

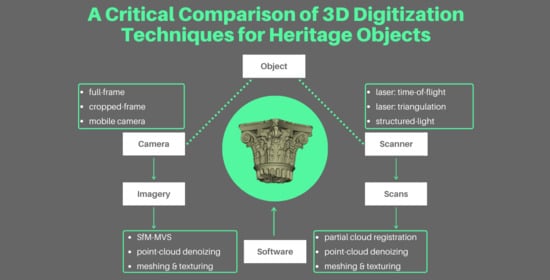
تکنیکهای دیجیتالیسازی سه بعدی میراث ملموس، در رابطه با حسگرهای فعال و غیرفعال، رویکردهای اکتساب داده، الگوریتمهای پیادهسازیشده و سیستمهای محاسباتی بهکار گرفته شده، بهطور مداوم بهروزرسانی میشوند. این پیشرفتها اتوماسیون و سرعت پردازش بالاتر، افزایش دقت و دقت برای دیجیتالی کردن داراییهای میراث را ممکن میسازد. برای کاربردهای در مقیاس بزرگ، مانند تحقیقات بر روی بقایای باستانی، اشیاء میراثی، یا جزئیات معماری، روشهای اسکن و مدلسازی مبتنی بر تصویر به دلیل کاهش هزینهها و مدت زمان پردازش، اکتساب سریع و تکرارپذیری جریانهای کاری، غالب شدهاند. این مقاله یک مقایسه متریک به روز شده از رویکردهای دیجیتالی مشترک میراث را ارائه می دهد، که بررسی کاملی از حسگرها، گرفتن گردش کار، پارامترهای پردازش درگیر ارائه می دهد. نتایج متریک و رادیومتریک تولید شده است. انواع نرم افزارهای فتوگرامتری (هم تجاری و هم منبع باز) و همچنین تجهیزات عکس برداری با ویژگی ها و قیمت های مختلف و اسکنرهایی با استفاده از فناوری های مختلف مورد ارزیابی قرار گرفتند. آزمایشها بر روی مطالعات موردی ویژگیهای هندسی و سطحی مختلف برای ارزیابی کامل خطوط لوله مدلسازی سهبعدی اجرا شده انجام شد.
کلید واژه ها:
ژئوماتیک ; سنسورها ؛ مدل سازی سه بعدی ؛ ساختار از حرکت ; اسکن لیزری ؛ اسکن نور ساختار یافته ؛ میراث فرهنگی
چکیده گرافیکی
1. مقدمه
اهمیتی که جامعه علمی به مستندسازی اشیاء میراثی نسبت می دهد، به طور علّی با نیازهای حفاظت، حفاظت و ارزش گذاری مرتبط است. مطابق با ادبیات بینالمللی، برخی از حوزههای کاربردی آن عبارتند از: حفاظت، مرمت دیجیتال، آرشیو دیجیتال، واقعیت افزوده یا مجازی، چاپ سهبعدی کپیها، مستندسازی زمان واقعی کاوشهای باستانشناسی، و نظارت [ 1 ].
مطالعات موردی میراث مرتبط با دیجیتالی سازی و تجسم دقیق، مانند بررسی اشیاء کاربردی، تزئینی و آیینی، جزئیات معماری تاریخی، نقاشی ها، نقاشی های دیواری، هنر صخره ای، حکاکی ها، و مستندات باستان شناسی در محل اشیاء تکه تکه شده، نیازمند مدل های سه بعدی با وفاداری بصری بالا هستند. و دقت [ 2]. پیشرفت مستمر در حسگرهای فعال و غیرفعال جدید برای ضبط واقعیت، تکنیکهای اکتساب داده، الگوریتمهای پردازش، سیستمهای محاسباتی و علاوه بر این بهروزرسانیهای مداوم در سختافزار و نرمافزار موجود برای بازسازی هندسههای پیچیده، عامل مهمی است که وضوح بالا را ایجاد میکند. ثبت، پردازش و تجسم دادههای میراث جزئی امکانپذیرتر است. این پیشرفت ها اتوماسیون بیشتر، سرعت های بالاتر، افزایش دقت و دقت را ممکن کرده است. به ویژه، پیشرفت در ابزارهای جدید و ابزارهای دیجیتال، مانند اسکنرهای دستی و نرم افزارهای فتوگرامتری خودکار یا نیمه خودکار، راه حل های قدرتمند دیجیتالی سازی سه بعدی را برای متخصصان و کاربران بی تجربه ارائه می دهد [ 3 ، 4 ، 5 ،6 ].
مدلسازی سه بعدی میراث دقیق و با وضوح بالا با حسگرهای غیرفعال و فعال مختلف با هدف بازسازی دقیق ویژگیهای سطح مورد بررسی قرار گرفته است. اسکن لیزری مبتنی بر مثلث [ 7 ]، اسکن نور ساختار یافته [ 8 ]، مدلسازی با دوربینهای تصویربرداری برد (RGB-D) [ 9 ] و مدلسازی فتوگرامتری مبتنی بر تصویر [ 10 ، 11 ، 12 ] برخی از تکنیکهای مورد بررسی را تشکیل میدهند. دیجیتالی سازی سه بعدی اشیاء میراثی اگرچه اسکن مثلثی، اسکن نور ساختاریافته، و سیستمهای مدلسازی مبتنی بر تصویر که الگوریتمهای ساختار از حرکت (SfM) و استریو چند نمای (MVS) را پیادهسازی میکنند [ 13 ]] برای کاربردهای میراث در مقیاس بزرگ غالب شده اند، عمدتاً به دلیل ترکیب: هزینه های کمتر، جمع آوری و پردازش سریعتر داده ها، دقت بالا و توانایی گرفتن بافت با وضوح بالا [ 8 ، 14 ، 15 ، 16 ]. بسیاری از گردشهای کاری معاصر بیش از یک تکنیک را برای بهینهسازی نتایج دیجیتال سه بعدی ترکیب میکنند [ 17 ، 18 ]. مزایای ترکیب SfM-MVS همچنین برای مطالعات موردی پیچیده، مانند مصنوعات کم ویژگی یا بدون ویژگی [ 19 ، 20 ]، و مدلسازی متریک از تصاویر طیف فراتر از مرئی [ 21 ] مشهود است.
ارزیابی های متریک در مورد اشیاء میراثی توسط Remondino و همکاران انجام شده است. [ 22 ]، نبیل و صالح [ 23 ]، گالیزیا و همکاران. [ 24 ]، بیانکونی و همکاران. [ 25 ] برای نرم افزار SfM، توسط Evgenikou و Georgopoulos [ 26 ] و Menna و همکاران. [ 27 ] در مورد اسکن در مقابل رویکردهای نرم افزار فتوگرامتری SfM و توسط Kersten و همکاران. [ 28 ، 29 ] و مورنا و همکاران. [ 30] برای اسکنرهای قابل حمل/دستی. علاوه بر این، با توجه به پیشرفتهای قابل توجه اخیر در فناوری دوربین تلفن همراه، با توجه به کیفیت سنسورها و عملکرد نرمافزار دوربین، دوربینهای گوشیهای هوشمند برای پسبافت مدلها از حسگرهای فعال و برای مدلسازی متریک مستقیم مبتنی بر تصویر از اشیاء میراثی ارزیابی شدهاند. 31 ، 32 ، 33]. علیرغم ارزیابیهای مکرر در مورد تکنیکهای دیجیتالیسازی فوقالذکر که در کتابشناسی یافت میشوند، به دلیل پیشرفتهای سریع فناوری به سرعت منسوخ میشوند. علاوه بر این، با توجه به اینکه مستندسازی تولیدی داراییهای میراث نه تنها به معنای دیجیتالی شدن است، بلکه توانایی برقراری ارتباط مؤثر نتایج آن با کارشناسان میراث و عموم مردم را نیز دارد، مقایسههای متریک تکنیکهای دیجیتالسازی باید بهطور منظم بهروزرسانی شوند. این ارزیابیها نه تنها باید به دنبال ارزیابی هزینه و اثربخشی زمان باشند، بلکه باید نتایج و فرادادههای مرتبط با میراث را بهطور کامل تعریف کنند، به طوری که محدودیتهای استفاده از آنها برای انتشار نیز به خوبی تعریف شود.
