


مقایسه ابرهای نقطه ای مشتق از t-LiDAR و UAV-SfM با دقت بالا برای تشخیص تغییرات ژئومورفولوژیکی
چکیده
تجزیه و تحلیل دو حوضه آبریز نیمه کوهستانی کوچک در جزیره مرکزی اویا، یونان، مزایای روشهای تشخیص تغییر مبتنی بر وسیله نقلیه هوایی بدون سرنشین (UAV) و اسکن لیزری زمینی (TLS) را برجسته میکند. ما از ابرهای نقطه ای به دست آمده توسط هر دو روش در دو سایت (S1 و S2) برای تجزیه و تحلیل اثرات آتش سوزی اخیر بر فرسایش خاک استفاده می کنیم. نتایج نشان میدهد که حرکات خاک سطحی در حدود چند سانتیمتر، که در عرض چند ماه اتفاق میافتد، قابل تخمین است. فرسایش در S2 دقیقاً با هر دو روش مشخص میشود و در عرض چهار ماه میانگین 1.5 سانتیمتر به دست میآید. در S1، مقایسه ابرهای نقطهای مشتق از پهپاد، فرسایش سالانه خاک را با دقت بیشتری تعیین میکند و حداکثر نرخ فرسایش سالانه 48 سانتیمتر را نشان میدهد. به نظر می رسد ابرهای نقطه ای مشتق از پهپاد برای نمایش و اندازه گیری فرسایش کانال دقیق تر هستند. در حالی که شستشوی شیب با استفاده از TLS دقیقاً تخمین زده می شود. تجزیه و تحلیل سریهای زمانی Point Cloud یک فرآیند قابل اعتماد و سریع برای ارزیابی فرسایش خاک، بهویژه در محیطهای با تغییرات سریع با دسترسی دشوار برای روشهای اندازهگیری مستقیم است. این مطالعه با تعریف روششناسی مناسب برای ارزیابی فرسایش خاک پس از آتشسوزی در محیطهای مدیترانه، به مدیریت صحیح منابع زمین کمک میکند.
کلمات کلیدی: اسکن لیزری زمینی (TLS) ; ساختار از حرکت (SfM) ; پهپاد ; ابر نقطه ; فرسایش خاک ؛ آتش سوزی جنگلی ؛ ژئومحیط ; سنجش از دور
1. مقدمه
تغییرات کاربری اراضی و رویدادهای آتشسوزی جنگلی در دهههای گذشته برای بسیاری از کشورها مسائل زیستمحیطی مهم بوده است. آتش سوزی های جنگلی به دلیل فراوانی فزاینده و فرسایش خاک ناشی از آن، تخریب قابل توجهی خاک را در منطقه مدیترانه ایجاد می کنند [ 1 ، 2 ، 3 ، 4 ، 5 ]. فرسایش خاک از نظر تخریب خاک می تواند محیط زیست را تحت تاثیر قرار دهد اگر اقدامات حفاظتی اعمال نشود. در طول فرآیند فرسایش خاک، جداسازی دانه به دانه از خاک سطحی رخ می دهد، و به دنبال آن حمل و نقل و رسوب در مناطق پایین شیب [ 2 ، 3 ] رخ می دهد., 6 , 7 ]. فرسایش آبی، به دلیل ژئومورفولوژی کوهستانی و شرایط اقلیمی که با رویدادهای بارشی با شدت بالا مشخص می شود، فرآیند فرسایش اولیه در حوضه های مدیترانه است [ 3 ].
ابزارهای جدیدی مانند تکنیکهای تشخیص و محدوده نور زمینی (tLiDAR) در 15 سال گذشته [ 4 ، 8 ، 9 ، 10 ، 11 ، 12 ]، همراه با تکنیکهای فتوگرامتری مبتنی بر وسایل نقلیه هوایی بدون سرنشین (UAV) که به سرعت توسعه یافتهاند. سال [ 13 ، 14]، به طور گسترده در برجسته کردن تشخیص تغییر یا حتی ساختار تاج پوشش جنگل با تولید مدلهای دیجیتالی زمین با دقت بالا استفاده میشوند. روش ساختار از حرکت (SfM) یک تکنیک گسترده است که می تواند برای این منظور مورد استفاده قرار گیرد. پلتفرمهای پهپاد با دوربین میتوانند برای بررسیهای فتوگرامتری در مقیاس بزرگ در مکانهای غیرقابل دسترس مورد استفاده قرار گیرند، در حالی که روش اسکن لیزری زمینی (TLS) یک تکنیک تقریباً 15 ساله است که به خوبی تثبیت شده است، و مدلهایی با دقت بالا در این زمینه تولید میکند. میلی متر/سانتی متر
روش SfM یک روش بازسازی سطح غیرفعال است، در حالی که سنسور TLS یک روش فعال است که منجر به بازسازی سطح تیز می شود و حاوی مقادیر سیگنال شدت پراکنده پسین هدف است. این اطلاعات در برخی از کاربردهای علمی که از اندازهگیریهای زبری استفاده میکنند (به عنوان مثال، نرخ لغزش خطا، تجزیه و تحلیل دیوارهای ترانشه) حیاتی است، همانطور که با [ 15 ، 16 ، 17 ، 18 ] نیز مشخص میشود، یا حتی خواص مواد مختلف که میتوانند هر ماده را بر اساس تشخیص دهند. انعکاس پرتو لیزری که بر سطح آن تحت یک زاویه تابش خاص تأثیر می گذارد [ 19 ].
فناوری LiDAR بیشتر برای جمع آوری داده های ارتفاعی با دقت و چگالی بالا با استفاده از تکنیک اسکن پرتو لیزر استفاده می شود. این روش منجر به داده هایی با وضوح بالا می شود که بازسازی سطح عالی را تحت هر شرایط نوری ارائه می دهد. سنسور LiDAR از همان اصول روش راداری رایج استفاده می کند. یک پالس لیزری با ویژگی های مشخص شده را در برابر یک هدف تعریف شده ارسال و دریافت می کند و زمان بازگشت پرتو به منبع را محاسبه می کند. با توجه به طول موج کم طیفی (انرژی) قابل توجهی که توسط TLS استفاده می شود، اندازه گیری اشیاء/هدف های کوچک امکان پذیر است. پرتو توسط یک منبع دوار که با یک محدوده زاویه مشخص مشخص شده است ساطع می شود. فرآیند اسکن با فرکانس پالس مشخصی مشخص می شود که منجر به محاسبه فاصله با دقت بالا توسط پرتو ساطع می شود. 15 , 16 , 17 , 18 , 20 , 21 , 22 , 23 , 24 , 25 , 26 ].
اسکن لیزری هوابرد (ALS) و TLS از اوایل دهه 2000 تأثیر زیادی بر جمع آوری داده های DSM (مدل سطح دیجیتال) گذاشته است [ 27 ، 28 ، 29 ]. بسیاری از محققان موافق هستند که فناوری LiDAR موثرترین رویکرد برای جمع آوری داده ها و بازسازی سطح سه بعدی با دقت بالا است. علاوه بر این، حسگرهای LiDAR از مزیت تخصیص فوری مختصات سه بعدی در هر نقطه از ناحیه هدف در یک سیستم مختصات محلی یا جهانی برخوردار هستند [ 30 ، 31 ، 32]. تکنیک TLS یک رویکرد ایستا در مقایسه با شکل پویا ALS است. علاوه بر این، TLS یک چشم انداز افقی در مقایسه با جهت نادر ALS دارد. از این رو، روش TLS می تواند به دقت بالاتری دست یابد، در حالی که ALS زمان کمتری را صرف می کند و در نتیجه رویکرد مقرون به صرفه تری دارد [ 33 ، 34 ، 35 ، 36 ]. به طور خاص، اگر مجموعه دادههای همپوشانی میتوانند معایب هر روش جداگانه را به حداقل برسانند، ترکیب احتمالی ALS و TLS به طور بالقوه میتواند دقت اندازهگیری را افزایش دهد.
به دنبال تکنیک نوآوری LiDAR، فتوگرامتری SfM از طریق تصاویر پهپاد ابزاری ارزشمند در جمع آوری داده های توپوگرافی به ویژه در کاربردهای ژئومورفولوژیکی ثابت شد [ 37 ، 38 ]. چندین محقق اهمیت روشهای SfM را برای تولید مدلهای زمین دیجیتال با کیفیت بالا (DTM)، ابرهای نقطهای و بازسازی سطح از طریق تصاویر پهپاد نشان دادهاند [ 39 ، 40 ]. تعداد زیادی از مطالعات با الگوریتمهای ساختار از حرکت (SfM) و مقایسه DTM و توانایی آنها برای استفاده مؤثر کنار میآیند: تحقیقات پس از سیل [ 41 ، 42 ، 43 ، تشخیص تغییر [ 44 ، 45 ، 46 ، 47 ]، یا حتی شناسایی دانه [ 48 ، 49 ]. مقایسه بین ابرهای نقطه LiDAR مشتق از SfM و هوابرد نیز توسط Mlambo و همکاران انجام شد. [ 50 ]، که منجر به همبستگی قوی بین SfM و DEM مشتق شده از LiDAR (مقایسه پیکسل به پیکسل) می شود. سانکی و همکاران [ 51 ] استفاده ترکیبی از دوربینهای دیجیتال و LiDAR را نشان میدهد و به این نتیجه میرسد که هر دوی آنها ابزاری عالی در تحقیقات ژئومورفولوژیکی با نتایج دقت بالا هستند. اخیراً، متئوس و همکاران. [ 52 ] ترکیبی از روشهای فتوگرامتری مبتنی بر InSAR و پهپاد را برای نظارت بر زمین لغزش در نزدیکی منطقه شهری استراحتگاه کارمنس دل مار توصیف کرد.
تکنیک SfM از ویژگی ها/هدف های مشترک در تصاویر متوالی گرفته شده از موقعیت های مختلف استفاده می کند. پهپاد را می توان در مکان هایی که به راحتی در دسترس نیستند، مانند شیب های دور، شیب دار و ناپایدار استفاده کرد. بررسی های هوایی پی در پی، DTM های متعددی را ارائه می دهند که با هم مقایسه می شوند و تغییرات خاک سطحی قابل اندازه گیری را به دست می دهند. به همین دلیل، معمولاً از نرمافزارهایی استفاده میشود که از یک گردش کار استریوپسی چند نما، با استفاده از شناسایی ویژگی تصویر و تطبیق ویژگی پیروی میکنند [ 53 ].
مطالعه یک منطقه با استفاده از تصاویر پهپاد به دلیل عوامل متعددی مانند پوشش گیاهی متراکم، سطوح بدون بافت، تنوع شیب ها، مناطق پر از آب و غیره می تواند واقعا پیچیده باشد. روش پوشش گیاهی است. به خوبی ثابت شده است که DTM مشتق شده از پهپاد نمی تواند مناطق پوشش گیاهی را مانند LiDAR بازسازی کند. Dandois و Ellis [ 54 ] حمایت کردند که DTM تولید شده توسط تکنیک های SfM در مقایسه با ابرهای نقطه مشتق شده از LiDAR به دلیل ساختار تاج پیچیده (نقاط زمینی با کیفیت پایین به دلیل تاج پوشش) با عدم دقت قابل توجهی مشخص می شود.
این مطالعه کاربرد ترکیبی این دو روش را در سایتهای آزمایشی یکسان ارائه میکند، با هدف معرفی جامعه علمی با مقایسه ابر نقطهای چندمنبعی (TLS و UAV مشتق شده) در منظر چند زمانی، بهویژه در شرایط تغییر سریع از نظر فرسایش. و رشد پوشش گیاهی پس از آتش سوزی. ما استدلال می کنیم که هر دو فتوگرامتری TLS و UAV اطلاعات ارزشمندی در مورد فرسایش پس از آتش سوزی ارائه می دهند. ابتدا هر روش را به طور جداگانه تجزیه و تحلیل می کنیم و به تفاوت های آنها اشاره می کنیم. سپس نرخهای فرسایش مربوط به هر روش را نشان میدهیم، استفاده از آنها را ارزیابی میکنیم و بهترین کاربرد را مورد بحث قرار میدهیم.
