

خلاصه
پیچیدگی روزافزون ساختمانهای مدرن، تحرک افراد دارای معلولیت (PWD) را در محیط داخلی به چالش کشیده است. برای کمک به غلبه بر این مشکل، این مقاله یک مدل داده را پیشنهاد میکند که میتواند به راحتی در خدمات اطلاعات فضایی داخلی برای افراد دارای معلولیت اعمال شود. در مدل پیشنهادی، ویژگیها بر اساس مقررات مربوطه تعریف میشوند که عوامل حرکتی قابل توجهی را برای افراد دارای معلولیت تعیین میکنند. برای اعتبارسنجی قابلیت مدل برای توصیف فضاهای داخلی با عباراتی که مربوط به افراد دارای معلولیت حرکتی است، این مدل برای تولید داده ها در یک برنامه برنامه ریزی مسیر، با در نظر گرفتن دو مورد مختلف در یک مرکز خرید استفاده شد. این برنامه تأیید کرد که مسیرهای افراد دارای معلولیت حرکتی به طور قابل توجهی با مسیرهای عابران پیاده معمولی متفاوت است. به گونه ای که ویژگی ها و ویژگی های تعریف شده در مدل داده پیشنهادی را منعکس کند. مورد دوم را می توان به عنوان یک افزونه IndoorGML درج کرد و بنابراین انتظار می رود تولید داده های مربوطه را برای طراحی خدمات مختلف برای افراد دارای معلولیت تسهیل کند.
کلید واژه ها:
افراد دارای معلولیت ؛ ناوبری داخلی ؛ IndoorGML ; مدل داده های داخلی
1. معرفی
همانطور که فعالیت های داخلی به طور فزاینده ای متنوع می شوند، ساختمان های جدید ساخته شده بزرگتر و پیچیده تر شده اند. این پیچیدگی ساختاری مدیریت کارآمد تأسیسات مختلف داخلی را به چالش میکشد و مانع از واکنشهای مؤثر در بلایا میشود. بنابراین، اطلاعات کافی در مورد فضاهای داخلی برای بسیاری از اهداف ضروری است [ 1 ، 2 ] و تغییرات در محیط داخلی باعث افزایش تقاضا برای خدماتی مانند ناوبری داخلی می شود.
تحرک افراد دارای معلولیت (PWD) یک موضوع اجتماعی چالش برانگیز و مهم است. برای PWD، فضاهای داخلی توسط اشیایی مانند دیوارها، درها، و پله ها مسدود می شوند، بر خلاف فضاهای بیرونی، که در آن محدودیت ها بر اساس فواصل جغرافیایی است [ 1 ]. چنین ویژگی هایی از فضاهای داخلی می تواند برای حرکت آزادانه PWD در داخل خانه مشکل زیادی ایجاد کند. بنابراین، خدماتی مانند سیستمهای هدایت داخلی باید با اطلاعات داخلی مخصوص PWD، از جمله موانع، توسعه یابند و این اطلاعات در سیستمهای ناوبری رایج وجود ندارد. با این حال، فناوری های کمکی داخلی برای PWD به طور متناقضی برای استفاده در محیط های داخلی محدود شده است [ 3 ]]. فقدان نمایش مناسب از اطلاعات هندسی و معنایی محیط های داخلی مانع از کاربرد عملی مدل های موجود از این فضاها می شود [ 4 ]. بنابراین، خدمات موثر مرتبط با PWD نیاز به ساخت یک مدل داخلی دارد که شامل اطلاعات کافی در مورد تحرک PWD باشد.
ساخت یک مدل داخلی مناسب برای PWD نیاز به یک مدل داده استاندارد دارد. مدلهای داده استاندارد شده برای برنامههایی با اهداف خاص مانند سیستمهای هدایت صوتی مفید هستند و به اشتراکگذاری مجموعههای داده ایجاد شده با استفاده از مدلهای داده استاندارد، توسعهدهندگان خدمات را از تعریف مدلهای داده جدید یا ایجاد مجموعههای داده جداگانه برای هر نوع برنامه آزاد میکند [ 5 ]. بنابراین، مدلهای داده استاندارد شده مزایای قابلتوجهی از جمله هزینههای مدیریتی پایین و قابلیت اشتراکگذاری آسان دادهها برای خدمات مرتبط با PWD را ارائه میکنند.
در این زمینه، این مطالعه با هدف توسعه یک مدل داده گسترده برای حمایت از ناوبری داخلی برای PWD با تعریف ویژگیها و روابط مربوط به تحرک PWD در محیطهای داخلی انجام شد. برای پشتیبانی از برنامه ریزی مسیر که اطلاعات موانع را به حساب می آورد، مدل های داده به تازگی بر اساس برنامه IndoorGML طراحی شده اند. تفاوتهایی در محدودیتها و ملاحظات مربوط به ناوبری توسط افراد دارای اختلالات حرکتی و افراد دارای اختلالات بینایی وجود دارد. بنابراین در این پژوهش با تمرکز ویژه بر افراد دارای معلولیت حرکتی، انواع اتاقها، تأسیسات و تأسیسات ساختمانی به عنوان ویژگیها تعریف شده و با تحلیل اطلاعات هندسی و توپولوژیکی، میزان دسترسی به این ویژگیها برای افراد دارای معلولیت مورد بررسی قرار گرفته است. از هر ویژگی سپس یک مدل داده متشکل از آن ویژگی ها با اطلاعات دسترسی مربوطه ساخته می شود. این ساختار اطلاعات فضای داخلی را از نظر تحرک PWD امکان پذیر می کند. علاوه بر این، مدل داده بر اساس IndoorGML، استاندارد فضای داخلی است، و مجموعه داده های تولید شده با استفاده از این مدل را می توان به راحتی بین برنامه های مختلف به اشتراک گذاشته و مبادله کرد. بنابراین، به عنوان یک افزونه IndoorGML، مدل را می توان به راحتی برای بسیاری از خدمات استفاده کرد.
ادامه این مقاله به شرح زیر سازماندهی شده است. بخش 2 مطالعات قبلی را در مورد مدل های فضای داخلی، از جمله مدل های داده مربوطه، به عنوان یک نمای کلی از روندهای تحقیقاتی گسترده در این زمینه، مرور می کند. بخش 3 یک مدل داده توسعه یافته برای افراد دارای معلولیت حرکتی ماژول ناوبری داخلی را ارائه می دهد. بخش 4 روند تولید داده را با اعمال مدل پیشنهادی در یک مرکز خرید تشریح می کند و نتایج برنامه ریزی مسیر را برای سناریوهای مختلف تجزیه و تحلیل می کند. در نهایت، بخش 5 از نتایج پیاده سازی نتیجه گیری می کند و پیشنهاداتی برای کارهای آتی ارائه می دهد.
2. آثار مرتبط
اطلاعات فضایی داخلی به طور فزاینده ای در کاربردهای مختلفی مانند تحلیل ریسک، شناسایی مسیر و مدیریت ساختمان [ 6 ] مورد نیاز است و مطالعاتی در زمینه مدل سازی محیط داخلی انجام شده است. اینها را می توان به سه دسته تقسیم کرد: (1) مفهوم سازی و استانداردسازی محیط داخلی با یک مدل داده، (2) تجزیه و تحلیل مدل های داخلی و داده های مکانی که آنها استفاده می کنند و (3) کاربردهای مدل های فضای داخلی.
مطالعات مدلهای دادههای داخلی بر مفهومسازی، استانداردسازی و بیان فضاهای مختلف تشکیلدهنده محیط داخلی و روابط آنها تمرکز دارد [ 4 ، 5 ، 7 ، 8 ، 9 ، 10 ، 11 ، 12 ، 13 ]، و همچنین تطبیق و متناسب سازی موجود مدل های داده برای نیازهای خدمات کاربردی [ 6]. دو نوع مدل را می توان ایجاد کرد: (1) مدل های داخلی تعمیم یافته برای طبقات گسترده ای از کاربران. (2) مدل هایی برای اهداف خاص. بسیاری از مطالعات مدلسازی را بر اساس استانداردهای فضای داخلی انجام داده اند. این مدل ها عبارتند از CityGML، IndoorGML، و مدل اطلاعات مکانی تعریف شده در ISO19107 [ 5 ، 8 ، 10 ، 13 ، 14 ، 15 ، 16 ، 17 ].
