

خلاصه
بازسازی مدل محیط داخلی به عنوان یک کار مهم و چالش برانگیز از نظر ارائه یک مدل داخلی داخلی غنی از لحاظ معنایی و هندسی دقیق ظاهر شده است. اخیراً تحقیقات زیادی در رابطه با بازسازی محیط داخلی انجام شده است. بنابراین، این مقاله به بررسی تکنیکهای پیشرفته برای بازسازی سهبعدی (3D) محیطهای داخلی میپردازد. ابتدا، برخی از مجموعه دادههای معیار موجود برای بازسازی سهبعدی محیطهای داخلی توصیف و مورد بحث قرار میگیرند. سپس جمعآوری دادههای فضاهای داخلی سه بعدی به اختصار خلاصه میشود. علاوه بر این، یک مرور کلی از بازسازی هندسی، معنایی و توپولوژیکی محیط داخلی ارائه شده است که در آن روشها، مزایای موجود، و معایب این سه نوع بازسازی تحلیل و خلاصه می شود. در نهایت، جهتهای تحقیقاتی آینده، از جمله چالشها و گرایشهای تکنیک، به منظور ارتقای علاقه پژوهشی آینده مورد بحث قرار میگیرند. می توان نتیجه گرفت که اکثر روش های بازسازی محیط داخلی موجود بر اساس فرضیه قوی منهتن است که ممکن است در یک محیط داخلی واقعی درست نباشد، بنابراین اثربخشی و استحکام روش های بازسازی محیط داخلی موجود را محدود می کند. علاوه بر این، بر اساس ساختارهای هرمی سلسله مراتبی و پارامترهای قابل یادگیری معماری های یادگیری عمیق، طرحهای مشترک چند وظیفهای برای به اشتراک گذاشتن پارامترها و بهینهسازی مشترک یکدیگر با استفاده از اطلاعات اضافی و مکمل از دیدگاههای مختلف، پتانسیل خود را برای بازسازی سهبعدی محیطهای داخلی نشان میدهند. علاوه بر این، ادغام یکپارچه فضای داخلی و خارجی برای دستیابی به یک نمایش کامل از ساختمانهای داخلی و خارجی نیز به شدت مورد تقاضا است.
کلید واژه ها:
محیط داخلی ؛ مدل سازی هندسی ; مدلسازی معنایی ; مدل سازی توپولوژیک ; بازسازی صحنه
1. معرفی
بر اساس تحقیقات آژانس حفاظت از محیط زیست، بیش از 75 درصد از جمعیت در سراسر جهان در شهرها و شهرها زندگی می کنند و تقریبا 90 درصد از وقت خود را در ساختمان ها می گذرانند [ 1 ]. انسان ها معمولاً بسیاری از فعالیت های داخلی مربوط به کار، خرید، اوقات فراغت، غذاخوری، ورزش و غیره را انجام می دهند. برای تسهیل این فعالیت های انسانی، یک عامل ضروری، در دسترس بودن نمایش اطلاعات فضایی داخلی برای برآوردن نیازهای کاربردهای مختلف است. علاوه بر این، با افزایش جمعیت شهری و رواج ساختمانهای بزرگ (به عنوان مثال، فرودگاهها، ایستگاههای قطار، مراکز خرید و بیمارستانها) در جامعه کنونی، تقاضای فزایندهای برای چیدمانهای فضایی بهروز در داخل ساختمان وجود دارد. محیط ها [ 2] و اطلاعات مربوط به اشیاء موجود در آنها [ 3 ].
در سالهای اخیر، بازسازی سهبعدی (3D) محیطهای داخلی به عنوان یک کار مهم و چالش برانگیز [ 4 ] از نظر ارائه یک مدل داخلی غنی از لحاظ معنایی و هندسی دقیق ظاهر شده است. در واقع، برای بسیاری از کاربردها، مانند راهنمایی ناوبری [ 5 ]، مدیریت اضطراری [ 6 ]، برنامه ریزی تعمیر و نگهداری و نوسازی ساختمان [ 7 ] و طیف وسیعی از خدمات مبتنی بر مکان داخلی (مثلاً راه ) نیز اساسی است. یافتن، تحویل محتوای متنی) [ 8]. به عنوان مثال، افراد بدون هیچ تجربه داخلی میتوانند بخشهای مبلمان آنلاین را که مدلهای دیجیتال سهبعدی محصولات خود را ارائه میدهند، مرور کنند و با کمک کارشناسان یا سیستمهای خبره دیجیتال تصمیم بگیرند که چه چیزی بخرند [ 9 ]. علاوه بر این، مدلهای داخلی غنی از لحاظ معنایی و هندسی دقیق، اطلاعات حیاتی (مانند مکانهای درب مورد استفاده برای خروجیها، جهت باز شدن درها، مکانهای فضاهای داخلی و روابط توپولوژیکی آنها، و ویژگیهای معنایی فضاهای داخلی) را برای خدمات ناوبری داخلی فراهم میکنند [ 5 ].
تولید یک مدل فضای داخلی ابتدا به اجرای مناسب حسگرها نیاز دارد (به عنوان مثال، دوربین (تک چشمی [ 10 ]، استریو [ 11 ]، ویدئو [ 12 ]، یا پانوراما [ 13 ]، اسکن لیزری [ 14 ]، دوربین عمق [ 15 ]]، و غیره) برای جمع آوری داده های صحنه داخلی، که به مدل سازی دقیق کل صحنه داخلی کمک می کند و به کارایی مدل بازسازی شده در مراحل بعدی کمک می کند. به عنوان مثال، یک حسگر عمق ارزان قیمت، مانند مایکروسافت کینکت، می تواند برای دیجیتالی کردن و بازسازی سریع یک مدل سه بعدی داخلی با استفاده از جریان های عمق و تصاویر رنگی استفاده شود. علاوه بر این، سیستمهای اسکن لیزری زمینی یا متحرک به طور قابل توجهی پیشرفته هستند زیرا میتوانند به راحتی و به سرعت اطلاعات هندسی دقیق محیطهای داخلی را ضبط کنند. به دنبال این، یک الگوریتم مناسب برای بازسازی یک مدل فضای داخلی از داده های دریافتی مورد نیاز است. مدلسازی یک محیط داخلی را میتوان از مدلهای مش [ 16 ] و مدلهای هندسی طراحی به کمک رایانه (CAD) [ 17 ] نشان داد.] به مدل های پارامتری مبتنی بر شی [ 18 ، 19 ]. این مدل ها به طور کلی برای برآوردن نیازهای برنامه های مختلف بازسازی می شوند. به عنوان مثال، مدلسازی هندسی دیجیتال با هدف طراحی و شبیهسازی معماری ارائه شده است [ 20 ]. علاوه بر این مدل، اطلاعات مکانی یک ساختمان نیز توسط چندین استاندارد دادههای مکانی، مانند کلاسهای بنیاد صنعت (IFC) [ 21 ]، زبان نشانهگذاری جغرافیای شهر (CityGML) [ 22 ] و زبان نشانهگذاری جغرافیای داخلی تعریف و سازماندهی میشود. IndoorGML)، برای پشتیبانی از خدمات مبتنی بر مکان و سایر برنامه های داخلی.
با این حال، بر خلاف همتایان خود در فضای باز، بازسازی سه بعدی محیط های داخلی همچنان چالش های خاصی را به دلیل ماهیت چیدمان پیچیده ساختار داخلی، تعاملات پیچیده بین اشیا، درهم و برهمی و انسدادها ایجاد می کند [ 23 ]. به عنوان مثال، عدم پوشش دید، دستیابی به دادههای مربوط به دیوارها، کفها و سایر سازههای مورد علاقه را در طول جمعآوری دادهها دشوار میکند و منجر به نتایج بازسازی رضایتبخش نمیشود [ 24 ].]. مثال معمولی دیگر مشکل در بازیابی ساختارهای داخلی و روابط توپولوژیکی (به عنوان مثال، اتصال، مهار، یا مجاورت) بین آنها است. علاوه بر این، مناطق با بافت ضعیف (مانند دیوارها یا کفهای بدون ویژگی) معمولاً در محیطهای داخلی وجود دارند که باعث خطاهای اندازهگیری سازگاری عکس میشوند [ 25 ]. بدیهی است که نویز حسگر و نقاط پرت فرآیندهای بازسازی را پیچیده تر می کند. علاوه بر این، تفاوتهای عمده ظاهری، روشنایی و تغییرات دید در صحنههای مختلف، تولید خودکار و قوی یک مدل داخلی را بهشدت چالشبرانگیز میسازد.
برای مقابله با این چالش ها، روش های متعددی در سال های اخیر در رابطه با بازسازی سه بعدی محیط های داخلی توسعه یافته است. با این حال، این هنوز یک موضوع تحقیقاتی فعال در هر دو زمینه گرافیک کامپیوتری و بینایی کامپیوتر است. با جستجوی کلمات کلیدی در Web of Science، شکل 1خلاصه آمار انتشار مربوط به بازسازی سه بعدی محیط های داخلی را که دوره 2000 تا 2019 را پوشش می دهد. محلیسازی و نقشهبرداری همزمان (SLAM)، «تخمین طرحبندی»، «بخشبندی معنایی» و «توپولوژی». از سال 2010 به بعد، افزایش قابل توجهی در تعداد این گونه مطالعات را می توان مشاهده کرد که نشان دهنده اهمیت روزافزون این موضوع تحقیقاتی است. بنابراین، این مقاله مروری سیستماتیک از تکنیکهای بازسازی سهبعدی محیطهای داخلی را ارائه میکند. به دلیل اهمیت در توسعه بازسازی محیط داخلی، در بخش 2ابتدا شرح مختصری از برخی از مجموعه دادههای معیار موجود به منظور ارزیابی عملکرد الگوریتمهای مختلف ارائه میکنیم. سپس، فرآیند جمعآوری دادههای ویژگیهای فضای داخلی سهبعدی در بخش 3 توضیح داده میشود ، قبل از اینکه تجزیه و تحلیل دقیق و خلاصهای از مطالعات موجود مرتبط با بازسازی سهبعدی محیطهای داخلی در بخش 4 ارائه شود.، که با توجه به اصول ذاتی و الزامات کاربردی می توان آنها را به دسته های مختلفی تقسیم کرد. این بخش به جای تحلیل کمی، بر معرفی نظریه های مربوطه و همچنین مزایا و معایب آنها تمرکز دارد. در نهایت، یک بحث از ملاحظات تحقیقات آینده با نتیجه گیری های خودمان در مورد وضعیت هنر بازسازی سه بعدی محیط های داخلی به ترتیب در بخش 5 و بخش 6 ارائه شده است.
2. مجموعه داده های محک
مجموعه دادههای معیار نقش مهمی در تأیید عینی عملکرد و استحکام الگوریتمهای توسعهیافته دارند. تا به امروز، تعداد فزاینده ای از مجموعه داده های اختصاص داده شده به برنامه های مختلف در دسترس قرار گرفته اند که برای اندازه گیری وضعیت فعلی هنر اهمیت زیادی دارند. در این بخش، مجموعه دادههای معیار موجود بر اساس اهداف اولیه طبقهبندی میشوند و توضیحات مختصر مربوطه نیز ارائه میشود. لازم به ذکر است که بیشتر مجموعه دادههای معیار موجود برای چند کار ساخته میشوند، نه تنها برای یک کار خاص. علاوه بر این، تا جایی که ما میدانیم، هیچ معیاری برای ارزیابی کیفی و کمی مدلسازی توپولوژیکی وجود ندارد، اگرچه روشهای متعددی برای نشان دادن روابط توپولوژیکی توسعه داده شدهاند.
2.1. مجموعه دادههای معیار مدلسازی هندسی
2.1.1. امپریال کالج لندن و دانشگاه ملی ایرلند مینوث (ICL-NUIM)
مجموعه دادههای امپریال کالج لندن و دانشگاه ملی ایرلند Maynooth (ICL-NUIM) [ 26 ] از توالیهای دوربین RGB-D دستی («D» به کانال «عمق» یا «فاصله» اشاره دارد) برای ارزیابی فاصلهسنجی بصری، 3 بعدی جمعآوری شده است. بازسازی، و الگوریتمهای SLAM، که نه تنها اطلاعات ژست دوربین را برای هر فریم ارائه میدهند، بلکه کاربر را قادر میسازد تا دقت نقشه نهایی یا بازسازی سطح تولید شده را به طور کامل تعیین کند.
2.1.2. دانشگاه فنی مونیخ (TUM)
مجموعه داده دانشگاه فنی مونیخ (TUM) [ 27 ] حاوی تصاویر RGB و عمقی است که با استفاده از مایکروسافت کینکت گرفته شده است. 39 دنباله تصویر در یک محیط اداری و یک سالن صنعتی ضبط میشوند و مسیر حقیقت زمینی متناظر برای ارزیابی وظایفی مانند فاصلهسنجی بصری و SLAM ارائه شده است. این مجموعه داده طیف وسیعی از صحنهها و دوربینها را برای ارزیابی موقعیتهای خاص (مثلاً حرکت آهسته، مسیرهای طولانیتر با یا بدون تشخیص بسته شدن حلقه) پوشش میدهد.
2.1.3. چالش رباتیک اروپا (EuRoc)
مجموعه داده چالش رباتیک اروپا (EuRoC) [ 28 ] شامل 11 توالی استریو است که سه محیط مختلف را پوشش می دهد: دو اتاق داخلی و یک صحنه صنعتی. با توجه به سرعت پرواز، شرایط نوری و شرایط بافت پهپاد، مجموعه داده های مختلفی ارائه شده است. هر مجموعه داده یک قاب تصویر کامل و دادههای واقعی واقعی و همچنین پارامترهای مهم برای ثبت اطلاعات داخلی دوربین و سایر حسگرها را ارائه میدهد.
2.1.4. نقشه برداری و موقعیت داخلی چند حسی (MiMAP)
معیار انجمن بینالمللی فتوگرامتری و سنجش از دور (ISPRS) در نقشهبرداری و موقعیت داخلی چندحسی (MiMAP) اولین مجموعه دادهای است که وظایف متعدد تشخیص نور و محدوده (LiDAR) مبتنی بر SLAM، مدل اطلاعات ساختمان (BIM) استخراج ویژگی را به هم مرتبط میکند. و موقعیت یابی داخلی مبتنی بر گوشی هوشمند همه با هم [ 29]. این معیار شامل سه مجموعه داده است: یک مجموعه داده SLAM مبتنی بر LiDAR داخلی، یک مجموعه داده استخراج ویژگی BIM و یک مجموعه داده موقعیت یابی داخلی. هر صحنه در مجموعه داده حاوی ابرهای نقطهای از اسکنر لیزری چند پرتو، تصاویر دوربینهای لنز چشم ماهی، و سوابق حسگرهای گوشی هوشمند متصل در محیطهای داخلی با پیچیدگیهای مختلف است. پروژه MiMAP یک چارچوب مشترک برای ارزیابی و مقایسه SLAM مبتنی بر LiDAR، استخراج خودکار ویژگیهای BIM و موقعیتیابی چندحسی در فضای داخلی فراهم میکند.
2.1.5. معیار انجمن بین المللی فتوگرامتری و سنجش از دور (ISPRS) در مدل سازی فضای داخلی
معیار ISPRS در مجموعه دادههای مدلسازی داخلی [ 30 ] از چندین ابر نقطه (از جمله دانشگاه فنی برانشوایگ 1 (TUB1)، TUB2، آتشنشانی، Uvigo، دانشگاه ملبورن (UoM) و موزه گرینگر) تشکیل شده است که از حسگرهای محیطی مختلف در ایندو گرفته شدهاند. از پیچیدگی های مختلف برای امکان مقایسه عملکرد روش های مدل سازی داخلی.
2.2. مجموعه دادههای معیار مدلسازی معنایی
2.2.1. SUN RGB-D
مجموعه داده RGB-D Scene Understanding (SUN) [ 31 ] شامل 10335 تصویر RGB-D از چهار حسگر مختلف با حاشیه نویسی متراکم است، و همچنین شامل 146617 چند ضلعی دو بعدی (2D) و 64595 جعبه محدود کننده 3 بعدی، با جهت گیری دقیق شی است. همچنین یک چیدمان اتاق سه بعدی و دسته بندی صحنه برای هر تصویر. برای این مجموعه داده، نیمی از تصاویر به آموزش اختصاص داده می شود، در حالی که نیمی دیگر به آزمایش، به منظور ارزیابی طبقه بندی صحنه، تقسیم بندی معنایی، تشخیص اشیاء سه بعدی، شی گرایی، تخمین چیدمان اتاق و درک کلی صحنه.
2.2.2. اسکن نت
ScanNet [ 32 ] یک مجموعه داده ویدیویی RGB-D بزرگ با 2.5 میلیون فریم داده در 1513 صحنه است. این 1513 اسکن، 707 فضای مجزا را نشان میدهد، از جمله فضاهای کوچک مانند کمد، حمام، و اتاقهای ابزار، و فضاهای بزرگ مانند کلاسهای درس، آپارتمانها و کتابخانهها که با ژستهای دوربین سهبعدی، بازسازیهای سطحی و تقسیمبندی معنایی حاشیهنویسی شدهاند. این مجموعه داده به 1205 اسکن برای آموزش و 312 اسکن دیگر برای آزمایش تقسیم شده است.
2.2.3. عمق دانشگاه نیویورک (NYU).
مجموعه داده عمقی دانشگاه نیویورک (NYU) متشکل از توالی های ویدئویی از صحنه های مختلف داخلی است. NYU depth v1 [ 33 ] و v2 [ 34 ] به ترتیب در سالهای 2011 و 2012 معرفی شدند که هر دو با استفاده از کینکت مایکروسافت گرفته شدند. برای NYU depth v1، 64 صحنه مختلف داخلی، 7 کلاس در سطح صحنه، و 2347 فریم برچسب متراکم وجود دارد که به 60٪ برای آموزش و 40٪ برای آزمایش تقسیم می شوند. NYU depth v2 شامل 1449 تصویر RGB-D است که 464 صحنه مختلف داخلی را در 26 کلاس سطح صحنه توصیف می کند، و حاشیه نویسی دقیق برای هر تصویر ارائه شده است. این مجموعه داده به 795 تصویر برای آموزش و 664 تصویر برای آزمایش تقسیم شده است.
2.2.4. مجموعه داده معنایی دو بعدی-سه بعدی (2D-3D) استانفورد
مجموعه داده 2D-3D-Semantic Stanford [ 35 ] یک مجموعه داده فضای داخلی در مقیاس بزرگ را ارائه می دهد، که داده های 2D، 2.5D و 3D را با حاشیه نویسی های معنایی و هندسی سطح نمونه می گیرد. مجموعه داده در شش منطقه داخلی در مقیاس بزرگ، شامل سه ساختمان مختلف با کاربری آموزشی و سه ساختمان اداری، که بیش از 6000 متر مربع را پوشش می دهد و شامل 70000 تصویر RGB، همراه با عمق های مربوطه، سطح عادی، حاشیه نویسی های معنایی، جمع آوری شده است. تصاویر جهانی XYZ و اطلاعات دوربین.
2.2.5. Matterport3D
Matterport3D [ 36 ] مجموعه داده RGB-D بزرگ و متنوعی را برای محیط های داخلی ارائه می دهد. این شامل 10800 نمای پانوراما از 194400 تصویر RGB-D است که صحنه های داخلی 90 ساختمان را توصیف می کند. برخلاف سایر مجموعههای داده، شامل هر دو پانورامای عمقی و رنگی 360 برای هر دیدگاه است که توسط بازسازیهای سطحی، ژستهای دوربین و تقسیمبندیهای معنایی دوبعدی و سهبعدی حاشیهنویسی میشود. هم ترازی جهانی دقیق و نماهای پانورامای جامع و متنوع در کل ساختمان ها تطبیق نقاط کلیدی، پیش بینی همپوشانی دید، پیش بینی عادی از رنگ، تقسیم بندی معنایی و طبقه بندی منطقه را امکان پذیر می کند.