مدلسازی میراث متریک شامل سه عامل است: شی (اندازه، هندسه، ویژگیهای سطح، مواد)، جمعآوری داده (حسگرها، شرایط، تکنیکهای مرجع/مقیاسسازی، و گردش کار)، و پردازش (سختافزار، نرمافزار، الگوریتمها، خروجیها). برای انجام ارزیابیهای متریک برای هر تکنیک دیجیتالسازی سه بعدی، دو پارامتر از این سه پارامتر باید ثابت بمانند. در این زمینه، پژوهش ارائه شده با ثابت نگه داشتن بسیاری از پارامترهای اساسی رویههای اکتساب دادهها و با تغییر حالت غیرفعال، مقایسهای جامع بر روی جریانهای کاری مختلف فتوگرامتری و اسکن مبتنی بر SfM برای دیجیتالی کردن اشیاء میراثی با اندازه کوچک ارائه میکند. یا سنسورهای فعال استفاده شده یا نرم افزارهای درگیر در رویکردهای مدل سازی مبتنی بر تصویر پیاده سازی شده است. علاوه بر این،
بنابراین، در بخش دوم این مقاله، یک مقایسه کامل بین پیادهسازیهای مختلف نرمافزار فتوگرامتری تجاری و رایگان بر اساس رویکرد مدلسازی مبتنی بر تصویر SfM برای مجموعه دادههای تصویری جمعآوریشده با سه دوربین با ویژگیهای مختلف انجام شد. بخش سوم آزمایش های انجام شده با لیزرهای فازی مختلف و اسکنرهای قابل حمل نور ساختاریافته را تشریح می کند. بخش چهارم به ارزیابی های بیشتر بر روی مش های نهایی و بخش پنجم به مقایسه بین مش های تولید شده توسط اسکن و مدل سازی سه بعدی مبتنی بر تصویر اشاره دارد. بخش آخر به ارائه چند نکته پایانی و اهداف تحقیق برای بررسی بیشتر اختصاص دارد.
علاوه بر این، باید تاکید کرد که در تحقیق ارائه شده، اهمیت قابل توجهی نه تنها به مقایسه متریک و ارزیابی بصری نتایج بازسازی سه بعدی، بلکه به قیمت سنسورها و نرمافزارها و مدت زمان گردشهای کاری پردازش داده میشود. از آنجایی که آنها عواملی حیاتی برای انتخاب ابزار دقیق و نرم افزار برای مدل سازی میراث هستند، به ویژه در موارد دیجیتالی سازی درجا ، انبوه یا سریع.
اشیاء آزمون برای این مطالعه (ارائه شده در شکل 1 ) عبارت بودند از:
-
یک کپی از مجسمه مرمری نوع دوم اسپیدوس اولیه سیکلادیک، ابعاد: 4 سانتی متر × 4 سانتی متر × 16 سانتی متر.
-
ماکت سر ستون رومی، ابعاد: 45 سانتی متر × 45 سانتی متر × 45 سانتی متر;
-
مجسمه نیم تنه فرانسیس جوزف اول اتریشی از Accademia Carrara di Bergamo (استان برگامو، لمباردی، ایتالیا)، ابعاد: 40 سانتی متر × 50 سانتی متر × 90 سانتی متر. و
-
مجسمه سنگی مذهبی کوچک قرن نوزدهمی مسیح مصلوب شده از Castello di Casotto (استان کونئو، پیمونت، ایتالیا)، ابعاد: 31 سانتی متر × 22 سانتی متر × 5 سانتی متر.
2. مدل سازی سه بعدی مبتنی بر تصویر
2.1. اکتساب داده ها
ابزار مورد استفاده برای مجموعه تصاویر (مشخصات در جدول 1 ) شامل یک دوربین فول فریم Canon EOS 5DS R با یک لنز رفلکس دیجیتال تک لنز (DSLR) با لنز Canon EF 24-105 mm f/4L IS USM (4800 USD) است. )، دوربین Canon EOS 1200D DSLR (سنسور تصویر APS-C) با لنز Canon EF-S 18–55 mm f/3.5–5.6 IS II (380 USD) و گوشی هوشمند Huawei P30 (485 USD) با 5.6 میلی متر (27) معادل میلی متر) دوربین لنز f/1.7 (سنسور سونی IMX 650 Exmor RS؛ اپتیک لایکا).
تصاویر برای کپی مجسمه و مجسمه کوچک با استفاده از یک صفحه گردان به دست آمد. اهداف مصنوعی در اطراف اجسام قرار داده شد تا صحنه ها را مقیاس بندی کنند. یک سه پایه برای تثبیت دوربین ها به منظور جلوگیری از میکرو تاری استفاده شد. با توجه به مطالعات موردی ابعاد بزرگتر، تصاویر به صورت مایل با همپوشانی های بزرگ به دست آمدند. یک نوار مقیاس اینوار نیز در صحنه برای مقیاس بندی عکس گرفته شد. علیرغم رزولوشنهای متفاوت حسگرهای تصویربرداری، سعی شد تا فاصلههای نمونهبرداری شی مشابه با در نظر گرفتن فاصله از جسم و فواصل کانونی موجود برای به دست آوردن دادههای قابل مقایسه حفظ شود. عمق میدان (DoF) در طول اکتساب محاسبه شد، زیرا وضوح نیز در نظر گرفته شد. ویژگی های مجموعه داده ها در جدول 2 خلاصه شده است. دو مجموعه داده آخر فقط قسمت بالایی مجسمه کوچک را به تصویر می کشد.
2.2. نرم افزار پردازش و پارامترها
راهحلهای نرمافزار فتوگرامتری مورد استفاده برای مدلسازی مبتنی بر تصویر رویکرد SfM-MVS شامل موارد زیر است:
-
Agisoft Metashape Professional 1.5.1 (3499 USD);
-
3DFlow Zephyr Aerial 4519 (4329 USD) [ 34 ];
-
Pix4Dmodel 4.5.3 (49 دلار در ماه)؛
-
Autodesk ReCap Photo 19.3.1.4 (مبتنی بر وب؛ ReCap Pro 54 دلار در ماه)؛
-
Regard3D 1.0.0. (رایگان و منبع باز) که از الگوریتم تطبیق K-GRraph استفاده می کند و محیط Multi-View [ 35 ] را برای بازسازی صحنه متراکم پیاده سازی می کند.
-
خط لوله ای که VisualSFM [ 36 ، 37 ] را ترکیب می کند – یک باندلر مبتنی بر GPU برای SfM، CMVS [ 38 ] برای بازسازی صحنه متراکم MVS، و MeshLab برای بازسازی سطح Poisson Screened [ 39 ] و بافت رنگ مش [4 ] .
راه حل های پردازش مبتنی بر تصویر در اینجا به ترتیب با اختصارات AMP، FZA، P4D، ARP، R3D و VCM نامیده می شوند. برای پردازش فتوگرامتری مجموعه دادهها، از یک لپتاپ سفارشیسازی شده با پردازنده 6 هستهای Intel i7-8750H با فرکانس 2.2 گیگاهرتز (حداکثر 4.1 گیگاهرتز)، 32 گیگابایت رم و NVIDIA GeForce RTX 2070 GPU استفاده شد.
برای ارزیابی موثر عملکرد نرمافزار پیادهسازیشده و اثرات استفاده از حسگرهای تصویربرداری مختلف، پارامترهای مشابه، در صورت امکان، برای تمام گردشهای کار مدلسازی مبتنی بر تصویر، همانطور که در جدول 3 خلاصه شدهاند، انتخاب شدند . روشهای دیجیتالی نیمه خودکار استاندارد در همه موارد اجرا شد، با بازسازی یک ابر پراکنده، سپس متراکم کردن آن پس از تخمین نقشههای عمق، ایجاد یک شبکه با استفاده از الگوریتمهای مثلثسازی، و در نهایت بافتدهی مش تولید شده با ارتوفوتو تطبیقپذیر. نزدیک می شود. هیچ حذف دستی نویز انجام نشد، به غیر از حذف صحنه و سایر اجزای غیر متصل به شی، انتخاب شده بر اساس اندازه مؤلفه.