“ماژول هسته IndoorGML” از اجزای اصلی مدل سازی تشکیل شده است، در حالی که “ماژول ناوبری IndoorGML” به توسعه ماژول اصلی اشاره دارد. این ماژول ناوبری بر اساس یک مدل داده باز برای اطلاعات فضایی داخلی و IndoorGML، استاندارد کنسرسیوم فضایی باز (OGC) برای طرح XML است. برخلاف CityGML مبتنی بر شی، IndoorGML فضاهای داخلی را به صورت محدود، فضاهای معنایی نشان میدهد و بنابراین مدلهای مبتنی بر IndoorGML برای بیان ارتباط فضاهای داخلی مختلف مناسبتر هستند [ 1 ، 2 ]. در [ 8]، یک مدل طبقه بندی فضا پیشنهاد شده است که هر دو ویژگی معنایی و هندسی فضا را در هستی شناسی فضای داخلی در نظر می گیرد. اثربخشی این مدل با طراحی یک پسوند IndoorGML با استفاده از کلاسهای پیشنهادی، از جمله اجزای نحوی و معنایی نشان داده شد. با این حال، اطلاعات معنایی در آن مدل داده برای استفاده در خدمات مربوط به PWD بسیار عمومی است. در [ 10 ]، گسترشی از ماژول اصلی IndoorGML برای ترکیب اطلاعات معنایی پیشنهاد شد زیرا ساختار IndoorGML در آن زمان از ذخیره سازی اطلاعات معنایی پشتیبانی نمی کرد. علاوه بر این، کیم و همکاران. [ 9] مدل داده های فضایی داخلی (ISDM) را برای پشتیبانی از ساخت اطلاعات مکانی که می تواند برای خدمات پیچیده مبتنی بر مکان داخلی با اطلاعات توپولوژی استفاده شود، توسعه داد. ISDM کلاسهای ویژگی اضافی را برای نمایش فضاهای داخلی در مدل ویژگی مبتنی بر پسوند دامنه برنامه کاربردی CityGML (ADE) و مدل توپولوژی مبتنی بر IndoorGML تعریف میکند. ایسیکداگ و همکاران [ 4 ] یک مدل BIM گرا برای تبدیل یک BIM اصلی به یک مدل داده داخلی ساختمان گرا برای ناوبری داخلی پیشنهاد کرد. مدل پیشنهادی بر روی یک سناریوی واکنش اضطراری آزمایش شد و نویسندگان گزارش دادند که استفاده از مدلهای فضای داخلی به دلیل فقدان اطلاعات هندسی و معنایی «مناسب و کاربردی» محدود است.
برای رفع این محدودیتها، مطالعاتی نیز بر روی مدلهای دادههای داخلی برای کاربران خاص، مانند افراد کم بینا یا افراد با صندلی چرخدار (PWW) انجام شده است [ 5 ، 7 ، 18 ]. آیدا و همکاران [ 5 ] ناوبری صوتی آگاهانه از نقطه عطف پیشنهاد شده است، که به موجب آن یک ساختار داده برای توصیف اطلاعات نقطه عطف به عنوان توسعه IndoorGML 1.0 با فضاهای جدید تعریف شده استفاده می شود. با این حال، اگرچه آنها یک مدل داده استاندارد شده را تعریف کردند که شامل اطلاعات شاخص است، طراحی مدل دقیق نبود، و محدودیتهای مربوط به حرکت به طور کامل منعکس نشد، زیرا این روش توسعه یک سیستم ناوبری صوتی بود. لیو و زلاتانوا [ 18] یک مدل فضای ناوبری داخلی (INSM) ساخته است که به طور خودکار نمودارهای اتصال را برای ساختمان ها با استفاده از اطلاعات معنایی تولید می کند و انواع مختلف فضاهای ساختمان، از جمله موانع را که برای عابران پیاده غیرقابل دسترس هستند، تعریف می کند. لی و همکاران [ 7] از ترکیبی از لایههای هندسی، توپولوژیکی و معنایی برای جبران عیوب سایر مدلهای ترکیبی استفاده کرد و یک مدل ابعادی فضای داخلی پیشنهاد کرد که از مسیریابی بدون مانع پشتیبانی میکند. آنها همچنین فرآیندی را برای ساخت یک مدل فضای داخلی با استخراج عناصر و فضاهای فرعی با استفاده از پلان طبقات به عنوان داده منبع و ایجاد روابط فضایی پیشنهاد کردند. با این حال، آنها دسترسی PWD را از طریق یک عملیات Boolean در لایه معنایی بهجای محدودهای از دسترسی بر اساس ویژگیهای خاص اشیاء در نظر گرفتند و اطلاعات خاص PWW را برای دسترسی به درب محدود کردند. بنابراین، در نظر گرفتن مؤثر خدمات فضایی داخلی واقعی موجود برای PWD نیاز به مدلسازی ویژگی بسیار دقیقتری دارد.
در زمینه تحلیل دادههای مدل فضای داخلی، مطالعاتی برای تحلیل اتصال، دسترسی و دید بین فضاها با تمرکز بر ویژگیهای فضاهای داخلی همراه با توسعه مدلهای داده انجام شده است. تجزیه و تحلیل اتصال شامل مضامینی مانند ایجاد توپولوژی و فاصله گذاری است، در حالی که تجزیه و تحلیل دسترسی شامل تعریف شاخص های دسترسی و راه رفتن است. از نظر خدمات PWD، اطلاعات دسترسی برای هر فضا بسیار مهم است [ 19 ]، و اتصال بین فضاها باید بر اساس فضاها و اشیایی که PWD می تواند از آن عبور کند پیکربندی شود. در این زمینه کریمی و غفوریان [ 20] یک تکنیک جدید برای ناوبری مسیر ارائه کرد که نیازها و ترجیحات خاص کاربر را بر اساس قانون آمریکایی های دارای معلولیت (ADA) برآورده می کند [ 21 ]. آنها «کاربران خاص با نیازهای ویژه» را به عنوان افرادی که دارای اختلال بینایی، اختلال حرکت، اختلال شناختی یا مسن هستند، تعریف کردند و دو الگوریتم برای محاسبه شبکه راهرو و برای ناوبری مسیر در دسترس پیشنهاد کردند. پس از آن، آنها از یک شبکه راهروی خود تعریف شده با ساختاری ساده به عنوان مجموعه آزمایشی برای تأیید الگوریتم های پیشنهادی خود استفاده کردند. با این حال، به دلیل عدم وجود یک مدل استاندارد داخلی، استفاده و به اشتراک گذاری داده ها و الگوریتم های ارائه شده توسط آنها محدود است. هاشمی و کریمی [ 22] با اشاره به تلاش مورد نیاز برای رسیدن به ورودی ساختمان، تجزیه و تحلیل دسترسی داخلی را با تمرکز بر خروجی پذیری انجام داد. آنها عناصری را تعریف کردند که بر دسترسیپذیری تأثیر میگذارند، نمودارهایی را با مدلسازی عناصر ایجاد کردند، یک شاخص دسترسی برای هر عنصر طراحی کردند، و یک الگوریتم مسیریابی تخلیه PWD را توسعه دادند. با این حال، آنها از یک مدل استاندارد داخلی استفاده نکردند و تنها به بهبود شاخص توجه داشتند. در رویکردی مشابه، هاشمی [ 23 ] یک شاخص دسترسی برای تحلیل مسیریابی با معیارهای اضافی برای جستجوی مسیرهای قابل دسترس برای PWW در تخلیه اضطراری پیشنهاد کرد. علاوه بر این، شین و لی [ 24] یک چارچوب ارزیابی برای طراحی داخلی ایجاد کرد تا مشکلات طراحی پیچیده را با تمرکز بر قابلیت راه رفتن گردش ساختمان در محیط BIM ساده کند. آنها تجزیه و تحلیل داخلی واحدهای فضایی را انجام دادند، اما بیان کردند که تجزیه و تحلیل واحدهای شی (ویژگی) نیز به دلیل متغیرهای زیادی در محیط داخلی مورد نیاز است.
مطالعات برنامههای کاربردی مدل داخلی معمولاً بر اتوماسیون ساخت داده یا موضوعات ناوبری خاص، مانند ادغام محیطهای داخلی و خارجی برای اهداف خاص مانند تخلیه متمرکز شدهاند. وانگ و نیو [ 25] یک مدل داده را مورد بحث قرار داد که اجزای داخلی افقی و عمودی را با استفاده از نقشه های اولیه OpenStreetMap (گره ها، راه ها، روابط) و برچسب ها نشان می دهد. آنها سپس یک گردش کار ارائه کردند که امکان تولید خودکار نمودارهای مسیریابی را بر اساس مدل داده پیشنهادی، همراه با الگوریتمی برای محاسبه مسیرهای داخلی و خارجی فراهم میکند. با این حال، تحقیقات آنها افراد عادی را هدف قرار داده است و بنابراین برای کاربردهای PWD کافی نیست. علاوه بر این، این رویکرد به دلیل ساختار دادههای خاص OpenStreetMap که به عنوان پایه استفاده میشود، تنها قابلیت گسترش محدودی را ارائه میدهد. چندین مطالعه در مورد یافتن مسیر برای کاربران با نیازهای ویژه، مانند PWD، نیز انجام شده است [ 26 , 27 , 28 , 29 , 30]. مطالعات انجامشده عمدتاً با مدلهای داخلی که شامل اطلاعات موانع برای افراد دارای اختلال حرکتی است، سروکار دارد. با این حال، اگرچه بسیاری از مطالعات مربوط به کاربردهای مدل داخلی – مانند پیشنهاد الگوریتم های مسیریابی – انجام شده است، آنها به استفاده گسترده از نتایج تحقیقات بدون هیچ مدل یکپارچه و استاندارد محدود شده اند.