3. جمع آوری داده ها از فضاهای داخلی 3 بعدی
امروزه راه های زیادی برای جمع آوری یا به دست آوردن داده های سه بعدی فضاهای داخلی وجود دارد. در این قسمت سه روش زیر را خلاصه می کنیم: تخمین عمق تک نمای، تخمین عمق چند نمای و SLAM. باید توجه داشت که تعداد فزایندهای از روشها یا حسگرهای جمعآوری داده (مانند رادار [ 37 ]) برای کاربردهای مختلف داخلی در حال ظهور هستند.
3.1. تخمین عمق تکنما
هدف اصلی تخمین عمق تخمین مستقیم عمق پیکسل های تصویر برای انعکاس صحنه سه بعدی واقعی مشاهده شده در یک تصویر است. تخمین عمق تک نمای اجازه می دهد تا اطلاعات عمق را تنها با استفاده از یک تصویر تک چشمی بازیابی کنید [ 38 ]. کلمات کلیدی جستجو شامل ترکیبی از «تخمین عمق تصویر/نما»، «تخمین عمق تک چشمی» و «محوطه/محیط داخلی» بود. شکل 2 آمار انتشار مربوط به تخمین عمق تک چشمی را فهرست می کند. به خوبی شناخته شده است که بافت فضایی معمولاً برای رمزگذاری روابط بین موجودیت های همسایه برای تضمین سازگاری فضایی در سراسر تصاویر معرفی می شود. برای معرفی بافت فضایی، لیو و همکاران. [ 39] یک مدل گرافیکی گسسته-پیوسته ایجاد کرد که در آن عبارت داده بر اساس نقشه عمق کاندید بازیابی شده تعریف شد، در حالی که عبارت صاف با استفاده از روابط انسداد بین سوپرپیکسلهای همسایه ساخته شد. بدون هیچ مقدمه اضافی، Zhuo [ 40 ] لایههای سوپرپیکسل، منطقه و طرحبندی را در یک چارچوب سلسله مراتبی سازماندهی کرد، جایی که اطلاعات محلی، سطح متوسط و سطح بالا تحت مدل میدان تصادفی شرطی، با اولیه کدگذاری میشد. هدف از تخمین عمق از یک تصویر تک چشمی
برخلاف کار قبلی که از ویژگیهای دست ساز با اطلاعات قبلی استفاده میکرد، تکنیکهای یادگیری عمیق عملکرد برتر را در نمایش ویژگی برای تخمین عمق نشان میدهند. ادر و همکاران [ 41 ] یک شبکه عصبی کانولوشن را ایجاد کرد که در آن انحنای اصلی برای تخمین مشترک عمق متراکم، نرمال سطح و مرزها از یک تصویر همهجهت واحد ادغام شد. روی و همکاران [ 42 ] یک شبکه عصبی کانولوشنال و جنگل های رگرسیون را ترکیب کرد، که در آن نتایج رگرسیون فردی در یک تخمین عمق نهایی، بر اساس یک تصویر تک چشمی ادغام شدند. بدون در نظر گرفتن اطلاعات قبلی، لیو و همکاران. [ 43] به طور مشترک هم یک میدان تصادفی شرطی پیوسته و هم یک شبکه عصبی کانولوشنال عمیق را برای انجام تخمین عمق از یک تصویر منفرد اتخاذ کردند.
3.2. تخمین عمق چند نما
تخمین عمق چند نمای، تصاویر چند نما را از دوربینهای کالیبره یا کالیبره نشده جمعآوری میکند تا یک نمایش سهبعدی متراکم از صحنه را بر اساس پارامترها و ژستهای دوربین بازسازی کند، که همیشه یک موضوع داغ در جوامع فتوگرامتری و بینایی کامپیوتری بوده است. با جستجوی کلمات کلیدی در Web of Science، شکل 3 خلاصه ای از آمار انتشار مربوط به تخمین عمق چند نمای را در بازه زمانی 2000 تا 2019 نشان می دهد. “استریو چند نمای.”
شکل 4 نمونه ای از بازسازی چند نمای با دوربین های کالیبراسیون چندگانه را نشان می دهد. با توجه به تصاویر کالیبرهشده و هندسه بازسازیشده، میتوان یک نقشه بافت با وضوح فوقالعاده بر اساس مدلهای هندسه سهبعدی از تصاویر متعدد تخمین زد [ 44 ]. این روش مدلهایی با بافت بهتر با سطح جزئیات بالاتر نسبت به مدلهای مبتنی بر یک تصویر تولید میکند.
با این حال، تراز تصویر به راحتی بر کیفیت نقشه بافت تأثیر می گذارد و حجم محاسبات به طور قابل توجهی با تعداد تصاویر ورودی افزایش می یابد. علاوه بر الگوریتم کلاسیک تنظیم بسته نرم افزاری، روش های استریو چند نمای سنتی بر محاسبه حجم جابجایی صفحه و بهینه سازی توابع خطای فتومتریک برای اندازه گیری شباهت بین وصله ها برای تخمین عمق تمرکز می کنند. کالینز و همکاران [ 45 ] یک روش ساده جاروب هواپیما را برای منظم کردن متوالی حجم هزینه پیشنهاد کرد. فوروکاوا و همکاران [ 46 ] یک الگوریتم استریو چند نمای را با معرفی قوام نورسنجی محلی و محدودیتهای دید جهانی برای تولید یک نقشه عمق متراکم ارائه کرد. گالیانی و همکاران [ 47] به صورت تکراری، عمق سه بعدی و میدان معمولی در هر دید را برای به حداکثر رساندن معیار سازگاری عکس تعریف شده برای ایجاد تطابق چند نمای با کیفیت بالا، منتشر و اصلاح میکند. علاوه بر این، اطلاعات تکمیلی دیگری به منظور افزایش عملکرد به روند بازسازی اضافه شده است. به عنوان مثال، Langguth و همکاران. [ 48 ] انرژی شکل گیری از سایه را به رویه بهینه سازی بازسازی معرفی کرد. بر اساس فرض منهتن، لانگگوث و همکاران. [ 48 ] همچنین از میدان تصادفی مارکوف برای انجام بهینهسازی مبتنی بر فرضیه صفحه برای بهبود عملکرد بازسازی، بهویژه در مناطق با بافت ضعیف استفاده کرد. هانه و همکاران [ 49] تقسیم بندی معنایی و بازسازی متراکم به طور مشترک انجام می شود، که در آن اولی قادر به ارائه اطلاعات در مورد احتمال جهت سطح است و دومی می تواند احتمال کلاس معنایی را ارائه دهد. تکنیک ساختار از حرکت (SfM) [ 50 ]، به عنوان یک نوع تخمین عمق چند نمای، یک روش بازسازی موفق است که از اطلاعات RGB استفاده می کند. اکثر سیستمهای SfM برای مجموعههای تصاویر نامرتب افزایشی هستند، با چند تصویر شروع میشوند، ویژگیهای مکرر را بین دو تصویر تطبیق میدهند، تصاویر منطبق را اضافه میکنند، تطابق ویژگیها را مثلث میکنند و بهینهسازیهایی را برای اصلاح وضعیتهای دوربین انجام میدهند.
درست مانند سایر برنامهها، تکنیکهای یادگیری عمیق نیز عملکرد برتر خود را در تخمین عمق چند نمای نشان دادهاند. در سالهای اخیر، شبکههای عصبی کانولوشنال برای اندازهگیری شباهت بین وصلهها [ 51 ] معرفی شدهاند. جی و همکاران [ 52 ] یک چارچوب یادگیری استریو چند نمای سرتاسری ایجاد کرد که به طور مستقیم هم سازگاری عکس و هم روابط ساختار هندسی سطوح را یاد میگیرد. هوانگ و همکاران [ 53 ] از یک شبکه عصبی کانولوشن عمیق برای جمعآوری اطلاعات از مجموعهای از حجمهای از پیش تولید شده برای بازسازی استریو چند نما استفاده کرد. یائو و همکاران [ 54] یک معماری استریو چند نمای سرتاسری برای تخمین عمق ایجاد کرد، که در آن مشکل بازسازی با تعیین حجم هزینه به تخمین عمق در هر دید جدا می شود. برای پرداختن به مصرف حافظه که اثر قبلی [ 53 ] از نظر بازسازی صحنه های با وضوح بالا از آن رنج می برد، یائو و همکاران. [ 55 ] همچنین یک چارچوب استریوی چند نمای مبتنی بر شبکه عصبی تکراری را با تنظیم حجم هزینه به روشی متوالی طراحی کرد.
3.3. مکان یابی و نقشه برداری همزمان (SLAM)
یک چارچوب کلی تر به عنوان نسخه بلادرنگ تکنیک SfM، روش SLAM [ 56 ] است، که در آن یک سیستم نقشه برداری حرکت را از یک مکان ناشناخته در یک محیط ناشناخته شروع می کند تا موقعیت های خود را با توجه به محیط اطراف در طول حرکت تخمین بزند. در حالی که از موقعیت های خود برای ساختن یک نقشه افزایشی استفاده می کند. SLAM فرآیند گرفتن و بازیابی ساختارهای هندسی کل صحنه با استفاده از فعال (به عنوان مثال، سنسور لیزری [ 57 ] و دوربین های عمق [ 58 ]) یا غیرفعال (به عنوان مثال، تک چشمی [ 59 ] و استریو دوچشمی [ 60 ]) است. تکنیک های حس کردن شکل 5پس از جستجوی کلمات کلیدی در وب آو ساینس، آمار انتشار مربوط به SLAM را که از سال 2000 تا 2019 را پوشش می دهد، خلاصه می کند. کلمات کلیدی جستجو شامل ترکیبی از “صحنه داخلی، محیط داخلی، بازسازی، محلی سازی و نقشه برداری همزمان (SLAM)” بود. علاوه بر این، با توجه به نوع حسگر، چندین مجموعه داده عمومی با داده های حقیقت زمینی (به عنوان مثال، ICL-NUIM، TUM، EuRoC) برای ارزیابی عملکرد روش های مختلف منتشر شده است. لئونارد و وایت [ 61 ] در ابتدا یک سیستم SLAM به نام فیلتر کالمن گسترده (EKF)-SLAM را توسعه دادند، که در آن روش احتمالی برای کاهش اثر سنسورهای نادرست استفاده شد و این سیستم به پیاده سازی استاندارد تبدیل شده است.
پس از یک دوره توسعه بیش از 30 سال، SLAM بصری به نتایج قابل توجهی دست یافته است، به ویژه با ظهور Oriented FAST و Rotated BRIEF (ORB)-SLAM2، که سیستم SLAM بصری سنتی را به اوج خود رسانده است. با این حال، هنگامی که سیستمهای SLAM مبتنی بر تک ویژگی در صحنههای با بافت پایین استفاده میشوند، عملکرد موقعیتیابی و نقشهبرداری آنها اغلب کاهش مییابد. SLAM بصری مدرن به تدریج به روشی چند ویژگی، چند حسگر و مبتنی بر یادگیری عمیق تبدیل شده است. بر خلاف راه حل ORB-SLAM، فاصله سنج تصویری تک چشمی نقطه ای خط نیمه مستقیم (PL-SVO) [ 62] بر اساس ویژگیهای نقطه-خط توسعه داده شد، جایی که تخمین حالت افزایشی انجام میشود و حداقل خطای بازپرداخت غیرخطی ویژگیهای نقطه-خط به طور مشترک برای دستیابی به تخمین حرکت دوربین استفاده میشود. علاوه بر این، یک سیستم دوچشمی Point-Line-SLAM کامل (PL-SLAM) نیز توسعه داده شد که بر روی PL-SVO [ 62 ] ساخته شد. بر اساس سیستم ORB-SLAM، Pumarola [ 63 ] ویژگی های خطی را برای طراحی نقطه تک چشمی و خط SLAM که یک مدل ردیابی می سازد، گنجانده است. گومز و همکاران [ 62 ] سنجیدن خطاهای ویژگی های مختلف را با توجه به ماتریس کوواریانس آنها به صورت تطبیقی پیشنهاد کرد. علاوه بر خطای بازپرداخت سنتی نقاط پایانی برای ایجاد یک مدل تخمین گاوس-نیوتن با به حداقل رساندن مشاهده زاویه، وانگ و همکاران. [64 ] پیشنهاد تنظیم نسبت وزن نقاط و خطوط بر اساس تخمین باقیمانده های حالت دوربین. SLAM معنایی ویژگیهای تصویر را به سطح شی ارتقا میدهد و درک محیط اطراف را فراهم میکند. در ترکیب با روشهای یادگیری عمیق در حال ظهور، نتایج تقسیمبندی معنایی و تشخیص هدف میتواند اطلاعات سطح بالاتری را در اختیار SLAM قرار دهد. اخیراً، محققان از روش بیشینه سازی انتظارات (EM) استفاده کرده اند [ 65]، و همچنین روش های مختلف تشخیص شی پویا، برای حذف شی پویا. در نتیجه، ارتباط داده ها از طریق مدل احتمال انجام می شود، جایی که اشیاء شناسایی شده در تصویر به درستی به اشیاء سه بعدی که از قبل در داده های نقشه وجود دارند نگاشت می شوند، بنابراین نتایج قوی تری ایجاد می شود.
4. مروری بر روش تحقیق برای بازسازی سه بعدی محیط های داخلی
این بخش پیشرفت در زمینه مدلسازی محیط داخلی را پوشش میدهد که با توجه به هدف مدلسازی میتوان آن را به سه بعد تقسیم کرد: مدلسازی هندسه، مدلسازی معنایی و مدلسازی توپولوژیکی. شکل 6تکنیک های موجود برای بازسازی سه بعدی محیط های داخلی را خلاصه می کند. هدف اصلی مدلسازی هندسه بازیابی کامل هندسه سهبعدی محیط داخلی، از جمله مدلسازی عناصر ساختاری چند ضلعی (مانند دیوارها، کف، سقف، درها، پنجرهها)، تخمین چیدمان اتاق، و مدلسازی بدون درز داخلی و خارجی است. این مدل های تولید شده را می توان بر اساس معیارها (به عنوان مثال، ICL-NUM، TUM، EuRoc، MiMAP، معیار ISPRS در مدل سازی داخلی) ارزیابی کرد. مدلسازی معنایی بر برچسبگذاری معنایی (مثلاً انواع شی) با استفاده از چارچوب یادگیری ماشینی یا یادگیری عمیق تمرکز دارد. مجموعه داده های رایج (به عنوان مثال، SUN RGB-D، ScanNet، عمق NYU، مجموعه داده معنایی 2D-3D-Stanford، Matterport3D) معمولاً به عنوان معیار برای تأیید نتایج تفسیر استفاده می شوند. مدلسازی توپولوژیک عمدتاً برای بازیابی روابط توپولوژیکی استفاده میشود (به عنوان مثال،
4.1. مدل سازی هندسه
4.1.1. مدل چند ضلعی ساختاری
تولید مدل های ساختمان سه بعدی کاربردهای گسترده ای در جامعه مهندسی معماری و ساخت و ساز دارد. با این حال، ایجاد دستی یک مدل سه بعدی چند ضلعی از مجموعه ای از پلان های طبقه، بی اهمیت است و به مهارت و زمان نیاز دارد. در حال حاضر، محققان در تلاش برای خودکارسازی بازسازی مدل های ساختمان های سه بعدی هستند. در این بخش، نشان داده شده است که یک مدل با ساختار چند ضلعی عمدتاً بر تعیین عناصر ساختاری (به عنوان مثال، دیوارها، سقفها و کف) یا ویژگیهای سطح دیوار (به عنوان مثال، پنجرهها و درها) تمرکز دارد. علاوه بر این، مجموعه داده های عمومی، مانند معیار ISPRS در مجموعه داده های بازسازی داخلی، به عنوان مجموعه داده های معیار استفاده می شود و یک چارچوب ارزیابی مشترک برای مقایسه عملکرد روش های مختلف استفاده می شود.
برای طراحی و اصلاح یک ساختمان پیچیده معماری سه بعدی، نقشه های معماری دو بعدی اغلب ابزار مؤثرتری برای این منظور فراهم می کند. با اطلاعات معماری و معنایی، نقشه های معماری دو بعدی به عنوان منابع داده موثر برای بازسازی مدل های ساختمان های سه بعدی استفاده شده است. با این وجود، بیشتر نقشهها به شکل پلانهای طبقهای هستند که با استفاده از مجموعهای از نمادهای استاندارد شده در رابطه با عناصر معماری، پیشبینی املایی هر سطح ساختمان را به تصویر میکشند. بر اساس این واقعیت، برداری و تشخیص نماد نقش مهمی در بازسازی ایفا میکنند و روشهای متعددی که نقشههای معماری دوبعدی به عنوان ورودی برای تولید مدلهای سهبعدی مرتبط ارائه میشوند، توسعه یافتهاند. به عنوان مثال، So et al. [ 66] یک روش نیمه خودکار بازسازی مدل های ساختمان های سه بعدی مجازی را از نقشه های معماری دو بعدی توسعه داد تا کارایی فرآیند بازسازی دستی قبلی را بهبود بخشد. لو و همکاران [ 67 ] اطلاعات معماری را در نقشه های متعدد، معناشناسی و دانش قبلی برای بازسازی یک مدل ساختمان سه بعدی از نقشه های معماری دو بعدی ترکیب کرد. لی و همکاران [ 68 ] چارچوبی برای مشاهده تصاویر به منظور پیاده سازی تکنیک های مبتنی بر ادراک، و همچنین یک طرح زاویه محور برای طراحی تعاملی ارائه کرد. هورنا و همکاران [ 69 ] یک نمایش رسمی از محدودیت سازگاری برای بازسازی سه بعدی و مدل های توپولوژیکی مرتبط با آن را پیشنهاد کرد. لی و همکاران [ 70] یک بازسازی کارآمد از نقشه های معماری انجام داد، که در آن الگوریتم های تطبیق و طبقه بندی برای کاهش تعامل در طول بازسازی سه بعدی استفاده شد. اگرچه این روشها مبتنی بر نقشههای معماری دوبعدی ارائه شدهاند، اما اتوماسیون کامل برای تولید مدلهای ساختمانی سهبعدی از نقشههای معماری دوبعدی به دلیل ابهامات یا ناهماهنگیهای بازنماییهای معماری به دست نیامده است [ 71 ].
علاوه بر دیجیتالیسازی و اکستروژن از طرحهای معماری دوبعدی به مدلهای چند ضلعی سهبعدی، توسعه سیستمهای اسکن لیزری (به عنوان مثال، زمینی یا موبایل) و تکنیکهای فتوگرامتری با استفاده از تصاویر، راهحلهای عملی را برای ارائه محیطهای داخلی سه بعدی واقعی ارائه میدهد. روشهای موجود مربوط به مدلهای ساختار پارامتریک که مستقیماً از دادههای سه بعدی خام مشتق شدهاند، به طور کلی به روشهای استخراج عناصر ساختاری و روشهای تجزیه و بازسازی فضا تقسیم میشوند.
