1. مقدمه
با ادغام مداوم فناوری اطلاعات و حالتهای کاری سنتی، استفاده از وسایل نقلیه هوایی بدون سرنشین (پهپاد) در مدیریت اضطراری شهری توجه بیشتری را به خود جلب کرده است. این پهپاد می تواند به عنوان یک پلت فرم حسگر متحرک برای تحقق تعامل اطلاعات بین هوا و زمین مورد استفاده قرار گیرد. این پهپاد می تواند یک صحنه را در زمان واقعی نظارت کند و اطلاعات داده ها را به مدیران اورژانس منتقل کند. این به مدیران اورژانس کمک می کند تا وضعیت را در محل به درستی بدانند، جان افراد را نجات دهند و بحران را به موقع کنترل کنند. در حال حاضر اکثر مطالعات روی مدل های کانال هوا به زمین بر روی یک مدل تک کاناله بدون در نظر گرفتن ارتفاع پهپاد متمرکز شده است. با این حال، در یک محیط شهری پیچیده، تراکم توزیع و مکان پراکنده های پیچیده مانند ساختمان ها و درختان با ارتفاع متفاوت است. آنها باعث می شوند که سیگنال هنگام ارسال در ارتفاعات مختلف، از دست دادن و تضعیف متفاوتی را تجربه کند. بنابراین، در واقع تفاوت های زیادی در ویژگی های کانال در ارتفاع های مختلف وجود دارد. در این مورد، مدل تک کانال دارای محدودیت هایی است، به ویژه در مدیریت اضطراری، که در آن قابلیت اطمینان ارتباطات بسیار مورد نیاز است. استفاده از مدل تک کانالی اطلاعات را در حین انتقال ناپایدار می کند که باعث ایجاد مشکلات متعددی مانند تداخل و از دست دادن بسته می شود. بنابراین، ایجاد یک مدل کانال تطبیقی و دقیق تر در یک محیط شهری برای اطمینان از قابلیت اطمینان انتقال اطلاعات در شرایط اضطراری بسیار ضروری است. در نتیجه تاثیر و آسیب ناشی از شرایط اضطراری بر افراد و جامعه کاهش می یابد. بنابراین، در واقع تفاوت های زیادی در ویژگی های کانال در ارتفاع های مختلف وجود دارد. در این مورد، مدل تک کانال دارای محدودیت هایی است، به ویژه در مدیریت اضطراری، که در آن قابلیت اطمینان ارتباطات بسیار مورد نیاز است. استفاده از مدل تک کانالی اطلاعات را در حین انتقال ناپایدار می کند که باعث ایجاد مشکلات متعددی مانند تداخل و از دست دادن بسته می شود. بنابراین، ایجاد یک مدل کانال تطبیقی و دقیق تر در یک محیط شهری برای اطمینان از قابلیت اطمینان انتقال اطلاعات در شرایط اضطراری بسیار ضروری است. در نتیجه تاثیر و آسیب ناشی از شرایط اضطراری بر افراد و جامعه کاهش می یابد. بنابراین، در واقع تفاوت های زیادی در ویژگی های کانال در ارتفاع های مختلف وجود دارد. در این مورد، مدل تک کانال دارای محدودیت هایی است، به ویژه در مدیریت اضطراری، که در آن قابلیت اطمینان ارتباطات بسیار مورد نیاز است. استفاده از مدل تک کانالی اطلاعات را در حین انتقال ناپایدار می کند که باعث ایجاد مشکلات متعددی مانند تداخل و از دست دادن بسته می شود. بنابراین، ایجاد یک مدل کانال تطبیقی و دقیق تر در یک محیط شهری برای اطمینان از قابلیت اطمینان انتقال اطلاعات در شرایط اضطراری بسیار ضروری است. در نتیجه تاثیر و آسیب ناشی از شرایط اضطراری بر افراد و جامعه کاهش می یابد. مدل تک کانال دارای محدودیت هایی است، به ویژه در مدیریت اضطراری، که در آن قابلیت اطمینان ارتباطات بسیار مورد نیاز است. استفاده از مدل تک کانالی اطلاعات را در حین انتقال ناپایدار می کند که باعث ایجاد مشکلات متعددی مانند تداخل و از دست دادن بسته می شود. بنابراین، ایجاد یک مدل کانال تطبیقی و دقیق تر در یک محیط شهری برای اطمینان از قابلیت اطمینان انتقال اطلاعات در شرایط اضطراری بسیار ضروری است. در نتیجه تاثیر و آسیب ناشی از شرایط اضطراری بر افراد و جامعه کاهش می یابد. مدل تک کانال دارای محدودیت هایی است، به ویژه در مدیریت اضطراری، که در آن قابلیت اطمینان ارتباطات بسیار مورد نیاز است. استفاده از مدل تک کانالی اطلاعات را در حین انتقال ناپایدار می کند که باعث ایجاد مشکلات متعددی مانند تداخل و از دست دادن بسته می شود. بنابراین، ایجاد یک مدل کانال تطبیقی و دقیق تر در یک محیط شهری برای اطمینان از قابلیت اطمینان انتقال اطلاعات در شرایط اضطراری بسیار ضروری است. در نتیجه تاثیر و آسیب ناشی از شرایط اضطراری بر افراد و جامعه کاهش می یابد. بنابراین، ایجاد یک مدل کانال تطبیقی و دقیق تر در یک محیط شهری برای اطمینان از قابلیت اطمینان انتقال اطلاعات در شرایط اضطراری بسیار ضروری است. در نتیجه تاثیر و آسیب ناشی از شرایط اضطراری بر افراد و جامعه کاهش می یابد. بنابراین، ایجاد یک مدل کانال تطبیقی و دقیق تر در یک محیط شهری برای اطمینان از قابلیت اطمینان انتقال اطلاعات در شرایط اضطراری بسیار ضروری است. در نتیجه تاثیر و آسیب ناشی از شرایط اضطراری بر افراد و جامعه کاهش می یابد.
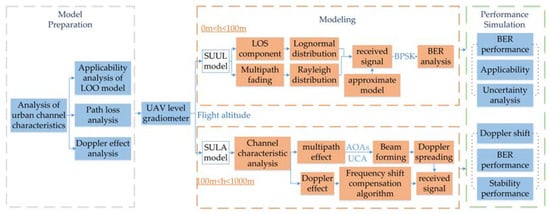
در نتیجه، ما پیشنهاد میکنیم که منطقه ارتباطی پهپاد را به دو بخش تقسیم کنیم: ارتفاع فوقالعاده کم (0~100 متر) و ارتفاع کم (100~1000 متر). ابتدا، ویژگیهای کانال شهری تحلیل میشوند. تجزیه و تحلیل ویژگی های کانال شهری در شکل 1 نشان داده شده است. در منطقه با ارتفاع بسیار کم، انعکاس، شکست و پراکندگی ناشی از انواع پراکنده های پیچیده در طول انتقال سیگنال توسط مدل کانال SUUL در نظر گرفته می شود. این مدل بر روی محو شدن سایه و محو شدن چند مسیره تمرکز دارد. علاوه بر این، تابع چگالی احتمال پارامترهای مرتبط و نرخ خطای بیت بر اساس مدل بهبود یافته LOO مشتق شدهاند. در منطقه کم ارتفاع، با افزایش ارتفاع پرواز پهپاد، تأثیر محو شدن سایه در کانال به تدریج کاهش می یابد. گسترش شیفت فرکانس داپلر ناشی از سرعت پرواز پهپاد منجر به محو شدن شدید کانال می شود. در نتیجه، مدل کانال SULA ارائه شده در این مقاله از فناوری شکل دهی پرتو آرایه دایره ای یکنواخت برای طراحی الگوریتم جبران تغییر فرکانس داپلر استفاده می کند. سرانجام، پهپاد مدل کانال را به صورت تطبیقی با توجه به ارتفاع تنظیم می کند. قابلیت اطمینان ارتباطات پهپاد تضمین شده و دامنه نظارت موثر پهپادها نیز بهبود یافته است.