2. منطقه مطالعه
دو شیب اخیراً سوخته به عنوان محل آزمایش S1 و S2 انتخاب شدند که در جزیره Evia (یونان)، نزدیک شهر Psachna قرار دارند ( شکل 1 a). هر دو مکان با شرایط اقلیمی و ژئومورفولوژیکی مدیترانهای یکسان مشخص میشوند ( شکل 1 ب)، و برای تشخیص تغییرات در یک مقیاس زمانی کوتاه، جایی که انتظار میرود حرکت خاک رخ دهد، مناسب هستند. مناطق مورد مطالعه دارای شیب نسبتاً تند هستند (مقدار متوسط: 30 درجه، شکل 1 ب). آنها به دلیل آتش سوزی های اخیر فاقد پوشش گیاهی هستند و سنگ شناسی آنها مستعد فرسایش است ( شکل 1 a). مساحت S1 حدود 420 متر مربع استو S2 مساحت 85 متر مربع را پوشش می دهد . قبل از آتشسوزی، هر دو مکان توسط جنگلهای مخروطی همراه با انتقالی از جنگلها و درختچهها پوشیده میشدند (کدهای 312 و 324، طبق مجموعه دادههای CORINE 2018). میانگین ارتفاع حدود 80 متر برای S1 و 475 متر برای S2 از سطح دریا است. با توجه به زمینشناسی سایت، منطقه مورد مطالعه وسیعتر به عنوان بخشی از واحد زیرپلاگونی در نظر گرفته میشود [ 55 ، 56]. ساختار زمین شناسی عمدتاً شامل تشکیلات افیولیتی ضخیم است که با سنگ آهک کرتاسه بالایی پوشانده شده اند. در زیر افیولیت ها، ترکیبی از شیست، چرت و شیل با عدسی های متعدد سنگ آهک رخ می دهد. S1 در مجموعه افیولیتی ژوراسیک فوقانی-کرتاسه زیرین، متشکل از سرپانتین ها، دیابازها و پریدوتیت ها، که توسط یک گوشته هوازده با ضخامت قابل توجه پوشیده شده است، قرار دارد. شیب S2 در یک زیرحوضه کوچک، متشکل از مخروط های تالوس و رسوبات آبرفتی با ضخامت زیاد قرار دارد. زمین شناسی سنگ بستر در هر دو سایت مورد مطالعه از تشکیل ضخامت خاک قابل توجهی پشتیبانی می کند که توسط ویژگی های پوشش زمین / پوشش گیاهی تایید شده است ( شکل 1 ).
3. روش شناسی
3.1. پیش کار میدانی
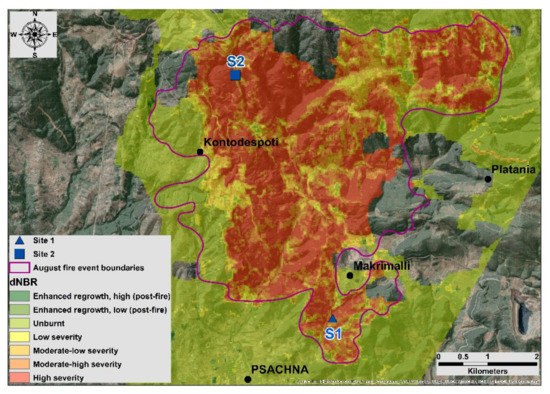
تحقیقات اولیه شامل اولین مطالعه ژئومورفولوژیکی منطقه سوخته برای انتخاب یک منطقه مناسب مورد علاقه (ROI) بود. منطقه مرکزی اویا در طی آتشسوزیهای اخیر (آگوست 2019) ویران شد، بنابراین ما فرض کردیم که حوضههای فرعی در منطقه سوخته با در نظر گرفتن عدم وجود پوشش گیاهی، فرصتی عالی برای ارزیابی از دست دادن خاک ارائه میدهند. هر دو مکان پس از اعمال شاخص نسبت سوختگی نرمال شده تفاوت (dNBR) [ 57 , 58 , 59 , 60 ] برای ترسیم ناحیه سوخته با استفاده از تصاویر Landsat 8 قبل از آتش سوزی و پس از آتش سوزی (باندهای 5 و 7) و پس از آن انتخاب شدند. با استفاده از داده های ژئومورفولوژیکی و زمین شناسی، پشتیبانی شده توسط کار میدانی فشرده.
شاخص dNBR ابتدا برای تعریف شدت سوختگی محاسبه شد ( شکل 2 )، که مناطقی را که پوشش گیاهی تقریباً در آن وجود ندارد، نشان داد. دو کمپین میدانی در اکتبر 2019 (13/10/2019 و 19 اکتبر 2019) و یک کمپین اضافی در فوریه 2020 (23 فوریه 2020) برگزار شد. آخرین بررسی در اکتبر (11 اکتبر 2020) برای برآورد و مکان یابی فرسایش سالانه انجام شد. آخرین بررسی فقط در S1 انجام شد، به دلیل طغیان یک پوشش گیاهی جدید در S2 (به دنبال یک رویداد سیل در 9 اوت 2020).
3.2. تکنیک بدست آوردن تصویر پهپاد
در این تحقیق از DJI Phantom 4 استفاده شد ( شکل 3با سنسور دوربین 1/2.3 اینچی 12.4 مگاپیکسلی با FOV 94 درجه، سنسور دوربین 20 میلیمتری (معادل 35 میلیمتر) و اندازه تصویر 4000 × 3000. برای هر دو سایت، اپراتور با استفاده از یک دوربین نادر عکس گرفت و پهپاد را در حالت ثابت در حین گرفتن تصاویر نگه داشت. به دلیل وقوع سیمهای برق در S1 و تیرگی قابل توجه درخت در S2، هیچ برنامه پرواز خودکاری از پیش تعیین نشده بود. حداقل همپوشانی تصویر 80% و حداکثر همپوشانی رو به جلو و جانبی به 95% در مناطق خاص مورد علاقه، در بالاترین ارتفاعات رسید. حداقل ارتفاع پرواز 5 متر از سطح زمین (AGL) در بالاترین ارتفاع منطقه مورد مطالعه بود. . یک پرواز اضافی در 11 اکتبر 2020 در 2 متر AGL انجام شد تا دقت در امتداد کانالی که قبلاً شکل گرفته بود و از مرکز منطقه مطالعه می گذرد افزایش یابد. در نتیجه، ارتفاع پرواز در S1 از 5 متر AGL (در 11 اکتبر 2020 به 2 متر AGL برای کانال رسید، که منجر به 0.4 میلی متر/پیکسل فاصله نمونه برداری از زمین-GSD) در بالاترین نقطه، تا 15 متر بالاتر از پایین ترین نقطه (2.7) تغییر کرد. میلیمتر/پیکسل GSD)، در حالی که در S2 تصاویر از 5 متر (1 میلیمتر/پیکسل GSD) تا 13 متر AGL (2.3 میلیمتر/پیکسل GDD) گرفته شده است. به طور کلی ارتفاع پرواز به دلیل موانعی مانند باقیمانده ساقه درختان و تاج پوشش، خطوط برق و شیب امکان ثابت ماندن نبود.
بررسی های پرواز منجر به 282 عکس (در S1) و 298 عکس (در S2) شد که در 19 اکتبر 2019 گرفته شد، در حالی که 315 عکس (در S1) و 217 عکس (در S2) در 23 فوریه 2020 گرفته شد. برنامه های پروازی مختلفی انجام شد. برای هر منطقه در سایت S1 هیچ پوشش گیاهی وجود نداشت، بنابراین ما توانستیم با ارتفاع متوسط تقریباً ثابت پرواز کنیم. در S2 ما نیاز داشتیم که بیشتر اوقات در زیر یا حتی درون تاج درختان باقیمانده پرواز کنیم، بنابراین تصاویری بیش از آنچه انتظار می رود بر اساس منطقه سایت به دست آوردیم. برای S1 از 7 صفحه آلومینیومی مستطیلی به عنوان نقاط کنترل زمینی (GCP) استفاده کردیم، در حالی که برای S2 از 4 GCP استفاده کردیم. ما GCP بیشتری را در S1 نصب کردیم، زیرا هر دو ناحیه ویژگیهای مشابهی دارند و از تنظیمات جذب تصویر مشابهی استفاده کردیم. در نتیجه، تفاوت در تعداد GCP بر اساس وسعت منطقه بود. صفحات آلومینیومی بهترین راه حل برای استفاده از آنها برای هر دو تکنیک در نظر گرفته شد. با استفاده از اهداف آلومینیومی، ما فرض کردیم که هیچ تغییر شکلی روی اهداف وجود نخواهد داشت و در نتیجه GCP غیر قابل اندازه گیری می شود. از سوی دیگر، ما به بازتاب هدف خوبی برای روش TLS دست یافتیم. GCP به طور مساوی در سراسر مناطق مورد مطالعه پخش شد و با استفاده از یک RTK GNSS، با دقت دامنه <1 سانتی متر در صفحه افقی و 1.7 سانتی متر در محور عمودی بررسی شد.
ارتفاع پرواز بر اساس ویژگی های هر سایت (بافت خاک، محتوای شن، توپوگرافی و پوشش گیاهی)، با تمرکز بر مناطق مورد علاقه با افزایش همپوشانی تصویر در طول پرواز انتخاب شد. تصاویر به دست آمده با استفاده از Agisoft PhotoScan Metashape Professional (نسخه 1.5.5) به صورت فتوگرامتری پردازش شدند. گردش کار کامل مطالعه در شکل 4 خلاصه شده است .
3.3. تکنیک TLS
در این مطالعه، ما بر روی ایجاد ابر نقطهای که با روش LiDAR برای توصیف هندسه سطح به دست آمده است، تمرکز کردیم. در مورد ما، توپوگرافی در مقیاس کوچک پس از رویداد آتش سوزی تغییر کرد. در نتیجه، زهکشی های کوچکی به دلیل سرریز آب سطحی و خواص خاک سطحی (جبه سطحی) ایجاد شد. برای این منظور از سنسور Optech Ilris 3D LiDAR استفاده شد ( شکل 3 ، جدول 1) .). تجهیزات کامل شامل سنسور Ilris، سه پایه، باتری ها و کامپیوتر قابل حمل است که از طریق اترنت با سنسور متصل می شود. از کج شدن سنسور جلوگیری شد تا کاملاً موازی با سطح باشد. اندازهگیریها از طریق نرمافزار Ilris Controller (و Parser) در یک کامپیوتر لپتاپ قابل حمل ضبط و ذخیره شدند. ترتیب اندازه گیری لیزر Ilris در شکل 5 نشان داده شده است. Φ زاویه پرتو لیزر (2φ = 40 درجه زاویه اسکن پرتو لیزر یا میدان دید در جدول 1 )، X میانگین فاصله و Y فاصله عمودی پنجره اسکن است. در نتیجه، برای فاصله متوسط 10 متر، فاصله Y 7.28 متر خواهد بود.
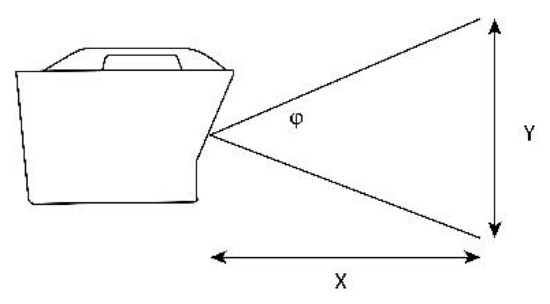
شکل 5. پنجره اسکن، مطابق با مشخصات سیستم LiDAR زمینی Ilris 3D Optech و [ 61 ].
نرم افزار Controller اجازه تجسم ثابت را در طول اندازه گیری حسگر LiDAR در زمان واقعی می دهد. با توجه به وجود موانع زیاد در هر دو منطقه مطالعه، تنها یک موقعیت اسکن در هر سایت انتخاب شد. لازم به ذکر است که در تمامی اسکنها تنها آخرین بازده (حالت پالس) انتخاب شده است، زیرا رشد احتمالی پوشش گیاهی بین کمپینهای مختلف اسکن، پارامترهای ابر نقطه را تغییر داده و بر روند مقایسه تأثیر میگذارد. با انتخاب گزینه آخرین پالس، در برخی مناطق از بازتاب پوشش گیاهی جلوگیری شد، زیرا سنسور فاصله هدف را از آخرین پالس پرتو ساطع شده تخمین زد. هر مجموعه داده TLS با نقاط اندازهگیری شده با GNSS (GCP) ثبت شد و در سیستم مختصات EGSA ’87 (EPSG 2100) پیشبینی شد. بخش 4 . پارامترهای تعریف شده هر اسکن در جدول 2 ارائه شده است.
خطای مکانیکی سیستم TLS Ilris 3D که با عملکرد سنسور مرتبط است، با اسکن همان فضای داخلی، دو بار متوالی، بدون تغییر در پارامترهای اسکن محاسبه شد. اسکنر ابتدا در یک موقعیت خاص تنظیم شد. اولین اندازه گیری تکمیل شد، سپس اسکنر دوباره راه اندازی شد و دوباره در همان موقعیت کار کرد. پس از به دست آوردن اسکن دوم، مجموعه داده های اسکن شده را با هم مقایسه کردیم و خطای 2 سانتی متر را محاسبه کردیم.
