 12-019. 2012. در دسترس آنلاین: https://www.ogc.org/standards/citygml (در 17 ژوئن 2020 قابل دسترسی است).
- BASt. Objektkatalog für das Straßen-und Verkehrswesen، نسخه 2.019. Bundesanstalt für Straßenwesen. 2019. در دسترس آنلاین: https://www.okstra.de/docs/2019/html/index.htm (در 17 ژوئن 2020 قابل دسترسی است).
- BMVI. Anweisung Straßeninformationsbank Kernsystem نسخه 2.04. Bundesministerium für Verkehr und Digitale Infrastruktur. 2014. در دسترس آنلاین: https://www.bast.de/BAST_2017/DE/Publikationen/Regelwerke/Verkehrstechnik/Unterseiten/V-ASB.html (در 17 ژوئن 2020 قابل دسترسی است).
- ISO 19107. In Geographic Information—Spatial Schema ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2013.
- ISO 19107. در اطلاعات جغرافیایی – قوانین برای طرحواره کاربردی ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2015.
- گیلبرت، تی. رونزدورف، سی. پلوم، ج. سیمونز، اس. Nisbet، N. گرولر، HC; کلبه، تی. ون برلو، ال. مرسر، A. استانداردهای داده های محیطی ساخته شده و ادغام آنها: تجزیه و تحلیل IFC، CityGML و LandInfra . کنسرسیوم فضایی باز: Wayland، MA، USA. buildingSMART International: لندن، بریتانیا، 2020. [ Google Scholar ]
- پارک، SH; جانگ، Y.-H. Geem، ZW; لی، اس.-اچ. مدل اطلاعات جاده مبتنی بر CityGML برای بهینهسازی مسیر وسیله نقلیه برفزدایی. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 588. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Strassenburg-Kleciak، M. OpenStreetMap—Straßen als Flächen erfassen. در gis.Business 2/2016 ; دکتر med. گرد ویچمن: آفنباخ، آلمان، 2016. [ Google Scholar ]
- راس، ال. مدلهای شهر سه بعدی مجازی در مدیریت زمین شهری – فناوریها و کاربردها. Ph.D. پایان نامه، دانشگاه فنی برلین، برلین، آلمان، 2010. موجود به صورت آنلاین: https://depositonce.tu-berlin.de/handle/11303/3041 (دسترسی در 17 ژوئن 2020).
- سیندرام، م. Kolbe، TH مدلسازی اقدامات برنامهریزی شهری با تراکنشهای پیچیده بر روی مدلهای شهر سه بعدی معنایی. در مجموعه مقالات انجمن بینالمللی مدلسازی محیطی و نرمافزار (iEMSs)، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 15 تا 19 ژوئن 2014. در دسترس آنلاین: https://mediatum.ub.tum.de/doc/1224665/file.pdf (در 17 ژوئن 2020 قابل دسترسی است).
- دولنر، جی. Kleinschmit, B. Endbericht zum “Vorhaben Flächeninformationssysteme auf Basis virtueller 3D-Stadtmodelle”-REFINA3D/Deutsches Institut für Urbanistik—Forschungsbericht (به آلمانی). 2009. در دسترس آنلاین: https://docplayer.org/16160132-Endbericht-zum-refina-forschungsvorhaben-flaecheninformationssysteme-auf-basis-virtueller-3d-stadtmodelle.html (در 12 اکتبر 2020 قابل دسترسی است).
- بوک، اس. هینزن، ا. Libbe، J. Deutsches Institut für Urbanistik: Nachhaltiges Flächenmanagement—Ein Handbuch aus der Praxis. Ergebnisse aus der REFINA-Forschung (به آلمانی). 2011. در دسترس آنلاین: https://repository.difu.de/jspui/handle/difu/127284 (در 17 ژوئن 2020 قابل دسترسی است).
