

خلاصه
کلید واژه ها:
جغرافیای زمانی ; فضای مانع ؛ آنالیز بصری توپوگرافی خط دید ; نمایندگی های موبایل ; احتمال برخورد
1. معرفی
2. پس زمینه
2.1. برخورد در جغرافیای زمان احتمالی
احتمالات موقعیت مبنایی را برای محاسبه احتمال ملاقات دو جسم متحرک فراهم می کند و احتمال حاصل می تواند به سؤالات زیر پاسخ دهد [ 15 ]. احتمال برخورد دو جسم متحرک چقدر است؟ احتمال ملاقات آنها در کجا بیشتر است؟ برای هر جفت جسم متحرک A و B، احتمال برخورد در فضای گسسته [ 15 ، 26 ] را می توان به صورت زیر بیان کرد:
جایی که پآ(من)و پب(من)احتمال توزیع A و B در سلولی با شاخص i است . با این حال، این الگوریتم به تعاریف سلول حساس است [ 17 ، 26 ]. این بدان معنی است که دانه بندی متفاوت در یک فضای پیوسته یکسان، احتمال برخورد متفاوتی را به همراه خواهد داشت. یین و همکاران [ 15 ] آستانه فاصله ادراک را معرفی کرد و مدلی از احتمال برخورد را بر اساس این آستانه پیشنهاد کرد. مناطق برخورد نامنظم به طور نامحدود به شبکه های منظم تقسیم می شوند و سپس توسط انتگرال ها محاسبه می شوند. با این حال، این الگوریتم تأثیر موانع بر ادراک بصری را در نظر نمی گیرد.
2.2. آنالیز بصری توپوگرافی خط دید
3. مدل احتمال برخورد بر اساس فضای مانع
3.1. معناشناسی برخورد در فضای مانع
- (1)
-
فاصله شامل فاصله مسیر و فاصله خط مستقیم اقلیدسی است. تعیین آستانه فاصله ارتباط نزدیکی با نوع و ویژگی های فرد دارد. در اکولوژی حرکت، آستانه فاصله برای برخوردهای بالقوه با گونه ها متفاوت است. به عنوان مثال، آستانه فاصله برای جمعیت گوزن و شیر به ترتیب 50 متر [ 34 ] و 200 متر [ 35 ] است.
- (2)
-
ویژگی های بدون مانع نسبت به محل قرارگیری این دو فرد است. در شرایط عادی، ویژگی های مانع ویژگی های فضایی با نوع ادراک حسی مرتبط است. به عنوان مثال، حصار دو متری مانعی برای حس بینایی است، اما نه لزوما برای حس شنوایی. در GIScience، تجزیه و تحلیل بصری خط دید می تواند به صورت پویا دید بین دو نقطه را تشخیص دهد، بنابراین می تواند تشخیص دهد که آیا مانعی وجود دارد که دو دیدگاه را مسدود می کند یا خیر. تحلیل دید سنتی عمدتاً محیط زمین را در نظر می گیرد، در حالی که عوامل فردی مانند قد فرد و ویژگی های ادراک فرد را نادیده می گیرد. این همچنین به ما یادآوری می کند که تجزیه و تحلیل بصری برای اقدامات احتمالی برخورد باید عوامل فردی را در نظر بگیرد.