روشهای استخراج عناصر ساختاری معمولاً هنگام مدلسازی محیطهای داخلی پیچیده، از فرضیه قوی منهتن پیروی میکنند و صحنه داخلی را با استفاده از روشهای تحلیل معمولی [ 72 ]، روشهای مبتنی بر حداقل مربع [ 73 ]، روشهای رشد منطقه به سقف، دیوارها و کف تقسیم میکنند . 73 ، روشهای مبتنی بر اجماع نمونه تصادفی (RANSAC) [ 74 ]، و اجماع نمونهگیری بیزی مستقل از آستانه (BaySAC) [ 75 ]. شکل 7نمونهای از روش استخراج عناصر سازهای را نشان میدهد که میتوان آن را یک الگوی مدلسازی چند ضلعی ساختاری، شامل مرحله تشخیص سازه ساختمان و مرحله پارامتری (یا بردار) مرتبط در نظر گرفت. تحت فرض قوی منهتن، معماری اصلی ساختمانها شامل مجموعهای از اولیههای مسطح است که بینشهای کلیدی را در پشت اکثر روشهای استخراج عناصر ساختاری ارائه میدهد. با این حال، فرض منهتن ممکن است در محیط واقعی درست نباشد، بنابراین استفاده از این روش را محدود می کند. یونگ و همکاران [ 76 ] تشخیص هواپیما را با استفاده از الگوریتم RANSAC انجام داد و مرزها را برای استخراج طرح ردیابی کرد. وانگ و همکاران [ 77] اجزای ساختمان را با استفاده از الگوریتم رشد منطقه برای ساخت یک مدل اطلاعاتی شناسایی و طبقه بندی کرد. نینگ و همکاران [ 72 ] ساختارهای دیوار را بر اساس یک نوع معمولی شناسایی کرد و یک مدل سه بعدی را با استفاده از ساختارهای دیوار استخراج شده ایجاد کرد. برای تولید یک مدل پارامتری واقعی تر، پرویتالی و همکاران. [ 74 ] ابتدائیهای مسطح را با استفاده از تکنیک RANSAC اصلاحشده استخراج کرد، ابتدا ابتدائیهای مسطح استخراجشده را با استفاده از یک الگوریتم برش نمودار اصلاح کرد و در نهایت هم درها و هم پنجرهها را با استفاده از روش ردیابی پرتو برای تولید مدل CityGML یا IFC شناسایی کرد. بدون استفاده از اطلاعات قبلی، شی و همکاران. [ 78] با استفاده از ترکیبی از اطلاعات مختلف، تقسیم بندی سه بعدی را انجام داد و سپس طرح اتاق را برای تولید یک مدل سه بعدی معنایی بازسازی کرد. هانگ و همکاران به جای استخراج ساختارهای اصلی سه بعدی ساختمان ها. [ 79 ] ساختارهای دیوار اصلی در حوزه دو بعدی را برای استخراج مرز کف دوبعدی مدلسازی کرد، که سپس میتوان آن را با مدلسازی عمودی برای تولید یک مدل قاب سیمی سهبعدی از دادههای ابر نقطهای ترکیب کرد. برای تشخیص دقیق سازه های معماری اصلی، Michailidis و Pajarola [ 80] بر روی بازشوها (مثلاً پنجرهها و درها) استخراج صحنههای بهم ریخته و مسدود شده داخلی از ابرهای نقطهای با استفاده از روشهای برش نمودار بیزی متمرکز شده است. اخیراً، تحقیقاتی که بر موضوع طبقهبندی و برچسبگذاری اشیاء متمرکز شدهاند، عملکرد برتری را برای تکنیکهای یادگیری ماشینی و یادگیری عمیق نشان میدهند که پیشنیاز برای کاربردهای بعدی است. برخلاف روش های قبلی تشخیص مسطح برای استخراج سازه های اصلی ساختمان ها، وانگ و همکاران. [ 14 ] روشهای طبقهبندی معنایی را برای ایجاد چارچوبی مبتنی بر خط معنایی برای مدلسازی ساختمانهای داخلی، و استفاده از روش شبکههای متخاصم مولد شرطی برای بهینهسازی وضعیت انسداد ارائه کرد.
روشهای تجزیه و بازسازی فضا از دانش قبلی سازههای معماری داخلی استفاده میکنند و موضوع بازسازی صحنه را به یک مشکل تجزیه و بازسازی فضای داخلی فرموله میکنند تا به نتیجه بازسازی قویتری دست یابند. مشابه روشهای استخراج عناصر ساختاری، بیشتر روشهای تجزیه و بازسازی فضا نیز بر اساس فرضیه قوی منهتن انجام میشوند. با توجه به روشهای تجزیه و بازسازی فضا، واحدهای اتاق از دیدگاههای مختلفی تعریف میشوند. شکل 8 نمونه هایی از روش های تجزیه و بازسازی فضا را نشان می دهد [ 20]، که در آن واحدهای ساختمان (یعنی اتاق ها) به صورت جداگانه پارتیشن بندی و مدل سازی می شوند. اگرچه این روشهای تجزیه و بازسازی فضا، استحکام و عملکرد یا بازسازی را با تقسیم کردن فضاهای داخلی پیچیده به اتاقهای ساده منفرد بهبود میبخشند، کیفیت مدلهای سه بعدی نیز تحت تأثیر نتایج تقسیمبندی قرار میگیرد. اخیراً، موقعیت های اسکنر یا مسیر حرکت معمولاً اطلاعات مهمی را برای تقسیم بندی اتاق های جداگانه ارائه می دهند. مورا و همکاران با بهرهبرداری از دانش موقعیت اسکنر. [ 81 ] الگوریتم پارتیشن بندی فضا مبتنی بر دیوار کاندید را برای تقسیم خودکار اتاق های جداگانه انجام داد و هر اتاق را به عنوان یک مدل چند ضلعی سه بعدی مدل کرد. تانگ و همکاران [ 82] محیط داخلی را با استراتژی start-stop به چندین واحد تقسیم کرد و سپس ساختارهای اصلی معماری (به عنوان مثال، دیوارها، کف، سقف و پنجره ها) را از تصاویر RGB-D برای ایجاد مدل های داخلی سه بعدی غنی از لحاظ معنایی استخراج و مدلسازی کرد. استاندارد CityGML 3.0 اگرچه موقعیت های اسکنر یا مسیر حرکت عملکرد پارتیشن را افزایش می دهند، اما همیشه در دسترس نیستند. بدون استفاده از اطلاعات مهر زمانی، وانگ و همکاران. [ 83 ] یک چارچوب برچسبگذاری مبتنی بر برش نمودار برای بازسازی دیوارهای ساختاری از خطوط اولیه استخراجشده، و سپس بازسازی اتاقها برای تولید مدلهای پایه سهبعدی ارائه کرد. لی و همکاران برای تضمین یکپارچگی پارتیشن بندی فضا و نظم هندسی فضا. [ 84] یک روش مبتنی بر تقسیم بندی جامع برای بازسازی محیط داخلی چند طبقه ایجاد کرد، که در آن ساختمان های چند طبقه را می توان با استفاده از استراتژی اوج-نادیر-قله به چندین طبقه تقسیم کرد و هر طبقه را می توان به اتاق ها و راهروها تقسیم کرد. مشابه خط قبلی روش های مبتنی بر ابتدایی [ 83 ]، Pang و همکاران. [ 85 ] مرز فضایی و تفاوت بولی یکپارچه برای استخراج فضای داخلی برای تولید یک مدل داخلی با اطلاعات هندسی، معنایی و رابطه. به جای اینکه جهان منهتن را فرض کنیم، یانگ و همکاران. [ 20 ] با به حداقل رساندن تابع انرژی بر اساس فرمول میدان تصادفی مارکوف، محیط های داخلی پیچیده ای را با ساختارهای دیواری مستقیم و منحنی ساخت.
به طور خلاصه، راهحلهای مبتنی بر طراحی معماری دوبعدی موجود، خط لوله مشترکی برای تبدیل خودکار محیطهای دو بعدی به مدلهای سه بعدی دارند. با این حال، بیشتر نقشه های معماری به شکل پلان های طبقه با سطوح مختلف جزئیات و استفاده از نمادهای گرافیکی متفاوت است که منجر به ابهام یا ناهماهنگی در بازنمایی های معماری می شود. روشهای استخراج عناصر سازهای معمولاً از روشهای برازش مدل برای برازش اولیههای هندسی (مانند صفحات، استوانهها، کرهها و مخروطها) استفاده میکنند و سپس از آنها برای محاسبه تقاطعها و گوشهها استفاده میکنند [ 86 ]] که به راحتی تحت تاثیر صداها یا انسداد قرار می گیرد. در همین حال، روشهای تجزیه و بازسازی فضا، بازسازی صحنه را به یک مشکل تجزیه فضای داخلی فرموله میکنند و میتوانند در محیطهای داخلی درهم و برهم استفاده شوند. با این حال، مسائل بیش از حد بخشبندی که الگوریتمهای تقسیمبندی اتاق از آن رنج میبرند، باید در مرحله پس از پردازش بهینه شوند. همچنین، هر دو روش استخراج عناصر سازهای و روشهای تجزیه و بازسازی فضا عمدتاً بر سازههای معماری ساختمانها تمرکز دارند. علاوه بر ساختارهای معماری ساختمان ها، اشیاء داخلی نیز با استفاده از روش های بازیابی مدل مدل سازی می شوند [ 10 ، 18 ، 24 ، 87 ، 88 .] برای تولید مدلهای کاملتر صحنه داخلی. علاوه بر این، ارزیابی کمی در هندسه بین مدل مشتق شده و داده های حقیقت زمین برای مقایسه کیفیت هندسی مفید است [ 89 ].
4.1.2. تخمین چیدمان اتاق
بازسازی چیدمان اتاق یک محیط داخلی بر اساس تعیین مرزهای دیوارها، کف ها و سقف ها [ 90 ] است که اطلاعات زمینه ای سطح بالایی را در مورد صحنه (حتی در محیط های به هم ریخته) ارائه می دهد [ 91 ]. با این حال، از آنجایی که وجود درهم و برهم منجر به انسداد میشود، اکثر روشهای موجود عموماً مبتنی بر مفروضات هندسی ذاتی (مانند منهتن یا حتی طرحبندی جعبهشکل) هستند تا موقعیتهای گوشه یا مرزهای کلیدی را که چیدمان اتاق را مشخص میکنند، مشخص کنند. با توجه به دیدگاه های مختلف تخمین چیدمان، روش های موجود را می توان به روش های مبتنی بر ناحیه [ 92 ] (همانطور که در شکل 9 الف نشان داده شده است)، روش های مبتنی بر لبه [ 93 ] طبقه بندی کرد.] (همانطور که در شکل 9 ب نشان داده شده است)، روش های مبتنی بر نقطه کلید (گوشه) [ 94 ] (همانطور که در شکل 9 ج نشان داده شده است)، و روش های ترکیبی [ 95 ] (همانطور که در شکل 9 د نشان داده شده است). بدیهی است که این روش ها مبتنی بر دانش قبلی از محیط داخلی واقعی هستند و چیدمان صحنه ها را از دیدگاه های مختلف (یعنی منطقه، لبه، گوشه) تفسیر می کنند. با این حال، اکثر این روش ها تحت یک فرض هندسه قوی قرار می گیرند (به عنوان مثال، هندسه منهتن). برای چیدمان های پیچیده (مانند چیدمان های L شکل، دیوارهای منحنی)، این روش ها ممکن است قابل اجرا نباشند. در همین حال، مجموعه داده های عمومی، به عنوان مثال، NYU، SUN RGB-D، Stanford 2D-3D-Semantic مجموعه داده، به عنوان معیار برای ارزیابی این روش ها استفاده می شود.
روشهای مبتنی بر ناحیه معمولاً بر ویژگیهای هندسی مناطق محلی، مانند زمینه هندسی و نقشه جهت، برای تعیین جهت مکانی با استفاده از روش مبتنی بر نقطه ناپدید [ 96 ] (همانطور که در شکل 10 نشان داده شده است ) متکی هستند. سپس، طرح چیدمان بهینه از میان مجموعه ای از نامزدهای چیدمان انتخاب می شود. روش مبتنی بر نقطه ناپدید شدن مبتنی بر نظریه هندسه پرسپکتیو است، و همچنین توسط فرض قوی منهتن محدود شده است. از آنجایی که روشهای تولید فرضیههای چیدمان مبتنی بر نقطه ناپدید شدن در محیطهای داخلی بسیار درهم شکسته میشوند، چائو و همکاران. [ 97] از رابطه بین افراد و جعبه اتاق و همچنین معرفی نشانه های هندسی و معنایی برای بهبود عملکرد تخمین نقطه ناپدید شدن بهره برد. پارک و همکاران [ 98 ] یک چارچوب میدانی تصادفی شرطی را ایجاد کرد، که در آن ویژگیهای معنایی حاصل از معماری تقسیمبندی معنایی و نقشههای جهت ادغام میشوند تا طرحبندی داخلی را از تصاویر منفرد تخمین بزنند. با توجه به عملکرد برتر، تکنیکهای یادگیری عمیق نیز برای ارائه ویژگیهای سطح بالا برای تخمین چیدمان یا دستیابی به یک چارچوب تخمین چیدمان انتها به انتها استفاده میشوند. داسگوپتا و همکاران [ 2] یک تصویر RGB منفرد را به پنج دسته (یعنی دیوار چپ، دیوار جلو، دیوار راست، سقف و زمین) با استفاده از یک شبکه کاملاً کانولوشن طبقهبندی کرد و سپس یک چارچوب اصلاحی برای بازیابی طرح فضایی انجام شد. لین و همکاران [ 92 ] یک معماری شبکه کاملاً کانولوشنال سرتاسر را با تعریف جریمه لبه تطبیقی و شرایط همواری برای دستیابی به تخمین چیدمان معنایی مسطح از یک تصویر واحد طراحی کرد.
روشهای مبتنی بر لبه، تخمین چیدمان را به عنوان مشکل یافتن تمام مرزهای دیوار-کف، دیوار-دیوار و دیوار-سقف در نظر میگیرند. مالیا و همکاران [ 99 ] نقشههای احتمال لبههای اطلاعاتی را با استفاده از تصاویر منفرد از طریق یک شبکه کاملاً کانولوشن تعریف و پیدا کرد، و سپس از یک طبقهبندی ساختار یافته حداکثر حاشیه برای تولید تخمین طرحبندی استفاده کرد. جهرمی و همکاران [ 100 ] یک روش تأیید فرضیه ارائه کرد، که در آن مجموعهای از فرضیهها از طریق تقاطع قطعه خط تصادفی و پرتوهای مجازی نقاط ناپدید تولید شدند و سپس از روش تأیید مبتنی بر استدلال هندسی برای جستجوی فرضیه بهینه برای بازسازی استفاده کردند. طرح فضایی صحنه راهرو ژانگ و همکاران [ 93] یک شبکه deconvolutional را با یک استراتژی نمونه گیری تطبیقی ترکیب کرد تا یک نقشه لبه با کیفیت بالا برای تخمین چیدمان اتاق ایجاد کند.
روشهای مبتنی بر نقطه کلید (یا گوشه) بر پیشبینی موقعیت نقاط کلیدی دوبعدی که چیدمان اتاق را تعریف میکنند، تمرکز دارند. به عنوان مثال، هیرزر و همکاران. [ 101 ] یک استراتژی فرضیه و آزمون گوشهای را انجام داد، که در آن فرضیههای تقسیمبندی مختلف بر اساس تعداد متفاوت دیوارهای قابل مشاهده برای بومیسازی گوشهها و پیشبینی چیدمان فضایی بر اساس یک تصویر تکچشمی ایجاد شد. به جای اکثر فرضیهها، تخمینهای چیدمان اتاق را تأیید میکنند، لی و همکاران. [ 94 ] یک چارچوب تخمین چیدمان اتاق انتها به انتها برای استفاده در یک تصویر تک چشمی ایجاد کرد، جایی که نقاط کلیدی که چیدمان اتاق را مشخص میکنند، محلی و مرتب میشوند. فرناندز و همکاران [ 91] همچنین یک چارچوب تخمین چیدمان مبتنی بر گوشه را از 360 تصویر به صورت انتها به انتها توسعه داد.
روش های ترکیبی سعی می کنند عناصر چیدمان مختلف را ترکیب کرده و محدودیت های یکدیگر را تکمیل کنند. بر اساس فرض منهتن، چانگ و همکاران. [ 102 ] مسئله تخمین چیدمان فضایی داخلی را در یک فرآیند بهینه سازی انرژی از یک تصویر تک چشمی، که در آن تابع هزینه با استفاده از مرز و ثبات سطح تعریف می شود، فرموله کرد. زو و همکاران [ 95 ] روشی را پیشنهاد کرد که مستقیماً بر اساس یک تصویر پانوراما است تا طرحبندی مکعبی و کلیتر را از طریق ترکیبی از عناصر چیدمان متعدد (مثلاً گوشهها و مرزها) پیشبینی کند. کروژیلوف و همکاران [ 103 ] نقشههای نقطه کلید و نقشههای لبه را برای پیشبینی چیدمان اتاق با استفاده از یک شبکه اصلاح دوگانه ترکیب کرد.
ادغام تخمین چیدمان اتاق با سایر وظایف (به عنوان مثال، تقسیم بندی معنایی یا تشخیص شی) به طور همزمان انجام می شود، جایی که تخمین چیدمان اتاق می تواند دانش چیدمان فضایی را برای استدلال در تقسیم بندی معنایی یا وظیفه تشخیص شی فراهم کند، در حالی که تقسیم بندی معنایی یا تشخیص شی نیز می تواند ارائه دهد. اطلاعات معنایی برای تخمین چیدمان اتاق شکل 11مثالی از ادغام چند وظیفه ای را ارائه می دهد که در آن نقشه لبه و نقشه تقسیم بندی به طور مشترک تخمین زده می شوند. این یک چارچوب کلی در مورد ادغام چند وظیفه ای بر اساس یک ساختار سلسله مراتبی را نشان می دهد که از یک رمزگذار واحد و سرهای متعدد برای پیش بینی امتیازات از پیش تعریف شده بر اساس الزامات مختلف تشکیل شده است. در این مورد، پیشبینیهای متعدد را میتوان برای برنامههای مختلف برای اهداف مختلف اعمال کرد، در حالی که پارامترهای قابل یادگیری برای بازده محاسباتی بالا به اشتراک گذاشته میشوند، بهویژه در تنظیماتی که جمعآوری دادههای حقیقت زمینی برای همه وظایف پرهزینه است. هداو و همکاران [ 96] یک روش تخمین چیدمان فضایی داخلی را بر اساس تصاویر منفرد ایجاد کرد که در آن چیدمان فضایی و برچسبگذاری سطح به طور مشترک انجام و تکمیل میشوند. آنها یک الگوریتم یادگیری ساختار را برای پیشبینی مدل جعبه سه بعدی پارامتری فضای اتاق جهانی در حین انجام برچسبگذاری سطح پیکسلها پیشنهاد کردند. گوپتا و همکاران با در نظر گرفتن تعامل سه بعدی بین اشیا و چیدمان فضایی. [ 104 ] استدلال حجمی را بین اشیاء داخلی و چیدمان آنها برای بهبود چارچوب پیشبینی ساختار یافته موجود برای بازسازی طرحبندی ارائه کرد. پرو و همکاران [ 105 ] پیشبینی چیدمان را با تشخیص و محلیسازی شی در تصاویر منفرد با استفاده از استدلال سه بعدی و استنتاج بیزی برای درک بهتر صحنههای داخلی ترکیب کرد. شوینگ و همکاران [ 106] یک روش شاخه و کران برای انجام همزمان تخمین چیدمان اتاق و تشخیص اشیا در صحنه های بهم ریخته داخلی پیشنهاد کرد. ژانگ و همکاران [ 107 ] هر دو ویژگی عمق و ظاهر را از تصاویر RGB-D برای پیشبینی مشترک چیدمان اتاق و به هم ریختگی در محیطهای داخلی یکپارچه کرد. برای پیش بینی مشترک ساختار اتاق سه بعدی و اشیاء داخلی، بائو و همکاران. [ 108 ] هر دو اطلاعات هندسی استخراج شده از ساختار از نقاط حرکت را با اطلاعات معنایی با استفاده از تصاویر چند نمای یکپارچه کرد. ژانگ و همکاران [ 109 ] یک معماری شبکه رمزگذار-رمزگشا طراحی کرد که در آن نقشه لبه و اطلاعات معنایی یکپارچه شده بود تا طرح اتاق را از روی یک تصویر تک چشمی بازسازی کند.
به طور خلاصه، تخمین چیدمان با شناسایی سازه های معماری (به عنوان مثال، سقف، کف، دیوار) به دست می آید. با این حال، این فرآیند به دلیل مقادیر قابل توجهی از درهم ریختگی، نورهای متفاوت، واریانس زیاد درون کلاسی و انسداد مبلمان بسیار چالش برانگیز است. این نوع روشها تلاش میکنند تا نقطه کلیدی، نواحی یا لبهها را برای مکانیابی ساختارهای معماری برای دستیابی به تخمین چیدمان شناسایی کنند. اخیراً، تکنیکهای یادگیری عمیق به طور مؤثر اطلاعات معنایی را برای کمک به تصمیمگیری فراهم میکنند، و ساختار سلسله مراتبی آن نقش مهمی در بهینهسازی مشارکتی چند وظیفهای برای تولید تخمین چیدمان قابلاطمینانتر ایفا میکند.