- ژائو، بی. سیلوا، ای. Soga، K. تخریب روسازی: یک مدل در مقیاس شهر برای سانفرانسیسکو، ایالات متحده. Proc. Inst. مدنی مهندس زیرساخت هوشمند ساخت و ساز 2018 ، 171 ، 93-109. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کلبه، تی. گروگر، جی. پلامر، L. CityGML. مدل های سه بعدی شهر و پتانسیل آنها برای واکنش اضطراری در فناوری اطلاعات مکانی برای واکنش اضطراری ; زلاتانوا، اس.، لی، ج.، ویرایش. CRC Press: Boca Raton، FL، USA، 2008; صص 257-274. [ Google Scholar ]
- بکر، تی. ناگل، سی. Kolbe، TH مدلسازی سه بعدی معنایی شبکه های چند ابزار در شهرها برای تجزیه و تحلیل و تجسم سه بعدی. در حال پیشرفت و روندهای جدید در علوم ژئو اطلاعات سه بعدی ; Springer: برلین/هایدلبرگ، آلمان، 2013; صص 41-62. [ Google Scholar ]
- بوشرت، اس. روزن، آر. دوقلوی دیجیتال – جنبه شبیه سازی. در آتی مکاترونیک ; Hehenberger, P., Bradley, D., Eds. Springer: Cham, Switzerland, 2016; صص 59-74. [ Google Scholar ]
- دمبسکی، اف. وسنر، یو. لتزگوس، ام. رودات، م. یامو، سی. دوقلوهای دیجیتال شهری برای شهرهای هوشمند و شهروندان: مطالعه موردی هرنبرگ، آلمان. پایداری 2020 ، 12 ، 2307. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- باتی، ام. دوقلوهای دیجیتال. محیط و برنامه ریزی ب. تحلیل شهری. علوم شهر 2018 ، 45 ، 817-820. [ Google Scholar ]
- ریشتر، آ. لونر، MO; Ebendt، R. شولز، ام. به سوی توسعه شهری یکپارچه با در نظر گرفتن سیستم های حمل و نقل هوشمند جدید: توسعه شهری با توجه به حمل و نقل جدید. فنی پیش بینی Soc. چانگ. 2020 ، 155 ، 119970. [ Google Scholar ] [ CrossRef ]
- رانت، بی. بیلدشتاین، اف. Kolbe، TH استفاده از مناظر سه بعدی مجازی برای آموزش راننده اضطراری. در مجموعه مقالات ارائه شده در کنفرانس IMAGE 2007، Scottsdale، AZ، ایالات متحده، 10-12 ژوئیه 2007. [ Google Scholar ]
- کلر، ا. کاتس، جی. چوچولوفسکی، اف. چوچولوفسکی، م. گریگوروپلوس، جی. اسپنگلر، ام. Busch, F. شبیه ساز دوچرخه برای تجربه شبیه سازی میکروسکوپی جریان ترافیک در محیط های شهری. در مجموعه مقالات بیست و یکمین کنفرانس بین المللی 2018 در سیستم های حمل و نقل هوشمند (ITSC)، مائوئی، HI، ایالات متحده آمریکا، 4 تا 7 نوامبر 2018؛ صفحات 3020–3023. [ Google Scholar ]
- بوتز، تی. احمان، م. فون استریک، او. Wolter، TM مدل سازی جاده واقعی برای شبیه سازی زمان واقعی دینامیک خودرو. ATZ در سراسر جهان 2004 ، 106 ، 11-13. [ Google Scholar ] [ CrossRef ]
- روهدوفر، آر. ویلنبورگ، بی. Sindram, M. Coupling of Traffic Simulations and Semantic 3D City Models. Gis. علمی 2018 ، 3 ، 101-109. [ Google Scholar ]