میز 1یافته های کلیدی مطالعات مربوطه را خلاصه می کند. به طور خلاصه، تعدادی از مطالعات قبلی بر توسعه روشهای تجزیه و تحلیل دسترسی و الگوریتمهای مسیریابی مرتبط با حرکات داخلی افراد دارای معلولیت حرکتی متمرکز شدهاند. در میان مطالعات انجام شده بر روی مدلسازی فضای داخلی، مدلهای موجود را نمیتوان برای ناوبری داخلی برای افراد دارای معلولیت حرکتی به کار برد، زیرا مدلهای موجود اطلاعات دقیق در مورد محدودیتهای حرکتی را شامل نمیشوند. برای توسعه خدمات یا سیستمهای مؤثر که نیازها و ترجیحات افراد دارای معلولیت حرکتی را در نظر میگیرند، مدلهای داخلی و مجموعه دادهها باید از طریق یک مدل داده استاندارد شده به اشتراک گذاشته شوند که تحرک PWD را در نظر میگیرد. بنابراین، در این مطالعه،
3. روش ها: مدل داده توسعه یافته ماژول ناوبری IndoorGML برای افراد دارای معلولیت حرکتی
3.1. هسته IndoorGML و ماژول ناوبری
IndoorGML [ 31 ، 32 ]، که یک طرح برنامه کاربردی GML است، می تواند از دو ماژول تشکیل شده باشد: یک ماژول اصلی و یک ماژول توسعه. ماژول اصلی شامل مدلهای دادههای معمولی است و ویژگیهای هندسی و توپولوژیکی فضاهای داخلی را بیان میکند. ماژول هسته یک ساختار چند لایه است که از تعدادی لایه فضایی تشکیل شده است و شامل یک اتصال بین فضایی است که نشان دهنده یک اتصال بین لایه ای است. علاوه بر این، هر لایه فضایی از یک حالت که نماد یک واحد فضایی است و یک انتقال نشان دهنده یک لبه بین حالت ها تشکیل شده است. در ماژول هسته، اطلاعات هندسی را می توان با درج مستقیم آن در سند GML از طریق GM_Solid یا با اشاره به یک شی خارجی از طریق XLink بیان کرد [ 1 ، 2 ،31 ، 32 ].
ماژول های افزونه ماژول اصلی را برای اهداف خاصی گسترش می دهند. یک ماژول ناوبری داخلی شامل تمام محتویات ماژول اصلی است و یک ویژگی فضای ناوبری را اضافه می کند که شامل یک فضای عمومی برای اقامت و یک فضای انتقال برای سفر است. ماژول افزونه IndoorGML را می توان به طور مداوم بسته به برنامه اضافه کرد، بنابراین پسوندهایی برای اهداف مختلف پیشنهاد شده است [ 8 ، 10 ، 11 ، 16 ، 17 ]. این مطالعه یک برنامه افزودنی IndoorGML برای پشتیبانی از ناوبری داخلی برای افراد دارای معلولیت حرکتی در محیط های داخلی ایجاد کرد.
3.2. ماژول ناوبری PWD IndoorGML
3.2.1. تفسیرهای مختلف از فضای داخلی
فضاهای داخلی را می توان با توجه به هدف بازنمایی متفاوت نشان داد. برای مثال، حتی همان فضای داخلی ممکن است از طریق مسیرهای مختلف بسته به ابزار حرکت پیمایش شود، و بنابراین همانطور که در شکل 1 نشان داده شده است، تفسیر متفاوتی خواهد داشت [ 1 ، 33 ].
برخی از اجزای ساختمان در محیط های داخلی وجود دارد که برای افراد دارای معلولیت حرکتی غیرقابل دسترسی است، بنابراین در انتخاب مسیر بهینه باید این اجزا را به عنوان موانع در نظر گرفت. به عنوان مثال، PWW نمی تواند وارد فضایی با دری با عرض ناکافی شود. مدلهای داده باید شامل چنین اطلاعات مرتبطی باشند تا به طور مؤثر به این وضعیت پاسخ دهند [ 25 ]. بنابراین، برای حمایت از افراد دارای معلولیت حرکتی با محدودیت، باید فضایی کاملاً متفاوت از فضای مورد استفاده برای عابران پیاده تعریف شود.
3.2.2. عوامل مهمی که بر تحرک PWD در محیط های داخلی تأثیر می گذارد
به منظور استفاده از مدل داده در مسیریابی برای افراد دارای معلولیت حرکتی، ویژگیهای هر ویژگی مدل داده باید به تفصیل شرح داده شود. در این مطالعه، عواملی که می توانند بر حرکت افراد دارای معلولیت حرکتی در داخل خانه تأثیر بگذارند، از معیارهای مربوطه استخراج شده و سپس این عوامل به عنوان مبنایی برای طراحی ویژگی های ویژگی های PWD مورد استفاده قرار می گیرند.
ADA برای ساختمان ها به نیازهای ویژه افراد دارای اختلال حرکتی و بینایی می پردازد [ 20 ]. در [ 22 ، 23 ]، الزامات تعیین شده توسط ADA برای ویژگی هایی (راهروها، راه پله ها، درها، رمپ ها و آسانسور) که ممکن است بر دسترسی افراد دارای معلولیت حرکتی در طول تخلیه تأثیر بگذارد، بررسی شده است. علاوه بر این، مانند ADA، سیستم گواهینامه بدون مانع (BFCS) [ 34 ] در کره ایجاد شد تا یک استاندارد طراحی برای ساختمان ها ارائه دهد که راحتی حرکت PWD در داخل خانه را تضمین می کند. جدول 2فاکتورهای قابل توجهی را برای تحرک PWD در داخل خانه نشان می دهد که از ADA، BFCS و مطالعات مرتبط برای هر ویژگی استخراج شده است. برخی از مطالعات عملی وجود دارد که ویژگیهایی را که بر حرکت افراد دارای معلولیت حرکتی از طریق مصاحبه و مطالعات تجربی تأثیر میگذارند، بررسی کردهاند. بر اساس نتایج [ 35 ]، مشخص شد که رمپ ها و پله ها به شدت مانع حرکت افراد دارای ویلچر می شود. علاوه بر این، طبق مصاحبه های انجام شده در [ 36 ]، پله ها محدودیت قابل توجهی هستند، به ویژه در موقعیت های تخلیه. علاوه بر این، جیانگ و همکاران. [ 37 ] به طور تجربی تأیید کرد که عرض معابر و پله ها بر تحرک افراد دارای اختلال حرکتی تأثیر می گذارد. در [ 38]، یک مطالعه تجربی انجام شد و مشخص شد که تحرک PWD تحت تاثیر ویژگی های درب مانند عرض باز شدن است. به این ترتیب، می توان تأیید کرد که ویژگی های به دست آمده از مطالعات تجربی در ویژگی ها و عوامل خلاصه شده در جدول 2 گنجانده شده است .
اگرچه بیشتر ساختمانهای جدید بر اساس استانداردهای دسترسی بالا ساخته میشوند، ساختمانهایی با عناصر غیرقابل دسترس همچنان وجود دارند. ارائه اطلاعات در مورد راهروهای غیرقابل دسترس یا POI (مانند توالت هایی که دسترسی به آنها به دلیل نقاط برجسته دشوار است) می تواند کمک بزرگی به افراد دارای نیازهای ویژه در هنگام برنامه ریزی برای فعالیت در ساختمان باشد.
از میان عوامل نشان داده شده در جدول 2 ، پنج ویژگی زیر و عوامل مرتبط به عنوان ضروری در اعمال معیارهای سختگیرانه برای ناوبری داخل ساختمان برای افراد دارای معلولیت حرکتی استخراج شدند.
-
راهروها: عرض (عرض راهرو، عرض چرخش)، شیب (دویدن، متقاطع)، تغییرات سطح (عمودی، اریب)، نقطه برجسته روی زمین
-
راه پله: با آسانسور ویلچر، با سطح شیب دار
-
درب ها: عرض، ارتفاع، جهت باز شدن، نوع درب، درب های اتوماتیک، آستانه در
-
سطح شیب دار: عرض، شیب (دویدن، متقاطع)، عرض چرخش، نرده ها در دو طرف
-
آسانسورها: مساحت، عرض عبور، دکمه کنترل
برای این پنج ویژگی (راهروها، راه پلهها، درها، رمپها و آسانسورها)، مقادیر واقعی برخی از عوامل مانند عرض، ارتفاع و مساحت را میتوان به آستانههایی اختصاص داد (“بیش از آستانه”، “زیر آستانه” یا ” هیچ”) که دسترسی را تعیین می کند، همانطور که در بخش زیر توضیح داده شده است.
