1. معرفی
اینترنت اشیا (IoT) متشکل از میلیونها دستگاه است که حجم عظیمی از دادههای نقطهای مبتنی بر مکان را در مقیاس جهانی تولید میکنند. توسعه سریع دستگاههای اینترنت اشیاء مبتنی بر مکان (مانند حسگرها، تلفنهای هوشمند و وسایل نقلیه) منجر به پذیرش آنها در حوزههای کاربردی متنوعی مانند شهرهای هوشمند، حملونقل، انرژی و کشاورزی شده است تا الگوهای فضایی را بهتر درک کنند. و به دست آوردن بینش از دیدگاه فضایی. همانطور که [ 1 ] اشاره می کند، همه دستگاه های اینترنت اشیا در جایی در فضا قرار دارند و روابط فضایی بین آنها وجود دارد، که مکان را به یک جزء ضروری از داده های اینترنت اشیا تبدیل می کند. این امر محققان را بر آن داشته است تا یک پلتفرم IoT-GIS [ 2 ] طراحی کنند، پتانسیل استفاده از داده های اینترنت اشیا را برای تجزیه و تحلیل جغرافیایی بررسی کنند [2].3 ، حریم خصوصی مکان را برای خدمات و برنامه های کاربردی IoT مطالعه کنید [ 4 ]، و اینترنت اشیاء فضایی را پیشنهاد کنید [ 5 ].
با توجه به حجم، تنوع و دامنه جهانی دادههای نقطهای مبتنی بر مکان که توسط دستگاههای IoT تولید میشوند، علاقه جامعه Digital Earth در حال افزایش است. در [ 6 ] نویسندگان با بررسی اصطکاک ها و هم افزایی در ایجاد یک زیرساخت ترکیبی IoT-Digital Earth، رابطه در حال تکامل بین Digital Earth و IoT را خلاصه می کنند. زمین های دیجیتال از یک مدل سه بعدی از سطح زمین برای ارجاع داده های جغرافیایی (چه
داده های شطرنجی یا برداری) استفاده می کنند، زیرا نمایش واقعی تری ارائه می دهد که از بسیاری از مسائل مرتبط با طرح نقشه دو بعدی (مانند تکینگی های قطبی و نقشه جلوگیری می کند). تحریفات). شایان ذکر است که اساس چارچوبهای زمین دیجیتال مدرن، سیستمهای شبکه جهانی گسسته (DGGS) هستند [ 7 ، 8 ]].
DGGS ها یک کلاس از ساختارهای داده مکانی را نشان می دهند که از سلسله مراتبی از شبکه های جهانی با وضوح های متعدد تشکیل شده است که به موجب آن هر شبکه گسسته سازی سطح زمین به آرایش یکنواخت از سلول ها است [ 9 ]. یک DGGS معمولاً با تقسیم وجوه یک جامد افلاطونی به سلولهای مساحت مساحت (مثلث، چهار ضلعی یا شش ضلعی)، و سپس به طور معکوس آن سلولها را بر روی سطح کره یا بیضی با استفاده از برآمدگی مساحت ایجاد میکند [ 10 ]. این رویکرد توسط
کنسرسیوم فضایی باز (OGC) در سال 2017 به عنوان مبنایی برای مشخصات چکیده DGGS [ 11 ] اتخاذ شد.] که هدف آن استانداردسازی مدل DGGS است. نکته مهم این است که DGGS ها یک روش نمایه سازی را اتخاذ می کنند تا اطمینان حاصل شود که هر سلول دارای یک شاخص یا شناسه (ID) منحصر به فرد است که متعاقباً برای ارجاع داده های مکانی استفاده می شود [ 12 ]. علاوه بر این، یک شناسه سلولی میتواند هم موقعیت و هم وضوح فضایی را رمزگذاری کند که به یک سلول اجازه میدهد تا یک نقطه برداری، پیکسل شطرنجی یا سطل داده را نشان دهد. در نتیجه، DGGS ها داده های مکانی بزرگ را قادر می سازند تا با وضوح های مکانی مختلف در یک چارچوب سلسله مراتبی مشترک، جهانی، مقیاس پذیر، ذخیره، یکپارچه و مدیریت شوند [ 13 ، 14 ، 15 ، 16 ].
از منظر اینترنت اشیا، استفاده از سلول به عنوان یک سطل داده برای فهرستبندی و جمعآوری کارآمد حجم عظیمی از دادههای نقطهای که از دستگاههای اینترنت اشیا نشات میگیرد، بسیار سودمند است، زیرا خلاصهسازی، تجزیه و تحلیل و تجسم را در وضوحهای فضایی متفاوت تسهیل میکند، چیزی که محققان قبلاً شروع کردهاند. برای کاوش با توجه به داده های سنجش جمعیت [ 17 ] و داده های اشتراک گذاری سواری [ 18 ]. همچنین میتوانیم از یک سلول برای نشان دادن مکان نقطه یک دستگاه IoT استفاده کنیم. در واقع، طبق [ 19]، راه حل بهینه برای نشان دادن مکان نقطه در چارچوب Digital Earth در واقع بر اساس سلول های DGGS و شناسه های مربوط به آنها است، نه چند اعداد واقعی (یعنی مختصات طول و عرض جغرافیایی). در نتیجه، برای بهرهبرداری از دادههای اینترنت اشیا که در یک زمین دیجیتال جاسازی شدهاند، نیاز به عملیات فضایی سازگار با چارچوب DGGS ایجاد شده است.
Offsetting، همچنین به عنوان بافر شناخته می شود، یک عملیات فضایی اساسی از علم اطلاعات جغرافیایی است که معمولاً در برنامه های IoT استفاده می شود [ 3 ]. از یک زمینه اینترنت اشیا، ما عمدتاً نگران جابجایی نقطه هستیم زیرا به ما امکان می دهد منطقه را در فاصله معینی از مکان یک دستگاه اینترنت اشیا (مانند تلفن هوشمند یا وسیله نقلیه) تعیین و تجسم کنیم. آفستینگ همچنین میتواند با آزمایشهای داخلی/خارجی (که تعیین میکند نقطهای در ناحیه افست قرار دارد) ترکیب شود تا اطلاعات مکانی اضافی به دست آید. به عنوان مثال، در پلتفرم IoT-GIS طراحی شده توسط [ 2]، نویسندگان به طور گسترده از آزمونهای جابهجایی نقطه و درون/خارج (مثلاً برای یافتن ایستگاههای اتوبوس و تقاطعهای خیابان در شعاع مشخص از اتوبوس) برای انجام وظیفهای حیاتی در زمینهسازی دادههای اینترنت اشیاء تولید شده توسط وسایل نقلیه حملونقل به منظور درک بهتر حمل و نقل استفاده میکنند. رفتار – اخلاق. از منظر DGGS، تعیین سلولهایی که نشاندهنده یک منطقه افست در اطراف یک مکان دستگاه اینترنت اشیا هستند به ما این امکان را میدهد که مقادیر انبوه را در آن سلولها تجسم کنیم، دادههای مبتنی بر مکان را در آن سلولها جستوجو کنیم (مثلاً، آزمایشهای داخل/خارج)، نشاندهنده یک محله تحرک است. برای زمینه سازی داده های اینترنت اشیا، و حتی نشان دادن پوشش و عدم قطعیت داده های اینترنت اشیا (همانطور که در [ 20 ] اشاره شد).
