1. معرفی
ارزیابی وضعیت یک مرحله اساسی در پروژه های حفاظتی ساختمان ها و محوطه های تاریخی است [ 1 ]. می توان آن را به عنوان بخشی از فرآیند برنامه ریزی مداخلات آتی بر روی بناهای تاریخی در نظر گرفت و ارتباط قوی با نقشه برداری هندسی با تکنیک های نقشه برداری سنتی و مدرن دارد.
فناوری اسکن لیزری و فتوگرامتری دیجیتال میتواند مجموعهای دقیق از نقشههای اندازهگیری شده را در قالبهای CAD (طراحی به کمک رایانه) (مانند پلانها، مقاطع و ارتفاعات)، مدلهای سه بعدی پیشرفته بر اساس هندسه خالص یا مدلهای پارامتریک مانند مدلسازی اطلاعات ساختمانهای تاریخی ارائه دهد. (HBIM) [ 2 ]. امروزه فتوگرامتری [ 3 ] و اسکن لیزری [ 4] بهترین راه حل های موجود برای ثبت هندسه بناها و محوطه های تاریخی هستند. استفاده از ابرهای نقطه ای متراکم، تمام اطلاعات را برای ثبت سطوح و بی نظمی های آنها، مانند ضخامت متغیر یا انحراف از عمودی، فراهم می کند. با این حال، بررسی هندسی اطلاعاتی در مورد مصالح ساختمانی و شرایط آنها ارائه نمی دهد، که می تواند تخریب مداوم ناشی از ترکیبی از آسیب شناسی ها باشد.
ثبت فن آوری های ساخت و ساز، مصالح و شرایط آنها بخشی از جریان کار یک پروژه مرمت کامل است. نقشه های فنی پایه ای را تشکیل می دهد که چنین اطلاعاتی در آن ثبت می شود. به عنوان مثال، آسیب شناسی های مختلف موجود در یک نما را می توان در یک ارتفاع با استفاده از دریچه ها، نمادها و رنگ ها نشان داد. یک افسانه معنای هر نماد را توضیح می دهد، مانند مثال نشان داده شده در شکل 1 .
در سالهای اخیر، پیشرفتها در ابزارهای دیجیتالی برای بررسی هندسی، تحویلهای جدیدی را ارائه کرده است که در آن اطلاعات مواد و پوسیدگی ثبت میشود [ 5 ]. پشتیبانی های بصری دقیق، مانند تصاویر تصحیح شده یا نقشه های CAD، محبوب ترین راه حل های مورد استفاده توسط متخصص در حفاظت هستند. امروزه، پرکاربردترین راه حل برای ثبت شرایط بر روی سطوح صاف (به عنوان مثال، دیوار، کف، نمای ساختمان) عکاسی اصلاح شده است. یک تصویر (یا مجموعهای از تصاویر) با حذف افکت پرسپکتیو تصحیح میشود و یک تصویر متریک به دست میآید که میتواند برای تعیین کمیت مناطق استفاده شود. موفقیت بزرگ برای استفاده از تصاویر تصحیح شده در چنین کاربردهایی را می توان با توجه به در دسترس بودن دوربین های دیجیتال و روش های ساده برای تصحیح تصویر توضیح داد [ 6 ]]. عکسها را میتوان با استفاده از مجموعهای از خطوط افقی و عمودی و نسبت عرض به ارتفاع (تصحیح هندسی) یا مجموعهای از نقاط کنترل (حداقل چهار) که با ابزار دیگری اندازهگیری میشوند، به عنوان مثال، یک ایستگاه کل تصحیح کرد. اعوجاج تصویر ناشی از لنز (مثلاً جلوه های بشکه یا بالشتک) را می توان با چندین بسته نرم افزاری که دارای پایگاه داده ای از پارامترهای کالیبراسیون اکثر دوربین های دیجیتال است، حذف کرد. همچنین، دوربین های دیجیتال را می توان با استفاده از روش های استاندارد کالیبره کرد [ 7 ].
سپس چندین بسته نرم افزاری ارزان قیمت یا رایگان برای تصحیح تصویر در بازار تجاری موجود است. کاربران می توانند به سرعت تصاویر را برای مستندسازی سطوح مسطح ساختمان ثبت کنند. سپس تصاویر با عملیات ساده ای که به دانش فتوگرامتری خاصی نیاز ندارند به نقشه های متریک تبدیل می شوند. در نهایت، تصاویر تصحیح شده به نرم افزار CAD وارد می شوند. اپراتور ممکن است مواد مختلف و شرایط آنها را تشخیص داده و زیر آنها خط بکشد، مناطق همگن را با خطوط یا دریچهها شناسایی کند، کار را در لایههای مختلف سازماندهی کند، و مناطق را اندازهگیری کند که یک کمیسازی متریک برای برنامهریزی مداخلات آینده به دست میآورد [ 8 ].]. این عملیات همچنین میتواند در نرمافزار GIS (سیستم اطلاعات جغرافیایی) ساختار یافته و یک پایگاه داده اضافی متصل به مداخلات مختلف فراهم کند و محاسبه هزینه را سادهتر کند.
یک رویکرد فتوگرامتری دقیقتر برای اسناد دیجیتالی برای سطوح پیچیدهای که نمیتوان با یک صفحه تقریب زد، مورد نیاز است. به عنوان مثال طاق ها، ستون ها یا دیوارهای منحنی هستند. فتوگرامتری به کاربران این امکان را می دهد که مدل های سه بعدی بافت دار تولید کنند، یعنی مدل های سه بعدی دقیقی که در آن اطلاعات رنگی با نمایش چندین تصویر بر روی مدل سه بعدی به دست می آید. سپس میتوان با نمایش مدل بافتدار روی صفحه مرجع [ 9 ]، عکسهای اورتوفوتو تولید کرد.
از سوی دیگر، مناطق اندازهگیری شده بر روی عکسهای ارتوفوتوی عناصر منحنی با مناطق واقعی مورد نیاز در یک پروژه حفاظتی مطابقت ندارد. مناطق ضرب شده در هزینه های یکنواخت، قیمت مداخله را فراهم می کند. به همین دلیل، مدل باید ابتدا باز شود و یک نمایش مسطح به دست آید که مناطق واقعی را فراهم می کند. چنین عملیاتی همیشه امکان پذیر نیست و فقط برخی از اجسام را می توان با حداقل تغییر شکل باز کرد. این مورد در مورد آن دسته از اشکالی است که می توان آنها را با یک استوانه (به عنوان مثال، یک طاق بشکه، یک ستون دایره ای) یا یک مخروط تقریب زد [ 10 ].
در مورد عناصر پیچیدهتر، مانند مجسمهها یا سطوحی که نمیتوان آنها را از نظر ریاضی باز کرد، یک مدل سه بعدی دقیق برای محاسبه مناطق ضروری است. از سوی دیگر، استفاده از مدل های پیچیده سه بعدی برای نقشه برداری مواد و شرایط در پروژه های واقعی کمتر رایج است. متخصصان حفاظت به طور سنتی سادهسازی هندسه را برای ادامه استفاده از نقشههای دو بعدی ترجیح میدهند، که میتوان آنها را چاپ کرد و در محل مورد استفاده قرار داد، جایی که بازرسی بصری برای درک سطوح و آسیبشناسی آنها ضروری است.
هدف کار شرح داده شده در این مقاله، نشان دادن یک رویکرد جدید برای نگاشت شرایط است، که بخشی از مشکل کلی تر مربوط به ارزیابی شرایط است [ 11 ]. راه حل پیشنهادی مبتنی بر رویکردهای مرسوم مانند نقشه های CAD (یعنی پلان ها، مقاطع و ارتفاعات)، تصاویر تصحیح شده یا مدل های سه بعدی نیست. این کار مورد تصاویر کروی (متعادل مستطیل) [ 12 ] را در نظر می گیرد.
