

مسیریابی سه بعدی تخلیه آتش در داخل ساختمان
خلاصه

کلید واژه ها:
مسیریابی داخلی ؛ تخلیه اضطراری ؛ مدل سه بعدی داخلی ; ناوبری داخلی ؛ معناشناسی آتش
مسیریابی سه بعدی تخلیه آتش در داخل ساختمان
1. معرفی
2. آثار مرتبط
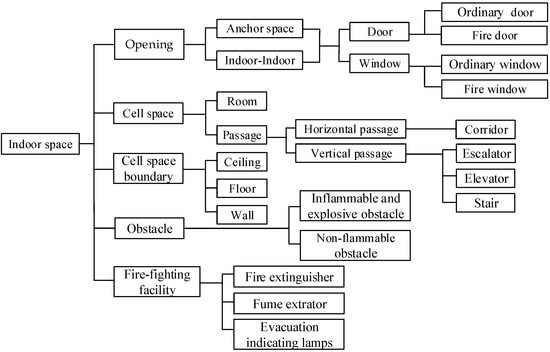
3. یک مدل داخلی گسترده برای تخلیه آتش
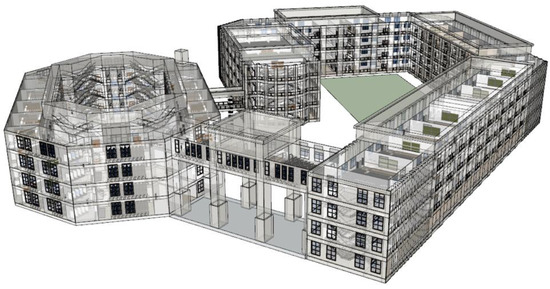
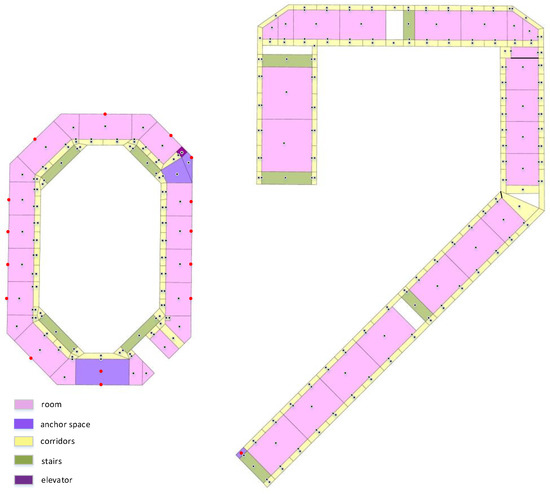
3.1. مدل فضای سه بعدی داخلی
https://gisland.org/3.2. ویژگی های آتش سوزی های داخلی در ساختمان ها
-
آتش به سرعت گسترش می یابد. در صورت آتش سوزی، دود می تواند به سرعت در راه پله ها، آسانسورها و سایر راهروهای عمودی پخش شود. در این زمان درها و پنجره های ضد حریق نصب شده در راه پله یا راهروی عمودی از اقدامات مهم پیشگیری از حریق هستند که می توانند از جریان دود احتراق در هنگام آتش سوزی جلوگیری کنند. شناسایی موقعیت مکانی این تاسیسات ساختمانی می تواند تا حدودی از گسترش آتش جلوگیری کرده و تخلیه ایمن را تضمین کند.
-
خطر بالا. فضای داخلی ساختمان های مدرن عموماً پرجمعیت و از نظر ساختار فضایی پیچیده است. برخی از موانع قابل اشتعال و انفجار هستند که در صورت آتش سوزی بسیار خطرناک می شوند. اگر مردم با توزیع خروجی های داخلی آشنا نباشند یا علائم تخلیه اضطراری در ساختمان وجود نداشته باشد، دشواری تخلیه افزایش می یابد.
-
مبارزه با آتش دشوار است. شناخته شده است که مبارزه با آتش از بیرون بسیار دشوار است. مردم عمدتاً از امکانات حفاظت آتش در داخل ساختمان برای خاموش کردن آتش استفاده می کنند [ 28 ]. در صورت نامشخص بودن مکان تاسیسات آتش نشانی در داخل ساختمان، آتش غیر قابل کنترل خواهد بود.
3.3. عوامل موثر بر مسیریابی در یک آتش سوزی داخلی
-
اجزای تخلیه
-
خروج و انتخاب مسیر
-
امنیت مسیر
3.4. گسترش قطعات برای سناریوهای آتش سوزی داخلی
-
از نظر اجزای داخلی که بر تخلیه در سناریوهای آتش سوزی داخلی تأثیر می گذارد، ما اجزای در و پنجره ضد حریق و اجزای تأسیسات آتش نشانی را گسترش می دهیم. درب ها و پنجره های نسوز اجزای ساختمانی هستند که می توانند الزامات پایداری مقاومت در برابر آتش، یکپارچگی و عایق حرارتی را در مدت زمان معین برآورده کنند. اینها شامل اشیاء مقاوم در برابر آتش با مقاومت خاصی در برابر آتش است که در یک اتاق جداکننده مقاوم در برابر آتش، راه پله های تخلیه و شفت های عمودی چیده شده اند. برای امکانات آتش نشانی، ما تعداد کپسول های آتش نشانی، وسایل پیشگیری از دود و اگزوز و علائم انحراف آتش را افزایش می دهیم.
-
از نظر انتخاب خروجی اضطراری برای سناریوهای آتش سوزی داخلی، اجزای خروجی پنجره را در فضای لنگر گسترش می دهیم. فضای لنگر به خروجی ها و ورودی هایی اطلاق می شود که فضای داخلی و خارجی ساختمان را به هم متصل می کند. افزایش تعداد خروجی های پنجره در فضای لنگر می تواند به کاربران کمک کند تا در شرایط خاص یک پنجره طبقه پایین یا نردبان آتش نشانی را برای فرار انتخاب کنند.