با توجه به اهمیت جابجایی به عنوان یک عملیات فضایی و ظهور زمین دیجیتال به عنوان رویکردی برای مدیریت دادههای بزرگ مکانی، روشهایی اخیراً در [ 21 ] برای جبران منحنیهای برداری که در سلولهای یک DGGS کوانتیزه شده بودند، ارائه شد. تا جایی که ما می دانیم، این تنها کاری است که به بررسی افست کردن روی یک DGGS می پردازد و اگرچه کار آنها به طور صریح بر روی مناطق افست برای داده های نقطه ای تمرکز نمی کند، روش ها به عنوان نقاطی که منحنی های برداری را تشکیل می دهند قابل اجرا هستند. نویسندگان در کار خود، طول طولانیترین مورب در هر سلول را با وضوح مشخص محاسبه میکنند من، نشان داده شده است دg[من]و از این مقدار در ترکیب با فاصله بین مرکز سلولی به عنوان مبنایی برای تعیین اینکه آیا یک سلول در داخل یک منطقه افست قرار می گیرد یا خیر استفاده کنید. با این حال، اگر رویکرد معمولی ایجاد DGGS را در نظر بگیریم که از یک برجستگی مساحت مساوی برای پخش معکوس سلولها از سطح یک جامد افلاطونی به سطح کره/بیضی استفاده میکند، سپس تعیین میکنیم. دg[من]یک محدودیت بالقوه را ارائه می دهد زیرا اشکال سلول حفظ نمی شود. نویسندگان همچنین خاطرنشان می کنند که در حالی که دg[من]برای سلول های فرزند در یک سلسله مراتب متجانس بدون تغییر است (یعنی سلول های فرزند توسط سلول والد محصور می شوند، همانطور که برای سلول های مثلثی و چهار ضلعی صدق می کند)، این برای سلول های شش ضلعی درست نیست زیرا آنها دارای سلسله مراتب نامتجانس هستند. در نهایت، نویسندگان نمونههایی را در یک سیستم شبکهای سلسله مراتبی طول-طول جغرافیایی نشان میدهند، اما همانطور که قبلاً ذکر شد، این رویکرد معمولی برای ایجاد یک DGGS نیست.
از این رو، در این مقاله، روشهایی را ارائه میکنیم که با ساختار زیربنایی DGGSهای معمولی همسو هستند تا یک منطقه افست را در اطراف مکان نقطهای یک دستگاه اینترنت اشیا که به سلول یک DGGS کوانتیزه میشود، مدلسازی کنیم. تمرکز روششناسی ما با این واقعیت هدایت میشود که بلوکهای ساختمانی اساسی یک DGGS سلولهای آن هستند، که هر کدام یک شناسه منحصربهفرد دارند که میتوانند هم موقعیت و هم وضوح فضایی را رمزگذاری کنند. با در نظر گرفتن این موضوع، سهم اصلی ما در پیشنهاد روشهایی است که از ساختار نمایهسازی زیربنایی یک DGGS برای تعیین سلولها در یک منطقه افست در وضوحهای فضایی مختلف استفاده میکنند. به طور خاص، روش های پیشنهادی از همخوانی سلولی، هم ترازی هسته های سلولی، دستکاری شناسه سلولی، و عملیات بر روی شناسه های سلولی را برای تعیین کارآمد مجاورت سلول و روابط توپولوژیکی در حمایت از مدل سازی یک منطقه افست در اطراف محل یک دستگاه اینترنت اشیای ثابت، و همچنین مکان های متوالی یک دستگاه اینترنت اشیاء سیار (مانند تلفن هوشمند یا وسیله نقلیه) که هنوز در ادبیات مورد بررسی قرار نگرفته است. برای اهداف این مطالعه، ما بر روی rHEALPix DGGS تمرکز می کنیم (توضیح داده شده دربخش 2 ) که نشان دهنده یک DGGS منطبق با OGC است که از طریق رویکرد معمولی ایجاد شده است. همانطور که گفته شد، ما در مورد اینکه چگونه روش های پیشنهادی ممکن است برای سایر DGGS ها تطبیق یا اعمال شوند، بحث می کنیم.
ذکر این نکته حائز اهمیت است که در حالی که روش های افست ارائه شده در این مقاله برای هر مکان نقطه ای که در یک سلول DGGS کوانتیزه می شود مناسب است، ما به دلیل (i) انگیزه و تمرکز ویژه بر روی مکان نقطه دستگاه اینترنت اشیا داریم. تکثیر دستگاههای اینترنت اشیا و حجم عظیم دادههای نقطهای مبتنی بر مکان که متعاقباً تولید میشوند و (۲) علاقه فزاینده بین Digital Earth و IoT و استفاده بعدی از DGGS برای برآوردن نیازهای مهم نمایهسازی کارآمد، تجمیع، خلاصه، تجزیه و تحلیل و تجسم داده های اینترنت اشیا در وضوح های مکانی متفاوت. بنابراین، روشهای پیشنهادی در این مقاله روشهای جدیدی را برای بهرهبرداری از دادههای اینترنت اشیا که در چارچوب DGGS زیربنایی یک زمین دیجیتال تعبیه شده است، تسهیل میکند.
بقیه این مقاله به شرح زیر سازماندهی شده است: بخش 2 اطلاعات پس زمینه مرتبط در rHEALPix DGGS را بررسی می کند. در بخش 3 ، ما روشهایی را برای تعیین مجموعه سلولهایی که یک ناحیه استاتیک افست را با استفاده از یک رویکرد وضوح تک و یک رویکرد چند وضوح نشان میدهند، توصیف میکنیم. در بخش 4 ، ما مکانهای یک دستگاه اینترنت اشیاء سیار را در نظر میگیریم و روشهایی را برای مدلسازی منطقه افست موبایل با دستکاری شناسههای سلولی توضیح میدهیم. در بخش 5 ، ما نتایج مختلفی را ارائه میکنیم که با استفاده از روشهای پیشنهادی برای مدلسازی مناطق آفست استاتیک و متحرک تولید شدهاند. در بخش 6 ، مقاله را به پایان میرسانیم و دستورالعملهایی را برای کار آینده ارائه میکنیم.
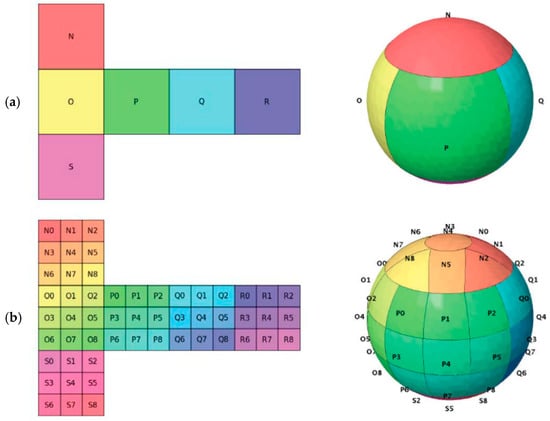
rHEALPix DGGS [ 22 ] یک DGGS چهار ضلعی منطبق بر OGC است که دارای ساختار سلولی سلسله مراتبی و متجانس، سلول های مساحت مساوی است که سطح زمین را در هر تفکیک پذیری کاملاً می پوشانند، و یک برآمدگی مسطح متشکل از شبکه های مربع تراز افقی-عمودی (به عنوان مثال در شکل 1 نشان داده شده است ). با پرتاب یک چرخش بیضی (مثلاً WGS84) بر روی وجوه روی یک مکعب، تقسیم هر وجه به یک شبکه مربعی با وضوح چندگانه، و سپس نمایش معکوس نتیجه بر روی سطح بیضی با استفاده از طرح ریزی مساحت rHEALPix ایجاد می شود. در این مطالعه ما از rHEALPix DGGS با استفاده می کنیم نسمنده=3(یعنی هر مربع مسطح به زیر تقسیم می شود 3×3مربع های فرعی در وضوح های متوالی، به شکل 1 مراجعه کنید ) زیرا (i) کوچکترین عدد صحیحی است که سلسله مراتب هم تراز را ایجاد می کند (یعنی هسته یک سلول والد همچنین هسته یک سلول فرزند است) و (ii) بوده است. تمرکز کار موجود، به ویژه با توجه به روش های تعیین مجاورت سلول و روابط توپولوژیکی با دستکاری شناسه های سلولی [ 23 ].
هر سلول rHEALPix DGGS یک شناسه منحصر به فرد دارد که به عنوان رشته ای تعریف می شود که با یکی از حروف شروع می شود. ن،اس،O،پ،س،آربه دنبال آن دنباله ای از صفر یا بیشتر از اعداد صحیح 0،1،2،…،نسمنده2-1[ 22 ]. به منظور اختصاص یک شناسه منحصر به فرد به هر سلول، سلول های مسطح در وضوح من=0شناسنامه ها به آنها اختصاص می یابد ن،O،پ،س،آر،اساز بالا به پایین و از چپ به راست ( شکل 1 الف). سپس، برای هر قطعنامه منسلول با شناسه تی، وضوح آن من+1به سلول های فرعی شناسه اختصاص داده می شود تی0، تی1، تی2، …،تی(نسمنده2-1)با استفاده از a زمنحنی پر کردن فضا از بالا به پایین و از چپ به راست ( شکل 1 ب). دو مزیت این رویکرد شامل (i) استفاده از شناسه سلول برای تعیین وضوح یک سلول توسط |منD|-1، و (ii) تعیین روابط والد-فرزند با استفاده از عملیات کوتاه کردن و الحاق ساده در شناسههای سلولی. توجه داشته باشید که سلول های مسطح شناسه های مشترک با سلول های بیضی شکل مربوطه خود دارند. علاوه بر این، هر سلول مسطح دارای یک هسته است که به عنوان مرکز آن تعریف می شود. هسته سلول بیضی شکل به سادگی برآمدگی معکوس هسته سلول مسطح مربوط به آن است.