3.2.3. ویژگی های مربوط به ناوبری برای افراد دارای معلولیت حرکتی
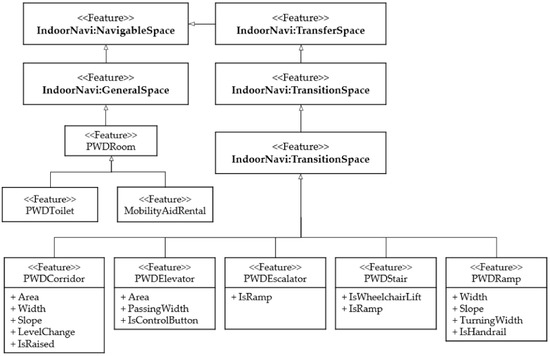
بر اساس عوامل تحرک PWD که در بخش قبل تعریف شد، ماژول PWD توسعه یافته را طوری طراحی کردیم که شامل ویژگی هایی باشد که محیط داخلی را با تمرکز بر افراد دارای معلولیت حرکتی نشان می دهد. این ویژگیها در سه دسته تعریف میشوند: فضاهای قابل کشتیرانی فضاهای داخلی هستند که فعالیتها در آن انجام میشود، تأسیسات داخلی از تحرک و فعالیتهای PWD پشتیبانی میکنند، و Opening Boundaries اجازه ورود و خروج از فضا را میدهد. هر ویژگی شامل اطلاعات ویژگی مربوط به حرکات افراد دارای معلولیت حرکتی است. ویژگی های مدل توسعه یافته به شرح زیر است.
- (1)
-
فضای قابل کشتیرانی برای افراد دارای معلولیت حرکتی
در ماژول ناوبری داخلی موجود، ویژگیهای فضای قابل ناوبری شامل فضای عمومی است که فعالیتها در آن رخ میدهد، مانند اتاقها و لابیها، و همچنین فضای انتقالی که امکان حرکت را فراهم میکند [ 1 ، 32 ]. در این مطالعه، فضای عمومی و فضای انتقال برای افراد دارای معلولیت حرکتی همانطور که در شکل 2 نشان داده شده است ، با در نظر گرفتن ویژگیهای حرکات افراد دارای معلولیت حرکتی، بازتعریف میشود. هاشمی و کریمی [ 22 ] مطالعات قبلی را تجزیه و تحلیل کردند تا به این نتیجه برسند که عناصر مؤثر بر دسترسی و راحتی معلولیتهای معلولیتی، راه پلهها، آسانسورها، درها، راهروها و رمپها هستند. در مطالعه حاضر، ما زیر کلاس های GeneralSpace و TransitionSpace را اضافه کردیمبر اساس عناصر [ 22 ] ( شکل 2 ). GeneralSpace شامل ویژگیهای PWDRoom ، مانند PWDToilet و MobilityAidRental است که به فضاهایی اشاره دارد که عمدتاً برای افراد دارای معلولیت حرکتی در نظر گرفته شده است، مانند توالتهای در دسترس و مغازههای اجاره وسایل کمک حرکتی.
PWD با پله ها مشکل دارد و حرکت ویلچر به شدت تحت تأثیر ویژگی های فضاهای مسطح است، مانند عرض راهرو. بنابراین، TransferSpace باید اهداف طراحی متفاوتی نسبت به اهداف مورد استفاده برای عابران پیاده داشته باشد. از آنجایی که PWD محدودیتهای زیادی را در حرکت عمودی، بهویژه سفرهای بین لایهای تجربه میکند، امکانات و فضاها باید برای پشتیبانی از حرکت عمودی توسط PWD، با TransitionSpace شامل ویژگیهای مرتبط به عنوان کلاسهای فرعی تعریف شوند.
در محیط های داخلی از پله ها، پله برقی، آسانسور و رمپ برای اتصال طبقات چند طبقه استفاده می شود. آسانسورها می توانند طبقات دوردست را به هم متصل کنند، در حالی که پله ها، پله برقی ها و رمپ ها طبقات مجاور را با اتصال هر سطح متوالی به هم متصل می کنند [ 4 ]. این ویژگیها بهعنوان PWDElevator ، PWDStair، PWDEscalator ، و PWDRamp مجدداً تعریف شدند و همانطور که در شکل 2 نشان داده شده است ، به عنوان زیرمجموعههای TransitionSpace اضافه شدند. PWDStair کلاسی است که دارای ویژگی هایی برای نشان دادن نصب یا عدم نصب آسانسور ویلچر است. PWDElevator _ویژگیهای «مساحت» و «عرض عبور» بهمنظور نشاندهنده ظرفیت برای جا دادن ویلچر داده شد، و PWDRamp ویژگیهای «شیب» را برای ارائه اطلاعات به PWD در مورد درجه چالش مرتبط با در دسترس بودن سطح شیب دار داده شد. به مقادیر مشخصههایی مانند مساحت، شیب و عرض، مقادیر صحیح 0، 2 یا 1 مربوط به سه مرحله – به ترتیب قابل عبور، غیرقابل عبور یا دشوار – بر اساس کلاسهای آستانه از پیش تعریفشده اختصاص داده شد، که ویژگی بیش از آن در نظر گرفته میشود. . این رویکرد نه تنها انعطافپذیری در استفاده از ویژگیها را ممکن میسازد، بلکه محاسبات را نیز ساده میکند، زیرا معیارهای مختلفی از سیستمهای مختلف را میتوان برای تعیین آستانهها اعمال کرد.
- (2)
-
نصب داخل ساختمان برای افراد دارای معلولیت حرکتی
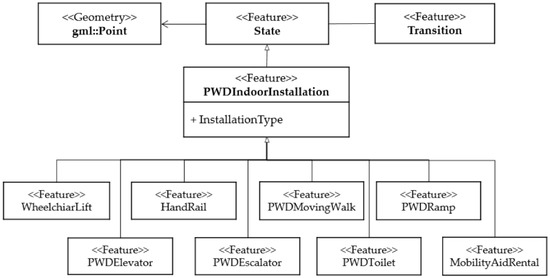
ویژگیهای Indoor Installation برای افراد دارای معلولیت حرکتی را میتوان به عنوان امکانات یا فضاهای نصب شده برای پشتیبانی از فعالیتهای داخلی PWD تعریف کرد. ویژگی برتر سلسله مراتب Indoor Installation PWDIndoorInstallation است که به عنوان یک ویژگی حالت ماژول هسته IndoorGML ارائه می شود. ویژگیهای PWDIndoorInstallation شامل تأسیسات داخلی مانند آسانسورهای ویلچر، پیادهروی متحرک، و نردههایی برای کمک حرکت است که میتوانند به عنوان POI نیز عمل کنند. علاوه بر این، فضاهایی مانند توالت های در دسترس و مغازه های اجاره کمک حرکتی نیز می توانند به عنوان POI کار کنند و می توانند به عنوان ویژگی های فرعی PWDIndoorInstallation اضافه شوند ( شکل 3 ).
- (3)
-
باز کردن مرزها برای افراد دارای معلولیت حرکتی
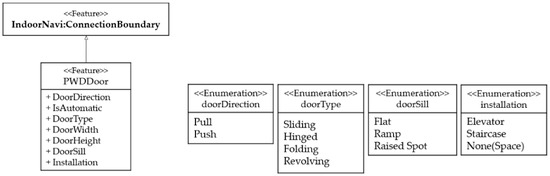
برنامه ریزی مسیر برای افراد دارای معلولیت حرکتی به فضاهای داخلی را می توان با عرض و ارتفاع ورودی، نوع در، وجود یک نقطه برجسته و جهت باز شدن در محدود کرد [ 19 ، 20 ، 22 ، 23 ، 27 . ]. در ماژول ناوبری IndoorGML، دهانه ها به عنوان مرزهای اتصال تعریف می شوند و بنابراین ویژگی PWDDoor به عنوان زیرمجموعه ای از مرز اتصال تعریف می شود که شامل جزئیات مربوط به برنامه ریزی مسیر PWD است، همانطور که در شکل 4 نشان داده شده است.. ویژگیهای عرض و ارتفاع درب مقادیر صحیحی را دریافت میکنند که نشاندهنده سه مرحله توصیفشده در بالا (قابل عبور، غیرقابل عبور و سخت) بر اساس آستانههای از پیش تعریفشده است.