در مورد الگوریتمهای پیادهسازیشده، باید تاکید کرد که نرمافزار رایگان VisualSFM از تشخیص و توصیف مبتنی بر تبدیل ویژگی تغییر ناپذیر مقیاس (SIFT) [ 41 ] استفاده میکند، در حالی که Regard3D از A-KAZE [ 42 ] و الگوهای ترتیب شدت محلی (LIOP) استفاده میکند. این هدف [ 43 ]; در مقابل، 3DFlow Zephyr از یک آشکارساز تغییر یافته تفاوت گاوسی (DoG) استفاده می کند. علاوه بر این، Metashape و Zephyr هر دو تنظیمات بسته نرم افزاری را انجام می دهند، اما VisualSFM و R3D SfM افزایشی را پیاده سازی می کنند. علاوه بر این، در حالی که همه نرم افزارهای دیگر از بازسازی سطح پواسون برای تولید مش مثلثی استفاده می کردند، در FZA، یک رویکرد الگوریتمی حفظ لبه برای مقایسه نتایج انتخاب شد.
پوشاندن پسزمینه روی تصاویر در تمامی نرمافزارهای تجاری انجام میشود و مانع از ARP میشود که به کاربر اجازه دخالت در هیچ مرحله پردازشی را نمیدهد. در P4D، استفاده از حاشیه نویسی ها تنها پس از بازسازی کامل صحنه اولیه انجام می شود، اگر تصاویر به درستی تراز شوند، به این معنی که برای مطالعه موردی پایتخت، 1:03:56 اضافی برای مجموعه داده EOS 5DS R و یک مقدار اضافی مورد نیاز است. 0:37:41 برای مجموعه داده EOS 1200D، برای اولین بازسازی ابر متراکم و مش بافت، علاوه بر آنچه در زیر در نتایج گزارش شده است ( بخش 4 ) مورد نیاز بود.
ابرهای نقطه متراکم ناشی از خطوط لوله بازسازی رایگان – که در آن هیچ گزینه ای برای پوشاندن مناطق ناخواسته از تصاویر وجود نداشت – به طور خودکار با استفاده از حذف آماری Outlier (SOR) برای حذف موثر نویز قبل از تولید مش تمیز شدند. حداکثر عمق هشت درخت 13، درونیابی سطحی محدود، و محدودیتهای خاص برای تعداد وجههای مثلثی در آن راهحلهایی انتخاب شد که امکان سفارشیسازی پارامترها را برای مرحله تولید مش سهبعدی فراهم میکرد. بافت مش بدون ایجاد تعادل رنگ یا نوردهی تصاویر، و بدون میانگین مقادیر از چندین تصویر، ایجاد بافت فایل تک تصویری انجام شد.
2.3. نتایج
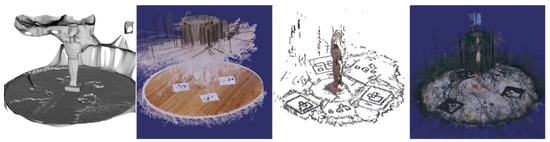
برای مطالعه موردی شکل، فقط AMP و FZA توانستند صحنه را به طور کامل از مجموعه دادههای 1 (EOS 5DS R)، 2 (EOS 1200D) و 3 (Exmor RS IMX650) بازسازی کنند. FZA به زمان پردازش قابل توجهی بیشتری نیاز داشت و نتایج به طور کلی کمتر را تولید میکرد. خطاهای مشابهی در بازپرداخت مجدد مشاهده شد. P4D در بازسازی شی از هیچ مجموعه داده ای موفق نبود و نتایج ARP شامل بازسازی های جزئی با نویز و سطوح ساختگی بود ( شکل 2).). خط لوله VCM به طور کامل صحنه را از مجموعه داده 1 بازسازی کرد (شکل، EOS 5DS R)، اما مقدار کمی نویز پس از مثلثسازی باقی ماند که بر روی مش نهایی تأثیر گذاشت و نتایج بافتدهی مشکلساز بود. علاوه بر این، خط لوله VCM قادر به بازسازی شی از مجموعه داده 2 (شکل، EOS 1200D) نبود و منجر به ایجاد یک ابر نقطه ناقص با نویز زیاد برای مجموعه داده 3 شد (شکل، Exmor RS IMX650؛ شکل 2 را ببینید ). R3D منجر به ابرهای نقطهای متراکم شد که درصد زیادی از نویز را برای مجموعه داده 1 (تجسم، EOS 5DS R) و 3 (تجسم، Exmor RS IMX650؛ شکل 2 را ببینید ) شامل میشد که حذف خودکار (یا دستی) امکانپذیر نبود. بنابراین برای ساخت مش های سه بعدی بیشتر مورد بهره برداری قرار نگرفتند. نتایج حاصل از پردازش فتوگرامتری SfM–MVS در فهرست شده استجدول 4 .
برای مطالعه موردی سرمایه، همه راه حل های نرم افزاری می توانند به طور کامل صحنه را به درستی بازسازی کنند ( جدول 5 ). زمان پردازش بین هر نرم افزار تجاری قابل مقایسه بود. P4D متراکم ترین نتایج ابر پراکنده را تولید کرد و AMP متراکم ترین نتایج ابر نقطه متراکم را ایجاد کرد. قابل ذکر است، پارامترهای کالیبراسیون خودکار دوربین، استخراج شده از نرم افزار تجاری، با تغییر فرمت قابل تعویض بودند.
به طور مشابه، از مجموعه داده 6 بهطور اریب بهدستآمده (bust؛ EOS 1200D) شی با تمام راهحلهای فتوگرامتری بازسازی شد. با این حال، ARP ظاهراً چند سطح دوتایی ایجاد کرد و سطوح مختلف سطح جسم را نادرست تراز کرد. زمان پردازش بین نرم افزار رایگان و AMP قابل مقایسه بود در حالی که FZA به زمان قابل توجهی بیشتری برای پردازش مجموعه داده در این مورد نیاز داشت. مش های ایجاد شده با نرم افزار منبع باز دارای حفره هایی در قسمت های پایین و بالایی بودند. R3D یک ابر نقطه بسیار متراکم ایجاد کرد، اما تعداد نقاط تکراری زیادی وجود داشت که منجر به یک مش با وضوح پایین شد ( جدول 6 ). نتایج بافت مشابه بود.
شیء موجود در مجموعه داده 7 (مجسمه کوچک، EOS 1200D، f = 18 میلیمتر) به طور کامل با استفاده از AMP دیجیتالی شد، در حالی که FZA نتایج پراکندهتری تولید کرد، زیرا علیرغم زمان پردازش بسیار طولانیتر مورد نیاز، همه تصاویر صحنه جهتدار نبودند. هر نرم افزار نتایج متراکمی را از مجموعه داده 8 (مجسمه کوچک، EOS 1200D، f = 55 میلی متر) تولید کرد که به طور کامل صحنه را بازسازی کرد. AMP متراکم ترین ابر نقطه سه بعدی را با کمترین خطای بازسازی ایجاد کرد و FZA به بیشترین زمان برای پردازش نیاز داشت. از مجموعه داده 9 (مجسمه کوچک، Exmor RS IMX650)، ما توانستیم صحنه کامل را تنها با استفاده از VisualSFM بازیابی کنیم. هر دو ARP و FZA مدل های جزئی تولید کردند ( شکل 3)، در حالی که AMP یک سطح بسیار پر سر و صدا تولید کرد. Regard3D نتوانست هیچ مشی را از مجموعه داده های 7-9 ایجاد کند. نتایج حاصل از پردازش فتوگرامتری SfM–MVS این مجموعه داده ها در جدول 7 فهرست شده است.