- ویلکی، دی. سیوال، جی. Lin, MC تبدیل داده های GIS به مدل های عملکردی جاده برای شبیه سازی ترافیک در مقیاس بزرگ. IEEE Trans. Vis. محاسبه کنید. نمودار. 2011 ، 18 ، 890-901. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چائو، کیو. بی، اچ. لی، دبلیو. مائو، تی. وانگ، ز. لین، ام سی؛ دنگ، زی. نظرسنجی در مورد شبیهسازی ترافیک بصری: مدلها، ارزیابیها و کاربردها در رانندگی خودمختار. محاسبه کنید. نمودار. انجمن 2019 ، 39 ، 287–308. [ Google Scholar ] [ CrossRef ]
- ویلر، بی. سیزدیکبایف، م. کریمی، ح. راعنان، جی. Yanbo, W. شخصیسازی راهیابی در دسترس برای افراد دارای معلولیت از طریق استانداردها و پلتفرمهای فضایی باز در شهرهای هوشمند. Geospat را باز کنید. نرم افزار داده ایستادن. 2020 ، 5 ، 1-15. [ Google Scholar ]
- بسانی، م. گراسو، ن. Piras، M. ارزیابی مبتنی بر GIS سه بعدی از فاصله دید موجود برای ارزیابی ایمنی جاده های شهری. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، XL-3/W3 ، 137–143. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- غسون، ی. Löwner، M.-O.; وبر، اس. بررسی مزایای مدلهای سه بعدی شهر در زمینه مدلسازی توزیع ذرات شهری – مقایسه نتایج مدل. در علوم زمین اطلاعات سه بعدی ; Springer: Cham, Switzerland, 2015; صص 193-205. [ Google Scholar ]
- برند، ال. لونر، M.-O. Parametrisierung und Identifikation urbaner Straßenkreuzungen im Kontext der Feinstaubmodellierung (به آلمانی). پارامترسازی و شناسایی تقاطع خیابانها در چارچوب مدلسازی ریزگردها. Gemeinsame Jahrestagung, DGPF Tagungsband 23/2014; 26–28 مارس 2014. در دسترس آنلاین: https://www.dgpf.de/src/tagung/jt2014/proceedings/index.html (در 12 اکتبر 2020 قابل دسترسی است).
- لو، ال. بکر، تی. لونر، M.-O. تجزیه و تحلیل سه بعدی نویز ترافیکی کامل بر اساس CityGML. در پیشرفت در ژئو اطلاعات سه بعدی ; Springer: Cham, Switzerland, 2017; ص 265-283. [ Google Scholar ]
- شولت، سی. Coors، V. توسعه CityGML ADE برای اطلاعات سیل سه بعدی پویا. در مجموعه مقالات کنفرانس مشترک ISCRAM-چین و GI4DM در مورد سیستم های اطلاعاتی برای مدیریت بحران، هاربین، چین، 4 تا 6 اوت 2008. [ Google Scholar ]
- امیرابراهیمی، س. رجبی فرد، ع. مندیس، پ. Ngo، T. یک مدل داده برای ادغام GIS و BIM برای ارزیابی و تجسم سه بعدی خسارت سیل به ساختمان. مکان 2015 ، 15 ، 10-12. [ Google Scholar ]
- فیوتک، جی. مارکس، سی. ویلکوم، پی. دوناوبائر، آ. Kolbe، TH Automatisierte Generierung eines digitalen Landschaftsmodells به صورت سه بعدی (به آلمانی). در PFGK18-Photogrammetrie-Fernerkundung-Geoinformatik-Kartographie ; Jahrestagung in München: München، آلمان، 2018; صص 888-902. در دسترس آنلاین: https://www.dgpf.de/src/tagung/jt2018/proceedings/start.html (در 12 اکتبر 2020 قابل دسترسی است).
- ISO 19152:2012. در مدل اطلاعات جغرافیایی – مدیریت زمین (LADM) ; سازمان بین المللی استاندارد: ژنو، سوئیس، 2012.