3.2.4. ساختار مدل توسعه داخلی GML برای افراد دارای معلولیت حرکتی
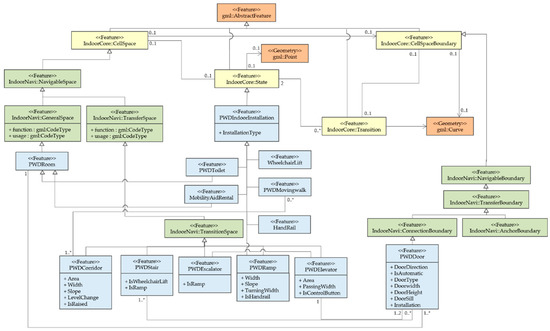
شکل 5 یک نمودار کلاس زبان مدلسازی یکپارچه (UML) از ماژول توسعه PWD پیشنهادی را نشان می دهد. ویژگیهای جدید طراحی شده به بخشهایی از هسته IndoorGML و ماژولهای ناوبری متصل میشوند تا بتوان آنها را در برنامه افزودنی IndoorGML قرار داد. ویژگیهای کلیدی این مدل افزونه بهعنوان زیر کلاسهای State، CellSpace ، و CellSpaceBoundary ماژول هسته IndoorGML تعریف شدهاند. با ویژگی های “آبی” در شکل 5 بیان شده است.
PWDEscalator ، PWDRamp ، و PWDElevator زیر کلاس های PWDIndoorInstallation هستند و همچنین به عنوان زیر کلاس های TransitionSpace ماژول ناوبری داخلی عمل می کنند. علاوه بر این، PWDCorridor و PWDStair نیز به عنوان ویژگی های فرعی TransitionSpace اضافه شده اند . این ویژگی ها اطلاعات مربوط به ویژگی های فیزیکی فضا، ویژگی ورودی و وجود موانع را ذخیره می کنند. ویژگی PWDInstallation می تواند به عنوان POI عمل کند و اطلاعات دسترسی را در برنامه های بعدی ارائه دهد. ویژگی PWDDoor به عنوان زیر کلاس تعریف شده استConnectionBoundary از ماژول ناوبری داخلی، و در نهایت به عنوان بخشی از CellSpaceBoundary ماژول اصلی عمل می کند. شکل 5 همچنین تعدد بین ویژگی هایی را که در یک رابطه ارتباطی در نمودار کلاس UML قرار دارند را نشان می دهد. ویژگی هندسی ویژگی های اضافه شده از ویژگی های متناظر ماژول هسته، مانند CellSpace ، CellSpaceBoundary و State ناشی می شود.
4. اجرای سناریو محور مرکز خرید جهانی Lotte
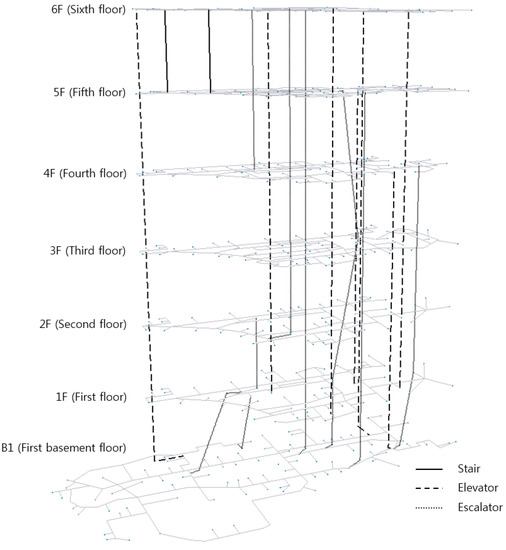
برای تأیید اثربخشی مدل پیشنهادی، مرکز خرید Lotte World در سئول را به عنوان ساختمان آزمایشی که مدل بر روی آن اعمال خواهد شد، انتخاب کردیم. این مرکز خرید ساختمانی چند طبقه با ساختاری پیچیده است که اتصالات عمودی زیادی را در بر می گیرد و در شکل بیرونی هر طبقه متفاوت است. این ساختمان شامل یک زیرزمین و شش طبقه فوقانی است که هر طبقه از طریق پلکان، آسانسور و پله برقی به طبقه بعدی متصل می شود. برای آزمایش مناسب است زیرا فضاهای مرتبط زیادی مانند توالت برای افراد معلول و مغازه های اجاره ویلچر در هر طبقه وجود دارد. علاوه بر این، داده های ساختمان چند طبقه مناسب را می توان ایجاد کرد زیرا به راحتی می توان تصاویر نقشه راهنما برای طبقات را به دست آورد. علاوه بر این، ویژگیهای مرتبط و ویژگیهای آنها به خوبی در آن تصاویر نقشه نشان داده شده است. مدل داده PWD ازبخش 3 با استفاده از پایگاه جغرافیایی ArcGIS پیاده سازی شد. فضای قابل کشتیرانی، نصب در داخل ساختمان و مرز باز کردن برای ویژگیهای PWD در برنامه افزودنی برای تأیید مدل پیشنهادی برای کاربرد در خدمات ناوبری داخلی برای افراد دارای معلولیت حرکتی پیادهسازی شد. اطلاعات عملکردی مربوط به تاسیسات داخلی و فضاهای قابل پیمایش با انواع ویژگی ها در پایگاه جغرافیایی ذخیره شد. با استفاده از تصویر نقشه راهنما، یک پایگاه جغرافیایی داخلی با حالت ها و انتقال ها مطابق قوانین نشان داده شده در جدول 3 ایجاد شد و عوامل ارائه شده در بخش 3.2 به عنوان ویژگی ها تولید شدند. همانطور که قبلاً ذکر شد، ویژگی های ویژگی های PWD بر اساس عوامل مربوطه که در بخش 3.2.2 مشتق شده بودند طراحی شدند.و بیشتر عواملی مانند شکل، اندازه و شیب نمایانگر خصوصیات هندسی فضاها و ویژگی های واقعی هستند. بنابراین، هنگام جستجوی مسیرهای امکان پذیر با استفاده از داده های شبکه ساخته شده بر اساس مدل داده پیشنهادی، می توان با استفاده از اطلاعات ویژگی، اشکال واقعی ویژگی ها و فضاها را در نظر گرفت. «دسترسپذیری» که یکی از ویژگیها است، بسته به عوامل مختلفی که در قالب ویژگی برای هر ویژگی ذخیره میشود، مقادیر بولی یا قابل دسترسی (T) یا غیرقابل دسترسی (F) به آن اختصاص داده شد تا محاسبات سادهتر شود. در طول برنامه ریزی مسیر
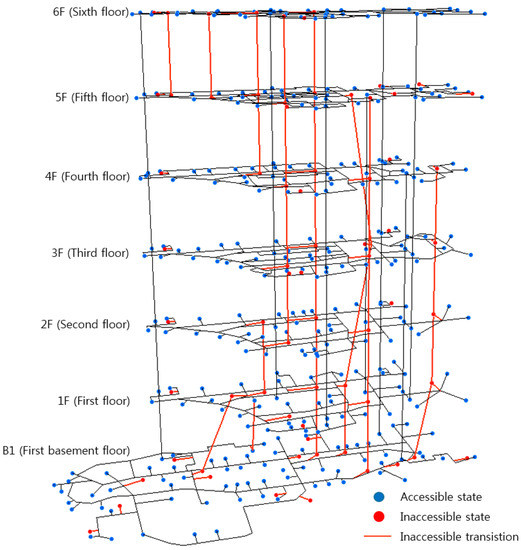
شکل 6 نتیجه تجسم سه بعدی مجموعه داده های تولید شده برای مرکز خرید Lotte World را نشان می دهد. پیوندهای متصل برای حرکت عمودی در میان انتقال های تولید شده با استفاده از انواع مختلف خطوط (خط پررنگ، خط تیره و خط نقطه چین) برجسته می شوند. طبقه زیرزمین اول نسبت به سایر طبقات دارای اندازه بزرگتری است و همانطور که در شکل 6 نشان داده شده است ، در مقایسه با بیرونی ترین قسمت سمت چپ طبقه اول، بیشتر به سمت چپ امتداد دارد. عوامل مهمی که دسترسی به انتقال افقی را تعیین می کند، همانطور که توسط مدل داده توصیف شده است، عرض و شیب راهرو یا وجود یک نقطه برجسته روی آن است. راهروهای ساختمان آزمایشی از یک مسیر افقی با عرض کافی و بدون شیب تشکیل شده است. علاوه بر ایندرهای PWD فضاها به دلیل ماهیت مرکز خرید همیشه باز هستند یا به طور خودکار باز می شوند. بنابراین، تقریباً هر انتقالی با توجه به سفر افقی قابل دسترسی است به جز انتقال هایی که فقط به حالت های غیرقابل دسترسی متصل هستند. با این حال، برای سفرهای عمودی، انتقالهایی که نشاندهنده اتصالات بین طبقات از طریق پلهها و پلههای برقی بدون هیچ کمکی مانند بالابر ویلچر هستند، غیرقابل دسترسی هستند. علاوه بر این، حالتهای پلهها و پلههای برقی بهعنوان PWDIdoorInstallation نیز غیرقابل دسترس هستند، در حالی که آسانسورهایی با اندازه کابین و ورودی کافی حالتها و انتقالهایی برای حرکت عمودی هستند. خاطرنشان می شود که این مرکز خرید شامل یک پله برقی به نام “پله برقی سریع” است که دو طبقه را به طور همزمان به هم متصل می کند. شکل 7دسترسی عناصر ساختمان آزمایشی را بر اساس دانش قبلی آن مرکز خرید به دست آمده از طریق تجربیات در محل و اطلاعات POI موجود در نقشه راهنما نشان می دهد. مغازههای اجاره وسایل کمک حرکتی و توالتها برای معلولان میتوانند بهعنوان PWDRooms نشان داده شوند . در شکل 7 ، انتقالهای عمودی غیرقابل دسترس با خطوط یکدست قرمز بیان شدهاند، و قابلیت دسترسی به حالتها با دایرههای رنگی نشان داده شده است.