3. اسکن
3.1. اکتساب داده ها
برای جلسات اسکن اشیاء، یک FARO Focus3D X 330 به همراه دو اسکنر نوری ساختار نزدیک مادون قرمز دستی قابل حمل استفاده شد: FARO Freestyle3D، و STONEX F6 SR، که اخیراً برای دیجیتالی کردن اشیاء میراثی ارزیابی شدهاند [ 44 ، 45 ]. ویژگی های ابزار اسکن در جدول 8 خلاصه شده است.
اسکنها در شرایط نوری همگن در الگوهای دایرهای انجام شد و برای پوشش کامل هندسه اشیاء و حذف انسداد تا حد امکان برنامهریزی شد. فواصل اسکن تقریباً 0.4-1 متر بود که با توجه به مشخصات سازنده برای همه اسکنرها، به تراکم ابر نقطه وضوح 0.2-0.4 میلی متر ترجمه می شود. مطالعه موردی ماکت بزرگ مستلزم هشت اسکن جداگانه برای ثبت کامل سطح سه بعدی جسم با Focus3D X 330 و برای اطمینان از ثبت تمام اسکنهای جزئی در یک صحنه بود.
3.2. در حال پردازش
دستکاری ابر نقاط اسکن شده با نرم افزار ارائه شده یا پیشنهاد شده توسط سازندگان انجام شد. ثبت، حذف نویز و حذف با Autodesk ReCap Pro 5.0.4.17 برای اسکنهای خام از اسکنرهای FARO و با Mantis Vision Echo 2.3.1 برای اسکنهای خام از اسکنر STONEX انجام شد. مش بندی سه بعدی در MeshLab با پارامترهای مشابهی که برای ابرهای نقطه فتوگرامتری استفاده می شود، انجام شد.
3.3. نتایج
برای مطالعه موردی کپی فیگور، هیچ مدلی ساخته نشد، زیرا اسکنر Focus 3D X 330 نتایجی با چگالی کافی ارائه نمیدهد و اسکنرهای دستی باعث میشوند که ابرهای نقطهای به درستی ثبت نشده باشند، با مقادیر زیادی نویز که به صورت دستی هم قابل حذف نیستند. یا به صورت خودکار برای مطالعه موردی ماکت بزرگ، FARO Focus 3D X 330 و SF6 SR نتایج متراکمی را ایجاد کردند، با برخی از سوراخها در مورد اول به دلیل انسداد. Freestyle 3D یک ابر بسیار پر سر و صدا و پراکنده تولید کرد. این نتایج اسکن به تفصیل در جدول 9 فهرست شده است. مدل های مبتنی بر اسکن نیز برای نیم تنه سنگی پس از ادغام هشت مدل سطحی با همپوشانی جزئی که با F6 SR (14 میلیون امتیاز) و برای یک طرف مجسمه کوچک (383 هزار امتیاز) گرفته شده بودند، تولید شدند. تمام دیجیتالی سازی های دیگر با اسکن انجام نشد، زیرا صحنه های نیمه اسکن شده را نمی توان ثبت کرد.
4. ارزیابی نتایج
ارزیابی کیفیت مشهای تولید شده، کامل بودن، حفظ جزئیات سطح، نویز، ناهمواری و همچنین وفاداری بصری بافت را برای مدلهای فتوگرامتری در نظر گرفت. مدل های اسکنر هیچ نویز قابل مشاهده ای نداشتند. با این حال، سطح تولید شده با F6 SR بیش از حد ساده شده بود، و ثابت کرد که Mantis Echo Vision برخی از جزئیات سطح را حذف کرده است، علیرغم انتخاب مقادیر کم برای فیلتر نویز. فاصله ها زیر 2 میلی متر بود ( شکل 4 ).
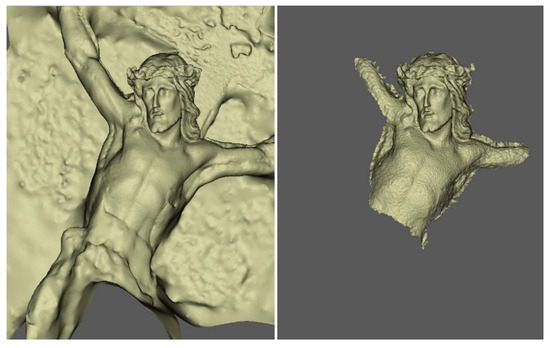
برای مجموعه داده های فتوگرامتری 1، 2 و 3، AMP و FZA نتایج بسیار منسجمی از جزئیات و زبری مشابه تولید کردند. مدل های تولید شده از مجموعه داده 1 (EOS 5DS R، کپی مجسمه) کیفیت بافت بسیار بالایی داشتند ( شکل 5 ). مدلهای مجموعه داده 3 (Exmor RS IMS 650، کپی شکل) حاوی مقداری نویز بودند ( شکل 6 ). فواصل مطلق محاسبه شده بین همه مدلها برای آن مجموعه دادهها کوچکتر از 0.5 میلیمتر (یک انحراف استاندارد)، که تقریباً 0.3 درصد اندازه اشیا است، با میانگین فاصله کمتر از 0.3 میلیمتر بود ( جدول 10 ).
برای مجموعه داده 4 (مثل بزرگ، EOS 5DS R)، مدلهای AMP و VCM حفرههای بیشتری داشتند. مدلهای P4D و ARP روانتر بودند. مدل های دیگر حاوی مقدار کمی نویز در سطوح صاف تر بودند و به نظر می رسید P4D جزئیات سطح را بیش از حد ساده می کند. علاوه بر این، مدلهای نرمافزار آزاد مقدار کمی نویز باقی مانده در لبهها داشتند ( شکل 7 ). همه نرم افزارهای تجاری بافت های مشابهی تولید می کردند. فواصل مطلق محاسبه شده بین مدل های فتوگرامتری برای مجموعه داده 4 کوچکتر از 1.5 میلی متر (یک انحراف استاندارد)، تقریباً 0.4٪ از ابعاد اجسام بود، به جز مدل P4D، که برای آن فاصله محاسبه شده تا سایر مدل ها بزرگتر از 2 بود. میلی متر (یک انحراف استاندارد)، همانطور که در جدول 11 نشان داده شده است. نقشه برداری از تفاوت های هندسی نیز در شکل 8 ارائه شده است. با توجه به مجموعه داده 5 (کپی بزرگ، EOS 1200D)، همه مدلها حاوی مقداری نویز سطحی بودند که از سطوح پایین تا متوسط متغیر بود، با خط لوله VCM که منجر به سطح بالاتری از حفظ جزئیات سطح و سطوح زبری پایینتر شد. مش های P4D و R3D پر سر و صداترین بودند ( شکل 9 ). به طور کلی، کیفیت بافت بین نرم افزار تجاری مشابه اما بهتر از کیفیت تولید شده توسط خطوط لوله بازسازی رایگان بود ( شکل 10 ). فواصل مطلق محاسبه شده بین مدل های فتوگرامتری (رأس مش نهایی) برای مجموعه داده 5 کوچکتر از 2.5 میلی متر بود (یک انحراف استاندارد – σ، تقریباً 0.6٪ از ابعاد اشیا، به جز مدل P4D که مقادیر بالاتری در آن مشاهده شد ( جدول 12 ).
در رابطه با مجموعه داده 6 (سینه سنگی، EOS 1200D)، مشهای تولید شده توسط FZA، ARP و VCM، مشبکهایی شبیهتر به مش اسکنشده و بین آنها از نظر جزئیات سطح و زبری سطح بودند ( شکل 11 و شکل 12 ). با این حال، همانطور که در بالا ذکر شد، مش ARP دارای سطوح تکراری بود و مش تولید شده توسط FZA دارای چند سوراخ در بالای سر بود که در آن همپوشانی کوچکتری بین تصاویر وجود داشت. مش تولید شده توسط AMP نیز مشابه مش اسکن شده در سطوح صاف تر بود، اما در لبه ها و چین های پارچه، مقدار قابل توجهی نویز باقی می ماند. بافتها تنها به دلیل ناهنجاریهای سطحی کوچک موجود در مشهای مبتنی بر وب و نرمافزار منبع باز مشابه و متمایز بودند. تفاوت سطح محاسبه شده در ارائه شده استشکل 13 . تفاوت بین مدل تولید شده توسط AMP و مدل های دیگر کوچکترین بود ( جدول 13 )، در حالی که تفاوت بین مدل های AMP-FZA کمتر از 1.4 میلی متر (1 σ ) بود.