3.2. برخورد با رویدادها در فضای مانع
3.2.1. شرایط رویدادهای برخورد
3.2.2. ایجاد رویدادی که افراد در یک زمان خاص در مکان های خاص بودند
در جغرافیای زمانی، هر مکانی که یک عامل در آن قرار دارد معمولاً می تواند به یک نقطه هندسی انتزاع شود [ 9 ]. بنابراین، موقعیت فرد A را می توان به عنوان یک نقطه در نظر گرفت و می تواند به عنوان L A = { l A | l A [1]، l A [2]، …}. در فضای سه بعدی (3D)، هر موقعیت l A مقداری از متغیر L A است . به طور مشابه، موقعیت فردی B را می توان به عنوان L B = { l B | برچسب زد l B [1]، l B[2]، …}. در محیط جغرافیایی و زمان t داده شده ، رویدادهای برخورد دو فرد A و B به ترتیب در موقعیت های خاص l A و l B را می توان به صورت زیر توصیف کرد:
جایی که:
از موارد فوق می توان دریافت که یک رویداد مواجهه می تواند زمانی رخ دهد که دو شرط با یکدیگر مواجه شوند ( |||لآ-لب||| ≤ دمترههتیو لآ”لب”¯∩f(ایکس،y)=ϕ) راضی هستند. بدیهی است که وقوع رویداد Eمترههتی(لآ،لب| اچآ، اچب; تی)به این معنی است که در زمان t ، فرد A باید در موقعیت l A قرار گیرد (به عنوان رویداد نشان داده می شود Eتیلآ، و B باید در l B قرار گیرد (به عنوان نشان داده شده است Eتیلب). بنابراین، رویداد Eمترههتی(لآ،لب| اچآ، اچب; تی)را نیز می توان اینگونه توصیف کرد:
جایی که وقایع Eتیلآو Eتیلبمستقل هستند، که به دلیل این فرض است که حرکات A و B مستقل از یکدیگر هستند. علاوه بر این، از آنجایی که یک فرد فقط می تواند در یکی از تعدادی مکان در یک منطقه موقعیت مکانی بالقوه [ 26 ] واقع شود، این رویداد Eتیلآ[1]از فرد A واقع در l A [1] و رویداد Eتیلآ[2]در l A [2] متقابل هستند. علاوه بر این، یک جفت از افراد، A و B، فقط می توانند در یکی از چندین جفت موقعیت قرار گیرند (به عنوان مثال، ( l A [1]، l B [1])، ( l A [1]، l B [ 2])، …) در همان زمان، و بنابراین رویداد Eمترههتی(لآ[1]،لب[2])| اچآ، اچب; تی)در جفت موقعیت ( l A [1]، l B [1]) و Eمترههتی(لآ[1]،لب[2]،| اچآ، اچب; تی)در ( l A [1]، l B [2]) متقابل هستند.
3.2.3. ایجاد رویدادی که افراد در یک زمان خاص با هم بودند
فضای نمونه رویداد Eتیلآناحیه موقعیت مکانی بالقوه فرد A در زمان t است که می توان آن را به صورت نشان داد Ωتیآ. این را می توان به صورت زیر نوشت: Ωتیآ= ∪Eتیلآ= { l A [1]، l A [2]، …}. به طور مشابه، فضای نمونه رویداد Eتیلبرا می توان به عنوان نشان داد Ωتیب= ∪Eتیلب= { l B [1]، l B [2]، …}. یک بار دو فاصله نمونه Ωتیآو Ωتیبمتعلق به رویداد هستند Eمترههتی(Lآ، Lب| اچآ، اچب; تی)دیدار دو فرد A و B در زمان t را می توان به صورت زیر محاسبه کرد:
جایی که فضای نمونه رویداد که ترکیبی از رویدادها است Eتیلآو Eتیلبرا می توان با عملیات محصول دکارتی به صورت زیر بدست آورد: Ωتیآ،ب=Ωتیآ×Ωتیب={〈لآ،لب;تی〉| لآ∈Ωتیآ،لب∈Ωتیب}. معادله (4) یک فضای شش بعدی (6D) است، یعنی حاصل ضرب دکارتی دو متغیر سه بعدی l A و l B : l A ( x , y , z ) × l B ( x , y , z . ). زمان t یک ثابت است نه یک متغیر، بنابراین به عنوان یک بعد دیده نمی شود. اگرچه l A و l B متغیرهایی در فضای سه بعدی هستند، l A و l Bواحدهایی در سطح بر اساس ساختار گسسته هستند و برچسب هر سلول به جای دو تاپل (ردیف، ستون) یک تاپل است، مانند l A [1] و l A [2]. به این ترتیب، l A و l B را می توان با یک آرایه یک بعدی شناسایی کرد، و بنابراین می توان با یک نماد عملیاتی از اتحاد عبور کرد.