-
از نظر انتخاب مسیر یک سناریوی آتش سوزی داخلی، ما اجزای آسانسور، پله برقی و پلکان را در گذرگاه عمودی گسترش می دهیم تا مسیر عمودی قابل دسترسی در آتش را تشخیص دهیم. آسانسورها در هنگام آتش سوزی به دلیل قطع برق کار نمی کنند. پله برقی ها عموماً در سالن های نسبتاً باز قرار دارند و به طور عینی می توانند در دوره اولیه آتش سوزی نقش داشته باشند. اما به دلایل ایمنی نمی توان از پله برقی ها به عنوان تاسیسات تخلیه طبق مقررات ملی استفاده کرد. بنابراین پلهها انتخاب نسبتاً مطمئنی در یک گذرگاه عمودی هستند.
-
از نظر ایمنی تخلیه در یک سناریوی آتش سوزی داخلی، اجسام قابل اشتعال و انفجار و اجزای اشیاء غیر قابل اشتعال را به عنوان موانع گسترش می دهیم. در فرآیند کلی ناوبری داخلی، موانع بر برنامه ریزی مسیر تأثیر می گذارد و روند ناوبری را پیچیده می کند. استاندارد IndoorGML موانع را به عنوان فضای غیر ناوبری طبقه بندی می کند و ویژگی های مانع را با جزئیات در نظر نمی گیرد. با این حال، ویژگی های قابل اشتعال و انفجاری موانع باید در نظر گرفته شود تا ایمنی در هنگام تخلیه اضطراری آتش سوزی افزایش یابد.
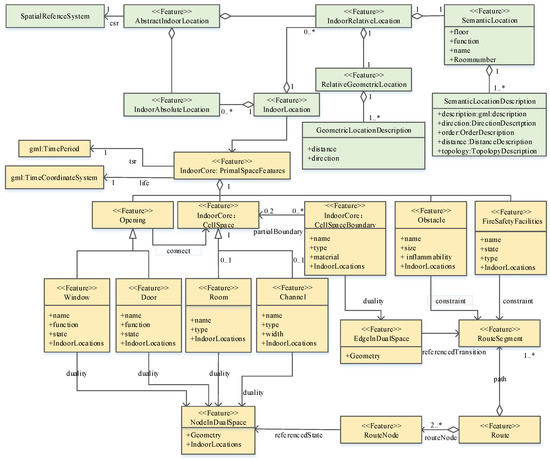
3.5. تعریف مکان بر اساس GML مکان داخلی
-
افتتاح. کلاس Opening از کلاس PrimalSpaceFeatures به ارث رسیده است و شامل کلاس Door و کلاس Window است که شامل چهار ویژگی است: name، function، accessibility و IndoorLocations. نام یک رشته از نوع xs است، یعنی رشته ای متشکل از اعداد و حروف. این عملکرد توسط WindowFunctionType و DoorFunctionType تعریف می شود که شامل درب ها و پنجره های ضد حریق، درب ها و پنجره های لنگر و درب ها و پنجره های معمولی است. حالت دسترسی از طریق یک شناسه Boolean را نشان می دهد، که در آن 0 نشان می دهد که یک در یا پنجره غیر قابل عبور است و 1 نشان می دهد که یک در یا پنجره قابل عبور است. IndoorLocations با توضیحات مکان داخلی تعریف شده توسط IndoorLocationGML [ 27 ] مرتبط است.
-
CellSpace. CellSpace ماژول هسته IndoorGML است که یک کلاس معنایی مربوط به یک شی فضایی در فضای اقلیدسی است [ 19 ]. CellSpace از کلاس PrimalSpaceFeatures که شامل کلاس Room و کلاس Channel است به ارث رسیده است. کلاس Room شامل دو ویژگی است: name و IndoorLocations. کلاس Channel شامل چهار ویژگی است: name، type، width و IndoorLocations.
-
CellSpaceBoundary. CellSpaceBoundary همچنین ماژول هسته IndoorGML است که برای توصیف معنایی مرز یک شی فضایی استفاده می شود [ 19 ]. CellSpaceBoundary نیز از کلاس PrimalSpaceFeatures به ارث رسیده و با CellSpace مرتبط است.
-
مانع. مانع یک کلاس افزونه است که شامل چهار ویژگی است: نام، اندازه، اشتعال پذیری و IndoorLocations.
-
FireSafety Facility. FireSafetyFacility یک کلاس افزونه است که شامل چهار ویژگی است: name، state، type و IndoorLocations. انواع تأسیسات آتش نشانی عبارتند از FireExtinguisher، FumeExtrator و EvacuationIndicatingLamps.
-
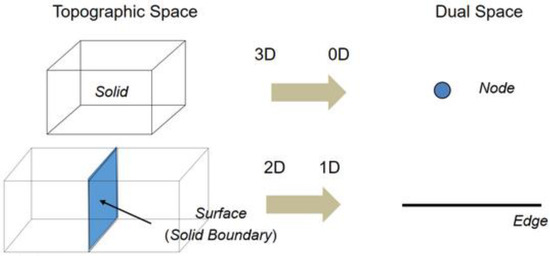
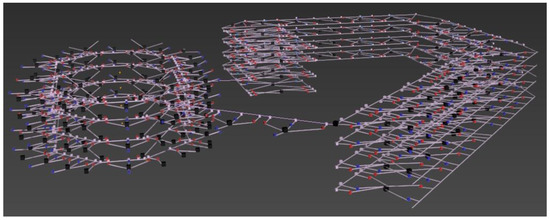
فضای دوگانه. از طریق تبدیل دوگانه، یک جسم k-بعدی در فضای N-بعدی را می توان به یک جسم بعدی (Nk) در فضای دوگانه تبدیل کرد. این بدان معنی است که در فضای دوگانه مربوطه، یک فضای سلولی سه بعدی (مثلاً اتاق) به یک گره صفر بعدی تبدیل می شود. یک سطح مرزی دو بعدی (به عنوان مثال، دیوار و در) بین دو واحد به یک لبه 1 بعدی تبدیل می شود. به این ترتیب، فضای اصلی به یک گراف گره از فضای دوگانه تبدیل می شود تا رابطه توپولوژیکی شبکه جاده های داخلی را بیان کند. شکل 3 مثال تبدیل دوگانه را نشان می دهد.