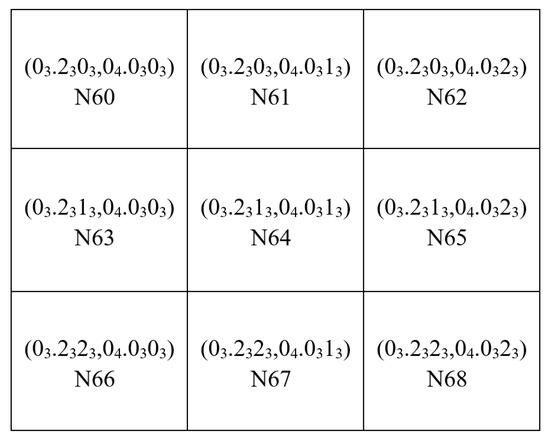
در نهایت، rHEALPix DGGS دارای یک ساختار نمایه سازی سلولی است که به ما امکان می دهد مجاورت سلول را مستقیماً از شناسه های سلولی تعیین کنیم [ 23 ]. با در نظر گرفتن هر رقم عددی در شناسه سلول به عنوان a بآسه3تاپلی که دو رقم آن اعداد سطر و ستون در والد هستند، میتوانیم شناسه سلولهای مجاور را با استفاده از بآسه3ریاضی روی اعداد سطر و ستون رقم در وضوح مورد نظر. به عنوان مثال، اگر بخواهیم سلول های مجاور سلول را بشناسیم ن64، ابتدا تبدیل می کنیم ن64به row،جoلتومترnنمادگذاری (همانطور که در بخش 4 [ 23 ] توضیح داده شد) که نشان می دهد (03.2313،04.0313). سپس، جمع یا تفریق می کنیم .0313به شماره ردیف و/یا ستون بر این اساس برای تعیین هشت سلول همسایه در row،جoلتومترnنمادگذاری ( شکل 2 ). در نهایت، ما به سادگی تبدیل می کنیم row،جoلتومترnنماد بازگشت به شناسه سلول
3. مناطق آفست استاتیک
یک دستگاه اینترنت اشیاء ثابت (مانند یک کنتور آب هوشمند یا پارکومتر هوشمند) را در نظر بگیرید که با یک مکان نقطه ای روی سطح زمین و یک ناحیه افست در شعاع دلخواه در اطراف این نقطه که با استفاده از مختصات طول و عرض جغرافیایی در یک چارچوب مرجع بیضی شکل نشان داده شده است، در نظر بگیرید. (مانند WGS84). برای مدلسازی این نقطه و ناحیه افست روی rHEALPix DGGS (یا هر DGGS)، باید نقطه را به یک سلول با وضوح دلخواه تبدیل کنیم و سپس به طور موثر تعیین کنیم که کدام سلولهای اطراف ناحیه افست را نشان میدهند. کمی کردن یک نقطه در یک سلول در rHEALPix DGGS یک فرآیند ساده با استفاده از روش داخلی است (شرح شده در [ 22]) که شناسه منحصر به فرد سلول وضوح مورد نظر را که حاوی نقطه است محاسبه می کند. تعیین کارآمد سلولها برای نشان دادن ناحیه افست کمتر بیاهمیت است، زیرا: (1) ما باید فضای جستجوی سلولها را محدود کنیم تا هر سلول در شبکه بیضی شکل با وضوح دلخواه برای گنجاندن بررسی نشود و (2) باید سطح منحنی بیضی را در نظر بگیرید و اطمینان حاصل کنید که مجموعه سلول های بیضی شکل به طور دقیق ناحیه افست را نشان می دهد [ 21 ].
در اینجا روشهایی را ارائه میکنیم که شناسههای سلولی را دستکاری میکنند و از ساختار نمایهسازی زیربنایی استفاده میکنند تا: (1) فضای جستجوی سلولهایی را که باید برای گنجاندن در ناحیه افست بررسی شوند، محدود میکنند، (ب) تعیین محدودیت سلول در منطقه افست، (iii) انجام عملیات مجموعه کارآمد بر روی شناسه های سلولی، و (iv) محاسبات پرهزینه ژئودتیک را محدود می کند. ابتدا، ما وظیفه تعیین مجموعه سلولهایی را که یک ناحیه استاتیک آفست را با استفاده از یک رویکرد تفکیک پذیری واحد نشان میدهند ( بخش 3.1 ) در نظر میگیریم و سپس رویکردهایی را در نظر میگیریم که از سلسلهمراتب رزولوشن چندگانه rHEALPix DGGS ( بخش 3.2 ) استفاده میکنند.
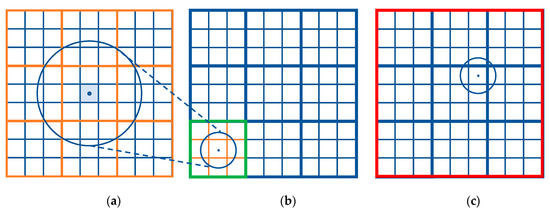
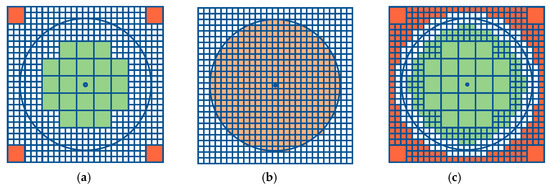
یک نکته را در نظر بگیرید پکه در یک سلول کوانتیزه شده است جدر وضوح منو ناحیه افست دایره ای آکه می خواهیم با استفاده از مجموعه ای از سلول ها مدل سازی کنیم سیدر وضوح من( شکل 3 الف). برای محدود کردن فضای جستجوی سلولها، ابتدا میتوانیم کوچکترین سلول مرزی را تعیین کنیم بجکه شامل آ( شکل 3 ب) با مقایسه شناسه های سلول مختصات جعبه مرزی طول و عرض جغرافیایی آاز وضوح 0به ∞تا زمانی که آنها مخالفت کنند (همانطور که در بخش 9 [ 22 ] توضیح داده شد). سپس، به دلیل ساختار سلولی هماهنگ rHEALPix DGGS، میتوانیم به سادگی از عملیات الحاق والد-فرزند در شناسههای سلولی برای تعیین شناسههای هر سلول در وضوح استفاده کنیم. مندر داخل بجکه باید برای درج در آن بررسی شود سی. اگرچه این فرآیند ساده است، اما مشکلات زمانی ایجاد می شود بجبه طور قابل توجهی بزرگتر از آ( شکل 3 ج) زیرا به معنای بررسی تعداد بسیار زیادی از سلول ها برای گنجاندن است. این ناشی از آسلولهای پوشانندهای که والدین متفاوتی در وضوحهای درشتتر دارند (به دلیل ساختار نمایهسازی ثابتی که روابط سلسله مراتبی والد-فرزند را تعریف میکند) و بنابراین اجتنابناپذیر است.
برای کاهش فضای جستجو به اندازه قابل مدیریت و قابل پیش بینی تر که تحت تأثیر سلول های پوشیده از آ، پیشنهاد می کنیم از مختصات جعبه مرزی طول و عرض جغرافیایی استفاده کنیم آبرای تعیین یک شبکه مرزی مستطیلی از سلول ها بدر وضوح منکه حاوی آ( شکل 4 الف). برای انجام این کار، ما چهار جفت مختصات طول و عرض جغرافیایی را می گیریم که نشان دهنده جعبه مرزی است. آ، و آنها را با وضوح به شناسه سلول مربوطه خود تبدیل کنید من. سپس شناسه های سلولی را به row،جoلتومترnعلامت گذاری کنید و حداقل و حداکثر مقدار سطر و ستون را تعیین کنید. با استفاده از این محدوده از مقادیر، ما به راحتی می توانیم تمام سلول های تشکیل دهنده را تعیین کنیم بکه در row،جoلتومترnنماد، که در نهایت آن را به شناسه سلولی تبدیل می کنیم.