2. کارهای مرتبط
روشهای مدلسازی کانال بیسیم سنتی عمدتاً به روشهای مدلسازی قطعی و روشهای مدلسازی آماری تقسیم میشوند. مدلسازی کانال قطعی مکانیسم محو شدن سیگنالهای دریافتی را بر اساس تئوری انتقال امواج الکترومغناطیسی تحلیل میکند. معادلات ماکسول، پراکنده ها، توپوگرافی محیطی و سایر اطلاعات توسط این روش اتخاذ می شوند. در [ 1 ]، فنگ و همکاران. مدلهای افت مسیر و سایه از دادههای انتشار شبیهسازی شده استخراجشده از مدلهای ردیابی پرتو قطعی در فضای باز. بر اساس پارامترهای آماری محیط شهری در منطقه هدف، الحورانی و همکاران. یک مدل انتشار فرکانس رادیویی پیشنهاد کرد که افت مسیر بین سکوی ارتفاع پایین و گیرنده زمینی را پیشبینی میکرد [ 2 ]]. با این حال، دقت روش مدلسازی قطعی به پایگاه داده محیط مدلسازی بستگی دارد و به محاسبات پیچیده زیادی نیاز دارد. بنابراین این روش مدل سازی دارای محدودیت های خاصی در سناریوی کاربردی مدیریت اضطراری است. علاوه بر این، تغییر فرکانس داپلر ناشی از حرکت پرسرعت پهپاد در فرآیند ساخت مدل فوق در نظر گرفته نشد.
روشهای مدلسازی آماری را میتوان به مدلسازی پاسخ ضربه کانال و مدلسازی کانال تصادفی تقسیم کرد. مدلسازی پاسخ ضربه کانال از تجهیزات اندازهگیری برای اندازهگیری و ذخیره پاسخ ضربه کانال در زمان واقعی استفاده میکند. داده های ذخیره شده را می توان مجددا استفاده کرد و یک مدل ریاضی ساده را می توان بر اساس داده های اندازه گیری شده ایجاد کرد. مدلهایی که با این روش ایجاد میشوند، بیشتر مدلهای خط تاخیری هستند. به عنوان مثال، زمان و همکاران. از یک مدل فیلتر خط تاخیر ضربه خورده با ضرایب متغیر زمان برای مدلسازی کانال استفاده کرد [ 3]. فرض بر این است که تضعیف دامنه مولفه NLOS از توزیع رایلی تبعیت می کند و محو شدن چند مسیره از توزیع گاوسی تبعیت می کند. به همین ترتیب، تابع چگالی احتمال توسط مدلسازی کانال تصادفی برای توصیف پارامترهای محو شدن کانال استفاده میشود و سپس پارامترهای مربوطه برای ایجاد یک مدل کانال از یک محیط ارتباطی مشابه اتخاذ میشوند. مدل کانال تصادفی کلاسیک شامل مدل کانال محو شدن ریلی [ 4 ]، مدل محو شدن برنج [ 5 ]، مدل محو شدن لگن نرمال [ 6 ]، مدل سوزوکی [ 7 ] و مدل کلارک [ 8 ] و سایر مدل های کلاسیک است. علاوه بر این، مدل تصادفی برای تجزیه و تحلیل ویژگیهای متغیر با زمان کانالهای پهپاد مفید است [9 ]. روش مدل سازی کانال تصادفی برای طراحی انواع سیستم های ارتباطی بی سیم مناسب است. تئوری آماری با این روش برای ایجاد یک مدل کانال معقول اتخاذ میشود و معنای فیزیکی آن نسبتاً شهودی است. بنابراین، با توجه به ویژگیهای کانال و پیچیدگی مدلسازی محیط شهری پیچیده، روش مدلسازی کانال تصادفی برای تحقیق پیگیری انتخاب میشود.
علاوه بر این، در تحقیقات گذشته در مورد مدلهای کانال، تحقیقات روی ارتباطات معمولی زمین به زمین بسیار بالغ بوده است. کاتن مدل محو شدن سایه را پیشنهاد کرد [ 10 ]. آمار سیگنال دریافتی با خوشه بندی اجزای چند مسیری نشان داده می شود. با این حال، ویژگی های کانال کانال هوا به زمین با کانال ارتباطی زمینی متفاوت است. در مقایسه با ارتباطات زمینی، پهپادها در یک محیط بی سیم پیچیده و قابل تغییر قرار دارند و نیازهای BER آنها بسیار بیشتر از کانال های بی سیم سنتی زمینی است. مطالعه تغییر فرکانس داپلر که یک پارامتر کلیدی است به دلیل مانورپذیری بالای پهپادها باید به محاسبه پارامترهای کانال اضافه شود.
از سوی دیگر محققان بهبودهایی را برای مدل کلاسیک LOO پیشنهاد کرده اند [ 11 ]. سیمونک و همکاران بر روی کانال های ارتفاع پایین در مناطق شهری بر اساس مدل LOO تحقیق کرد و همچنین یک ژنراتور سری زمانی باند باریک را توسعه داد [ 12 ]. اما در این مطالعه به جایگاه مهم قابلیت اطمینان ارتباط در عملکرد کانال توجهی نشده است. علاوه بر این، در مطالعات فوق از مدل تک کانالی برای مشخص کردن کانال استفاده شده است. در واقع در یک محیط پیچیده شهری به دلیل ارتفاع متفاوت پراکنده ها مانند ساختمان ها و درختان و تغییر در موقعیت توزیع آنها، ویژگی های کانال در ارتفاعات مختلف متفاوت است. مدل تک کاناله در این مورد از قابلیت اطمینان ارتباطی کافی برخوردار نیست.
به همین ترتیب، برخی از محققان نیز یک مدل کانال تطبیقی سلسله مراتبی را پیشنهاد کردند. یانگ و همکاران یک کانال تطبیقی بر اساس مدل بهبود یافته LOO و مدل رایس پیشنهاد کرد [ 13]، که در آن مؤلفه LOS از توزیع لگ نرمال و مؤلفه چند مسیری از توزیع ریلی تبعیت می کند. آنتن های جهت دار برای ارتباط توسط مدل بهبود یافته رایس استفاده شد. این مقاله با موفقیت درجات آزادی این دو مدل را گسترش داد. با این حال، قابلیت اطمینان ارتباطات به طور کامل مورد بحث قرار نگرفته است. علاوه بر این، آنتن های جهت دار در محیط های با تحرک بالا عملکرد ضعیفی دارند. آنتن همه جانبه از مزایای پوشش دهی زیاد، قیمت پایین و عملکرد بهتر در سناریوهای تحرک بالا برخوردار است. بنابراین در محیط مدیریت اضطراری شهری پهپادها با توجه به استفاده از آنتن های همه جهته عملکرد بهتری خواهند داشت.
بر اساس بحث تحقیق فوق، یک مدل کانال تطبیقی SUUL-SULA در این مقاله پیشنهاد شده است. ویژگی های کانال با دقت بیشتری از طریق این مدل توصیف می شود. پهپادها می توانند کانال های بهتری را با توجه به ارتفاعات پروازی مختلف انتخاب کنند تا قابلیت اطمینان ارتباطات را تا حد زیادی بهبود بخشند. عملکرد بهتری را در مدیریت اورژانس شهری نشان می دهد. نقشه راه خاص تحقیق در شکل 2 نشان داده شده است .
مشارکت های اصلی این مقاله به شرح زیر است:
- (1)
-
یک کانال هوا به زمین تطبیقی مبتنی بر ارتفاع بر اساس ویژگی های کانال ارتفاعات مختلف در محیط شهری برای بهبود قابلیت اطمینان کانال پیشنهاد شده است.
- (2)
-
در منطقه بسیار کم ارتفاع، روش BPSK برای مدلسازی کانال ارتباطی با ارتفاع فوق العاده پایین پهپاد با اشاره به مدل LOO اتخاذ شده است. در منطقه کم ارتفاع، جداسازی و جبران تغییر فرکانس داپلر با استفاده از فناوری شکلدهی پرتو و ویژگیهای چند مسیری مورد تاکید قرار میگیرد.
- (3)
-
آزمایش شبیه سازی ثابت می کند که این مدل می تواند به طور موثر نرخ خطای بیت ارتباط را کاهش دهد و قابلیت اطمینان ارتباطات را بهبود بخشد. این پشتیبانی از سطح فیزیکی موثر برای استفاده از پهپاد در مدیریت اضطراری شهر هوشمند را فراهم می کند.
3. تجزیه و تحلیل کانال
در یک محیط پیچیده شهری، تراکم توزیع ساختمان ها و پوشش گیاهی با ارتفاع متفاوت است. این منجر به عوامل اصلی مختلفی برای محو شدن سیگنال در ارتفاعات مختلف می شود و ویژگی های کانال پیچیده تر و قابل تغییر هستند. ویژگی های محو شدن کانال های ارتباطی بی سیم نیز تصادفی زیادی دارند. امواج رادیویی علاوه بر تابش مستقیم، زمانی که امواج رادیویی با موانعی برخورد می کنند، بر اساس طول موج خود و اندازه مانع بازتاب، پراش و پراکنده خواهند شد. این منجر به مقدار مشخصی از دست دادن انرژی امواج رادیویی می شود و باعث محو شدن سیگنال می شود. این بخش یک نمای کلی از مدل محو شدن مورد استفاده ارائه می دهد.