بازار تجاری چندین دوربین 360 درجه را ارائه می دهد که برای فرصتی برای ثبت کل صحنه اطراف عکاس محبوب تر می شوند. قیمت بسیار متغیر است، از سنسورهای ارزان قیمت (کمتر از 100 دلار ) تا دوربین های حرفه ای (> 10000 دلار ). پیشرفت سریع تکنولوژی در این نوع فناوری ها به بلوغ قابل توجهی رسیده است و سنسورها با قیمتی بین 100 تا $300 دارای وضوح بزرگتر از 20 تا 30 مگاپیکسل است. رابطه دقیق بین دنیای واقعیت مجازی و دوربینهای 360 درجه نیز یکی دیگر از شاخصهای امیدوارکننده پیشرفتهای تکنولوژیکی مورد انتظار است که با رشد مستمر از نظر وضوح هندسی و رادیومتری و کاهش هزینهها همراه است.
دوربینهای سیصد و شصت درجه به اپراتورهایی که در فتوگرامتری متخصص نیستند اجازه میدهند تا به سرعت سایتهای بزرگ با فضاهای متعدد را ثبت کنند، زیرا کل صحنه اطراف عکاس گرفته میشود [ 13 ]. این روش همچنین ابزار قدرتمندی برای ثبت فضاهای کوچک و باریک است که معمولاً به چندین عکس استاندارد نیاز دارند که باید در یک تصویر متریک تصحیح و موزاییک شوند. مستندسازی با تصاویر 360 درجه برای تعداد زیادی از برنامههای کاربردی بسیار جذاب است که نه تنها به ساختمانهای تاریخی محدود میشود، با وجود این، این مقاله بر روی برنامههای مرتبط با اسناد ساختمان تمرکز دارد.
هدف این کار توسعه و آزمایش یک ابزار جدید برای متخصصان حفاظت بود که میتواند در مواردی که راهحلهای سنتیتر نیاز به عملیات زمانبر برای تولید عکسهای اصلاحشده، عکسهای ارتوگرامتری سه بعدی، نقشههای CAD و مدلهای سهبعدی دارند، بسیار مفید باشد. .
کار ارائه شده در این مقاله در سه بخش مختلف ساختار یافته است که از قیاس با فتوگرامتری سنتی شروع می شود. ابتدا، مورد تصحیح تصاویر کروی مورد بحث قرار می گیرد، که در آن مناطق “تحریف” نقشه برداری شده روی تصویر 360 درجه به مناطق متریک تبدیل می شوند. سپس، نشان خواهیم داد که تصاویر 360 درجه را می توان برای فتوگرامتری سه بعدی استفاده کرد و یک کوچه باریک را با مجموعه ای از تصاویر مستند کرد. نتیجه یک مدل سه بعدی با بافت فوتورئالیستی خواهد بود که سپس به مجموعهای از عکسهای اورتوفوتو برای نقشهبرداری از خرابیهای مختلف تبدیل میشود.
بخش آخر مقاله نحوه بازیابی مطابقت پیکسل به پیکسل را از دنباله ای از تصاویر 360 درجه ای که در دوره های مختلف به دست آمده است، نشان می دهد. از آنجایی که دوربین 360 درجه در همان نقطه قرار نمی گیرد، هدف این بود که روشی برای بازیابی تراز ایجاد شود تا دو تصویر همپوشانی بهتری برای بازرسی بصری داشته باشند.
هر بخش یک یا چند مثال را برای توصیف نتایج قابل دستیابی گزارش می کند.
2. ارزیابی وضعیت از طریق تصحیح متریک تصاویر 360 درجه
2.1. تبدیل پروجکشن متساوی الزاویه به پرسپکتیو مرکزی
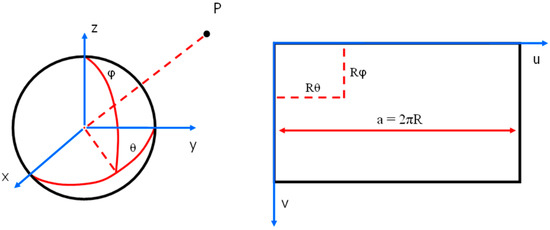
تصاویر سیصد و شصت درجه، برآمدگی های مستطیل شکل هستند (به آنها تصاویر کروی نیز گفته می شود) از طریق دوخت تصویر چندین تصویر مبتنی بر قاب یا چشم ماهی [ 14 ]. دوربین های کروی مجموعه ای از چندین حسگر هستند که در جهات مختلف نگاه می کنند. اکثر دوربین های دیجیتال 360 درجه دارای دو یا چند لنز چشم ماهی با کالیبراسیون نسبی شناخته شده هستند که امکان تولید یک طرح ریزی را فراهم می کند که منطقه ای 360 × 180 درجه را برای جهت های افقی و عمودی پوشش می دهد. به چنین تصاویری «پانوراما» نیز می گویند (از یونانی πᾶν «همه» + ὅραμα «منظر» تشکیل شده اند)، و نماهایی با زاویه دید گسترده هستند که واقعیت را با تجسم پویا از یک مکان ثابت نشان می دهند.
طرح نهایی کره ای است که شعاع R برابر با فاصله کانونی f دوربین است. طرح ریزی مستطیل شکل هم به نام نگاشت طول و عرض جغرافیایی برای ارتباط بین مختصات پیکسل و مختصات جغرافیایی نامیده می شود. کره با استفاده از روابط [ u , v ] T = R [ θ�، ϕϕ] T ، جایی که ( θ�، ϕϕ) جهت های زاویه ای افقی و عمودی (به ترتیب طول و عرض جغرافیایی) و ( u , v ) مختصات پیکسل هستند ( شکل 2 ) [ 15 ].
برآمدگی های مستطیل شکل نه مطابق، نه مساوی یا هم ارز هستند، بنابراین زوایای واقعی، فواصل و مساحت ها را نمی توان با استفاده از چنین نمایش های نقشه کشی اندازه گیری کرد. قطب های کره به دو قسمت با طولی برابر با محیط کره تبدیل می شوند. بنابراین، استوا و قطب ها دارای طول یکسان هستند و در نتیجه تغییر شکل های قوی برای اوج و نادر ایجاد می شود.
ارتفاع پانوراما برابر با طول یک نصف النهار است. شعاع کره به صورت R = a /2π محاسبه می شود که a عرض پیکسل پانوراما است.
فرض کنید که هدف مسئله اندازه گیری ناحیه ای است که تحت تأثیر خرابی های خاص قرار گرفته است. علاوه بر این، ما فرض میکنیم که زوال روی دیوار صاف تأثیر میگذارد. پس از به دست آوردن یک تصویر کروی، می توان یک چرخش مصنوعی در امتداد جهت عمودی اعمال کرد تا تجسم را تغییر دهد به طوری که نقطه مرکزی دیوار دارای طول جغرافیایی θ = 0 باشد . که محور x جدید ( θ = 0) از نقطه میانه دیوار عبور خواهد کرد.
چرخش مصنوعی اجازه می دهد تا نقطه کره را بر روی صفحه x = f = R با رابطه ساده [1, R tan θ , R (cos θ ) -1 cot φ )] T که هم ترازی بین مرکز کره، نقطه روی کره، و نقطه مماس بر صفحه مماس بر کره در نقطه [1,0,0]. در اینجا ( R tan θ ) و ( R (cos θ ) -1 cot φ) را می توان به عنوان مختصات تصویر یک تصویر جدید در نظر گرفت، که دیگر یک تصویر مستطیل شکل نیست. تصویر جدید یک پرسپکتیو مرکزی خواهد بود (تصویر سوراخ سوراخ یا تصویر قاب نیز نامیده می شود). علاوه بر این، مرکز تصویر کروی، مرکز نمایش تصویر جدید نیز هست.