دو مورد با استفاده از داده های تولید شده توسط مدل پیشنهادی مورد آزمایش قرار گرفتند: (1) برنامه ریزی مسیر در یک طبقه و (2) برنامه ریزی مسیر شامل حرکت چند طبقه. برای هر مورد، ما به طور تصادفی یک نقطه شروع و یک نقطه رسیدن را برای محاسبه کوتاهترین مسیر با استفاده از الگوریتم Dijkstra انتخاب کردیم و سپس تأیید کردیم که آیا مسیر استخراجشده عناصر غیرقابل دسترس برای افراد دارای معلولیت حرکتی را منعکس میکند یا خیر. به طور خاص، مشابه ONALIN-FN [ 20] که برای استخراج شبکه امکان پذیر استفاده می شود، هزینه بی نهایتی را به عناصر غیرقابل دسترسی اختصاص دادیم. سپس از الگوریتم Dijkstra برای یافتن مسیر بهینه برای افراد دارای معلولیت حرکتی استفاده کردیم. مسیر محاسبهشده با الگوریتم Dijkstra را میتوان تحت دو فرض بهینه در نظر گرفت: (1) کوتاهترین مسیر در میان گرهها و پیوندهای قابل دسترسی انتخاب میشود و (2) زمان سفر مورد نیاز برای استفاده از پلهها، پلههای برقی و آسانسورها معادل هستند. . سپس، تأیید کردیم که آیا مسیر استخراج شده عناصر غیرقابل دسترس برای افراد دارای معلولیت حرکتی را منعکس می کند یا خیر.
4.1. مورد 1: ناوبری تک طبقه
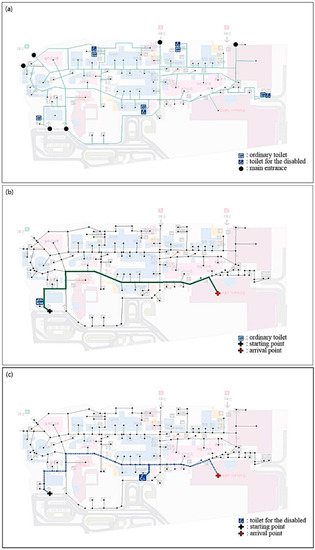
اولین داده سطح زیرزمین (B1) با ویژگی های مختلف PWD برای ناوبری داخلی در یک طبقه انتخاب شد. شکل 8 نتیجه برنامه ریزی مسیر را برای مسیر هدف از ورودی غربی (نقطه شروع) تا آکواریوم (مقصد)، در ضلع شرقی همان طبقه، از طریق توالت، با استفاده از اطلاعات مربوط به توالت های معمولی و توالت های قابل دسترسی PWD نشان می دهد. . شکل 8 الف ورودی های اصلی، توالت های معمولی و توالت های قابل دسترسی PWD را نشان می دهد و در شکل 8 b,c، نقطه شروع با یک ضربدر سیاه و نقطه ورود با یک صلیب قرمز مشخص شده است. برای همان نقاط شروع و مقصد، خط جامد نشان دهنده مسیر بهینه برای کاربر عمومی است ( شکل 8ب) و خط نقطه چین نشان دهنده مسیر بهینه برای استفاده کننده از افراد دارای معلولیت حرکتی است ( شکل 8 ج). شکل نشان میدهد که توالتهای مختلفی برای دو گروه انتخاب شدهاند، زیرا توالت انتخاب شده برای مسیر عمومی قابل دسترسی برای PWD نبود. بنابراین، مدل پیشنهادی به طور کامل اطلاعات ویژگی مربوطه را هنگام برنامه ریزی مسیر منعکس می کند.
جدول 4 مسافت خط مستقیم و طول سفر تخمینی بین مبدا و مقصد را برای هر یک از دو مسیر نشان می دهد. فاصله از مجموع فاصله خط مستقیم از نقطه شروع تا توقفگاه و فاصله خط مستقیم از توقفگاه تا مقصد محاسبه شد. فاصله خط مستقیم مسیر PWD کمتر از عابران پیاده معمولی است، اما طول سفر واقعی بیشتر است زیرا، اگرچه مسیر کلی مشابه است، مسیرهای مورد نیاز برای دسترسی به توالت های مربوطه کمی متفاوت است.
4.2. مورد 2: ناوبری چند طبقه
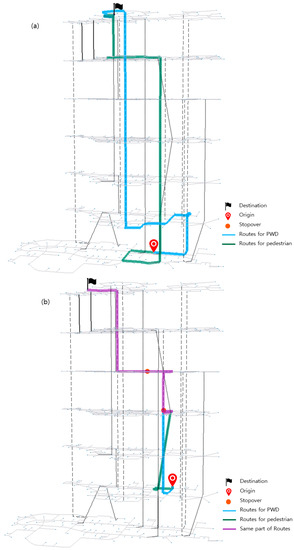
به عنوان مورد دیگری برای تأیید مدل، ما سفرهایی را که شامل حرکات بین طبقه بود و شکل 9 را هدف قرار دادیمنتایج ایجاد شده برای مسیرهای بهینه برای عابران پیاده (خط سبز) و افراد دارای معلولیت حرکتی (خط زرد) را نشان می دهد. برای اطمینان از حرکت بدون هیچ کمکی، مسیر استخراج شده برای افراد دارای معلولیت حرکتی نباید دارای موانع باشد و در حرکت بین طبقاتی، مسیرهای بهینه برای افراد دارای معلولیت حرکتی و عابران پیاده کاملاً متفاوت است. بر خلاف عابران پیاده که از طریق پله ها و پله برقی ها می توانند بین طبقات حرکت کنند، کاربران ویلچر فقط می توانند از طریق آسانسورهایی با فضای کافی یا پله ها و پله های برقی با امکانات کمکی مانند بالابر ویلچر بین طبقات حرکت کنند. این رفتار متفاوت را می توان به وضوح در نتایج مسیریابی در شکل 9 مشاهده کرد. در شکل 9الف، تقاطع نزدیک فروشگاه H&M واقع در طبقه زیرزمین اول به عنوان نقطه شروع و تقاطع نزدیک آشپزخانه NS در طبقه ششم به عنوان مقصد انتخاب شد. با اشاره به نتایج، از آنجایی که نزدیکترین آسانسور به مقصد فقط از طبقه اول تا ششم حرکت می کند، مسیر بهینه برای افراد دارای معلولیت حرکتی انتقال به آن آسانسور پس از حرکت از زیرزمین به طبقه اول از طریق آسانسور دیگری است. در مقابل، مسیر بهینه برای عابران پیاده عادی از طریق ترانزیت بین پله برقی از طبقه اول به طبقه پنجم و پنجم تا ششم محاسبه شد. به عنوان نمونه دیگری از ناوبری چند طبقه، ما به طور تصادفی نقطه شروع در طبقه اول، مقصد در طبقه ششم و توقف در طبقه سوم و چهارم را انتخاب کردیم.شکل 9 ب. از آنجایی که هم عابران پیاده عادی و هم افراد دارای معلولیت حرکتی با استفاده از آسانسور به صورت عمودی حرکت می کردند، مسیرها از طبقه سوم تا مقصد یکسان بود. با این حال، تنها در مسیر برای عابران پیاده معمولی، ترانزیشن هایی که از پله برقی سریع در طبقه سوم استفاده می کنند نیز گنجانده شده است. این برای کاهش زمان سفر عمودی است و به این دلیل است که افراد دارای معلولیت حرکتی نمی توانند بدون هیچ وسیله کمکی از پله برقی استفاده کنند. این نشان میدهد که یک پلهافکن PWDE در صورتی که معیارهای قابل دسترس بودن را برآورده نکند، به عنوان یک فضای انتقال غیرقابل دسترسی عمل میکند.