- لمن، سی. ون اوستروم، پی. Bennett, R. مدل دامنه مدیریت زمین. سیاست کاربری زمین 2015 ، 49 ، 535-545. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- استوتر، جی. والت، بی. لیتن، تی. پلا، م. وزنیاک، پی. کلنبرگر، تی. Ledoux, H. پیشرفته ترین نقشه برداری سه بعدی ملی در سال 2016. بین المللی. قوس. فتوگرام رم حس اسپات. Inf. علمی 2016 ، 41 ، 653. [ Google Scholar ] [ CrossRef ]
- گریستینا، اس. ایلول، سی. Scianna، A. توسعه یک سیستم کاداستر جاده ای سه بعدی: مقایسه الزامات قانونی و نیازهای کاربر. ISPRS Ann. فتوگرام از راه دور. حس اسپات. Inf. علمی 2016 ، 4 ، 223-231. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فوردا، ا. Vlacic، L. طراحی شی گرا از یک مدل جهانی برای وسایل نقلیه شهری خودمختار. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2010، La Jolla، CA، ایالات متحده آمریکا، 21-24 ژوئن 2010. ص 1054-1059. [ Google Scholar ]
- تامینگا، جی. ون دن برینک، ال. ون لینت، اچ. استوتر، جی. Hogendoorn, S. Towards towards GIS-Compliant Data Structures for Traffic and Transport Models. در هیئت تحقیقات حمل و نقل 92 اجلاس سالانه 2013 ; قابلیت همکاری داده های حمل و نقل: واشنگتن، دی سی، ایالات متحده آمریکا، 2013؛ پ. 18. [ Google Scholar ]
- کوتزنر، تی. حجازی، ط. Kolbe، مدلسازی معنایی TH شبکههای چند کاربردی سه بعدی برای تحلیلها و شبیهسازیهای شهری. بین المللی J. 3-D Inf. مدل. 2018 ، 7 ، 1-34. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کنسرسیوم فضایی باز CityGML SWG، مدل مفهومی CityGML3.0- مخزن GitHub. در دسترس آنلاین: https://github.com/opengeospatial/CityGML-3.0CM (در 17 ژوئن 2020 قابل دسترسی است).
- کوتزنر، تی. Kolbe، TH CityGML 3.0: Sneak preview. در PFGK18-Photogrammetrie-Fernerkundung-Geoinformatik-Kartographie ; Jahrestagung in München: München، آلمان، 2018; صص 835-839. در دسترس آنلاین: https://www.dgpf.de/src/tagung/jt2018/proceedings/start.html (در 12 اکتبر 2020 قابل دسترسی است).
- شربو، سی. اوپروتا، دی. Socaciu, L. رتبه بندی انواع تقاطع ها برای ارزیابی ایمنی عابران پیاده با استفاده از روش TOPSIS. لئوناردو الکترون. J. تمرین. تکنولوژی 2014 ، 25 ، 242-253. در دسترس آنلاین: https://lejpt.academicdirect.org/A25/242_253.pdf (در 17 ژوئن 2020 قابل دسترسی است).
- لونر، MO; گروگر، جی. بنر، جی. بیلجکی، اف. Nagel, C. پیشنهاد برای LoD جدید و مفهوم چند نمایندگی برای CityGML. ISPRS Ann. فتوگرام Remote Sens. Spatial Inf. علمی 2016 ، IV-2/W1 ، 3-12. [ Google Scholar ]
- چاتورودی، ک. اسمیت، CS; ژسکیر، جی. کوتزنر، تی. Kolbe، TH مدیریت نسخه ها و تاریخچه در مدل های معنایی شهر سه بعدی برای نسل بعدی CityGML. در پیشرفت در ژئو اطلاعات سه بعدی ; Springer: Cham, Switzerland, 2017; صص 191-206. [ Google Scholar ]
- چاتورودی، ک. Kolbe، TH Dynamizer-مدلسازی و پیادهسازی ویژگیهای پویا برای مدلهای شهری سه بعدی معنایی. در کارگاه Eurographics در مورد مدلسازی و تجسم داده های شهری ; انجمن یوروگرافیک: دلفت، هلند، 2015. [ Google Scholar ]
- کلبه، تی. یائو، ز. ناگل، سی. ردویک، آر. ویلکوم، پی. هوردا، جی. Müftüoglu، A. Kunde, F. 3D City Database for CityGML Version 3.3.0 Documentation. 2016. در دسترس آنلاین: www.3dcitydb.org (در 17 ژوئن 2020 قابل دسترسی است).