-
شبکه جاده های سرپوشیده بر اساس مدل اتاق – اتاق، اتاقهای داخلی، پلهها، آسانسورها، پلههای برقی، درها و پنجرهها به عنوان گرهها در فضای دوگانه اجرا میشوند. گرههای اضافی را در نقاط اتصال اجزای کانال، و همچنین اجزای در، پنجره و کانال اضافه میکنیم. مرز فضای سلولی راهرو و کانال عمودی به صورت لبه در فضای دوگانه اجرا می شود. ما نقاط مسیر داخلی و بخش های مسیر را با استفاده از موانع و امکانات آتش نشانی به عنوان محدودیت های معنایی می سازیم. سپس یک مدل شبکه سه بعدی جاده داخلی آتش گرا به دست می آوریم.
4. یک روش مسیریابی برای سناریوهای آتش سوزی داخلی
4.1. بیان معنایی مسیریابی داخلی
4.1.1. دسترسی به مسیر یک سناریوی آتش سوزی
دسترسی به مسیر، نشانگر آسانی حرکت بین گره ها در یک شبکه جاده ای است. به طور کلی، برخی از گره ها به طور عینی غیر قابل دسترس هستند (به عنوان مثال، درها و پنجره های قفل شده). با این حال، در هنگام آتش سوزی، وضعیت دسترسی درها و پنجره ها ممکن است تغییر کند و از پله برقی و آسانسور نمی توان به عنوان مسیر تخلیه استفاده کرد. بنابراین وضعیت دسترسی اجزای داخلی به طور مستقیم بر سرعت تخلیه و انتخاب مسیر تخلیه تأثیر می گذارد و ظرفیت گذرگاه تخلیه را کاهش می دهد. ما موانع را به موانع غیر قابل اشتعال و موانع انفجاری قابل اشتعال تقسیم می کنیم. وجود موانع غیر قابل اشتعال برای تغییر مسیرهای موجود در هنگام تخلیه افراد در نظر گرفته می شود. بنابراین دسترسی به مسیر در یک سناریوی آتش سوزی را می توان به صورت توصیف کرد
جایی که v e t a x _ s t a t e�����_�����حالت گره شبکه راه است و با دو نوع حالت گره شبکه راه قابل دسترسی و غیر قابل دسترس بیان می شود. اگر حالت گره غیرقابل دسترسی باشد، گره نمی تواند در حین تخلیه استفاده شود. جدول 1 وضعیت درها، پنجره ها و پله های دسترسی عمودی، گره های پله برقی آسانسور را در صحنه حریق نشان می دهد. n u m b e r _ u n fل������_����و n u m b e r _ fل������_��تعداد موانع انفجاری غیر قابل اشتعال و قابل اشتعال در مسیر به ترتیب می باشد.
4.1.2. درجه تشخیص مسیر یک سناریوی آتش سوزی
مقدار زیادی دود متراکم تولید شده در اثر احتراق آتش ساختمان، دامنه دید را تا حد زیادی کاهش می دهد و باعث ایجاد مشکلاتی در تخلیه می شود. در این مرحله، نورپردازی نشاندهنده تخلیه یک عنصر کلیدی در مسیریابی ناوبری داخلی است، زیرا میتواند بار شناختی را در طول فرآیند تخلیه کاهش دهد و اطمینان ناوبری را افزایش دهد. چنین نورپردازی همچنین یک اثر آرام بخش دارد و تضمین می کند که تصمیمات مسیریابی صحیح گرفته می شود [ 31]. با این حال، اغلب یک تاخیر جدی در نگهداری و تعمیرات اساسی روشنایی نشان دهنده تخلیه وجود دارد، که باعث می شود خرابی در نشانگرهای تخلیه اضطراری به موقع تشخیص داده نشود. خرابی لامپ های نشانگر تخلیه در گذرگاه ایمن، نقاط کور ایجاد می کند و بر شناسایی مسیر فرار در سناریوی آتش سوزی تأثیر می گذارد. تعداد لامپهای نشاندهنده تخلیه کار اغلب برای توصیف درجه تشخیص مسیر یک سناریوی آتشسوزی استفاده میشود. بیان معنایی آن را می توان اینگونه توصیف کرد
جایی که n u m b e r _ l a m p������_����تعداد لامپ های نشانگر تخلیه موثر در طول مسیر تخلیه است.
4.1.3. پارامترهای آتش سوزی
با افزایش تشعشعات انرژی حرارتی، دمای بالای تولید شده توسط آتشسوزی ساختمانها باعث میشود افراد دچار دمای بدن بالا، سوختگیهای سطحی و سوختگی مجاری تنفسی شوند که ایمنی آنها را تهدید میکند [32 ] . بنابراین دمای آتش یک شاخص مهم برای اندازه گیری درجه خطر است. ما معناشناسی دمای آتش را به عنوان شرح می دهیم
جایی که تی�دما است، t − r a n gه�-�����مجموعه گره هایی است که تحت تأثیر دما قرار می گیرند و تیتی��زمان دمای فعلی آتش است. انسان فقط می تواند دماهای بین 42 تا 50 درجه سانتیگراد را برای مدت بسیار کوتاهی تحمل کند. بدون لباس محافظ، انسان نمی تواند در هوای با دمای بالا در دمای 50 درجه سانتی گراد حرکت کند [ 33 ]. همانطور که در جدول 2 نشان داده شده است ، پارامتر دما را با توجه به سطح خطر به چهار بازه تقسیم می کنیم. t − r a n gه�-�����شرح داده شده است
دید به طور کلی به طولانی ترین فاصله ای که یک فرد می تواند یک شی را ببیند اشاره دارد. دود ناشی از آتش سوزی ساختمان دارای ویژگی های ضد نور بودن است و لامپ نشان دهنده دید عامل مهمی در تخلیه ایمن افراد در محیط دود است. ما معناشناسی دید دود را به عنوان توصیف می کنیم
جایی که V�پارامتر دید است و v − r a n gه�−�����مجموعه گره ای است که تحت تأثیر دید قرار می گیرد. بر اساس تحقیقات آماری در “راهنمای مهندس آتش نشانی” استرالیا، افراد در یک فضای بزرگ باید بتوانند دورتر از افراد در یک فضای کوچک را ببینند تا جهت تخلیه را بیابند و بنابراین به دید بهتری نیاز دارند [34 ] . جدول 3 آستانه های دید خاص را فهرست می کند. برای ساختمانهای عمومی، طول راهرو تخلیه نسبتاً طولانی است و یافتن مسیر و مسیر تخلیه در زمان آتشسوزی برای افراد دشوارتر است. همانطور که در جدول 4 نشان داده شده است، محدوده پارامتر آتش دید را با توجه به تأثیر دید در یافتن مسیر تعریف می کنیم . تیv��نشان دهنده زمان دید فعلی آتش است.