جدول 5 مسافت خط مستقیم و طول تخمینی سفر بین نقطه شروع و مقصد را برای دو مثال در مورد 2 نشان می دهد. مسافت های سفر متفاوت بودند زیرا مسیر PWD فضاها و امکانات غیرقابل دسترس را دور می زد. مسیر PWD در مقایسه با مسیر برای عابران عادی نسبتا طولانی بود، زیرا عابران پیاده می توانند به صورت عمودی با استفاده از پله برقی حرکت کنند، در حالی که افراد دارای معلولیت حرکتی باید بین طبقات با استفاده از آسانسور جابجا شوند. در جدول 5ب، از آنجایی که مسیرهای یکسانی برای انتقال از طبقه سوم به مقصد محاسبه شد، این مسیرها تفاوت نسبتا کمی در طول سفر تخمینی داشتند. همانطور که در مورد 1، این مورد نیز تایید کرد که مسیر به دست آمده توسط مدل پیشنهادی به درستی اطلاعات دسترسی PWD را منعکس میکند و بنابراین میتواند اطلاعات معنیداری را برای برنامهریزی مسیر PWD برای حرکت افقی و عمودی ارائه دهد.
5. نتیجه گیری ها
با افزایش پیچیدگی فضاهای داخلی، چالش مرتبط با تحرک PWD به یک موضوع اجتماعی مهم تبدیل شده است، و خدماتی مانند ناوبری شخصی شده در فضای داخلی نیازمند مدل های داخلی است که شامل اطلاعات کافی از موانع باشد، ترجیحاً با یک مدل داده استاندارد شده که می تواند برای انواع مختلف استفاده شود. از خدمات
بنابراین، این مطالعه برای تولید یک مدل دادهای انجام شد که از حرکت افراد دارای معلولیت حرکتی در محیطهای داخلی پشتیبانی میکند. برای این منظور، ما یک مدل داده گسترده ایجاد کردیم که بر تحرک PWD تمرکز دارد. با بررسی استانداردهای طراحی برای ساختمانهای قابل دسترسی PWD، عواملی که بر حرکت افراد دارای معلولیت حرکتی تأثیر میگذارند از عناصر مختلف معماری و امکانات داخلی استخراج شده و به ویژگیها و ویژگیهای توسعه IndoorGML تغییر ساختار دادهاند. سپس برنامه افزودنی به هسته IndoorGML و ماژول های ناوبری متصل شد. از آنجایی که مدل داده پیشنهادی بر اساس IndoorGML، استانداردی برای فضاهای داخلی است، انتظار میرود که برای استاندارد شدن مناسب باشد.
سپس از مدل پیشنهادی برای تولید دادههای فضایی داخلی چند طبقه برای یک مرکز خرید بزرگ در کره استفاده کردیم. الگوریتم Dijkstra برای مسیریابی برای عابران پیاده عمومی و افراد دارای معلولیت حرکتی در دو سناریو استفاده شد: سفر در یک طبقه و سفر چند طبقه. نتایج مسیریابی تأیید کرد که پایگاه جغرافیایی ساخته شده با استفاده از مدل داده توسعهیافته، نه تنها محیط داخلی را برای افراد دارای معلولیت حرکتی به اندازه کافی توصیف میکند، بلکه حاوی اطلاعات کافی در مورد بسیاری از موانع ترافیکی است.
از آنجایی که این مدل بر افراد دارای ناتوانی حرکتی تمرکز دارد، لازم است مدل را به گونهای گسترش دهیم که ویژگیهای مرتبط با انواع دیگر معلولیتها، مانند اختلالات بینایی و شناختی را در بر گیرد، اگر این مدل در زمینه وسیعتری مورد استفاده قرار گیرد. علاوه بر این، با بررسی استانداردها و مقررات مربوطه، با این فرض که این موارد دقیقاً نظرات کاربران واقعی را منعکس میکنند، ویژگیها و عوامل قابل توجهی از اختلالات حرکتی را استخراج کردیم. با این حال، بازخورد افراد دارای معلولیت حرکتی باید در نظر گرفته شود زیرا مشارکت فعال آنها به بهبود مدل داده پیشنهادی کمک می کند.
مدل داده پیشنهادی ایجاد یک مدل داخلی مناسب برای برنامه ریزی مسیر PWD را امکان پذیر می کند. علاوه بر این، مجموعه داده تولید شده را می توان به راحتی در بین سرویس های مختلف با اهداف مشابه به اشتراک گذاشت. برای افزایش سودمندی مدل داده ایجاد شده در نتیجه این مطالعه، ما یک روش برای ساخت خودکار یک مدل داخلی PWD با استفاده از دادههای منبع مختلف توسعه خواهیم داد. علاوه بر این، در تحقیقات آتی، امکان توسعه یک الگوریتم ناوبری که برای داده های ساخته شده با استفاده از مدل پیشنهادی قابل اجرا باشد تا منعکس کننده نیازهای شخصی افراد دارای معلولیت حرکتی باشد، وجود خواهد داشت.
منابع
- لی، کی جی. لی، JY مفاهیم اساسی استاندارد نامزد اطلاعات فضایی داخلی IndoorGML و کاربردهای آن. جی کره اسپات. Inf. Soc. 2013 ، 21 ، 1-10. [ Google Scholar ]
- کانگ، هنگ کنگ؛ Li، KJ یک مدل استاندارد داده فضایی داخلی – OGC IndoorGML و رویکردهای پیاده سازی. ISPRS Int. J. GeoInf. 2017 ، 6 ، 116. [ Google Scholar ] [ CrossRef ]
- افغانتولویی، ع. مصطفوی، کارشناسی ارشد به سمت استقرار بهینه شبکه حسگر در محیط داخلی سه بعدی برای تحرک افراد دارای معلولیت. در مجموعه مقالات دهمین کنفرانس بین المللی علوم اطلاعات جغرافیایی، ملبورن، استرالیا، 28 تا 31 اوت 2018. [ Google Scholar ]
- ایسیکداغ، یو. زلاتانوا، اس. Underwood، J. یک مدل مبتنی بر BIM برای پشتیبانی از الزامات ناوبری داخلی. محاسبه کنید. محیط زیست سیستم شهری 2013 ، 41 ، 112-123. [ Google Scholar ] [ CrossRef ]
- آیدا، اچ. هیروی، ک. کاجی، ک. Kawaguchi، N. پیشنهادی از مدل داده توسعه یافته IndoorGML برای سیستم ناوبری صوتی عابر پیاده. در مجموعه مقالات هفتمین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی، دالاس، تگزاس، ایالات متحده آمریکا، 4 تا 7 نوامبر 2014. [ Google Scholar ]
- گوندوز، م. ایسیکداغ، یو. Basaraner, M. مروری بر تحقیقات اخیر در مدل سازی و نقشه برداری داخلی. طاق ISPRS. 2016 ، 41 ، 289. [ Google Scholar ]
- لی، دبلیو. هو، دی. Lin, Z. مدل ابعادی فضای داخلی که از مسیریابی بدون مانع پشتیبانی می کند. در مجموعه مقالات موقعیت یابی همه جا حاضر، ناوبری داخلی و خدمات مبتنی بر مکان، ووهان، چین، 22 تا 23 مارس 2018 در سال 2018. [ Google Scholar ]
- ماهشواری، ن. سریواستاوا، اس. راجان، KS توسعه یک مدل معنایی فضای داخلی و اجرای آن به عنوان یک توسعه IndoorGML. ISPRS Int. J. GeoInf. 2019 ، 8 ، 333. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کیم، ی. کانگ، اچ. Lee, J. توسعه ADE داخلی CityGML برای مدیریت امکانات داخلی. در نوآوری در علوم ژئو اطلاعات سه بعدی ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2014; ص 243-265. [ Google Scholar ]
- سریواستاوا، اس. ماهشواری، ن. Rajan, K. به سوی تولید داده های IndoorGML غنی از نظر معنایی از نقشه های معماری. طاق ISPRS. 2018 ، 42 ، 4. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- یونگ، اچ. لی، جی. توسعه یک مدل داده مبتنی بر تصویر همه جانبه از طریق گسترش مفهوم IndoorGML به یک سرویس گشت داخلی. J. Sens. 2017 . [ Google Scholar ] [ CrossRef ]
- لین، ز. خو، ز. هو، دی. هو، کیو. Li، W. مدل داده های مکانی ترکیبی برای فضای داخلی: توپولوژی و شبکه ترکیبی. ISPRS Int. J. GeoInf. 2017 ، 6 ، 343. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- آلاتاس، ا. زلاتانوا، اس. ون اوستروم، پی. Li، KJ مدل مفهومی بهبود یافته و کامل تر برای بازبینی IndoorGML. در مجموعه مقالات دهمین کنفرانس بین المللی علوم اطلاعات جغرافیایی، ملبورن، استرالیا، 28 تا 31 اوت 2018. [ Google Scholar ]
- میروهابی، س. عباسپور، RA استخراج خودکار مدل هسته IndoorGML از OpenStreetMap. طاق ISPRS. 2015 ، 40 ، 459. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- آتیلا، یو. کاراس، آی. توران، م. رحمان، ع. تولید خودکار شبکه های سه بعدی در CityGML و طراحی یک مدل تخلیه فردی هوشمند برای آتش سوزی ساختمان در محدوده GIS سه بعدی. در نوآوری در علوم ژئو اطلاعات سه بعدی ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2014; صص 123-142. [ Google Scholar ]
- آلاتاس، ا. ون اوستروم، پی. زلاتانوا، اس. هونولد، دی. Verbree, E. استفاده از مدل ترکیبی ladm-indoorgml برای پشتیبانی از تخلیه ساختمان. طاق ISPRS. 2018 ، 42 ، 4. [ Google Scholar ]
- لیو، ال. زلاتانوا، اس. زو، س. Li, K. به سوی ادغام IndoorGML و IndoorlocationGML برای برنامه های داخلی. ISPRS Ann. 2017 ، 4 ، 343. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیو، ال. زلاتانوا، اس. یک مدل داده معنایی برای ناوبری داخلی. در مجموعه مقالات چهارمین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 6 نوامبر 2012. [ Google Scholar ]
- کوستیچ، ن. Scheider, S. تولید خودکار اطلاعات دسترسی در فضای داخلی برای افراد دارای اختلال حرکتی. در AGILE 2015 ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2015. [ Google Scholar ]
- کریمی، ح. غفوریان، م. مسیریابی داخلی برای افراد با نیازها و ترجیحات خاص. ترانس. GIS 2010 ، 14 ، 299-329. [ Google Scholar ] [ CrossRef ]
- وزارت دادگستری. 2010 استانداردهای ADA برای طراحی قابل دسترس ; دفتر چاپ دولت ایالات متحده: واشنگتن، دی سی، ایالات متحده آمریکا، 2010.