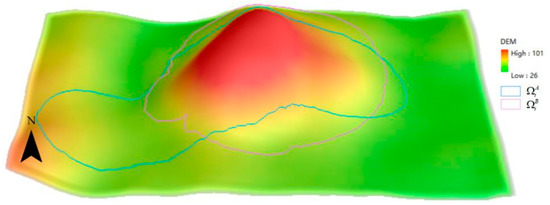
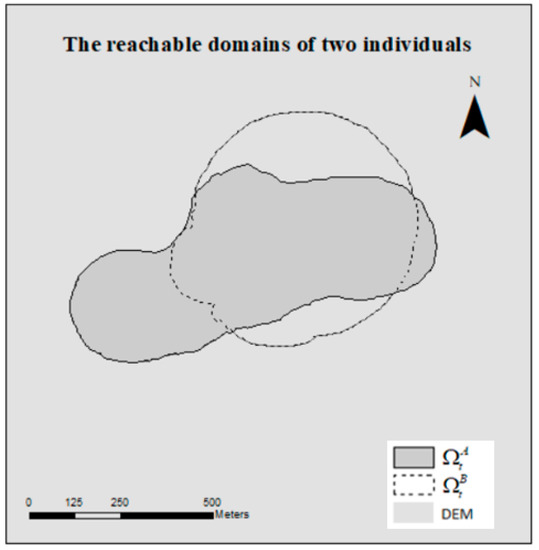
از آنجا که Ωتیآ،بیک فضای 6 بعدی است، ارائه آن در یک فضای سه بعدی نیاز به روش کاهش ابعاد دارد. فرض کنید ارتفاع دو فرد A و B هر دو یک متر است، حوزه های قابل دسترسی آنها Ωتیآو Ωتیبیکسان هستند و با ماتریس DEM زیر قابل توصیف هستند:
3.2.4. ایجاد رویدادی که یک فرد در یک مکان خاص با دیگری روبرو می شود
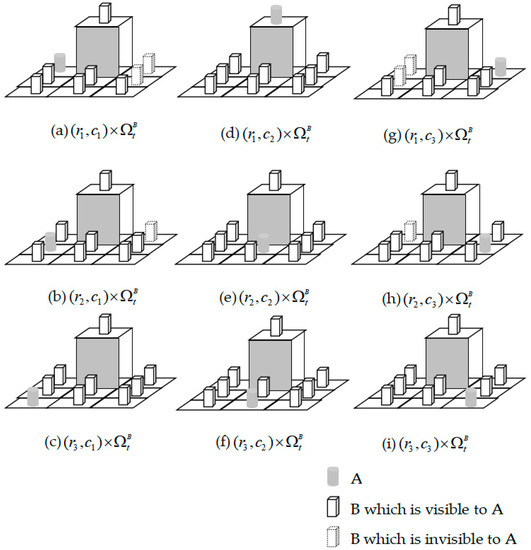
همچنین می توان رویدادی را ساخت که یک فرد A در یک مکان خاص l A با فرد دیگری B در زمان t ملاقات کرد که به صورت نشان داده می شود. Eمترههتی(لآ، Lب| اچآ، اچب; تی). در این رویداد، موقعیت فرد A ثابت است، در حالی که موقعیت B متغیر و نامشخص است، که یک یا چند مکان در ناحیه قابل دسترسی B است. در شکل 4 a، فرد A (سیلندر) در یک نقطه موقعیت (r1،ج1)به احتمال زیاد در 7 موقعیت با B (سیلندر جامد) روبرو می شود و به دلیل وجود موانع ملاقات با B (سیلندر شکسته) در 2 موقعیت غیرممکن است. این رویداد می تواند برای هر مکان به صورت زیر ساخته شود:
بر این اساس، می توانیم رویدادی را بسازیم که فرد A در مکان l A با B ملاقات کرد که به صورت نشان داده می شود. Eمترههتی(لآ، Lب| اچآ، اچب)حداقل یک بار در طول مدت ردیابی. این رویداد می تواند برای هر مکان به صورت زیر ساخته شود:
که در آن رویداد مواجهه با استفاده از رابطه (5) مدل شده است. با این حال، این یک غیر انحصاری متقابل است، زیرا اشیاء می توانند چندین بار تعامل داشته باشند [ 26 ].