3.4. پردازش SfM-Agisoft Metashape Pro
فراداده تصاویر به دست آمده شامل مختصات به دست آمده توسط GPS داخلی پهپاد است. این داده ها باید قبل از فرآیند هم ترازی حذف می شدند تا از عوارض سیستم های طرح ریزی مختلف در طول فرآیند ارجاع جغرافیایی جلوگیری شود. در مراحل بعدی، یک گزینه با دقت بالا برای استخراج ابر متراکم، و سطوح دقیق (مش و بافت) استفاده شد. به محض اینکه مدل کاشی شده توسعه یافت، GCP را برای georeference مدل اضافه کردیم و ابر نقطه و DSM را استخراج کردیم.
مراحل مهم در طول پردازش، که بیشتر مورد تجزیه و تحلیل قرار می گیرند:
-
استخراج TIN (شبکه نامنظم مثلثی). Agisoft Metashape Pro یک فایل TIN میانی (شبکه مثلثی نامنظم) مربوط به یک ابر نقطه ای با چگالی بالا (“ابر نقطه متراکم”) می سازد. این TIN می تواند چگالی نقطه را متمایز کند و می تواند موقعیت هر نقطه را با توجه به نقش برجسته پیچیده مشخص کند. در نتیجه نمایش بهتری از خصوصیات ژئومورفولوژیکی (حوضه های آبخیز و غیره) حاصل می شود. سپس نقاط توپوگرافی استخراج شده (نقاط دارای اطلاعات ارتفاع) برای صادرات به عنوان مدل مش در دسترس هستند.
-
بافت. بافت نقش برجسته برای نمایش مدل و تحلیل زیر بسیار مهم است. الگوریتم بافت مربوط به ساخت TIN است. Agisoft Metashape از روشهای زیر (حالت نقشهبرداری) برای بازسازی بافت استفاده میکند: (الف) عمومی، (ب) ارتوفوتوی تطبیقی، (ج) اورتوفوتو، (د) کروی، (ه) دوربین تکی، (و) حفظ UV. با توجه به ویژگی های سایت های آزمایشی ما، رویکرد عمومی را انتخاب کردیم.
-
دقت. دقت روش با منبع داده و روش ساخت مدل تعریف می شود. به عنوان مثال، در طول جمع آوری داده ها، اعوجاج شعاعی لنز داخلی پهپاد باید در نظر گرفته شود. پوشش گیاهی همچنین میتواند دقت مدل را تعدیل کند، در نتیجه، باید قبل از شروع مدلسازی Agisoft در بررسیهای تشخیص تغییر خاک حذف شود.
گردش کار دقیق شامل مراحل زیر است: (الف) حذف ابرداده از عکسها، (ب) کالیبراسیون دوربین، (ج) انتخاب همه عکسهای مورد نیاز، (د) تراز کردن عکسها و ایجاد ابر متراکم (کیفیت بالا و تعریف فیلتر ملایم)، ( ه) ساخت مش، بافت و مدل کاشی، (f) نشانگرها را اضافه و بررسی کنید (نقاط کنترل زمینی-GCP، بررسی کنید که نشانگرها و GCP یک نام دارند/تعریف سیستم مختصات)، (ز) خطای نشانگرها را بررسی کنید، ( h) ساخت DTM و (i) نقطه صادرات ابر (متراکم/پراکنده)، DTM.
پرواز در ارتفاع پایین و همپوشانی قابل توجه تصویر (بیش از 80٪) منجر به محصولات نهایی با وضوح بالا شد (جزئیات را در جدول 3 ببینید ).
3.5. Point Cloud Processing-CloudCompare
CloudCompare یک بسته نرم افزاری است که برای طیف گسترده ای از برنامه های علوم زمین، با نمایش و پردازش ابرهای نقطه سه بعدی استفاده می شود. در ابتدا، برای اولین بار به عنوان بخشی از یک پروژه CIFRE در سال 2004 مورد استفاده قرار گرفت که توسط Electricite de france (وب سایت EDf—کتابچه راهنمای کاربر CloudCompare نسخه 2.6.1) مورد استفاده قرار گرفت. این برای تجزیه و تحلیل ابرهای نقطه ای از طریق مقایسه متناظر بین ابرهای مختلف طراحی شده است [ 62]. در طول فرآیند و تحقیق مرجع، به این نتیجه رسیدیم که بهترین رویکرد برای تشخیص تغییر خاک، مقایسه ابرهای نقطهای به جای DTM است. در نظر گرفته شد که مقایسه نقطه به نقطه در ابعاد XYZ (پردازش ابر نقطه سه بعدی) بهتر عمل می کند، و از درونیابی در داده های دو بعدی که ممکن است برای یک مقایسه کامل در سه بعدی ناکافی باشد، اجتناب می کند. بنابراین، نرم افزار CloudCompare (یک نرم افزار منبع باز) به عنوان بهترین راه حل برای مقایسه ابرهای نقطه مشتق شده از پهپاد-TLS در نظر گرفته شد. نمودار نقطه ابری نمایش داده شده توسط CloudCompare پردازش را در یک محیط کاربر دوستانه آسان تر می کند. برای سایت های مطالعه خود، از بازسازی شکل سه بعدی ابرهای نقطه استفاده کردیم. این فرآیند به زمان محاسباتی قابل توجهی نیاز دارد و برخی از مسائل مربوط به پوشش در صحنه های پیچیده باید حل شود. یکی از ویژگی های قابل توجه نرم افزار کاهش حجم داده ها در طول پردازش آنها است (ابزار نمونه برداری فرعی). این امر در برخی موارد به دلیل حجم بالای داده های به دست آمده توسط حسگرهای TLS و UAV ضروری است. نرم افزار CloudCompare با استفاده از ساختار Octree خاص، امکان تجزیه و تحلیل داده های سه بعدی با حجم شدید را فراهم می کند.
برخی از ابزارهای مورد استفاده به شرح زیر است:
- 4.
-
نمونه گیری فرعی این روش با حذف نقاط ابر نقطه اصلی، حجم کل داده ها را کاهش می دهد. امتیازها با در نظر گرفتن امتیاز نمونه گیری و درصد امتیاز استفاده شده توسط کاربر انتخاب می شوند. با افزایش تعداد نقاط، مدت زمان فرآیند نیز افزایش می یابد. امتیاز بیشتر منجر به همبستگی نقاط بهتر می شود. ما فاصلهی تفکیک میلیمتری را در اندازهگیریهای TLS انتخاب کردیم تا دقت نتایج تشخیص تغییر استخراجشده را بررسی کنیم، زیرا میانگین فاصله اهداف به دلیل وجود موانع محدود شده بود (مثلاً ساحل رودخانه در S1 و درختان در S1 و S2). برای دستیابی به یک ابر نقطه ای با کیفیت بالا، به جای نمونه برداری فرعی از تقسیم بندی ابر نقطه اصلی استفاده شد. بنابراین، ما موارد زیر را حذف کردیم: (الف) صدای ابر، (ب) نقاط خارج از منطقه مورد مطالعه،
- 5.
-
ثبت. این مرحله پردازش یکی از مهم ترین مراحل در تحلیل ابر نقطه ای محسوب می شود. در طول ثبت نام، ابرهای نقاط مختلف با انتخاب جفت نقطه (ابزار align) در نرم افزار CloudCompare به خوبی تراز می شوند. این روش شامل ثبت هر ابر نقطه (TLS یا SfM مشتق شده) با نقاط GCP مشتق شده از GNSS است. یک فرآیند اضافی برای چیدن نقاط پایدار مشترک (به عنوان مثال، رخنمون ها و درختان) در هر دو ابر انتخاب شد، به منظور اینکه ابرها به طور یکسان در یکدیگر ثبت شوند، رخنمون ها تنها در S1 استفاده شد، زیرا پوشش خاک فرسوده طولانی در S2، جایی که فقط نقاط درختی مشترک در دسترس بود. در این مرحله، میتوانیم بر اساس استفاده از GNSS به دقت سانتیمتر دست یابیم که منجر به مقایسه مدل به مدل با کیفیت بالا میشود. بخش 4 .
- 6.
-
رنگ آمیزی ابر نقطه ای حسگر Ilris 3D که مورد استفاده قرار گرفت، شامل نرم افزاری برای تخصیص مقادیر RGB برای تولید یک ابر نقطه با رنگ واقعی نیست. در نتیجه، با توجه به مقدار شدت، رنگ های مختلفی را در هر نقطه اختصاص دادیم.
- 7.
-
حذف پوشش گیاهی اگرچه در اسکن های اولیه ما پوشش گیاهی قابل توجهی نداشتیم، اما مجبور شدیم درختان سوخته و درختچه های کوچک را حذف کنیم. به همین دلیل، ما از الگوریتم فیلتر شبیه سازی پارچه (CSF) استفاده کردیم که نقاط زمین را در ابرهای نقطه LiDAR بازگشتی گسسته [ 63 ] و ابرهای مشتق شده از پهپاد استخراج می کند. با استفاده از CSF، تمام نقاط زمین را جدا کردیم و یک ابر نقطه جدید بدون پوشش گیاهی استخراج کردیم. در نهایت، ما هر نقطه مرتبط با پوشش گیاهی را که در ابر جدید باقی مانده بود، به صورت دستی حذف کردیم.
- 8.
-
در طول پردازش CloudCompare، اشاره شد که با استفاده از تکنیک همترازی ویژگیهای همسان در ابرهای نقطهای مختلف، دقت و ارجاع جغرافیایی در مختصات دنیای واقعی افزایش مییابد. ویژگی هایی مانند رخنمون در S1 که برای این منظور استفاده می شود، منجر به دقت هم ترازی کمتر از 1 سانتی متر می شود، در حالی که در S2، به دلیل پوشش خاک گسترده، تنها درختان به عنوان ویژگی های پایدار رایج (همان دقت به دست آمده) امکان پذیر بود. در نتیجه، تعداد GCP استفاده شده کافی در نظر گرفته می شود.
- 9.
-
M3C2 (Multiscale Model to Model Cloud Comparison) محاسبه فاصله [ 64 ]. با استفاده از الگوریتم M3C2 و محاسبه نرمال های عمودی، ما TLS را به TLS و UAV را به UAV (2019-2020) برای هر سایت مقایسه کردیم. با توجه به [ 64] الگوریتم فاصله محلی دو ابر نقطه را در ارتباط با تشخیص سطح معمولی ترکیب می کند که تغییرات سه بعدی در جهت سطح را دنبال می کند. این الگوریتم دارای مزیت عملکرد مستقیم بر روی ابرهای نقطه و تخمین فاصله اطمینان بسته به ویژگی های ابر نقطه و خطای ثبت است. پس از استفاده آزمایشی از مقادیر مختلف و گزینه “حدس زدن پارامترها” (ارائه شده توسط نرم افزار)، به 0.20 متر قطر مقیاس نرمال و 0.10 متر قطر مقیاس طرح ریزی (در S1 و S2، برای هر دو روش SfM و TLS) برای 19 نتیجه رسیدیم. محاسبات اکتبر 2019 تا 23 فوریه 2020، در حالی که 0.30 متر و 0.20 متر به ترتیب برای محاسبات 23 فوریه 2020 تا 11 اکتبر 2020 و (19 اکتبر 2019 تا 11 اکتبر 2020) استفاده شد. تمام نقاط “ابر نقطه شماره 1” تعریف شده به عنوان نقاط اصلی برای محاسبات عادی استفاده شد.
4. نتایج
هر دو تکنیک TLS و UAV برای ارزیابی و اعتبارسنجی فرسایش خاک از طریق مدلسازی سه بعدی مقایسه شدند. به نظر میرسد که ابرهای نقطهای با کیفیت بالا بهدستآمده بهطور دقیق میکروتوپوگرافی و بافت را شبیهسازی میکنند. در این مطالعه از تحلیل مقایسه نقطه به نقطه استفاده کردیم. فرسایش با استفاده از سه مجموعه داده از دو حوضه به دست آمده با دو روش مختلف (فتوگرامتری با استفاده از تصاویر به دست آمده توسط پهپاد و TLS) ارزیابی شد. نتایج ارزیابی فرسایش محلی دقیقتری را با استفاده از ابرهای نقطهای مشتق از پهپاد در مقایسه با روش TLS نشان میدهد. این را می توان عمدتاً با تنظیمات اکتساب داده توضیح داد، (یعنی ضبط زاویه عمودی عکس ها) و ابر نقطه متراکم تولید شده توسط تجزیه و تحلیل داده های پهپاد، که اثر سایه را به حداقل رساند. از سوی دیگر، نرخ فرسایش کل شیب با تکنیک TLS بهتر نشان داده می شود.