4.1.3. مدلسازی بدون درز داخل و خارج از منزل
با افزایش تقاضا برای برنامه های کاربردی خدمات مبتنی بر مکان داخلی، ادغام مدل های داخلی و خارجی در یک صحنه نیز موضوع جدیدی است. تا جایی که ما می دانیم، در ادبیات روی همسویی مدل های داخلی و خارجی تمرکز کافی وجود ندارد. کوهن و همکاران [ 110 ] اطلاعات پنجره را برای مطابقت با صحنه های داخلی و خارجی در نظر گرفت. به طور مشابه، کوچ و همکاران. [ 111 ] همچنین بخشهای خطی پنجرهها را شناسایی کرد تا بهطور خودکار مدلهای داخلی و خارجی را تراز کند. پیشنماهای شکل هندسی پنجرهها اطلاعات مهمی را برای اتصال مدلهای داخلی و خارجی فراهم میکند، که بینش کلیدی را برای مدلسازی بدون درز داخلی و خارجی ارائه میدهد. با این وجود، روش های موجود توسط این پیشین های شکل هندسی محدود شده اند.
4.2. مدلسازی معنایی
بر خلاف مدلسازی هندسی، که به محتوای آن اهمیتی نمیدهد، مدلسازی معنایی عمدتاً بر برچسبگذاری معنایی (مثلاً انواع شی) تمرکز میکند، که نقش مهمی در مدلهای داخلی غنی از لحاظ معنایی و دقیق هندسی دارد. علاوه بر این، مجموعه دادههای عمومی، مانند SUN RGB-D، ScanNet، NYU، مجموعه داده معنایی 2D-3D-Stanford، Matterport3D، و غیره، حاشیهنویسی معنایی متراکم پیکسلی یا نقطهای را برای ارزیابی عملکرد نتایج تقسیمبندی معنایی به دست آمده ارائه میکنند. از روش های مختلف بیشتر تحقیقات قبلی عمدتاً بر ویژگیهای دست ساز به عنوان ورودی طبقهبندیکننده پرکاربرد برای طبقهبندی خودکار و مدلهای گرافیکی احتمالی، مانند میدانهای تصادفی شرطی (CRF) تکیه داشتند [ 33 ، 112]. همچنین، فیلدهای تصادفی مارکوف (MRFs) به طور سنتی برای رمزگذاری اطلاعات متنی در بخشبندی معنایی استفاده میشوند. شکل 12 چارچوب طبقه بندی کلی را بر اساس ویژگی های دست ساز خلاصه می کند. سیلبرمن و فرگوس [ 33 ] یک مدل مبتنی بر CRF را ایجاد کردند، ترکیبی از موقعیت 3 بعدی، که از قبل از کانالهای عمق گرفته شده بود، با ویژگیهایی که از کانالهای عمق و رنگ برای تقسیمبندی صحنههای داخلی گرفته شدهاند. رن و همکاران [ 113 ] چارچوب مبتنی بر هسته را برای تبدیل شباهت سطح پیکسل در هر سوپرپیکسل به یک توصیفگر وصله اتخاذ کرد، که سپس با اطلاعات متنی تحت چارچوب MRF ها برای برچسب زدن تصاویر RGB-D ادغام شد. سیلبرمن و همکاران [ 34] از نشانههای عمق برای قادر ساختن ساختار هندسی دقیقتر و دقیقتر برای تفسیر سطوح اصلی صحنههای داخلی، به عنوان مثال، کف، دیوار، سطوح حمایتکننده و نواحی شی، از تصاویر RGB-D و بازیابی روابط پشتیبانی فیزیکی استفاده کرد. گوپتا و همکاران [ 114 ] به طور موثری از اطلاعات عمق برای بهینهسازی تقسیمبندی تصویر استفاده کرد و ویژگیهای سوپرپیکسلها را برای طبقهبندی خودکار با استفاده از طبقهبندیکننده جنگل تصادفی و طبقهبندیکننده ماشین بردار پشتیبانی (SVM) تعریف کرد. خان و همکاران [ 112 ] ظاهر، مکان، مرزها، و چیدمان پیکسلها را در چارچوب CRFها برای استدلال درباره مجموعهای از کلاسهای معنادار معنایی از تصاویر RGB-D ترکیب کرد. مولر و بهنکه [ 115] یک چارچوب مبتنی بر CRF را بدون اطلاعات قبلی در مورد چیدمان صحنه، که در آن رنگ، عمق و ویژگیهای صحنه سهبعدی گنجانده شده بود، برای حاشیهنویسی معنایی تصاویر RGB-D ایجاد کرد. دنگ و همکاران [ 116 ] از ساختار هندسی سه بعدی مشتق شده از Kinect استفاده کامل کرد و محدودیت هموقوع شی جهانی، محدودیت رابطه ارتفاع نسبی و محدودیت رابطه پشتیبانی محلی را با استفاده از یک چارچوب مبتنی بر CRF برای تقسیمبندی و حاشیهنویسی RGB-D یکپارچه کرد. تصاویر صحنه های داخلی متأسفانه، این روشهای مرسوم معمولاً شامل تقسیمبندی از پایین به بالا، استخراج ویژگی و طبقهبندی میشوند و نتایج نهایی آنها به نتایج هر مرحله بستگی دارد [ 3 ].
با در دسترس بودن یک شبکه عصبی کانولوشنال (CNN) در بسیاری از کاربردها، معماریهای مختلف مبتنی بر CNN برای استخراج ویژگیهای معنایی سطح بالا برای تقسیمبندی معنایی در سالهای اخیر توسعه یافتهاند. بدون نیاز به ویژگی های مهندسی شده، فارابت و همکاران. [ 117 ] بافت، شکل و اطلاعات زمینهای را از مناطق با اندازههای چندگانه در مرکز هر پیکسل برای استخراج بردارهای ویژگی متراکم با استفاده از معماری CNN برای برچسبگذاری صحنه، ضبط کرد. به دنبال ایده روش CNN منطقه ای (R-CNN) [ 118 ]، گوپتا و همکاران. [ 119] ارتفاع از سطح زمین، زاویه با گرانش برای هر پیکسل و نابرابری افقی را کدگذاری کرد. سپس، آنها مجموعه ای از مناطق مورد علاقه را از یک تصویر ورودی استخراج کردند، ویژگی های هر منطقه استخراج شده را با استفاده از معماری CNN محاسبه کردند، و هر منطقه استخراج شده را با استفاده از طبقه بندی کننده SVM برای تشخیص شی طبقه بندی کردند. در نهایت، آنها یک چارچوب طبقهبندی مبتنی بر پیکسلهای فوقالعاده [ 114 ] بر روی خروجی آشکارسازهای شی برای تقسیمبندی صحنه معنایی ایجاد کردند. اگرچه آنها می توانند یک نمایش ویژگی قدرتمند بر اساس معماری های CNN ایجاد کنند، این روش های مبتنی بر پیشنهاد منطقه ای مبتنی بر CNN مقدار زیادی از محاسبات مکرر را نشان می دهند و خود سیستم را وادار می کنند که خطاهای بالقوه در الگوریتم تقسیم بندی جلویی را مرتکب شود [ 120 ].
برای مقابله با محدودیتهایی که این روشهای پیشنهادی منطقه مبتنی بر CNN از آن رنج میبرند، روشهای مبتنی بر شبکه کاملاً کانولوشن (FCN) [ 121 ] استخراج ویژگی کارآمد و آموزش انتها به انتها را نشان میدهند، و بنابراین برای تقسیمبندی معنایی محبوبیت فزایندهای پیدا کردهاند. شکل 13 چارچوب طبقه بندی سرتاسری را بر اساس یادگیری عمیق ترسیم می کند، جایی که برخی از ماژول های معمولی [ 122 ، 123 ، 124 ] خلاصه می شوند. علاوه بر این، این نوع شبکه می تواند ورودی هایی با اندازه دلخواه بگیرد و خروجی هایی با اندازه متناظر تولید کند. حاضرباس و همکاران [ 125] یک معماری مبتنی بر رمزگذار-رمزگشا ایجاد کرد، که در آن نشانههای عمق تکمیلی در نقشههای ویژگی RGB استخراجشده در طول روشهای رمزگذار برای تقسیمبندی معنایی داخلی ترکیب شدند. حسین و همکاران [ 3 ] ویژگی های معنایی تصاویر رنگی، ویژگی های هندسی و ویژگی پیشنهادی فاصله از دیوار را برای تقسیم بندی کلاس شی صحنه های داخلی ترکیب کرد. جیانگ و همکاران [ 126 ] یک شبکه عصبی کاملاً کانولوشنال مبتنی بر RGB-D را با یک میدان تصادفی شرطی کاملاً متصل حساس به عمق ترکیب کرد تا نتایج تقسیمبندی معنایی را اصلاح کند. چنگ و همکاران [ 127] اطلاعات بصری و هندسی محلی را برای بازیابی مرزهای اشیاء تیز گنجاند و از یک لایه همجوشی دروازهای برای تنظیم ترکیب نشانههای RGB و عمق برای بهبود عملکرد تشخیص اشیا استفاده کرد. لین و همکاران [ 128 ] از نشانههای عمق برای تقسیم صحنه به لایههای متعدد با ویژگیهای بصری مشابه استفاده کرد و سپس یک میدان دریافتی آگاه از زمینه را برای استفاده کامل از ویژگیهای بصری مشترک صحنههای مشاهدهشده پیشنهاد کرد. در نهایت، آنها یک مدل شبکه مبتنی بر چند شاخه را برای تقسیمبندی تصاویر RGB-D پیادهسازی کردند. لی و همکاران برای بهره برداری کافی از اطلاعات زمینه ای. [ 129] یک FCN دو جریانی را برای تعیین ویژگیهای RGB و عمق انجام داد و به تدریج این ویژگیها را از سطح بالا به سطح پایین برای تقسیمبندی معنایی صحنههای داخلی ترکیب کرد. جیانگ و همکاران [ 130 ] یک معماری رمزگذار-رمزگشا برای استخراج اطلاعات RGB و اطلاعات عمقی به طور جداگانه و ترکیب اطلاعات در چندین لایه برای تقسیم بندی معنایی داخلی ایجاد کرد. با ترکیب اطلاعات عمق، می توان اطلاعات هندسی مکانی را که نسبت به تغییرات و ظواهر روشنایی تغییر ناپذیرتر است، برای بهبود تقسیم بندی معنایی به دست آورد. گوو و چن [ 131] یک CNN عمیق برای تخمین نقشه عمق از یک تصویر RGB منفرد اتخاذ کرد و تصویر عمق تخمینی را با تصویر RGB اصلی برای بهبود عملکرد تقسیمبندی معنایی داخلی ادغام کرد.
به طور خلاصه، در مقایسه با روشهای مبتنی بر ویژگی دست ساز، یک چارچوب پایان به پایان مبتنی بر معماری یادگیری عمیق، عملکرد برتری را نشان میدهد که در آن مقیاسهای مختلف اطلاعات استخراج و تحت یک ساختار سلسله مراتبی ترکیب میشوند. در همین حال، توانایی محاسباتی قوی، به ویژه هنگام استفاده از واحد پردازش گرافیکی (GPU)، امکان استفاده از داده های در مقیاس بزرگ را برای یادگیری فراهم می کند. علاوه بر این، به دلیل توانایی برتر در تجمیع اطلاعات، عملیات کانولوشن نه تنها از داده های منظم/ساختار یافته (مثلاً تصویر یا تصویر RGB-D)، بلکه از داده های غیرساختار یافته (مثلاً ابرهای نقطه ای) استفاده می کند که راه حل های بیشتری را ارائه می دهد. برای تفسیر بهتر داده های صحنه داخلی و امکان اطلاعات بیشتر از دیدگاه های مختلف برای تصمیم گیری.
4.3. مدل سازی توپولوژیکی
بر خلاف فضاهای بیرونی، که در آن یک مکان خاص توسط سیستم های مرجع مختصات تعریف و نشان داده می شود، موقعیت در یک فضای داخلی معمولاً با استفاده از یک شناسه سلول یا یک کد نمادین مشخص می شود. علاوه بر این، فاصله بین هر دو موقعیت در یک فضای بیرونی را می توان با طول خطی بین آن تعیین و محاسبه کرد. با این حال، وضعیت در یک فضای داخلی متفاوت است و تحت تأثیر ساختارهای معماری (مانند دیوارها و درها) قرار می گیرد. در نتیجه، هر مدل اطلاعات مکانی مناسب برای فضای بیرونی به دلیل تفاوتهایشان (مانند تأثیرات ساختارهای معماری و فقدان سیگنالهای سیستم ناوبری ماهوارهای جهانی (GNSS)) نمیتواند به سادگی در فضای داخلی اعمال شود. بنابراین، برای مدیریت و نگهداری اطلاعات پیچیده فضای داخلی به طور موثر،132 ]. یعنی، نمایش غنی از لحاظ معنایی یک محیط داخلی نه تنها به هندسه و معناشناسی نیاز دارد، بلکه به توپولوژی [ 74 ] نیز نیاز دارد که اطلاعات مفیدی در مورد اشیاء هندسی مانند مکان درها یا نقاط خروجی در یک ساختمان ارائه میکند تا قابلیت مسیریابی پویا را فراهم کند. و حرکت درب به در [ 133 ]. همانطور که در شکل 14 نشان داده شده است ، یک نمودار دوگانه برای نشان دادن روابط اتصال (خطوط جامد سیاه) و روابط مجاورت (خطوط چین دار قرمز) ساخته شده است [ 80 ]. بنابراین، بازیابی روابط فضایی نقش مهمی در برنامههای کاربردی داخلی دارد، از برنامهریزی مسیر و ناوبری داخلی تا خدمات مبتنی بر بومیسازی.
توپولوژی روشی را پیشنهاد میکند که در آن اتاقها، راهروها، پلهها و درها به هم مرتبط یا چیده شدهاند، معمولاً اطلاعات زیر را ارائه میدهند: “کدام اتاق مجاور کدام اتاق است؟” و “کدام در کدام اتاق را به هم وصل می کند؟” [ 134 ] روشهای موجود برای مدلسازی روابط توپولوژیکی داخلی به طور کلی میتوانند به سه دسته طبقهبندی شوند: مدلهای روش تقسیمبندی، مدلهای شبکهای و مدلهای ترکیبی. بر اساس این مدلهای توپولوژیکی داخلی، تحلیل فضایی پیچیده (به عنوان مثال، یافتن کوتاهترین و طبیعیترین مسیر برای موقعیتهای خاص) میتواند پیادهسازی شود [ 135 ]]. روش تقسیم فضای داخلی را به مجموعه ای از سلول های غیر همپوشانی تقسیم می کند تا روابط توپولوژیکی آنها را تجزیه و تحلیل و استخراج کند، که معمولاً توسط ساختارهای گراف گره و لبه نشان داده می شود. ترون و همکاران [ 136 ] از شبکه های عصبی مصنوعی و ادغام بیزی برای استخراج اطلاعات سطح بالا از یک نقشه شبکه، که در آن نقاط بحرانی در نمودار Voronoi شناسایی شدند، برای تولید یک نقشه توپولوژیکی استفاده کردند. جو و همکاران [ 137 ] تشخیص درب مجازی مبتنی بر ویژگی گوشه را انجام داد و یک الگوریتم ژنتیک را برای تولید یک نقشه توپولوژیکی از نقشه شبکه اشغال استفاده کرد. پرتغال و روچا [ 138 ] همچنین یک نمودار توپولوژیکی ساده را از نقشه شبکه استخراج کردند تا به وظیفه ناوبری کمک کنند. یانگ و وربویز [ 139] یک نقشه ترکیبی را که هم هندسه و هم اطلاعات معنایی را در بر می گرفت، به ساختارهای داخلی مبتنی بر نمودار تبدیل کرد تا توپولوژی و اتصال را توصیف کند. تران و همکاران [ 134 ] ابرهای نقطه ای را به فضای قابل کشتیرانی و غیرقابل هدایت تقسیم کرد و سپس از قوانین دستور زبان برای بازسازی روابط توپولوژیکی استفاده کرد. به جای تقسیم بندی فضاهای داخلی، Sithole و همکاران. [ 140 ] یک نمودار کلی از فضاهای داخلی با ساده سازی مکرر نقشه های طبقه آنها ساخت. بر اساس ساختارهای نمودار، روش تقسیم بندی از نظر تحلیل مسیر و پرس و جو کارایی بالایی دارد، اما اطلاعات مکان مکانی را نادیده می گیرد. مدلهای شبکهای بر اساس روش مبتنی بر وکسل برای در نظر گرفتن اندازه مسیر برای ارائه چندین مسیر داخلی به کاربران ایجاد شدهاند. دمین و همکاران [ 141] محیط داخلی را بر اساس یک شبکه مثلثی نامنظم نشان داد و تحلیل مسیریابی را پیاده سازی کرد. لی و همکاران [ 142 ] یک مدل مبتنی بر گراف شبکه ای برای نشان دادن یک فضای داخلی با در نظر گرفتن ویژگی های ساختاری و فضایی آن ایجاد کرد و پتانسیل مدل پیشنهادی را از طریق تحلیل فضای داخلی نشان داد. آرجونا و همکاران [ 143 ] نگاشت فضای داخلی شبکه اشغال ساده برای روبات های کم هزینه. خو و همکاران [ 144] اطلاعات هندسی و معنایی مورد نیاز را از مدل BIM استخراج کرد و با در نظر گرفتن موانع یک شبکه ناوبری شبکه دو بعدی ایجاد کرد. در مقایسه با روش تقسیمبندی، مدلهای شبکه اطلاعات موقعیتی را حفظ میکنند اما حجم دادهها و پیچیدگی محاسباتی را افزایش میدهند و همچنین کارایی تحلیل فضایی را کاهش میدهند. برای ترکیب مزایای روش تقسیم بندی و مدل های شبکه ای منظم و کاهش محدودیت های آنها، توسعه یک مدل ترکیبی می تواند تعادل یک مدل واحد را بهبود بخشد. لی و لی [ 145 ] یک مدل نمایش توپولوژی داخلی مبتنی بر شبکه را پیشنهاد کردند، که قادر است یک نمایش صریح نه تنها مهار و همپوشانی، بلکه مجاورت مفهوم شبکه را نیز ارائه دهد. لین و همکاران [ 146] یک نمودار توپولوژی و یک مدل شبکه را برای بهبود عملکرد تحلیل فضایی و ارائه اطلاعات موقعیتی ترکیب کرد.