بدیهی است که این روش نمی تواند با تغییرات طول جغرافیایی زیاد کار کند. با این حال، یک راه حل، تقسیم تصویر کروی به چهار ناحیه kπ /2 ≤ θ < ( k + 1) π /2 است، که در آن پارامتر k دارای مقادیر زیر k = 0، …، 3 است. سپس، چهار تصویر سوراخ محلی هستند. نشات گرفته.
چندین تقسیم بندی احتمالی دیگر از تصویر اصلی وجود دارد که میدان دید بزرگتر یا کوچکتری ایجاد می کند. همچنین میتوان زاویه دید را برای کاهش یا بزرگتر کردن میدان دید (FoV) تغییر داد که ممکن است با π /2 متفاوت باشد. مورد سقف نیاز به نمایش تصاویر در امتداد محور Z دارد.
2.2. روش تصحیح تصویر
تبدیل تصویری مسطح (یا هموگرافی) یک نقشه برداری معکوس از یک نقطه در P2 به یک نقطه در P2 است. این تبدیل با یک ماتریس 3 × 3 غیر منفرد H نشان داده می شودبا 8 درجه آزادی این نوع نقشه برداری اغلب در فتوگرامتری و بینایی کامپیوتری (CV) استفاده می شود. تصحیح دیجیتال یک تکنیک نقشه برداری است که در مواردی از اجسام مسطح استفاده می شود، زیرا امکان اندازه گیری مستقیم مقادیر متریک (زوایه ها، نسبت های فاصله و غیره) را فراهم می کند. فرآیند تصحیح را می توان بر روی تصویر اصلی اعمال کرد، که از نظر هندسی اصلاح شده و نمونه برداری مجدد شده است تا صفحه تصویر جدید موازی با جسم باشد. درون یابی مقادیر RGB را می توان با روش های مختلف انجام داد، به عنوان مثال، نزدیک ترین همسایه یا درون یابی دو خطی/دو مکعبی. در نهایت، اگر از چندین تصویر برای پوشاندن کل جسم استفاده شود، می توان آنها را برای تولید موزاییک ترکیب کرد.
تصویر تصحیح شده فرصتی برای به دست آوردن داده های متریک با حفظ جلوه فوتورئالیستی می دهد. به همین دلیل، این روش برای بررسی اشیایی که میتوانند با یک صفحه تقریب شوند، بسیار محبوب است (به عنوان مثال، نقاشیها یا نمای ساختمان، اگر هیچ عنصری دور از صفحه جهانی اتخاذ شده وجود نداشته باشد). نرم افزارهای تجاری مختلفی وجود دارند که قادر به انجام این کار هستند (Perspective Rectifier، PhoToPlan، TriDmetriX، و غیره).
به خوبی شناخته شده است که یک نقطه در صفحه به عنوان بردار ستونی x = ( x , y ) T مشخص می شود. این جفت مقدار مختصات ناهمگن نامیده می شود . مختصات همگن یک نقطه را می توان با اضافه کردن یک مختصات اضافی به جفت به دست آورد. این آخرین مختصات جدید یک سه گانه x = ( λx , λy , λ ) T را به دست می دهد و می گوییم که این سه بردار همان نقطه در مختصات همگن است (برای هر مقدار غیر صفر λ ). یک بردار همگن دلخواه x = ( x 1, x 2 , x 3 ) T نشان دهنده نقطه x = ( x 1 / x 3 , x 2 / x 3 ) T در R 2 است.
هموگرافی مسطح یک نقشه برداری معکوس است که با یک ماتریس 3×3 نشان داده می شود:
که در آن H یک ماتریس غیر مفرد است و دارای 8 درجه آزادی است.
تخمین H نیاز به مجموعه ای از نقطه با نقطه x ↔ x مطابقت دارد (حداقل چهار). حل با مختصات ناهمگن بر اساس معادلات زیر است:
که در آن آخرین عنصر H بر روی h 9 = 1 تنظیم شد تا ابهام مقیاس در نظر گرفته شود. هر نقطه دو معادله خطی در عناصر H به دست می دهد که برای نوشتن یک سیستم معادلات به شکل Ah = b استفاده می شود ، جایی که h = [ h 1 , …, h 8 ] T . اگر چهار نقطه متناظر داده شود، ماتریس A دارای هشت ردیف و b یک هشت بردار است. این سیستم را می توان برای h با استفاده از تکنیک های حل معادلات خطی حل کرد (با توجه به det( A) ≠ 0). اگر بیش از چهار نقطه مطابقت داده شود (مجموعه معادلات بیش از حد تعیین شده)، جواب دقیق نیست و معمولاً از تخمین حداقل مربعات استفاده می شود.
مهم است که بگوییم یک دوربین از قبل باید از نظر فتوگرامتری کالیبره شود زیرا اعوجاج تصویر باعث ایجاد ناهماهنگی بین (i) مرکز چشم انداز، (ii) تصویر و (iii) نقاط جسم می شود [ 7 ]. درک اینکه اصل هم خطی بودن دیگر رعایت نمی شود بسیار ساده است. مدلسازی اعوجاج لنز به فرد اجازه میدهد تا این اثر را به شدت کاهش دهد.
پروژه های فتوگرامتری استاندارد اغلب بر اساس تصاویر گرفته شده با دوربین های کالیبره شده هستند، که در آن از یک مدل تصحیح هشت ترم (گاهی اوقات 10 ترم) برای حذف اعوجاج از تصویر (یا از مختصات تصویر اندازه گیری شده x , y ) استفاده می شود. مقادیر تصحیح زیر:
که در آن ( x 0 , y 0 ) مختصات نقطه اصلی هستند، ( k 1 , k 2 , k 3 ) ضرایب اعوجاج شعاعی، ( p 1 , p 2 ) ضرایب اعوجاج عدم تمرکز و r = [( x − x 0 ) + ( y − y 0 )] 1/2 فاصله شعاعی است.
2.3. تصحیح تصاویر به دست آمده از پروجکشن هم گوشه
اجازه دهید یکی از تصاویر به دست آمده از طرح ریزی مستطیل شکل را در نظر بگیریم. پارامترهای جهت گیری داخلی در یک ماتریس کالیبراسیون کپسوله می شوند:
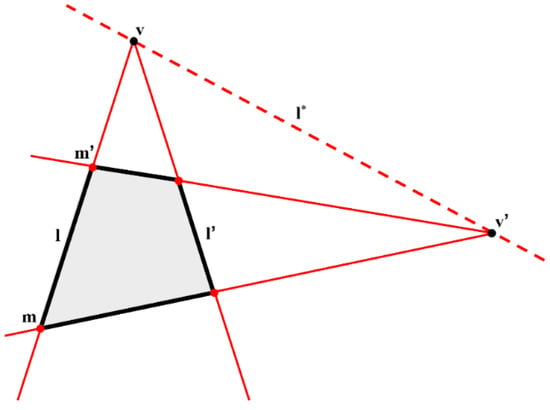
تصویر هیچ اعوجاج ناشی از لنزها (به عنوان مثال، جلوه های بشکه ای و بالشتکی معمولی) ندارد. بنابراین، هیچ اصلاحی نباید برای جبران چنین اثری اعمال شود. تصویر جدید اکنون بر اساس مدل دوربین سوراخ سوزنی است و می توان آن را با استراتژی های سنتی (مثلاً با استفاده از نقاط کنترل) اصلاح کرد. از سوی دیگر، ماتریس کالیبراسیون اطلاعات اضافی را برای فرآیند یکسوسازی فراهم می کند. اگر بتوان دو مجموعه از خطوط موازی (نه لزوما افقی و عمودی) را شناسایی کرد، خط ناپدید l * را می توان از نقاط ناپدید تخمین زد ( شکل 3 )، که می تواند با استفاده از مختصات پیکسل محاسبه شود. جهت صفحه جسم با توجه به دوربین را می توان از طریق n معمولی به صفحه به صورت n محاسبه کرد.= K T l * [ 16 ].