3.1. مدل لو
در سال 1985، Loo به اصطلاح مدل Loo را برای کانال آماری پیوند ماهوارهای سیار زمینی پیشنهاد کرد [ 14 ]. مدل فرض می کند که سیگنال دریافتی از یک جزء LOS و یک جزء چند مسیره تشکیل شده است. مؤلفه LOS از توزیع Lognormal و مؤلفه چند مسیری از توزیع Rayleigh پیروی می کند. یعنی سیگنال دریافتی به صورت زیر است:
جایی که z(تی)جزء LOS است، س(تی)سایه محو می شود و د(تی)جزء چند مسیره است.
با فرض ثابت ماندن دامنه z مولفه LOS، پوشش سیگنال دریافتی r از توزیع برنج تبعیت می کند:
جایی که λ02میانگین توان چند مسیره پراکنده است، من0(⋅)اولین نوع از تابع بسل اصلاح شده مرتبه صفر است.
z(تی)از توزیع Lognormal تبعیت می کند:
جایی که μمیانگین انحراف است لوگاریتمz، د0واریانس است لوگاریتمz.
با توجه به فرمول احتمال کل، توزیع احتمال سیگنال دریافتی در رابطه (4) نشان داده شده است:
زمانی که دامنه سیگنال بسیار بزرگتر از λ0، f(r)از توزیع Lognormal تبعیت می کند:
هنگامی که دامنه سیگنال بسیار کوچکتر از λ0، f(r)از توزیع ریلی تبعیت می کند:
تابع توزیع احتمال تجمعی باقیمانده از rاست:
جایی که R یک مقدار مشخص است.
مدل Loo از یک هلیکوپتر برای شبیه سازی ماهواره ها استفاده کرد و با زاویه ارتفاع 15 درجه نسبت به گیرنده در مناطق سایه روشن و سایه های سنگین که پوشش درخت حدود 35 درصد بود پرواز کرد. پارامترهای مدل در جدول 1 نشان داده شده است [ 15 ].
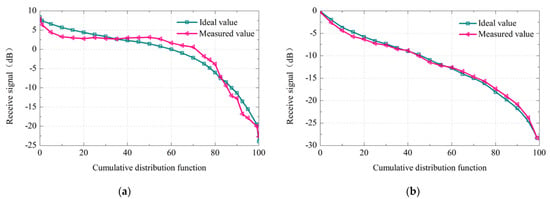
شکل 3 نمودار برازش منحنی توزیع تجمعی داده های نظری و داده های اندازه گیری شده است. شکل 3 a منحنی توزیع تجمعی داده های نظری مدل Loo و داده های اندازه گیری شده تحت سایه روشن است، در حالی که شکل 3 b منحنی توزیع تجمعی را در شرایط سایه سنگین نشان می دهد.
در شکل 3 می توان مشاهده کرد که پوشش سیگنال دریافتی و جزء LOS تحت تأثیر سایه قرار می گیرند. علاوه بر این، با افزایش توزیع احتمال تجمعی، مقادیر نظری و اندازهگیری شده پوشش سیگنال دریافتی به صورت غیر خطی کاهش مییابد. در یک محیط سایه روشن، اثر برازش بین نتایج محاسبه و مقادیر اندازهگیری شده متوسط است. نتایج محاسبات نشان دهنده یک اثر سایه بالاتر است. در مقابل، این مدل در محیط های سایه سنگین اثر برازش بهتری دارد. علاوه بر این، مطالعات نشان داده است که سیستمهای ماهوارهای متحرک زمینی مشابه پیوندهای هوا به زمین پهپاد شهری هستند. با توجه به تجزیه و تحلیل داده های آماری و داده های اندازه گیری شده، مدل LOO نقطه شروع مناسبی برای بهبود مدل است.12 ]. بنابراین، مدل LOO برای مناطق شهری بسیار کم ارتفاع با محو شدن سایه های سنگین بهبود یافته است.
3.2. مدل از دست دادن مسیر در مقیاس بزرگ
محو شدن در مقیاس بزرگ با از دست دادن مسیر و محو شدن سایه نشان داده می شود. افت مسیر با افزایش فاصله ارتباطی افزایش می یابد. محو شدن سایه در طول از دست دادن مسیر متفاوت است. در مدیریت اضطراری محیط های پیچیده شهری، موانعی وجود دارد که باعث محو شدن سایه ها می شود، مانند ساختمان ها، درختان و غیره. هنگامی که انتهای گیرنده به ناحیه سایه دار حرکت می کند، قدرت سیگنال دریافتی کاهش می یابد. و موانع با چگالی و موقعیت توزیع متفاوت در مسیرهای انتقال مختلف توزیع می شوند. حتی اگر فاصله ارتباطی یکسان باشد، قدرت سیگنال دریافتی متفاوت است.
مدل انتشار فضای آزاد ساده ترین مدل از دست دادن مسیر است که برای پیش بینی قدرت سیگنال دریافتی در محیط ارتباط بی سیم استفاده می شود. قدرت سیگنال دریافتی را می توان با معادله فریس به صورت معادله (8) بیان کرد:
که در آن Pr توان سیگنال دریافتی، Pt قدرت سیگنال ارسال، Gt بهره آنتن ارسال، Gr بهره آنتن دریافت است، λطول موج است و λ = c / f را برآورده می کند ، d فاصله انتقال موج رادیویی است.
هنگامی که هیچ مانعی در مسیر انتشار وجود ندارد، به عنوان انتشار فضای آزاد تقریبی می شود. از دست دادن مسیر به صورت زیر بیان می شود:
که در آن f فرکانس انتقال سیگنال است.
مدل تلفات مسافت لگاریتمی با معرفی شاخص افت مسیر ایجاد می شود αکه مربوط به محیط زیست است مدل از دست دادن مسیر فاصله لگاریتمی به صورت زیر بیان می شود:
جایی که دrهfفاصله مرجع است، αشاخص از دست دادن مسیر است. شاخص های مختلف از دست دادن مسیر با محیط های مختلف مطابقت دارند.
به طور کلی، پLrهfنشان دهنده سود از دست دادن مسیر در فضای آزاد در فاصله است دrهf. چه زمانی جیتی=جیr=1، آنتن فرستنده گیرنده واحد بهره است و میانگین توان سیگنال دریافتی به صورت زیر بیان می شود:
از آنجایی که پهپاد در طول فرآیند ارتباط به حرکت خود ادامه می دهد، تعداد زیادی موانع مختلف در مسیرهای انتقال مختلف وجود دارد. حتی اگر فاصله ارتباطی بین فرستنده و گیرنده یکسان باشد، سیگنالهایی که در مسیرهای مختلف منتشر میشوند تلفات مسیر متفاوتی خواهند داشت. مدل سایه لگ نرمال با در نظر گرفتن مسائل عملی فوق معرفی شده است. مدل سایه لگ نرمال به صورت زیر بیان می شود:
جایی که ایکسیک متغیر تصادفی با توزیع گاوسی صفر است. واریانس از ایکساست σایکس2، به این معنا که، ایکس~ن(0،σایکس2). واریانس سایه را می توان در زمان واقعی بر اساس اندازه گیری های تجربی تخمین زد [ 16 ]. هنگامی که فاصله ارتباطی یکسان است، مدل می تواند اثر سایه واقعی را توصیف کند و می تواند خطای بین مقدار واقعی و مقدار تخمینی از دست دادن مسیر را کاهش دهد.
3.3. اثر داپلر
اثر داپلر می تواند ناشی از حرکت نسبی بین انتهای گیرنده و انتهای فرستنده یا حرکت اجسام در کانال باشد. تغییر کانال با زمان، یعنی ویژگی های متغیر با زمان کانال، اثر داپلر نامیده می شود. اگر گیرنده با سرعت از فرستنده دور شود v، فاصله لبین این دو همچنان افزایش خواهد یافت. سپس:
اگر جهت حرکت فرستنده با جهت انتشار موج سازگار باشد، اثر داپلر:
در غیر این صورت، اثر داپلر:
جایی که vcos(γ)جزء سرعت جهت انتشار موج است.