به منظور در دسترس قرار دادن قابلیت همکاری دادههای فضایی داخلی، چندین استاندارد داده مکانی (به عنوان مثال، IFC، CityGML و IndoorGML) [ 147 ] در سالهای اخیر برای تعریف، سازماندهی و ذخیره محیطهای فیزیکی داخلی با جزئیات توسعه یافتهاند. در میان این استانداردهای داده، هر کدام نیازهای منحصر به فرد یک برنامه خاص را برآورده می کنند و مطالعات متعددی در مورد تولید توپولوژی ارائه شده است. خان و همکاران [ 148 ] یک تبدیل خودکار هندسی، معنایی و توپولوژیکی از یک مدل ساختمان سه بعدی معنایی موجود (به عنوان مثال، IFC یا CityGML LoD4) به IndoorGML انجام داد. میروهابی و عباسپور [ 149 ] فایل داده IndoorGML را از فایل OpenStreetMap استخراج کردند. با اشاره به IndoorGML، ژو و همکاران. [ 150] GML موقعیت مکانی چند بعدی داخلی را عمدتاً برای مکان یابی داخلی و ناوبری تعریف کرده است. تئو و یو [ 151 ] روابط توپولوژیکی را از BIM به یک مدل شبکه داخلی ذخیره شده در ساختارهای IndoorGML تبدیل کردند. سریواستاوا و همکاران [ 152 ] موجودیت های هندسی مرتبط و روابط توپولوژیکی آنها را از نقشه های CAD استخراج کرد و اطلاعات معنایی را برای گسترش IndoorGML موجود اضافه کرد. تسما و همکاران [ 153 ] هم اطلاعات معنایی و هم اطلاعات توپولوژیکی را از یک نقشه شبکه اشغال استخراج کرد و این اطلاعات استخراج شده را به یک نمودار رابطه گره معنایی ذخیره شده در قالب IndoorGML ترجمه کرد. با انگیزه یک مطالعه موردی موزه، Kontarinis و همکاران. [ 154] با ترکیب مدلهای مسیر معنایی موجود در فضای باز و مدل نمادین فضای داخلی سلسله مراتبی غنی از لحاظ معنایی، یک مدل مسیر داخلی معنایی ایجاد کرد. Flikweert و همکاران [ 155 ] به طور خودکار یک نمودار ناوبری را از ابرهای نقطه متحرک مبتنی بر مسیر استخراج کرد، که در آن فضاهای متصل، فضاهای قابل پیاده روی، اتاق ها و راهروها شناسایی و سازماندهی شدند و آنها را در قالب IndoorGML ذخیره کرد. مورتاری و همکاران [ 156 ] یک مدل ناوبری با استفاده از اطلاعات هندسی از CityGML پیشنهاد کرد و عناصر معنایی (به عنوان مثال، دهانه ها) را در ایجاد مدل ناوبری داخلی برای برآوردن نیازهای انسان معرفی کرد. با شروع از ابرهای نقطه خام، نیکوهمت و همکاران. [ 157] برای انجام ناوبری و برنامه ریزی مسیر، یک روش بازسازی سه بعدی داخلی، که شامل موانع نیز بود، توسعه داد.
اگرچه استانداردهای داده موجود، اطلاعات فضایی دقیق را برای پشتیبانی از کاربردهای داخلی داخلی تعریف، سازماندهی، مدیریت و ذخیره میکنند، تلاشهای بیشتری برای کشف و پیادهسازی جنبههای بالقوه آنها و تکمیل نسخههای فعلی آنها مورد نیاز است، که ممکن است به صراحت در این مقاله توضیح داده نشود. سند استاندارد [ 158 ]. به عنوان مثال، IndoorGML نسخه 1 برای برآوردن الزامات برنامه های ناوبری داخلی (به عنوان مثال، سرویس های مبتنی بر مکان داخلی و خدمات مسیریابی) توسعه یافته است، اما انتظار می رود سایر الزامات (مانند مدیریت تسهیلات) در نسخه های آینده آن انجام شود [ 145 ]]. علاوه بر این، ترکیباتی برای تکمیل یکدیگر برای برآوردن نیازهای خاص کاربردهای مختلف داخلی وجود دارد. کیم و همکاران به عنوان مکمل یکدیگر. [ 159 ] داده های IndoorGML را از CityGML LoD4 تولید کرد و ارجاعات خارجی را از IndoorGML به یک شی در CityGML LoD4 ارائه کرد. لیو و همکاران [ 160 ] IndoorGML را با IndoorLocationGML یکپارچه کرد، جایی که IndoorGML تقسیم بندی فضاهای داخلی را ارائه می دهد، در حالی که معناشناسی مکان در IndoorLocationGML می تواند معرفی شود. برای پرداختن به محدودیتهای سطح استاندارد شده جزئیات (LoD)، تانگ و همکاران. [ 161 ] یک مشخصات LoD داخلی را با استفاده از IFC و IndoorGML گسترش داد تا به یک مشخصات LoD کامل برای مدلهای ساختمان سه بعدی دست یابد. زنگ و کانگ [ 162] عناصر ناوبری را از داده های RGB-D استخراج کرد و آنها را تحت چارچوب IndoorGML کدگذاری کرد. آلاتاس و همکاران [ 163 ] حقوق دسترسی فضاهای داخلی را در نظر گرفت و یک مدل مفهومی ایجاد کرد که مدل دامنه مدیریت زمین (LADM) و IndoorGML را برای تعریف حقوق، محدودیتها و مسئولیتهای کاربران ترکیب میکند. علاوه بر این، برخی توصیه ها با هدف بهبود استاندارد آینده مورد بحث قرار گرفته است. دیاکیته و همکاران [ 164 ] اشاره کرد که چندین مفهوم (به عنوان مثال، فاصله سلولی فرعی) در نسخه فعلی IndoorGML باید بهبود یابد، و چندین معیار را برای انجام خودکار فرآیندهای تقسیم بندی داخلی پیشنهاد کرد.
5. روندها و چالش ها
در سال های اخیر، بازسازی سه بعدی محیط های داخلی به طور فزاینده ای برای توسعه بسیاری از برنامه های کاربردی داخلی، مانند هدایت ناوبری، مدیریت اضطراری، تعمیر و نگهداری ساختمان، و برنامه ریزی نوسازی، و همچنین طیف وسیعی از خدمات مبتنی بر مکان داخلی (مثلا ، راهیابی و تحویل محتوای متنی). بنابراین، این بررسی ادبیات خلاصهای در رابطه با تکنیکهای پیشرفته برای بازسازی سه بعدی محیطهای داخلی ارائه میکند. با توسعه مداوم تحقیقات، چالش ها و روند تکنیک های فعلی در این بخش مورد بحث قرار می گیرد.
5.1. فرض غیر منهتن
محدودیت عمده در روشهای موجود عموماً به فرض قوی منهتن مربوط میشود [ 92 ، 94 ، 96 ، 97 ، 102 ، 103 ، 104 ، 109 ]، که در آن ساختارهای اصلی ساختمانها مستطیل شکل و متعامد فرض میشوند. با این حال، فضاهای داخلی با ساختارهای هندسی پیچیده (به عنوان مثال، دیوارهای استوانهای، سقفهای کروی، چیدمان L شکل، یا سایر سازههای غیرمسطح [ 20 ، 95 ، 165 ، 166 ، 167 )]) در محیط های داخلی فعلی رخ می دهد. بنابراین، بازیابی یک مدل کامل سه بعدی داخلی با اشکال هندسی دلخواه یک موضوع جالب برای مطالعه آینده است [ 95 ، 168 ].
5.2. بهینه سازی مشارکتی چند کاره
هدف یک کار واحد معمولاً نمی تواند اطلاعات کافی برای دستیابی قوی به نیازهای ایده آل تولید کند. بهینه سازی مشارکتی چند وظیفه ای اطلاعات اضافی و مکمل را از دیدگاه های مختلف برای کمک به تکمیل کار ارائه می دهد. به عنوان مثال، برای تخمین مشترک چیدمان اتاق و برای تشخیص اشیاء سه بعدی [ 106 ، 169 ]، تخمین چیدمان اتاق اطلاعاتی از محدودیت های فضایی برای تشخیص اشیا ارائه می دهد، در حالی که تشخیص شی نیز اطلاعات انسداد را برای تخمین چیدمان اتاق ارائه می دهد، بنابراین یکدیگر را تکمیل می کنند. مثال دیگر بهینه سازی مشترک چیدمان اتاق و وظیفه تقسیم بندی معنایی است [ 109]. علاوه بر این، بهینهسازی مشارکتی چند وظیفهای همچنین میتواند به وزنهای مشترک در معماریهای شبکه طراحیشده برای کاهش هزینههای آموزشی و محاسباتی دست یابد [ 170 ، 171 ]. بنابراین، ادغام تکنیکهای بهینهسازی مشارکتی چند وظیفهای و یادگیری عمیق نیز تمرکز آینده برای مدلسازی و کاربردهای محیط داخلی خواهد بود.
5.3. درک صحنه داخلی با ترکیب هر دو سازگاری مکانی و زمانی
کارهای قبلی عمدتاً بر مدلسازی اطلاعات فضایی یا زمینه فضایی بر اساس یک تصویر RGB(-D) واحد متمرکز شدهاند، که در آن سازگاری فضایی به طور گسترده به عنوان یک محدودیت ذاتی در مدلسازی و برنامههای کاربردی محیط داخلی مورد استفاده قرار گرفته است. با این حال، توجه کمی به سازگاری توالی تصاویر [ 172 ] شده است. بنابراین، سازگاری زمانی توالیها در بسیاری از مدلسازیهای داخلی و کاربردهای دنیای واقعی، مسئلهای است که باید حل شود [ 127 ، 173 ، 174 ، 175 ، 176 ، 177 ، 178 ، 179 .] از آنجایی که، برای صحنههای پویا پیچیده، اشیاء متحرک شکلها و ظواهر مشابهی از نظر مکانی و زمانی از خود نشان میدهند [ 180 ]. از این رو، ترکیب هر دو سازگاری مکانی و زمانی نیز به منظور بهبود استحکام درک صحنه های داخلی (به عنوان مثال، تقسیم بندی معنایی و تشخیص شی) مهم خواهد بود.
5.4. بازسازی خودکار مدل های داخلی با سطوح مختلف جزئیات
تا به حال، مدل سازی سازه ای ساختمان ها تنها بر عناصر اصلی سازه ای (به عنوان مثال، دیوارها، کف، سقف و دهانه ها) متمرکز بوده است [ 14 ، 76 ، 79 ، 83 ، 181 ، 182 ]. برای تسهیل طیف وسیعی از خدمات مبتنی بر مکان، یک مدل داخلی سه بعدی دقیق تر با مبلمان داخلی (مخصوصاً موانع) باید برای کاربردهای ریزدانه تعریف و ایجاد شود [ 183 ]، که در آن ساختارهای فضایی آن توضیح داده شده و مبلمان داخلی نیز مدل سازی شده است. [ 10 ، 184]. اگرچه اشیاء داخلی در LoD4 دخیل هستند، بدیهی است که تعریف LoD فعلی ممکن است برای پاسخگویی به نیازهای تنوع رو به افزایش کاربردها، که ممکن است به ساختارهای داخلی با سطوح دقت متفاوت نیاز داشته باشد، کافی نباشد. در کار آینده، ویژگیهای هندسی بیشتری باید به منظور تولید مدلهای اطلاعات فضایی قویتر با هندسه دقیق و معناشناسی غنی مورد بررسی قرار گیرد.
5.5. ادغام بدون درز فضای داخلی-خارجی
برای اینکه مردم بتوانند به طور یکپارچه بین ساختمان ها و مناطق اطراف حرکت کنند، یک نمایش کامل از ساختمان های داخلی و خارجی برای ارائه پشتیبانی در زمینه داخلی-خارج ضروری است [ 161 ، 185 ]. با این حال، این به دلیل تفاوت در ساختارهای فیزیکی، روابط فضایی بین موجودات، و غیره چالش برانگیز است [ 186 ]. به عنوان مثال، تناظرهای بصری کمی وجود دارد که بخشی از هر دو مدل داخلی و خارجی برای هم ترازی آنها باشد [ 111 ]. علاوه بر این، انجام یک بازسازی کامل برای گرفتن کل صحنه از بیرون به داخل به دلیل دریفت یا فقدان ویژگی های منطبق در بیشتر موارد، نادرست است [ 111 ]]. بنابراین، دوخت قوی مدلهای داخلی و خارجی با هم بدون/چند همپوشانی بصری به یک موضوع فعال تبدیل شده است.
6. نتیجه گیری
این مقاله یک بررسی جامع را به منظور تحلیل و خلاصه سازی بازسازی سه بعدی محیط های داخلی انجام داد. به دلیل اهمیت توسعه تکنیکهای بازسازی سهبعدی برای محیطهای داخلی، ابتدا شرح مختصری از مجموعه دادههای معیار موجود ارائه کردیم که میتواند برای ارزیابی عملکرد الگوریتمهای مختلف و همچنین روشهای جمعآوری دادهها در مورد فضاهای داخلی سه بعدی استفاده شود. . از آنجایی که بازسازی صحنه های داخلی از نظر دقت و دقت بسیار رضایت بخش نیست، تعداد فزاینده ای از مجموعه داده ها به عنوان معیار برای امکان مقایسه بین روش های مختلف بازسازی (از جمله هندسی، معنایی و توپولوژیکی) و ارتقای وضعیت بین المللی منتشر می شود. تحقیق هنر در همین حال، با توسعه فناوری حسگر،
بنابراین، این بررسی، تجزیه و تحلیل دقیق و خلاصهای از مطالعات موجود در رابطه با بازسازی سهبعدی محیطهای داخلی را ارائه میدهد که میتوان آنها را با توجه به اصول ذاتی و الزامات کاربردی به دستههای مختلفی تقسیم کرد. بهجای ارائه یک تحلیل کمی در میان روشهای مختلف، ما عمدتاً بر معرفی نظریههای مربوطه (به عنوان مثال، بازسازی هندسی، معنایی و توپولوژیکی محیطهای داخلی) و مزایا و معایب آنها تمرکز کردیم. با توجه به بازسازی هندسی، اکثر روش های موجود بر اساس فرضیه قوی منهتن است و عمدتاً بر بازسازی سازه های اصلی معماری متمرکز است. بازسازی مبلمان داخلی و مدل سازی بدون درز فضاهای داخلی و خارجی هنوز در مراحل اولیه است. علاوه بر این، اگرچه ویژگیهای به هم ریخته و مسدود محیطهای داخلی هنوز چالشهای بزرگی را برای مدلسازی معنایی ایجاد میکند، تکنیکهای یادگیری عمیق و قابلیت عملیاتی داده قوی، بهویژه بر اساس استفاده از یک GPU، میتواند تعمیم مدلهای قابل یادگیری را برای به دست آوردن نتایج تفسیر بهتر بهبود بخشد. علاوه بر این، ساختارهای هرمی سلسله مراتبی معماریهای یادگیری عمیق، طرحهای مشترک چند وظیفهای را قادر میسازد تا به طور مشترک یکدیگر را با استفاده از اطلاعات اضافی و مکمل از دیدگاههای مختلف بهینهسازی کنند، که پتانسیل آنها را برای استفاده در بازسازی سه بعدی محیطهای داخلی نشان میدهد. علاوه بر این، وقوع استانداردهای دادههای مکانی (مانند IFC، CityGML و IndoorGML) برای تعریف، سازماندهی و ذخیرهسازی دقیق محیطهای فیزیکی داخلی مفید است. و نیازهای منحصر به فرد یک برنامه خاص را برآورده می کند. اگرچه استانداردهای داده موجود، اطلاعات فضایی دقیق را برای پشتیبانی از کاربردهای داخلی داخلی تعریف، سازماندهی، مدیریت و ذخیره میکنند، تلاشهای بیشتری برای کشف و پیادهسازی جنبههای بالقوه آنها و تکمیل نسخههای فعلی آنها مورد نیاز است، که ممکن است به صراحت در این مقاله توضیح داده نشود. سند استاندارد
در نهایت، چالشها و روندهایی که تکنیکهای فعلی با آن مواجه هستند، مانند بازسازی صحنههای داخلی بدون فرض قوی منهتن، بهینهسازی مشارکتی چند کاره برای تکمیل یکدیگر، درک صحنه با ترکیب همسانی مکانی و زمانی، بازسازی خودکار مدلهای داخلی با مدلهای مختلف. سطوح جزئیات، و ادغام یکپارچه فضای داخلی و خارجی، خلاصه و مورد بحث قرار گرفت.
منابع
- آژانس حفاظت از محیط زیست ایالات متحده ساختمان ها و تأثیر آنها بر محیط زیست: خلاصه آماری ; کارگروه ساختمان سبز آژانس حفاظت از محیط زیست ایالات متحده: واشنگتن، دی سی، ایالات متحده آمریکا، 2009.
- داسگوپتا، اس. نیش، ک. چن، ک. Savarese, S. Delay: تخمین چیدمان فضایی قوی برای صحنه های بهم ریخته داخلی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 26 ژوئن تا 1 ژوئیه 2016. صص 616-624. [ Google Scholar ]
- حسین، ف. شولز، اچ. دلن، بی. توراس، سی. Benke, S. ترکیب ویژگی های معنایی و هندسی برای تقسیم بندی کلاس شی صحنه های داخلی. ربات IEEE. خودکار Lett. 2016 ، 2 ، 49-55. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سکویرا، وی. Gonçalves، JG; Ribeiro، MI بازسازی 3 بعدی محیط های داخلی. در مجموعه مقالات سومین کنفرانس بین المللی IEEE در مورد پردازش تصویر، لوزان، سوئیس، 19 سپتامبر 1996; ص 405-408. [ Google Scholar ]
- ایسیکداغ، یو. زلاتانوا، اس. Underwood، J. یک مدل BIM-oriented برای پشتیبانی از الزامات ناوبری داخلی. محاسبه کنید. محیط زیست سیستم شهری 2013 ، 41 ، 112-123. [ Google Scholar ] [ CrossRef ]
- احمد، ع.ا. الشابطی، م. الزبیری، الف. الگوریتم راهنمایی اضطراری داخلی بر اساس شبکههای حسگر بیسیم. در مجموعه مقالات کنفرانس بین المللی 2015 رایانش ابری (ICCC)، ریاض، عربستان سعودی، 26-29 آوریل 2015؛ صص 1-5. [ Google Scholar ]
- چن، سی. Tang, L. طراحی گردش کار مدیریت یکپارچه مبتنی بر BIM برای برنامه ریزی و برنامه ریزی هزینه تعمیر و نگهداری پارچه ساختمان. خودکار ساخت و ساز 2019 ، 107 ، 102944. [ Google Scholar ] [ CrossRef ]
- تیان، ایکس. شن، آر. لیو، دی. ون، ی. وانگ، ایکس. تجزیه و تحلیل عملکرد مکان یابی داخلی بر اساس اثر انگشت RSS. IEEE Trans. اوباش محاسبه کنید. 2016 ، 16 ، 2847-2861. [ Google Scholar ] [ CrossRef ]
- چن، ک. لای، ی.-ک. هو، اس.-م. مدل سازی صحنه داخلی سه بعدی از داده های RGB-D: یک نظرسنجی محاسبه کنید. Vis. رسانه 2015 ، 1 ، 267-278. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ی. لیو، ز. میائو، ز. وو، دبلیو. لیو، ک. Sun, Z. مدلسازی صحنه داخلی مبتنی بر دادههای تک تصویر. محاسبه کنید. نمودار. 2015 ، 53 ، 210-223. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- انگل، جی. استوکلر، جی. Cremers, D. SLAM مستقیم در مقیاس بزرگ با دوربین های استریو. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2015 در مورد ربات ها و سیستم های هوشمند (IROS)، هامبورگ، آلمان، 28 سپتامبر تا 2 اکتبر 2015؛ صفحات 1935-1942. [ Google Scholar ]
- لیوا، جی. مارتینز، پی. پرز، ای. اوردیالز، سی. Sandoval, F. بازسازی 3 بعدی محیط استاتیک داخلی با ادغام داده های سونار و ویدئو. در مجموعه مقالات سمپوزیوم بین المللی در مورد سیستم های رباتیک هوشمند، تولوز، فرانسه، 18 تا 20 ژوئیه 2001. [ Google Scholar ]
- یانگ، اچ. ژانگ، اچ. مدلسازی ساختار اتاق از پانورامای داخلی. در مجموعه مقالات سیزدهمین کنفرانس بین المللی ACM SIGGRAPH درباره پیوستار واقعیت مجازی و کاربردهای آن در صنعت، شنژن، چین، 30 نوامبر تا 2 دسامبر 2014. ص 47-55. [ Google Scholar ]
- وانگ، سی. هو، اس. ون، سی. گونگ، ز. لی، کیو. سان، ایکس. Li, J. مدلسازی ساختمان داخلی مبتنی بر چارچوب خط معنایی با استفاده از ابر نقطه اسکن لیزری کولهای. ISPRS J. Photogramm. Remote Sens. 2018 , 143 , 150–166. [ Google Scholar ] [ CrossRef ]
- بوکاریس، پ. مازلت، دی. Trémeau, A. بازسازی سه بعدی صحنه های داخلی با استفاده از یک تصویر RGB-D. در مجموعه مقالات دوازدهمین کنفرانس بین المللی نظریه و کاربردهای بینایی رایانه (VISAPP 2017)، پورتو، پرتغال، 27 فوریه تا 1 مارس 2017. [ Google Scholar ]
- والنتین، جی پی. سنگوپتا، اس. وارل، جی. شاهرکنی، ع. مدلسازی معنایی Torr، PH Mesh برای صحنههای داخلی و خارجی. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، پورتلند، OR، ایالات متحده آمریکا، 23 تا 28 ژوئن 2013. ص 2067–2074. [ Google Scholar ]
- یونگ، جی. هونگ، اس. یون، اس. کیم، جی. Heo, J. مدلسازی قاب سیمی سه بعدی خودکار سازههای داخلی از ابرهای نقطهای با استفاده از تنظیم حداقل مربعات محدود برای BIM ساخته شده. جی. کامپیوتر. مدنی مهندس 2015 ، 30 ، 04015074. [ Google Scholar ] [ CrossRef ]
- شائو، تی. خو، دبلیو. ژو، ک. وانگ، جی. لی، دی. Guo, B. یک رویکرد تعاملی برای مدلسازی معنایی صحنههای داخلی با دوربین rgbd. ACM Trans. نمودار. TOG 2012 , 31 , 136. [ Google Scholar ] [ CrossRef ]
- اوچمن، اس. ووک، آر. وسل، آر. Klein, R. بازسازی خودکار مدل های ساختمانی پارامتریک از ابرهای نقطه داخلی. محاسبه کنید. نمودار. 2016 ، 54 ، 94-103. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یانگ، اف. ژو، جی. سو، اف. زو، ایکس. تانگ، ال. لیانگ، ی. زو، اچ. Li, L. بازسازی خودکار فضای داخلی از ابرهای نقطه ای در محیط های چند اتاق با دیوارهای منحنی. Sensors 2019 , 19 , 3798. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- فروز، تی. گروبلر، اف. ریتسنتالر، جی. یو، ک. آکینجی، بی. اکباس، ر. کو، بی. بارون، ا. کلاسهای بنیاد صنعتی کونز، JC برای مدیریت پروژه – اجرای آزمایشی. ITcon 1999 ، 4 ، 17-36. [ Google Scholar ]
- گروگر، جی. کلبه، تی. ناگل، سی. هافله، K.-H. استاندارد رمزگذاری زبان جغرافیایی شهر OGC (CityGML) . کنسرسیوم فضایی باز، 2012. در دسترس آنلاین: https://www.opengis.net/spec/citygml/2.0 (در 17 مه 2020 قابل دسترسی است).