4.2. هزینه ناوبری سه بعدی سناریوهای آتش سوزی داخلی
4.2.1. تابع هزینه دسترسی به مسیر
دسترسی به مسیر در سناریوهای آتش نشانی مهمی از دشواری حرکت بین گره ها در یک شبکه جاده ای است و همچنین یک عامل تصمیم گیری مهم برای انتخاب مسیر در موقعیت های آتش سوزی است. دسترسی به مسیر یک صحنه آتش سوزی توسط سه عامل محدود می شود: وضعیت گره، تعداد موانع غیر قابل اشتعال، و تعداد موانع قابل اشتعال و انفجار. تابع هزینه دسترسی به مسیر به صورت تعریف شده است
جایی که fa c c(vمن، vj)����(��, ��)تابع هزینه دسترسی به مسیر از گره است vمن��به گره vj��. fs t a t e(vمن)������(��)و fs t a t e(vj)������(��)وضعیت دسترسی گره هستند vمن��و گره vj��در یک سناریوی آتش سوزی وضعیت دسترسی را می توان با استفاده از جدول 1 و وضعیت دسترسی گره قضاوت کردvمن��به صورت زیر بیان می شود و به همین ترتیب برای fs t a t e(vj)������(��)از گره vj��.
جایی که fu n fل(vمن، vj)�����(��, ��)مسیر دسترسی بر عملکرد هزینه موانع غیر قابل اشتعال از گره است vمن��به گره vj��در یک سناریوی آتش سوزی و با تعداد موانع غیر قابل اشتعال به عنوان بیان می شود
جایی که ffل(vمن، vj)���(��, ��)مسیر دسترسی بر عملکرد هزینه موانع قابل اشتعال و انفجاری از گره است vمن��به گره vj��در یک سناریوی آتش سوزی با توجه به خطر بسیار بالای موانع قابل اشتعال و انفجار، بخش دارای موانع قابل اشتعال و انفجار را غیر قابل دسترس تعریف می کنیم و عملکرد آن را به صورت زیر بیان می کنیم.
4.2.2. تابع هزینه مدرک شناسایی مسیر
درجه تشخیص مسیر در یک سناریوی آتش سوزی نشان دهنده مشکلی است که افراد در درک، تشخیص و اجرای دستورالعمل های ناوبری مسیر در حین تخلیه دارند و عامل مهمی است که بر ایمنی و کارایی تخلیه تأثیر می گذارد. مقدار زیادی دود غلیظ دید را در فضای داخلی ساختمان کاهش می دهد و تخلیه اضطراری نشان دهنده روشنایی است که تخلیه را هدایت می کند تا حد زیادی بازده تخلیه را بهبود می بخشد. اما در صورت عدم نگهداری و تعمیر ناکافی نشانگرهای تخلیه اضطراری، معمولاً یک پدیده تاخیر وجود دارد که باعث خرابی نشانگر می شود. هنگامی که یک آتش سوزی یا اضطراری دیگر رخ می دهد، این یک مشکل جدی برای تشخیص مسیر ایجاد می کند. در مورد آتش سوزی، تعداد نشانگرهای تخلیه که کار می کنند معمولاً برای توصیف درجه تشخیص مسیر در سناریوهای آتش سوزی استفاده می شود. بیان معنایی آن را می توان با
سناریوی درجه تشخیص مسیر آتش سوزی fr e c(vمن، vj)��هج(�من، ��)با معادله (10)، که در آن n u m b e r _ l a m p�تومتربه�_لآمترپتعداد لامپ های نشان دهنده تخلیه موثر از گره است vمن�منبه گره vj��، و د(vمن، vj)د(�من، ��)فاصله نسبی داخل ساختمان بین vمن�منو vj��، به عنوان فاصله اقلیدسی تعریف می شود. اگر مکان های هندسی مطلق گره ها vمن�منو vj��در یک مدل بیان سه بعدی برای سناریوهای آتش سوزی داخلی هستند (ایکسمن،yمن،zمن)(ایکسمن،�من،�من)و (ایکسj،yj،zj)(ایکس�،��،��)، فاصله مکان نسبی داخلی بین این دو گره به صورت بیان می شود
4.2.3. تابع هزینه پارامترهای آتش سوزی داخلی
هنگامی که یک آتش سوزی داخلی رخ می دهد، بزرگی آن مستقیماً بر انتخاب مسیر و ایمنی شخصی تأثیر می گذارد. بنابراین پارامترهای آتش فاکتورهای مهمی هستند که بزرگی یک آتش سوزی داخلی را مشخص می کنند. دما و دید، که برای تخلیه و سلامت افراد مهم است، به عنوان پارامترهای آتش سوزی داخلی انتخاب می شود. تابع هزینه به صورت تعریف شده است
جایی که د(vمن، vj)د(�من، ��)فاصله بین گره ها است vمن�منو vj��در مدل بیان سه بعدی سناریوهای آتش سوزی داخلی، و α ( T، V)�(تی،�)ضریب مربوط به درجه حرارت و دید آتش است که با توجه به تقسیم محدوده دمای آتش در جدول 2 و دید در جدول 3 به صورت تعریف شده است.
4.2.4. تابع هزینه ناوبری سه بعدی برای سناریوهای آتش سوزی داخلی
با توجه به تابع هزینه دسترسی به مسیر، درجه تشخیص مسیر و پارامترهای آتش سوزی، ما تابع هزینه ناوبری سه بعدی داخلی را برای یک سناریوی آتش سوزی به صورت کمی تعیین می کنیم.