در ارتباطات سیار، اثر داپلر پارامتر اصلی است که سایر حالت های ارتباطی را متمایز می کند. محو شدن و تغییر داپلر باعث از بین رفتن تعداد زیادی بیت متوالی می شود. این منجر به افت قابل توجهی در عملکرد سیستم می شود که منجر به محو شدن انتخابی زمان کانال می شود.
4. مشارکت
تعداد زیادی پراکنده مانند ساختمان ها و درختان در یک محیط پیچیده شهری وجود دارد. این پراکنده ها چگالی توزیع متفاوتی در موقعیت های مختلف دارند. و با تغییر ارتفاع، تراکم پراکنده ها کاهش می یابد. در مدیریت اضطراری، زمانی که پهپاد با زمین در تعامل است، عملکرد کانال انتشار نقش مهمی در قابلیت اطمینان و پایداری ارتباطات دارد. با توجه به ویژگیهای کانال مختلف پهپادها در مناطق مختلف، این بخش پیشنهاد میکند کانال را به ارتفاع فوقالعاده کم (0~100 متر) و ارتفاع کم (100~1000 متر) برای مدلسازی تقسیم کند.
4.1. ساخت مدل SUUL برای محیط شهری بسیار کم ارتفاع
در ارتفاعات بسیار کم، تراکم توزیع پراکنده های پیچیده مانند ساختمان ها و پوشش گیاهی نسبتاً زیاد است. این پراکنده ها باعث ایجاد تداخل های مختلفی مانند انعکاس، پراکندگی و پراش در فرآیند ارتباطی پهپاد می شوند. در این حالت، عملکرد کانال عمدتاً تحت تأثیر محو شدن سایه و محو شدن چند مسیره است. در این بخش، مدل سایه لگ نرمال برای توصیف از دست دادن مسیر در حین انتقال سیگنال، و توزیع برنج برای توصیف محو شدن چند مسیره، به منظور ایجاد مدل کانال مناسب استفاده میشود.
4.1.1. تجزیه و تحلیل پاکت سیگنال دریافتی در ارتفاع بسیار پایین
هنگامی که پهپاد داده ها را در محیط با ارتفاع بسیار کم جمع آوری و ارسال می کند، سیگنال دریافتی شامل مولفه LOS و مؤلفه چند مسیری است. فرض کنید که سایه فقط بر مؤلفه LOS تأثیر می گذارد. در محیط شهری محو شدن سایه مشهود است. با توجه به تأثیر سایه در کانال ارتباطی، فرض می شود که مؤلفه LOS از توزیع لگاریتمی تبعیت می کند. سیگنال دریافتی عبارت است از:
جایی که دبلیو(تی)دامنه مولفه پراکندگی است که از توزیع رایلی تبعیت می کند. اف(تی)فاز مولفه چند مسیری است که به طور یکنواخت در بازه توزیع شده است [–π،π). آ(تی)دامنه مولفه LOS است که از توزیع Lognormal تبعیت می کند، اف0مرحله قطعی مولفه LOS است. دبلیو(تی)، اف(تی)، آ(تی)مستقل از یکدیگر هستند.
فرض کنید که آ(تی)بدون تغییر باقی می ماند، تابع چگالی احتمال مشروط پوشش سیگنال دریافتی آر(تی)=|آر(تی)|، که از توزیع برنج تبعیت می کند:
جایی که 2λ02میانگین توان پراکنده است و راضی می کند 2λ02=E[دبلیو2].
وقتی α تمایل به 0 دارد، توان سیگنال دریافتی از توان مولفه چند مسیره تشکیل شده است و هیچ جزء LOS وجود ندارد. تنظیم ایکس=آrλ02، v = 1:
معادله (18) را با معادله (17) جایگزین کنید:
در این زمان، W از توزیع ریلی تبعیت می کند:
انتظارات ریاضی مشروط از پاکت سیگنال دریافتی با معادله احتمال کل محاسبه می شود. fآر(r)=Eآ[fآر|آ(r|آ)]:
جایی که μ=E[لوگاریتم(آ)]، د0=Vآr[لوگاریتم(آ)].
تابع چگالی احتمال پوشش سیگنال دریافتی تحت تأثیر محو شدن سایه مناسب برای مدل Loo محاسبه می شود:
شرایط کانال در زمان واقعی از طریق داده های جمع آوری شده توسط پهپاد برآورد می شود. پارامترهای معادله (21) با پارامترهای واقعی مرتبط هستند (د،σایکس2،کr)به منظور محاسبه واریانس سایه σایکس2[ 17 ] و عامل برنج K [ 18 ]. در مرحله اول، Kr از تابع چگالی نرخ احتمال K مشتق شده است . تابع چگالی احتمال محاسبه شده K در کانال به شرح زیر است:
معادله (24) تابع چگالی احتمال یک متغیر لگ نرمال است. بنابراین:
با توجه به رابطه لحظه اول تابع چگالی احتمال لگ نرمال، بیان Kr را می توان با استفاده از رابطه (27) به دست آورد :
جایی که μآرآمیانگین توان مولفه LOS و همچنین لحظه دوم مولفه LOS است.
هنگامی که هر دو فرآیند تصادفی ریلی و فرآیندهای تصادفی لگ نرمال در دسی بل بیان می شوند، می توان آنها را مستقیماً هنگام محاسبه بهره یا تضعیف اضافه و کم کرد. سپس مقدار متوسط توان دریافتی است اس¯=μآرآ+2λ02، که با توجه به رابطه (27) قابل محاسبه است. اصطلاحات مربوطه با عبارات ارائه می شود:
جایگزینی معادلات فوق به معادله (22):
لحظه دوم [ 19 ] جزء LOS با نشان داده می شود μآرآ=انقضا(2μ+2د0):
تنظیم کردیم Ψ=10ال جی(پتی/آرآ)، که در آن R a توان جزء LOS دریافتی و واریانس آن است Ψبرابر است با واریانس سایه [ 20 ]. سپس تابع چگالی احتمال از Ψاست:
جایی که Ψاز توزیع نرمال تبعیت می کند، ز=10/لوگاریتم(10). سپس د0را می توان به صورت زیر بیان کرد:
با توجه به معادله (23) مدل را با پارامترهای برآورد شده مرتبط می کنیم و تابع احتمال قدرت سیگنال دریافتی را به صورت زیر بدست می آوریم:
که در آن S توان سیگنال دریافتی است.
4.1.2. تحلیل BER مدل SUUL
با توجه به متغیر میانی γ=ستیسن0، γ¯=تیسن0س¯، بنابراین:
تابع چگالی احتمال نسبت سیگنال به نویز (SNR) به صورت زیر است:
جایی که γ¯میانگین نسبت سیگنال به نویز هر نماد است، σایکس2واریانس سایه است.
با توجه به معادله زیر [ 21 ] می توان بیان نرخ خطای بیت (BER) را به دست آورد:
برای مدولاسیون PSK، بیان BER به صورت زیر محاسبه می شود:
این ξنرمال شده است به طوری که فقط به میانگین نسبت سیگنال به نویز در هر بیت مربوط می شود. برای نرمال سازی از معادلات زیر استفاده می شود:
BER نرمال شده به صورت زیر بیان می شود:
با این حال، معادله (42) را نمی توان به خوبی در شبیه سازی پیاده سازی کرد. مدل ارائه شده در [ 22 ] همچنان به عنوان یک تقریب برای استخراج BER، با در نظر گرفتن پیچیدگی محاسباتی و سایر عوامل استفاده می شود. این مدل همان ویژگی های کانال را به عنوان مدل در این مقاله مورد بحث قرار می دهد.
مدل ناکاگامی در [ 23 ] پیشنهاد شده است، و بزرگی مولفه LOS از توزیع ناکاگامی تبعیت می کند:
جایی که Γ(⋅)تابع گاما و m پارامتر توزیع ناکاگامی است، متر=μآرآ2Vآr[آرآ]≥0.
برای مدلسازی بهتر شرایط LOS مختلف در کانال، محدوده m را بگذارید [0،∞). در یک محیط محو چند مسیره [ 21 ] پارامتر توزیع مدل سنتی ناکاگامی از [0.5،∞). یک مقدار m مناسب برای شبیه سازی شرایط LOS در مناطق شهری انتخاب شده است.