- ناصر، م. خان، س. Porikli، F. درک صحنه داخلی در 2.5/3d برای عوامل مستقل: یک بررسی. دسترسی IEEE 2018 ، 7 ، 1859-1887. [ Google Scholar ] [ CrossRef ]
- لی، ی. دای، ا. گیباس، ال. Nießner, M. بازیابی شی به کمک پایگاه داده برای بازسازی سه بعدی بلادرنگ. نمودار کامپیوتری انجمن 2015 ، 34 ، 435-446. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شوینگ، AG; هازان، ت. پولفیس، ام. Urtasun، R. پیش بینی ساختار یافته کارآمد برای درک صحنه های داخلی سه بعدی. در مجموعه مقالات کنفرانس IEEE 2012 در مورد دید کامپیوتری و تشخیص الگو، پراویدنس، RI، ایالات متحده آمریکا، 16-21 ژوئن 2012. صص 2815–2822. [ Google Scholar ]
- هاندا، ا. ویلان، تی. مک دونالد، جی. دیویسون، AJ معیاری برای کیلومتر شماری بصری RGB-D، بازسازی سه بعدی و SLAM. در مجموعه مقالات کنفرانس بین المللی IEEE 2014 در مورد رباتیک و اتوماسیون (ICRA)، هنگ کنگ، چین، 31 مه تا 7 ژوئن 2014. صص 1524-1531. [ Google Scholar ]
- استورم، جی. انگلهارد، ن. اندرس، اف. بورگارد، دبلیو. Cremers, D. معیاری برای ارزیابی سیستم های RGB-D SLAM. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2012 در مورد ربات ها و سیستم های هوشمند، ویلامورا، پرتغال، 7 تا 12 اکتبر 2012. صص 573-580. [ Google Scholar ]
- بوری، م. نیکولیک، جی. گوهل، پ. اشنایدر، تی. رهدر، جی. عمری، س. آچتلیک، مگاوات؛ Siegwart, R. مجموعه داده های وسایل نقلیه هوایی میکرو EuRoC. بین المللی ربات جی. Res. 2016 ، 35 ، 1157-1163. [ Google Scholar ] [ CrossRef ]
- وانگ، سی. دای، ی. الشیمی، ن. ون، سی. رتسچر، جی. کانگ، ز. Lingua، A. پیشرفت در معیار Isprs در نقشه برداری و موقعیت یابی چندحسی داخلی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، XLII-2/W13 ، 1709–1713. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خوشلحم، ک. ویلارینو، LD; پیتر، م. کانگ، ز. آچاریا، دی. معیار Isprs در مدلسازی فضای داخلی. بین المللی قوس. فتوگرام سناتور از راه دور اسپات. Inf. علمی 2017 ، 42 ، 367-372. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آهنگ ها.؛ لیختنبرگ، SP; Xiao, J. Sun rgb-d: مجموعه معیار درک صحنه rgb-d. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. صص 567-576. [ Google Scholar ]
- دای، ا. چانگ، تبر. ساوا، م. هالبر، ام. فانک هاسر، تی. Nießner, M. Scannet: بازسازی های سه بعدی با حاشیه نویسی غنی از صحنه های داخلی. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، بارسلون، اسپانیا، 6 تا 13 نوامبر 2011. صص 5828–5839. [ Google Scholar ]
- سیلبرمن، ن. Fergus, R. تقسیمبندی صحنه داخلی با استفاده از حسگر نور ساختاریافته. در مجموعه مقالات کنفرانس بین المللی IEEE 2011 در کارگاه های بینایی کامپیوتری (کارگاه های آموزشی ICCV)، بارسلون، اسپانیا، 6 تا 13 نوامبر 2011. ص 601-608. [ Google Scholar ]
- سیلبرمن، ن. هویم، دی. کهلی، پ. Fergus, R. تقسیم بندی داخلی و استنتاج پشتیبانی از تصاویر rgbd. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2012. [ Google Scholar ]
- ارمنی، من. ساکس، اس. ضمیر، ع. Savarese، S. داده های معنایی 2 بعدی-3 بعدی مشترک برای درک صحنه های داخلی. arXiv 2017 , arXiv:1702.01105. [ Google Scholar ]
- چانگ، آ. دای، ا. فانک هاسر، تی. هالبر، ام. نیسنر، ام. ساوا، م. آهنگ ها.؛ زنگ، ا. Zhang، Y. Matterport3d: یادگیری از دادههای rgb-d در محیطهای داخلی. arXiv 2017 , arXiv:1709.06158. [ Google Scholar ]
- مارک، جی دبلیو. محمد، ع. vd Houwen، E. van Heijster, R. رادار داخلی SLAM یک برنامه راداری برای دید و محیط های فاقد GPS. در مجموعه مقالات کنفرانس رادار اروپا 2013، نورنبرگ، آلمان، 9 تا 11 اکتبر 2013. ص 471-474. [ Google Scholar ]
- ون دایک، تی. de Croon, GC چگونه شبکه های عصبی عمق را در تصاویر منفرد می بینند؟ در مجموعه مقالات کنفرانس بین المللی IEEE در مورد بینایی رایانه، سئول، کره، 27 تا 28 اکتبر 2019؛ صص 2183-2191. [ Google Scholar ]
- لیو، ام. سالزمن، ام. او، X. تخمین عمق گسسته-پیوسته از یک تصویر واحد. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، کلمبوس، OH، ایالات متحده آمریکا، 23 تا 28 ژوئن 2014. صص 716-723. [ Google Scholar ]
- ژو، دبلیو. سالزمن، ام. او، X. لیو، ام. تجزیه و تحلیل ساختار صحنه داخلی برای تخمین عمق تصویر تک. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. صص 614-622. [ Google Scholar ]
- ادر، م. مولون، پ. Guan, L. Pano Popups: Reconstruction 3D indoor with a Plane-Aware Network. در مجموعه مقالات کنفرانس بین المللی 2019 در 3D Vision (3DV)، کبک، QC، کانادا، 16-19 سپتامبر 2019؛ صص 76-84. [ Google Scholar ]
- روی، ا. تخمین عمق تک چشمی Todorovic، S. با استفاده از جنگل رگرسیون عصبی. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 27-30 ژوئن 2016. صص 5506-5514. [ Google Scholar ]
- لیو، اف. شن، سی. لین، جی. میدان های عصبی کانولوشنال عمیق برای تخمین عمق از یک تصویر واحد. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. صص 5162–5170. [ Google Scholar ]
- گلدلوکه، بی. اوبری، ام. کولف، ک. Cremers, D. چارچوبی با وضوح فوق العاده برای بازسازی چند نمای با دقت بالا. بین المللی جی. کامپیوتر. Vis. 2014 ، 106 ، 172-191. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کالینز، RT یک رویکرد فضایی برای تطبیق واقعی چند تصویر. در مجموعه مقالات کنفرانس CVPR IEEE Computer Society on Computer Vision and Pattern Recognition، سانفرانسیسکو، CA، ایالات متحده آمریکا، 18-20 ژوئن 1996. صص 358-363. [ Google Scholar ]
- فوروکاوا، ی. پونس، جی. استریوپسی چند نمای دقیق، متراکم و قوی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2009 ، 32 ، 1362-1376. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- گالیانی، اس. لاسینجر، ک. شیندلر، ک. استریوپسی چند نمای موازی انبوه توسط انتشار نرمال سطحی. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، لاس کوندس، شیلی، 11 تا 18 دسامبر 2015. صص 873-881. [ Google Scholar ]
- لانگگوث، اف. سونکاوالی، ک. حداپ، س. Goesele، M. استریو چند نمای سایه آگاه. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2016. [ Google Scholar ]
- هانه، سی. زک، سی. کوهن، ا. Pollefeys، M. بازسازی سه بعدی معنایی متراکم. IEEE Trans. الگوی مقعدی ماخ هوشمند 2016 ، 39 ، 1730-1743. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- اولمن، اس. تفسیر ساختار از حرکت. Proc. R. Soc. لندن. سر. B Biol. علمی 1979 ، 203 ، 405-426. [ Google Scholar ]
- هارتمن، دبلیو. گالیانی، اس. هاولنا، م. ون گول، ال. شیندلر، کی. شباهت چند پچ را یاد گرفت. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ صفحات 1586-1594. [ Google Scholar ]
- جی، م. گال، جی. ژنگ، اچ. لیو، ی. Fang, L. Surfacenet: یک شبکه عصبی سه بعدی سرتاسر برای استریوپسی چند نمای. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ صص 2307–2315. [ Google Scholar ]
- هوانگ، P.-H. ماتزن، ک. کوپف، جی. آهوجا، ن. هوانگ، J.-B. Deepmvs: یادگیری استریوپسی چند نما. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ ص 2821-2830. [ Google Scholar ]
- یائو، ی. لو، ز. لی، اس. نیش، تی. Quan، L. Mvsnet: استنتاج عمق برای استریو چند نمای بدون ساختار. در مجموعه مقالات کنفرانس اروپایی بینایی کامپیوتر (ECCV)، مونیخ، آلمان، 8 تا 14 سپتامبر 2018؛ صص 767-783. [ Google Scholar ]
- یائو، ی. لو، ز. لی، اس. شن، تی. نیش، تی. Quan, L. Mvsnet مکرر برای استنتاج عمق استریو چند نمای با وضوح بالا. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019؛ صص 5525–5534. [ Google Scholar ]
- بیلی، تی. Durrant-Whyte, H. محلی سازی و نقشه برداری همزمان (SLAM): قسمت دوم. ربات IEEE. خودکار Mag. 2006 ، 13 ، 108-117. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آوینا، ا. دیوی، م. مدلسازی سه بعدی هرناندز AM با حسگر لیزری متحرک برای محیطهای داخلی. IFAC Proc. جلد 2014 ، 47 ، 7604-7609. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سالاس-مورنو، RF; نیوکمب، RA؛ استراسدات، اچ. کلی، پی اچ. Davison, AJ Slam++: محلی سازی و نقشه برداری همزمان در سطح اشیا. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، پورتلند، OR، ایالات متحده آمریکا، 23 تا 28 ژوئن 2013. صص 1352–1359. [ Google Scholar ]
- دیویسون، ای جی؛ رید، شناسه; مولتون، ND; Stasse, O. MonoSLAM: SLAM تک دوربینی بیدرنگ. IEEE Trans. الگوی مقعدی ماخ هوشمند 2007 ، 29 ، 1052-1067. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- شولز، وی.اچ. Bombardelli، FG; Todt، E. یک SoC با FPGA Landmark Acquisition System برای دوچشمی Visual SLAM. در مجموعه مقالات دوازدهمین سمپوزیوم رباتیک آمریکای لاتین 2015 و سومین سمپوزیوم رباتیک برزیل در سال 2015 (LARS-SBR)، اوبرلندیا، برزیل، 28 اکتبر 28 تا 1 نوامبر 2015؛ صص 336-341. [ Google Scholar ]
- لئونارد، جی جی; بومی سازی ربات دورنت-وایت، HF Mobile با ردیابی چراغ های هندسی. IEEE Trans. ربات. خودکار 1991 ، 7 ، 376-382. [ Google Scholar ] [ CrossRef ]
- گومز اوجدا، آر. بریالز، جی. Gonzalez-Jimenez, J. PL-SVO: Odometry بصری تک چشمی نیمه مستقیم با ترکیب نقاط و پاره خط. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2016 در مورد ربات ها و سیستم های هوشمند (IROS)، Daejeon، کره، 9 تا 14 اکتبر 2016؛ صص 4211-4216. [ Google Scholar ]
- پومارولا، ا. واخیتوف، آ. آگودو، ا. سانفلیو، ا. Moreno-Noguer، F. PL-SLAM: SLAM تصویری تک چشمی در زمان واقعی با نقاط و خطوط. در مجموعه مقالات کنفرانس بین المللی IEEE 2017 در مورد رباتیک و اتوماسیون (ICRA)، سنگاپور، 29 مه تا 3 ژوئن 2017؛ ص 4503-4508. [ Google Scholar ]
- وانگ، آر. دی، ک. وان، دبلیو. وانگ، ی. روش SLAM تصویری مبتنی بر ویژگی نقطهای بهبود یافته برای صحنههای داخلی. Sensors 2018 , 18 , 3559. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بومن، اس ال. آتاناسوف، ن. دانیلیدیس، ک. پاپاس، GJ ارتباط داده های احتمالی برای اسلم معنایی. در مجموعه مقالات کنفرانس بین المللی IEEE 2017 در مورد رباتیک و اتوماسیون (ICRA)، سنگاپور، 29 مه تا 3 ژوئن 2017؛ صفحات 1722-1729. [ Google Scholar ]
- بنابراین، سی. باچیو، جی. Sun, H. بازسازی ساختمان های مجازی سه بعدی از پلان های معماری دوبعدی. در مجموعه مقالات سمپوزیوم ACM در نرم افزار و فناوری واقعیت مجازی، تایپه، تایوان، 2 تا 5 نوامبر 1998. ص 17-23. [ Google Scholar ]
- لو، تی. تای، سی.-ال. بائو، ال. سو، اف. Cai, S. بازسازی سه بعدی ساختمان های دقیق از نقشه های معماری. محاسبه کنید. به دس کمک کرد. Appl. 2005 ، 2 ، 527-536. [ Google Scholar ] [ CrossRef ]
- لی، اس. فنگ، دی. گریم، سی. Gooch, B. یک رابط کاربری مبتنی بر طرح برای بازسازی نقشه های معماری. محاسبه کنید. نمودار. انجمن 2008 ، 27 ، 81-90. [ Google Scholar ] [ CrossRef ]
- هورنا، اس. منوو، دی. دامیاند، جی. برتراند، ی. محدودیت های سازگاری و بازسازی ساختمان سه بعدی. محاسبه کنید. به دس کمک کرد. 2009 ، 41 ، 13-27. [ Google Scholar ] [ CrossRef ]
- لی، تی. شو، بی. کیو، ایکس. Wang, Z. بازسازی کارآمد از نقشه های معماری. بین المللی جی. کامپیوتر. Appl. تکنولوژی 2010 ، 38 ، 177-184. [ Google Scholar ] [ CrossRef ]
- یین، ایکس. ونکا، پی. رازدان، ع. تولید مدل های ساختمان سه بعدی از نقشه های معماری: یک بررسی. محاسبات IEEE. نمودار. Appl. 2008 ، 29 ، 20-30. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- نینگ، ایکس. ما، جی. Lv، Z. خو، Q. Wang, Y. بازسازی ساختار صحنه داخلی از اسکنر لیزری زمینی. در کنفرانس بین المللی آموزش و بازی های الکترونیکی ؛ Springer: برلین/هایدلبرگ، آلمان، 2018. [ Google Scholar ]
- ادلسبرونر، اچ. اشکال آلفا-یک بررسی. Tesselations Sci. 2010 ، 27 ، 1-25. [ Google Scholar ]
- پرویتالی، م. دیاز-ویلارینو، ال. Scaioni، M. بازسازی ساختمان داخلی از ابرهای نقطه مسدود با استفاده از برش نمودار و ردیابی پرتو. Appl. علمی 2018 ، 8 ، 1529. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کانگ، ز. ژونگ، آر. وو، آ. شی، ز. Luo, Z. یک روش برازش ویژگی مسطح کارآمد با استفاده از سادهسازی ابر نقطه و BaySAC مستقل از آستانه. IEEE Geosci. سنسور از راه دور Lett. 2016 ، 13 ، 1842-1846. [ Google Scholar ] [ CrossRef ]
- یونگ، جی. هونگ، اس. جونگ، اس. کیم، اس. چو، اچ. هونگ، اس. Heo, J. مدلسازی مولد برای توسعه BIM ساخته شده سازه های داخلی موجود. خودکار ساخت و ساز 2014 ، 42 ، 68-77. [ Google Scholar ] [ CrossRef ]
- وانگ، سی. چو، YK; Kim, C. استخراج خودکار اجزای BIM از ابرهای نقطه ای ساختمان های موجود برای کاربردهای پایداری. خودکار ساخت و ساز 2015 ، 56 ، 1-13. [ Google Scholar ] [ CrossRef ]
- شی، دبلیو. احمد، دبلیو. لی، ن. فن، دبلیو. شیانگ، اچ. وانگ، ام. مدلسازی هندسی معنایی ابر نقطهای داخلی بدون ساختار. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 9. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- هونگ، اس. یونگ، جی. کیم، اس. چو، اچ. لی، جی. Heo, J. رویکرد نیمه خودکار به نقشه برداری داخلی برای مدل سازی اطلاعات ساختمان سه بعدی. محاسبه کنید. محیط زیست سیستم شهری 2015 ، 51 ، 34-46. [ Google Scholar ] [ CrossRef ]
- Michailidis، G.-T. Pajarola, R. Bayesian Graph-Cut بهینه سازی برای بازسازی سطوح دیوار در محیط های داخلی. Vis. محاسبه کنید. 2017 ، 33 ، 1347–1355. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مورا، سی. ماتاوش، او. ویلانووا، ای جی; گوبتی، ای. Pajarola, R. تشخیص و بازسازی خودکار اتاق در محیط های داخلی درهم و برهم با چیدمان اتاق های پیچیده. محاسبه کنید. نمودار. 2014 ، 44 ، 20-32. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تانگ، اس. ژانگ، ی. لی، ی. یوان، ز. وانگ، ی. ژانگ، ایکس. لی، ایکس. ژانگ، ی. گوا، آر. Wang, W. بازسازی سریع و خودکار نقشههای داخلی سه بعدی غنی از لحاظ معنایی از دنبالههای RGB-D با کیفیت پایین. Sensors 2019 , 19 , 533. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، آر. زی، ال. Chen, D. مدلسازی فضاهای داخلی با استفاده از تجزیه و بازسازی عناصر ساختاری. فتوگرام مهندس Remote Sens. 2017 , 83 , 827–841. [ Google Scholar ] [ CrossRef ]
- لی، ال. سو، اف. یانگ، اف. زو، اچ. لی، دی. زو، ایکس. لی، اف. لیو، ی. Ying, S. بازسازی فضای داخلی داخلی سه بعدی (3 بعدی) با داستان های متعدد از طریق تقسیم بندی جامع. Remote Sens. 2018 , 10 , 1281. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پانگ، ی. ژانگ، سی. ژو، ال. لین، بی. Lv, G. استخراج اطلاعات فضای داخلی در محیط های پیچیده ساختمان. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 321. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چن، جی. Chen, B. مدلسازی معماری از دادههای محدوده اسکن شده پراکنده. بین المللی جی. کامپیوتر. Vis. 2008 ، 78 ، 223-236. [ Google Scholar ] [ CrossRef ]