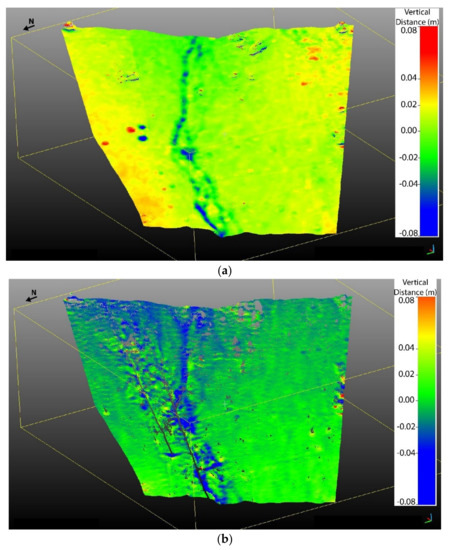
فرسایش محلی سالانه در S1 با رویکرد فتوگرامتری پهپاد، با دقت بالا در طول کانال، ردیابی و کمی سازی شد. فرسایش خاک بر اساس UAV-SfM به 0-48 سانتی متر رسید، در حالی که محدوده 0-40 سانتی متر توسط TLS استخراج شد. شکل 6 و شکل 7 و جدول 4 و جدول 5 ، فرسایش موضعی قابل توجهی را برای S1 نشان می دهد که عمدتا در امتداد کانال قرار دارد. در شکل 6 a، ناحیه دایره قرمز حداکثر فرسایش محلی را در هر مقایسه ای که انجام دادیم نشان می دهد. به جز کل فرسایش سالانه در S1 ( شکل 6 a,b, جدول 4فرسایش همچنین چهار ماه پس از اولین کار میدانی (19 اکتبر 2019 تا 23 فوریه 2020) در هر دو سایت اندازه گیری شد ( شکل 7 و شکل 8 ). در طی این دوره، تنها 3 تا 4 سانتیمتر حداکثر فرسایش موضعی توسط فتوگرامتری مبتنی بر پهپاد و تکنیکهای TLS در ناحیه دایرهای قرمز S1 اندازهگیری شد ( شکل 7 )، در حالی که هر دو روش میانگین فرسایش را در حدود 1.5 سانتیمتر در S2 تخمین میزنند ( شکل 8 ، جدول) . 4 ).
این مشاهدات از نظر تغییر حجم و برآورد فرسایش شیب کل نیز مشابه هستند. در S1 مناطقی را در نظر گرفتیم که فرسایش را میتوان تخمین زد و پوشش گیاهی بر اندازهگیریهای ما تأثیری نخواهد داشت. بنابراین، مناطق خاصی (m2) را انتخاب کردیم که در آن برآوردهای TLS و فتوگرامتری قابل مقایسه هستند. هر دو تکنیک تغییر حجم کانال سالانه حدود -3.00 m3 را به همراه داشتند (همچنین به جدول 4 b، تغییر حجم -3.00 m3 برای TLS و 2.90 – m3 برای تکنیک SfM مبتنی بر پهپاد، که تقریباً در 60 متر مربع اندازه گیری شده است مراجعه کنید .در طول کانال). اندازه گیری ها در نظرسنجی های 4 ماهه و 8 ماهه نیز قابل مقایسه هستند ( جدول 4 ). ما فرسایش حجم کانال ( جدول 4 ب) را از اندازه گیری های فرسایش شیب جدا کردیم ( جدول 4 ج). جدول 4c نشان می دهد که هر دو تکنیک فرسایش شیب متوسط مشابهی را به همراه داشتند. اختلاف 1 سانتیمتری برآورد فرسایش شیب کل در دادههای SfM در مقایسه با دادههای TLS، به دلیل تیرگی پوشش گیاهی است که منجر به فرسایش شیب کل 0.005-0.01 متر در 19 اکتبر 2019 تا 23 فوریه 2020 و 0.01 متر بر حسب کل سالانه میشود. نرخ فرسایش در تکنیک TLS، یک واریانس جزئی مشاهده شد. الگوی فرسایش در حدود ¾ از کل سطح شیب در داده های TLS شناسایی شد، که همچنین وقوع شستشوی شیب را نشان می دهد ( شکل 6 و شکل 7). در نتیجه، 0.01-0.015 متر از نرخ فرسایش کل در یک بررسی 4 ماهه ارزیابی شد (که همچنین با نرخ فرسایش کل 0.015 متر در S2 قابل مقایسه است)، در حالی که 0.02 متر از نرخ فرسایش کل شیب در 8 ماهه برآورد شد. و دوره سالانه ( جدول 4 ).
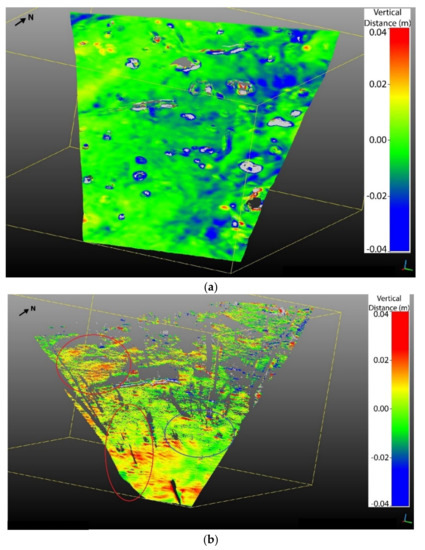
جالب است بدانید که در طی بررسی هشت ماهه (23 فوریه 2020 تا 11 اکتبر 2020) افزایش عمده (رویکرد پهپاد شکل 9 الف، رویکرد TLS شکل 9 ب) در فرسایش محلی خاک را می توان به شدت بارندگی 9 نسبت داد. آگوست 2020، زمانی که 299.6 میلیمتر بارندگی توسط ایستگاه هواشناسی استنی [ 65 ] در رصدخانه ملی آتن در نزدیکی منطقه پساخنا اندازهگیری شد که معادل 14.3 درصد از کل بارش سالانه منطقه است.
علیرغم عملکرد بهتر فتوگرامتری مبتنی بر پهپاد در ارزیابی محلی سالانه، ارزیابی زمانی میانی نتایج متفاوتی را نشان داد. به طور خاص، به نظر می رسد الگوی فرسایش خاک در بررسی 4 ماهه در S1 با تکنیک TLS (فاصله حسگر بالاتر) بهتر نشان داده شود، به عنوان مثال، شستشوی شیب در تجزیه و تحلیل TLS در مقایسه با S2، که در آن پهپاد- مدل مشتق شده مناسب تر به نظر می رسد. واضح است که هر دو تکنیک در S2 نتایج مشابهی را در مورد رسوب خاک (مناطق دایره قرمز در شکل 8 ب) و فرسایش (مناطق دایره آبی در شکل 8) به همراه دارند.ب). در مطالعه ما، به نظر می رسد حسگر LiDAR در فواصل طولانی (بیش از 40 متر در S1) با دقت بیشتری عمل می کند. روش UAV-SfM برای ترسیم فرسایش در S2 به دلیل زاویه دید TLS که باعث اثر سایه قابل توجهی می شود، مناسب تر در نظر گرفته می شود. این موضوع در مناطقی که موقعیتهای مختلف اسکن TLS به دلیل موانع محدود شدهاند، مانند ساقه درختان مهم است. نتیجه نهایی نیز به شیب شیب و زاویه دید TLS مربوط می شود که در حالت ایده آل باید نسبت به شیب عمودی باشد. مناطق مسطح بدون پوشش گیاهی (اسکن شده در ارتفاع 5-10 متری AGL) با دقت بیشتری توسط ابرهای نقطه ای مشتق از پهپاد بازسازی می شوند.
همانطور که انتظار می رفت، دقت پایینی نسبت به مرزها برای تمام ابرهای نقطه ای مشتق از پهپاد مشاهده شد. این به همپوشانی تصویر پایین، پوشش گیاهی، یا فقدان GCP در نزدیکی مرزهای منطقه نسبت داده می شود. ما میانگین خطای 2 سانتی متری را در هر اسکن (در S1) در تمام جهات XYZ توسط تفاوت نقطه GPS GNSS XYZ محاسبه کردیم ( جدول 5 a)، در حالی که خطای ثبت هر ابر نقطه در طول ثبت آن با GCP (پردازش CloudCompare) از 0.02 متر (ابرهای نقطه ای مشتق از پهپاد) تا 0.03 متر (ابرهای نقطه ای مشتق شده از TLS، جدول 5 ب) متغیر بود. این خطای ثبت GCP در طول تعریف پارامتر فاصله M3C2 در نظر گرفته شد.
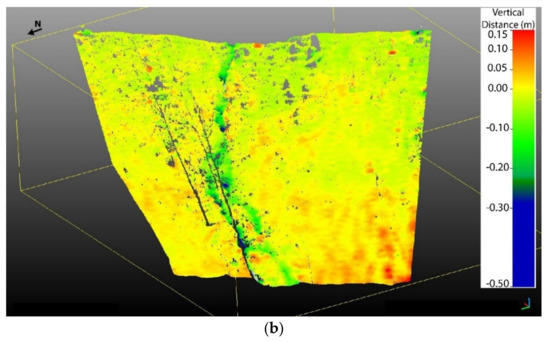
ما از 7 GCP (G1-G7) در S1 استفاده کردیم، در حالی که در S2، از 4 GCP (P1-P4، فقط برای تجزیه و تحلیل ثبت نام) استفاده کردیم ( شکل 10 ). ابرهای نقطه ای مشتق از پهپاد و TLS برای هر اسکن در S1 با استفاده از پنج مورد از هفت GCP، ارجاع جغرافیایی شدند. دو GCP (G2 و G5) برای ارزیابی دقت XYZ استفاده شد ( جدول 5 a) با مقایسه مختصات XYZ استخراج شده از ابر نقطه، با مختصات واقعی، همانطور که در میدان با استفاده از RTK GNSS اندازه گیری شد. در اکتبر 2019، GCP مورد استفاده در ابر نقطه ای مشتق از پهپاد، G7 به جای G5 بود، زیرا هدف G5 در طول پرواز UAS سقوط کرد، در حالی که در تکنیک TLS ما از G5 استفاده کردیم. در تمام تحلیلهای دیگر، GCP G2 و G5 برای ارجاع جغرافیایی استفاده شد ( شکل 10آ). با توجه به تجزیه و تحلیل خطای XYZ GCP، محدوده خطای 0-0.02 متر در S1 محاسبه شد. در نتیجه خطای 2 سانتی متری خطای اندازه گیری ما در نظر گرفته می شود.
در S2، به دلیل منطقه محدود، 4 GCP به منظور تراز کردن ابرهای نقطه استفاده شد ( شکل 10 ب). GNSS نیز در این سایت مورد استفاده قرار گرفت، اما به دلیل مقدار کم GCP و محدوده مطالعه محدود، برای ارزیابی خطا استفاده نشد. در این سایت (S2)، خطای ثبت تراز بین ابرهای نقطه و GPS در ارتباط با خطای ثبت بر اساس ویژگی های پراکنده شده در منطقه مورد مطالعه (درختان) به عنوان خطای اندازه گیری فرسایش کل ارزیابی شد. این مقدار برای روش SfM 0.02 متر و برای روش TLS 0.03 متر برآورد شده است ( جدول 5الف) با توجه به تکنیک ثبت/تراز توضیح داده شده در بالا. خطای ثبت ویژگی توزیع شده کمتر از 1 سانتی متر برای هر دو TLS و SfM (در S1 و S2) ارزیابی شد. این تفاوت 1 سانتی متری ثبت GPS را می توان به اثر سایه و ابر نقطه پراکنده از اشتقاق ابر نقطه TLS نسبت داد.
چگالی ابرهای نقطه ای ( جدول 5 d را نیز ببینید) در داده های مشتق شده از پهپاد بیشتر است، به دلیل تعداد زیادی نقاط تولید شده توسط الگوریتم SfM، در حالی که تکنیک LiDAR تعداد نقاط به طور قابل توجهی کمتری را در هر دو ناحیه نشان می دهد. جدول 5ج). تفاوتها در همان منطقه مورد مطالعه بین تکنیک جمعآوری دادههای مشابه به پارامترهای تنظیمشده در طول جمعآوری دادهها (به عنوان مثال، TLS) و عملکرد دستی پهپاد به دلیل تیرگی پوشش گیاهی، که اجازه یک پرواز طرح خودکار را نمیداد، نسبت داده میشود. با این وجود، ابر نقطه مشتق شده از TLS به دلیل توانایی آن برای مقابله با چمن کم، در هر دو سایت با بازسازی سطح بهتر در S1 کافی در نظر گرفته می شود. شباهت های زیادی در هر دو روش از نظر ارزیابی فرسایش وجود دارد. به نظر می رسد پهپاد-SfM در برآورد نرخ فرسایش محلی (یعنی کانال) بهتر عمل می کند، در حالی که روش TLS در تخمین فرسایش کل بهتر عمل می کند، به دلیل اینکه کل منطقه را پوشانده است، که پاک کردن صحیح آن با استفاده از پهپاد-SfM مشتق شده غیرممکن است. ابر نقطه همچنین، الگوریتم CSF برای حذف پوشش گیاهی می تواند در ابرهای نقطه ای مشتق از پهپاد در هنگام هدف قرار دادن حداکثر نرخ فرسایش محلی بهتر عمل کند. این به این دلیل اتفاق میافتد که بخش قابل توجهی از نقاط را حذف میکند و در نتیجه چگالی نقطهای کمتری در ابرهای نقطهای مشتقشده از TLS در مقایسه با ابرهای نقطهای مشتقشده از پهپاد ایجاد میکند.