3.2.5. ایجاد رویدادی که افراد در طول مدت پیگیری با آن مواجه شدند
رویدادهایی که دو نفر در هر زمان t در هر جفت مکانی ملاقات کردند ( l A , l B ) به سادگی به عنوان Eمترههتی(Lآ، Lب| اچآ، اچب)، همچنین می تواند از معادله (4) استخراج شود، که رویدادی را که افراد در هر مرحله زمانی ملاقات کردند، مدل می کند.
که در آن وقایع در مقاطع مختلف زمانی مانند Eمترههتی(Lآ، Lب| اچآ، اچب; تی1)و Eمترههتی(Lآ، Lب| اچآ، اچب; تی2)، متقابلاً منحصر به فرد نیستند، یعنی رویدادهای مواجهه می توانند چندین بار در مقاطع مختلف زمانی رخ دهند.
3.3. احتمال برخورد در فضای مانع
3.3.1. محاسبه احتمال اینکه افراد در یک زمان خاص در مکان های خاص قرار داشته باشند
با توجه به معادله (2) عدم قطعیت رویداد مواجهه Eمترههتی(لآ، لب| اچآ، اچب; تی)را می توان به دو رویداد همزمان تبدیل کرد Eتیلآو Eتیلب. این بدان معنی است که l A و l B را می توان به عنوان دو متغیر تصادفی این رویداد برخورد در نظر گرفت. برای یک جفت از افراد A و B که مستقل از یکدیگر حرکت می کنند، احتمال Eمترههتی(لآ، لب| اچآ، اچب; تی)را می توان به عنوان نشان داد پمترههتی(لآ، لب| اچآ، اچب; تی)، و با توجه به فرمول ضرب رویدادهای مستقل در نظریه احتمال قابل محاسبه است. این را می توان به صورت زیر نوشت:
جایی که پ(Eتیلآ)احتمال فرد A را در موقعیت l A در زمان t ثبت می کند و پ(Eتیلب)احتمال B را در موقعیت l B در زمان t ثبت می کند . را پمترههتی(لآ، لب |اچآ، اچب; تی)را می توان برای همه موقعیت های یک نقشه در هر زمان محاسبه کرد و احتمال مشترک آن است پ(Eتیلآ)و پ(Eتیلب). فلوچارت برای محاسبه گام به گام احتمال در شکل 5 نشان داده شده است .
3.3.2. محاسبه احتمال اینکه افراد در یک زمان خاص با هم بودند
از آنجایی که رویدادهای رویارویی در جفت مکانهای مختلف برای دو فرد متقابلاً منحصر به فرد هستند (یعنی دو فرد فقط میتوانند در یک جفت مکان در یک نقطه از زمان قرار گیرند)، این احتمال وجود دارد که دو فرد در زمان خاص t در هر جفت مکانی تعامل داشته باشند ( L A و L B ) را می توان به سادگی با جمع کردن احتمالات تعامل برای همه جفت های مکان در داخل محاسبه کرد. Ωتیآ،ب، و می تواند به صورت زیر بیان شود:
که در آن فرمول احتمال را می توان به عنوان انتگرال معادله (8) در مساحت در نظر گرفت Ωتیآ،ب; هر دو l A و l B نقاط فضایی سه بعدی هستند، بنابراین انتگرال مربوطه سه گانه است. یک نوع گسسته از معادله (9) در بخش 4.3 مشتق شده است . همانطور که قبلاً بحث شد، روش پیشنهادی در این مقاله بر این فرض استوار است که تک تک حرکات مستقل از یکدیگر هستند. در واقع، وقوع رویدادهای رویارویی بر استقلال حرکات واقعی فردی تأثیر میگذارد، اما بر فرض صحیح بودن فرضیه صفر (یعنی حرکت فردی مستقل از یکدیگر) تأثیری نمیگذارد، زیرا خود فرضیه صفر است. فرضیه مورد آزمایش [ 17 ]. سپس این محاسبه معادله (9) را می توان برای هر برش t تکرار کردبرای تعیین چگونگی نوسان احتمالات تعامل در طول زمان [ 26 ]، و همچنین ارزیابی استقلال بین حرکات فردی و تأثیر رویدادهای رویارویی بر استقلال حرکات بعدی.