- چن، ک. لای، ی. وو، Y.-X. مارتین، آر.آر. هو، اس.-م. مدلسازی معنایی خودکار صحنههای داخلی از دادههای RGB-D با کیفیت پایین با استفاده از اطلاعات متنی. ACM Trans. نمودار. 2014 ، 33 ، 208. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیو، ز. ژانگ، ی. وو، دبلیو. لیو، ک. Sun, Z. مدلسازی صحنههای داخلی مبتنی بر مدل از یک تصویر واحد. در مجموعه مقالات چهل و یکمین کنفرانس رابط گرافیکی، هالیفاکس، NS، کانادا، 3 تا 5 ژوئن 2015. [ Google Scholar ]
- تران، اچ. خوشلحم، ک. کیلی، الف. مقایسه هندسی و ارزیابی کیفیت مدلهای سه بعدی محیطهای داخلی. ISPRS J. Photogramm. Remote Sens. 2019 ، 149 ، 29–39. [ Google Scholar ] [ CrossRef ]
- چن، جی. شائو، جی. ژانگ، دی. Wu, X. یک روش سریع سرتاسری با انتقال سبک برای تخمین چیدمان اتاق. در مجموعه مقالات کنفرانس بین المللی IEEE 2019 در چند رسانه ای و نمایشگاه (ICME)، شانگهای، چین، 8 تا 12 ژوئیه 2019؛ ص 964-969. [ Google Scholar ]
- فرناندز-لابرادور، سی. Facil, JM; پرز-یوس، آ. دمونسو، سی. سیورا، جی. Guerrero، JJ Corners for Layout: End-to-End Layout Recovery از 360 عکس. arXiv 2019 ، arXiv:1903.08094. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لین، اچ جی; هوانگ، جنوب غربی؛ لای، SH; چیانگ، CK تخمین چیدمان صحنه داخلی از یک تصویر واحد. در مجموعه مقالات بیست و چهارمین کنفرانس بینالمللی شناسایی الگو (ICPR)، پکن، چین، 20 تا 24 اوت 2018. [ Google Scholar ]
- ژانگ، دبلیو. ژانگ، دبلیو. لیو، ک. Gu, J. آموزش پیشبینی نقشههای لبه با کیفیت بالا برای تخمین چیدمان اتاق. IEEE Trans. چندتایی. 2016 ، 19 ، 935-943. [ Google Scholar ] [ CrossRef ]
- لی، سی.-ای. بدرینارایانان، وی. مالیزیویچ، تی. Rabinovich، A. Roomnet: تخمین چیدمان اتاق انتها به انتها. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ صص 4865-4874. [ Google Scholar ]
- زو، سی. کولبرن، ا. شان، Q. Doiem, D. Layoutnet: بازسازی طرح اتاق سه بعدی از یک تصویر rgb. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018. [ Google Scholar ]
- هداو، وی. هویم، دی. فورسیث، دی. بازیابی چیدمان فضایی اتاق های بهم ریخته. در مجموعه مقالات دوازدهمین کنفرانس بین المللی IEEE در سال 2009 در بینایی کامپیوتر، کیوتو، ژاپن، 29 سپتامبر تا 2 اکتبر 2009. [ Google Scholar ]
- چائو، Y.-W. چوی، دبلیو. پانتوفارو، سی. Savarese، S. تخمین چیدمان صحنه های داخلی بسیار درهم و برهم با استفاده از نشانه های هندسی و معنایی. در کنفرانس بین المللی تحلیل و پردازش تصویر ; Springer: برلین/هایدلبرگ، آلمان، 2013. [ Google Scholar ]
- پارک، اس.-جی. هونگ، ک.-اس. بازیابی یک چیدمان سه بعدی داخلی با تقسیم بندی معنایی بالا به پایین از یک تصویر واحد. تشخیص الگو Lett. 2015 ، 68 ، 70-75. [ Google Scholar ] [ CrossRef ]
- مالیا، ع. Lazebnik، S. یادگیری نقشه های لبه آموزنده برای پیش بینی طرح صحنه های داخلی. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، لاس کوندس، شیلی، 11 تا 18 دسامبر 2015. ص 936-944. [ Google Scholar ]
- جهرمی، ع.ب. Sohn, G. Edge مبتنی بر مدلسازی سه بعدی راهروی داخلی با استفاده از یک تصویر واحد. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، 2 . [ Google Scholar ]
- هیرزر، م. راث، PM؛ Lepetit، V. Smart Hypothesis Generation برای تخمین چیدمان اتاق کارآمد و مقاوم. arXiv 2019 ، arXiv:1910.12257. [ Google Scholar ]
- چانگ، اچ.-سی. هوانگ، S.-H. لای، اس.-اچ. استفاده از سازگاری خط برای تخمین طرحبندی صحنه منهتن داخلی سه بعدی از یک تصویر واحد. در مجموعه مقالات کنفرانس بین المللی IEEE 2015 در مورد پردازش تصویر (ICIP)، کبک، QC، کانادا، 27-30 سپتامبر 2015. صص 4723-4727. [ Google Scholar ]
- کروژیلوف، آی. رومانوف، م. کونوشین، الف. شبکه اصلاح دوگانه برای تخمین چیدمان اتاق. در کنفرانس آسیایی شناخت الگو . Springer: Cham، سوئیس، 2019. [ Google Scholar ]
- گوپتا، ا. هیبرت، ام. کاناد، تی. Blei, DM برآورد چیدمان فضایی اتاق ها با استفاده از استدلال حجمی در مورد اشیا و سطوح. در پیشرفت در سیستم های پردازش اطلاعات عصبی ; Curran Associates, Inc., 2010; ص 1288-1296. در دسترس آنلاین: https://papers.nips.cc/paper/4120-estimating-spatial-layout-of-rooms-using-volumetric-reasoning-about-objects-and-surfaces.pdf (در 17 مه 2020 قابل دسترسی است).
- دل پرو، ال. بودیش، جی. فرید، دی. کرمگرد، بی. هارتلی، ای. مدلسازی هندسی بیزی از صحنه های داخلی بارنارد، کی. در مجموعه مقالات کنفرانس IEEE 2012 در مورد دید کامپیوتری و تشخیص الگو، پراویدنس، RI، ایالات متحده آمریکا، 16-21 ژوئن 2012. صص 2719-2726. [ Google Scholar ]
- شوینگ، AG; فیدلر، اس. پولفیس، ام. Urtasun, R. Box in the box: Joint 3D layout و استدلال شی از تصاویر منفرد. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، سیدنی، استرالیا، 1-8 دسامبر 2013. صص 353-360. [ Google Scholar ]
- ژانگ، جی. کان، سی. شوینگ، AG; Urtasun, R. برآورد طرح سه بعدی صحنه های داخلی و درهم ریختگی آن از سنسورهای عمق. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، سیدنی، استرالیا، 1-8 دسامبر 2013. ص 1273-1280. [ Google Scholar ]
- بائو، سی. فورلان، ا. فی فی، ال. Savarese, S. درک طرحبندی سهبعدی یک اتاق به هم ریخته از چندین تصویر. در مجموعه مقالات کنفرانس زمستانی IEEE در مورد کاربردهای بینایی کامپیوتری، Steamboat Springs، CO، ایالات متحده آمریکا، 24-26 مارس 2014. صص 690-697. [ Google Scholar ]
- ژانگ، دبلیو. ژانگ، دبلیو. Gu, J. استراتژی یادگیری معنایی لبه برای تخمین چیدمان در محیط داخلی. IEEE Trans. سایبرن. 2020 ، 50 ، 2730–2739. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- کوهن، ا. شونبرگر، جی ال. Speciale، P. ساتلر، تی. فرام، ج.-م. Pollefeys، M. تراز بازسازی سه بعدی داخلی-خارجی. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2016; صص 285-300. [ Google Scholar ]
- کخ، تی. کورنر، ام. Fraundorfer, F. تراز خودکار مدل های ساختمان های داخلی و خارجی با استفاده از بخش های خط سه بعدی. در مجموعه مقالات کنفرانس IEEE در کارگاه های آموزشی بینایی رایانه و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 26 ژوئن تا 1 ژوئیه 2016. [ Google Scholar ]
- خان، ش. بن نامون، م. سهل، ف. Togneri، R. برچسبگذاری معنایی مبتنی بر هندسه صحنههای داخلی. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2014. [ Google Scholar ]
- رن، ایکس. بو، ال. Fox, D. Rgb-(d) برچسب زدن صحنه: ویژگی ها و الگوریتم ها. در مجموعه مقالات کنفرانس IEEE 2012 در مورد دید کامپیوتری و تشخیص الگو، پراویدنس، RI، ایالات متحده آمریکا، 16-21 ژوئن 2012. صص 2759-2766. [ Google Scholar ]
- گوپتا، اس. اربلائز، پ. Malik, J. سازماندهی ادراکی و تشخیص صحنه های داخلی از تصاویر RGB-D. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، پورتلند، OR، ایالات متحده آمریکا، 23 تا 28 ژوئن 2013. صص 564-571. [ Google Scholar ]
- مولر، AC; Behnke، S. یادگیری زمینه های تصادفی شرطی حساس به عمق برای تقسیم بندی معنایی تصاویر RGB-D. در مجموعه مقالات کنفرانس بین المللی IEEE 2014 در مورد رباتیک و اتوماسیون (ICRA)، هنگ کنگ، چین، 31 مه تا 7 ژوئن 2014. صص 6232–6237. [ Google Scholar ]
- دنگ، ز. تودوروویچ، اس. Jan Latecki، L. بخشبندی معنایی تصاویر rgbd با محدودیتهای mutex. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، لاس کوندس، شیلی، 11 تا 18 دسامبر 2015. صفحات 1733-1741. [ Google Scholar ]
- فارابت، سی. کوپری، سی. نجمان، ل. LeCun, Y. یادگیری ویژگی های سلسله مراتبی برای برچسب زدن صحنه. IEEE Trans. الگوی مقعدی ماخ هوشمند 2012 ، 35 ، 1915-1929. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- گیرشیک، آر. دوناهو، جی. دارل، تی. Malik, J. Rich دارای سلسله مراتب برای تشخیص دقیق شی و تقسیم بندی معنایی هستند. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، کلمبوس، OH، ایالات متحده آمریکا، 23 تا 28 ژوئن 2014. صص 580-587. [ Google Scholar ]
- گوپتا، اس. گیرشیک، آر. آربلاز، پ. Malik, J. یادگیری ویژگی های غنی از تصاویر RGB-D برای تشخیص و تقسیم بندی اشیا. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2014. [ Google Scholar ]
- چن، L.-C.; پاپاندرو، جی. کوکینوس، آی. مورفی، ک. Yuille، تقسیمبندی تصویر معنایی AL با شبکههای پیچیده عمیق و crfهای کاملاً متصل. arXiv 2014 ، arXiv:1412.7062. [ Google Scholar ]
- لانگ، جی. شلهامر، ای. دارل، تی. شبکه های کاملاً پیچیده برای تقسیم بندی معنایی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. صص 3431–3440. [ Google Scholar ]
- بدرینارایانان، وی. کندال، ا. Cipolla، R. Segnet: یک معماری رمزگذار-رمزگشای پیچیده پیچیده برای تقسیمبندی تصویر. IEEE Trans. الگوی مقعدی ماخ هوشمند 2017 ، 39 ، 2481-2495. [ Google Scholar ] [ CrossRef ]
- لی، ی. بو، ر. سان، م. وو، دبلیو. دی، ایکس. Chen, B. Pointcnn: Convolution on x-transformed points. در مجموعه مقالات پیشرفتها در سیستمهای پردازش اطلاعات عصبی، مونترال، QC، کانادا، 3 تا 8 دسامبر 2018؛ صص 820-830. [ Google Scholar ]
- Qi، CR; سو، اچ. مو، ک. Guibas، LJ Pointnet: یادگیری عمیق در مجموعه های نقطه برای طبقه بندی و تقسیم بندی سه بعدی. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ صص 652-660. [ Google Scholar ]
- حاضرباس، ج. ما، ال. دوموکوس، سی. Cremers، D. Fusenet: گنجاندن عمق در تقسیم بندی معنایی از طریق معماری cnn مبتنی بر فیوژن. در کنفرانس آسیایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2016. [ Google Scholar ]
- جیانگ، جی. ژانگ، ز. هوانگ، ی. Zheng, L. گنجاندن عمق در هر دو cnn و crf برای تقسیم بندی معنایی داخلی. در مجموعه مقالات هشتمین کنفرانس بین المللی IEEE 2017 در زمینه مهندسی نرم افزار و علوم خدمات (ICSESS)، پکن، چین، 24 تا 26 نوامبر 2017؛ صص 525-530. [ Google Scholar ]
- چنگ، ی. کای، آر. لی، ز. ژائو، ایکس. Huang، K. شبکههای دکانولوشن حساس به محل با همجوشی دروازهای برای تقسیمبندی معنایی داخلی rgb-d. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ ص 3029–3037. [ Google Scholar ]
- لین، دی. چن، جی. کوهن-اور، دی. هنگ، P.-A.; Huang، H. شبکه ویژگی آبشاری برای تقسیم معنایی تصاویر RGB-D. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ ص 1311–1319. [ Google Scholar ]
- لی، ی. ژانگ، جی. چنگ، ی. هوانگ، ک. Tan, T. ترکیب ویژگی های چند سطحی RGB-D با هدایت معنایی برای تقسیم بندی معنایی داخلی. در مجموعه مقالات کنفرانس بین المللی IEEE 2017 در مورد پردازش تصویر (ICIP)، پکن، چین، 17 تا 20 سپتامبر 2017؛ ص 1262–1266. [ Google Scholar ]
- جیانگ، جی. ژنگ، ال. لو، اف. Zhang، Z. Rednet: شبکه رمزگذار-رمزگشای باقیمانده برای بخش بندی معنایی rgb-d داخلی. arXiv 2018 , arXiv:1806.01054. [ Google Scholar ]
- گوا، ی. چن، تی. تقسیم بندی معنایی تصاویر RGBD بر اساس رگرسیون عمق عمیق. تشخیص الگو Lett. 2018 ، 109 ، 55-64. [ Google Scholar ] [ CrossRef ]
- کیم، ی. کانگ، اچ. لی، جی. توسعه مدل داده های فضایی داخلی با استفاده از CityGML ADE. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2013 ، 40 ، 41-45. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جمالی، ع. رحمان، ع.ا. بوگوسلاوسکی، پ. کومار، پی. Gold, CM مدلسازی سه بعدی خودکار شبکه ناوبری داخلی توپولوژیکی. جئوژورنال 2017 ، 82 ، 157–170. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تران، اچ. خوشلحم، ک. کیلی، ا. دیاز-ویلارینو، L. استخراج روابط توپولوژیکی بین فضاهای داخلی از ابرهای نقطه ای. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 4 ، 401. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Sarda، N. توسعه ساختار ناوبری برای ساختمان ها از مدل های معتبر 3D CityGML آنها. در مجموعه مقالات سومین کنفرانس بین المللی 2016 در مورد محاسبات برای توسعه پایدار جهانی (INDIACom)، دهلی نو، هند، 16-18 مارس 2016؛ صص 3341–3346. [ Google Scholar ]
- ترون، اس. Bücken, A. یکپارچه سازی نقشه های مبتنی بر شبکه و توپولوژیکی برای ناوبری روبات های سیار. در مجموعه مقالات کنفرانس ملی هوش مصنوعی، پورتلند، OR، ایالات متحده آمریکا، 4 تا 6 اوت 1996. [ Google Scholar ]
- جو، ک. لی، تی.-ک. بایک، اس. اوه، S.-Y. ایجاد نقشه توپولوژیکی از نقشه شبکه اشغال با استفاده از تشخیص درب مجازی. در مجموعه مقالات کنگره IEEE در محاسبات تکاملی، بارسلون، اسپانیا، 18 تا 23 ژوئیه 2010. [ Google Scholar ]
- پرتغال، دی. Rocha، RP استخراج اطلاعات توپولوژیکی از نقشه های شبکه برای ناوبری ربات. در مجموعه مقالات چهارمین کنفرانس بین المللی عوامل و هوش مصنوعی (ICAART-2012)، آلگاروه، پرتغال، 6-8 فوریه 2012. صص 137-143. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یانگ، ال. Worboys, M. Generation of Navigation graphs for space indoor. بین المللی جی. جغرافی. Inf. علمی 2015 ، 29 ، 1737-1756. [ Google Scholar ] [ CrossRef ]
- Sithole، G. نمودارهای مسیریابی فضای داخلی: دید، رمزگذاری، رمزگذاری و تضعیف. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، XLII-4 ، 579–585. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دمین، دی. بورو، ام. مسیریابی مبتنی بر مثلث بندی کارآمد. در مجموعه مقالات بیست و یکمین کنفرانس ملی هوش مصنوعی (AAAI 06)، بوستون، MA، ایالات متحده آمریکا، 16 تا 20 ژوئیه 2006. [ Google Scholar ]
- لی، ایکس. کلارامونت، سی. Ray, C. یک مدل مبتنی بر گراف شبکه ای برای تجزیه و تحلیل فضاهای داخلی دو بعدی. محاسبه کنید. محیط زیست سیستم شهری 2010 ، 34 ، 532-540. [ Google Scholar ] [ CrossRef ]
- گونزالس-آرجونا، دی. سانچز، آ. لوپز-کولینو، اف. دی کاسترو، آ. Garrido, J. نگاشت فضای داخلی شبکه اشغال ساده شده برای روبات های کم هزینه بهینه شده است. ISPRS Int. J. Geo-Inf. 2013 ، 2 ، 959-977. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خو، ام. وی، اس. زلاتانوا، اس. Zhang, R. برنامه ریزی مسیر داخلی مبتنی بر BIM با در نظر گرفتن موانع. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 417-423. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، دی. Lee, DL یک مدل مکان معنایی مبتنی بر شبکه برای ناوبری داخلی. در مجموعه مقالات نهمین کنفرانس بین المللی مدیریت داده های تلفن همراه (mdm 2008)، پکن، چین، 27-30 آوریل 2008; ص 17-24. [ Google Scholar ]
- لین، ز. خو، ز. هو، دی. هو، کیو. Li، W. مدل داده های مکانی ترکیبی برای فضای داخلی: توپولوژی و شبکه ترکیبی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 343. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لی، جی. لی، ک. زلاتانوا، اس. کلبه، تی. ناگل، سی. بکر، T. OGC IndoorGML – با اصلاحیه. 2016. در دسترس آنلاین: https://www.opengis.net/doc/IS/indoorgml/1.0 (در 17 مه 2020 قابل دسترسی است).