پارامتر مدل (μآرآ،متر،λ02)با پارامتر اندازه گیری مرتبط هستند (د،کr،σایکس2)به منظور اعمال بهتر مدل تقریبی تابع چگالی احتمال تقریبی واریانس را بدست آورید Ψ:
پارامترها با پارامترهای مدل LOO همبستگی دارند و از گشتاور مرتبه دوم [ 24 ] برای بدست آوردن عبارات پارامترهای زیر استفاده می کنند:
جایی که Ψ“(⋅)اولین مشتق جزئی از است Ψ(⋅)[ 21 ].
μآرآو m را می توان با توجه به معادلات (46) و (45) محاسبه کرد. تابع چگالی احتمال پوشش سیگنال دریافتی را می توان با معادلات (17) و (43) و انتظارات ریاضی مشروط محاسبه کرد:
جایی که 1اف1( ; ; )تابع ابر هندسی همرو [ 21 ] است.
بنابراین، تابع چگالی احتمال توان دریافتی به صورت زیر است:
از آنجا که fγ(γ)=س¯γ¯fاس(س¯γ¯γ)، تابع چگالی احتمال از γرا می توان به صورت زیر بیان کرد:
تابع تولید لحظه را می توان به صورت [ 21 ] بیان کرد:
BER را در سیگنالهای BPSK همدوس ایدهآل همانطور که در رابطه (51) ارائه شده است، محاسبه کنید:
مطابق با λ0n2=λ02س¯، μآرآn=μآرآس¯BER نرمال شده را می توان به دست آورد.
4.2. ساخت مدل SULA کم ارتفاع از محیط شهری
در محیط کم ارتفاع، با افزایش ارتفاع پرواز پهپاد، چگالی توزیع پراکنده های پیچیده کاهش می یابد. تأثیر محو شدن سایه در کانال کمتر می شود. در این زمان، اثر داپلر ناشی از حرکت نسبی پهپاد و ایستگاه پایه زمینی نقش عمدهای در محو شدن سیگنال دارد. نرخ تغییر پوشش سیگنال متغیر با زمان متناسب با طیف گسترده داپلر است. تغییر داپلر بزرگ باعث تغییرات سریع در پوشش سیگنال متغیر با زمان می شود و سیگنال را مخدوش می کند. در کانال محو شدن مسطح مقیاس کوچک که توسط مدل کانال کلارک توصیف شده است، سیگنال های دریافتی ایستگاه های سیار دارای ویژگی های آماری شدت میدان بر اساس حالت پراکندگی هستند. این مطابق با ویژگی های محیط ارتباط سیار شهری در ارتفاع کم است که در آن مسیر مستقیم وجود ندارد. مدل جیک به خوبی با ویژگی های آماری مدل کلارک مطابقت دارد، بنابراین بر اساس مدل جیک بهینه شده است و فناوری شکل دهی پرتو برای دستیابی به جبران تغییر فرکانس داپلر برای بهبود قابلیت اطمینان ارتباطات اتخاذ شده است.
4.2.1. ساخت پرتو شکل دهی در محیط کم ارتفاع
در فرآیند انتقال سیگنال، سیگنال های مسیرهای مختلف تولید شده توسط اثر چند مسیری در زوایای مختلف به انتهای گیرنده می رسند. مسیرهای مختلف سیگنال با توجه به زاویه رسیدن موج متمایز می شوند. با مراجعه به مدل جیک، فرض بر این است که مسیر تولید شده توسط کانال چندمسیری کاملاً قابل جداسازی است. سیگنال هایی که از مسیرهای مختلف می رسند ویژگی های خاص خود را دارند. کانال چند مسیری متغیر با زمان پایه به صورت زیر است:
جایی که ηتوتاخیر نمونه برداری است، u مسیر انتقال سیگنال است، ساعتتو(n)یک مسیر فرعی متفاوت است. سیگنال های ارسال شده توسط مسیرهای مختلف به دلیل توزیع موانع، تضعیف متفاوتی را تجربه خواهند کرد. هنگامی که آنها از زوایای مختلف به انتهای گیرنده می رسند، سیگنال ها در هر مسیر تغییرات داپلر متفاوتی را ایجاد می کنند:
که در آن f D حداکثر فرکانس داپلر است، ساعت¯توتضعیف سیگنال است، θتوزاویه ورود سیگنال است، ψتوتغییر فاز مسیر u ام است که تابع توزیع یکنواخت است و T بازه نمونه برداری است.
آنتن همه جانبه عملکرد بهتری در سناریوهای تحرک بالا دارد. بنابراین، آرایه دایره ای یکنواخت (UCA) برای دستیابی به شکل دهی پرتو به منظور پوشش سیگنال دریافتی در تمام جهات اتخاذ می شود. همانطور که در شکل 4 نشان داده شده است. فاصله هر عنصر l است و عنصر اول به عنوان مرجع در نظر گرفته می شود. سیگنال دریافتی در حوزه زمان در عنصر i به صورت زیر است:
جایی که آر=منل/2πشعاع آرایه دایره ای یکنواخت است، λطول موج حامل است، αمن=(من–1)2πمنزاویه قطبی عنصر i است و طبق محاسبات نظری R حدود 30 سانتی متر است. زمن=[زمن(–نg)،⋅⋅⋅،zمن(ن–1)]تیافزودنی نویز گاوسی سفید است.
هنگامی که پهپاد داده ها را ارسال می کند، سیگنال در هر مسیر یک تغییر فرکانس داپلر متفاوت ایجاد می کند. اگر فرض شود که فقط یک زاویه ورود وجود دارد، می توان تغییر داپلر را تخمین زد.
در مرحله اول، فناوری شکل دهی پرتو آرایه دایره ای یکنواخت برای جداسازی تغییر فرکانس داپلر ناشی از اثر چند مسیری استفاده می شود. یک شبکه شکلدهی پرتو با مسیرهای مختلف u حاوی بردارهای شکلدهی پرتوی u مانند γمن=[γ(1)،⋅⋅⋅،γ(تو)].
این γ(تو)از هر u یک است من×1بردار سیگنال دریافتی پس از شکل دهی پرتو به صورت زیر است:
جایی که s پشته سیگنال دریافتی روی آنتن است که شرایط زیر را برآورده می کند:
با فرض اینکه سیگنال دریافتی با شرایط میدان دور مطابقت دارد. معادله (58) برای نشان دادن بردار فرمان در استفاده می شود θجهت یک سیگنال باند باریک با فرکانس حامل fج:
برای محاسبه وزن از روش حداقل مربعات استفاده می شود γ(تو). معادله (59) را می توان با محدودیت های الگوی تابش در بردار جهت مسیر به دست آورد:
خروجی مورد انتظار تحت محدودیت های الگوی تابش با نشان داده می شود جیآر=آراچγ→. در همان زمان، محدودیت حداقل مربعات در جهت Q تنظیم می شود و سپس:
خروجی مورد انتظار در این زمان است جیز=زاچγ→.
تابع هزینه با گرفتن ایجاد می شود E=جیز–زاچγ→همانطور که بردار خطا در رابطه (61) نشان داده شده است:
با توجه به رابطه (61) و خروجی مورد انتظار، وزن های شکل دهنده پرتو را می توان به صورت زیر بیان کرد:
4.2.2. طراحی الگوریتم جبران شیفت فرکانس داپلر
تأثیر تغییر داپلر بر عملکرد کانال ارتباطی پهپاد را نمی توان نادیده گرفت. باعث از بین رفتن تعداد زیادی بیت پیوسته، از دست رفتن بسته داده ها و مشکلات اعوجاج سیگنال می شود. با فرض اینکه سیگنال فقط تحت تأثیر اثر چند مسیره قرار می گیرد و اثر داپلر وجود ندارد، سیگنال دریافتی به صورت زیر است:
جایی که اچ(ω)است:
هنگامی که اثر چند مسیره و اثر داپلر همزمان وجود داشته باشند، فرض کنید تغییر فرکانس زاویه داپلر پرتو U است.ωتو=2πfتو، و |fتو|≤fD. سپس سیگنال دریافتی به صورت زیر است:
جایی که اچ(ω)است:
که در آن U تعداد کل مسیرهای ورود است، آتودامنه پرتو U است،τتوزمان رسیدن است
با فرض اینکه ارتباطات سیار یک سیگنال هارمونیک زمانی f = 10 هرتز را ارسال می کند و 16 مسیر ورود وجود دارد. نتایج تجربی در شکل 5 نشان داده شده است برای وجود و عدم وجود اثر داپلر
هنگامی که تغییر فرکانس داپلر وجود ندارد، سیگنال دریافتی همچنان یک سیگنال هارمونیک با زمان f است = 10 هرتز است و هیچ اعوجاجی وجود ندارد. هنگامی که یک جابجایی فرکانس داپلر وجود دارد، سیگنال دریافتی تحریف می شود و با افزایش زمان به طور مداوم تغییر می کند و در نتیجه قابلیت اطمینان ارتباط کاهش می یابد. نتایج نشان میدهد که تغییر فرکانس ناشی از اثر داپلر، عملکرد BER ارتباط پهپاد را کاهش میدهد. به منظور برآورده شدن قابلیت اطمینان ارتباطی مورد نیاز مدیریت اضطراری، لازم است داده ها با جبران تغییر فرکانس داپلر اصلاح شوند.