تصویر را می توان برای به دست آوردن نمای موازی جلو از طریق هموگرافی H = KRK -1 تصحیح کرد ، که در آن بردار یکنواخت u n = n /‖ n ‖ در جهت Ru n = [0,0,1] T تراز شده است . ماتریس R از مجموعه ای از بردارها تشکیل شده است که یک مجموعه متعارف را تشکیل می دهند: R = [ u r , u s , u n ] T . با این حال، تصویر جلویی جدید به دلیل چرخش حول n معمولی دارای ابهام است. در چند کلمه، در سه بعد، تعداد نامتناهی بردار عمود بر n وجود دارد. این منجر به یک سیستم معادلات نامشخص می شود. برای بدست آوردن عبارت بردارهای متعامد u r , u s و u n کافی است بردار یکنواختی u r و u را که از u n شروع می شود تولید کنیم . راهحلهای متعددی برای این مشکل وجود دارد، اما یک انتخاب راحت شامل ایجاد تصویر تصحیح شده نهایی است به طوری که یکی از مجموعههای خطوط موازی افقی (یا عمودی) باشد.
در نهایت، تصویر(های) تصحیح شده را می توان در نرم افزار CAD وارد کرد، جایی که می توان مناطق را با استفاده از دریچه های مختلف نقشه برداری کرد. چنین عملیاتی دستی است و به یک متخصص اپراتور در ارزیابی وضعیت نیاز دارد. بخش بعدی یک مثال را نشان می دهد.
2.4. نمونه ای از اصلاح از یک تصویر 360 درجه و نقشه خرابی
شکل 4 گردش کار کلی روند اصلاح شرح داده شده در بخش قبل را نشان می دهد. یک تصویر منفرد مستطیل شکل در داخل یک اتاق کوچک از Albergo Diurno di Porta Venezia، یک سازه هیپوژیا واقع در میلان، ایتالیا به دست آمد. انتخاب برای استفاده از یک تصویر تک مستطیلی به دلیل اندازه کوچک اتاق است که مستندات متریک آن با عکاسی اصلاح شده استاندارد به چندین تصویر برای دیوارهای مختلف و موزاییک کردن تصویر پس از اصلاح نیاز دارد. یک برجستگی تک و مستطیل شکل برای گرفتن کل اتاق کافی است، که سپس با تغییر زاویه افقی و تنظیم یک FoV کافی به نماهای مختلف تقسیم می شود.
اتاق فقط از چهار دیوار متعامد تشکیل نشده است. اتاق های کوچک با زاویه 45 درجه در دو گوشه اتاق نشان داده شده است. چنین دیوارهایی سیستم های اضافی مانند نیروگاه گرمایش و ستون هایی را که عناصر باربر کل مجموعه را تشکیل می دهند، پوشش می دهند. بنابراین، طرح ریزی مستطیل شکل باید به شش تصویر فرعی با یک FoV متغیر، اما فاصله کانونی یکسان تقسیم شود. همانطور که در بخش قبل ذکر شد، طرح ریزی نقطه کره بر روی صفحه محلی مماس بر کره یک قاب جدید (پین هول) تصاویر را ارائه می دهد که می توان با به دست آوردن تصاویر متریک تصحیح کرد.
بدیهی است که المان های نصب شده بر روی زمین اصلاح نمی شوند، اما این موضوع در تمام مراحل یکسوسازی رایج است. متخصص حفاظت از مزایا و معایب اصلاح متریک آگاه است. به طور کلی، شکل 3 تصویر کروی به دست آمده، انتخاب شش تصویر سوراخ سوزنی جدید و تصحیح متریک آنها را برای به دست آوردن تصاویر قابل اندازه گیری برای فاز نقشه برداری زیر نشان می دهد.
شکل 5یکی از نماها را با مکانیسم های فرسودگی مشخص نشان می دهد. تصویر با روشهای سنتی در اتوکد، اعمال دریچهها و اندازهگیری مساحت آنها ایجاد شد. یک منطقه مرطوب بزرگ، زوال شدید ناشی از رطوبت، با الگوی عمودی غالب ناشی از گرانش را نشان می دهد. اثر مربوط به تیره شدن سطح است. ناحیه بنفش تحت تأثیر تاول قرار می گیرد، یعنی جدا شدن لایه سطحی بیرونی که با هوا پر شده است. نواحی آبی رسوبی را نشان می دهد که تجمع مواد روی سطح است که در اثر خرابی طولانی سازه ایجاد می شود. الگوی قرمز آن مناطق دارای ترک را مشخص می کند که عمدتاً روی کاشی ها قرار دارند. رنگ فیروزه ای نشان دهنده از بین رفتن اجزا است، یعنی جدا شدن برخی از کاشی ها احتمالاً ناشی از نمک است. سرانجام،
همین روش ممکن است برای کف و سقف اعمال شود ( شکل 6 ). از آنجایی که دوربین در وسط اتاق قرار گرفته است، میتوان تجسم برآمدگی مستطیل شکل را روی +0° و +180 درجه قرار داد و یک FoV کافی تنظیم کرد و سپس تصاویر سوراخ سوزنی ایجاد کرد. همچنین، در این مورد، می توان چنین تصاویری را با استفاده از دو مجموعه خط موازی و مقدار فاصله کانونی تصحیح کرد. شکل 7 اثرات زوال شناسایی شده بر روی سقف را نشان می دهد که عمدتاً توسط تاول های منتشر ایجاد می شود. چند ترک روی گچ نیز نشان داده شده است.
3. نقشه برداری خرابی با استفاده از مدل سازی سه بعدی با تصاویر 360 درجه
3.1. فتوگرامتری سه بعدی (سه بعدی) با تصاویر کروی
اکثر کاربردهای فتوگرامتری سه بعدی مبتنی بر دوربین های پرسپکتیو مرکزی (که به آن ها “قاب” یا “پین هول” نیز گفته می شود) است، با وجود این، لنزهای چشم ماهی نیز برای بازسازی متریک برای FoV بزرگتر خود بسیار محبوب شده اند [ 17 ]. قصد نویسندگان این نیست که در اینجا اصول اولیه فتوگرامتری را مرور کنند، زیرا چندین کتاب راهنما در ادبیات فنی موجود است (به عنوان مثال، به کار [ 18 ] مراجعه کنید.]). بازار تجاری چندین راهحل برای مدلسازی سه بعدی خودکار با استخراج نقطه اتصال جریان کار تلفیقی، تنظیم بسته (که ممکن است شامل کالیبراسیون خود دوربین در صورت لزوم باشد) و تطبیق تصویر متراکم برای بازسازی سطح ارائه میدهد. نمونه هایی از بسته های نرم افزاری برای فتوگرامتری برد نزدیک عبارتند از Agisoft PhotoScan، PhotoModeler، ContextCapture، RealityCapture، Pix4Dmapper، و 3D Flow Zephyr و غیره.
هدف این کار نشان دادن این است که تصاویر کروی را می توان برای فتوگرامتری سه بعدی استفاده کرد، با وجود این، مدل دوربین هندسی استفاده شده کاملاً متفاوت است و به فرمول ریاضی خاصی نیاز دارد. تصاویر (حداقل دو) به دست آمده از نقاط مختلف را می توان برای ایجاد یک مدل سه بعدی استفاده کرد. تصاویر چندگانه را میتوان با پیروی از گردش کار معمولی برای پردازش تصویر بر اساس مدل دوربین کروی (متعادلگوش) پردازش کرد. برای برخی از نمونههای مدلسازی سهبعدی از دوربینهای 360، خواننده به آثار موجود در ادبیات ارجاع داده میشود [ 19 ، 20 ، 21 ، 22 ، 23 ، 24 ، 25 ].