- خان، ا. دوناوبائر، آ. Kolbe، TH یک فرآیند تبدیل چند مرحلهای برای تولید خودکار نمودارهای مسیریابی داخلی از مدلهای ساختمانی سه بعدی معنایی. در مجموعه مقالات نهمین کنفرانس اطلاعات جغرافیایی سه بعدی، دبی، امارات متحده عربی، 11 تا 13 نوامبر 2014. [ Google Scholar ]
- میروهابی، س. عباسپور، RA استخراج خودکار مدل هسته IndoorGML از OpenStreetMap. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، 40 ، 459. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- زو، س. لی، ی. Xiong، Q. زلاتانوا، اس. دینگ، ی. ژانگ، ی. Zhou, Y. Gml مکان چند بعدی داخلی و کاربرد آن برای خدمات مکان یابی داخلی همه جا حاضر. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 220. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- تئو، T.-A. یو، اس.-سی. استخراج اطلاعات ساختمان های داخلی از Bim به Ogc Indoorgml. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 42 ، 167-170. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سریواستاوا، اس. ماهوشواریب، ن. Rajanc، K. به سوی تولید دادههای Indoorgml غنی از نظر معنایی از طرحهای معماری. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، 42 ، 4. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Tessema، LS; جگر، آر. Stilla، U. استخراج مدل IndoorGML از نقشه شبکه اشغال ساخته شده با استفاده از LiDAR 2D. در مجموعه مقالات انجمن آلمانی فتوگرامتری، سنجش از دور و اطلاعات جغرافیایی، سی و نهمین کنفرانس، وین، اتریش، فوریه 2020؛ در دسترس آنلاین: https://www.researchgate.net/publication/338690496_Extraction_of_IndoorGML_Model_from_an_Occupancy_Grid_Map_Constructed_Using_2D_LiDAR (در 17 مه 2020 قابل دسترسی است).
- کنتارینیس، ا. زیتونی، ک. مارینیکا، سی. وودیسلاو، دی. کوتزینوس، دی. به سوی یک مدل مسیر درونی معنایی. در مجموعه مقالات دومین کارگاه بین المللی “تجزیه و تحلیل داده های تحرک بزرگ” (BMDA) با EDBT، لیسبون، پرتغال، 26 مارس 2019. [ Google Scholar ]
- Flikweert، P. پیترز، آر. دیاز-ویلارینو، ال. ووت، آر. Staats، B. استخراج خودکار یک نمودار ناوبری در نظر گرفته شده برای Indoorgml از یک ابر نقطه داخلی. ISPRS Ann. فتوگرام سنسور از راه دور Spat.Inf. علمی 2019 ، 4 ، 271-278. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مرتاری، ف. کلمنتینی، ای. زلاتانوا، اس. لیو، ال. یک مدل ناوبری داخلی و استخراج شبکه آن. Appl. Geomat. 2019 ، 11 ، 413-427. [ Google Scholar ] [ CrossRef ]
- نیکوهمت، س. دیاکیته، آ. زلاتانوا، اس. Vosselman، G. مدلسازی سه بعدی داخلی و زیربخش فضای انعطافپذیر از Point Clouds. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، 4 ، 285-292. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کانگ، H.-K. لی، ک.-جی. یک مدل استاندارد داده فضایی داخلی – OGC IndoorGML و رویکردهای پیاده سازی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 116. [ Google Scholar ] [ CrossRef ]
- کیم، جی.اس. یو، اس.-جی. لی، ک.-جی. ادغام IndoorGML و CityGML برای فضای داخلی. در سمپوزیوم بین المللی وب و سیستم های اطلاعات جغرافیایی بی سیم ; Springer: برلین/هایدلبرگ، آلمان، 2014. [ Google Scholar ]
- لیو، ال. زلاتانوا، اس. زو، س. Li, K. به سوی ادغام IndoorGML و IndoorlocationGML برای برنامه های داخلی. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 4 ، 343. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- تانگ، ال. لی، ال. یینگ، اس. Lei, Y. مشخصات کامل سطح جزئیات برای مدلهای ساختمانهای سه بعدی با ترکیب صحنههای داخلی و خارجی. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 419. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- زنگ، ال. Kang, Z. شناسایی خودکار عناصر ناوبری داخلی از ابرهای نقطه کینکت. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 42 ، 431-437. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آلاتاس، ا. زلاتانوا، اس. ون اوستروم، پی. Chatzinikolaou، E. لمن، سی. لی، ک.-جی. پشتیبانی از ناوبری داخلی با استفاده از حقوق دسترسی به فضاها بر اساس استفاده ترکیبی از مدل های IndoorGML و LADM. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 384. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Diakité، AA; زلاتانوف، اس. لی، ک.-جی. درباره زیربخش فضاهای داخلی در Indoorgml. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، 4 ، 41-48. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مورا، سی. ویلانووا، ای جی; ماتاوش، او. گوبتی، ای. Pajarola, R. بازسازی محیط های داخلی مجتمع با جهت گیری های خودسرانه دیوار. یوروگراف. پوسترها 2014 ، 19 ، 38-40. [ Google Scholar ]
- ناکاگاوا، م. کاتائوکا، ک. یاماموتو، تی. شیوزکی، م. Ohhashi، T. استخراج چند ضلعی مبتنی بر رندر پانورامیک از دادههای Lidar موبایل داخلی. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 ، 2 ، 181-186. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مورا، سی. ماتاوش، او. پاجارولا، آر. محاسبه کنید. نمودار. انجمن 2016 ، 35 ، 179-188. [ Google Scholar ] [ CrossRef ]
- Hsiao، C.-W.; سان، سی. سان، م. چن، اچ.-تی. Flat2Layout: نمای مسطح برای تخمین چیدمان انواع اتاق های عمومی. arXiv 2019 ، arXiv:1905.12571. [ Google Scholar ]
- یانگ، ی. جین، اس. لیو، آر. بینگ کانگ، اس. Yu, J. مدلسازی خودکار صحنههای داخلی سهبعدی از یک پانوراما. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ صص 3926–3934. [ Google Scholar ]
- نکراسوف، وی. دارماسیری، ت. اسپک، ا. دراموند، تی. شن، سی. رید، I. تقسیم بندی معنایی مشترک و تخمین عمق با استفاده از حاشیه نویسی نامتقارن. در مجموعه مقالات کنفرانس بین المللی رباتیک و اتوماسیون 2019 (ICRA)، مونترال، QC، کانادا، 20 تا 24 مه 2019؛ صفحات 7101–7107. [ Google Scholar ]
- Sarlin، P.-E. کادنا، سی. سیگوارت، آر. Dymczyk، M. از درشت به ریز: محلی سازی سلسله مراتبی قوی در مقیاس بزرگ. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019؛ صص 12716–12725. [ Google Scholar ]
- ژائو، ز. چن، X. به سوی نگاشت معنایی سازگار مکانی-زمانی. در جام جهانی فوتبال ربات ; Springer: برلین/هایدلبرگ، آلمان، 2014. [ Google Scholar ]
- ژائو، ز. Chen, X. ساختن نقشههای معنایی سازگار زمانی برای صحنههای داخلی. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2015 در مورد ربات ها و سیستم های هوشمند (IROS)، هامبورگ، آلمان، 28 سپتامبر تا 2 اکتبر 2015؛ صص 88-95. [ Google Scholar ]
- گوپتا، اس. آربلاز، پ. گیرشیک، آر. Malik, J. درک صحنه های داخلی با تصاویر rgb-d: تقسیم بندی از پایین به بالا، تشخیص اشیا و تقسیم بندی معنایی. بین المللی جی. کامپیوتر. Vis. 2015 ، 112 ، 133-149. [ Google Scholar ] [ CrossRef ]
- لی، پی. تودوروویچ، اس. میدان عمیق زمانی مکرر برای برچسبگذاری معنایی ویدیو. در کنفرانس اروپایی بینایی کامپیوتر ; Springer: برلین/هایدلبرگ، آلمان، 2016. [ Google Scholar ]
- مصطفی، ع. کیم، اچ. Guillemaut, J.-Y.; هیلتون، A. بازسازی 4 بعدی منسجم زمانی صحنه های پویا پیچیده. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 26 ژوئن تا 1 ژوئیه 2016. صص 4660–4669. [ Google Scholar ]
- سلام.؛ Chiu، W.-C.; کیپر، ام. Fritz، M. Std2p: تقسیمبندی معنایی Rgbd با استفاده از ادغام مبتنی بر دادههای مکانی-زمانی. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ صص 4837–4846. [ Google Scholar ]
- بهلی، جی. گارباده، م. میلیوتو، ا. کوئنزل، جی. بهنکه، اس. استاکنیس، سی. گال، J. SemanticKITTI: مجموعه داده ای برای درک صحنه معنایی توالی های لیدار. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد بینایی رایانه، سئول، کره، 27 تا 28 اکتبر 2019؛ ص 9297–9307. [ Google Scholar ]
- چوی، سی. گواک، جی. Savarese, S. 4d convnets فضایی-زمانی: شبکه های عصبی کانولوشنال Minkowski. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019؛ ص 3075–3084. [ Google Scholar ]
- مصطفی، ع. هیلتون، الف. همبخشبندی منسجم معنایی و بازسازی صحنههای پویا. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ ص 422-431. [ Google Scholar ]
- پرویتالی، م. بارازتی، ال. برومانا، آر. Scaioni, M. Towards Towards Towards Towards Automatic Indoor Reconstruction of Indoor Indoor of the Estructury اتاق های ساختمان از ابرهای نقطه ای. ISPRS Ann. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 ، 2 ، 281-288. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تران، اچ. خوشلحم، ک. کیلی، ا. Díaz-Vilariño، L. Shape Grammar Approach به مدلسازی سه بعدی محیط های داخلی با استفاده از ابرهای نقطه ای. جی. کامپیوتر. مدنی مهندس 2019 , 33 , 04018055. [ Google Scholar ] [ CrossRef ]
- Diakité، AA; زلاتانوا، S. تقسیم بندی فضایی محیط های داخلی پیچیده برای ناوبری سه بعدی داخلی. بین المللی جی. جغرافی. Inf. علمی 2018 ، 32 ، 213-235. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ی. خو، دبلیو. تانگ، ی. Zhou، K. تجزیه و تحلیل ساختار آنلاین برای بازسازی صحنه داخلی در زمان واقعی. ACM Trans. نمودار. TOG 2015 ، 34 ، 1-13. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تئو، T.-A. چو، ک.-اچ. مدل شبکه داخلی مبتنی بر BIM برای برنامه ریزی مسیر ترکیبی داخلی و خارجی. Adv. مهندس آگاه کردن. 2016 ، 30 ، 268-282. [ Google Scholar ] [ CrossRef ]
- Vanclooster، A.; ون دی وگه، ن. De Maeyer, P. ادغام فضاهای داخلی و خارجی برای هدایت ناوبری عابر پیاده: بررسی. ترانس. GIS 2016 ، 20 ، 491-525. [ Google Scholar ] [ CrossRef ]
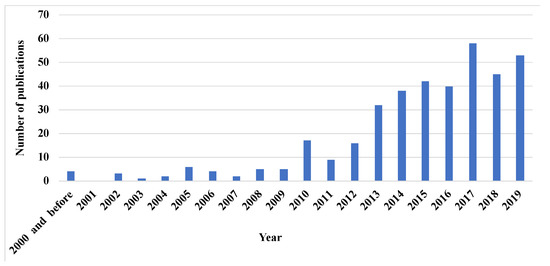
شکل 1. انتشار آمار مربوط به بازسازی سه بعدی (3 بعدی) محیط های داخلی.
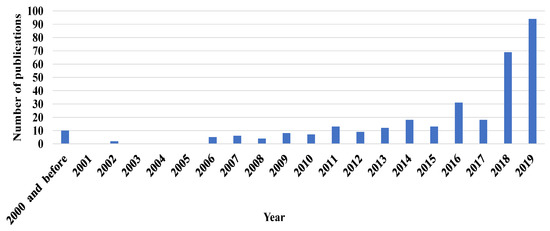
شکل 2. انتشار آمار مربوط به تخمین عمق تک چشمی.
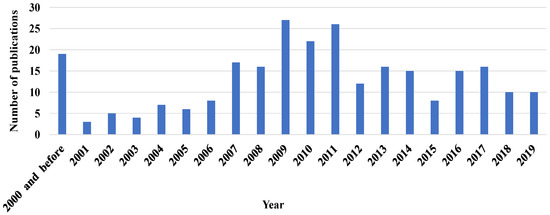
شکل 3. آمار انتشار مربوط به تخمین عمق چند نمای.
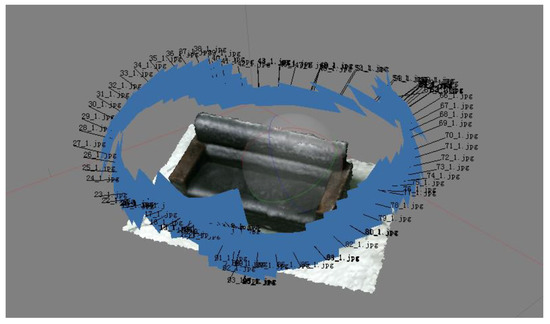
شکل 4. نمونه ای از بازسازی چند نمای.
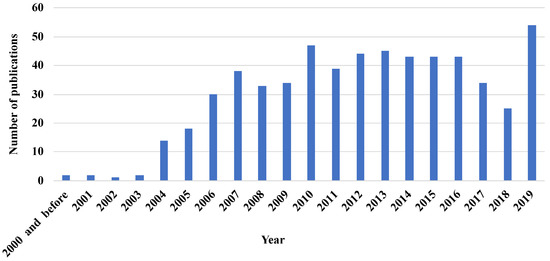
شکل 5. آمار انتشار مربوط به مکان یابی و نقشه برداری همزمان (SLAM).
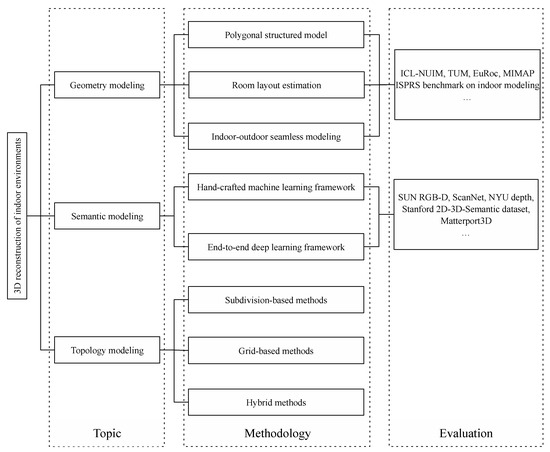
شکل 6. نمای کلی تکنیک برای بازسازی سه بعدی محیط های داخلی.
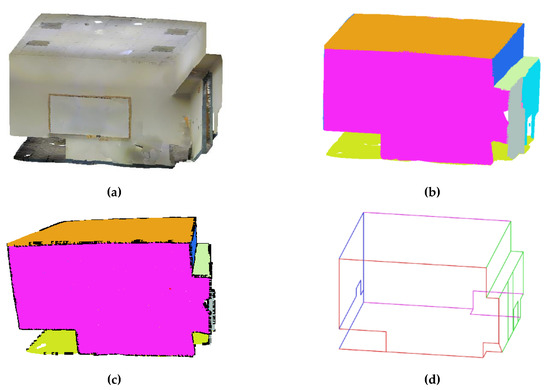
شکل 7. نمونه ای از روش استخراج عناصر ساختاری. ( الف ) ابرهای نقطه خام؛ ( ب ) تقسیم صفحه; ( ج ) استخراج مرز. ( د ) مدل نهایی وایرفریم. در ( b )، صفحات مختلف به طور تصادفی در رنگ های مختلف ارائه می شوند. در ( c )، نقاط مرزی استخراج شده به رنگ سیاه نشان داده می شوند.
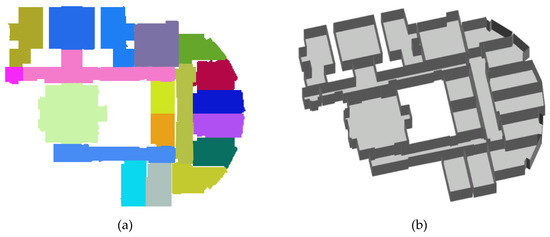
شکل 8. نمونه هایی از روش های تجزیه و بازسازی فضا. ( الف ) تجزیه فضایی؛ ( ب ) نتیجه بازسازی.
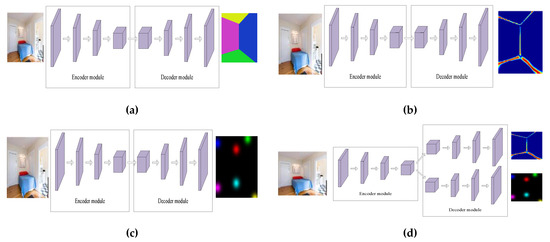
شکل 9. نمونه های معمولی از روش های مختلف. ( الف ) روشهای مبتنی بر ناحیه؛ ( ب ) روش های مبتنی بر لبه. ( ج ) روشهای مبتنی بر نقطه کلید (گوشه). ( د ) روش های ترکیبی.
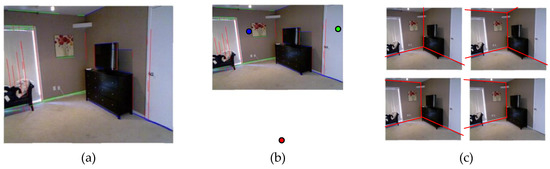
شکل 10. تصویری از روش مبتنی بر نقطه ناپدید شدن. ( الف ) قطعات خط شناسایی شده؛ ( ب ) نقاط ناپدید محاسبه شده. ( ج ) فرضیه های چیدمان اتاق. در ( a )، مجموعه ای از پاره خط ها شناسایی شده و برای یافتن نقاط ناپدید استفاده می شود. پارههای خط در ( a ) با استفاده از رنگهای مرتبط با نقاط ناپدید شدن آنها رنگ میشوند. سپس، چندین فرضیه چیدمان اتاق ایجاد می شود که می تواند توسط یک تابع اندازه گیری تعریف شده برای انتخاب بهینه رتبه بندی شود.
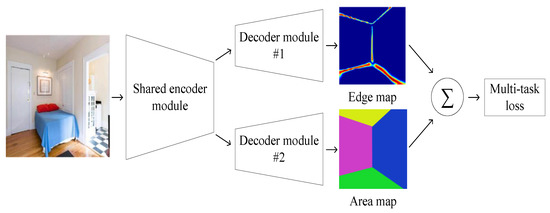
شکل 11. نمونه ای از ادغام چند وظیفه ای.
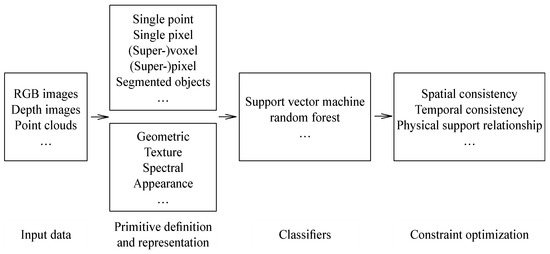
شکل 12. چارچوب طبقه بندی کلی بر اساس ویژگی های دست ساز.
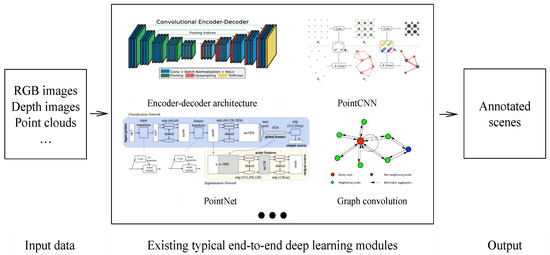
شکل 13. یک چارچوب طبقه بندی پایان به انتها بر اساس یادگیری عمیق. CNN، شبکه عصبی کانولوشنال.
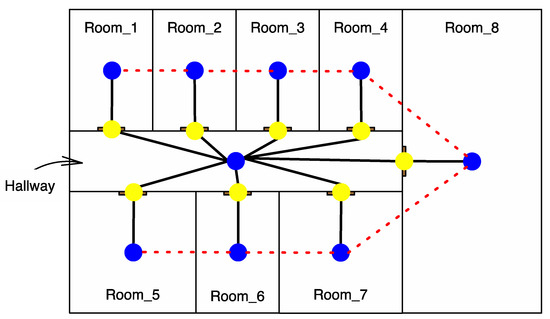
شکل 14. نمودار دوگانه نشان دهنده روابط اتصال (خطوط سیاه و سفید) و روابط مجاورت (خطوط چین دار قرمز).


بدون دیدگاه