5. بحث
ابرهای نقطه ای به عنوان خط پایه برای تولید مدل های سه بعدی برای بازسازی سطوح تحت یک سیستم مختصات تعریف شده (محلی یا جهانی) در نظر گرفته می شوند. با توجه به دانش ما، هیچ بررسی دقیقی درباره فرسایش خاک در رابطه با مقایسه الگوریتمهای ابر نقطهای برگرفته از پهپاد و TLS در مناطق آسیبدیده انجام نشده است. در این مطالعه، فرسایش با استفاده از سه مجموعه داده از دو حوضه بررسی شد. نتایج ارزیابی دقیقتری حداکثر فرسایش محلی (در امتداد کانال) با استفاده از فتوگرامتری مبتنی بر پهپاد در مقایسه با روش TLS نشان میدهد. TLS در محاسبه نرخ فرسایش کل، در مقایسه با فتوگرامتری مبتنی بر پهپاد، به دلیل وجود چمن با ارتفاع 1-2 سانتی متر، بهتر عمل کرد.
این را میتوان عمدتاً با ثبت زاویه عمودی عکسها و ابر نقطه متراکمتر ایجاد شده توسط فتوگرامتری مبتنی بر پهپاد توضیح داد، که اثر سایه را به حداقل رساند. هر دو تکنیک دارای مزایا و محدودیتهایی هستند، که باید همیشه هنگام بررسی برای انتخاب بهترین روش در نظر گرفته شوند، با این حال، به نظر میرسد ابرهای نقطهای با کیفیت بالا، میکروتوپوگرافی و بافت را به دقت شبیهسازی میکنند. تجزیه و تحلیل ابر نقطه شامل یک مقدار XYZ تعریف شده برای هر نقطه است، به دنبال آن یک مقدار شدت (روش TLS) یا یک مقدار RGB (روش UAV). این نوع تجزیه و تحلیل چند برداری (کره به کره و تجزیه و تحلیل نقطه به نقطه) در حال حاضر یک فناوری پیشرفته با پتانسیل قابل توجه در چندین کاربرد زمین شناسی است [ 13 ]., 49 , 66 , 67 ]. همانطور که Monserrat و Crosetto [ 68 ] نشان می دهند، DEM نمی تواند به طور کامل پیچیدگی سطح را به دلیل داده های 2.5 بعدی مورد استفاده نشان دهد (فقط یک مقدار Z در مجموعه ای از مختصات X، Y وجود دارد). مقایسه ابر نقطه ای روش دقیق تری در طول پردازش داده ها در نظر گرفته می شود. برای این منظور تصمیم گرفتیم در طول این تحقیق از درون یابی استفاده نکنیم و فایل های فرمت داده TIN را استخراج نکنیم تا خطای مربوطه به حداقل برسد. به نظر می رسد بسیاری از محققان شروع به استفاده از نقشه های متمایز یا الگوریتم M3C2 و مقایسه ابر نقطه ای در تشخیص زمین لغزش، رویدادهای سیل یا حتی در تجزیه و تحلیل جنگل ها کرده اند [ 14 ، 69 ، 70 ، 71 ]. کاربردهایی وجود دارند که بازسازی بافت با کیفیت بالا مورد نیاز است، مانند ارزیابی نرخ لغزش خطا یا بررسیهای مبتنی بر جذب سیگنال [ 15 ، 16 ، 17 ، 18 ، 19 ]. برای این کاربردها، حسگر غیرفعال روش پهپاد در حال حاضر ناکافی در نظر گرفته می شود و روش TLS به طور گسترده ای به جای آن استفاده می شود. تجزیه و تحلیل برداری سطحی پیشنهاد شده توسط دی و همکاران. [ 61 ] در نظرسنجیهای آینده ما برای مقایسه با رویکرد نقطه به نقطه استفاده میشود.
میل برجستگی و هدف هدف تحقیق بیانگر روش مناسب (فتوگرامتری یا TLS) خواهد بود. مزایای پلت فرم پهپاد شامل اندازه و وزن کوچک تجهیزات است که امکان استفاده از یک سیستم قابل حمل آسان را فراهم می کند که می تواند به مناطق دورافتاده نزدیک شود. علاوه بر این، جامعه علمی می تواند از هزینه کم تجهیزات در مقایسه با TLS بهره مند شود، که منجر به بررسی های گسترده با دقت بالا می شود. از سوی دیگر، شرایط آب و هوایی و قدرت باتری می تواند به طور قابل توجهی عملکرد پهپاد را در طول بررسی به حداقل برساند یا مبهم کند. برعکس، سنسورهای TLS دارای دقت عالی و زمان پردازش ابری نقطه پایین تری هستند. یکی از معایب بالقوه این تکنیک مشکلات خط دید است، 37 ]. البته این را می توان با تکرار بررسی از دیدگاه های مختلف حل کرد، اما این همیشه امکان پذیر نیست (مثلاً، مانند مورد ما) به دلیل محدودیت های دید زمین. روش SfM از تکنیکهای Multi-View Stereopsis (MVS) برای تعیین موقعیت دوربین و زاویه عکسبرداری برای استخراج ابر نقطه سه بعدی استفاده میکند. MVS تحت تأثیر ویژگیهای بدون بافت، انسداد، سایهها یا تفاوت در شرایط نور و زاویه عکس قرار میگیرد، محدودیتهایی که ما نیز مجبور بودیم در مناطق مورد نظر خود مدیریت کنیم. با این وجود، به دلیل روش بسیار کارآمد، هزینه کم و کیفیت بالای داده های صادراتی، این روش الزامات و اهداف دقت ما را برآورده می کند.
حذف پوشش گیاهی در طول پردازش داده ها برای هر دو روش چالش برانگیز است. شیب های تندتر با مقدار کمی پوشش گیاهی (به عنوان مثال، سایت آزمایشی ما 1) را می توان با استفاده از روش TLS به طور دقیق بازسازی کرد زیرا آخرین حالت پرتو لیزر پالسی سیستم جمع آوری داده های لیزری به حذف سریعتر پوشش گیاهی کمک می کند و شیب را دقیقاً مشخص می کند. شیب باید تا حد امکان عمود بر خط دید پرتو لیزر TLS باشد تا پرتو به سطح خاک نفوذ کرده و به سطح خاک برسد. علاوه بر این، حذف خودکار پوشش گیاهی (به عنوان مثال، الگوریتم CSF [ 72]) گاهی اوقات در برخی از برنامه های کاربردی در رویکرد TLS (به عنوان مثال، در S1 در 11 اکتبر 2020)، به دلیل رویه الگوریتم و دیدگاه های نظرسنجی TLS بسیار مفید نیست. از سوی دیگر، پوشش گیاهی معمولاً بازسازی سطحی مناسب را در ابرهای نقطه ای پهپاد پنهان می کند. رویکرد پهپاد-SfM، با توجه به چشم انداز عمودی مجموعه داده ها، پوشش سطح کل را ثبت می کند، که منجر به غیاب کامل داده (در بیشتر موارد داده های زمین) در زیر پوشش گیاهی مبهم می شود. حذف پوشش گیاهی نقطه به نقطه در طول پس پردازش زمانبر است، بنابراین تکامل الگوریتمهای تجربی منجر به کاهش زمان پردازش دادهها میشود. رویکرد SfM مبتنی بر پهپاد نتایج دقیق تری را برای تجزیه و تحلیل فرسایش محلی در مناطق عمدتا افقی یا مناطق با پوشش گیاهی کمتر ارائه می دهد، همانطور که نرخ های فرسایش محلی نشان می دهد. هدف قرار دادن کانال ها و سواحل رودخانه ها در مناطق غیر قابل دسترسی (برای مثال سایت 1). در نتیجه، ما موفق شدیم فرسایش کانال در S1 و مناطق مستعد فرسایش در S2 را از طریق روش پهپاد، یک سال پس از آتشسوزی جنگلی با دقت قابلتوجهی مشخص کنیم، همانطور که Hamshaw و همکارانش. [ 73 ] در یک سیستم رودخانه ای انجام داد. تجزیه و تحلیل اضافی نرخ کل فرسایش نشان می دهد که TLS می تواند فرسایش شیب را در مقایسه با UAV-SfM بهتر ارزیابی کند، به دلیل پوشش گیاهی با ارتفاع کم که حذف کامل از داده های مشتق شده از SfM دشوار است. مشخص شده است که هر دو روش نتایج مشابهی را در مورد توزیع مکانی و زمانی فرسایش خاک ارائه میکنند که به نتایج ما اطمینان میدهد.
در آخر باید به بهینه سازی تخمین خطا اشاره کرد. در طول کل فرآیند، اتخاذ تدابیری برای به حداقل رساندن خطا ضروری است. خطاهای مرتبط با خطای مکانیکی تجهیزات مورد استفاده، خطاهای GNSS و خطاهای تراز [ 61 ] وجود دارد. ما حداکثر خطای 2 سانتی متری را در S1 تخمین زدیم، که با خطای مکانیکی حسگر TLS نیز مرتبط است (همچنین توسط [ 61 ) توضیح داده شده است.]) و تخمین خطای XYZ GCP با توجه به مرجع RTK GNSS. خطای 2-3 سانتی متر در S2 از طریق روش ثبت بین ابرهای نقطه مبتنی بر پهپاد و TLS با GCP برآورد شد. خطای ثبت ویژگی توزیع شده اضافی در هر دو سایت کمتر از 1 سانتی متر تخمین زده شد، بنابراین روش ما برای ارزیابی خطا کافی در نظر گرفته می شود. خطاهای کم نتایج ما از طریق اندازهگیری GNSS RTK GCP، ارتفاع کم پرواز، همپوشانی بهینه، و دقت حذف پوشش گیاهی به دست آمد. خطای حدود 0.1-0.15 متر در مدل های مشتق شده از پهپاد نیز در مطالعات دیگر ذکر شده است [ 66 ]. طبق [ 74] دقت 3 سانتی متر پس از پرواز ارتفاع 70 متری از سطح زمین (AGL) پهپاد (تکنیک SfM) در حین پایش فرسایش خاک در مراکش به دست آمد. همانطور که هاروین و همکاران. [ 75 ] توجه داشته باشید، می توان به دقت هندسی 2.5-4 سانتی متر (در ارتفاع پرواز 40-50 متر) از ابرهای نقطه ای بر اساس بررسی های DGPS کینماتیک واقعی (RTK) و کل ایستگاه کل GCP دست یافت [ 21 ، 75 ، 76 ]. علاوه بر این، دقت 4 سانتیمتری نیز توسط [ 53 ] در اندازهگیری بستر خزههای قطب جنوب با استفاده از DGPS به دست آمد.
بهبودهای بیشتر در دقت را می توان با استفاده از مجموعه داده های ترکیبی دوربین، به عنوان مثال، تصاویر نادر و مایل به دست آورد. تصاویر مایل تطبیق و دقت نقاط بهبود یافته را در محیط های پیچیده زمین و شیب های تندتر ارائه می دهند [ 77 ]]. در این مقاله از تصاویر نادر به دلایل زیر استفاده شده است. اول، از آنجایی که ما برای انجام پروازهای مکرر و مقایسه نتایج برنامه ریزی کردیم، نیاز داشتیم تا حد امکان پارامترهای پرواز و دوربین ساده و ثابت را بین پروازهای متوالی اتخاذ کنیم. دوم، ما یک الگوی تحلیلی نسبتاً ساده در هر دو سایت داشتیم. سوم، در S2، جایی که درختان نیز وجود داشتند، تصاویر مورب مناطق بدون داده بزرگتری را در پشت ساقه درخت ایجاد میکردند. علاوه بر این، Agisoft 2 ابزار برای بهبود دقت مدل ها دارد. اولین ابزار Update Tool است که از مختصات نشانگرها و مکان مربوطه برای به روز رسانی مدل، با استفاده از تبدیل affine استفاده می کند. دومی ابزار بهینه سازی دوربین است که امکان تطبیق پیچیده تر (غیر خطی) مدل را با نشانگرها فراهم می کند. در نتیجه،
مسئله دیگری که با آن مواجه شدیم مقادیر مختلف فاصله نمونه برداری از زمین (GSD) بین بالاترین و پایین ترین قسمت S1 بود. در واقع، پهپاد تصاویر را در ارتفاع 5 متری AGL در بالاترین قسمت شیب به دست آورد، اما ماندن در این ارتفاع باعث کاهش GSD در پایینترین قسمتهای منطقه میشود. بنابراین، در هر کمپین پروازی، با پرواز در ارتفاعات پایین در پایه شیب، تصاویر اضافی از کل منطقه به دست آوردیم.