اگرچه این رویکرد فضای جستجوی سلولهایی را که باید برای درج در آن بررسی شوند، محدود میکند سی، ممکن است همچنان با مشکل بررسی تعداد زیادی سلول روبرو شویم، به خصوص اگر اندازه سلول در وضوح مننسبت به اندازه کوچک است آ. برای کاهش این مشکل، می خواهیم یک شبکه داخلی مستطیلی از سلول ها را تعیین کنیم مندر وضوح منکه به طور کامل در داخل هستند آ( شکل 4 ج)، به طوری که ما می توانیم به طور خودکار این سلول ها را وارد کنیم سیبدون انجام بررسی های بیشتر برای انجام این کار، جفت مختصات طول و عرض جغرافیایی چهار نقطه در مرز را محاسبه می کنیم. آبا استفاده از مختصات پ، شعاع آ، و آزیموت ها {45درجه، 135درجه، 225درجه، 315درجه}. این چهار آزیموت در این مطالعه بر اساس این واقعیت انتخاب شده اند که بزرگترین مستطیل مسطح که توسط یک دایره احاطه شده است یک مربع است (که گفته شد، این آزیموت ها می توانند برای در نظر گرفتن شعاع بهینه شوند. آو سطح منحنی زمین در صورت تمایل). سپس چهار جفت مختصات طول و عرض جغرافیایی را به شناسه سلولی مربوطه در وضوح تبدیل می کنیم من. نکته مهم، از آنجایی که یک نقطه در جایی در سلول کوانتیزه شده آن قرار دارد، مشاهده می کنیم که هر یک از چهار سلول دارای یک همسایه راس نزدیکتر به سلول هستند. جکه باید به طور کامل در آن گنجانده شود آ( شکل 4 ب). با دانستن این موضوع، میتوانیم (i) هر ID سلول را به آن تبدیل کنیم row،جoلتومترnعلامت گذاری و (ii) استفاده بآسه3ریاضی روی مقدار سطر و/یا ستون بر این اساس برای تعیین مقدار row،جoلتومترnعلامت گذاری سلول به صورت مورب نزدیکتر به ج. سپس، میتوانیم حداقل و حداکثر مقادیر سطر و ستون را تعیین کنیم و از این محدودهها برای به دست آوردن تمام سلولهایی که شامل منکه در row،جoلتومترnنماد، که در نهایت آن را به شناسه سلولی تبدیل می کنیم.
اکنون که سلول های تشکیل دهنده را می دانیم بو من، تنها سلول هایی که باید برای درج در آن بررسی شوند سی، آنهایی هستند که در مجموعه هستند ب-من. آخرین مرحله تصمیم گیری در مورد معیاری برای تعیین اینکه آیا یک سلول باید در آن گنجانده شود یا خیر است سییا نه. به عنوان مثال، ما می توانیم تمام سلول های مجموعه را انتخاب کنیم ب-منکه منطقه افست را قطع می کنند آ، که به طور کامل در آ، یا هسته های آن در آ. اگر چه هر سه رویکرد همگرا به آبه عنوان رزولوشن منافزایش می یابد، ما دومی را انتخاب می کنیم زیرا یک محاسبه فاصله ژئودتیکی (از پبه هسته سلول) می تواند یک سلول را به عنوان موجود طبقه بندی کند سییا خیر، که به محدود کردن محاسبات پرهزینه ژئودتیک کمک می کند ( شکل 4 مجموعه نهایی سلول ها را نشان می دهد. سیکه نمایندگی می کنند آ). توجه داشته باشید که ما با استفاده از مختصات ژئودتیکی نشان می دهیم پدر محاسبه فاصله به جای نقطه مرجع سلول کوانتیزه شده آن (یعنی هسته ج) زیرا (i) بازیابی داده های برداری اصلی برای یک نقطه امکان پذیر است، بر خلاف منحنی های برداری عظیم یا چند ضلعی (همانطور که در [ 21 ] مشخص شده است)، و (ii) سلول های موجود را به دقت تعیین می کند. سیو از اختلافات ناشی از استفاده از هسته جلوگیری می کند ج، به ویژه در وضوح های درشت. با این حال، اگر بخواهیم از بازیابی مختصات ژئودزیکی اجتناب کنیم پ، سپس می توانیم (i) از هسته استفاده کنیم جاگر خطای کوانتیزاسیون در وضوح منقابل قبول است (مثلاً در وضوح های خوب)، یا (ii) کوانتیزه می شود پبه یک سلول جمتربا وضوح بهتر مترجایی که متر>منو خطای کوانتیزاسیون در وضوح مترقابل قبول است و سپس از هسته استفاده کنید جمتر. شبه کد برای انجام روش تک رزولوشن در الگوریتم 1 ارائه شده است.
| الگوریتم 1 . شبه کد برای انجام روش تک رزولوشن |
| ورودی: نقطه پ، شعاع افست r، وضوح من |
نتیجه: مجموعه ای از سلول ها سیکه منطقه افست را نشان می دهد
-
مقداردهی اولیه سی= خالی
-
شبکه مرزی مستطیلی سلول های B را با وضوح i که دارای ناحیه افست هستند، تعیین کنید
-
شبکه مستطیلی داخلی سلولهای I با وضوح i را که کاملاً در داخل ناحیه افست هستند، تعیین کنید
-
همه سلول ها را به آن اضافه کنید منبه سی
-
برای هر جهلل⊆(ب-من)انجام دادن
-
د= فاصله ژئودزیکی از هسته جهللبه پ(یا هسته از پسلول کوانتیزه شده)
-
اگر د≤r سپس
-
اضافه کنید جهللبه سی
-
پایان
-
پایان
-
برگشت سی
|
اگرچه رویکرد پیشنهادی با استفاده از rHEALPix DGGS مبتنی بر چهار ضلعی نشان داده شده است، تصور اینکه چگونه میتوان آن را برای DGGSهای مبتنی بر مثلث و شش ضلعی تطبیق داد، دشوار نیست. به عنوان مثال، اگر یک DGGS شش ضلعی را در نظر بگیریم، به جای تعیین یک شبکه مرزی مستطیلی از سلول ها بدر عوض میتوانیم از ساختار حلقهای ششضلعیهای همسایه برای تعیین حداقل حلقه مرزی استفاده کنیم، به طوری که شبکه سلولهای حاصل شامل آ. به طور مشابه، به جای تعیین یک شبکه داخلی مستطیلی از سلول ها من، ما می توانیم حداکثر حلقه داخلی را به گونه ای تعیین کنیم که تمام سلول ها به طور کامل در داخل قرار گیرند آ. یک مزیت جالب این رویکرد برای DGGS های شش ضلعی این است که حلقه های شش ضلعی همسایه به یک دایره نزدیکتر از یک شبکه مستطیلی مربع نزدیک می شوند، بنابراین مجموعه ب-منتأثیر بیشتری در محدود کردن تعداد سلول هایی که باید برای گنجاندن در آنها بررسی شوند، خواهد داشت سی.
3.2. چند رزولوشن
در اینجا ما در نظر می گیریم که چگونه می توان از سلسله مراتب چند وضوحی rHEALPix DGGS برای تعیین کارآمد مجموعه سلول ها استفاده کرد. سیدر رزولوشن های ریزتر (یا درشت تر) در نتیجه نیاز به تعیین از بین می رود سیاز ابتدا ابتدا، ما روشی را توصیف میکنیم که از ساختار سلولی متجانس (یعنی سلولهای فرزند توسط سلول والد محصور شدهاند) و عملیات کارآمد مجاورت سلول در شناسههای سلولی برای تعیین سلولها در سلولها استفاده میکند. سیهمانطور که وضوح از وضوح درشت افزایش می یابد منبه وضوح خوب j، جایی که j>من. دوم، روشی را برجسته میکنیم که از همترازی هستههای سلولی برای تعیین سلولهای درون استفاده میکند سیهمانطور که وضوح از وضوح خوب کاهش می یابد jبه وضوح درشت من.