- یائو، ز. ناگل، سی. کونده، اف. هدرا، جی. ویلکوم، پی. دوناوبائر، آ. آدولفی، تی. Kolbe، TH 3DCityDB – یک راه حل پایگاه داده جغرافیایی سه بعدی برای مدیریت، تجزیه و تحلیل و تجسم مدل های شهری سه بعدی معنایی مبتنی بر CityGML. Geospat را باز کنید. داده، Softw. ایستادن. 2018 ، 3 ، 1-26. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- به زودی، KH; خو، مدلسازی VHS Citygml برای نقشه برداری ملی سه بعدی سنگاپور. ISPRS Int. قوس. فتوگرام از راه دور. حس اسپات. Inf. علمی 2017 ، 42 ، 37-42. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Robles-Ortega، MD; اورتگا، LM; کوئیلو، آ. فیتو، FR; De Sousa، A. مدل سازی خودکار سطح خیابان برای سیستم های اطلاعات شهری مبتنی بر وب. ج. طرح شهری. توسعه دهنده 2013 ، 139 ، 40-48. [ Google Scholar ] [ CrossRef ]
- Coduro، T. Straßenraummodellierung Mittels Mapping Mobile در OpenDRIVE و CityGML sowie Entwicklung Geeigneter Visualisierungsmethoden (به آلمانی). پایان نامه کارشناسی ارشد، دانشگاه فنی مونیخ، مونیخ، آلمان، 2018. موجود به صورت آنلاین: https://mediatum.ub.tum.de/1451954 (دسترسی در 17 ژوئن 2020).
- کیلار، PM; Biedermann، DH; Borrmann، A. MomentTUMv2: یک چارچوب شبیه سازی رفتار عابر پیاده مبتنی بر مدولار، توسعه پذیر و ژنریک . دانشگاه فنی مونیخ، گروه مهندسی عمران، زمین و محیط زیست: مونیخ، آلمان، 2016. [ Google Scholar ]
- بورنشتاین، RD مشاهدات اثر جزیره گرمایی شهری در شهر نیویورک. J. Appl. هواشناسی 1968 ، 7 ، 575-582. [ Google Scholar ] [ CrossRef ]
- چاتورودی، ک. ویلنبورگ، بی. سیندرام، م. تجزیه و تحلیل پتانسیل خورشیدی Kolbe، TH و ادغام نتایج شبیهسازی وابسته به زمان برای مدلهای شهری سه بعدی معنایی با استفاده از دینامایزر. در مجموعه مقالات دوازدهمین کنفرانس بین المللی اطلاعات جغرافیایی سه بعدی، ملبورن، استرالیا، 26 تا 27 اکتبر 2017؛ صص 25-32. [ Google Scholar ]
- بوئی، کیو. White, J. نقشه برداری از سایه های شهر نیویورک: هر ساختمان در هر بلوک. نیویورک تایمز، 21 دسامبر 2016. موجود به صورت آنلاین: https://www.nytimes.com/interactive/2016/12/21/upshot/Mapping-the-Shadows-of-New-York-City.html (دسترسی در 17 ژوئن 2020).
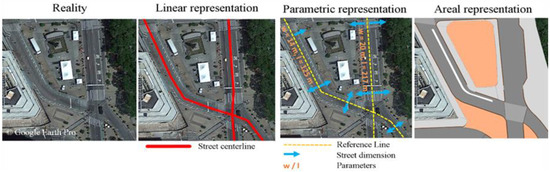
شکل 1. مقایسه انواع مختلف نمایش برای مدلسازی فضای خیابان [ 3 ].
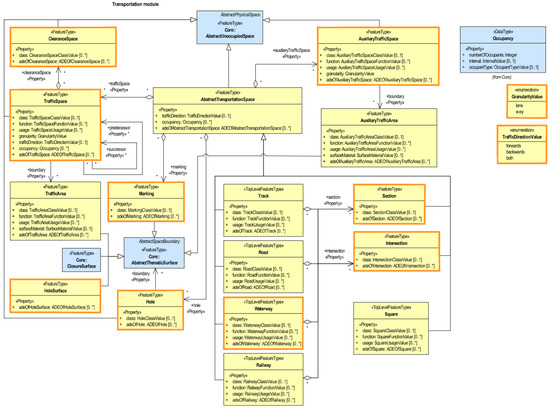
شکل 2. مدل حمل و نقل CityGML 3.0 که توسط OGC CityGML SWG [ 69 ] ارائه شده است. کلاس های جدید در مقایسه با CityGML2.0 با حاشیه های نارنجی مشخص شده اند.