3.3.3. محاسبه احتمال ملاقات یک فرد در یک مکان خاص با دیگری
با توجه به معادله (5) احتمال وقوع Eمترههتی(لآ، Lب| اچآ، اچب; تی)، که به عنوان نشان داده می شود پمترههتی(لآ، Lب| اچآ، اچب; تی)، یک احتمال لبه از معادله (8) است، که در آن A در یک مکان شناخته شده است، و B در تمام مکان های ممکن نزدیک به طور همزمان است. می توان آن را با قانون جمع رویداد انحصاری متقابل به صورت زیر محاسبه کرد:
بر اساس احتمال فوق و معادله (6) می توان احتمال وقوع را نیز محاسبه کرد. Eمترههتی(لآ، Lب| اچآ، اچب)، که به عنوان نشان داده می شود پمترههتی(لآ، Lب| اچآ، اچب). این احتمال را می توان به صورت زیر نوشت و محاسبه کرد:
3.3.4. محاسبه احتمالی که افراد در طول مدت ردیابی با آن مواجه می شوند
با توجه به رابطه (7)، احتمال اینکه دو فرد در هر زمان با t در هر جفت مکانی ( l A , l B ) مواجه شوند را می توان به صورت نشان داد. پمترههتی(Lآ، Lب| اچآ، اچب)، و می تواند با فرمول احتمال جمع رویدادهای غیر متقابل محاسبه شود. این را می توان به صورت زیر نوشت:
جایی که پمترههتی(Lآ، Lب| اچآ، اچب)یک عدد واحد است که نشان دهنده احتمالی است که A و B حداقل یک بار در کل فاصله ردیابی با یکدیگر مواجه شده اند.
4. کاربرد
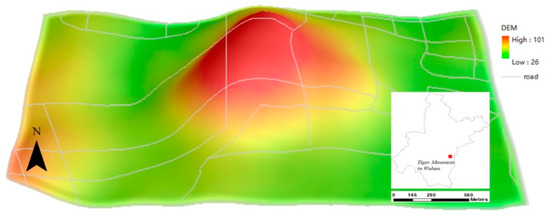
4.1. مدلسازی DEM فضای پیوسته
4.2. محاسبه احتمال موقعیت
جغرافیای زمانی احتمالی [ 13 ، 14 ] ابزاری برای تخصیص احتمالات به مکان های بالقوه یک فرد فراهم می کند. توزیع احتمال یک α فردی در منطقه موقعیت بالقوه Ωتیαطبق داونز و همکاران، همچنین میتوان با استفاده از معادله زیر با یک تابع وزندهی معکوس فاصله بدست آورد. [ 16 ]:
جایی که پ(Eتیلα[ک])احتمال این است که α در سلول l α [ k ] در زمان t قرار گرفته باشد ، s α معمولاً محل مورد انتظار α فرد در t است ، و 1|||سα-لα[ک]|||متقابل فاصله بین دو نقطه s α و l α [ k ] در فضای سه بعدی است.
4.3. روش محاسبه احتمال برخورد
معادله (9) احتمال برخورد دو فرد در زمان t است و نوع گسسته آن را می توان به صورت زیر نوشت:
که در آن احتمال مبنایی را برای معادله (12) برای محاسبه احتمال برخورد در فضای گسسته و در طول زمان فراهم می کند. از آنجایی که l A و l B با یک تاپل یک بعدی نشان داده می شوند، دو عملگر جمع می توانند به ترتیب آرایه یک بعدی l A و l B را طی کنند . بدیهی است که معادله (14) نیز شکل جمع احتمال مشترک است.