جایی که fa c c(vمن، vj)�آجج(�من، ��)تابع هزینه دسترسی به مسیر در یک سناریوی آتش سوزی از گره است vمن�منبه گره vj��، fr e c(vمن، vj)��هج(�من، ��)تابع هزینه درجه تشخیص مسیر در یک سناریوی آتش سوزی است و ffمن هستم _(vمن، vj)��من�ه(�من، ��)تابع هزینه پارامترهای آتش است. با توجه به معادلات (6)، (10) و (12)، می توانیم معادله (14) را بسط دهیم تا به دست آوریم:
جایی که ωآ�آ، ωr��، و ωf��ضرایب وزنی هستند. وزن ها را می توان با توجه به نیاز کاربر تخصیص داد و روابط زیر برآورده می شوند:
4.3. الگوریتم مسیریابی سه بعدی برای سناریوهای آتش سوزی داخلی
4.3.1. الف* الگوریتم
4.3.2. الگوریتم مسیریابی داخلی محدود چند معنایی
بر اساس الگوریتم A*، تابع هزینه الگوریتم مسیریابی داخلی با محدودیت های معنایی متعدد به صورت تنظیم شده است.
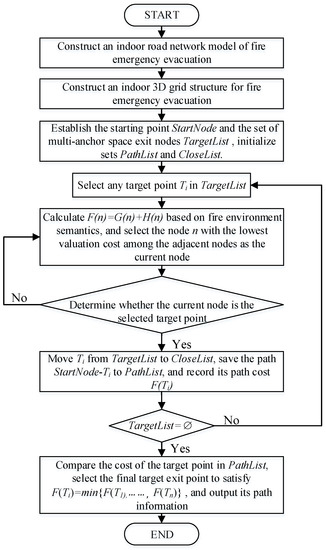
جایی که G ( n )جی(�)تابع هزینه را از گره شروع به گره نشان می دهد n�، و G ( n )جی(�)با رابطه (14) محاسبه می شود. تابع ارزیابی اچ( n )اچ(�)نشان دهنده فاصله اقلیدسی از گره است n�به گره هدف الگوریتم یافتن مسیر تخلیه داخلی پیشنهادی که توسط جریان چند معنایی محدود شده است در شکل 4 نشان داده شده است .
-
یک ساختار شبکه ای سه بعدی از گذرگاه های عمودی بسازید و هر طبقه را با یک گذرگاه عمودی به هم متصل کنید تا یک ساختار شبکه ای سه بعدی داخلی برای سناریوهای آتش سوزی داخلی تشکیل شود. آسانسور و پله برقی در طول فرآیند تخلیه اضطراری غیرقابل دسترسی هستند. بنابراین، مردم باید پله ها را به عنوان مسیر تخلیه انتخاب کنند.
-
یک نقطه شروع و مجموعه ای از گره های خروجی فضای چند لنگر ایجاد کنید. مکان نقطه شروع جستجوی مسیر را برای سناریوی آتش سوزی تعیین کنید. نزدیکترین گره را در مدل شبکه جاده های داخلی به عنوان نقطه شروع انتخاب کنید اسt a r t No dهاستیآ�تین�ده. درها و پنجره ها به عنوان گره های خروجی فضای لنگر برای برآوردن الزامات تخلیه اضطراری استفاده می شوند. با توجه به خطر فرار از خروجی پنجره فضای لنگر در طبقه دوم و بالاتر، تنها خروجی های در و پنجره طبقه اول در فضای لنگر به مجموعه نقطه خروجی فضای چند لنگر اضافه می شود. T a r g e t L i s t = {تی1،تی2, …… , _تیn، }TargetList={تی1،تی2،……،تی�،}. مجموعه ها سیl o s e L i s tسیل�سه�منستیو پa t h L i s tپآتیساعت�منستیبرای ذخیره نقطه هدف پیموده شده و مسیر ناوبری از نقطه شروع تا نقطه هدف، مقداردهی اولیه می شوند.
-
محاسبه تابع ارزیابی اف( n ) = G ( n ) + H( n )اف(�)=جی(�)+اچ(�)و گرهی را با کمترین هزینه ارزش گذاری بین گره های مجاور به عنوان گره فعلی انتخاب کنید. عملکرد هزینه ناوبری سه بعدی داخلی را برای سناریوهای آتش سوزی تعیین کنید G ( n )جی(�)حسابداری برای معناشناسی مسیریابی داخلی پیشنهاد شده در این مقاله. نقطه هدف را انتخاب کنید تیمنتیمنکه در T a r g e t L i s tTargetListو فاصله اقلیدسی را از تمام گره های مجاور در نقطه شروع فعلی تا نقطه هدف محاسبه کنید تیمنتیمنبه عنوان تابع اکتشافی اچ( n )اچ(�). محاسبه تابع ارزیابی اف( n ) = G ( n ) + H( n )اف(�)=جی(�)+اچ(�)و مسیر نقطه مجاور با کمترین مقدار تابع ارزیابی را به عنوان گره فعلی انتخاب کنید.
-
تعیین کنید که آیا گره فعلی نقطه هدف است یا خیر تیمنتیمندر مرحله (3) انتخاب شده است. اگر بله، حرکت کنید تیمنتیمناز مجموعه خروجی فضای چند لنگر T a r g e t L i s tTargetListبه مجموعه خروجی فضای لنگر پیموده شده سیl o s e L i s tسیل�سه�منستی، مسیر پیاده روی را از نقطه شروع آن به نقطه فعلی مجموعه اضافه کنید پa t h L i s tپآتیساعت�منستی، و در هزینه ناوبری آن صرفه جویی کنید. در غیر این صورت به مرحله (3) برگردید و مقدار تابع ارزش گذاری گره مجاور گره فعلی را محاسبه و مقایسه کنید.