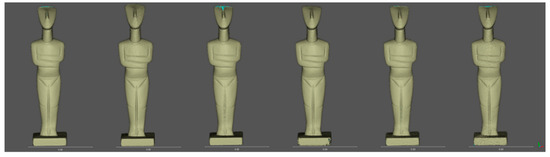
تنها مش کاملاً بازسازیشده برای مجموعه داده 7 از AMP دارای ویژگیهای سطح صافشده بود. تمام مدل های بازسازی شده از مجموعه داده 8 ویژگی های مشابهی داشتند ( شکل 14 ). برخی از سطوح دوتایی را می توان دوباره روی سطح تولید شده با ARP مشاهده کرد. با کمال تعجب، سطح تولید شده با ویژگیهای سطحی بهتر حفظ شده، سطحی بود که از مجموعه داده 9 (مجسمه کوچک، Exmor RS IMX650) با خط لولهای که VisualSFM، CMVS و MeshLab را پیادهسازی میکرد، تولید شد ( شکل 15 ). تفاوت مشاهده شده بین مش های تولید شده از مجموعه داده 7 زیر 1 میلی متر (1 σ ) بود، در حالی که تفاوت بین مدل های مجموعه داده 8 زیر 0.7 میلی متر (1 σ ) بود.) که هر دو با توجه به اینکه وضوح این مجموعه داده ها به ترتیب 0.09 و 0.02 میلی متر بود قابل توجه است. به طور قابل توجهی انحراف سطح بین مجموعه داده 9 مدل VisualSFM و مدل Metashape با وضوح بالا از مجموعه داده 8 زیر 0.5 میلی متر (1 σ ) بود. برخی از فواصل اندازه گیری شده در جدول 14 ارائه شده است.
5. مقایسه های متریک بیشتر
برای مطالعه موردی ماکت بزرگ، ارزیابیهای هندسی بیشتری را میتوان انجام داد، مشهای اسکن را که به عنوان حقیقت زمین فرض میشوند، با مدلهای فتوگرامتری مقایسه کرد. محاسبه فواصل پس از ثبت دقیق با نزدیکترین نقطه تکراری (ICP) با استفاده از ابزار فاصله ابر به ابر بر روی رئوس مش های نهایی، در Cloud Compare انجام شد. فاصله Hausdorff بین شبکه های اسکن و فتوگرامتری زیر 3 میلی متر (یک انحراف استاندارد) برای مجموعه داده 4، به جز مدل P4D، و زیر 3.5 میلی متر (یک انحراف استاندارد) برای مجموعه داده 5، به جز مدل R3D، که شامل یک بزرگی نویز نتایج به تفصیل در جدول 15 و جدول 16 ارائه شده است. تفاوت های اصلی بین مدل های تولید شده با تکنیک های فتوگرامتری و اسکن در قسمت هایی از ماکت بزرگ مشاهده شد که به دلیل هندسه پیچیده آن مسدود شده بود.
برای نیم تنه سنگی، ارزیابیهای هندسی بیشتری نیز میتوان انجام داد و سطوح تولید شده با فتوگرامتری را با مدل اسکن شده مقایسه کرد. دقت هایی که به عنوان حقیقت پایه مدل F6 SR اسکن شده را در نظر می گیرند در جدول 17 ارائه شده و با شکل 16 نشان داده شده است. مدلهای AMP و FZA از نظر متری دقیقتر بودند، با توجه به اینکه سطوح زیر 1.3 میلیمتر (1 σ ) از مدل حقیقت زمین منحرف شدهاند، که تنها 3 ‰ از کوچکترین بعد جسم را نشان میدهد. میانگین فواصل و انحراف معیار آنها برای مدل های تولید شده از نرم افزارهای غیرتجاری در حدود 1 میلی متر بود.
6. بحث و نتیجه گیری
تحقیق ارائهشده مقایسهای انتخابی بر روی راهحلهای مدلسازی مبتنی بر تصویر SfM و MVS با هزینههای مختلف و روی اسکنرهای قابل حمل برای دیجیتالی کردن اشیاء میراث کوچک انجام داد. همانطور که انتظار میرفت، چالشهایی از ماهیت متفاوت اشیاء میراثی به وجود میآیند که هندسه، ویژگیهای سطح و بافت نقش مهمی در تصمیمگیری برای گردشهای کاری اکتساب و پردازش دارند.
نتایج فتوگرامتری تحت تأثیر نوع سنسور دوربین، فاصله نمونه برداری و پوشش جسم در فضای تصویر قرار می گیرد. برای مطالعات موردی پیچیده، بدون ویژگی یا بسیار کوچک، به نظر میرسد که تنها راهحلهای تجاری گرانقیمت قادر به بازسازی کامل صحنه فتوگرامتری هستند و ثابت میکنند که شاید راهحلهای مقرونبهصرفهتر برای صحنههای ایستا یا زمانی که پسزمینه همگن و همگن است مناسبتر باشند. رنگ بسیار متفاوتی نسبت به شیء دارد، به طوری که می توان آن را به عنوان پس زمینه توسط نرم افزار مورد استفاده تشخیص داد.
برای بازسازی فتوگرامتری از مجموعه دادههای ماکت بزرگ و مجسمه نیم تنه سنگی، تقریباً همه جریانهای کاری نتایج مشابهی را ایجاد کردند. برخی از مشکلات نویز که رخ داده اند را می توان به تصاویر مایل نسبت داد، و بنابراین می توان با به دست آوردن مجموعه داده های تصویری صلب، متراکم و سازگار با نور آنها را برطرف کرد.
اگرچه ثابت شد که AMP، FZA و ARP راهحلهای کارآمدتر هستند، اما باید بیان کرد که ARP هیچ پارامتر قابل تنظیم و محدودیت ۱۰۰ تصویر در هر پروژه را ارائه میکند، که یک مشکل مهم برای برنامههای دیجیتالی کردن میراث واقعی است. علاوه بر این، AMP تنها چند پارامتر قابل تنظیم را ارائه می دهد، بدون اینکه جزئیاتی در مورد رویکردهای الگوریتمی مورد استفاده قرار گیرد. از سوی دیگر، FZA اجازه می دهد تا هر پارامتر در جریان کار بازسازی دیجیتال قابل تنظیم باشد و علیرغم گزینه های پیش فرض که منجر به نتایج پر سر و صدا می شود – نسبت به FZA – یک متخصص می تواند نحوه بهینه سازی اجرای آن را برای اهداف میراثی شناسایی کند. اجرای یک الگوریتم مش بندی حفظ لبه، که درون یابی ابر نقطه متراکم را در 3DFlow Zephyr نیز محدود می کند، به ویژه اجازه می دهد تا سطوح با کیفیت بالا تولید شود و جزئیات مشابه اسکنرهای دستی حفظ شود. P4D، به عنوان یک نرم افزار عمدتاً به سمت برنامه های کاربردی در مقیاس کوچکتر و هندسه های مسطح تر، نتایج کافی ارائه نمی دهد. مشکل اصلی راه حل های رایگان، نویز سطح (به دلیل شرایط گرفتن) بود که به راحتی نمی توان آن را پس از تولید فیلتر کرد.
انسدادهای ناشی از هندسههای پیچیده با روشهای مبتنی بر تصویر برطرف میشوند، اما سایر سطوح مشکلساز ممکن است به ترکیبهای مختلفی از تکنیکهای مستندسازی نیاز داشته باشند. بافت های تولید شده از روش های اسکن کیفیت مناسبی نداشتند و بنابراین مش های تولید شده به این روش باید با روش های دیگر بافت شوند، از ثبت تصویر به مش ساده، ثبت نام مشترک با مدل های فتوگرامتری و ادغام حسگرها. برای جمع آوری داده های متعدد تفاوت بین نتایج Focus3D X 330 و Stonex F6 SR را می توان به این واقعیت نسبت داد که اولین مورد عمدتاً به سمت اسناد معماری و سایر کاربردهای ساخت و ساز است.