فتوگرامتری کروی برای ارزیابی شرایط به یک جایگزین معتبر برای فتوگرامتری سنتی در مورد فضاهای دراز و باریک تبدیل می شود. مجموعه کوچکی از تصاویر کروی ممکن است جایگزین چندین تصویر سوراخ سوزن شوند. علاوه بر این، دوربین را می توان به هر جهت حول محور عمودی جهت داد، زیرا میدان اکتساب داده 360 درجه ای که پوشش کامل صحنه را در اطراف تضمین می کند. این گزینه همچنین مرحله اکتساب تصویر را هنگامی که توسط اپراتورهایی که در مدل سازی سه بعدی مبتنی بر تصویر متخصص نیستند، ساده می کند.
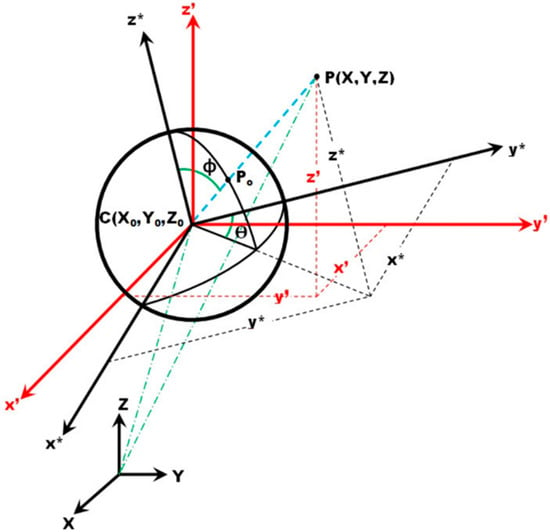
گردش کار برای فتوگرامتری کروی با آنچه در تصاویر استاندارد سوراخ سوزنی اتخاذ شده است متفاوت نیست. آنچه به طور قابل توجهی متفاوت است، مدل ریاضی برای جهت گیری تصویر است، یعنی تنظیم دسته کروی که در ابتدا توسط نویسندگان [ 26 ] فرموله شد و از معادلات تنظیم شبکه های ژئودزی شروع شد. از آنجایی که تصویر کروی را می توان به عنوان یک کره یکنواخت در نظر گرفت (مختصات پیکسل تبدیل به طول و عرض جغرافیایی، شکل 8 )، نقشه برداری بین نقطه تصویر در کره یکنواخت x* = [ x * ، y * ، z * ] T و مربوطه نقطه شی X*= [ X * , Y * , Z * ] T به سادگی با ضریب مقیاس λ به صورت x * = λ X* بیان می شود. مبدأ سیستم مرجع ( XYZ ) * مرکز کره است، در حالی که محورهای آن با قراردادی که برای اندازهگیری مختصات تصویر طول و عرض جغرافیایی استفاده میشود، تعریف میشوند. ضریب مقیاس معکوس فاصله بین مرکز پرسپکتیو تصویر (منشا) و نقطه شی است. ضریب مقیاس ممکن است به صورت تخمین زده شود د=λ– 1= ∥ایکس∗∥�=�−1=‖�*‖.
یک نقطه در یک کره یکنواخت مختصات زیر را دارد:
جایی که زوایا بردار مشاهده را تشکیل می دهند. آنها مشاهدات مؤثری نیستند، زیرا اپراتور مختصات پیکسل ( u ، v ) را اندازه می گیرد. شعاع R تصویر کروی در طول دوخت تصاویر تک سوراخ تخمین زده می شود و این تنها پارامتر کالیبراسیون برای این نوع پانوراماها است.
یک تصویر پانوراما منفرد را می توان به عنوان مجموعه داده مشاهده شده با استفاده از تئودولیت بدون اندازه گیری فاصله در نظر گرفت. در واقع، هر دو سیستم می توانند زوایا را در امتداد دو صفحه عمود اندازه گیری کنند. از طرف دیگر، تراز کردن تصویر کروی امکان پذیر نیست، در حالی که این عملیات با یک ایستگاه کامل (به لطف وجود سنسورهای تراز) بسیار ساده است. این بدان معنی است که برای اصلاح عدم عمودی بودن باید یک اصلاح اضافی اضافه شود که منجر به تخمین پارامترهای اضافی برای تصاویر مختلف می شود. بنابراین، محور z * مرتبط با تصویر موازی با محور Z سیستم زمین نیست) و دو زاویه تصحیح ( αایکس��، αy��) باید حول محورهای ابزاری برآورد و اعمال شود:
که در آن ماتریس چرخش R برای تراز نشده (یعنی دوربین مانند یک ایستگاه کل تراز نیست) و تصویر پانوراما به شرح زیر است:
این روش فرض می کند که زاویه ها نسبتاً کوچک هستند، که در اکثر پروژه ها یک فرض قابل قبول است زیرا مجموعه تصاویر معمولاً بدون کج شدن خاص دوربین به دست می آیند.
معادلات همخطی برای تصاویر کروی ممکن است با تقسیم ساده دو ردیف اول در معادله (8) نوشته شود. علاوه بر این، ردیف سوم موارد زیر را نشان می دهد:
اگر چندین پانوراما در دسترس باشد، می توان آنها را با این فرمول جدید مدل دوربین تنظیم کرد، مشروط بر اینکه نقاط متناظر کافی بین تمام پانوراماها استخراج شده باشد. این به این واقعیت منجر می شود که با توجه به مجموعه ای از پانوراما و مطابقت تصویر آنها، موقعیت کره ها و مختصات شی نقاط تصویر را می توان محاسبه کرد.
با توجه به مجموعهای از پانوراما و مطابقتهای تصویری آنها، اکنون میتوان موقعیت کرهها و مختصات شی تناظرها را تعیین کرد. راه حل از طریق حداقل مربعات پس از خطی شدن آنها با بسط سری تیلور، از مقادیر تقریبی برای همه پارامترهای ناشناخته، تخمین زده می شود.
هنگامی که ژستهای دوربین (کره) تخمین زده میشوند (با مختصات شی سهبعدی مطابقتهای تصویر نیز)، بازسازی صحنه را میتوان با روشهای معمولی پیمایشی که مبتنی بر تقاطع پرتوهای متعدد است، انجام داد.
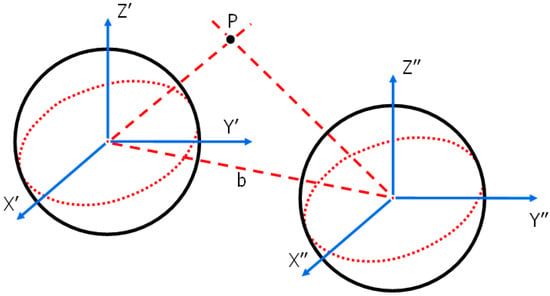
این سیستم را می توان با استفاده از برخی از نقاط کنترل سه بعدی برای رفع کمبود مبنا و استخراج نتایج متریک حل کرد. اگر هیچ اطلاعات نقطه کنترلی در دسترس نباشد، یک پانوراما را می توان با استفاده از شرایط همسطح بودن نسبتاً نسبت به دیگری جهت یابی کرد ( شکل 9 ):
جایی که
-
b x ، b y ، b z → اجزای خط مبنا b بین دو پانوراما.
-
M ″ و M ″ → ماتریس چرخش پانوراما.
-
مختصات شی دو تناظر X ′, Y , Z ′ و X ″, Y ″, Z ″.
بخش های بعدی دقت متریک قابل دستیابی با چنین مجموعه ای از تصاویر را نشان می دهد ( بخش 3.2 ). بخش 3.3 نحوه استفاده از بلوکی از تصاویر کروی و محصول به دست آمده از ارزیابی شرایط را نشان می دهد.
3.2. ارزیابی دقت روش پیشنهادی
ارزیابی متریک دقت روش پیشنهادی با مجموعهای از 15 تصویر بهدستآمده با Xiaomi Mijia Mi Sphere 360 انجام شد. تصاویر در یک گاراژ با شرایط روشنایی بد بهدست آمدند. علاوه بر این، سطوح دارای بافت بدی هستند و می توانند منجر به مشکلات تطبیق رویه های خودکار موجود در نرم افزار مورد استفاده شوند. این منطقه دارای ابعاد 10.9 متر × 6 متر × 3.7 متر است.