-
خالی بودن مجموعه را مشخص کنید. اگر مجموعه خالی نیست، یک گره جدید در مجموعه به عنوان نقطه هدف وارد کنید و به مرحله (3) بازگردید. اگر مجموعه خالی باشد، به این معنی است که تمام نقاط هدف در مجموعه خروجی فضای چند لنگر طی شده است. هزینه های ناوبری این مسیرهای امکان پذیر را برای تعیین مسیر بهینه مقایسه کنید. این راضی است اف(تیمن) = m i n { F(تی1) ، …… ، F _(تیn) }اف(تیمن)=دقیقه{اف(تی1)،……،اف(تی�)}. خروجی اطلاعات مسیر انتخاب شده.
-
پایان الگوریتم
5. آزمایش ها و بحث ها
5.1. ساخت یک مدل بیان سه بعدی داخلی برای یک سناریوی آتش سوزی
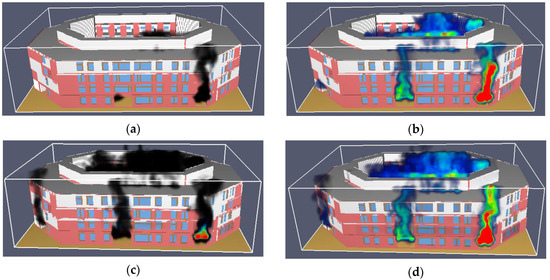
5.2. شبیه سازی آتش
5.3. نتایج
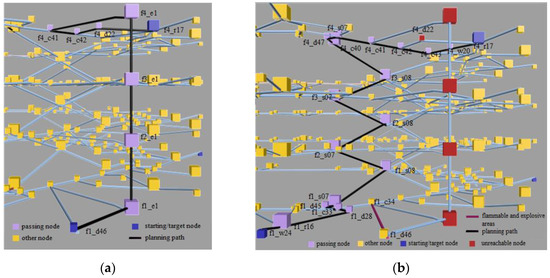
5.3.1. تأثیر دسترسی به مسیر در مسیریابی داخلی
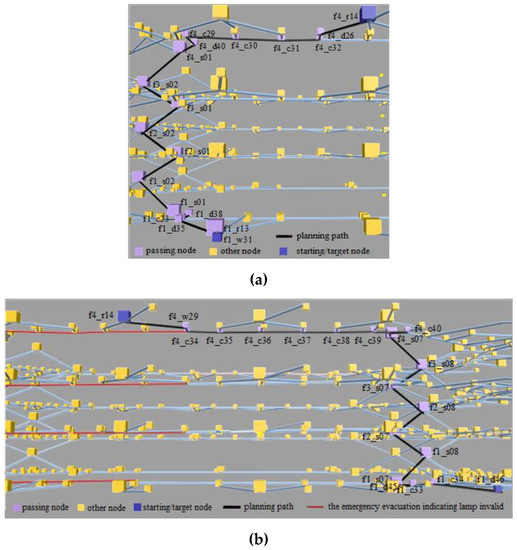
5.3.2. تأثیر درجه تشخیص مسیر در مسیریابی داخلی
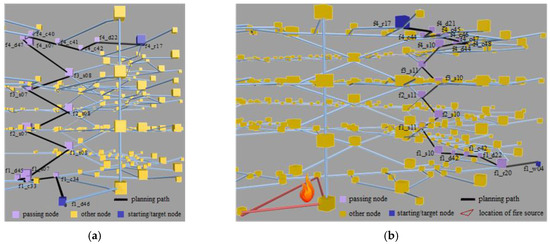
5.3.3. تاثیر پارامترهای آتش در برنامه ریزی مسیر داخلی
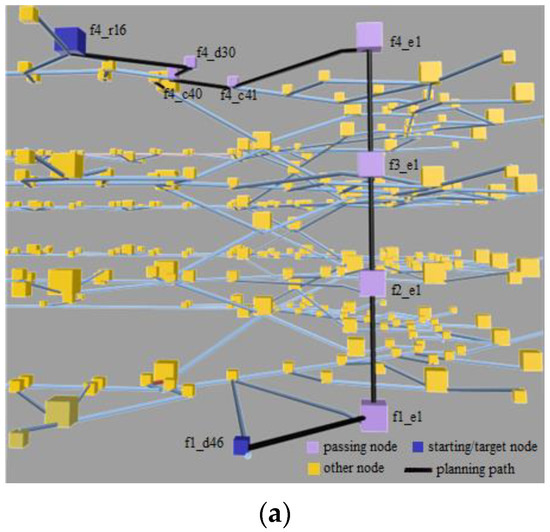
5.3.4. مسیریابی داخلی توسط پارامترهای چند معنایی محدود شده است
6. نتیجه گیری
منابع
- ژانگ، ال. وانگ، جی ایکس؛ یوان، تی. پنگ، KM تحقیق بر روی نقشه داخلی. جغرافیایی تف کردن Inf. علمی 2013 ، 43-47. [ Google Scholar ] [ CrossRef ]
- تجزیه و تحلیل فو، ZM بر روی داده های آتش سوزی در چین برای دوره بین 2003-2012. J. Saf. محیط زیست 2014 ، 14 ، 341-345. [ Google Scholar ] [ CrossRef ]
- بکر، تی. ناگل، سی. Kolbe, Th یک مدل فضایی چندلایه برای ناوبری در فضاهای داخلی. در علوم ژئو اطلاعات سه بعدی ; Springer Berlin Heidelberg: برلین، آلمان، 2009; صص 61-77. [ Google Scholar ]
- لین، YH; لیو، YS; گائو، جی. هان، XG; لای، سی. Gu, M. برنامه ریزی مسیر مبتنی بر IFC برای فضاهای داخلی سه بعدی. Adv. مهندس Inf. 2013 ، 27 ، 189-205. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیو، ال. زلاتانوا، اس. یک مدل داده معنایی برای ناوبری داخلی. در مجموعه مقالات چهارمین کارگاه بین المللی ACM SIGSPATIAL در مورد آگاهی فضایی داخلی، ساحل ردوندو، کالیفرنیا، ایالات متحده آمریکا، 6 نوامبر 2012. صص 1-8. [ Google Scholar ]
- تستسوس، وی. آناگنوستوپولوس، سی. کیکیراس، پ. Hadjiefthymiades، S. ناوبری غنی شده معنایی برای محیط های داخلی. بین المللی J. Web Grid Serv. 2006 ، 2 ، 453-478. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Xu، YC; Wen، ZG; Zhang، XY برنامه ریزی مسیر بهینه داخلی بر اساس الگوریتم Dijkstra. در مجموعه مقالات کنفرانس بین المللی 2015 در زمینه مهندسی مواد و کاربردهای فناوری اطلاعات (MEITA 2015)، گویلین، چین، 30 تا 31 اوت 2015. صص 309-313. [ Google Scholar ]
- لین، دی. آهنگ، جنرال موتورز; شما، X. جیا، فلوریدا؛ دنگ، سی. مطالعه بر روی برنامه ریزی مسیر داخلی با آگاهی از زمینه. جغرافیایی تف کردن Inf. علمی 2016 ، 32 ، 8-13. [ Google Scholar ] [ CrossRef ]
- لیاردت، اف. Szeto، DW; Aitenbichler، E. ناوبری داخلی با آگاهی از زمینه. در مجموعه مقالات یادداشت های سخنرانی در علوم کامپیوتر، هوش محیطی: کنفرانس اروپایی، نورنبرگ، آلمان، 19-22 نوامبر 2008. صص 290-307. [ Google Scholar ]
- لی، جی. Kwan، MP تجزیه و تحلیل مسیریابی فضایی-زمانی برای پاسخ اضطراری در فضای داخلی. J. کره ای Soc. Surv. Geod. فتوگرام کارتوگر. 2014 ، 32 ، 637-650. [ Google Scholar ] [ CrossRef ]
- لو، CS; Weng، GF; یانگ، آر. شن، اس اف. یوان، مدل تخلیه آتش HY بر اساس طرح واره موتور و خودکار سلولی. J. Tsinghua Univ. 2007 ، 47 ، 2163-2167. [ Google Scholar ] [ CrossRef ]
- نیو، ال. آهنگ، YQ مدل شبیهسازی ترکیب فضا و عامل برای تجزیه و تحلیل تخلیه پویا آتش در داخل ساختمان. شبیه سازی 2016 ، 92 ، 215-232. [ Google Scholar ] [ CrossRef ]