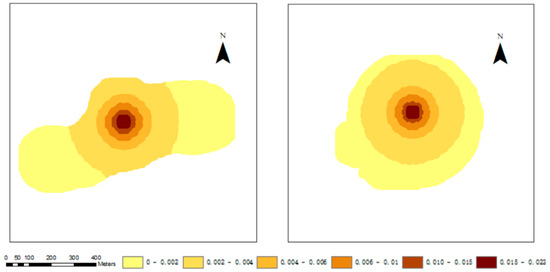
علاوه بر این، معادله (10) احتمال این است که یک فرد در یک موقعیت معین بتواند فرد دیگری را در زمان t ملاقات کند و نوع گسسته آن را می توان به صورت زیر نوشت:
که در آن احتمال مبنای محاسبه معادله (11) در فضای گسسته را فراهم می کند. علاوه بر این، برای محاسبه احتمال رویارویی، باید این پارامترها را نیز تنظیم کنیم: ① حرکت دو فرد A و B مستقل است، ② ارتفاع H A و H B یک متر و دو متر است، و ③ d ملاقات می کند . = 80 متر
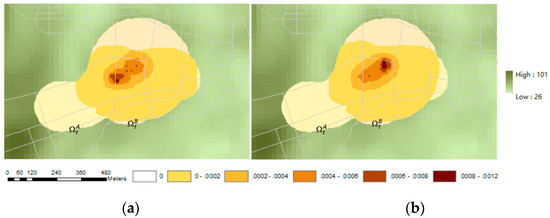
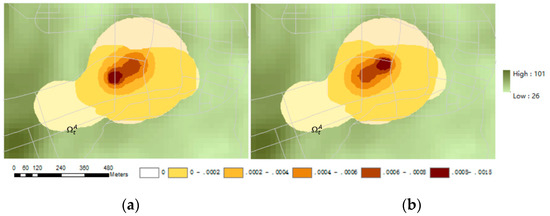
5. نتایج
6. بحث
7. نتیجه گیری
منابع
- آن، ال. Tsou، MH; اسپیتزبرگ، BH; گوپتا، DK; مدلهای مسیر نهفته Gawron، JM برای تحلیل فضا-زمان: کاربرد در رمزگشایی دادههای پانل فضایی. Geogr. مقعدی 2016 ، 48 ، 314-336. [ Google Scholar ] [ CrossRef ]
- ژانگ، پی. Beernaerts, J. A Hybrid Approach Combining the Multi-Temporal Scale Spatio-Temporal Network با مدل مثلثی پیوسته برای بررسی تعاملات پویا در داده های حرکت: مطالعه موردی فوتبال. بین المللی J. Geo-Inf. 2018 ، 7 ، 31. [ Google Scholar ] [ CrossRef ]
- لانگ، ج.ا. وب، اس ال. نلسون، TA; Gee، KL نقشه برداری مناطق همپوشانی مکانی-زمانی از داده های ردیابی حیات وحش. حرکت Ecol. 2015 ، 3 ، 38. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کویجپرز، بی. عثمان، دبلیو. مدلسازی عدم قطعیت اجسام متحرک در شبکههای جادهای از طریق منشورهای فضا-زمان. بین المللی جی. جئوگر. Inf. علمی 2009 ، 23 ، 1095-1117. [ Google Scholar ] [ CrossRef ]
- Long Jed، A. کمی کردن تعاملات مکانی-زمانی از دادههای ردیابی حیات وحش: مسائل مکان، زمان و اهمیت آماری. Procedia Environ. علمی 2015 ، 26 ، 3-10. [ Google Scholar ] [ CrossRef ]
- طولانی، JA به سوی یک جغرافیای زمانی احتمالی مبتنی بر جنبشی. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 855-874. [ Google Scholar ] [ CrossRef ]
- میلر، HJ نظریه اندازه گیری برای جغرافیای زمانی. Geogr. مقعدی 2015 ، 37 ، 17-45. [ Google Scholar ] [ CrossRef ]
- میلر، اچ جی; بریدول، اس. یک نظریه میدانی برای جغرافیای زمانی. ان دانشیار صبح. Geogr. 2009 ، 99 ، 49-75. [ Google Scholar ] [ CrossRef ]
- Downs، JA تخمین چگالی زمانی-جغرافیایی برای اجسام نقطه متحرک. در علم اطلاعات جغرافیایی. GIScience 2010. نکات سخنرانی در علوم کامپیوتر ; Fabrikant, SI, Reichenbacher, T., van Kreveld, M., Schlieder, C., Eds. Springer: برلین/هایدلبرگ، آلمان، 2010; جلد 6292، ص 16-26. [ Google Scholar ] [ CrossRef ]
- کاتاجیستو، جی. Moilanen، A. روش محدوده خانگی مبتنی بر هسته برای دادهها با فواصل نمونهبرداری نامنظم. Ecol. مدل. 2006 ، 194 ، 405-413. [ Google Scholar ] [ CrossRef ]