6. نتیجه گیری
این مطالعه جامعه علمی را با تجزیه و تحلیل مقایسه ابر نقطه ای چندمنبعی (TLS و UAV مشتق شده) در منظر چند زمانی، به ویژه در شرایط تغییر سریع از نظر فرسایش و رشد پوشش گیاهی پس از آتش سوزی در محیط های مدیترانه معرفی می کند. مزایا و معایب دو فناوری جدید برای توسعه و بهرهبرداری از ابرهای نقطهای، در تحلیل فرسایش خاک، پس از یک رویداد آتشسوزی، مورد آزمایش قرار گرفتهاند. این تجزیه و تحلیل بر اساس جمعآوری دادههای فتوگرامتری مبتنی بر TLS و پهپاد پس از آتشسوزی ویرانگر اوت ۲۰۱۹ در جزیره مرکزی اویا، یونان است. با توجه به شدت آتش سوزی و شدت بارندگی های پسین، محیط به سرعت در حال تغییر مقدار زیادی از داده های کوتاه مدت را فراهم می کند. ما این فرضیه را تأیید میکنیم که فتوگرامتری مبتنی بر پهپاد روشی مناسبتر و مقرونبهصرفهتر هنگام تمرکز بر نرخهای فرسایش محلی (نماینده مکانهای حداکثر فرسایش کانال) است، در حالی که ارزیابی حجم کل ناشی از فرسایش در کل کانال با هر دو روش، نتایج مشابهی ارائه کرد. هنگامی که تجزیه و تحلیل بر روی شستشوی شیب متمرکز می شود، به نظر می رسد رویکرد TLS دقیق تر است. کمی سازی تشخیص تغییر نیازمند اندازه گیری های دقیق و تجزیه و تحلیل پردازش است، در حالی که تفسیر نتایج نیز چالش برانگیز است. برای این منظور، مقایسه مستقیم نقطه به نقطه و الگوریتم فاصله M3C2 روشی مناسب برای تخمین فرسایش خاک در کسری از زمان مورد نیاز قبلی در نظر گرفت. علاوه بر این، زمانی که (الف) از تعداد مناسبی از GCP استفاده میشود، حداقل خطاها در حد چند سانتیمتر قابل دستیابی هستند. (ب) خطای مکانیکی به حداقل می رسد و (ج) ثبت دقیق بین مجموعه داده های ابر نقطه به دست می آید. ثابت میکند که پوشش گیاهی برای هر دو تکنیک مشکلساز است و به ترتیب باعث ایجاد اثر سایه و بازسازی سطح کاذب برای ابرهای نقطهای مشتق از TLS و UAV میشود.
این نوع تحقیقات همراه با ابزارهای نوآورانه دانش ما را در مورد تشخیص تغییر، ارزیابی فرسایش و کمی سازی گسترش می دهد. گردش کار ما می تواند با استفاده از ابزار مناسب (UAV-SfM یا TLS) برای تخمین سریع فرسایش خاک، به مدیریت مناسب منابع ژئوری پس از یک رویداد آتش سوزی در یک حوضه مدیترانه کمک کند.
مشارکت های نویسنده
مفهوم سازی، سیمونی الکسیو، یوانیس پاپانیکولائو، جورجیوس دلیجاناکیس و کلاوس ریچرتر. روش شناسی، سیمونی الکسیو، جورجیوس دلیگیاناکیس، آگلوس پالیکاراکیس و ایوانیس پاپانیکولائو؛ نرم افزار، سیمونی الکسیو، جورجیوس دلیگیاناکیس و امانویل پسومیادیس؛ اعتبارسنجی، سیمونی الکسیو، جورجیوس دلیجاناکیس، امانویل پسومیادیس و یوآنیس پاپانیکولائو؛ کار میدانی، سیمونی الکسیو، جورجیوس دلیجاناکیس و آگلوس پالیکاراکیس؛ نوشتن – آماده سازی پیش نویس اصلی، سیمونی الکسیو، جورجیوس دلیجاناکیس، امانویل پسومیادیس و یوانیس پاپانیکولائو؛ نظارت، یوانیس پاپانیکولائو. همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
منابع مالی
این تحقیق هیچ بودجه خارجی دریافت نکرد.
بیانیه هیئت بررسی نهادی
قابل اجرا نیست.
بیانیه رضایت آگاهانه
قابل اجرا نیست.
بیانیه در دسترس بودن داده ها
به اشتراک گذاری داده برای این مقاله کاربردی ندارد.
قدردانی ها
این تحقیق توسط یونان و اتحادیه اروپا (صندوق اجتماعی اروپا-ESF) از طریق برنامه عملیاتی «توسعه منابع انسانی، آموزش و یادگیری مادامالعمر» در چارچوب پروژه «تقویت پتانسیل تحقیقاتی منابع انسانی از طریق تحقیقات دکترا» ( MIS-5000432)، اجرا شده توسط بنیاد بورس های تحصیلی دولتی (ΙΚΥ)». 

تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
منابع
- Dregne، HE تخریب زمین در زمین های خشک. ارید سرزمین خشک. مدیریت 2002 ، 16 ، 99-132. [ Google Scholar ] [ CrossRef ]
- لارسن، آی جی. MacDonald، LH پیش بینی بازده رسوب پس از آتش سوزی در مقیاس دامنه: آزمایش RUSLE و WEPP مختل. منبع آب Res. 2007 ، 43 . [ Google Scholar ] [ CrossRef ]
- Shakesby، RA فرسایش خاک پس از آتش سوزی در مدیترانه: بررسی و جهت گیری های تحقیقاتی آینده. علوم زمین Rev. 2011 , 105 , 71-100. [ Google Scholar ] [ CrossRef ]
- Rengers، FK; تاکر، جنرال الکتریک؛ مودی، جی. Ebel، BA الگوهای فرسایش و رسوب آتش سوزی را با تکرار LiDAR زمینی روشن می کند. جی. ژئوفیس. Res. گشت و گذار در زمین. 2016 ، 121 ، 588-608. [ Google Scholar ] [ CrossRef ]
- افتیمیو، ن. Psomiadis, E. اهمیت ترسیم پوشش زمین در ارزیابی فرسایش خاک. محیط زیست مدیریت 2018 ، 62 ، 383-402. [ Google Scholar ] [ CrossRef ]
- مورگان، فرسایش و حفاظت خاک RPC ، ویرایش 3. Blackwell Publishing: Oxford, UK, 2005; شابک 1-4051-1781-8. [ Google Scholar ]
- کرامسوتی، م. پتروپولوس، GP; Papanikolaou، ID; کایریس، او. پیشبینیهای نرخ فرسایش Kosmas، K. از PESERA و RUSLE در یک سایت مدیترانه قبل و بعد از آتشسوزی جنگلی: مقایسه و مفاهیم. Geoderma 2016 ، 261 ، 44-58. [ Google Scholar ] [ CrossRef ]
- گولیایف، SA; باکریج، JS روشهای زمینی برای پایش فرسایش صخرهها در محیط شهری. جی. ساحل. Res. 2004 ، 20 ، 871-878. [ Google Scholar ] [ CrossRef ]
- Wawrzyniec، TF; مک فادن، LD; الوین، ا. مایر، جی. اسکودری، ال. مک آلیف، جی. Fawcett، P. تجزیه و تحلیل کرونوتوپووگرافی به طور مستقیم از داده های نقطه-ابر: روشی برای تشخیص تغییرات شیب تپه کوچک، فصلی، سیاه مسا اسکارپمنت، NE آریزونا. Geosphere 2007 , 3 , 550-567. [ Google Scholar ] [ CrossRef ]
- هاج، آر. براسینگتون، جی. ریچاردز، ک. تجزیه و تحلیل مدلهای زمین دیجیتال اسکن لیزری سطوح بستر شن: پیوند مورفولوژی به فرآیندهای انتقال رسوب و هیدرولیک. رسوب شناسی 2009 ، 56 ، 2024-2043. [ Google Scholar ] [ CrossRef ]
- Resop، JP; اسکن لیزری زمینی Hession، WC برای نظارت بر عقب نشینی Streambank: مقایسه با تکنیک های نقشه برداری سنتی. جی هیدرول. مهندس 2010 ، 136 ، 794-798. [ Google Scholar ] [ CrossRef ]
- اونیل، MA; Pizzuto، JE نرخ و الگوهای فضایی فرسایش سالانه سواحل رودخانه از طریق بررسیهای اسکنر لیزری زمینی رودخانه جنوبی، ویرجینیا نشان داده شد. گشت و گذار در زمین. روند. Landforms 2011 , 36 , 695-701. [ Google Scholar ] [ CrossRef ]
- نوگیرگ، اف. استارک، ام. قیصر، ا. ولاسیلوا، م. دلا ستا، م. ورگاری، ف. اشمیت، جی. بچت، ام. هاس، F. فرآیندهای فرسایش در کالانچی در دره اورسیا بالا، توسکانی جنوبی، ایتالیا بر اساس بررسیهای چندزمانی زمینی با وضوح بالا LiDAR و پهپاد. ژئومورفولوژی 2016 ، 269 ، 8-22. [ Google Scholar ] [ CrossRef ]
- روشکا، اس. Suomalainen، J.; بارتولومئوس، اچ. هرولد، ام. مقایسه اسکن لیزری زمینی و ساختار هواپیمای بدون سرنشین از حرکت برای ارزیابی ساختار بالای تاج پوشش در جنگلهای استوایی. Interface Focus 2018 , 8 . [ Google Scholar ] [ CrossRef ]
- ویتر، تی. رایچرتر، ک. پاپانیکولائو، آی. فرناندز-استیگر، تی. میسون، جی. تحلیل برداری لغزش با اسکن t-LiDAR با وضوح بالا. تکتونوفیزیک 2013 ، 608 ، 947-957. [ Google Scholar ] [ CrossRef ]
- ویتر، تی. پاپانیکولائو، آی. فرناندز-استیگر، تی. Reicherter، K. چاپ مجدد: تاریخچه شکسته گسل بستر: بینش رفتار پراکندگی پسروی t-LiDAR و تحلیل تغییرات ساختار. ژئومورفولوژی 2015 ، 237 ، 119-129. [ Google Scholar ] [ CrossRef ]
- اشنایدرویند، اس. میسون، جی. ویتر، تی. پاپانیکولائو، آی. Reicherter، K. تجسم 3-بعدی چینه نگاری ترانشه دیرینه لرزه ای و ثبت ترانشه با استفاده از سنجش از دور زمینی و GPR – یک تفسیر چند پارامتری. زمین جامد 2016 ، 7 ، 323-340. [ Google Scholar ] [ CrossRef ]
- میسون، جی. اشنایدرویند، اس. ویتر، تی. رایچرتر، ک. پالیکاراکیس، آ. پاپانیکولائو، آی. مچرنیچ، اس. Wiatr، T. ساختار گسل و نرخ تغییر شکل در Lastros-Sfaka Graben، کرت. تکتونوفیزیک 2016 ، 683 ، 216-232. [ Google Scholar ] [ CrossRef ]
- کاریا، دی. آبلان، ا. هیمیر، اف. ماتاشی، بی. درون، م. Jaboyedoff، M. تصحیح کانال شدت LiDAR زمینی با استفاده از مدل بازتابی Oren-Nayar: برنامه ای برای تمایز سنگ شناسی. ISPRS J. Photogramm. Remote Sens. 2016 ، 113 ، 17-29. [ Google Scholar ] [ CrossRef ]
- Baltsavias, EP مقایسه بین فتوگرامتری و اسکن لیزری. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 83-94. [ Google Scholar ] [ CrossRef ]
- هاجسون، من؛ برسناهان، ص. دقت ارتفاع ناشی از LiDAR در هوا: ارزیابی تجربی و بودجه خطا. فتوگرام مهندس Remote Sens. 2004 , 70 , 331-339. [ Google Scholar ] [ CrossRef ]
- دنگ، ی. ویلسون، جی پی؛ وابستگی های تفکیک بائر، BO DEM ویژگی های زمین در سراسر یک چشم انداز. بین المللی جی. جئوگر. Inf. علمی 2007 ، 21 ، 187-213. [ Google Scholar ] [ CrossRef ]
- رویتر، HI; هنگل، تی. گسلر، پی. Soille, P. آماده سازی DEMs برای تجزیه و تحلیل ژئومورفومتریک ; Elsevier Ltd.: آمستردام، هلند، 2009; جلد 33. [ Google Scholar ]
- تیان، بی. وانگ، ال. Koike، K. آمار فضایی تغییر زبری سطح به دست آمده از مدل های ارتفاعی دیجیتال چند مقیاسی. در Procedia Environmental Sciences ; الزویر: آمستردام، هلند، 2011; جلد 7، ص 252-257. [ Google Scholar ]
- یانگ، پی. ایمز، DP; فونسکا، آ. اندرسون، دی. شرستا، ر. گلن، NF; Cao, Y. تأثیر وضوح DEM مشتق از LiDAR بر نتایج مدل حوضه آبخیز در مقیاس بزرگ چیست؟ محیط زیست مدل. نرم افزار 2014 ، 58 ، 48-57. [ Google Scholar ] [ CrossRef ]