فرکانس داپلر بر اساس سیگنال AOAs جدا می شود و فرکانس داپلر مسیرهای مختلف جبران می شود. زمانی که حداکثر فرکانس داپلر fDو زاویه ورود θتواز مسیر u بدست می آید، فرکانس جبران مسیر است fDcosθتو.
جبران شیفت فرکانس داپلر مسیر u برابر است با:
بدون درون یابی خطی و تبدیل فوریه سریع، سیگنال دریافتی به صورت زیر است:
5. نتایج شبیه سازی
5.1. شبیه سازی مدل SUUL
روش مدولاسیون Minimum Shift Keying (MSK) در مدل سنتی Loo به کار گرفته شده است. با این حال موانع زیادی در ارتباط با پهپادهای بسیار کم ارتفاع وجود دارد. محو شدن و سایه در کانال باعث تغییر فاز سیگنال می شود. روش دمودولاسیون منسجم سنتی MSK برای این وضعیت مناسب نیست. بنابراین، روش مدولاسیون تغییر فاز باینری (BPSK) در این مقاله اتخاذ شده است. در آزمایش شبیهسازی، تأثیر سه پارامتر فیزیکی در کانال پهپاد در نظر گرفته میشود: میانگین نسبت سیگنال به نویز در واحد بیت، انحراف استاندارد سایهزنی و میانگین ضریب برنج. علاوه بر این، BER یک شاخص ارزیابی مهم در ارزیابی عملکرد کانال است. به ویژه در زمینه مدیریت اضطراری، فرآیند ارتباطات فوری، قطع لینک و خطای داده تاثیر زیادی بر کل سیستم خواهد داشت. در نتیجه، عملکرد BER مدل های سه کانال تحت شرایط پارامتر یکسان مقایسه شد.
رابطه بین BER و میانگین نسبت سیگنال به نویز در هر بیت در شکل 6 نشان داده شده است . سه منحنی در شکل عبارتند از: منحنی BER مدل Loo در حالت MSK، منحنی کانال ایده آل و منحنی کانال SUUL.
وقتی SNR تقریباً 10 دسی بل است، BER مدل SUUL است 10–5. در این مرحله، BER مدل LOO 10-2 است . مشاهده می شود که در همان محیط ارتباطی، نرخ خطای بیت مربوط به قابلیت اطمینان پهپادها در ارتباطات اضطراری مدل SUUL بسیار کمتر از مدل LOO است. قابلیت اطمینان بالا به این معنی است که پیوند ارتباطی پایدارتر است و کمتر مستعد از دست دادن بسته ها و تحریف داده ها است، بنابراین BER برای ارتباطات اضطراری ضروری است.
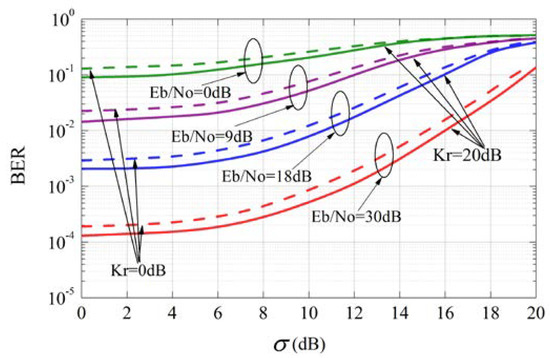
رابطه بین نرخ خطای بیت و انحراف استاندارد سایه در شکل 7 نشان داده شده است . Kr ضریب برنج است که به عنوان نسبت توان سیگنال اصلی به مولفه چند مسیری تعریف می شود. Kr برای منعکس کردن تأثیر محو شدن در مقیاس کوچک استفاده می شود . هنگامی که Kr از 0 دسی بل به 20 دسی بل تغییر می کند، می توان دید که روند کلی تغییر نرخ خطای کانال مشابه است. این بدان معنی است که کانال SUUL پایداری خوبی در محیط های مختلف محو شدن در مقیاس کوچک دارد.
از سوی دیگر، دامنه تغییرات منحنی BER در سناریوهای مختلف SNR کاملاً متفاوت است. هنگامی که SNR کوچک است، نرخ خطای بیت با افزایش انحراف استاندارد سایه نسبتاً هموار تغییر می کند. در این زمان، سایه تأثیر کمی بر عملکرد کانال پهپاد دارد. هنگامی که SNR به مقدار متوسط یا زیاد می رسد، تغییر در نرخ خطای بیت آشکار است، به این معنی که سایه تأثیر بیشتری بر عملکرد کانال ارتباطی دارد. به عبارت دیگر، هنگامی که SNR بزرگ است، عملکرد کانال تحت تاثیر سایه و محو شدن در مقیاس کوچک قرار می گیرد. هنگامی که SNR سیگنال دریافتی کوچک است، مربوط به ارتباط از راه دور، تأثیر سایه بر روی کانال را می توان در این زمان تقریبا نادیده گرفت.
رابطه بین عدم قطعیت مدل SUUL و انحراف معیار سایه در شکل 8 نشان داده شده است . عدم قطعیت به تفاوت BER زمانی که Kr اشاره دارد0 دسی بل و 20 دسی بل تحت شرایط یکسان نسبت سیگنال به نویز است. این تأثیر محو شدن در مقیاس کوچک بر سیگنال دریافتی تحت همان محیط محو شدن سایه و همان نسبت سیگنال به نویز است. مشاهده می شود که با افزایش انحراف استاندارد سایه، عدم قطعیت سیستم به صورت غیر خطی کاهش می یابد. در محیط ارتباطی میدان نزدیک، زمانی که نسبت سیگنال به نویز به مقدار بزرگتری در حدود 18 دسی بل تا 30 دسی بل می رسد، مقدار عدم قطعیت سیستم بسیار زیاد است. در این زمان، محو شدن سایه تأثیر عمده ای بر کانال پهپاد دارد. در ارتباطات از راه دور، یعنی زمانی که نسبت سیگنال به نویز 0 دسی بل است، مقدار عدم قطعیت سیستم کوچکترین است، و تأثیر سایه بر BER را می توان نادیده گرفت، اما تأثیر محو شدن در مقیاس کوچک باید در نظر گرفته شود. . از این رو، پیدا کردن اینکه مشخصه های کانال با تغییر فاصله ارتباطی تغییر می کند، دشوار نیست. یعنی زمانی که ارتفاع از ارتفاع بسیار کم به ارتفاع کم تغییر می کند، باید مدل های کانال متفاوتی برای تغییر ویژگی های کانال ایجاد شود تا عملکرد کانال بهبود یابد.
5.2. شبیه سازی مدل SULA
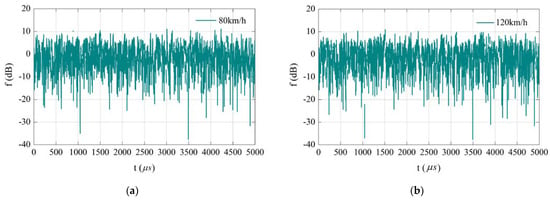
اثر داپلر در اثر حرکت نسبی ایجاد می شود. شکل 9 الف تأثیر اثر داپلر بر روی پوشش سیگنال دریافتی زمانی است که سرعت 80 کیلومتر در ساعت در کانال ریلی است. هنگامی که سرعت 120 کیلومتر در ساعت است، تأثیر اثر داپلر در شکل 9 ب نشان داده شده است.
با توجه به نتایج شبیه سازی، حداکثر تضعیف پوشش پهپاد در سرعت بالا بیشتر از سرعت پایین است. مشاهده می شود که هر چه پهپاد سریعتر حرکت کند، تضعیف سیگنال قوی تر است و بالعکس. با افزایش سرعت، تأثیر اثر داپلر بر روی پوشش سیگنال دریافتی بیشتر و بیشتر آشکار می شود. در فرآیند انتقال اطلاعات، تعداد زیادی بیت متوالی به دلیل محو شدن و تغییر فرکانس داپلر از بین می روند که منجر به افزایش نرخ خطای بیت می شود.