- داونز، جی. هورنر، ام. Lamb، D. آزمایش تخمین چگالی زمانی-جغرافیایی برای تجزیه و تحلیل محدوده خانه با استفاده از یک مدل مبتنی بر عامل حرکت حیوانات. بین المللی جی. جئوگر. Inf. علمی 2018 ، 32 ، 1505-1522. [ Google Scholar ] [ CrossRef ]
- زمستان، S. به سوی یک جغرافیای زمانی احتمالی. در ACM SIGSPATIAL GIS 2009 ; Mokbel, M., Scheuermann, P., Aref, WG, Eds. ACM Press: نیویورک، نیویورک، ایالات متحده آمریکا، 2009. [ Google Scholar ] [ CrossRef ]
- زمستان، اس. یین، ZC هدایت حرکات در جغرافیای زمانی احتمالی. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 1349-1365. [ Google Scholar ] [ CrossRef ]
- آهنگ، ی. Miller, HJ شبیه سازی توزیع احتمال بازدید در منشورهای فضا-زمان مسطح. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 104-125. [ Google Scholar ] [ CrossRef ]
- زمستان، اس. یین، ZC عناصر جغرافیای زمانی احتمالی. GeoInformatica 2011 ، 15 ، 417-434. [ Google Scholar ] [ CrossRef ]
- داونز، جی. هورنر، مگاوات؛ هایزر، جی. بره، دی. منشورهای فضا-زمان احتمالی مبتنی بر Loraamm، R. Voxel برای تجزیه و تحلیل حرکات حیوانات و استفاده از زیستگاه. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 875-890. [ Google Scholar ] [ CrossRef ]
- یین، ZC؛ وو، ی. زمستان، اس. هو، LF; برخوردهای تصادفی هوانگ، جی جی در جغرافیای زمانی احتمالی. بین المللی جی. جئوگر. Inf. علمی 2018 ، 32 ، 1026-1042. [ Google Scholar ] [ CrossRef ]
- چن، توسط; لی، کیو. وانگ، دی. شاو، اس ال. لام، WH; یوان، اچ. Fang, Z. منشورهای فضا-زمان قابل اعتماد تحت عدم قطعیت زمان سفر. ان دانشیار صبح. Geogr. 2013 ، 103 ، 1502-1521. [ Google Scholar ] [ CrossRef ]
- دلافونتین، ام. نویتنز، تی. Van de Weghe، N. مدلسازی حرکت بالقوه در محیطهای سفر محدود با استفاده از منشورهای فضا-زمان خشن. بین المللی جی. جئوگر. Inf. علمی 2011 ، 25 ، 1389-1411. [ Google Scholar ] [ CrossRef ]
- کنزاک، ام. مک کتریک، تی. اوفلدرز، تی. بوچین، م. جوجیولی، ال. لانگ، جی. نلسون، تی. Westenberg، MA; Buchin، K. تجزیه و تحلیل بصری تأخیرها و تعامل در داده های حرکت. بین المللی جی. جئوگر. Inf. علمی 2017 ، 31 ، 320-345. [ Google Scholar ] [ CrossRef ]
- Hägerstraand, T. در مورد افراد در علم منطقه چطور؟ پاپ Reg. علمی 1970 ، 24 ، 7-24. [ Google Scholar ] [ CrossRef ]
- سونیر، ن. Sayed, T. تجزیه و تحلیل خودکار در مقیاس بزرگ تعاملات و برخوردهای خودرو. ترانسپ Res. ضبط J. Transp. Res. هیئت 2010 ، 2147 ، 42-50. [ Google Scholar ] [ CrossRef ]
- Loraamm, RW; Downs Joni, A. یک رویکرد حرکت حیات وحش برای مکان یابی بهینه سازه های عبور حیات وحش. بین المللی جی. جئوگر. Inf. علمی 2016 ، 30 ، 74-88. [ Google Scholar ] [ CrossRef ]
- هوانگ، دبلیو. لی، اس. لیو، ایکس. پیش بینی تحرک انسان با تغییرات فعالیت. بین المللی جی. جئوگر. Inf. علمی 2015 ، 29 ، 1569-1587. [ Google Scholar ] [ CrossRef ]