استفاده از دوربین تلفن همراه برای مقاصد فتوگرامتری نیز امیدوارکننده به نظر میرسید که بر ویژگیهای متریک نتایج تأثیری نداشت، اما تأثیر قابلتوجهی بر سطوح نویز تولیدی داشت. با این حال، علیرغم وضوح و کیفیت بالای سنسور دوربین موبایل استفاده شده، نتایج بافت کیفیت کمتری نسبت به بافتهای تولید شده از مجموعه دادههای دوربین DSLR با وضوح بالا داشت. بنابراین، برای ارزیابی ظرفیت رادیومتری دوربینهای تلفنهای هوشمند برای بافتبندی با وفاداری بالا مدلهای میراث، باید آزمایشهای بیشتری در این راستا انجام شود. برای نتیجه گیری، ترکیب دوربین گوشی های هوشمند و راه حل های مبتنی بر وب، پتانسیل هیجان انگیزی را برای برنامه هایی که کیفیت متریک دغدغه اصلی آنها نیست، مانند ضبط سریع، انتشار برای آموزش، فراهم می کند.
منابع
- پیراکسینی، ام. گوئیدی، جی. آتزنی، سی. دیجیتالی کردن سه بعدی میراث فرهنگی. J. Cult. میراث. 2001 ، 2 ، 63-70. [ Google Scholar ] [ CrossRef ]
- آداموپولوس، ای. Rinaudo، F. مقایسه به روز شده در رویکردهای معاصر برای دیجیتالی کردن اشیاء میراث. در مجموعه مقالات کنفرانس بین المللی IMEKO TC-4 2019 در مترولوژی برای باستان شناسی و میراث فرهنگی (2019 MetroArchaeo)، فلورانس، ایتالیا، 4 تا 6 دسامبر 2019؛ کاتلانی، ام.، داپونته، پی.، ویرایش. IMEKO: فلورانس، ایتالیا، 2019؛ صص 1-6. در دسترس آنلاین: https://www.imeko.org/publications/tc4-Archaeo-2019/IMEKO-TC4-METROARCHAEO-2019-1.pdf (دسترسی در 11 نوامبر 2020).
- جورجوپولوس، آ. Stathopoulou، EK داده ها برای ضبط هندسی سه بعدی: وضعیت هنر و نوآوری های اخیر. در میراث و باستان شناسی در عصر دیجیتال ; Vincent, ML, López-Menchero Bendicho, VM, Ioannides, M., Levy, TE, Eds. انتشارات بین المللی اسپرینگر: چم، سوئیس، 2017; صص 1-26. شابک 978-3-319-65369-3. [ Google Scholar ]
- حسنی، ف. اسناد میراث فرهنگی; تکنیک ها، پتانسیل ها و محدودیت ها بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، XL-5/W7 ، 207–214. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آگوستو، ای. آردیسون، پی. برناز، ل. داگو، اف. مستندات سه بعدی میراث فرهنگی: طراحی و بهره برداری از بررسی های متریک سه بعدی. در کاربرد فن آوری های نوآورانه در علم میراث ; پاولیدیس، جی.، ویرایش. پیشرفت در مطالعات مذهبی و فرهنگی؛ IGI Global: Hershey، PA، ایالات متحده آمریکا، 2020؛ صص 1-15. شابک 978-1-79982-871-6. [ Google Scholar ]
- موسوی، و. خسروی، م. احمدی، م. نوری، ن. حق شناس، س. حسینیاوه، ع. وارشوساز، م. ارزیابی عملکرد نرم افزار بازسازی سه بعدی چند تصویری با سنسورهای مختلف. اندازه گیری 2018 ، 120 ، 1-10. [ Google Scholar ] [ CrossRef ]
- آرباس، ال. سونینو، ای. کالیری، م. دلپیان، م. فابری، م. یاکارینو ایدلسون، ای. Scopigno, R. استفاده های نوآورانه از فناوری های دیجیتال سه بعدی برای کمک به بازسازی مجسمه تکه تکه شده سفالی. J. Cult. میراث. 2013 ، 14 ، 332-345. [ Google Scholar ] [ CrossRef ]
- مک فرون، اس پی; گرنات، تی. هابلین، جی.-جی. اسکن نوری ساختاریافته برای مستندسازی با وضوح بالا از یافتههای باستانشناسی درجا. J. Archaeol. علمی 2009 ، 36 ، 19-24. [ Google Scholar ] [ CrossRef ]
- لاچات، ای. ماچر، اچ. لندز، تی. گرسن مایر، پی. ارزیابی دقت مدلهای سهبعدی بهدستآمده با دوربین DSLR و Kinect v2. در SPIE جلد 9528، Videometrics، Range Imaging، and Applications XIII، مجموعه مقالات رویداد اندازه گیری نوری SPIE، مونیخ، آلمان، 21-25 ژوئن 2015 . Remondino, F., Shortis, MR, Eds. SPIE: Bellingham, WA, USA, 2015; صفحات 95280G-1–95280G-14. [ Google Scholar ]
- آکرمن، جی. Goesele, M. A Survey of Photometric Stereo Techniques. کامپیوتر FNT نمودار. Vis. 2015 ، 9 ، 149-254. [ Google Scholar ] [ CrossRef ]
- Remondino، F. ثبت میراث و مدلسازی سه بعدی با فتوگرامتری و اسکن سه بعدی. Remote Sens. 2011 ، 3 ، 1104-1138. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوئیدی، جی. Micoli، LL; گونیزی، اس. برنان، ام. Frischer, B. تصویربرداری سه بعدی از مصنوعات میراث فرهنگی یک مطالعه تجربی در مورد کیفیت داده های سه بعدی. در مجموعه مقالات میراث دیجیتال 2015، گرانادا، اسپانیا، 28 سپتامبر تا 2 اکتبر 2015. IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2015؛ صص 321-324. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- میچلتی، ن. چندلر، جی اچ. ساختار خط، SN از فتوگرامتری حرکتی (SfM). در تکنیک های ژئومورفولوژی ; Cook, SJ, Clarke, LE, Nield, JM, Eds. انجمن بریتانیایی برای ژئومورفولوژی: لندن، بریتانیا، 2015; فصل 2، بخش 2.2. [ Google Scholar ]
- گراسیانو، آ. اورتگا، ال. Segura، RJ; Feito، FR دیجیتال سازی مصنوعات مذهبی با اسکنر نور ساختاریافته. باستانی مجازی Rev. 2017 , 8 , 49. [ Google Scholar ] [ CrossRef ]
- موریتا، م. Bilmes, G. کاربردهای تکنیک های تصویربرداری سه بعدی کم هزینه برای مستندسازی اشیاء میراثی. انتخاب کنید پورا Apl. 2018 ، 51 ، 50026:1–50026:11. [ Google Scholar ] [ CrossRef ]
- Sapirstein، P. یک سیستم ضبط فتوگرامتری با دقت بالا برای مصنوعات کوچک. J. Cult. میراث. 2018 ، 31 ، 33-45. [ Google Scholar ] [ CrossRef ]
- یوآنیدیس، سی. پینیوتیس، جی. سوئیل، اس. بورکسیس، اف. بوتسی، ع.-م. چلیورو، آر. Tsakiri، M. لیزر و سیستمهای مهندسی معکوس چند تصویری برای مدلسازی سهبعدی دقیق مصنوعات فرهنگی پیچیده. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، XLII-2/W11 ، 623–629. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سرنا، سی جی; پیلای، آر. Trémeau، A. ادغام داده های اشیاء با استفاده از تکنیک هایی مانند اسکن لیزری، نور ساختار یافته و فتوگرامتری برای کاربردهای میراث فرهنگی. در تصویربرداری رنگی محاسباتی ; Trémeau, A., Schettini, R., Tominaga, S., Eds. انتشارات بین المللی Springer: چم، سوئیس، 2015; جلد 9016، ص 208–224. شابک 978-3-319-15978-2. [ Google Scholar ]
- کوتسودیس، ع. ویدمار، بی. Arnaoutoglou, F. Performance Evaluation of a Multi-Image Reconstruction 3D Software on a Low Feature Artefact. J. Archaeol. علمی 2013 ، 40 ، 4450-4456. [ Google Scholar ] [ CrossRef ]
- نیکولای، سی. نوچرینو، ای. منا، اف. Remondino، F. فتوگرامتری به کار رفته در مصنوعات مشکل ساز. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2014 ، XL–5 ، 451–456. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آداموپولوس، ای. بوورو، آ. Rinaudo، F. مدلسازی میراث متریک مبتنی بر تصویر در طیف فروسرخ نزدیک. میراث. علمی 2020 ، 8 ، 53. [ Google Scholar ] [ CrossRef ]