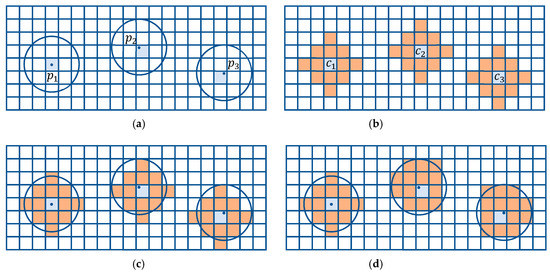
یک منطقه افست را در نظر بگیرید آ، شبکه مرزی مستطیلی سلول ها بمنکه حاوی آ،و مجموعه سلول ها سیمنکه نمایندگی می کنند آبا وضوح درشت من( شکل 5 الف). توجه داشته باشید که بمنبه فضای جستجوی اولیه سلول ها در وضوح اشاره دارد من. با این حال، در روش زیر فضای جستجو در وضوح من+1برابر نیست بمن+1، بنابراین فضای جستجوی سلول ها را مشخص می کنیم اسمنبه منظور جلوگیری از گیج شدن. برای تعیین مجموعه سلول ها سیمن+1که نمایندگی می کنند آ، ابتدا تمام سلول های موجود را تعیین می کنیم سیمنکه قطعا به طور کامل در آن گنجانده شده است آ( تصویر 5 د) که به ما اجازه می دهد تا سلول های فرزند آنها را به طور خودکار وارد کنیم سیمن+1. برای انجام این کار، چهار همسایه رأس یک سلول معین را تعیین می کنیم سیمن( شکل 5 ب) با استفاده از row،جoلتومترnنشانه گذاری و بآسه3ریاضیات (همانطور که در بخش 2 توضیح داده شد )، و بررسی کنید که آنها نیز در آن هستند سیمن(با استفاده از عملیات مجموعه کارآمد در شناسه های سلولی). همسایه های رأس را بررسی می کنیم زیرا (i) اگر هسته آنها داخل باشد آسپس رئوس سلول ها نیز همینطور هستند (از آنجایی که راس ها را محدود می کنند)، (ii) کارآمدتر از بررسی هر هشت همسایه است (که هسته های آنها راس ها را نیز محدود می کنند) و (iii) هسته های همسایه های لبه ممکن است لزوماً راس ها را محدود نکنند. به خصوص نزدیک به مرز آ). بنابراین، اگر همه همسایههای راس داخل باشند سیمن، نتیجه می گیریم که سلول داده شده باید به طور کامل در آن موجود باشد آ.
در مرحله بعد، تمام سلول های موجود را تعیین می کنیم اسمن-سیمنکه قطعاً کاملاً بیرون هستند آ( شکل 5 د) با استفاده از یک رویکرد مشابه، با این تفاوت که بررسی می کنیم که همسایه های رأس در داخل نیستند سیمن( شکل 5 ج). این سلولها و تمام سلولهای فرزندشان، بهعنوان خارج از آن مشخص شدهاند آ. سلول های باقی مانده در وضوح “سلول های حاشیه” نامیده می شوند من( شکل 5 د)، نشان داده شده است افمن، زیرا نزدیک به مرز قرار دارند آو سلول های فرزند مربوطه آنها ممکن است داخل باشند یا نباشند سیمن+1. مرحله بعدی این است که تمام سلول ها را به زیر تقسیم کنید افمنبا استفاده از عملیات ساده الحاق والد-فرزند در شناسه های سلولی، برای تعیین فضای جستجوی جدید سلول ها اسمن+1( شکل 6 الف). در نهایت، ما محاسبه فاصله ژئودتیکی را برای تمام سلولها انجام میدهیم اسمن+1برای تعیین سلول های تشکیل دهنده سیمن+1( شکل 6 ب). اگر بخواهیم مجموعه سلول ها را تعیین کنیم سیمن+2 ، سیمن+3، …، سیjکه نمایندگی می کنند آ، می توانیم به طور مکرر روند را تکرار کنیم. به عنوان مثال، برای تعیین مجموعه سلول ها سیمن+2 ، همه سلول ها را در آن پیدا می کنیم سیمن+1که قطعا به طور کامل در آن گنجانده شده است آو تمام سلول ها در اسمن+1-سیمن+1که قطعاً کاملاً بیرون هستند آ(با در نظر گرفتن سلول هایی که قبلاً به عنوان کاملاً داخل یا خارج علامت گذاری شده بودند آ). از اینجا می توانیم سلول های حاشیه ای را تعیین کنیم افمن+1( شکل 6 ج). سپس میتوانیم سلولها را در آن تقسیم کنیم افمن+1شکل دادن اسمن+2و متعاقباً این سلول ها را برای گنجاندن در آنها آزمایش کنید سیمن+2. شبه کد برای انجام روش چند تفکیک پذیری در الگوریتم 2 ارائه شده است.
| الگوریتم 2 . شبه کد برای انجام روش چند وضوح |
| ورودی: نقطه پ، شعاع افست r، وضوح درشت من، وضوح خوب j، مجموعه اولیه سلول ها اسمنکه نمایانگر فضای جستجو، مجموعه اولیه سلول ها است سیمنکه منطقه افست را نشان می دهد |
نتیجه: مجموعه ای از سلول ها سیjکه منطقه افست را نشان می دهد
-
تابع MultiresMethod (سیمن، اسمن، من)
-
با استفاده از مجاورت سلول، سلول های موجود را تعیین کنید سیمن⊆اسمنکه کاملاً در داخل منطقه افست هستند
-
با استفاده از مجاورت سلول، سلول های موجود را تعیین کنید اسمن-سیمنکه کاملاً خارج از منطقه افست هستند
-
افمن= سلول های باقی مانده در اسمن
-
اسمن+1= سلول های کودک از افمن
-
مقدار دهی اولیه کنید سیمن+1= خالی
-
برای هر جهلل⊆اسمن+1 انجام دادن
-
د= فاصله ژئودزیکی از هسته جهللبه پ(یا هسته از پسلول کوانتیزه شده)
-
اگر د≤r سپس
-
اضافه کنید جهللبه سیمن+1
-
پایان
-
پایان
-
سلولهای فرزند همه سلولهایی که قبلاً بهعنوان کاملاً در داخل منطقه افست علامتگذاری شدهاند را به آن اضافه کنید سیمن+1
-
اگر من+1=j سپس
-
سیj=سیمن+1
-
برگشت سیj
-
دیگر
-
MultiresMethod( سیمن+1، اسمن+1، من+1)
|
به طور کلی، با محدود کردن فضای جستجو به سلولهای فرزند سلولهای حاشیهای، میتوانیم تعداد محاسبات پرهزینه فاصله ژئودتیکی را محدود کرده و سلولهای موجود را به طور موثر تعیین کنیم. سیدر رزولوشن های دقیق تر علاوه بر این، با استفاده از مجاورت سلولی به عنوان مبنایی برای تعیین محدودیت سلولی در آ، می توانیم از دستکاری شناسه سلولی استفاده کنیم و عملیات مجموعه کارآمد را روی شناسه های سلولی انجام دهیم. در نهایت، با استفاده از همخوانی سلولی و ساختار نمایه سازی زیربنایی، میتوانیم به طور خودکار سلولهای فرزند را وارد کنیم (یا حذف کنیم) سیدر وضوح های بهتر با استفاده از عملیات الحاق کارآمد والد-فرزند در شناسه های سلولی. توجه داشته باشید که در مورد دومی، اگر فقط سلول والد را وارد کنیم سیدر رزولوشنهای دقیقتر و نه سلولهای فرزند مربوطه، میتوانیم یک منطقه افست را با استفاده از مجموعهای از سلولها با وضوح چندگانه مدلسازی کنیم. م. مهمتر از همه، ماز نظر هندسی معادل خواهد بود سیاز نظر مدل سازی آ، ولی مسلول های کمتری را شامل می شود سی(مخصوصاً در وضوح فزایندهای خوب) که اگر تعداد سلولها در سیدر وضوح خوب به شدت بزرگ می شود.