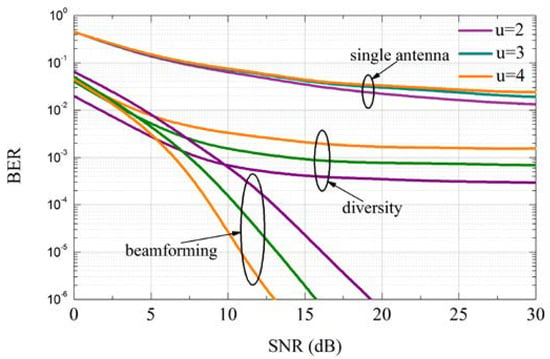
شکل 10 عملکرد BER یک گیرنده تک آنتن، یک گیرنده تنوع 16 عنصری و یک گیرنده شکل دهی پرتوی 16 عنصری را در سه شماره مسیر مختلف نشان می دهد.
از شکل 10 قابل مشاهده استکه نرخ خطای بیت یک کانال تک آنتن به طور قابل توجهی بیشتر از دو روش دیگر در شرایط کانال مشابه است. هنگامی که نسبت سیگنال به نویز کوچک است، نرخ خطای کانال روش تنوع چند آنتنی مشابه کانال SULA است که در این مقاله ایجاد شده است. با این حال، از آنجا که فناوری تنوع چند آنتن مسیر جهت هر واحد را از هم جدا نمی کند، تأثیر تغییر فرکانس داپلر بر روی مسیر هنوز وجود دارد که منجر به تداخل دامنه فرکانس و افزایش نرخ خطای بیت می شود. بنابراین، با افزایش نسبت سیگنال به نویز، میزان خطای بیت کانال SULA به طور قابل توجهی کاهش می یابد، اما نرخ خطای بیت کانال تنوع چند آنتن کمی تغییر می کند. متقابلا، مدل SULA از فناوری شکل دهی پرتو آرایه دایره ای یکنواخت برای جداسازی فرکانس های داپلر مسیرهای ورود مختلف و سپس تصحیح آنها به طور جداگانه استفاده می کند که می تواند تأثیر تغییر فرکانس داپلر را بر کانال بهتر از بین ببرد. به طور خاص، درشکل 10 ، خط نارنجی منحنی نرخ خطای بیت سیستم را زمانی که تعداد مسیرها بزرگتر است، نشان می دهد. نرخ خطای بیت کانال هایی که از فناوری های تنوع تک آنتنی و چند آنتنی استفاده می کنند با افزایش تعداد مسیرها افزایش می یابد. با این حال، مدل کانال پیشنهادی در این مقاله ابتدا مسیرها را جدا میکند و سپس تغییر داپلر را جبران میکند. با افزایش تعداد مسیرها، اثر افزایش الگوریتم مهم تر می شود و میزان خطای سیستم همچنان در حال کاهش است.
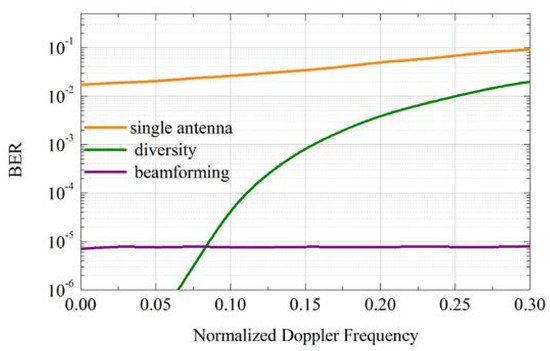
عملکرد BER فرکانس های مختلف داپلر نرمال شده در سه مورد در شکل 11 نشان داده شده است . تعداد توروی 3 ثابت است، واحد آنتن 16 و SNR 15 دسی بل است. مشاهده می شود که عملکرد روش تنوع چند آنتنی و روش شکل دهی پرتو بسیار بهتر از روش تک آنتنی است. با این حال، با افزایش فرکانس داپلر نرمال شده، نرخ خطای بیت روش تنوع چند آنتنی به شدت افزایش می یابد. به همین ترتیب، عملکرد مدل SULA تحت پسوندهای مختلف داپلر ثابت می ماند. بنابراین، هنگامی که پهپاد در حال انتقال داده است، حتی اگر محیط ارتباطی دائما در حال تغییر و پیچیدهتر شدن باشد، نرخ خطای بیت این مدل همچنان در محدوده کمی نگه داشته میشود. این امر قابلیت اطمینان ارتباطات را هنگامی که کار اضطراری در حال انجام است تضمین می کند.
6. بحث
از یک سو، تمام تحقیقات در این مقاله مبتنی بر تحلیل ویژگیهای کانالی محیط شهری است. با این حال، در محیط حومه شهر، تراکم ساختمان ها و پوشش گیاهی کم است و احتمال وجود مؤلفه LOS بیشتر است. با ویژگی های کانال شهر متفاوت است. برای جهانی شدن مدل و داشتن عملکرد بهتر در محیط برون شهری، مدل نیاز به بهبود و به روز رسانی بیشتر دارد. چنین مدل های کانال برای سناریوهای مختلف نیاز به مطالعه بیشتر دارند. از سوی دیگر، روش تنظیم تطبیقی مدلهای کانال فوقالعاده کم ارتفاع و ارتفاع کم نیاز به بهبودهای بعدی دارد. این مقاله انتخاب کانال را بر اساس ارتفاع پرواز بصری پهپاد تعیین می کند. با این حال، در چینش ساختمان ها در کشورها و شهرهای مختلف تفاوت هایی وجود دارد. اگر پارامترهای کانال اندازهگیری شده توسط پهپادها بهعنوان استانداردهای تطبیقی مورد استفاده قرار گیرند، این که آیا قابلیت اطمینان مدل کانال بیشتر بهبود مییابد باید مورد مطالعه قرار گیرد. به عنوان مثال، زمانی که پارامترهای کانال به مقدار مشخصی می رسند، مدل کانال به طور خودکار تنظیم می شود. این مسیر اصلی تحقیقات بعدی خواهد بود.
7. نتیجه گیری
در یک محیط شهری، چگالی توزیع و موقعیت پراکنده های پیچیده در ارتفاعات مختلف متفاوت است. این باعث تفاوت در ویژگی های کانال می شود. در مواجهه با ویژگی های کانال پیچیده و متغیر محیط شهری، خطاهای ناشی از استفاده از یک کانال، چالش های بزرگی را برای قابلیت اطمینان انتقال داده ها ایجاد کرده است. در مدیریت اضطراری شهری، به منظور کاهش تضعیف، تداخل، از دست دادن، اعوجاج و از دست دادن بسته داده ها در طول فرآیند انتقال، یک مدل کانال SUUL-SULA تطبیقی دقیق تر در این مقاله ایجاد شده است. کانال با توجه به ارتفاع به دو قسمت ارتفاع فوق العاده کم (0~100 متر) و ارتفاع کم (100~1000 متر) تقسیم می شود. اول از همه، در ارتفاع بسیار کم، تراکم توزیع موانع مانند ساختمان ها و درختان نسبتاً زیاد است. به دلیل تأثیر این پراکنده های پیچیده، محو شدن در مقیاس بزرگ و محو شدن در مقیاس کوچک باعث می شود سیگنال در مسیرهای مختلف انتقال تلفات و تضعیف زیادی را تجربه کند. بنابراین، بر اساس مدل LOO، مدل SUUL ارائه شده در این مقاله فرض میکند که جزء LOS از توزیع لگ نرمال تبعیت میکند و جزء چند مسیره از توزیع ریلی تبعیت میکند. تحت این شرایط، تابع چگالی احتمال و نرخ خطای بیت سیگنال دریافتی به دست می آید. ثانیاً در محیط کم ارتفاع، با افزایش ارتفاع پرواز پهپاد، تأثیر محو شدن سایه روی کانال به تدریج ضعیف می شود. در این زمان، تغییر فرکانس داپلر ناشی از سرعت پرواز پهپاد تأثیر عمدهای بر کاهش سیگنال دارد. یک مدل کانال SULA بر اساس مدل جیک پیشنهاد شده است. فناوری شکل دهی پرتو آرایه دایره ای یکنواخت برای طراحی الگوریتم جبران تغییر فرکانس داپلر به کار گرفته شده است. در نهایت، نتایج تجربی نشان میدهد که کانال SUUL-SULA بهبود خوبی در عملکرد BER و پایداری سیستم دارد که قابلیت اطمینان ارتباط پهپاد را بهبود میبخشد.