- رموندینو، اف. اسپرا، ام جی; نوچرینو، ای. منا، اف. Nex، F. وضعیت هنر در تطبیق تصویر با چگالی بالا. فتوگرام. ضبط 2014 ، 29 ، 144-166. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نبیل، م. صالح، F. بازسازی سه بعدی از تصاویر برای مصنوعات موزه: یک مطالعه تطبیقی. در مجموعه مقالات کنفرانس بین المللی 2014 در سیستم های مجازی و چند رسانه ای (VSMM)، هنگ کنگ، چین، 9 تا 12 دسامبر 2014. IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2014؛ صص 257-260. [ Google Scholar ]
- گالیزیا، م. اینزریلو، ال. سانتاگاتی، سی. میراث و فناوری: رویکردهای جدید به اسناد سه بعدی و ارتباطات میراث معماری. در مجموعه مقالات مجمع بین المللی Le Vie dei Mercanti سیزدهم، کاپری، ایتالیا، 11-13 ژوئن 2015; صص 686-695. [ Google Scholar ]
- بیانکونی، اف. کاتالوچی، اس. فیلیپوچی، م. مارسیلی، ر. مورتی، ام. روسی، جی. Speranzini، E. مقایسه بین دو تکنیک غیر تماسی برای دیجیتالی کردن هنر. J. Phys. Conf. سر. 2017 , 882 , 012005. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اوگنیکو، وی. Georgopoulos, A. بررسی روشهای بازسازی سه بعدی برای مصنوعات کوچک. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، XL-5/W4 ، 101–108. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- منا، اف. نوچرینو، ای. رموندینو، اف. دلپیان، م. کالیری، م. Scopigno، R. دیجیتالی سازی سه بعدی یک شاهکار میراث – تحلیل انتقادی در ارزیابی کیفیت. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، XLI-B5 ، 675–683. [ Google Scholar ] [ CrossRef ]
- کرستن توماس، پ. پرزیبیلا، H.-J. Lindstaedt, M. بررسیهای دقت هندسی سیستمهای اسکن سه بعدی دستی. فتوگرام فرنرکوند. Geoinf. 2016 ، 2016 ، 271-283. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Kersten، TP; لیندستادت، ام. استاروستا، دی. بررسی های مقایسه ای دقت هندسی سیستم های اسکن سه بعدی دستی – یک به روز رسانی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، XLII-2 ، 487–494. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مورنا، اس. باربا، س. Álvaro-Tordesillas، A. Shining 3D EinScan-Pro، کاربرد و اعتبارسنجی در زمینه میراث فرهنگی، از موزه Chillida-Leku تا موزه باستانشناسی Sarno. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، XLII-2/W18 ، 135–142. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سانتاگاتی، سی. لو تورکو، ام. Bocconcino، MM; دوناتو، وی. Galizia, M. مدل های سه بعدی برای همه: دستیابی کم هزینه از طریق دستگاه های تلفن همراه در مقایسه با تکنیک های مبتنی بر تصویر. پتانسیل ها و ضعف ها در حوزه میراث فرهنگی بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، XLII-2/W8 ، 221–228. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Boboc، RG; جیرباسیا، اف. Postelnicu، CC; Gîrbacia، T. ارزیابی استفاده از دستگاه های موبایل برای بازسازی سه بعدی آثار میراث فرهنگی. در فن آوری های واقعیت مجازی در میراث فرهنگی ; Duguleană, M., Carrozzino, M., Gams, M., Tanea, I., Eds. انتشارات بین المللی Springer: چم، سوئیس، 2019; جلد 904، ص 46-59. شابک 978-3-030-05818-0. [ Google Scholar ]
- گایانی، م. آپولونیو، فی. Fantini، F. ارزیابی صحت رنگ و دقت متریک گوشی های هوشمند برای مستندسازی سه بعدی مصنوعات کوچک. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، XLII-2/W11 ، 539–547. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- قراردی، ر. فرنزنا، م. Fusiello, A. بهبود کارایی ساختار و حرکت سلسله مراتبی. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2010 در مورد دید رایانه و تشخیص الگو، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 13 تا 18 ژوئن 2010. IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2010؛ صفحات 1594-1600. [ Google Scholar ]
- فورمن، اس. لانگگوث، اف. موئرل، ن. Waechter، M. Goesele, M. MVE – یک محیط بازسازی مبتنی بر تصویر. محاسبه کنید. نمودار. 2015 ، 53 ، 44-53. [ Google Scholar ] [ CrossRef ]
- Wu, C. به سمت ساختار افزایشی زمان خطی از حرکت. در مجموعه مقالات کنفرانس بین المللی 2013 در 3D Vision (3DV 2013)، سیاتل، WA، ایالات متحده آمریکا، 29 ژوئن تا 1 ژوئیه 2013; انجمن کامپیوتر IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2013; صص 127-136. [ Google Scholar ]
- وو، سی. آگاروال، اس. کورلس، بی. تنظیم بسته نرم افزاری چند هسته ای Seitz، SM. در مجموعه مقالات CVPR 2011، پراویدنس، RI، ایالات متحده آمریکا، 20-25 ژوئن 2011; صص 3057–3064. [ Google Scholar ]
- فوروکاوا، ی. کورلس، بی. Seitz، SM; Szeliski، R. به سوی استریو چند نمایشی در مقیاس اینترنت. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2010 در مورد دید رایانه و تشخیص الگو، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 13 تا 18 ژوئن 2010. IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2010؛ ص 1434-1441. [ Google Scholar ]
- کژدان، م. Hoppe, H. بازسازی سطح پواسون غربال شده. ACM Trans. نمودار. 2013 ، 32 ، 1-13. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کالیری، م. رانزوگلیا، جی. دلپیان، م. Cignoni، P. Scopigno، R. Meshlab به عنوان یک ابزار باز کامل برای ادغام عکس ها و رنگ ها با داده های هندسی سه بعدی با وضوح بالا. در مجموعه مقالات کنفرانس فصل ایتالیایی یوروگرافیک 2008، سالرنو، ایتالیا، 2 تا 4 ژوئیه 2008; صص 129-136. [ Google Scholar ]
- Wu, C. SiftGPU: پیادهسازی GPU برای تبدیل ویژگی ثابت مقیاس (SIFT). 2007. در دسترس آنلاین: https://www.cs.unc.edu/~ccwu/siftgpu/lowesift (در 29 ژانویه 2013 قابل دسترسی است).
- آلکانتریلا، پ. نووو، جی. بارتولی، الف. انتشار سریع آشکار برای ویژگیهای شتابدار در فضاهای مقیاس غیرخطی. در مجموعه مقالات کنفرانس بینایی ماشین بریتانیا 2013، بریستول، انگلستان، 9 تا 13 سپتامبر 2013. انجمن بینایی ماشین بریتانیا: بریستول، انگلستان، 2013; صفحات 13.1-13.11. [ Google Scholar ]
- وانگ، ز. فن، بی. Wu, F. الگوی ترتیب شدت محلی برای توصیف ویژگی. در مجموعه مقالات کنفرانس بین المللی 2011 بینایی کامپیوتر، بارسلون، اسپانیا، 6 تا 13 نوامبر 2011. IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2011؛ صص 603-610. [ Google Scholar ]
- دی لوکا، دی. دل جودیس، ام. گراسو، ن. ماترون، اف. اوسلو، ا. پیراس، ام. اسکنر حجمی دستی برای ادغام های چاپ شده سه بعدی عناصر تاریخی: مقایسه ها و نتایج. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، XLII-2/W15 ، 381–388. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پاتروکو، جی. رینادو، اف. Spreafico، A. یک اسکنر دستی جدید برای بررسی سه بعدی از مصنوعات کوچک: STONEX F6. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، XLII-2/W15 ، 895–901. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]

شکل 1. مطالعات موردی (از چپ به راست): کپی مجسمه سیکلادیک، ماکت سرستون رومی، نیم تنه سنگی فرانسیس جوزف اول از اتریش، و مجسمه کوچک مسیح مصلوب شده.