از نظر سازگاری با سایر DGGS ها، رویکرد پیشنهادی می تواند برای DGGS های مثلثی اعمال شود زیرا آنها همخوانی سلولی را نیز نشان می دهند. DGGS های شش ضلعی (که دیافراگم 3، 4، و 7 محبوب ترین هستند) سلسله مراتب نامتجانس دارند، اما این امر اعمال رویکردهای چند وضوحی بر اساس همخوانی سلولی را دشوارتر می کند. هرچند جالب توجه است که رویکرد پیشنهادی ترکیب مجاورت سلولی به عنوان مبنایی برای مهار سلول در آبا هسته های سلولی به عنوان پایه ای برای گنجاندن در سی، به نظر می رسد با دیافراگم 7 شش ضلعی DGGS سازگار است. در این نوع از DGGS شش ضلعی، شکل شش ضلعی یک سلول والد با وجود اینکه به طور کامل در آن وجود ندارد، با هفت سلول فرزند آن نزدیک است. قابل توجه، برای یک سلول معین تیدر وضوح من، هفت سلول کودک مربوطه در وضوح من+1دارای نقاط مرکزی هستند که در داخل آنها قرار دارند تی. بنابراین، مشاهده می کنیم که نقاط مرکزی شش سلول مجاور از تیدر وضوح مننه تنها رئوس را محدود می کند تی، بلکه رئوس تمام سلول های فرزند از تیدر هر وضوح بیشتر از من، همانطور که در مورد اشکال سلول های متجانس وجود دارد.
برای پایان دادن به این بخش، روشی را برای تعیین موثر سلولهای موجود در آن شرح میدهیم سیهمانطور که وضوح از وضوح خوب کاهش می یابد jبه وضوح درشت منبا استفاده از ویژگی تراز شده rHEALPix DGGS. ابتدا، از بخش 3.1 به یاد بیاورید که یک سلول در آن گنجانده شده است سیاگر هسته آن شامل شود آ. حال مجموعه سلول ها را در نظر بگیرید سیjکه نمایندگی می کنند آبا وضوح خوب j. به منظور تعیین سلول های موجود در سیj-1، می توانیم از این واقعیت استفاده کنیم که هسته یک سلول والد در تفکیک پذیری j-1در وضوح با هسته یک سلول کودک تراز است j. در rHEALPix DGGS با نسمنده=3، شناسه یک سلول فرزند تراز شده همیشه همان رشته شناسه سلول والد آن است به جز با عدد صحیح 4به انتها متصل شده است (که در شکل 1 قابل مشاهده است). در نتیجه، برای تعیین سلول های موجود در سیj-1، ما فقط باید همه شناسه های سلول را انتخاب کنیم سیjکه به 4 ختم می شود و سپس هر شناسه سلول را کوتاه می کنیم تا 4 حذف شود. این فرآیند می تواند به طور مکرر برای تعیین مجموعه سلول ها تکرار شود. سیj-2 ، سیj-3، …، سیمنکه نمایندگی می کنند آ. توجه داشته باشید که با پیگیری شناسههای سلولی که در هر وضوح به عدد 4 ختم نمیشوند، میتوانیم سطوح وضوح را به سادگی با الحاق و پیوست یا کوتاه کردن و حذف شناسهها از آن بالا و پایین کنیم. سی. متناوبا، به طور کلی، توجه می کنیم که اگر سیjمجموعه ای از سلول ها با وضوح خوب است j، سپس می توانیم مجموعه سلول های موجود را تعیین کنیم سیمندر هر قطعنامه منجایی که من<jبا (i) انتخاب تمام سلول های موجود در سیjکه رشته شناسه آن به پایان می رسد (j-من) 4’s و (ii) حذف 4از هر شناسه با کوتاه کردن رشته. از آنجایی که این روش بر اساس همترازی هستههای سلولی است، میتوان آن را برای DGGSهای مثلثی و شش ضلعی که در نقاط مرکز سلول با دستکاری شناسههای سلولی در یک راستا قرار دارند، اعمال کرد.

4. مناطق افست موبایل
در این بخش، روشهایی را برای مدلسازی یک منطقه افست در اطراف یک نقطه موبایل (مرتبط با مکان یک دستگاه اینترنت اشیاء سیار) که به سلول یک DGGS کوانتیزه میشود، ارائه میکنیم. این می تواند برای پرس و جو از سلول های نزدیک (به عنوان مثال، تست های داخل/خارج)، تجسم مقادیر انبوه در سلول های مجاور، یا نشان دادن یک محله تحرک برای متنی کردن داده های اینترنت اشیا مهم باشد. به عنوان مثال، یک دستگاه اینترنت اشیاء سیار مانند تلفن هوشمند یا وسیله نقلیه را در نظر بگیرید که یک جریان پیوسته از داده های نقطه ای مبتنی بر مکان را تولید می کند (مثلاً هر 5 ثانیه). در این سناریو، به طور مداوم مجموعه سلول ها را از ابتدا تعیین می کند سیدر وضوح منمدل سازی منطقه افست در اطراف هر نقطه ورودی ممکن است غیر عملی باشد (به عنوان مثال، اگر نرخ داده ورودی بالا باشد یا اگر مننشان دهنده وضوح خوب). بنابراین، ما روشهایی را ارائه میکنیم که شناسههای سلولی را مستقیماً برای تعیین سلولهای موجود در آن دستکاری میکنند سیدر اطراف هر نقطه جدید
مسیر یک دستگاه IoT موبایل را در نظر بگیرید که با یک سری زمانی از نقاط نشان داده شده است {پ1،…،پn}و سری مربوط به مناطق افست {آ1،…،آn}در شعاع دلخواه در اطراف هر کدام پکبا استفاده از مختصات طول و عرض جغرافیایی در یک چارچوب مرجع بیضی شکل (به عنوان مثال، WGS84) تعریف شده است. برای مدلسازی این سناریو روی rHEALPix DGGS، هر نقطه را کمیسازی میکنیم پکبه یک سلول جکبا وضوح مطلوب منبرای تعیین سری زمانی مربوط به سلول ها {ج1،…،جn}، جایی که |{ج1،…،جn}|برابر است با |{پ1،…،پn}|( شکل 7 الف). مرحله بعدی تعیین مجموعه ای از سلول ها است {سی1،…،سیn}در وضوح منکه مناطق افست را مدل می کند {آ1،…،آn}. به جای تعیین هر کدام سیکاز ابتدا می توانیم سلول های موجود را مشخص کنیم سی1و سپس شناسه های سلولی را مستقیماً دستکاری کنید تا به طور موثر مجموعه های متوالی سلول ها را تعیین کنید.
ابتدا اجازه دهید مدل سازی را در نظر بگیریم آکبا سلول هایی با وضوح خوب به طوری که خطای کوانتیزاسیون برای برنامه IoT قابل قبول تلقی شود (یعنی برای سیکبر روی آن متمرکز شود جک). در این حالت سلول های موجود را تعیین می کنیم سی1با استفاده از روش ایستا از بخش 3 که به موجب آن هسته (یعنی نقطه مرجع) از ج1در محاسبه فاصله ژئودتیکی استفاده می شود که تضمین می کند سی1متمرکز شده است ج1. سپس برای تعیین سلول های موجود در سی2، ابتدا سلول ها را تبدیل می کنیم ج1و ج2به row،جoلتومترnعلامت گذاری که به موجب آن مقادیر سطر و ستون از ج1و ج2نشان داده می شوند row1،جoل1و row2،جoل2به ترتیب. پس از آن، می توانیم مقادیر ترجمه را از آن محاسبه کنیم ج1به ج2استفاده كردن Δrow=row2-row1و Δجoل=جoل2-جoل1. سپس می توانیم درخواست دهیم Δrow،Δجoلبه مقادیر سطر و ستون هر سلول در سی1. در نهایت، ما می توانیم هر سلول را به داخل تبدیل کنیم row،جoلتومترnعلامت گذاری به شناسه سلول برای تعیین سلول های موجود در سی2. توجه داشته باشید که به دلیل سی1متمرکز شده است ج1، سی2نیز متمرکز خواهد شد ج2(و غیره برای همه سیک( شکل 7 ب). علاوه بر این، هر سلول در وضوح مندارای مساحت مساوی است بنابراین کل پوشش مساحت هر کدام سیکثابت باقی می ماند. برای تعیین سلول های موجود در سی3، می توانیم مقادیر ترجمه را از آن محاسبه کنیم ج2به ج3استفاده كردن Δrow=row3-row2و Δجoل=جoل3-جoل2، که سپس می توانیم آن را برای تمام سلول های موجود در آن اعمال کنیم سی2. تکرار این فرآیند برای هر جفت سلول متوالی در {ج1،…،جn}به ما این امکان را می دهد که به طور موثر یک منطقه افست تلفن همراه را با وضوح خوب مدل سازی کنیم.