مجموعه ای از اهداف چاپ شده بر روی ورق های کاغذی در منطقه قرار داده شد: 6 هدف به عنوان نقطه کنترل و 11 هدف به عنوان نقطه بازرسی قرار گرفتند. مختصات با یک ایستگاه کل Leica TS30 (دقت زاویه 0.5 اینچ، دقت فاصله 0.6 میلی متر)، با استفاده از اندازه گیری های مکرر برای بهبود دقت متریک چنین مجموعه داده ای اندازه گیری شد.
پردازش فتوگرامتری با سه راه حل انجام شد: (1) راه حل پیشنهادی در این مقاله، و نرم افزارهای تجاری (2) Agisoft PhotoScan و (iii) Pix4Dmapper. در سالهای اخیر، برخی از نرمافزارهای تجاری که با توجه به رویکردهای فتوگرامتری و دید کامپیوتری توسعه یافتهاند، مدل دوربین کروی دوربین را اضافه کردهاند. نمونههایی از بستههای نرمافزاری که از این مدل دوربین پشتیبانی میکنند، Agisoft PhotoScan و Pix4Dmapper هستند که پس از تنظیم مدل دوربین کروی، میتوان از گردش کار سنتی استفاده شده برای تصاویر فریم استفاده کرد. چنین نرمافزاری از مدل دوربین کروی پشتیبانی میکند و میتواند برای پردازش بلوکهای تصویر بهدستآمده با Xiaomi Mijia Mi Sphere 360 استفاده شود. تنها اندازهگیری دستی، شناسایی مختصات هدف در تصاویر بود.
تصاویر به طور خودکار با نقاط کراوات استخراج شده توسط استراتژی های تطبیق خودکار موجود در هر نرم افزار جهت گیری می شوند. تصویری از میدان آزمایش در شکل 10 نشان داده شده است . نقاط بررسی آمار در جدول 1 نشان داده شده است و دقت حدود 6 میلی متر را نشان می دهد، در حالی که محل آزمایش 10.9 متر × 6 متر × 3.7 متر است. دقت نسبی به دست آمده حدود 1:2000 است که برای کاربردهای متریکی که نیاز به تولید قابل تحویل (طرح ها، مقاطع، ارتفاعات) در مقیاس 1:100 دارند، کافی است.
3.3. نمونه ای از نقشه برداری زوال با استفاده از یک مدل سه بعدی از فتوگرامتری کروی
دنباله ای از هشت تصویر کروی در داخل یک کوچه باریک به دست آمد که دارای دو دیوار عمودی و یک طاق بشکه است. دوربین مورد استفاده در این پروژه Xiaomi Mijia Mi Sphere 360 است که حدود 300 دلار قیمت دارد. چنین تصاویر کروی دارای وضوح (حداکثر) 6912 × 3456 پیکسل هستند و می توانند با استفاده از مجموعه ای از تصاویر جلو و عقب ایجاد شوند. نرم افزار دوخت تصویر Madventure 360 Camera است که برای دو پلتفرم موبایل و دسکتاپ موجود است.
جمع آوری داده ها در کمتر از یک دقیقه انجام شد و یک عملیات ساده بود. یعنی کاربر به سادگی در امتداد کوچه قدم زد و تصاویر را گرفت. تنها پارامتری که باید از قبل تنظیم می شد نوردهی صحیح بود که کیفیت تصویر خوب را در داخل کوچه که فضای نسبتاً تاریکی است تضمین می کند. به دست آوردن تصاویر با شرایط روشنایی خوب یک مسئله اساسی در مورد تصاویر کروی است. از آنجایی که دوربین کل صحنه اطراف عکاس را می گیرد، اطمینان از روشنایی مطلوب در هر جهت دشوار است. در مطالعه موردی، تصاویر دارای نوردهی خوبی برای دیوارهای عمودی و طاقها هستند، در حالی که ناحیه ابتدا و انتهای کوچه بیش از حد در معرض نور مستقیم خورشید قرار دارد. نمونه ای از طرح ریزی مستطیل شکل در شکل 11 نشان داده شده است.
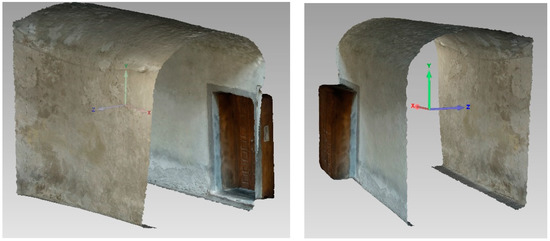
مدل سه بعدی تولید شده با استفاده از گردش کار فتوگرامتری در شکل 12 نشان داده شده است . همانطور که مشاهده می شود، چند برآمدگی مستطیل شکل می تواند جایگزین بسیاری از تصاویر سوراخ سوزنی مورد نیاز در پروژه های فتوگرامتری استاندارد شود. مدل با فاصله مشخصی بین دو نقطه مقیاس بندی شد که با یک نوار به دست آمد. پردازش دادهها فقط به چند دقیقه نیاز داشت و منجر به یک مش بافت شد. چنین مثالی نشان میدهد که یک دوربین 360 درجه میتواند ابزار معتبری برای بررسی فضاهای باریک باشد، که در صورت استفاده از یک دوربین قاب سنتی به تعداد بیشتری از تصاویر نیاز دارد.
در نهایت، میتوان عکسهای دیجیتالی برای دیوارهای عمودی تولید کرد، در حالی که طاق بشکه برای اندازهگیری مستقیم مناطق واقعی در طول فاز نقشهبرداری باز شد. شکل 13 نتیجه ارزیابی وضعیت یکی از دیوارها و طاق را نشان می دهد. دیوار دارای ترک هایی در سطح گچ است که در قسمت پایین دیوار به دلیل افزایش رطوبت که حرکت آرام رطوبت به سمت بالا است، کاملاً جدا شده است.
مشکل اصلی که در طاق پیدا می شود لایه برداری منتشر است که جدا شدن بسیاری از قسمت های لایه سطحی است که در برخی موارد پیچ خوردگی را نشان می دهد. برخی از مناطق تحت تأثیر رطوبت نیز نشان داده شده است.
4. بازیابی تناظرهای پیکسل به پیکسل برای ترسیم خرابی چند زمانی
4.1. جزئیات تحلیلی رویه ثبت چندموقت
تصاویر کروی همچنین می توانند به عنوان ابزاری سریع برای بازرسی و نظارت استفاده شوند. ایده این است که تصاویر را در دوره های مختلف برای ردیابی تغییرات رخ داده در طول زمان ثبت کنیم. چنین تحلیلی در دو سطح قابل انجام است:
در مواردی که نواحی نیاز به محاسبه دارند، میتوان رویههایی را که در بخشهای قبلی توضیح داده شد، برای این منظور اعمال کرد. یک کار مهم در پروژه های حفاظتی، تجزیه و تحلیل تغییرات است که با استفاده از ارزیابی بصری قابل شناسایی است. در چنین حالتی، تولید یک مجموعه داده چند زمانی از تصاویر کروی با تطابق کامل پیکسل به پیکسل مفید خواهد بود. این نتیجه را می توان به سادگی با قرار دادن دوربین در یک مکان ثابت و سپس گرفتن مجموعه ای از تصاویر در زمان های مختلف به دست آورد. نقطه ضعف آن نیاز به یک دوربین ثابت است که نمیتوان آن را به چندین اتاق منتقل کرد.
هدف این بخش نشان دادن نحوه بازیابی مکاتبات پیکسل به پیکسل در مورد تصاویر کروی به دست آمده در دوره های مختلف است. روش پیشنهادی به اپراتور اجازه میدهد دوربین را حذف کند، که میتواند برای مستندسازی چندین اتاق در پروژههای مختلف استفاده شود. راهحل پیشنهادی یک پیادهسازی الگوریتمی است که نیاز به تصاویری دارد که طبق قوانین خاصی به دست آمدهاند، که برای کاربرانی که در تحلیل تصویر متخصص نیستند نیز ساده است.