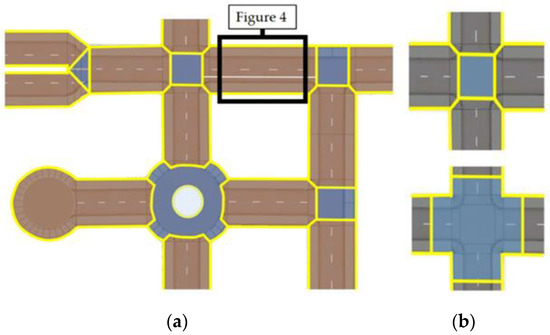
شکل 3. ( الف ) تقسیم بندی شبکه خیابان ها به بخش ها (نارنجی) و تقاطع ها (آبی). ( ب ) امکانات مختلف برای تعریف مناطق تقاطع.
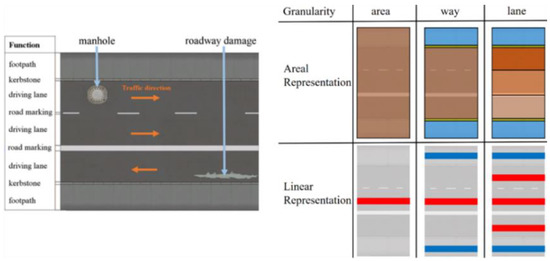
شکل 4. بخش خیابان در سطوح مختلف دانه بندی (نمایش مساحتی و خطی).
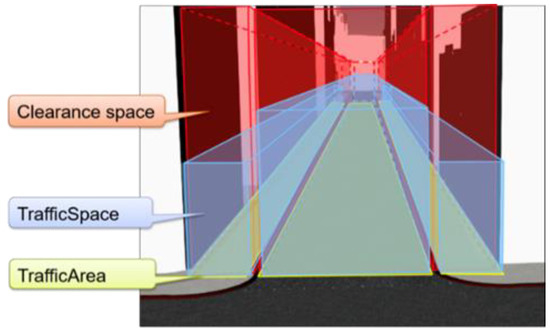
شکل 5. مفهوم فضایی برای اشیاء حمل و نقل در CityGML 3.0 [ 5 ].
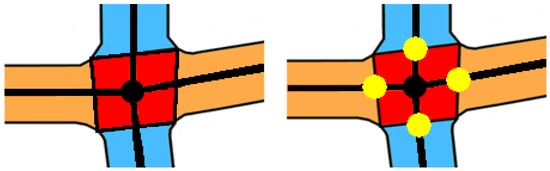
شکل 6. ناسازگاری بالقوه بین نمایش های خیابانی خطی و منطقه ای ( سمت چپ ) و راه حل پیشنهادی ( راست ).
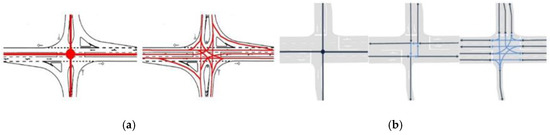
شکل 7. ( الف ) مقایسه نمایش های خطی در دانه بندی = مساحت و دانه بندی = خط. ( ب ) نمایش های خطی روابط سلف/جانشین.

شکل 8. روابط سلف / جانشین.
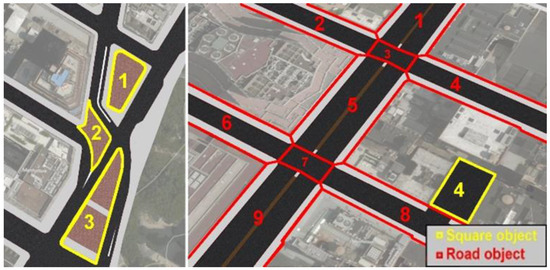
شکل 9. وابستگی بین ویژگی های سطح فرعی و سطح بالا CityGML 2.0.