شکل 2. نمونه هایی از بازسازی های جزئی و حاوی نویز (از چپ به راست): مجموعه داده 1 ARP، مجموعه داده 1 Regard3D 1.0.0 (R3D)، مجموعه داده 3 VCM، مجموعه داده 3 R3D.
شکل 3. مش های جزئی تولید شده با ARP ( سمت چپ ) و FZA ( راست ) از مجموعه داده 9.

شکل 4. نتایج اسکن. مش بدون بافت Stonex F6 SR ( سمت چپ )، بدون بافت FARO Focus 3D X 330 mesh ( مرکز ) و نقشه برداری میدان اسکالر فواصل هاسدورف. حداکثر فاصله قابل مشاهده: 1 سانتی متر

شکل 5. مش های فتوگرامتری بافت دار کپی پیکره، (از چپ به راست) مجموعه داده 1 AMP، مجموعه داده 1 FZA، مجموعه داده 2 AMP، مجموعه داده 2 FZA، مجموعه داده 3 AMP، مجموعه داده 3 FZA.
شکل 6. مش های فتوگرامتری بدون بافت کپی پیکره، (از چپ به راست) مجموعه داده 1 AMP، مجموعه داده 1 FZA، مجموعه داده 2 AMP، مجموعه داده 2 FZA، مجموعه داده 3 AMP، مجموعه داده 3 FZA.

شکل 7. مش های فتوگرامتری بدون بافت از مجموعه داده 4، (از چپ به راست) AMP، FZA، P4D، ARP، VCM.
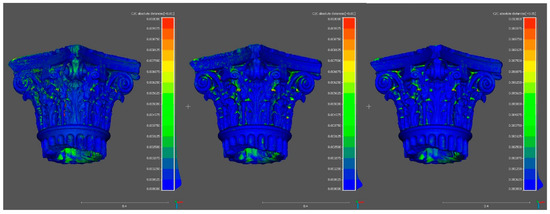
شکل 8. نگاشت میدان اسکالر فواصل هاسدورف برای نتایج فتوگرامتری مجموعه داده 4. انحراف بین مش ARP و مش AMP ( سمت چپ )، انحراف بین مش ARP و مش FZA ( مرکز )، انحراف بین مش ARP و مش P4D ( راست ). حداکثر فاصله قابل مشاهده: 1 سانتی متر

شکل 9. مش های فتوگرامتری بافت دار ماکت بزرگ از مجموعه داده 5 (از چپ به راست): AMP، VCM، R3D.

شکل 10. مش های فتوگرامتری بدون بافت ماکت بزرگ از مجموعه داده 5، (از چپ به راست، و از بالا به پایین): AMP، FZA، P4D، ARP، VCM، R3D.
شکل 11. مش های بدون بافت نیم تنه سنگی از مجموعه داده 6 (از چپ به راست و از بالا به پایین): F6 SR، AMP، FZA، ARP، VCM، R3D.
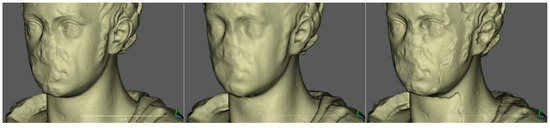
شکل 12. جزئیات مش های فتوگرامتری بدون بافت نیم تنه سنگی از مجموعه داده 6 (از چپ به راست): F6 SR، FZA، ARP.
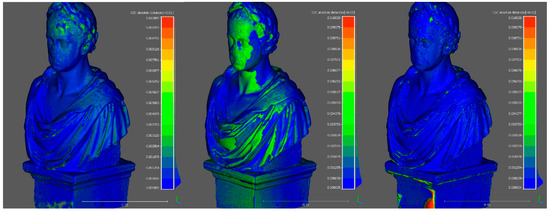
شکل 13. نگاشت میدان اسکالر فواصل هاسدورف برای مجموعه داده 6 نتایج فتوگرامتری. انحراف بین مش AMP و مش FZA ( سمت چپ )، انحراف بین مش AMP و مش ARP ( مرکز )، انحراف بین AMP و مش VCM ( راست ). حداکثر فاصله قابل مشاهده: 1 سانتی متر
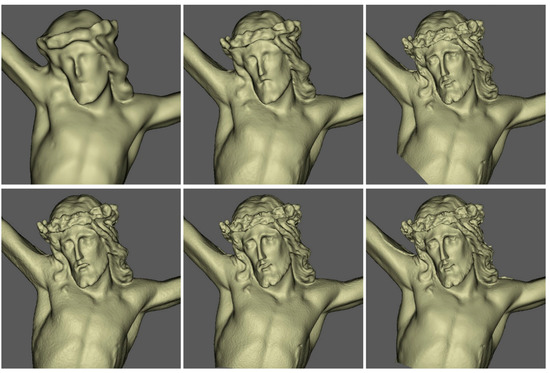
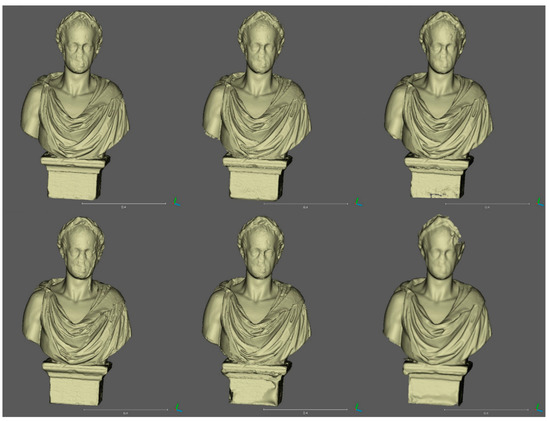
شکل 14. مش های بدون بافت مجسمه کوچک، (از چپ به راست، و از بالا به پایین): F6 SR، AMP–مجموعه داده 7، AMP–مجموعه داده 8، FZA–مجموعه داده 7، FZA–مجموعه داده 8، و ARP–مجموعه داده 8.

شکل 15. مش تولید شده توسط VCM از مجموعه داده 9 (دوربین تلفن هوشمند).
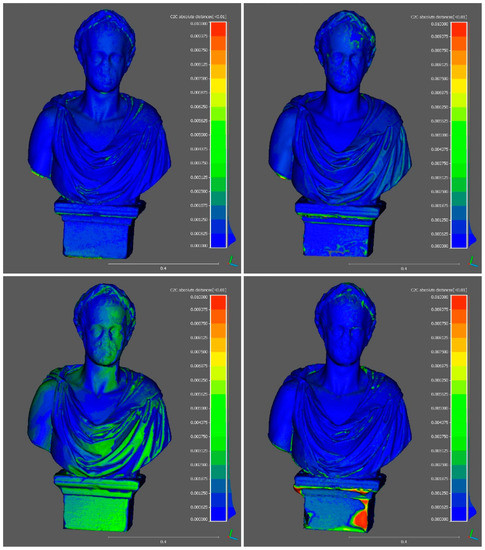
شکل 16. نگاشت میدان اسکالر فواصل هاسدورف بین مجموعه داده 6 نتایج فتوگرامتری و نتایج اسکن. انحراف بین مش F6 SR و مش AMP ( بالا سمت چپ )، انحراف بین مش F6 SR و مش FZA ( بالا سمت راست )، انحراف بین مش F6 SR و مش ARP ( سمت چپ پایین )، انحراف بین F6 SR و مش VCM ( پایین سمت راست )؛ حداکثر فاصله قابل مشاهده: 1 سانتی متر


بدون دیدگاه