اجازه دهید از یک ملاحظه ساده شروع کنیم: تصاویر کروی نوعی تصاویر پانوراما هستند. ایجاد یک پانورامای کروی بدون استفاده از دوربین 360 درجه بسیار ساده است. چندین عکس گرفته شده از یک نقطه با چرخاندن دوربین به دور مرکز چشم انداز آن به دست می آید. این تصاویر سپس دوخته شده و با طرح ریزی مستطیل شکل ترسیم می شوند.
در این مورد، برعکس چنین رویهای اعمال میشود، زیرا دوربین 360 درجه میتواند مستقیماً تصویر نهایی متساوی الاضلاع را ارائه دهد. ایده این است که مجموعه ای از تصاویر قاب (تصاویر سوراخ سوزنی) را از طرح ریزی مستطیل شکل استخراج کنیم. چنین تصاویری باید دارای همپوشانی کافی برای نصب مجدد با رویههای مورد استفاده برای تولید پانوراما باشند.
با توجه به دو برآمدگی مستطیل شکل E1�1و E1�1این روش که در دوره های مختلف از یک مکان مشابه به دست می آید، با تقسیم هر دو طرح ریزی به مجموعه ای از تصاویر قاب شروع می شود. اف1اف1و اف2اف2، که در یک پروژه ثبت واحد پردازش می شوند تا برآمدگی های مستطیل شکل را بازسازی کنند E∗1�1*و E∗2�2*، که در آن ناهماهنگی اولیه جبران می شود.
اگر دوربین 360 درجه در یک موقعیت مشابه در هنگام گرفتن تصویر در دوره های مختلف قرار گیرد، می توانیم فرض کنیم که پیش بینی ها برای خطای تغییر موقعیت دوربین متفاوت است. این به دلیل دیدگاههای مختلف (ترجمه)، تغییر زاویه افقی (چرخش) و تنظیم نبودن دوربین است. مشکل شبیه به تغییر موقعیت یک ایستگاه کل در یک نقطه می شود، که در آن دایره افقی جهت گیری متفاوتی دارد، به علاوه مسائل اضافی مربوط به عدم وجود سنسور تراز در دوربین.
همانطور که گفته شد، هر دو تصویر کروی به تصاویر سوراخ سوزنی متعدد تقسیم می شوند. ابتدا مجموعه ای از 12 تصویر سوراخ سوزنی از یک تصویر کروی ایجاد می شود. هر تصویر دارای یک FoV از π/2 × π/2 است. فاصله کانونی برابر با شعاع کره؛ و نقطه مرکزی هر تصویر مربوط به طول جغرافیایی N π/6 است، که در آن N مقادیر زیر را در نظر می گیرد: 0، 1، 2، …، و 11. سپس مجموعه دیگری از تصاویر با تغییر زاویه عمودی π بدست می آید. /4. این به ما امکان می دهد مجموعه ای جدید از هشت تصویر را با یک FoV از π/2 × π/2 تولید کنیم که هر M π/4 به دست می آید، که در آن پارامتر Mدارای مقادیر 0، 1، 2 و 3 است. در نهایت، یک تصویر با استفاده از تغییر +π/2 برای تولید پانورامای عمودی به سمت جهت عمودی به دست می آید.
خواننده می تواند بپرسد که چرا مجموعه ای از تصاویر با اعمال تغییرات زیر و بمی π/4 به دست آمده است. دلیل آن عدم همپوشانی بین تصاویر تنها با تغییر زاویه افقی و دو تصویر عمودی است. در این حالت، یک FoV از تصاویر π/2 × π/2 هیچ همپوشانی در فاز تطبیق ایجاد نمی کند، بنابراین باعث شکست در پردازش داده می شود.
روش تقسیم فرعی 21 تصویر ایجاد می کند که پرسپکتیو مرکزی هستند و می توانند برای تولید طرح ریزی مستطیل شکل مجددا استفاده شوند. پیش بینی های اصلی را می توان با استفاده از یک فرمول ریاضی بر اساس هندسه تصویری بازسازی کرد. در واقع، تبدیل بین دو تصویر سوراخ سوزنی که توسط یک دوربین چرخان به دست میآید، یک هموگرافی است [ 27 ]:
و
از آنجایی که هدف ثبت دو برجستگی مستطیلی شکل است که از یک موقعیت مشابه به دست آمده اند، هر دو پیش بینی در مجموعه ای از تصاویر قاب قرار می گیرند. سپس، دو برجستگی مستطیل شکل جدید با استفاده از یک فرمول تنظیم بسته نرم افزاری که قادر به جبران کمبود تراز است، تولید می شود. 42 تصویر به دست آمده از هر دو طرح در تنظیمات منفرد استفاده می شود تا عدم مطابقت پیکسل به پیکسل پیش بینی های اصلی را جبران کند.
تطبیق با عملگر تبدیل ویژگی ثابت مقیاس (SIFT) [ 28 ] به منظور استخراج مجموعه ای از ویژگی ها از تصاویر انجام می شود. همه توصیفگرها با الگوریتمهای سریعی مقایسه میشوند که میتوانند هزینه محاسباتی را کاهش دهند [ 29 ، 30 ]. در نهایت، نقاط تصویر تطبیق داده شده امکان تخمین پارامترهای ناشناخته را با یک تنظیم بسته بر اساس الگوریتم لونبرگ-مارکوارت [ 31 ] فراهم میکنند.]. در طول فرآیند دوخت، جبران اعوجاج شعاعی اعمال نمی شود، زیرا تصاویر تولید شده از طرح ریزی مستطیل شکل بدون اعوجاج هستند. روش های بهبود می توانند تفاوت های رادیومتری بین تصاویر متوالی را کاهش دهند. جبران سود برای کاهش اختلاف شدت بین تصاویر همپوشانی اعمال می شود. سپس، یک الگوریتم چند ترکیبی، لبههای تصویر باقیمانده را حذف میکند و از تار شدن جزئیات با فرکانس بالا جلوگیری میکند.
اگر دوربین در همان نقطه با دقت میلی متری تعویض شود، این روش می تواند عدم تراز را جبران کند. تغییر موقعیت در همان نقطه یک اثر اختلاف منظر بین دو مجموعه عکس قاب ایجاد می کند که می تواند به عنوان یک تغییر سه بعدی مرکز پرسپکتیو تصاویر فریم جدید در نظر گرفته شود. پس از تخمین پارامترهای تصویر در یک تنظیم واحد، پیشبینیهای جدید مستطیل شکل با استفاده از یک سیستم مرجع مشترک تولید میشوند.
4.2. با دنباله ای از تصاویر چند زمانی آزمایش کنید
شکل 14 ابزار ویژه ای را نشان می دهد که برای جابجایی دقیق استفاده می شود که یک سه پایه نقشه برداری است که در همان نقطه قرار گرفته است. دوربین 360 درجه در بالای سه پایه نصب شده بر روی سه پایه نصب می شود و مرکز طرح ریزی در جهت عمودی از طریق نقطه ای که روی زمین مشخص شده است، تراز می شود. مزیت tribrach اپتیکال این است که امکان تغییر موقعیت دوربین در همان نقطه را فراهم می کند. همچنین اندازه گیری ارتفاع ابزار به گونه ای مهم است که سه پایه ممکن است در دوره های اندازه گیری مختلف با خطای محدود در حد 2-3 میلی متر تنظیم شود.
این آزمایش در فضای باریکی در امتداد پلکان یک ساختمان تاریخی انجام شد. ساختمان دارای چندین فرسودگی است که عمدتاً لایه برداری برای منطقه در نظر گرفته شده است.