- آتیلا، یو. اورتاکچی، ی. اوزاکار، ک. دمیرال، ای. Karas، IR SmartEscape: یک سیستم تخلیه آتش فردی هوشمند سیار بر اساس مدل فضایی سه بعدی. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 223. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ژانگ، جی اف. Wang, SP کاربرد فناوری واقعیت مجازی برای تخلیه اضطراری در ساختمان های بلند. Appl. مکانیک. ماتر 2012 ، 204-208 ، 4941-4945. [ Google Scholar ] [ CrossRef ]
- روپل، یو. ابوالقاسم زاده، پ. شبکههای گراف داخلی همهجانبه مبتنی بر BIM کای، خانم برای موقعیتهای اضطراری در ساختمانها. در مجموعه مقالات محاسبات در مهندسی عمران و ساختمان، ناتینگهام، بریتانیا، 30 ژوئن تا 2 ژوئیه 2010. [ Google Scholar ]
- روپل، یو. Kai، سیستم ناوبری اضطراری داخلی مبتنی بر MS BIM برای ساختمانهای پیچیده. Tsinghua Sci. تکنولوژی 2008 ، 13 ، 362-367. [ Google Scholar ] [ CrossRef ]
- وانگ، بی. لی، اچ جی; Rezgui، YC; بردلی، ا. محیط مجازی مبتنی بر HN BIM برای تخلیه اضطراری آتش سوزی. علمی World J. 2014 , 589016. [ Google Scholar ] [ CrossRef ]
- لی، ن. Burcin، BG; باسکار، ک. Lucio، S. یک الگوریتم محلی سازی داخلی با محوریت BIM برای پشتیبانی از عملیات واکنش اضطراری آتش سوزی ساختمان. خودکار ساخت و ساز 2014 ، 42 ، 78-79. [ Google Scholar ] [ CrossRef ]
- لی، جی. لی، کی جی. زلاتانوا، اس. کلبه، تی. ناگل، سی. بکر، T. OGC® IndoorGML|OGC. در دسترس آنلاین: https://www.opengeospatial.org/standards/indoorgml#downloads (در 3 نوامبر 2019 قابل دسترسی است).
- Xiong، Q. زو، س. Du، ZQ; زو، XY; ژانگ، YT; نیو، ال. لی، ی. Zhou، Y. یک مدل میدان داخلی پویا برای شبیهسازی تخلیه اضطراری. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 104. [ Google Scholar ] [ CrossRef ]
- زو، س. لی، ی. Xiong، Q. زلاتانوا، اس. دینگ، ییل. ژانگ، YT; Zhou، Y. مکان چند بعدی داخلی GML و کاربرد آن برای خدمات مکان یابی داخلی در همه جا. ISPRS Int. J. Geo-Inf. 2016 ، 5 ، 220. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیو، ال. زلاتانوا، اس. زو، س. Li, K. به سوی ادغام IndoorGML و IndoorLocationGML برای برنامه های داخلی. در مجموعه مقالات ISPRS Geospatial Week 2017، ووهان، چین، 18 تا 22 سپتامبر 2017. صص 343-348. [ Google Scholar ]
- آلاتاس، ا. Oosterom، PV; زلاتانوا، اس. هونولد، دی. Verbree, E. استفاده از مدل ترکیبی LADM-IndoorGML برای پشتیبانی از تخلیه ساختمان. در مجموعه مقالات سمپوزیوم میان مدت ISPRS TC IV “علم اطلاعات فضایی سه بعدی – موتور تغییر”، دلفت، هلند، 1 تا 5 اکتبر 2018؛ صص 11-23. [ Google Scholar ]
- آلاتاس، اس. زلاتانوا، اس. Oosterom، PV; Chatzinikolaou، E. لمن، سی. Li، KJ پشتیبانی از ناوبری داخلی با استفاده از حقوق دسترسی به فضاها بر اساس استفاده ترکیبی از مدل های IndoorGML و LADM. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 384. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیو، ال. زلاتانوا، اس. لی، بی اف. Oosterom، PV; لیو، اچ. بارتون، جی. مسیریابی داخلی در شبکه منطقی با استفاده از معناشناسی فضا. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 126. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وانلانده، آر. نیکول، سی. کروز، سی. IFC و مدیریت چرخه عمر ساختمان. خودکار ساخت و ساز 2008 ، 18 ، 70-78. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زو، س. جیانگ، جی. لانگ، ی. ژو، ی. Xiong، Q. لی، بی. ژانگ، اچ پی؛ چا، ژ. زو، XY; فو، ایکس. و همکاران اطلاعات موقعیت مکانی چند بعدی داخلی GML: GB/T 35627-2017. در دسترس آنلاین: https://c.gb688.cn/bzgk/gb/showGb?type=online&hcno=67E12407FDCC0CFDDAA16721088802A4 (در 5 نوامبر 2019 قابل دسترسی است).