- هاشمی، م. کریمی، مدل فضایی سرپوشیده HA و شاخص دسترسی برای تخلیه اضطراری افراد دارای معلولیت. جی. کامپیوتر. مدنی مهندس 2015 ، 30 ، 04015056. [ Google Scholar ] [ CrossRef ]
- هاشمی، م. دینامیک، متعادل کننده جریان، به حداقل رساندن مسیر، راهیابی در دسترس برای تخلیه اضطراری افرادی که از ویلچر استفاده می کنند. فناوری آتش نشانی 2018 ، 54 ، 1195-1217. [ Google Scholar ] [ CrossRef ]
- شین، جی. لی، JK شاخص راه رفتن داخلی: رویکرد فعال BIM برای تعیین کمیت گردش ساختمان. خودکار ساخت و ساز 2019 ، 106 ، 102845. [ Google Scholar ] [ CrossRef ]
- وانگ، ز. Niu, L. یک مدل داده برای استفاده از OpenStreetMap برای ادغام برنامه ریزی مسیرهای داخلی و خارجی. Sensors 2018 , 18 , 2100. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- مگالینگام، RK; راجندران، AP; دیلیپ کومار، دی. Soloman، AT LARN: ناوبری داخلی برای افراد مسن و دارای مشکلات جسمی. در مجموعه مقالات کنفرانس فناوری بشردوستانه جهانی IEEE، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 20 تا 23 اکتبر 2013. [ Google Scholar ]
- فلینر، آر. ساسز، بی. سیمون-ناگی، جی. Micsik، A. ناوبری داخلی برای افراد ناتوان حرکتی در امکانات پزشکی. Acta Polytech. آویزان شد. 2017 ، 14 ، 111-128. [ Google Scholar ]
- لیو، ال. زلاتانوا، اس. رویکردی برای محاسبه مسیر داخلی در میان موانعی که بعد کاربر را در نظر می گیرد. ISPRS Int. J. GeoInf. 2015 ، 4 ، 2821-2841. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خو، ام. وی، اس. زلاتانوا، اس. رویکرد ناوبری داخلی با در نظر گرفتن موانع و تقسیم فضایی طرح دوبعدی. طاق ISPRS. 2016 ، 41 ، 339. [ Google Scholar ]
- خو، ام. وی، اس. زلاتانوا، اس. Zhang, R. برنامه ریزی مسیر داخلی مبتنی بر BIM با در نظر گرفتن موانع. ISPRS Ann. 2017 ، 4 . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، کی جی. لی، جی. زلاتانوا، اس. کلبه، تی. ناگل، سی. Becker، T. OGC IndoorGML، نسخه 1.0.3 . کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2016; در دسترس آنلاین: https://docs.opengeospatial.org/is/14-005r5/14-005r5.html (در 29 آوریل 2019 قابل دسترسی است).
- لی، کی جی. کونتی، جی. کنستانتینیدیس، ای. زلاتانوا، اس. بامیدیس، P. OGC IndoorGML: یک رویکرد استاندارد برای نقشه های داخلی. در داده های جغرافیایی و اثرانگشتی برای ایجاد سیستم هایی برای موقعیت یابی داخلی و ناوبری داخلی/خارجی ؛ الزویر: آمستردام، هلند، 2019. [ Google Scholar ]
- ناگل، سی. بکر، تی. کادن، آر. لی، ک. لی، جی. Kolbe، الزامات TH و مدلسازی فضایی رویداد برای ناوبری داخلی ؛ کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2010; در دسترس آنلاین: https://mediatum.ub.tum.de/doc/1155642/737344.pdf (در 19 ژانویه 2020 قابل دسترسی است).
- وزارت بهداشت و رفاه. آیین نامه صدور گواهینامه محیط زندگی بدون مانع. در دسترس آنلاین: https://bf.koddi.or.kr/ (در 22 نوامبر 2019 قابل دسترسی است).
- بویس، KE; شیلدز، تی جی. Silcock، GWH به سمت توصیف اشغال ساختمان برای مهندسی ایمنی آتش نشانی: قابلیت های افراد معلول که به صورت افقی و در شیب حرکت می کنند. فناوری آتش نشانی 1999 ، 35 ، 51-67. [ Google Scholar ] [ CrossRef ]
- Averill, JD; طاووس، RD; Kuligowski، ED تجزیه و تحلیل تخلیه برج های مرکز تجارت جهانی در 11 سپتامبر 2001. Fire Technol. 2013 ، 49 ، 37-63. [ Google Scholar ] [ CrossRef ]
- جیانگ، CS; ژنگ، اس.زی. یوان، اف. جیا، HJ; Zhan، ZN; وانگ، جی جی ارزیابی تجربی در مورد قابلیتهای حرکتی معلولان ناتوان حرکتی. Saf. علمی 2012 ، 50 ، 974-985. [ Google Scholar ] [ CrossRef ]
- دامن، دبلیو. Hoogendoorn, S. ظرفیت درب ها در شرایط تخلیه. Procedia Eng. 2010 ، 3 ، 53-66. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]

شکل 1. تفاسیر مختلف از فضای داخلی (دایره های آبی، خطوط قرمز و مربع های نارنجی به ترتیب نشان دهنده حالت ها، انتقال ها و ورودی ها) از دیدگاه یک عابر پیاده ( سمت چپ ) و کاربر ویلچر ( راست ) [ 33 ].
شکل 2. تعریف ویژگی های فضای قابل پیمایش برای PWD. PWD: افراد دارای معلولیت.
شکل 3. تعریف ویژگی های نصب داخلی برای PWD. PWD: افراد دارای معلولیت.
شکل 4. تعریف ویژگی های Opening Boundaries برای PWD. PWD: افراد دارای معلولیت.
شکل 5. نمودار UML پسوند مدل PWD (“*” به “بسیاری” اشاره دارد). UML: زبان مدل سازی یکپارچه. PWD: افراد دارای معلولیت.
شکل 6. داده های تولید شده برای مرکز خرید Lotte World.
شکل 7. قابلیت دسترسی به عناصر در مرکز خرید Lotte World.
شکل 8. چیدمان در B1: ( الف ) محل توالت ها و ورودی های اصلی. ( ب ، ج ) مسیریابی برای ( ب ) عابران پیاده عادی و ( ج ) افراد دارای معلولیت حرکتی.
شکل 9. نتایج مسیریابی: ( الف ) از B1 تا F6. ( ب ) از F1 تا F6 با دو توقف.


بدون دیدگاه