دو برجستگی مستطیل شکل در زمانهای مختلف بهدست آمد که تصاویر شکل 15 به دست آمد.. هر دو پیش بینی به 21 تصویر فریم تقسیم شدند و مجموعه داده ورودی برای روند ثبت بر اساس تنظیم بسته نرم افزاری تصاویر به دست آمده با یک دوربین چرخان به دست آمد. استفاده از سیستم تغییر موقعیت به کاربران اجازه می دهد تا خطای باقیمانده 2-3 میلی متر را در مراکز پرسپکتیو دریافت کنند. آمار تنظیم حداقل مربعات منجر به عدم تراز 2± پیکسل شد که عمدتاً به دلیل عدم تراز کامل، همانطور که انتظار می رفت، ایجاد می شود. از سوی دیگر، چنین خطایی مطمئناً برای تشخیص تغییرات بصری قابل قبول است، به عنوان مثال، عملیات اصلی انجام شده توسط اپراتورهایی که علاقه مند به ارزیابی تغییرات رخ داده از دنباله ای از طرح ریزی متقابل مستطیلی چند زمانی هستند.
محیط مجازی ( شکل 16 ) در قالب HTML موجود است به طوری که از طریق یک مرورگر وب قابل دسترسی است، نه تنها محدود به رایانه های شخصی، بلکه در دستگاه های تلفن همراه مانند تلفن و تبلت قابل دسترسی است. این بدان معنی است که می توان از آن به طور مستقیم در محل استفاده کرد و فرصتی را برای بازرسی ساختار نه تنها در دفتر ارائه می دهد. یک نوار کشویی نیز برای انتقال صاف بین تصاویر مختلف در دسترس است. تصاویر در لایه های مختلف قرار می گیرند تا کاربر بتواند تصاویر خاصی را فعال کرده و تغییرات ایجاد شده را تجزیه و تحلیل کند. این به کاربر اجازه می دهد تا تصاویر به دست آمده در دوره های مختلف را بررسی کند و تغییرات رخ داده را آشکار کند.
بازرسی در محیط مجازی رشد اثر لایه برداری را به ویژه برای ناحیه روی سقف نشان داده است. چند قطعه جدا شده نیز روی زمین نشان داده شده است. لایه برداری جزئی نیز بر روی دیواره های جانبی نشان داده شده است. استفاده از تصاویر متعدد به دست آمده در دوره های مختلف نشان داده است که شرایط زوال پایدار است.
این مدل همچنین می تواند در دستگاه های واقعیت مجازی ادغام شود. در واقع، پیش بینی های مستطیل شکل یک رابطه قوی با واقعیت مجازی دارند [ 32 ]. در این کار، مورد نشان داده شده در شکل 16با موفقیت صادر و در چندین راه حل آزمایش شد، از جمله Google Cardboard، VR Box، Oculus Rift و Samsung Gear VR. فرصت شبیهسازی بینایی انسان (با وجود اینکه تجسم در حال حاضر به یک نقطه محدود میشود) یک روش جدید برای اجرای عملیات سنتی برای مواد، فنآوریهای ساختمانی و ارزیابی خرابی است. کار آینده شامل گسترش به چندین مکان قابل دسترسی در همان پروژه ها و همچنین پیاده سازی برخی ابزارها برای انجام ارزیابی بصری در محیط مجازی خواهد بود. این امر مستلزم ادغام عملیات نقشه برداری بر اساس کنترلرهای لمسی است که در حال حاضر در بازار تجاری موجود هستند.
پس از جمع آوری تصاویر با دوربین 360 درجه، ایجاد محیط مجازی با استفاده از 3DVista Pro انجام می شود. این نرم افزار به فرد اجازه می دهد تا تورهای واقعیت مجازی را بر اساس پانوراما تولید کند، که چندین دیدگاه را شبیه سازی می کند، مانند مورد مشاهده کننده “ایستا”. در واقع، پیمایش مجازی چرخش دیدگاه است، بدون فرصت جهت یابی آزادانه در صحنه (ترجمه). زمانی که یک مدل سه بعدی کامل در دسترس باشد، ناوبری کامل امکان پذیر است.
یک نوار کشویی به کاربر این امکان را می دهد که تجسم را بین تصویر اصلی، تصویر با اطلاعات اضافی در مورد فناوری های ساخت و ساز، یا تصویر با اطلاعاتی در مورد ارزیابی وضعیت و توضیحات آسیب شناسی حرکت دهد. انتخاب عناصر خاص پنجرههای اضافی را فراهم میکند و فایلهای دیگری را نشان میدهد که میتوانند مستقیماً در تور مجازی دانلود، چاپ یا استفاده شوند.
این روش همچنین میتواند اطلاعات اضافی را از نظر تصاویر کروی جدید (به عنوان مثال، تصاویری که در دورههای مختلف برای تجزیه و تحلیل تغییرات رخ داده به دست آمدهاند) یا اطلاعاتی از نظر توضیحات، عکسهای خارجی، فیلمها، نقشههای جدید، نمودارها، پیوندهای وب، ترکیب کند. ، و غیره.
5. نتیجه گیری ها
این مقاله چند مثال و کاربردهای نگاشت شرایط را با تصاویر 360 درجه شرح داد. این گونه تصاویر در زمینه مرمت و حفظ بناهای تاریخی ناشناخته مانده است. همچنین، فقدان نرم افزار تجاری قادر به انجام برخی از وظایف شرح داده شده در مقاله، نیازمند اجرای روش های جدید برای تبدیل تصاویر 360 درجه به محصولات متریک است.
اندازه گیری مناطق دقیق از تصاویر 360 درجه یک راه حل امیدوارکننده برای فضاهای کوچک و باریک است که در آن پروژه بازسازی به بسیاری از تصاویر فریم سنتی نیاز دارد. یک پروژکتور 360 درجه را می توان تقسیم و پردازش کرد تا مجموعه ای از تصاویر تصحیح شده تولید شود که از طریق آن می توان مناطق زوال را شناسایی و اندازه گیری کرد. در مورد عناصر معماری نامنظم که دارای هندسه سه بعدی هستند، می توان تصاویر کروی را برای تولید مدل های سه بعدی دقیق با یک فرمول تنظیم بسته نرم افزاری بر اساس مدل دوربین کروی پردازش کرد. سپس، ارتفتوهای دیجیتالی، محصولات تحویلی پروژه را برای نقشه برداری زوال ارائه می کنند.
در نهایت، یک روش جدید برای ارزیابی بصری بر اساس مجموعه ای از تصاویر کروی چند زمانی ارائه و مورد بحث قرار گرفت. چنین تصاویری می توانند کل صحنه اطراف دوربین را ثبت کنند و یک ابزار نقشه برداری کارآمد و سریع برای ارزیابی بصری و متریک هستند.
در دسترس بودن رو به رشد دوربین های 360 درجه ارزان قیمت به الگوریتم های جدیدی نیاز دارد که قادر به ارائه کارآمد اطلاعات متریک، فراتر از اهداف تجسم سنتی هستند. فتوگرامتری کروی همراه با روش های تجسم کارآمد جدید می تواند نقش مهمی در انواع کاربردهای واقعی، از جمله مورد ارزیابی مواد و شرایط ارائه شده در این مقاله داشته باشد.
کار آینده شامل توسعه الگوریتم هایی است که می توانند به تشخیص خودکار تغییرات کمک کنند. پس از ثبت مجموعه ای از پیش بینی های مستطیل شکل، از روش های توسعه یافته در زمینه سنجش از دور می توان برای آشکار کردن تغییرات رخ داده استفاده کرد. هنوز برای شناسایی قابل اعتماد تغییرات و همچنین برای آن قسمتهایی در تصاویر که در برجستگیهای مستطیل شکل (مثلاً کف و سقف) بسیار تحریف شدهاند، کار تحقیقاتی مورد نیاز است.















بدون دیدگاه