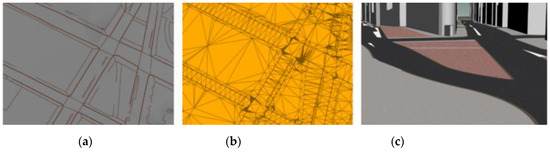
شکل 10. ( الف ) خطوط شکست شی در DEM، ( ب ) سطح مثلثی، ( ج ) نتیجه.
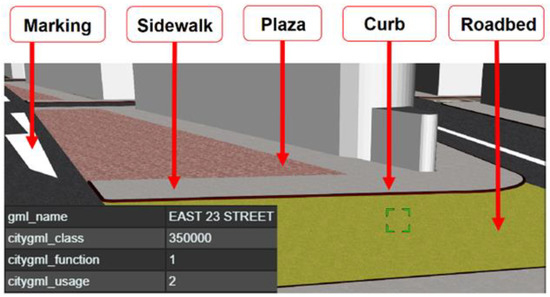
شکل 11. نمایش دقیق خیابان.
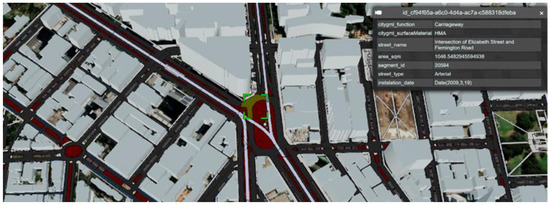
شکل 12. مدل فضای خیابان ملبورن (نزدیک تقاطع خیابان فلمینگتون و خیابان الیزابت).

شکل 13. مدل فضای خیابان شامل اشیاء مبلمان شهری تولید شده از داده های نقشه برداری موبایل و شبیه سازی ترافیک.
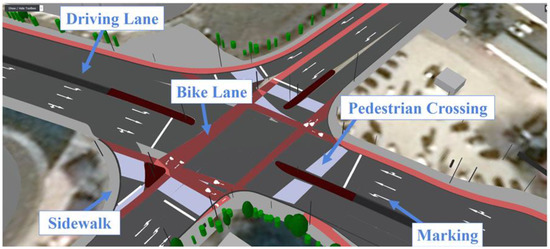
شکل 14. تقاطع پیچیده شامل Traffic Areas و علامت گذاری چند منظوره.
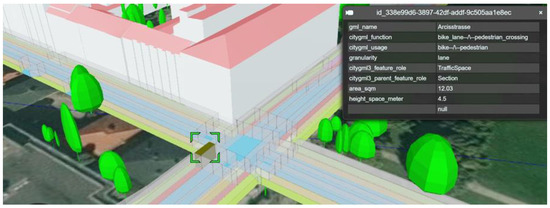
شکل 15. نمایش مفاهیم CityGML 3.0 برای منطقه ای در اطراف TU مونیخ.
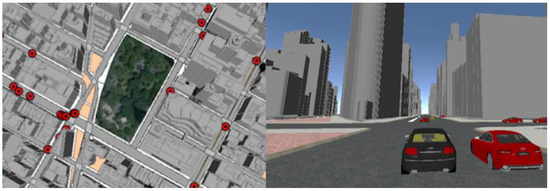
شکل 16. تجسم شبیه سازی ترافیک [ 22 ].
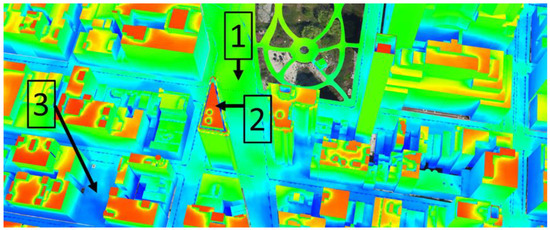
شکل 17. تجسم یک تخمین تابش جهانی (کیلووات ساعت در ساعت) برای ساختمان ها و اشیاء خیابانی حداکثر ضریب نمای آسمان: (1): 0.532، (2): 0.958، (3): 0.254.


بدون دیدگاه