- Lou, SL بحث در مورد ویژگی های آتش سوزی بلندمرتبه و اقدامات پیشگیری. ساختمان سیچوان علمی 2009 ، 35.2 ، 122-126. [ Google Scholar ] [ CrossRef ]
- Clemens, P. Geography Markup Language (GML) Encoding Standard, OGC. 2016. در دسترس آنلاین: https://www.ogc.org/standards/gml (در 5 نوامبر 2019 قابل دسترسی است).
- کانگ، هنگ کنگ؛ Li، KJ یک مدل استاندارد داده فضایی داخلی – OGC IndoorGML و رویکردهای پیاده سازی. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 116. [ Google Scholar ] [ CrossRef ]
- می، آ. تریسی، آر. بایر، اس. Tarkiainen، M. کمک های ناوبری عابر پیاده: الزامات اطلاعات و مفاهیم طراحی. پارس محاسبات همه جا حاضر. 2003 ، 7 ، 331-338. [ Google Scholar ] [ CrossRef ]
- دینگ، ییل. او، XB; زو، س. لین، جی. Hu, MY یک روش بهینهسازی پویا در مسیر تخلیه آتشسوزی داخلی بر اساس آگاهی از موقعیت در زمان واقعی. Acta Geod. کارتوگر. گناه 2013 ، 45 ، 1464-1475. [ Google Scholar ] [ CrossRef ]
- Zou، ZC مقیاس بزرگ تخلیه آتش سوزی ساختمان های عمومی اندازه گیری خطرات محیطی و بهینه سازی مسیرهای ناوبری. Ph.D. پایان نامه، موسسه فناوری هاربین، هاربین، چین، 2009. [ Google Scholar ]
- نیو، ال. لی، XX تأثیر فضایی گسترش آتش در برنامه ریزی مسیر خروجی داخلی. علم آتش نشانی تکنولوژی 2016 ، 4 ، 492-496. [ Google Scholar ] [ CrossRef ]
- کریستینا، جی. الکساندر، اس. آرنه، م. کریستین، ام. تشخیص ترک میکرو با الگوریتم کوتاه ترین مسیر Dijkstra. ماخ Vision Appl. 2011 ، 23 ، 589-601. [ Google Scholar ] [ CrossRef ]
- لی، آر. استفاده از استراتژی جهت محدود و فناوری هیپ باینری برای بهینه سازی الگوریتم dijkstra در WebGIS. مهندس کلید ماتر 2010 ، 419-420 ، 557-560. [ Google Scholar ] [ CrossRef ]
- کیان، اچ اس. جنرال الکتریک، WF؛ ژونگ، ام. Ge, M. استفاده از الگوریتم بهبود یافته A* بر اساس سلسله مراتب برای برنامه ریزی مسیر. محاسبه کنید. مهندس Appl. 2014 ، 7 ، 225-229. [ Google Scholar ]
- ژان، WW; وانگ، دبلیو. چن، NC; وانگ، سی. استراتژی های برنامه ریزی مسیر برای پهپاد بر اساس الگوریتم بهبود یافته A. Geomat. Inf. علمی دانشگاه ووهان 2015 ، 3 ، 315-320. [ Google Scholar ] [ CrossRef ]
- جوکنا، س. Schnitger, G. در مورد بهینه بودن الگوریتم کوتاهترین مسیر بلمن-فورد-مور. نظریه. محاسبه کنید. علمی 2016 ، 628 ، 101-109. [ Google Scholar ] [ CrossRef ]
- وی، دی سی اجرای تابع انتخاب مسیر بر اساس الگوریتم فلوید بهبود یافته. در مجموعه مقالات کنفرانس بین المللی WASE 2010 در مهندسی اطلاعات، Beidaihe، چین، 14-15 اوت 2010. صص 223-227. [ Google Scholar ]
- زو، XF؛ Shen, WJ الگوریتم بهبود یافته در مورد مشکل کوتاه ترین مسیر بر اساس الگوریتم فلوید. محاسبه کنید. علمی 2017 ، 44 ، 232-234. [ Google Scholar ]
- Duan، FD یک الگوریتم سریعتر برای کوتاهترین ptath-SPFA. J. جنوب غربی Jiaotong دانشگاه. 1994 ، 2 ، 207-213. [ Google Scholar ]
- Xia، ZD; Bu، TM; Zhang، JY تجزیه و تحلیل و بهبود الگوریتم SPFA. محاسبه کنید. علمی 2014 ، 41 ، 180-184. [ Google Scholar ] [ CrossRef ]
- هارت، پی. نیلسون، ن. رافائل، ب. تصحیح “مبنای رسمی برای تعیین اکتشافی مسیرهای حداقل هزینه”. ACM SIGART Bull. 1972 ، 37 ، 28-29. [ Google Scholar ] [ CrossRef ]
- چابینی، آی. Lan, S. انطباقهای الگوریتم A* برای محاسبه سریعترین مسیرها در شبکههای دینامیکی زمان گسسته قطعی. IEEE Trans. هوشمند ترانسپ سیستم 2002 ، 3 ، 60-74. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]


بدون دیدگاه