- لیندسی، جی بی. فرانسیونی، ا. Cockburn، JMH LiDAR DEM صاف کردن و حفظ ویژگی های زهکشی. Remote Sens. 2019 ، 11 ، 1926. [ Google Scholar ] [ CrossRef ]
- لوهانی، ب. Mason, DC کاربرد ارتفاع سنجی لیزری اسکن هوابرد برای مطالعه ژئومورفولوژی کانال جزر و مدی. ISPRS J. Photogramm. Remote Sens. 2001 ، 56 ، 100-120. [ Google Scholar ] [ CrossRef ]
- راسر، نیوجرسی؛ Petley، DN; لیم، م. دانینگ، SA; اسکن لیزری زمینی آلیسون، RJ برای نظارت بر فرآیند فرسایش صخرههای ساحلی سنگ سخت. مهندس QJ جئول هیدروژئول. 2005 ، 38 ، 363-375. [ Google Scholar ] [ CrossRef ]
- Heritage، GL; Hetherington، D. به سوی یک پروتکل برای اسکن لیزری در ژئومورفولوژی رودخانه. گشت و گذار در زمین. روند. Landforms 2007 , 32 , 66-74. [ Google Scholar ] [ CrossRef ]
- وهر، آ. لور، اسکن لیزری هوابرد – مقدمه و مروری. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 68-82. [ Google Scholar ] [ CrossRef ]
- ونتورا، جی. ویلاردو، جی. ترانووا، سی. Sessa، EB ردیابی و تکامل زمین لغزش های فعال پیچیده توسط داده های هوابرد چند زمانی LiDAR: لغزش Montaguto (جنوب ایتالیا). سنسور از راه دور محیط. 2011 ، 115 ، 3237-3248. [ Google Scholar ] [ CrossRef ]
- داهنه، ع. کورسینی، A. سینماتیک جریانهای زمینی فعال که با همبستگی تصویر دیجیتال و تکنیکهای تفریق DEM اعمال شده برای دادههای چند زمانی LiDAR نشان داده شد. گشت و گذار در زمین. روند. Landforms 2013 , 38 , 640-654. [ Google Scholar ] [ CrossRef ]
- میتاسووا، اچ. اورتون، ام. هارمون، RS تجزیه و تحلیل جغرافیایی یک تپه شنی ساحلی تکامل میدان: Jockey’s Ridge، کارولینای شمالی. ژئومورفولوژی 2005 ، 72 ، 204-221. [ Google Scholar ] [ CrossRef ]
- جوان، AP; اولسن، ام جی. دریسکول، ن. فلیک، RE; گوتیرز، آر. گوزا، RT; جانستون، ای. Kuester، F. مقایسه برآوردهای LiDAR هوابرد و زمینی فرسایش صخرههای دریا در جنوب کالیفرنیا. فتوگرام مهندس Remote Sens. 2010 , 76 , 421-427. [ Google Scholar ]
- برمر، ام. Sass, O. ترکیب اسکن لیزری هوابرد و زمینی برای تعیین کمیت فرسایش و رسوب توسط یک رویداد جریان زباله. ژئومورفولوژی 2012 ، 138 ، 49-60. [ Google Scholar ] [ CrossRef ]
- باگمن، کالیفرنیا؛ جونز، بی.ام. Bodony، KL; مان، دی اچ. لارسن، سی اف. هیملستوس، ای. اسمیت، جی. سنجش از دور مورفومتریک و دینامیک یک میدان تپه ای منطقه سرد با استفاده از عکس های هوایی تاریخی و داده های LiDAR موجود در هوا. Remote Sens. 2018 , 10 , 792. [ Google Scholar ] [ CrossRef ]
- وستوبی، ام جی. براسینگتون، جی. گلسر، NF; هامبری، ام جی; رینولدز، JM فتوگرامتری “ساختار از حرکت”: ابزاری کم هزینه و موثر برای کاربردهای علوم زمین. ژئومورفولوژی 2012 ، 179 ، 300-314. [ Google Scholar ] [ CrossRef ]
- مودری، وی. گدولووا، ک. فوگل، م. کلاپستی، پ. شهری، ر. کومارک، جی. مودرا، ال. استرونر، ام. بارتاک، وی. سولسکی، ام. مقایسه تصاویر پهپاد ترکیبی برگ و برگ روی و LiDAR هوابرد برای ارزیابی زمین و ساختار پوشش گیاهی سایت پس از معدن: چشماندازهایی برای نظارت بر خطرات و موفقیت بازسازی. Appl. Geogr. 2019 ، 104 ، 32-41. [ Google Scholar ] [ CrossRef ]
- Lowe, DG ویژگی های تصویر متمایز از نقاط کلیدی تغییرناپذیر مقیاس. بین المللی جی. کامپیوتر. Vis. 2004 ، 60 ، 91-110. [ Google Scholar ] [ CrossRef ]
- نیتامر، U. جیمز، MR; روتموند، اس. تراولتی، جی. Joswig، M. سنجش از دور زمین لغزش Super-Sauze مبتنی بر پهپاد: ارزیابی و نتایج. مهندس جئول 2012 ، 128 ، 2-11. [ Google Scholar ] [ CrossRef ]
- هرووئت، آ. دانفورد، آر. پی گی، اچ. بلتی، بی. ترملو، ام.-ال. تجزیه و تحلیل الگوهای استخدام پس از سیل در رودخانه های کانال بافته شده در مقیاس های چندگانه بر اساس یک سری تصویر جمع آوری شده توسط وسایل نقلیه هوایی بدون سرنشین، وسایل نقلیه هوایی فوق سبک و ماهواره ها. GIScience Remote Sens. 2011 ، 48 ، 50-73. [ Google Scholar ] [ CrossRef ]
- دیاکاکیس، م. آندریاداکیس، ای. نیکولوپولوس، EI; اسپیرو، NI; گوگو، من؛ دلیگیاناکیس، جی. کاتسیادو، NK; آنتونیادیس، ز. ملاکی، م. جورجاکوپولوس، آ. و همکاران یک رویکرد یکپارچه از مشاهدات زمینی و هوایی در تحقیقات بلایای سیل ناگهانی مورد سیل ناگهانی ماندرا در سال 2017 در یونان. بین المللی J. کاهش خطر بلایا. 2019 ، 33 ، 290-309. [ Google Scholar ] [ CrossRef ]
- آندریاداکیس، ای. دیاکاکیس، م. واسیلاکیس، ای. دلیگیاناکیس، جی. آنتونیادیس، ا. آندریوپولوس، پ. اسپیرو، NI; نیکولوپولوس، تخمین دبی اوج پس از سیل به کمک سیستمهای هوایی بدون سرنشین EI در جریانهای زودگذر. Remote Sens. 2020 , 12 , 4183. [ Google Scholar ] [ CrossRef ]
- Tamminga، AD; Eaton، BC; سنجش از راه دور تغییرات رودخانه ای بر اساس Hugenholtz، CH UAS پس از یک رویداد سیل شدید. گشت و گذار در زمین. روند. Landforms 2015 ، 40 ، 1464-1476. [ Google Scholar ] [ CrossRef ]
- میرجوفسکی، جی. Langhammer، J. نظارت چندزمانی مورفودینامیک یک جریان میان کوه با استفاده از فتوگرامتری UAS. Remote Sens. 2015 ، 7 ، 8586–8609. [ Google Scholar ] [ CrossRef ]
- مارتو، بی. وریکات، دی. گیبنز، سی. Batalla، RJ; گرین، DR کاربرد فتوگرامتری ساختار-از حرکت در بازسازی رودخانه. فرآیندهای سطح زمین و شکل های زمین ; John Wiley and Sons Ltd.: Chichester، UK، 2017; جلد 42، ص 503–515. [ Google Scholar ]
- Cook, KL ارزیابی اثربخشی پهپادهای ارزان قیمت و ساختار از حرکت برای تشخیص تغییرات ژئومورفیک. ژئومورفولوژی 2017 ، 278 ، 195-208. [ Google Scholar ] [ CrossRef ]
- لانگهامر، جی. لندزیوچ، تی. میرجوفسکی، جی. Hartvich, F. گرانولومتری نوری مبتنی بر پهپاد به عنوان ابزاری برای تشخیص تغییرات در ساختار رسوبات سیل. Remote Sens. 2017 , 9 , 240. [ Google Scholar ] [ CrossRef ]
- وودجت، ع. Austrums، R. اندازه گیری اندازه شن زیر هوایی با استفاده از داده های توپوگرافی به دست آمده از یک رویکرد UAV-SfM. گشت و گذار در زمین. روند. Landforms 2017 ، 42 ، 1434-1443. [ Google Scholar ] [ CrossRef ]
- ملمبو، آر. وودهاوس، آی اچ. جرارد، اف. اندرسون، ک. ساختار از حرکت (SfM) فتوگرامتری با داده های هواپیماهای بدون سرنشین: روشی کم هزینه برای نظارت بر انتشار گازهای گلخانه ای از جنگل ها در کشورهای در حال توسعه. Forests 2017 , 8 , 68. [ Google Scholar ] [ CrossRef ]
- سانکی، تی. دوناجر، ج. مک وی، جی. Sankey، JB UAV LiDAR و همجوشی فراطیفی برای نظارت بر جنگل در جنوب غربی ایالات متحده. سنسور از راه دور محیط. 2017 ، 195 ، 30-43. [ Google Scholar ] [ CrossRef ]
- متئوس، آر.ام. آزانون، جی.ام. رولدان، اف جی. نوتی، دی. پرز-پنا، وی. Galve، JP; پرز-گارسیا، جی.ال. Colomo، CM; گومز-لوپز، جی.ام. مونتسرات، او. و همکاران استفاده ترکیبی از تکنیکهای فتوگرامتری PSINSAR و پهپاد برای تجزیه و تحلیل سینماتیک زمین لغزش ساحلی که یک منطقه شهری (SE اسپانیا) را تحت تأثیر قرار میدهد. زمین لغزش 2017 ، 14 ، 743-754. [ Google Scholar ] [ CrossRef ]
- لوسییر، آ. ترنر، دی. پادشاه، DH; رابینسون، SA استفاده از یک وسیله نقلیه هوایی بدون سرنشین (UAV) برای تصویربرداری میکروتوپوگرافی از بسترهای خزه قطب جنوب. بین المللی J. Appl. Obs زمین. Geoinf. 2014 ، 27 ، 53-62. [ Google Scholar ] [ CrossRef ]
- Dandois، JP; الیس، EC سنجش از دور ساختار پوشش گیاهی با استفاده از بینایی کامپیوتری. Remote Sens. 2010 , 2 , 1157–1176. [ Google Scholar ] [ CrossRef ]
- آناستوپولوس، آی. Kanaris، I. Psachna-Pilion Geological Map، مقیاس 1:50.000، Pilion Sheet، HSGME 1962. [ Google Scholar ]
- کاتسیکاتسوس، جی. کوکیس، جی. Fytikas، M. Psachna-Pilion Geological Map، مقیاس 1:50.000، Pilion Sheet، HSGME 1968. [ Google Scholar ]
- Keeley، JE شدت آتش، شدت آتش سوزی و شدت سوختگی: بررسی مختصر و استفاده پیشنهادی. بین المللی جی. وایلدل. آتش 2009 ، 18 ، 116-126. [ Google Scholar ] [ CrossRef ]
- چن، ایکس. Vogelmann، JE; رولینز، ام. اوهلن، دی. کلید، CH; یانگ، ال. هوانگ، سی. Shi، H. تشخیص شدت سوختگی پس از آتش سوزی و بازیابی پوشش گیاهی با استفاده از شاخص های طیفی سنجش از دور چندزمانی و داده های شاخص سوختگی ترکیبی جمع آوری شده در یک جنگل کاج پوندروسا. بین المللی J. Remote Sens. 2011 ، 32 ، 7905-7927. [ Google Scholar ] [ CrossRef ]
- ایرلند، جی. پتروپولوس، GP بررسی روابط بین پویایی بازسازی پوشش گیاهی پس از آتش سوزی، توپوگرافی و شدت سوختگی: مطالعه موردی از مناطق بوم گردی Montane Cordillera در غرب کانادا. Appl. Geogr. 2015 ، 56 ، 232-248. [ Google Scholar ] [ CrossRef ]
- مالینس، جی. میتسوپولوس، آی. کریسفی، اول. ارزیابی و مقایسه شاخصهای طیفی سنتینل 2A و تصویرگر زمین عملیاتی landsat-8 (OLI) برای تخمین شدت آتشسوزی در اکوسیستم کاج مدیترانهای یونان. GIScience Remote Sens. 2018 ، 55 ، 1-18. [ Google Scholar ] [ CrossRef ]
- روز، SS; Gran، KB; بلمونت، پی. Wawrzyniec, T. اندازه گیری فرسایش بلوف قسمت 1: روش های اسکن لیزری زمینی برای تشخیص تغییر. گشت و گذار در زمین. روند. Landforms 2013 , 38 , 1055-1067. [ Google Scholar ] [ CrossRef ]
- Girardeau-Montaut، D.; مارک، آر. Bey, A. Documentation CloudCompare Version 2.1.eng. در دسترس آنلاین: https://www.danielgm.net/cc/doc/qCC/Documentation_CloudCompare_version_2_1_eng.pdf (دسترسی در 10 اکتبر 2020).