حالا بیایید مدل سازی را در نظر بگیریم آکبا سلول هایی با وضوح درشت به طوری که خطای کوانتیزاسیون در وضوح منغیر قابل قبول است (یعنی ما می خواهیم سیکبر روی آن متمرکز شود پک). در این مورد، ما نمی توانیم به سادگی سلول های موجود را تعیین کنیم سیک+1بر اساس تغییر بین جک+1و جک، زیرا نادیده گرفتن تغییر واقعی بین پک+1و پکمنجر به اختلاف خواهد شد ( شکل 7 ج). در نتیجه، ما کمی کردن هر یک را پیشنهاد می کنیم پکبه یک سلول جکمتردر وضوح مترجایی که متر>منو خطای کوانتیزاسیون در وضوح متربرای برنامه IoT قابل قبول تلقی می شود. سپس می توانیم تعیین کنیم سی1مترکه در مرکز قرار دارد ج1متر. پس از آن، ما می توانیم مقادیر ترجمه بین را تعیین کنیم جک+1مترو جکمترکه سپس می تواند به تمام سلول های موجود در آن اعمال شود سیکمتربرای بدست آوردن سیک+1متر. در نهایت، میتوانیم از روش همترازی شرح دادهشده در بخش 3.2 برای تعیین سلولهای موجود استفاده کنیم سیک+1در وضوح من. این رویکرد هر یک را تضمین می کند سیکبا دقت بیشتری بر روی آن متمرکز شده است پک، البته با دقت نسبت به خطای کوانتیزاسیون در وضوح متر( شکل 7 د).
5. نتایج
در این بخش، ما نتایج متنوعی را ارائه میکنیم که با استفاده از روشهای پیشنهادی برای مدلسازی مناطق آفست استاتیک ( بخش 5.1 ) و مناطق افست متحرک ( بخش 5.2 ) تولید شدهاند.
5.1. مناطق آفست استاتیک
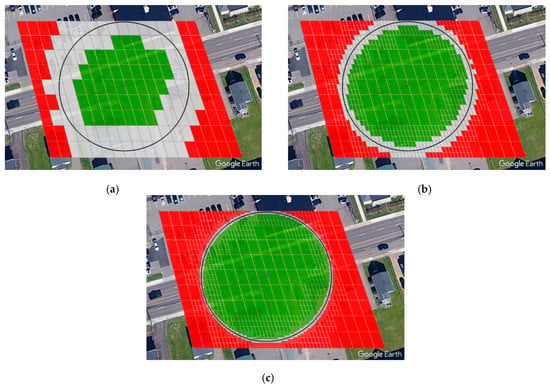
شکل 8 یک منطقه افست را با شعاع 30 متر در اطراف یک نقطه دلخواه در نیوبرانزویک، کانادا نشان می دهد که در سه وضوح متوالی مدل شده است (تجسم در Google Earth). شکل 8 a منطقه افست مدل شده با وضوح 13 ( ~6m عرض سلول بیضی) که نشان دهنده وضوح درشت است. شکل 8 b,c ناحیه افست مدل شده در وضوح 14 ( ~2m عرض سلول بیضی) و 15 ( ~0.5m عرض سلول بیضی) به ترتیب، که وضوح های متوالی ریزتری را نشان می دهند.
به یاد بیاورید که یک مزیت کلیدی روش چند وضوح محدود کردن فضای جستجو به سلولهای فرزند سلولهای حاشیه در وضوحهای متوالی است. برای نشان دادن این موضوع، شکل 9 سلول های حاشیه ای را برای منطقه افست از شکل 8 در وضوح 13، 14 و 15، همراه با سلول هایی که به عنوان کاملاً در داخل یا به طور کامل خارج از منطقه افست در وضوح های متوالی علامت گذاری شده اند نشان می دهد (در Google Earth مشاهده شده است. ).
برای به دست آوردن درک بهتری از بازده بهبود یافته ای که می توان با استفاده از روش چند وضوح به جای روش تک تفکیک به دست آورد، سرعت های محاسباتی دو روش را برای تعیین سلول ها در منطقه افست از شکل 8 در وضوح 14، 15 مقایسه کردیم. و 16. برای روش چند تفکیک پذیری، از مجموعه سلول های رزولوشن 13 به عنوان وضوح اولیه درشت استفاده کردیم. تست ها با استفاده از زبان برنامه نویسی پایتون بر روی یک دستگاه 64 بیتی ویندوز 10 با CPU Intel Core i5-3570S و 8 گیگابایت رم انجام شد. توجه داشته باشید که بسته منبع باز GeoPy Python (
https://pypi.org/project/geopy/ ) برای محاسبه فاصله ژئودتیکی از محل نقطه تا هسته سلول استفاده شده است. میز 1میانگین سرعت محاسبات را برای هر دو روش نشان می دهد.
بدیهی است که روش چند وضوح به طور قابل توجهی سرعت محاسبات را با افزایش وضوح کاهش می دهد. در وضوح 14، تقریباً 31٪ سلول های کمتری در فضای جستجو وجود دارد و در نتیجه سلول های کمتری باید تحت بررسی پرهزینه فاصله ژئودتیک قرار بگیرند که منجر به کاهش سرعت محاسبات تقریباً 34٪ می شود. همانطور که با کاهش قابل توجه سرعت محاسبات (به ترتیب تقریباً 67٪ و 86٪) در وضوح 15 و 16، مزایای روش چند وضوح واضح تر می شود. این به این دلیل است که فضای جستجوی سلولها از سلولهای حاشیهای مشتق شده است که با وضوح بهتر به مرز ناحیه افست همگرا میشوند (همانطور که در شکل 9 نشان داده شده است.، و بنابراین به طور قابل توجهی کوچکتر از فضای جستجوی سلول ها در روش تک وضوح است (به عنوان مثال، 7020 سلول در مقابل 74886 سلول در وضوح 16). علاوه بر این، تعداد سلولها در فضای جستجو در وضوحهای متوالی تقریباً سه ضریب افزایش مییابد، در مقایسه با ضریب تقریبی نه برای روش وضوح تک. در نتیجه، تعداد تجمعی سلولهایی که باید در روش چند تفکیکپذیری فاصله بررسی شوند، بسیار کمتر از روش تک وضوح است (به عنوان مثال، 9963 سلول در مقابل 74886 سلول در وضوح 16).
5.2. مناطق افست موبایل
به یاد داشته باشید که مدلسازی یک منطقه افست موبایل با وضوح درشت در صورت ورود سلولها منجر به اختلاف میشود سیک+1بر اساس تغییر بین تعیین می شوند جک+1و جک. به منظور درک بهتر این اختلافات و دقت بهبود یافته ای که می توان با استفاده از روش پیشنهادی استفاده از سلول ها در سیک+1متربا روش تراز برای تعیین سلول ها در سیک+1، ما سلول ها را در یک منطقه افست 30 متری در اطراف مجموعه ای از 304 نقطه با استفاده از هر دو روش در وضوح 12 محاسبه کردیم ( ~17m عرض سلول بیضی) و 13 ( ~6m عرض سلول بیضی) و نتایج را با مجموعه واقعی سلول ها مقایسه کرد تیبا استفاده از روش آفست استاتیک از بخش 3 تعیین می شود . هر نقطه نشان دهنده مکان اتوبوس (که به عنوان یک دستگاه اینترنت اشیا در نظر گرفته می شود) در یک سفر تقریباً 30 دقیقه ای را نشان می دهد. این دادهها از فیدهای مکان واقعی خودرو (AVL) استخراج شده است که هر 5 ثانیه از اتوبوسهای شبکه حملونقل کودیاک در Greater Moncton، نیوبرانزویک، کانادا گرفته میشود. در هر نقطه پک، خطای بین مجموعه سلول ها سیکو مجموعه واقعی سلول ها تیکبا استفاده از رابطه (1) که تعداد سلول هایی را که بین دو مجموعه متفاوت است، محاسبه شد. برای تعیین میانگین خطای سلولی و انحراف استاندارد، این مقادیر بر روی تعداد نقاط میانگین گیری شدند. جدول 2 آمار خطا را هنگام ورود سلول ها نشان می دهد سیکمتمرکز هستند جکو جدول 3 آمار خطا را با استفاده از روش پیشنهادی نشان می دهد.