مشارکت های نویسنده
روششناسی، نرمافزار و نگارش – آمادهسازی پیشنویس اصلی، بینگ هان. تجزیه و تحلیل رسمی، بینگ هان و دانیانگ شین. نوشتن-بررسی و ویرایش، بینگ هان، دانیانگ کین، لین ما، پینگ ژنگ و مرهاویت برهانه تکلو؛ مدیریت منابع و پروژه، Danyang Qin. نظارت، Danyang Qin، Lin Ma، Ping Zheng و Merhawit Berhane Teklu همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده اند و با آن موافقت کرده اند.
منابع مالی
این تحقیق توسط بنیاد ملی علوم طبیعی چین (61771186)، پروژه جوانان برجسته بنیاد علوم طبیعی استانی چین در سال 2020 (YQ2020F012) و برنامه پرستاری برای دانش پژوهان جوان با استعدادهای خلاق در استان هیلونگجیانگ (UNPYSCT-201712) تامین شده است.
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
منابع
- فنگ، Q. مک گیهان، جی. طامه، EK; Nix، مدلهای از دست دادن مسیر AR برای کانالهای رادیویی هوا به زمین در محیطهای شهری. در مجموعه مقالات شصت و سومین کنفرانس فناوری وسایل نقلیه IEEE 2006، ملبورن، VIC، استرالیا، 7 تا 10 می 2006. صفحات 2901-2905. [ Google Scholar ]
- الحورانی، ع. کندیپان، اس. جمالیپور، ع. مدلسازی افت مسیر هوا به زمین برای سکوهای ارتفاع کم در محیطهای شهری. در مجموعه مقالات کنفرانس ارتباطات جهانی IEEE 2014، آستین، TX، ایالات متحده، 8-12 دسامبر 2014. ص 2898-2904. [ Google Scholar ]
- زمان، MA; مامون، SA; غفار، م. عالم، م.م. مدلسازی کانال انتشار چند مسیره هوا به زمین VHF ممتاز، MI و تجزیه و تحلیل خصوصیات کانال و عملکرد BER. در مجموعه مقالات کنفرانس بین المللی IEEE منطقه 8 2010 در زمینه فناوری های محاسباتی در مهندسی برق و الکترونیک (SIBIRCON)، ایرکوتسک، روسیه، 11-15 ژوئیه 2010. صص 335-338. [ Google Scholar ]
- Sklar، B. Rayleigh کانال های محو شدن در سیستم های ارتباط دیجیتال سیار. I. شخصیت پردازی. IEEE Commun. Mag. 1997 ، 35 ، 90-100. [ Google Scholar ] [ CrossRef ]
- برنج، م. رنگ، ر. ولینگ، مدل کانال باریک K. برای تله متری هوانوردی. IEEE Trans. هوانوردی الکترون. سیستم 2000 ، 36 ، 1371-1376. [ Google Scholar ]
- کم، احتمال خطای بیت PY MDPSK روی کانال محو شدن غیرانتخابی رایلی با دریافت تنوع. IEEE Trans. اشتراک. 1991 ، 39 ، 220-224. [ Google Scholar ] [ CrossRef ]
- سوزوکی، اچ. یک مدل آماری برای انتشار رادیویی شهری. IEEE Trans. اشتراک. 1977 ، 25 ، 673-680. [ Google Scholar ] [ CrossRef ]
- کلارک، RH نظریه آماری دریافت رادیو موبایل. بل سیست. فنی J. 1968 , 47 , 957-1000. [ Google Scholar ] [ CrossRef ]
- دینگ، ی. شیائو، ی. زی، جی. Zhang, T. یک مدل کانال انتقال متغیر با زمان برای ارتباطات هوا-زمین. در مجموعه مقالات سی و ششمین کنفرانس سیستم های اویونیک دیجیتال IEEE/AIAA 2017 (DASC)، سن پترزبورگ، فلوریدا، ایالات متحده آمریکا، 17 تا 21 سپتامبر 2017؛ صص 1-8. [ Google Scholar ]
- Cotton, SL سایهزنی بدن انسان در ارتباطات سلولی دستگاه به دستگاه: مدلسازی کانال با استفاده از مدل سایهدار $ \kappa-\mu $ محو شدن. IEEE J. Sel. مناطق کمون. 2014 ، 33 ، 111-119. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لو، سی. باترورث، اندازهگیری و مدلسازی کانال ماهوارهای موبایل JS Land. Proc. IEEE 1998 ، 86 ، 1442-1463. [ Google Scholar ]
- سیمونک، م. Fontán، FP; Pechac، P. کانال انتشار کم ارتفاع پهپاد در مناطق شهری: تجزیه و تحلیل آماری و ژنراتور سری زمانی. IEEE Trans. انتشار آنتن 2013 ، 61 ، 3850-3858. [ Google Scholar ] [ CrossRef ]
- یانگ، جی. لیو، پی. مائو، اچ. مدل و شبیهسازی کانال محو شدن باند باریک زمین به هوا بر اساس فرآیند مارکوف. در مجموعه مقالات کنفرانس بین المللی 2011 در محاسبات شبکه و امنیت اطلاعات، Guilin، چین، 14-15 مه 2011; صص 142-146. [ Google Scholar ]
- Loo, C. یک مدل آماری برای پیوند ماهواره ای زمینی. IEEE Trans. وه تکنولوژی 1985 ، 34 ، 122-127. [ Google Scholar ]
- باترورث، جی. Matt, E. توصیف اثرات انتشار برای خدمات ماهواره ای سیار زمینی. در مجموعه مقالات اینتر. Conf. سیستم های ماهواره ای برای ارتباطات سیار و ناوبری، تورنتو، ON، کانادا، 25-27 مه 1983; ص 51-54. [ Google Scholar ]
- Molisch، AF; آسپلوند، اچ. هدرگوت، آر. اشتاین باوئر، ام. Zwick, T. مدل کانال جهت دار COST259-بخش اول: بررسی اجمالی و روش شناسی. IEEE Trans. سیم. اشتراک. 2006 ، 5 ، 3421-3433. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ارسگ، وی. گرینشتاین، LJ; Tjandra، SY; پارکوف، اس آر. گوپتا، ا. کولیچ، بی. جولیوس، AA; Bianchi, R. یک مدل از دست دادن مسیر مبتنی بر تجربی برای کانال های بی سیم در محیط های حومه شهر. IEEE J. Sel. مناطق کمون. 1999 ، 17 ، 1205-1211. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جیانگ، اف. Swindlehurst، AL بهینهسازی پهپاد در مسیر اتصال زمین به هوا. IEEE J. Sel. مناطق کمون. 2012 ، 30 ، 993-1005. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Blaszczyszyn، B. Karray، MK برآورد رگرسیون خطی پارامترهای انتشار تلفات با استفاده از اندازهگیریهای موبایل در شبکههای سلولی بیسیم. در مجموعه مقالات دهمین سمپوزیوم بینالمللی 2012 در مورد مدلسازی و بهینهسازی در شبکههای موبایل، موقت و بیسیم (WiOpt)، پادربورن، آلمان، 14 تا 18 مه 2012. صص 54-59. [ Google Scholar ]
- Krishnamoorthy, K. Handbook of Statistical Distributions with Applications ; چپمن و هال/CRC: نیویورک، ایالات متحده آمریکا، 2006. [ Google Scholar ]
- سیمون، MK; علوئینی، م.- س. ارتباطات دیجیتال از طریق کانال های محو شده ; جان وایلی و پسران: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 2005; جلد 95. [ Google Scholar ]
- یانگ، کیو. پان، SJ; Zheng، VW تخمین مکان با استفاده از Wi-Fi. IEEE Intell. سیستم 2008 ، 23 ، 8-13. [ Google Scholar ] [ CrossRef ]
- عبدی، ع. لاو، WC; علوئینی، م.-س. کاوه، م. یک مدل ساده جدید برای شبکه های ماهواره ای سیار زمینی: آمار مرتبه اول و دوم. IEEE Trans. سیم. اشتراک. 2003 ، 2 ، 519-528. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گرادشتاین، IS; Ryzhik، IM جدول انتگرال ها، سری ها و محصولات ; انتشارات آکادمیک: نیویورک، ایالات متحده آمریکا، 2014. [ Google Scholar ]









بدون دیدگاه