- ژانگ، دبلیو. چی، جی. وان، پی. وانگ، اچ. زی، دی. وانگ، ایکس. Yan, G. یک روش آسان برای استفاده هوابرد LiDAR فیلتر کردن داده ها بر اساس شبیه سازی پارچه. Remote Sens. 2016 , 8 , 501. [ Google Scholar ] [ CrossRef ]
- لاگ، دی. برودو، ن. Leroux, J. مقایسه دقیق سه بعدی توپوگرافی پیچیده با اسکنر لیزری زمینی: کاربرد در دره Rangitikei (NZ). ISPRS J. Photogramm. Remote Sens. 2013 ، 82 ، 10-26. [ Google Scholar ] [ CrossRef ]
- لاگوواردوس، ک. کوترونی، وی. بزز، آ. کولتسیس، آی. کوپنیا، تی. لیکودیس، اس. مازاراکیس، ن. پاپاگیانکی، ک. Vougioukas, S. ایستگاه های هواشناسی خودکار شبکه NOANN رصدخانه ملی آتن: عملیات و پایگاه داده. Geosci. داده J. 2017 ، 4 ، 4-16. [ Google Scholar ] [ CrossRef ]
- ترنر، دی. لوسییر، آ. Watson, C. یک تکنیک خودکار برای تولید موزاییک های ژئوریکتیفیک شده از تصاویر وسایل نقلیه هوایی بدون سرنشین (UAV) با وضوح فوق العاده بالا، بر اساس ابرهای نقطه ای ساختار از حرکت (SFM). Remote Sens. 2012 ، 4 ، 1392-1410. [ Google Scholar ] [ CrossRef ]
- اندرو، ر. Cahyono، BK; ریاضى، ج. ایستارنو; جورجانی; رمضان، GR; Tuntas, S. ترکیبی از LiDAR زمینی و فتوگرامتری UAV برای تجسم تعاملی میراث معماری با استفاده از موتور بازی Unity 3D. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی ISPRS Arch. 2019 ، 42 ، 39-44. [ Google Scholar ] [ CrossRef ]
- مونسرات، او. Crosetto، M. اندازهگیری تغییر شکل با استفاده از دادههای اسکن لیزری زمینی و تطبیق سطح سه بعدی حداقل مربعات. ISPRS J. Photogramm. Remote Sens. 2008 , 63 , 142-154. [ Google Scholar ] [ CrossRef ]
- استامف، ا. Malet، JP; المانند، پ. پیروت-دسیلینی، ام. Skupinski، G. فتوگرامتری چند نمای زمینی برای پایش تغییر شکل زمین لغزش و فرسایش. ژئومورفولوژی 2015 ، 231 ، 130-145. [ Google Scholar ] [ CrossRef ]
- کوالسکی، ا. وجس، جی. Kasza، D. نظارت بر فعالیت زمین لغزش های انسانی با پهپادهای ترکیبی و دم های مشتق از LiDAR – مطالعه موردی زمین لغزش czerwony wąwóz (SW لهستان، sudetes غربی). Acta Geodyn. ژئومتر. 2018 ، 15 ، 117-129. [ Google Scholar ] [ CrossRef ]
- کائو، ال. لیو، اچ. فو، ایکس. ژانگ، ز. شن، ایکس. Ruan, H. مقایسه UAV LiDAR و ابرهای نقطه ای فتوگرامتری هوایی دیجیتال برای تخمین ویژگی های ساختاری جنگل در جنگل های نیمه گرمسیری کاشته شده. Forests 2019 , 10 , 145. [ Google Scholar ] [ CrossRef ]
- Kociuba، W. مسیرهای مختلف برای توسعه داده های LiDAR زمینی برای تجزیه و تحلیل مقایسه ای تغییرات سطح توپوگرافی. Appl. علمی 2020 ، 10 ، 7409. [ Google Scholar ] [ CrossRef ]
- همشاو، SD; انگل، تی. Rizzo، DM; اونیل دان، جی. Dewoolkar، MM کاربرد سیستم هواپیمای بدون سرنشین (UAS) برای نظارت بر فرسایش سواحل در امتداد کریدورهای رودخانه. ژئومات. نات. خطر خطرات 2019 ، 10 ، 1285-1305. [ Google Scholar ] [ CrossRef ]
- D’Oleire-Oltmanns، S. مارزولف، آی. پیتر، KD; ریس، هواپیمای بدون سرنشین JB (UAV) برای نظارت بر فرسایش خاک در مراکش. Remote Sens. 2012 , 4 , 3390–3416. [ Google Scholar ] [ CrossRef ]
- هاروین، اس. Lucieer، A. ارزیابی دقت ابرهای نقطه جغرافیایی مرجع تولید شده از طریق چند نمای استریوپسیس از تصاویر وسایل نقلیه هوایی بدون سرنشین (UAV). Remote Sens. 2012 ، 4 ، 1573-1599. [ Google Scholar ] [ CrossRef ]
- هوله، جی. Höhle, M. ارزیابی دقت مدلهای ارتفاعی دیجیتال با استفاده از روشهای آماری قوی. ISPRS J. Photogramm. Remote Sens. 2009 , 64 , 398-406. [ Google Scholar ] [ CrossRef ]
- Nesbit، PR; Hugenholtz، CH افزایش دقت مدل سه بعدی پهپاد-SfM در مناظر برجسته با ترکیب تصاویر مایل. Remote Sens. 2019 , 11 , 239. [ Google Scholar ] [ CrossRef ]
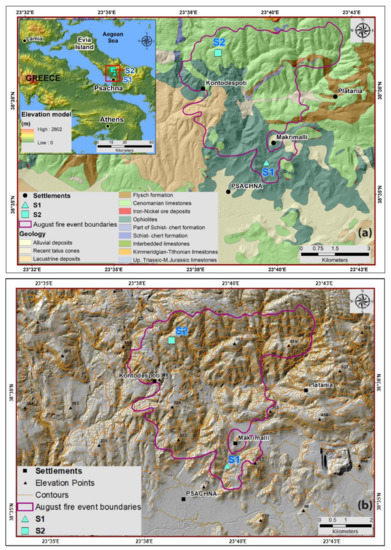
شکل 1. ( الف ) نقشه زمین شناسی منطقه مورد مطالعه شامل مکان های مکان های S1 و S2 در مرکز اویا، یونان (مقیاس 1:50000 [ 55 ، 56 ]. مرزهای رویداد آتش سوزی ارائه شده توسط EFFIS). S2 در بالای نهشته های کواترنر قرار دارد که در این مقیاس قابل مشاهده نیستند. ( ب ) نقشه توپوگرافی منطقه سوخته و دو منطقه تحقیقاتی را نشان می دهد.
شکل 2. نقشه شدت سوختگی، پس از آتشسوزیهای اوت 2019 در مرکز اویا (پردازش شده با موتور Google Earth). مرزهای منطقه سوخته توسط EFFIS ارائه شده است.
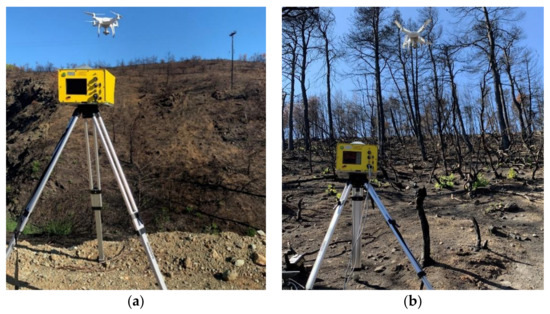
شکل 3. تجهیزات پهپاد و LiDAR مورد استفاده در حین کار میدانی، S1 ( a )، S2 ( b ).
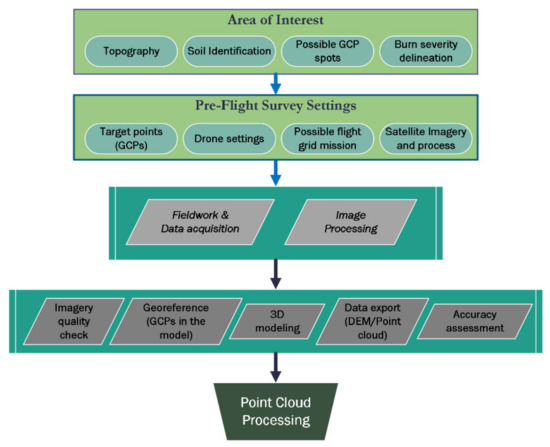
شکل 4. گردش کار بررسی کامل.
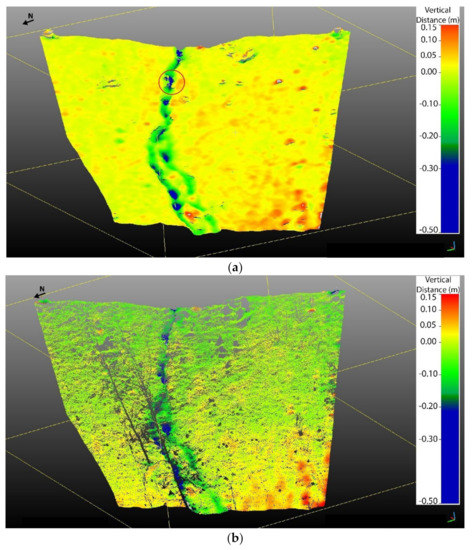
شکل 6. کل فرسایش سالانه S1 (m) از ( a ) UAV و ( b ) داده های مشتق شده از TLS.
شکل 7. ابر نقطه تفاوت S1 M3C2 (m) پهپاد ( a ) و داده های مشتق شده از TLS ( b ) در تجزیه و تحلیل 4 ماهه (19 اکتبر 2019 تا 23 فوریه 2020).
شکل 8. ابر نقطه تفاوت S2 M3C2 (m) پهپاد ( a ) و داده های مشتق شده از TLS ( b ) در تجزیه و تحلیل 4 ماهه (19 اکتبر 2019 تا 23 فوریه 2020).
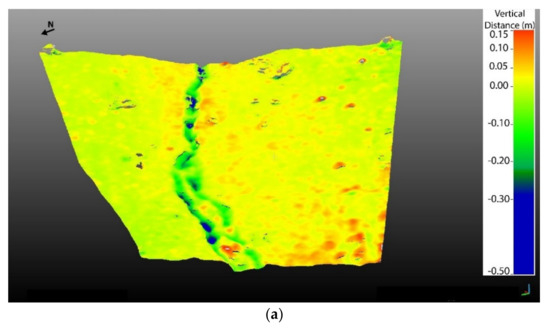
شکل 9. ابر نقطه تفاوت S1 M3C2 (m) پهپاد ( a ) و داده های مشتق شده از TLS ( b ) در تجزیه و تحلیل 8 ماهه (23 فوریه 2020 تا 11 اکتبر 2020).
شکل 10. مکان GCP در S1 ( a ) و S2 ( b ).


26 نظرات