همانطور که در جدول 2 نشان داده شده است ، در صورت وجود سلول ها، اختلافات واضحی وجود دارد سیکمتمرکز هستند جکدر قطعنامه های درشت مثلا خیر سیکدر وضوح 12 دقیقاً با مجموعه واقعی سلول ها مطابقت داشت تیک(یعنی 100٪ از جبران نادرست بود) و میانگین خطای سلول برای هر کدام سیکسه سلول بود یک الگوی مشابه در وضوح 13 رخ داد، که در آن 99.7٪ از انحرافات نادرست بود و میانگین خطای سلول هشت سلول بود. با این حال، این اختلافات را می توان با استفاده از روش پیشنهادی همانطور که در جدول 3 نشان داده شده است کاهش داد . در وضوح 12، تنها 49.7٪ و 17.4٪ از افست ها نادرست بودند و میانگین خطای سلول برای هر سیکهنگامی که مقدار به 0.7 سلول و 0.2 سلول کاهش یافت متربه ترتیب برابر با 13 و 14 بود. در وضوح 13، 94.4٪ و 39.1٪ از افست ها نادرست بود و میانگین خطای سلول برای هر سیکبه 3 سلول و 0.6 سلول کاهش یافت که مقدار متربه ترتیب برابر با 14 و 15 بود.
به طور کلی، مشهود است که میانگین خطای سلولی برای هر کدام سیککاهش می یابد به عنوان مترافزایش. علاوه بر این، در هر دو وضوح 12 و 13، میانگین خطای سلول در حال حاضر کمتر از 10٪ از مقدار مربوطه در جدول 2 است . متر=من+2. این به این دلیل است که هر سلول با وضوح های متوالی به 9 سلول فرزند تقسیم می شود که به طور قابل توجهی خطای کوانتیزاسیون را کاهش می دهد. مترافزایش می یابد (برای دیافراگم های کمتر از 9، انتظار داریم میانگین خطای سلولی به تدریج کاهش یابد). علاوه بر این، تعداد مواردی که در آن سیکدقیقا مطابقت دارد تیک(یعنی خطای سلول برابر با صفر بود) افزایش یافت مترافزایش یافته است، همانطور که با کاهش درصد جبران نادرست نشان داده شده است. با این حال، ما توجه می کنیم که درصدها در وضوح 13 به احتمال زیاد بیشتر است زیرا سلول های بیشتری در آن وجود دارد سیک(تقریباً 85 در وضوح 13 در مقابل 11 در وضوح 12) که باعث می شود به تطابق دقیق با سلول های موجود در تیکسخت تر. در یک نکته دیگر، ذکر این نکته ضروری است که افزایش ارزش متربه طور قابل توجهی تعداد سلول ها را افزایش می دهد سیکمترکه باید دستکاری شود تا سلول های موجود در آن مشخص شود سیکبا وضوح درشت تر من(همانطور که با تعداد سلول های موجود در افست در وضوح نشان داده شده است متر). بنابراین، برای کاهش هزینه محاسباتی مرتبط با افزایش متر، یک جهت ارزشمند برای کار آینده، نمایندگی خواهد بود سیکمتربه عنوان مجموعه ای از سلول ها با وضوح چندگانه مک(که حاوی سلول های بسیار کمتری است) و روش های تعیین سلول های موجود را بررسی کنید مک+1بر اساس مقادیر ترجمه بین جک+1مترو جکمتر.
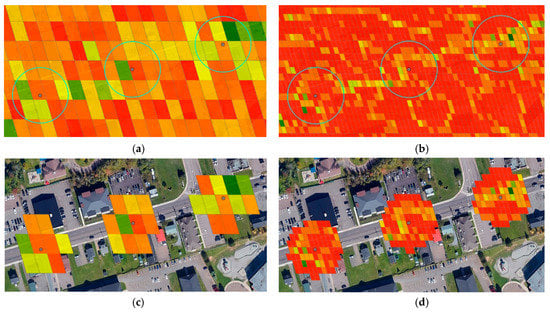
در نهایت، شکل 10 نشان میدهد که چگونه میتوانیم روش پیشنهادی را برای مدلسازی مناطق افست موبایل در وضوحهای درشت اعمال کنیم. شکل 10 a,b سه نقطه متوالی از یک دستگاه IoT سیار (به عنوان مثال، وسیله نقلیه یا تلفن هوشمند) را نشان می دهد که توسط یک منطقه افست 30 متری و سلول هایی با وضوح 12 احاطه شده است. ~17m عرض سلول بیضی) و 13 ( ~6m پهنای سلول بیضی شکل) به ترتیب، که برای شبیه سازی مقادیر به دست آمده از جمع آوری حجم عظیمی از داده های نقطه ای (مثلاً سطح نویز، آلودگی هوا، یا داده های اشتراک سواری) رنگی می شوند. با اعمال روش پیشنهادی با متر=من+2، همانطور که در شکل 10 c,d نشان داده شده است (تجسم شده در Google Earth) می توانیم سلول هایی را که هر نقطه را احاطه کرده اند تعیین و تجسم کنیم .
6. نتیجه گیری
با حجم عظیمی از دادههای نقطهای مبتنی بر مکان که توسط دستگاههای IoT تولید میشود و متعاقباً افزایش علاقه جامعه Digital Earth، نیاز به عملیات فضایی سازگار با Digital Earth و چارچوب DGGS زیرین پدید آمده است. برای این منظور، ما روشهایی برای مدلسازی یک منطقه افست در اطراف مکان نقطه یک دستگاه اینترنت اشیا (هم ثابت و هم متحرک) که به سلول یک DGGS کوانتیزه میشود، ارائه کردهایم. قابل توجه، این روشها نشان میدهند که چگونه میتوان از ساختار نمایهسازی زیربنایی یک DGGS برای تعیین سلولها در یک منطقه افست در وضوحهای فضایی مختلف استفاده کرد. به طور خاص، روش های پیشنهادی از همخوانی سلولی، هم ترازی هسته های سلولی، دستکاری شناسه سلولی، و عملیات روی شناسه های سلولی را برای تعیین مجاورت سلول و روابط توپولوژیکی در حمایت از مدل سازی مناطق آفست استاتیک و متحرک تنظیم کنید. روشهای پیشنهادی برای ارائه نتایج گویا، برای نشان دادن دستاوردهای سرعت محاسباتی یک رویکرد چند تفکیکپذیری برای مدلسازی مناطق آفست استاتیک در وضوحهای خوب اجرا شدهاند، و برای نشان دادن اینکه چگونه سلولهای یک منطقه افست متحرک را میتوان در وضوحهای درشت تعیین و تجسم کرد، اعمال شد.
با توجه به مدلسازی مناطق آفست استاتیک، کار تحقیقاتی بیشتری برای توسعه رویکردهای چند وضوح کارآمد برای DGGSهای شش ضلعی که بر مسئله سلسلهمراتب ناسازگار غلبه میکنند، مورد نیاز است. در کنار DGGS های شش ضلعی با دیافراگم خالص، کار آینده باید DGGS های شش ضلعی با دیافراگم مختلط را نیز در نظر بگیرد [ 24 ] زیرا آنها یک رویکرد امیدوارکننده هستند که محدود به داشتن دیافراگم یکسان در هر وضوحی نیستند که کنترل بیشتری بر ناحیه سلول در هر وضوح ارائه می دهد و بنابراین، انعطاف پذیری بیشتر در مدل سازی مناطق افست.
از نظر مدلسازی مناطق افست در اطراف مکانهای دستگاه اینترنت اشیا موبایل، گام بعدی ما بررسی رویکردهای چند وضوحی است که به موجب آن یک منطقه افست تلفن همراه بهعنوان مجموعهای از سلولها با وضوح چندگانه نشان داده میشود نه یک مجموعه با وضوح منفرد از سلولها. علاوه بر این، ما قصد داریم پتانسیل استفاده از سلولهای منطقه افست را برای نشان دادن یک محله تحرک در اطراف مکانهای یک دستگاه اینترنت اشیای سیار بررسی کنیم تا وظیفه مهم زمینهسازی دادههای اینترنت اشیا را تسهیل کنیم. از آنجایی که سلولهای DGGS برای ادغام دادههای بزرگ مکانی در وضوحهای مکانی مختلف مناسب هستند، ما پیشبینی میکنیم که چنین رویکردی میتواند سودمند باشد.







بدون دیدگاه