- طولانی، JA یک جغرافیای زمانی مبتنی بر میدان برای تجزیه و تحلیل حرکت حیات وحش. در کنفرانس بین المللی GIScience خلاصه مقاله، مجموعه مقالات نهمین کنفرانس بین المللی علوم اطلاعات جغرافیایی، مونترال، QC، کانادا، 27–30 سپتامبر 2016 ; Springer: برلین/هایدلبرگ، آلمان، 2016; جلد 1. [ Google Scholar ] [ CrossRef ]
- داونز، جی. بره، دی. هایزر، جی. لورام، آر. اسمیت، ZJ; O’Neal، BM کمی کردن تعاملات مکانی-زمانی حیوانات با استفاده از منشورهای احتمالی فضا-زمان. Appl. Geogr. 2014 ، 55 ، 1-8. [ Google Scholar ] [ CrossRef ]
- ناتسفورد، دی. رایتسما، اف. پیرسون، آل. کینگهام، اس. شخصی سازی دیدگاه: تحلیل دید از دیدگاه انسانی. Appl. Geogr. 2015 ، 62 ، 1-7. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، سی. ژانگ، ال. ما، جی. کانگ، ز. لیو، ال. Xue, X. برچسبگذاری چند وضوح تطبیقی در مناظر مجازی. بین المللی جی. جئوگر. Inf. علمی 2010 ، 24 ، 949-964. [ Google Scholar ] [ CrossRef ]
- لیو، ال. ژانگ، ال. ما، جی. ژانگ، ال. ژانگ، ایکس. شیائو، ز. یانگ، ال. یک روش بهبود یافته خط دید برای تجزیه و تحلیل دید در مناظر پیچیده سه بعدی. علمی چین Inf. علمی 2010 ، 53 ، 2185-2194. [ Google Scholar ] [ CrossRef ]
- بارتی، پی. Kumler, MP Route Ahead Visibility Mapping: روشی برای مدلسازی اینکه یک راننده چقدر جلوتر می تواند مسیر تعیین شده را مشاهده کند. J. Maps 2010 ، 6 ، 84-95. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Wang, PKC برنامه ریزی حرکتی بهینه برای ناظران سیار بر اساس حداکثر دید. دین ادامه گسسته. تکانه ها. سیستم سر. B Appl. الگوریتمها 2014 ، 11 ، 313-338. [ Google Scholar ]
- Wang، PKC مسیر و برنامه ریزی حرکتی مبتنی بر دید بهینه ناظران متحرک برای اشیاء سه بعدی. مقعدی غیر خطی کاربرد روشهای تئوری 2009 ، 71 ، e839–e848. [ Google Scholar ] [ CrossRef ]
- فلوریانی، LD; مارزانو، پ. Puppo، E. ارتباط خط دید در مدل های زمین. بین المللی جی. جئوگر. Inf. علمی 1994 ، 8 ، 329-342. [ Google Scholar ] [ CrossRef ]
- لانگ، ج.ا. نلسون، TA; وب، اس ال. Gee, KL یک بررسی انتقادی از شاخصهای تعامل دینامیکی برای مطالعات تلهمتری حیات وحش. J. Anim. Ecol. 2014 ، 83 ، 1216-1233. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بنهامو، اس. والیکس، م. Chamaillé-Jammes، S. مک دونالد، DW; لاوریج، تجزیه و تحلیل مبتنی بر جنبش AJ از تعاملات در شیرهای آفریقایی. انیمیشن. رفتار 2014 ، 90 ، 171-180. [ Google Scholar ] [ CrossRef ]
- مدلسازی طولانی، JA احتمال حرکت در میدانهای فضایی ناهمگن. جی. اسپات. آگاه کردن. علمی 2018 ، 16 ، 85-116. [ Google Scholar ] [ CrossRef ]
- کویجپرز، بی. میلر، اچ جی; نویتنز، تی. عثمان، دبلیو. لنگر عدم قطعیت و منشورهای فضا-زمان در شبکه های جاده ای. بین المللی جی. جئوگر. Inf. علمی 2014 ، 24 ، 1223-1248. [ Google Scholar ] [ CrossRef ]



بدون دیدگاه